

Cooperative Game-Based Collaborative Optimal Regulation-Assisted Digital Twins for Wide-Area Distributed Energy

Abstract
:1. Introduction
2. Mathematical Model of WDE
2.1. Definition of a Digital Twin
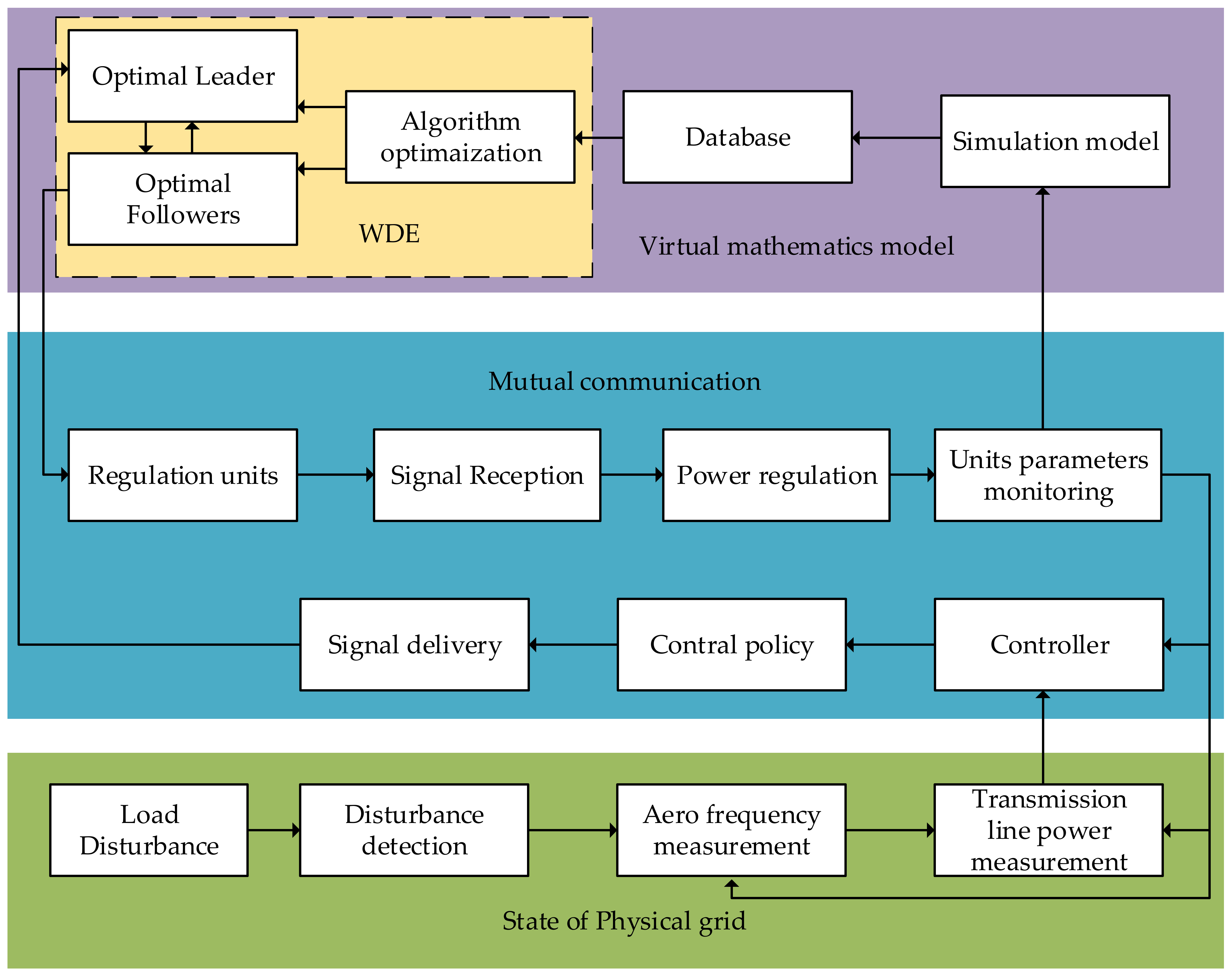
2.2. WDE Dispatch Framework
- (1)
- Firstly, in the virtual mathematics model, the simulation model is very important for the accuracy of optimal scheme selection, and it generally collects the signal from the controller and the units’ operation parameters from the monitors;
- (2)
- Then, in the state of the physical grid model, the power disturbance, area frequency, and transmission line power of the power grid are obtained by sensors, and the model is prepared for real-time optimization for the power dispatch;
- (3)
- Lastly, the mutual communication model is deployed with the regulation units and the controller, and this is the main operation for the dispatch optimization and the physical processing of the simulation model for WDE frequency regulation.
