
Application of a Bidirectional DC/DC Converter to Control the Power Distribution in the Battery–Ultracapacitor System




Abstract
:1. Introduction
1.1. Literature Review
1.2. Contribution of the Paper
2. Materials and Methods
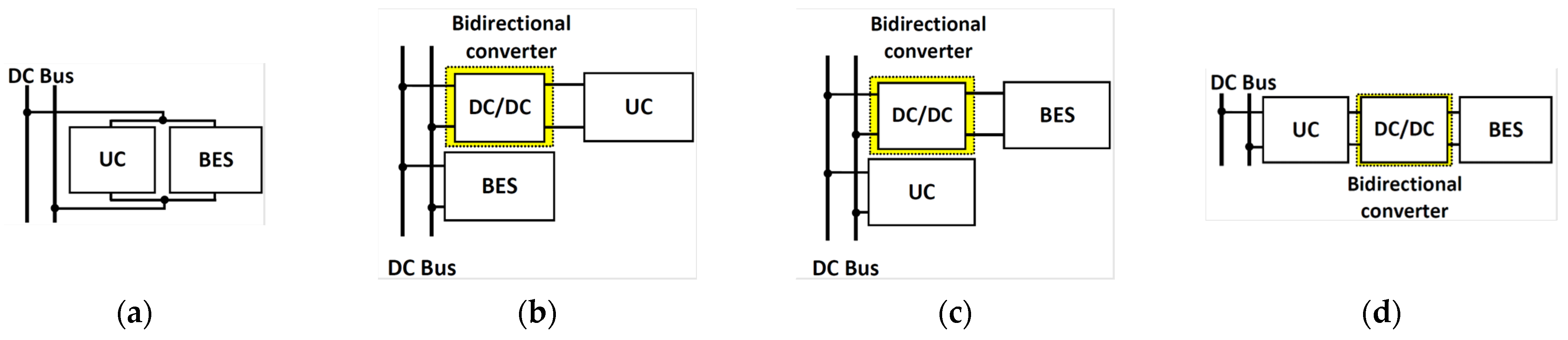
2.1. Battery and Ultracapacitor Connection Topologies
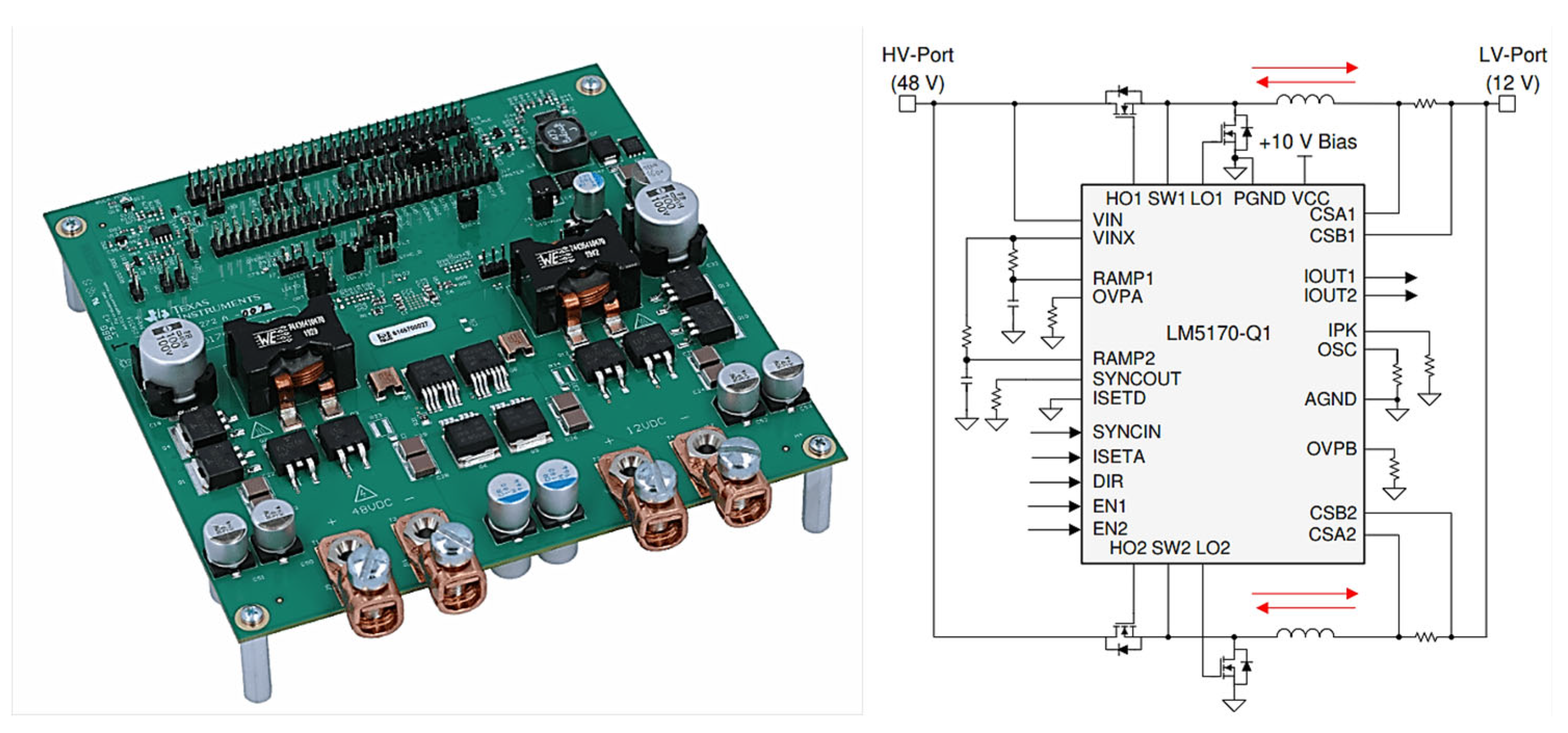
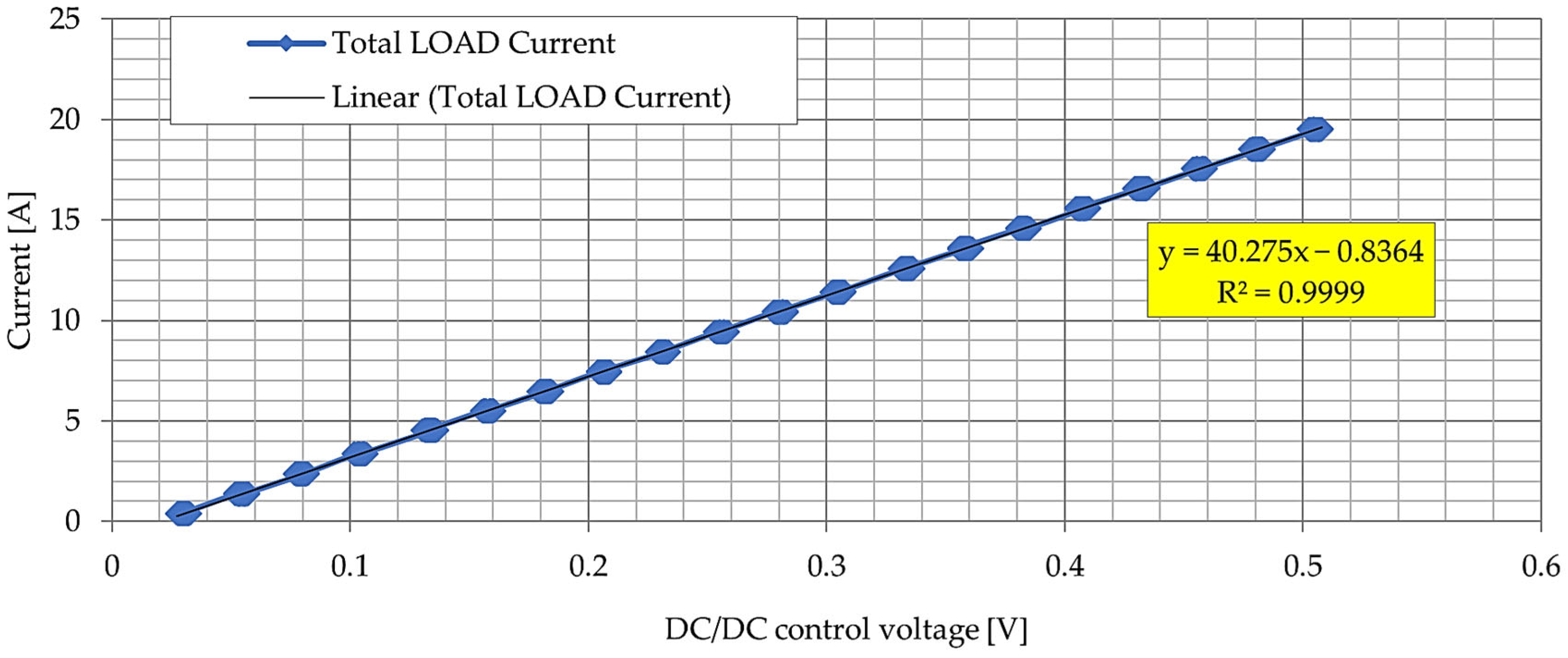
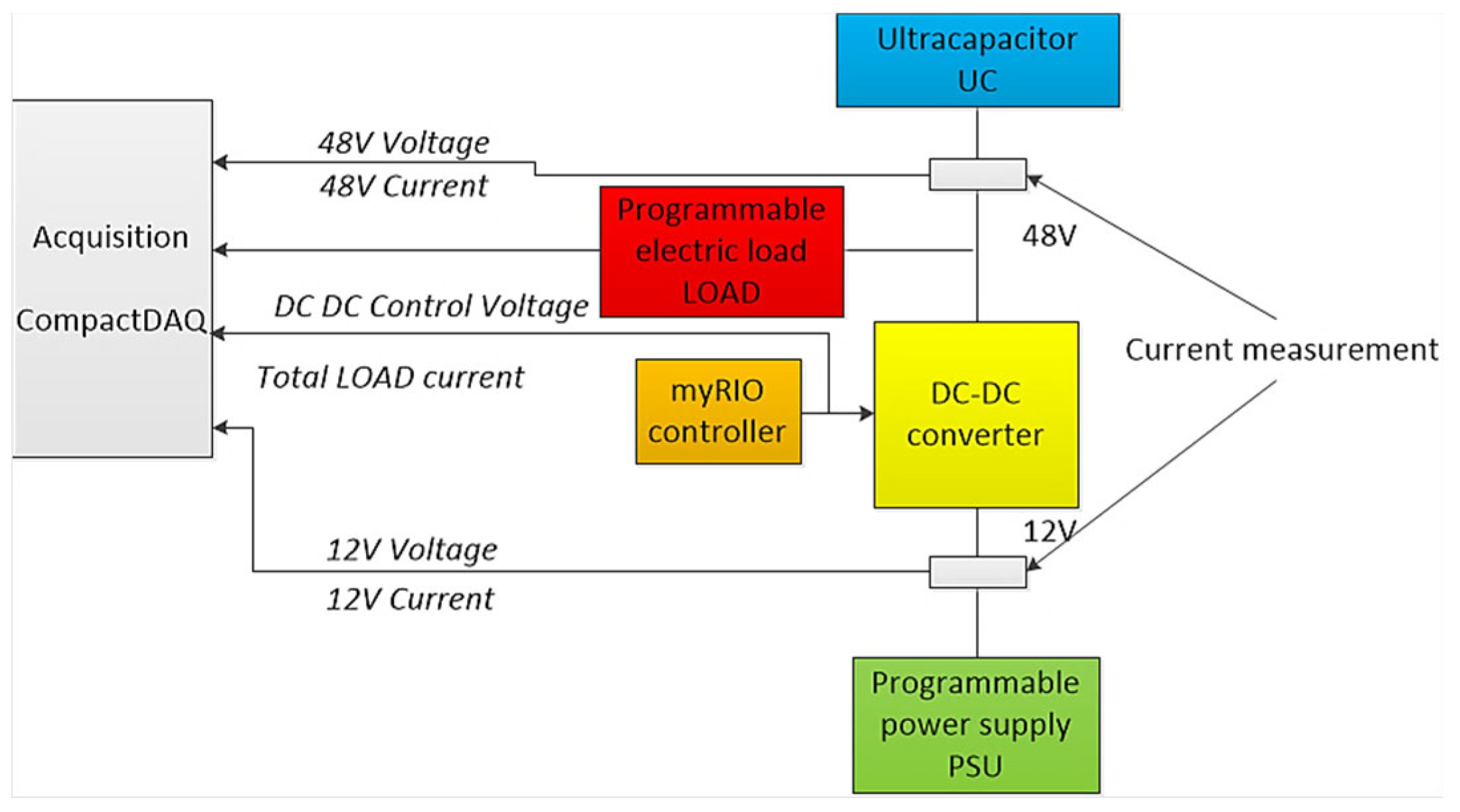
2.2. DC/DC Converter Calibration
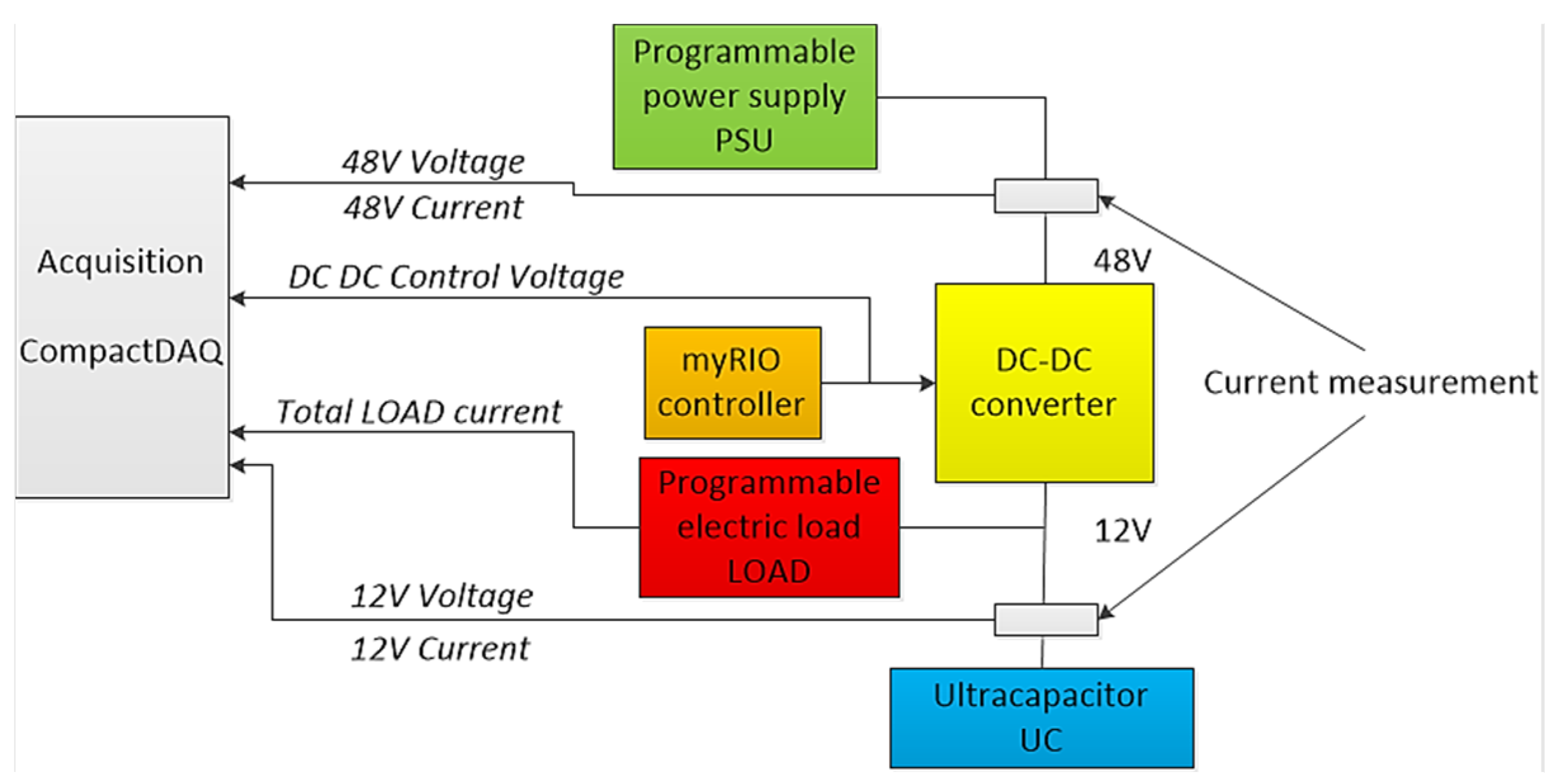