2.3. Objective Function
2.4. Constraints
3. Design of CG-COR for WDE
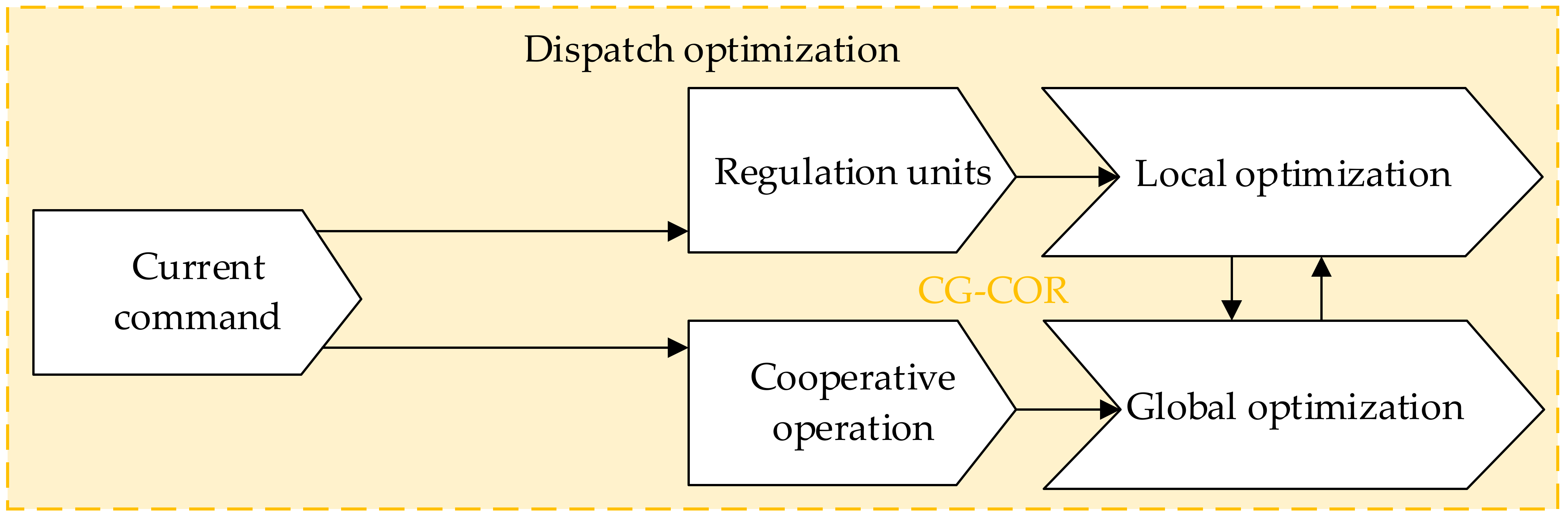
3.1. Framework of CG-COR for WDE
- (1)
- Local optimizer deployment: In the CG-COR framework for WDE, the optimizer is employed to search for the locally optimal result for WDE when the initial parameters for the optimization are created for CG-COR. Each unit is deployed with an optimizer (the optimal follower) and each unit simply communicates with the virtual optimal leader during the optimal process, which can help reduce the computation burden as the grid becomes more and more distributed;
- (2)
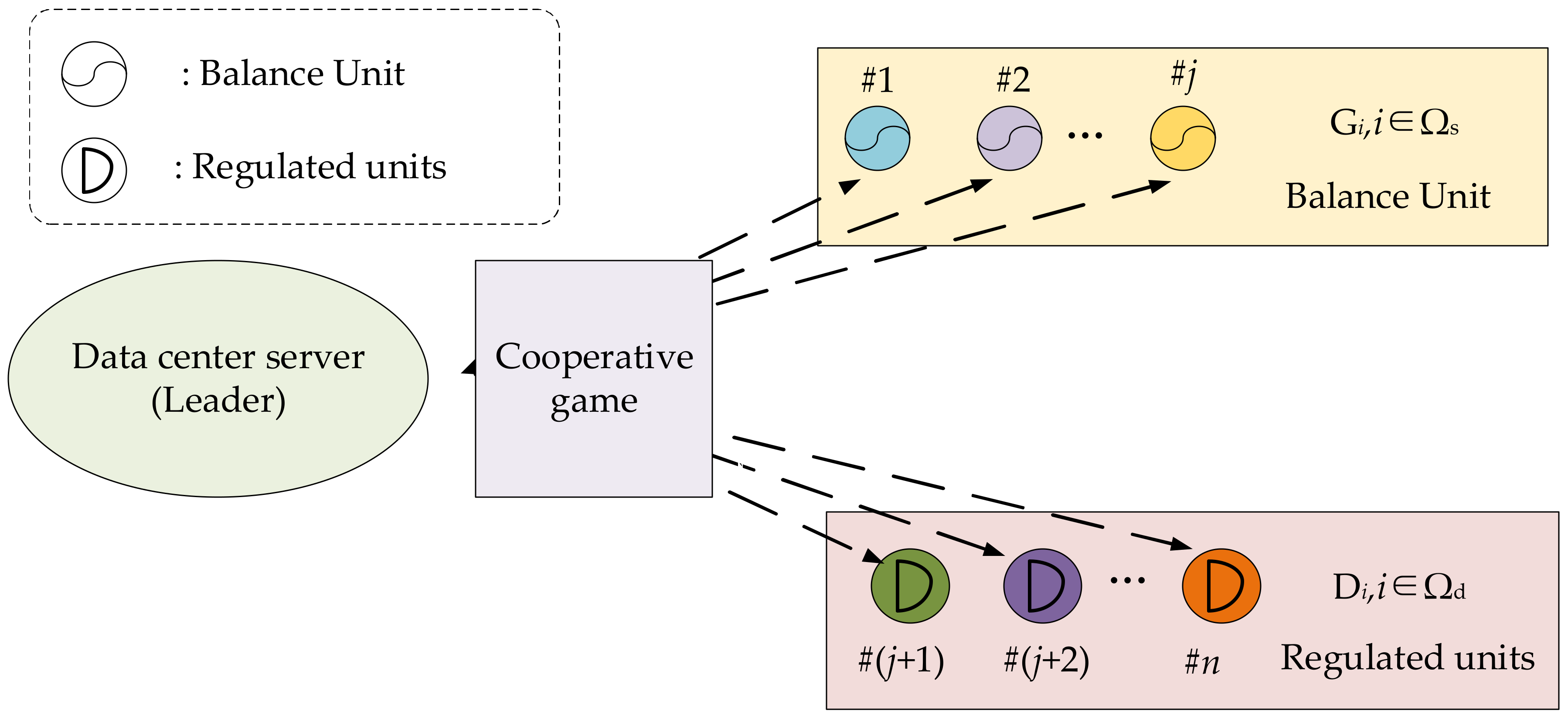
- Global scheme optimization: Optimization of the described scheme is obtained by calculating the total power deviation between the two commands. One is the power input command from the grid to the WDE, and the other is the real power output of the WDE units (the cooperative game’s participants) to the power grid. The global scheme optimization mainly concerns the results obtained by the local optimizers for each unit of the WDE. The communication between the optimal leader and each optimal follower can be realized using the mathematics model. As shown in Figure 4, when the global optimization receives the locally optimal results from the optimizers, the best fitness for the cooperative game in the current iteration will be selected according to the total power deviation. The optimal process for global scheme optimization can be given as follows:
- (a)
- A WDE unit can be regarded as a balanced unit due to the power balance constraint affecting the total units’ input and the total power command (see Equation (3));
- (b)
- Then, the optimal results can be obtained for each unit when the cooperative game is performed well and the maximum benefit function has been reached;
- (c)
- Lastly, the data for the cooperative game are collected in a data center server (optimal leader), which is also the center for the creation of the initial parameters for the optimizer.


3.2. Design of CG-COR
- (1)
- Parameter initialization: Set the dimensions of the problem D, maximum number of iterations T, and maximum number of optimizer iterations g. These parameters maintain the same values in an optimal search;
- (2)
- Population initialization: Set the global optimal position and calculate the global optimal fitness . Firstly, the lower and upper bounds of all optimization variables are set as equal to the lower and upper adjustment capacities of each WDE unit, respectively. Then, an initialized population in the solution space is generated according to proportions of the capacities, as follow:where represents the ith dimension of an initialized solution;
- (3)
- Local search: For the local search, the initial parameter for each follower is formulated using the global optimal scheme. For the ith follower, the other followers’ inputs remain the same in the optimal search and can be set as the value of the last iteration’s solution in the global search. This can help reduce the computation time in the optimal search for the followers. According to the power balance constraint in Equation (2), an arbitrary unit can be regarded as the balanced unit. Firstly, according to the cooperative game framework, if only a unit’s power command is set as the variable, the other n-2 units’ power commands can be set to the fixed values of the global optimal solution , and the balanced units can be given as . Then, an interior point method-based solver is set up to run n-1 iterations for each variable as a basis for a fast search for the global optimal solution for a single variable. Lastly, these optimal results are sent to the optimal leader for the next operation. The optimal formula is as follows:where and represent the objective function and the fitness function for the ith follower in its optimal search, respectively; and represent the power input command from the grid to the balanced unit in the WDE and the real power output of the balanced unit at the kth time control interval, respectively; and represent the maximum power input command and the minimum power output of the balanced unit, respectively; denotes the regulation power ramp for the balanced unit; and represents a faculty coefficient, which was set to 108 in this study;
- (4)
- Local search update: The algorithm for the followers’ solver can be implemented using the interior point method, which is updated with the barrier method;
- (5)