- TTI CPX400DP programmable DC power supply (PSU);
- TTI LD400P programmable DC load (LOAD);
- National Instruments CompactDAQ 9174 recording device, equipped with an analog input card NI 9206 (cDAQ);
- National Instruments myRIO controller to control the operation of the DC/DC converter;
- Texas Instruments bidirectional DC/DC converter module, model LM5170EVM-BIDIR;
- PICO TA018 current-voltage converters (current clamps).
- 12 V Voltage—voltage on the DC/DC converter on the low-voltage side (nominal 12 V);
- 12 V Current—current flowing through the DC/DC converter on the low-voltage side (nominal 12 V);
- 48 V Voltage—voltage on the DC/DC converter on the high-voltage side (nominal 48 V);
- 48 V Current—current flowing through the DC/DC converter on the high-voltage side (48 V nominal);
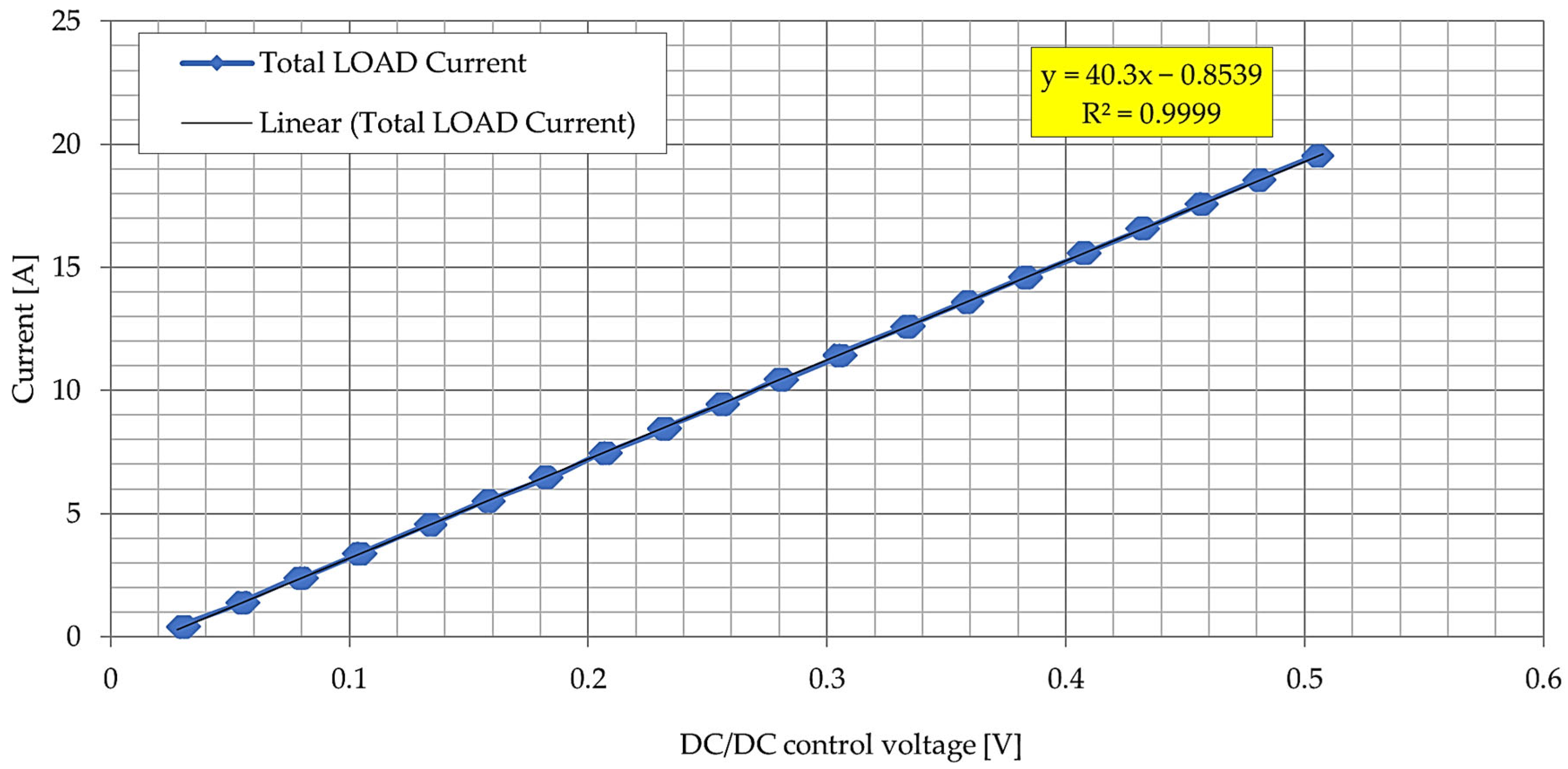
- Total LOAD Current—value of the current consumed by the programmable load;
- DC Control Voltage—control voltage of the DC/DC converter.