- Global scheme optimization: For global optimization, the optimal leader obtains the optimal resources from each follower, and the best solution in the current iteration is selected according to the best fitness value. The n-1 local best solution at the tth iteration is given as and local best fitness as , which help prepare for the following update;
- (6)
- Optimal location update: The minimum value for the local best fitness as is employed to update the current global optimal fitness and the corresponding local best solution for the current global optimal position . According to the cooperative game’s rule, the optimal scheme with the best fitness value for the optimal leader is selected. Then, the initial parameters for each optimizer are updated according to the optimal scheme created by the optimal leader. The optimal search continues in a cycle between steps (2)–(4) until the subsequent termination conditions satisfy the required settings;
- (7)
- Termination conditions: If the current global optimal fitness is larger than that of the last iteration or the current iteration t reaches the maximum of iteration T, the optimal search is terminated.
3.3. Calculation Flow
| Algorithm 1. The execution procedure for ARMA-GA for WDE. |
|
4. Case Studies
4.1. Statistical Test Experiments
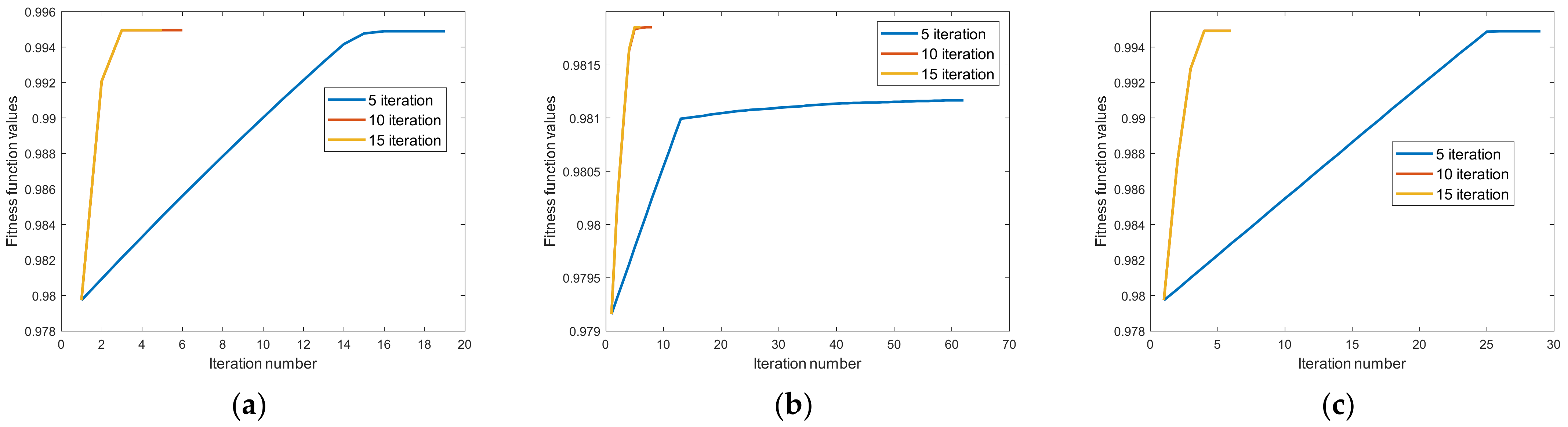
4.1.1. Convergence for the Followers’ Search
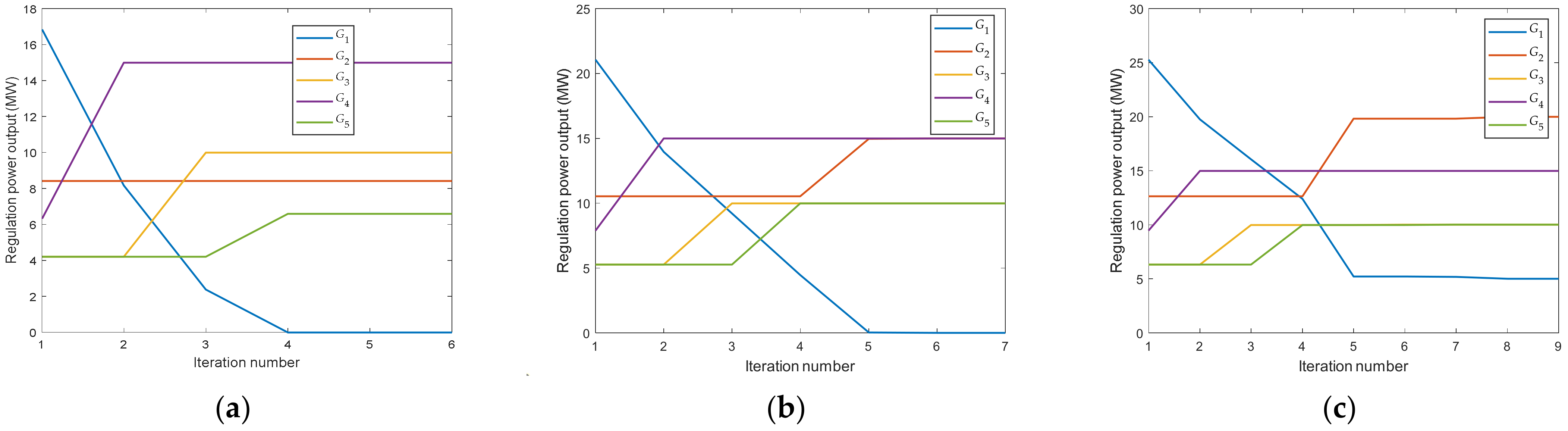
4.1.2. Optimal Power Command for Global Search