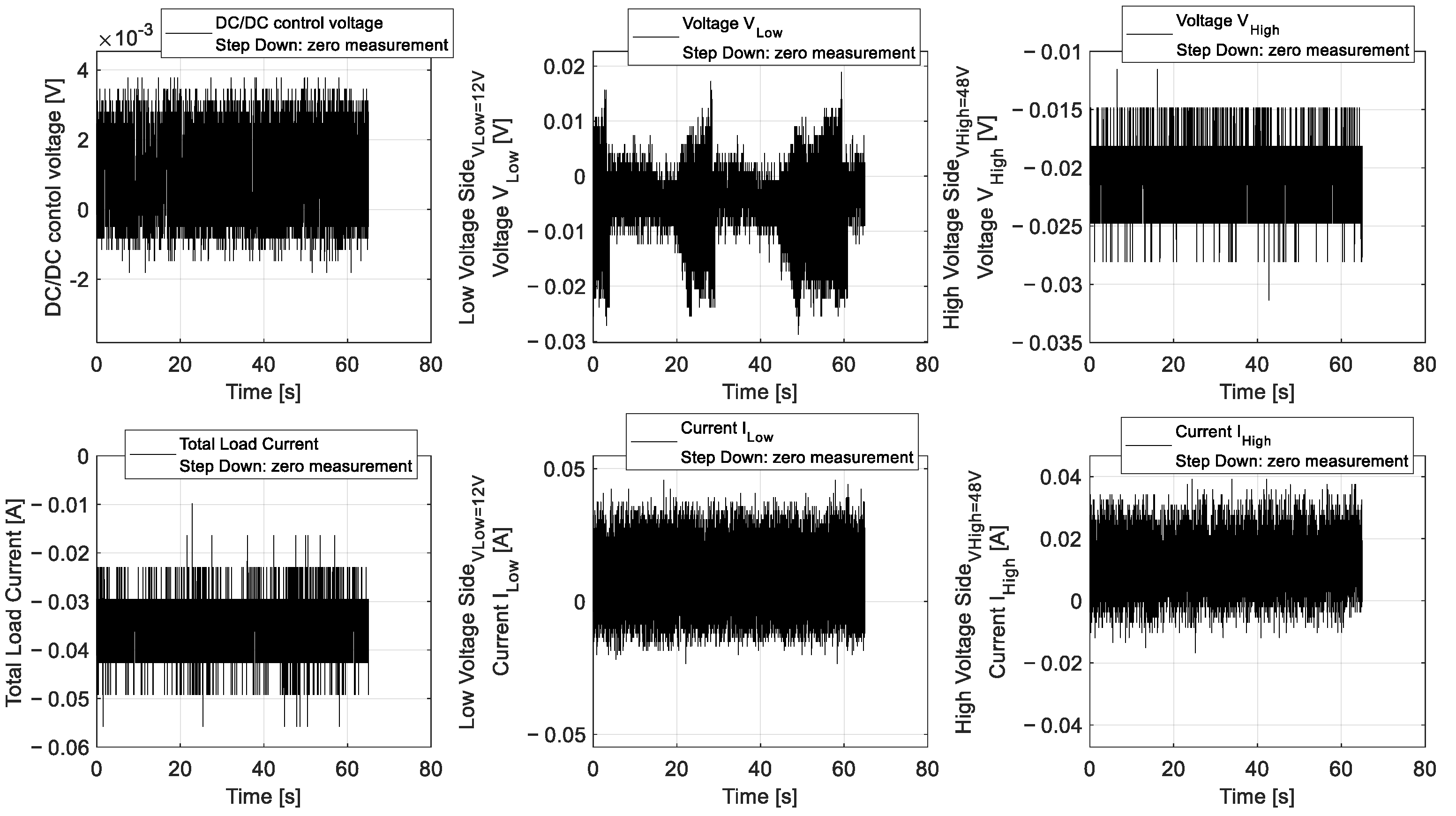
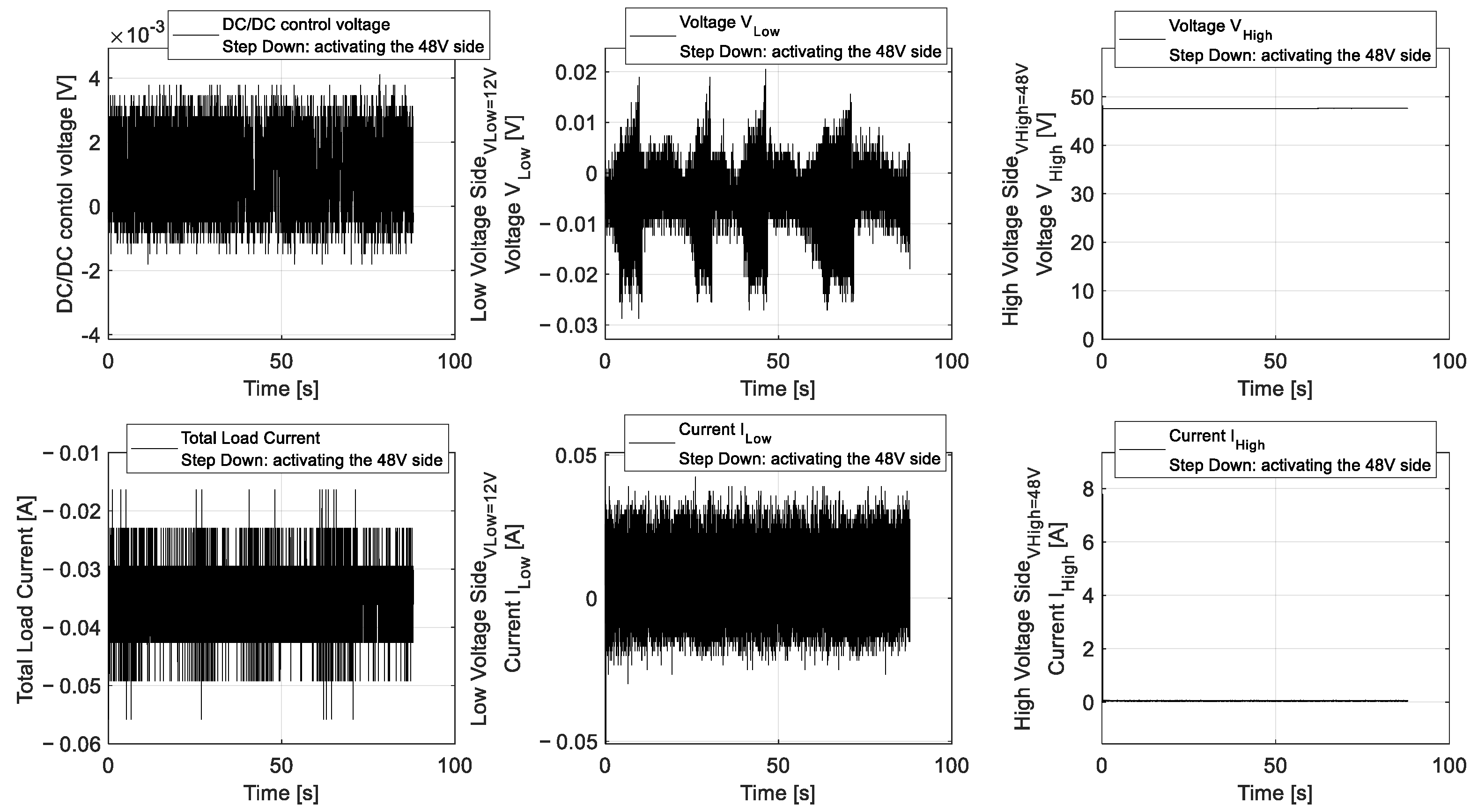