4.2. Statistical Test Experiments
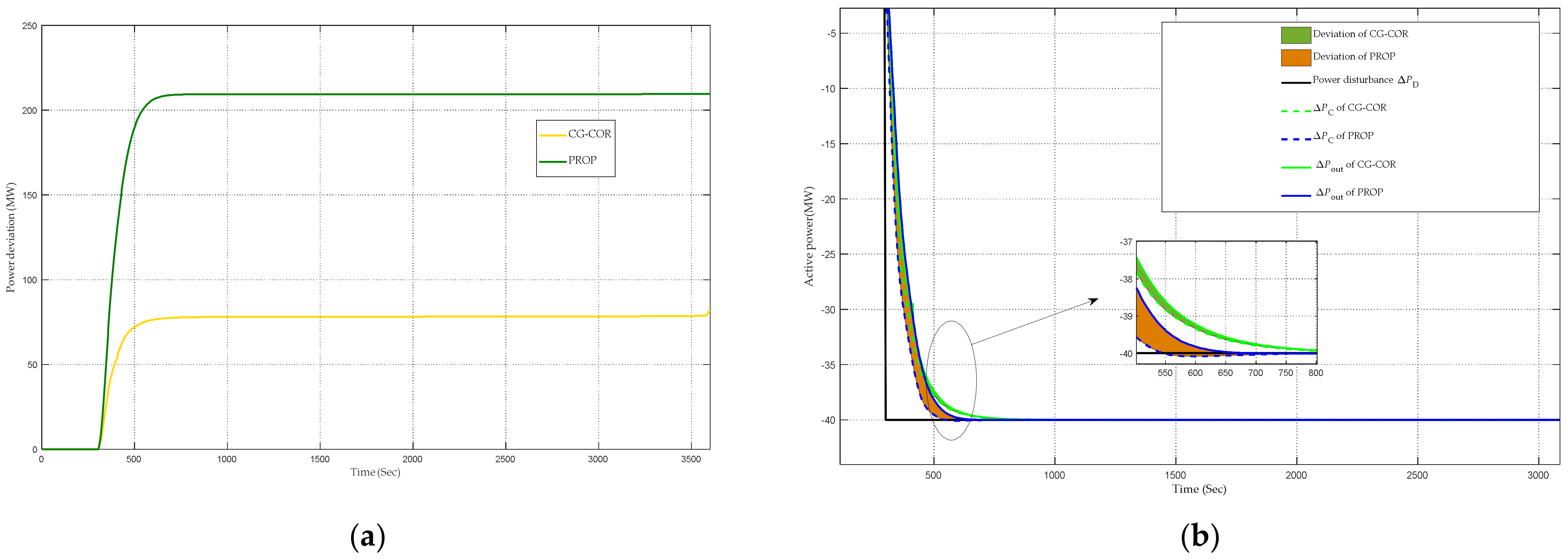
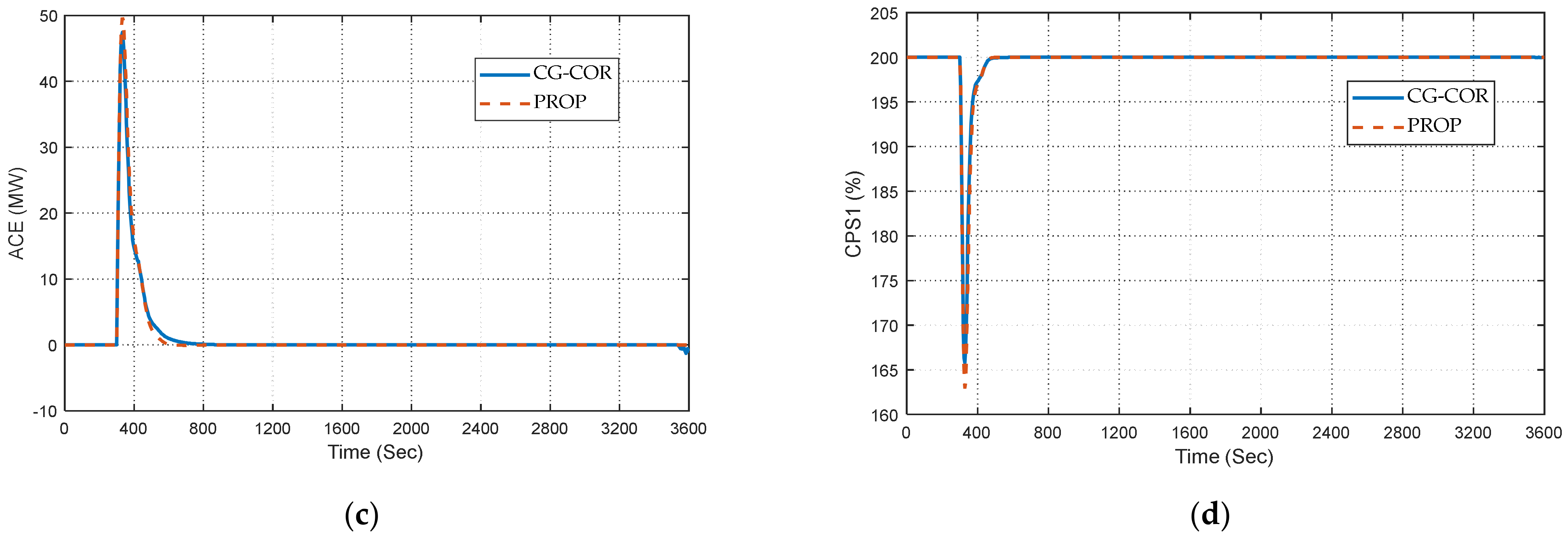
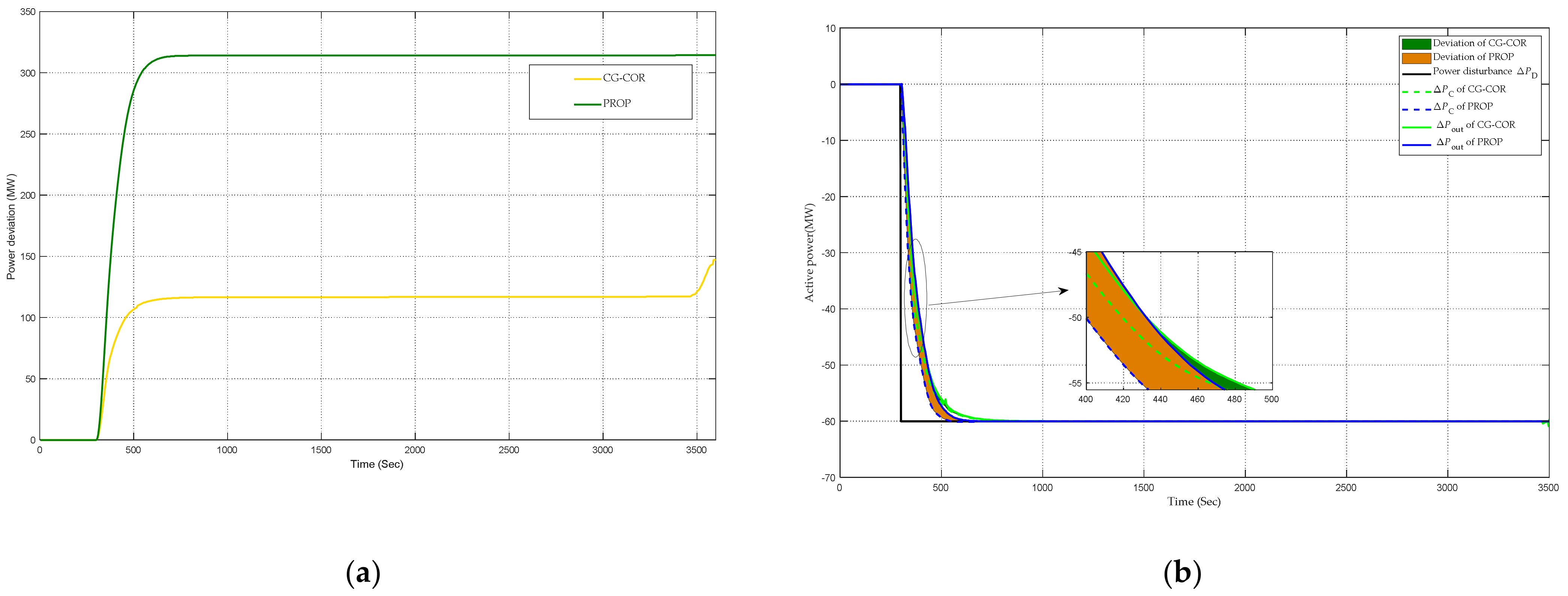
4.2.1. Step Load Disturbance
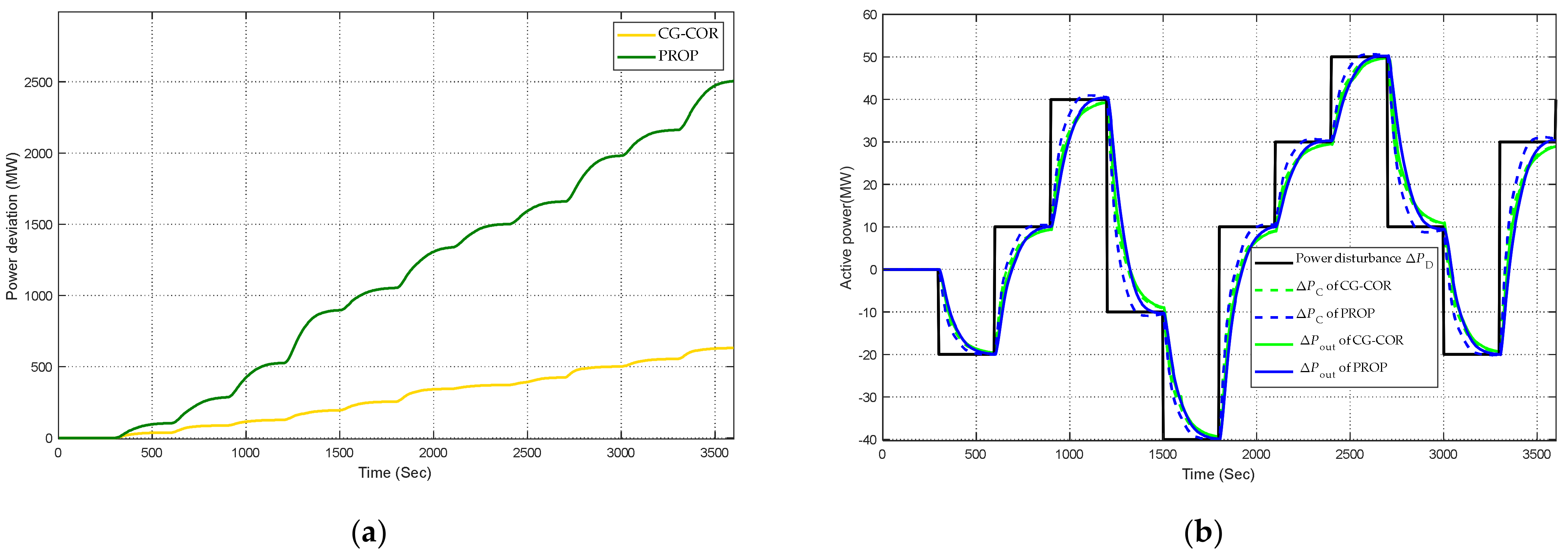
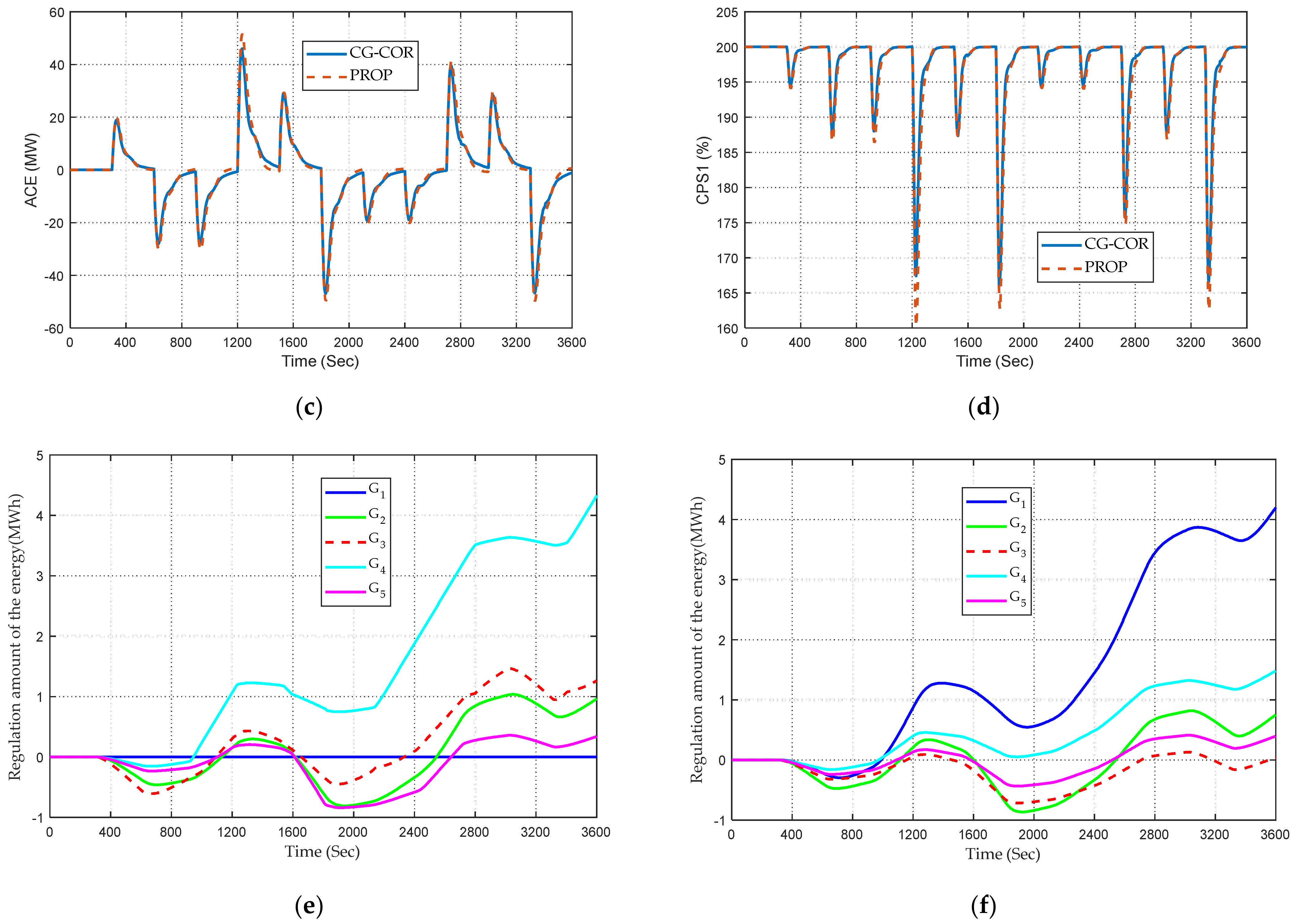
4.2.2. Continuous Step Load Disturbance
5. Conclusions
- (1)
- A digital twin-based WDE model is proposed that can fully coordinate all regulated units and fully considers and rationally utilizes new energy units;
- (2)
- A form of cooperative game optimization-based WDE scheduling is proposed that can reasonably allocate power commands for multiple control resource systems. The proposed leader-and-follower mode can help reduce the optimization time due to the distributed optimization process;
- (3)
- Through the simulation and comparison experiments performed with the WDE model, it was found that the optimal WDE scheduling scheme based on the cooperative game optimization algorithm could solve the scheduling problem more effectively;
- (4)
- The proposed CG-COR model could effectively coordinate the regulation resources for WDE units. It enhanced the intensity of the closeness between the total power input command and output curve, and it reduced the total power deviation by 61.1%, 55.7%, 53.1%, and 74.8%, respectively.