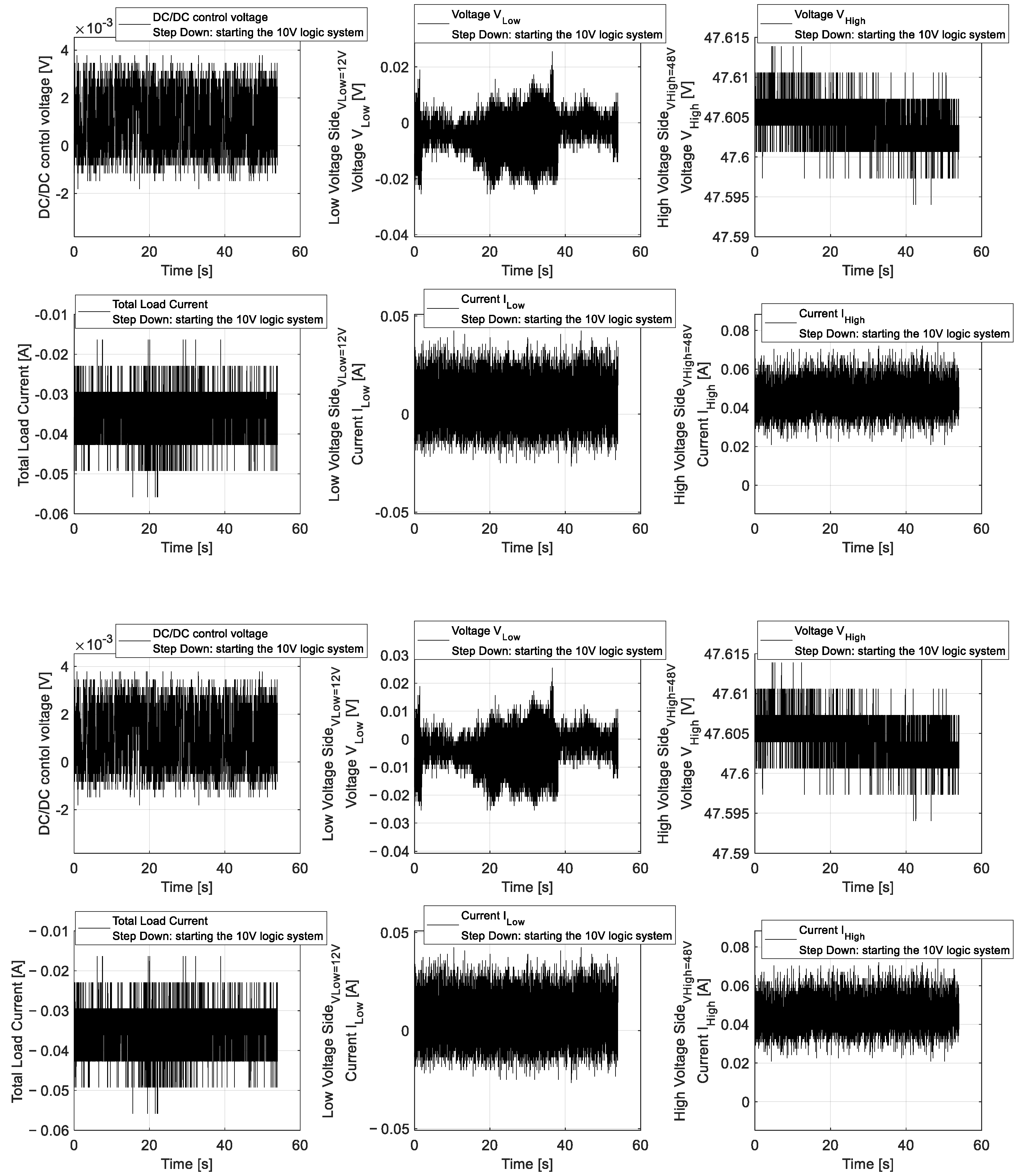
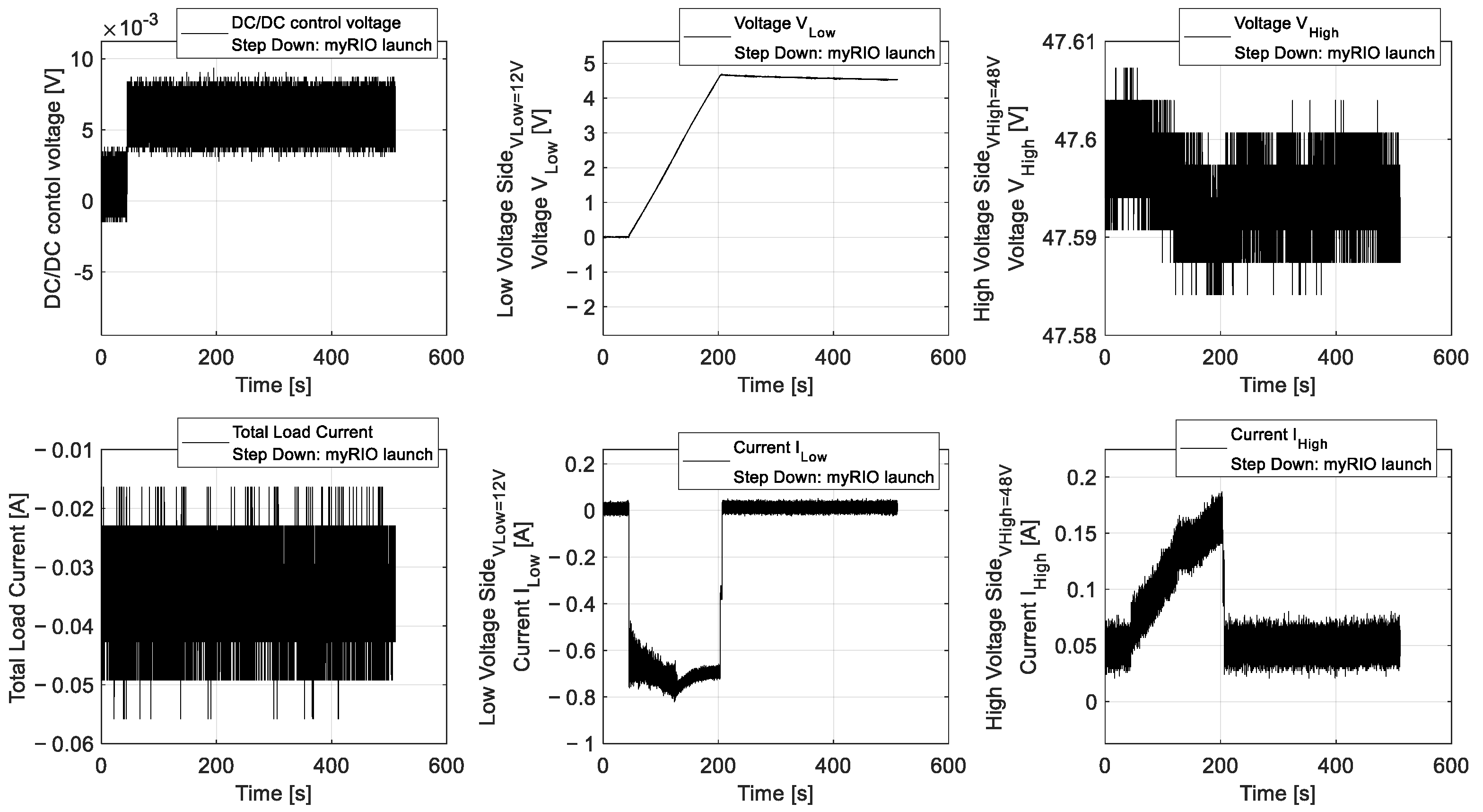