- (1)
- As the number of electric vehicles is likely to increase significantly in the future, the master–slave game could be considered to rationally guide the charging and discharging of electric vehicles and reduce the cost of electricity;
- (2)
- A large number of flexible loads are involved in the operation of power systems, resulting in convenience for the demand response, while the game model becomes more complex. Therefore, it is necessary to study the demand response based on an incomplete information game;
- (3)
- Power losses will be considered in a future study. The optimization will take into account factors such as transmission and conversion losses. The topology of the grid and regulation resources will also be analyzed in a future study.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ACE | area control error |
| CPS1 | control performance standard |
| CG-COR | cooperative game-based collaborative optimal regulation |
| GRC | generation regulation constraint |
| LNG | liquefied natural gas |
| PROP | proportional method |
| PV | photovoltaic |
| WDE | wide-area distributed energy |
| WF | wind farm |
References
- Wang, X.; Cai, T. Research on traditional power grid enterprise transforming to energy internet enterprise. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 23–29. [Google Scholar] [CrossRef]
- Kim, W.W.; Shin, J.S.; Kim, J.O. Operation strategy of multi-energy storage system for ancillary service. IEEE Trans. Power Syst. 2016, 32, 4409–4417. [Google Scholar] [CrossRef]
- Dutta, S.; Sharma, R. Optimal storage sizing for integrating wind and load forecast uncertain- ties. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies, Washington, DC, USA, 16–20 January 2012. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Shahidehpour, M.; Wu, L. Enhancing the dispatchability of variable wind generation by coordination with pumped-storage hydro units in stochastic power systems. IEEE Trans. Power Syst. 2013, 28, 2808–2818. [Google Scholar] [CrossRef]
- Shi, L.; Luo, Y.; Tu, G.; Shi, N. Energy storage sizing method considering dispatchability of wind farm. Trans. China Electrotech. Soc. 2013, 28, 120–127+134. [Google Scholar] [CrossRef]
- Mégel, O.; Mathieu, J.L.; Andersson, G. Scheduling distributed energy storage units to provide multiple services under forecast error. Int. J. Electr. Power Energy Syst. 2015, 72, 48–57. [Google Scholar] [CrossRef]
- Schleich, B.; Anwer, N.; Mathieu, L.; Wartzack, S. Shaping the digital twin for design and production engineering. Cirp Ann. Manuf. Technol. 2017, 66, 141–144. [Google Scholar] [CrossRef] [Green Version]
- Grieves, M.W. Product lifecycle management: The new paradigm for enterprises. Int. J. Prod. Dev. 2005, 2, 71–84. [Google Scholar] [CrossRef]
- Chen, Y.; Mei, S.; Zhou, F.; Low, S.H.; Wei, W.; Liu, F. An energy sharing game with generalized demand bidding: Model and properties. IEEE Trans. Smart Grid 2020, 11, 2055–2066. [Google Scholar] [CrossRef] [Green Version]
- Pan, H.; Dou, Z.; Cai, Y.; Li, W.; Lei, X.; Han, D. Digital twin and its application in power system. In Proceedings of the 2020 5th International Conference on Power and Renewable Energy, Shanghai, China, 12–14 September 2020; pp. 21–26. [Google Scholar] [CrossRef]
- Zhou, M.; Yan, J.; Feng, D. Digital twin framework and its application to power grid online analysis. CSEE J. Power Energy Syst. 2019, 5, 391–398. [Google Scholar] [CrossRef]
- Wang, H.; Ponciroli, R.; Vilim, R.; Alfonsi, A.; Rabiti, C. A Recursive Data-Driven Approach to State Variable Selection and Digital Twin Derivation. In Proceedings of the 12th International Topical Meeting on Nuclear Plant Instrumentation, Control and Human Machine Interface Technologies, Providence, RI, USA, 13–17 June 2021. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, B.; Sun, H. Energy management and distributed energy resources cluster control for active distribution networks. Autom. Electr. Power Syst. 2020, 44, 111–118. [Google Scholar] [CrossRef]
- Sun, D.-Q.; Zheng, J.-W.; Zhang, T.; Zhang, Z.-J.; Liu, H.-T.; Zhao, F.; Qiu, Z.-J. The utilization and development strategies of smart grid and new energy. In Proceedings of the 2021 Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010; IEEE: New York, NY, USA, 2010; pp. 1–4. [Google Scholar] [CrossRef]
- He, T.; Li, S.; Wu, S.; Li, C.; Xu, B. Biobjective optimization-based frequency regulation of power grids with high-participated renewable energy and energy storage systems. Math. Probl. Eng. 2021, 2021, 5526492. [Google Scholar] [CrossRef]
- Li, J.; Yu, T.; Zhang, X.; Li, F.; Lin, D.; Zhu, H. Efficient experience replay based deep deterministic policy gradient for AGC dispatch in integrated energy system. Appl. Energy 2021, 285, 116386. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Z.; Yu, T.; Yang, B.; Wang, H. Optimal Mileage Based AGC Dispatch of a GenCo. IEEE Trans. Power Syst. 2020, 35, 2516–2526. [Google Scholar] [CrossRef]
- Zhang, X.S.; Yu, T.; Yang, B.; Li, L. Virtual generation tribe based robust collaborative consensus algorithm for dynamic generation command dispatch optimization of smart grid. Energy 2016, 101, 34–51. [Google Scholar] [CrossRef]
- Zhang, X.S.; Li, Q.; Yu, T.; Yang, B. Consensus transfer Q-learning for decentralized generation command dispatch based on virtual generation tribe. IEEE Trans. Smart Grid 2018, 9, 2152–2165. [Google Scholar] [CrossRef]
- Zhang, X.S.; Yu, T. Fast stackelberg equilibrium learning for real-time coordinated energy control of a multi-area integrated energy system. Appl. Therm. Eng. 2019, 153, 225–241. [Google Scholar] [CrossRef]
- Seven, S.; Yao, G.; Soran, A.; Onen, A.; Muyeen, S.M. Peer-to-peer energy trading in virtual power plant based on blockchain smart contracts. IEEE Access 2020, 8, 175713–175726. [Google Scholar] [CrossRef]
- Le, J.; Liao, X.; Zhang, Y.; Chang, J.X.; Lu, J. Review and prospect on distributed model predictive control method for power system. Autom. Electr. Power Syst. 2020, 44, 179–191. [Google Scholar] [CrossRef]
- Wu, J.; Ai, X. Optimal operation of prosumers based on transactive energy mechanism. Autom. Electr. Power Syst. 2020, 44, 1–18. [Google Scholar] [CrossRef]
- Sun, G.; Wang, S.; Chen, S.; Wu, C.; Hu, G.; Zhou, Y.; Wei, Z. Stackelberg game model for energy management of multiple prosumer aggregators based on bilevel Kriging meta model algorithm. Electr. Power Autom. Equip. 2021, 41, 8–16. [Google Scholar]
- Uysal, C.; Kurt, H.; Kwak, H.-Y. Exergetic and thermoeconomic analyses of a coal-fired power plant. Int. J. Therm. Sci. 2017, 117, 106–120. [Google Scholar] [CrossRef]
- Smajla, I.; Sedlar, D.K.; Drljaca, B.; Jukic, L. Fuel switch to lng in heavy truck traffic. Energies 2019, 12, 19. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Jiang, C.; Ai, Q.; Wang, C. The key technology of offshore wind farm and its new development in china. Renew. Sustain. Energy Rev. 2009, 13, 216–222. [Google Scholar]
- Bazrafshan, M.; Yalamanchili, L.; Gatsis, N.; Gomez, J. Stochastic planning of distributed pv generation. Energies 2019, 12, 459. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit No. | Type | Td (s) | (MW) | ||
|---|---|---|---|---|---|
| G1 | Coal-fired | 60 | 30 | 40 | −20 |
| G2 | LNG | 20 | 18 | 20 | −30 |
| G3 | Hydro | 5 | 150 | 10 | −20 |
| G4 | WF | 1 | — | 15 | −10 |
| G5 | PV | 1 | — | 10 | −15 |
| 5 Generations (s) | 10 Generations (s) | 15 Generations (s) | |
|---|---|---|---|
| −80 | 4.322 | 0.305 | 0.166 |
| −70 | 1.427 | 0.178 | 0.171 |
| −60 | 0.859 | 0.278 | 0.239 |
| −50 | 0.785 | 0.295 | 0.258 |
| −40 | 0.538 | 0.322 | 0.278 |
| −30 | 0.405 | 0.327 | 0.306 |
| −20 | 0.336 | 0.229 | 0.275 |
| −10 | 0.221 | 0.269 | 0.272 |
| 0 | 0.267 | 0.224 | 0.310 |
| 10 | 0.350 | 0.270 | 0.211 |
| 20 | 0.554 | 0.353 | 0.251 |
| 30 | 0.786 | 0.297 | 0.254 |
| 40 | 1.294 | 0.224 | 0.215 |
| 50 | 2.257 | 0.220 | 0.155 |
| 60 | 1.947 | 0.237 | 0.147 |
| 70 | 1.515 | 0.183 | 0.142 |
| 80 | 4.322 | 0.305 | 0.166 |
| Method | Accuracy (%) | Deviation (MW) | |
|---|---|---|---|
| −40 MW | CG-COR | 91.32 | 81.60 |
| PROP | 90.96 | 209.65 | |
| Single WDE | 89.32 | 804.28 | |
| −50 MW | CG-COR | 91.29 | 116.00 |
| PROP | 90.96 | 262.02 | |
| Single WDE | 89.32 | 1005.27 | |
| −60 MW | CG-COR | 91.28 | 147.59 |
| PROP | 90.96 | 314.43 | |
| Single WDE | 89.32 | 1260.80 | |
| Disturbance 1 (see Figure 10a) | CG-COR | 88.23 | 631.18 |
| PROP | 79.18 | 2504.87 | |
| Single WDE | 62.74 | 6675.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, P.; Ye, Z.; Cao, C.; Guo, Z.; Zhao, J.; He, X. Cooperative Game-Based Collaborative Optimal Regulation-Assisted Digital Twins for Wide-Area Distributed Energy. Energies 2023, 16, 2598. https://0-doi-org.brum.beds.ac.uk/10.3390/en16062598
Ni P, Ye Z, Cao C, Guo Z, Zhao J, He X. Cooperative Game-Based Collaborative Optimal Regulation-Assisted Digital Twins for Wide-Area Distributed Energy. Energies. 2023; 16(6):2598. https://0-doi-org.brum.beds.ac.uk/10.3390/en16062598
Chicago/Turabian StyleNi, Pengcheng, Zhiyuan Ye, Can Cao, Zhimin Guo, Jian Zhao, and Xing He. 2023. "Cooperative Game-Based Collaborative Optimal Regulation-Assisted Digital Twins for Wide-Area Distributed Energy" Energies 16, no. 6: 2598. https://0-doi-org.brum.beds.ac.uk/10.3390/en16062598