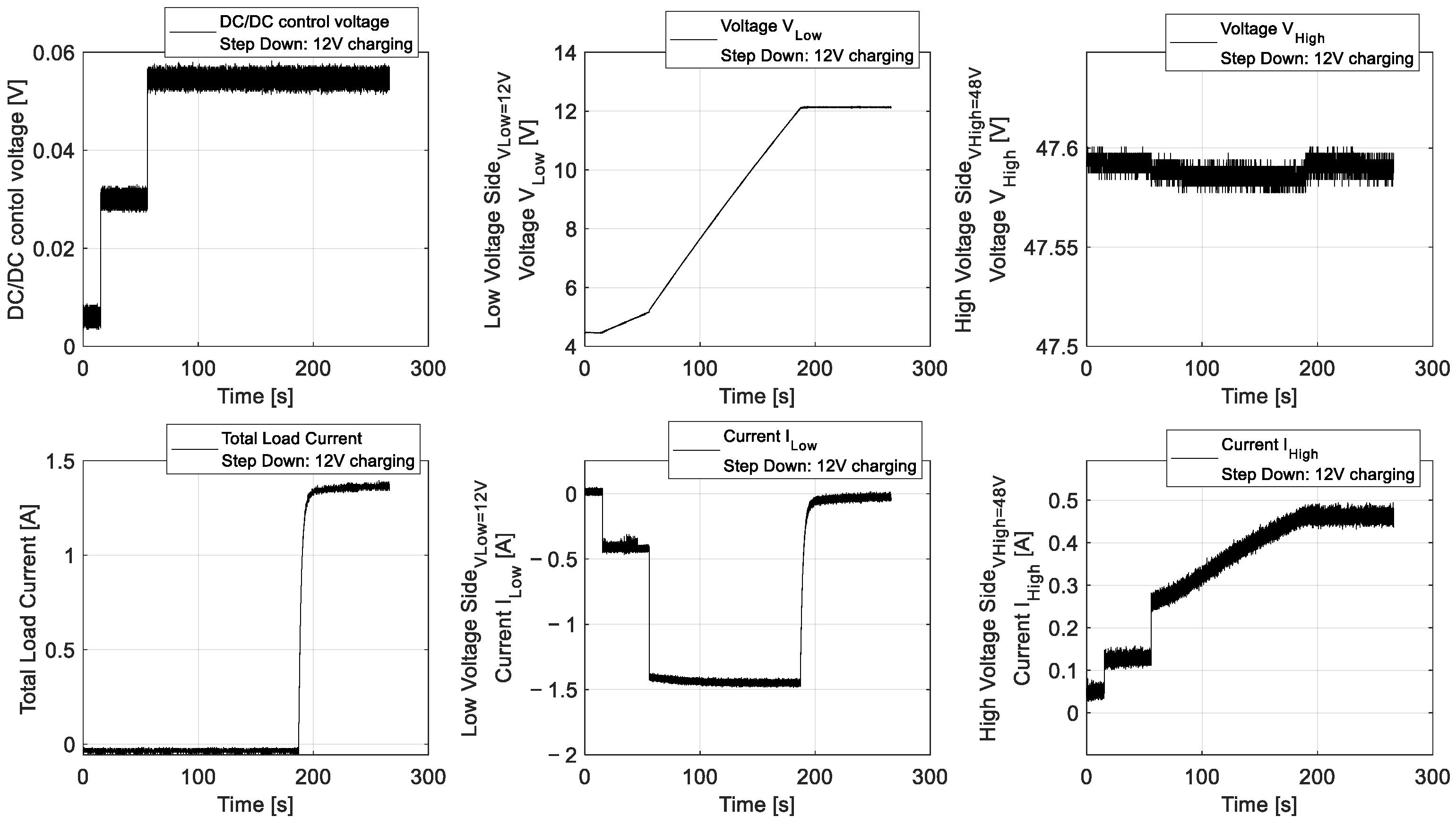
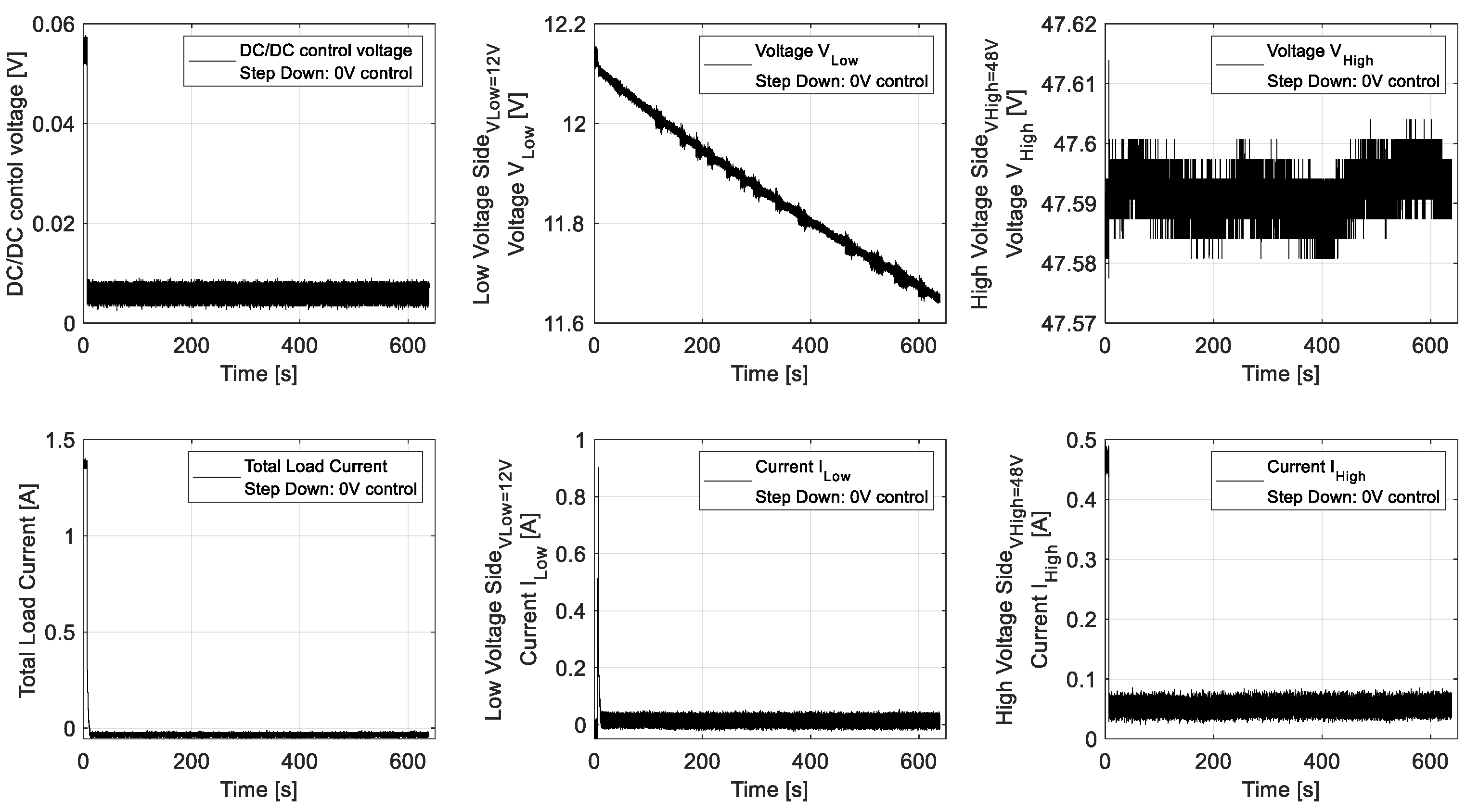
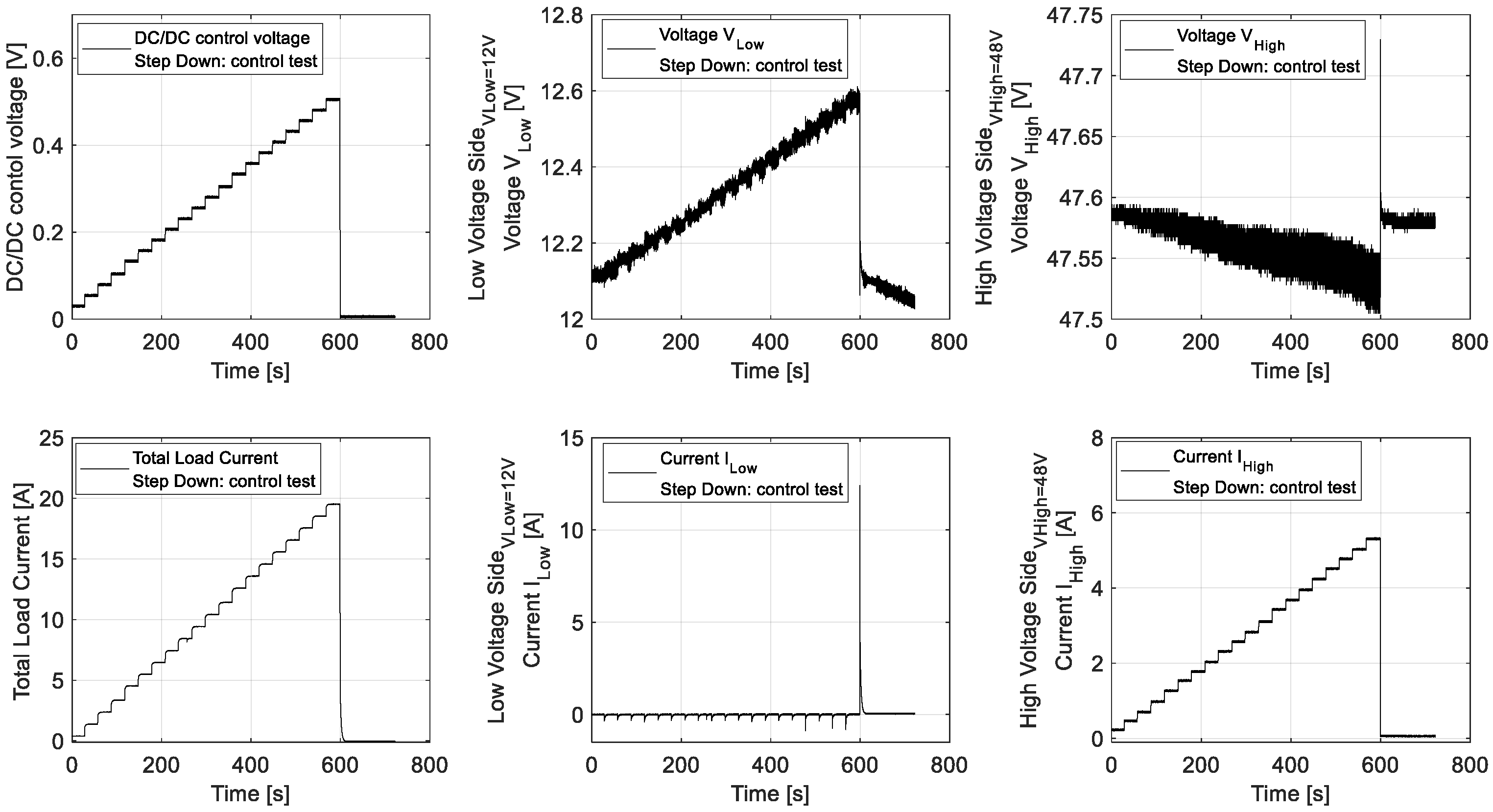
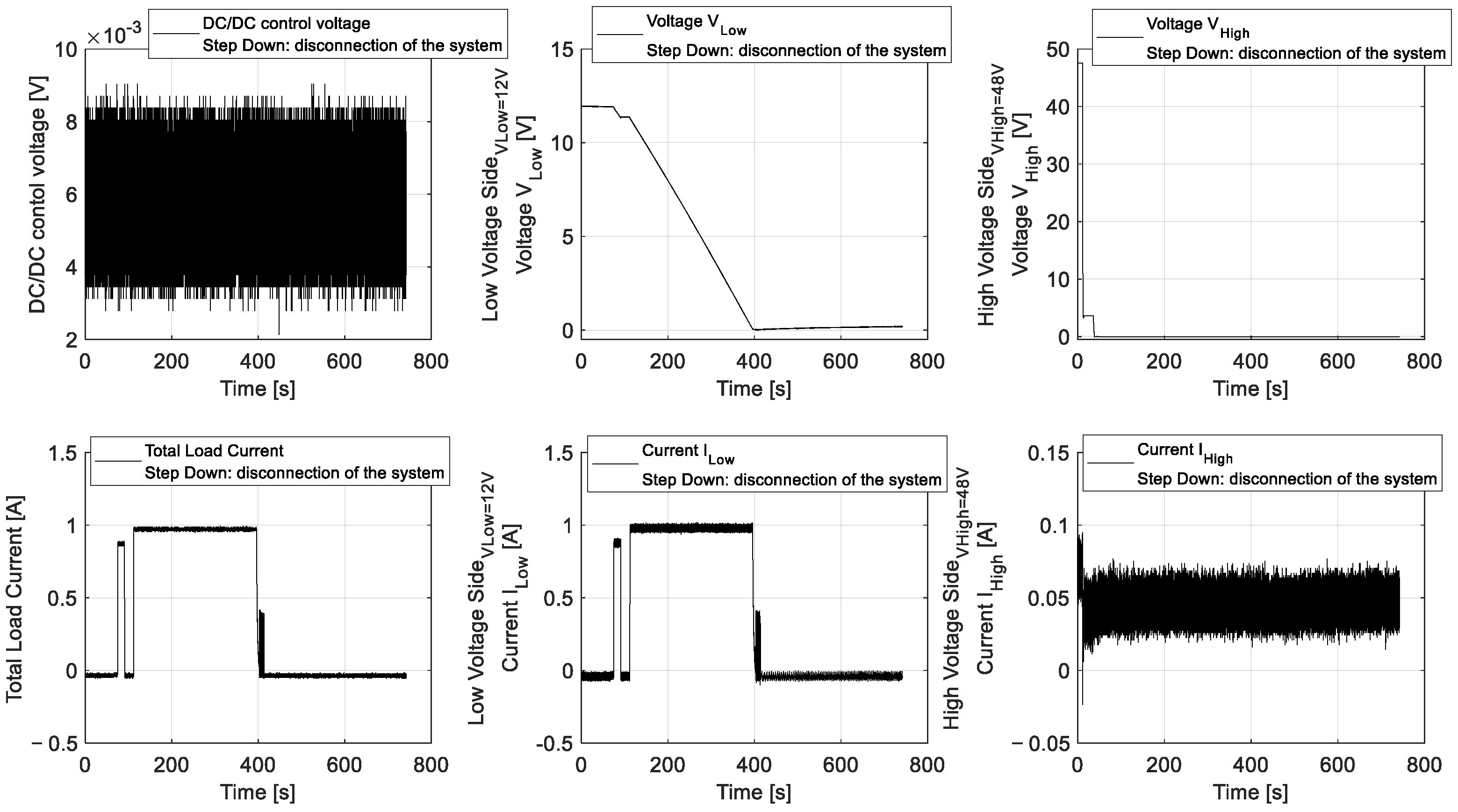
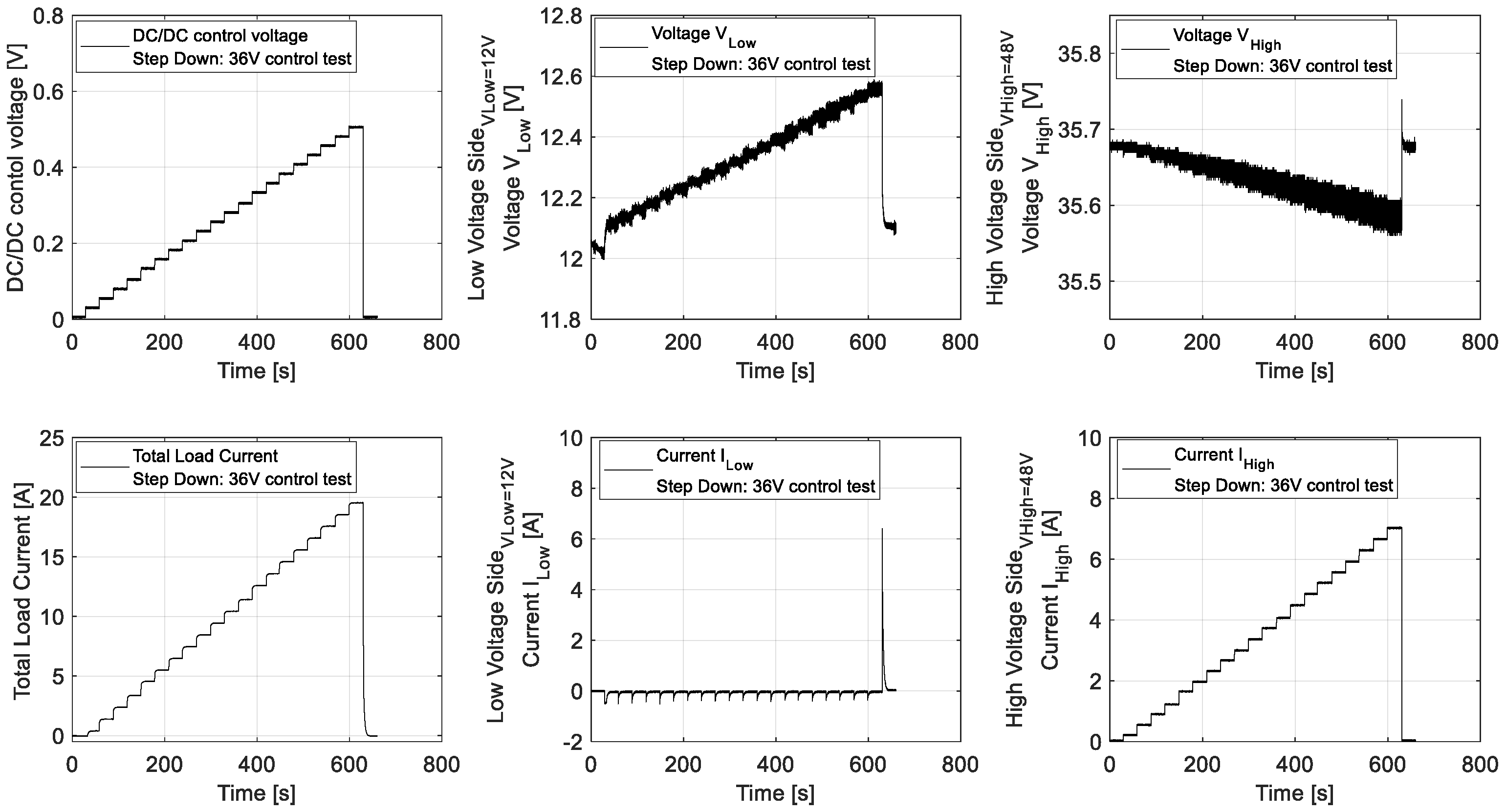
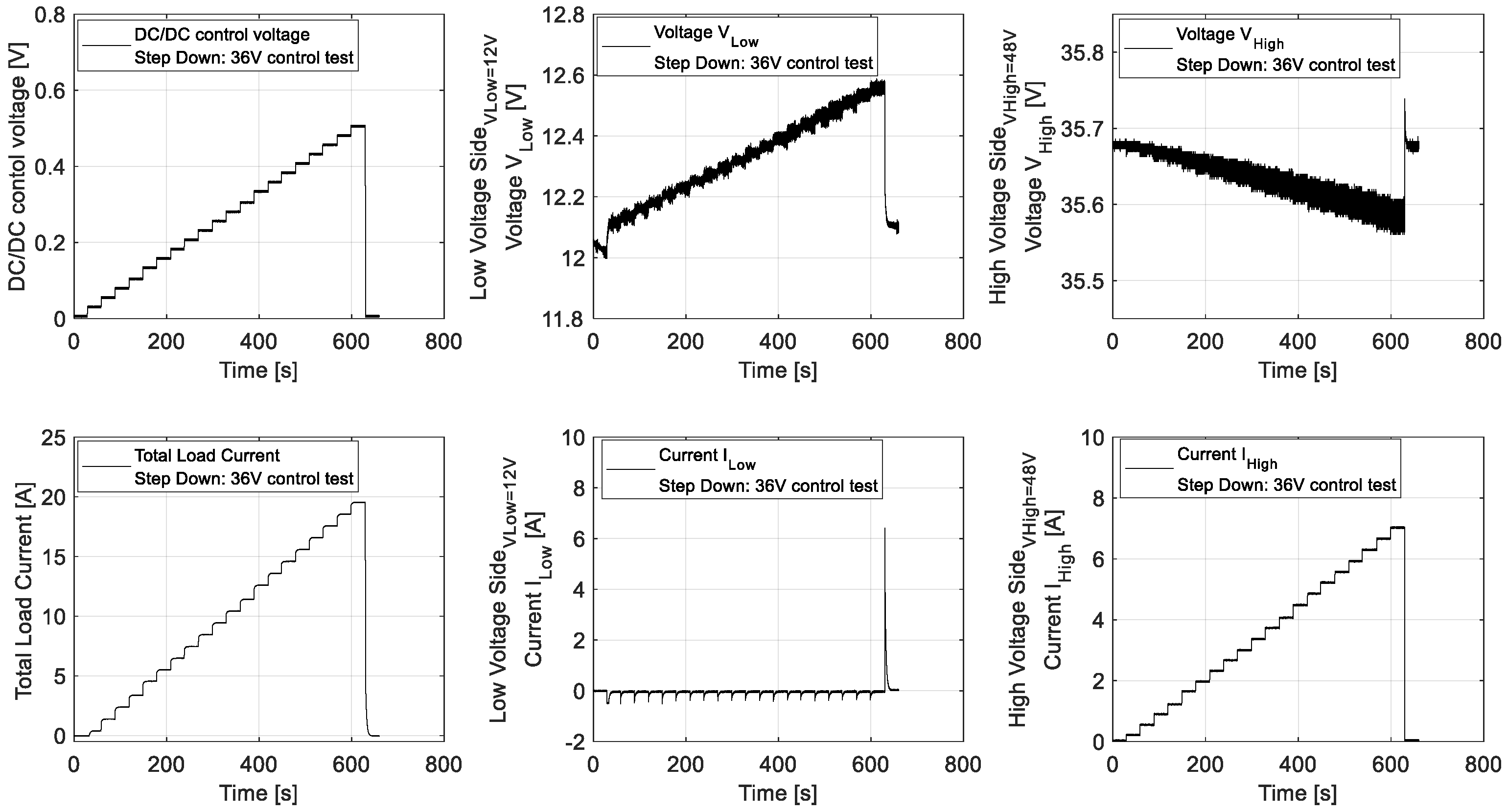
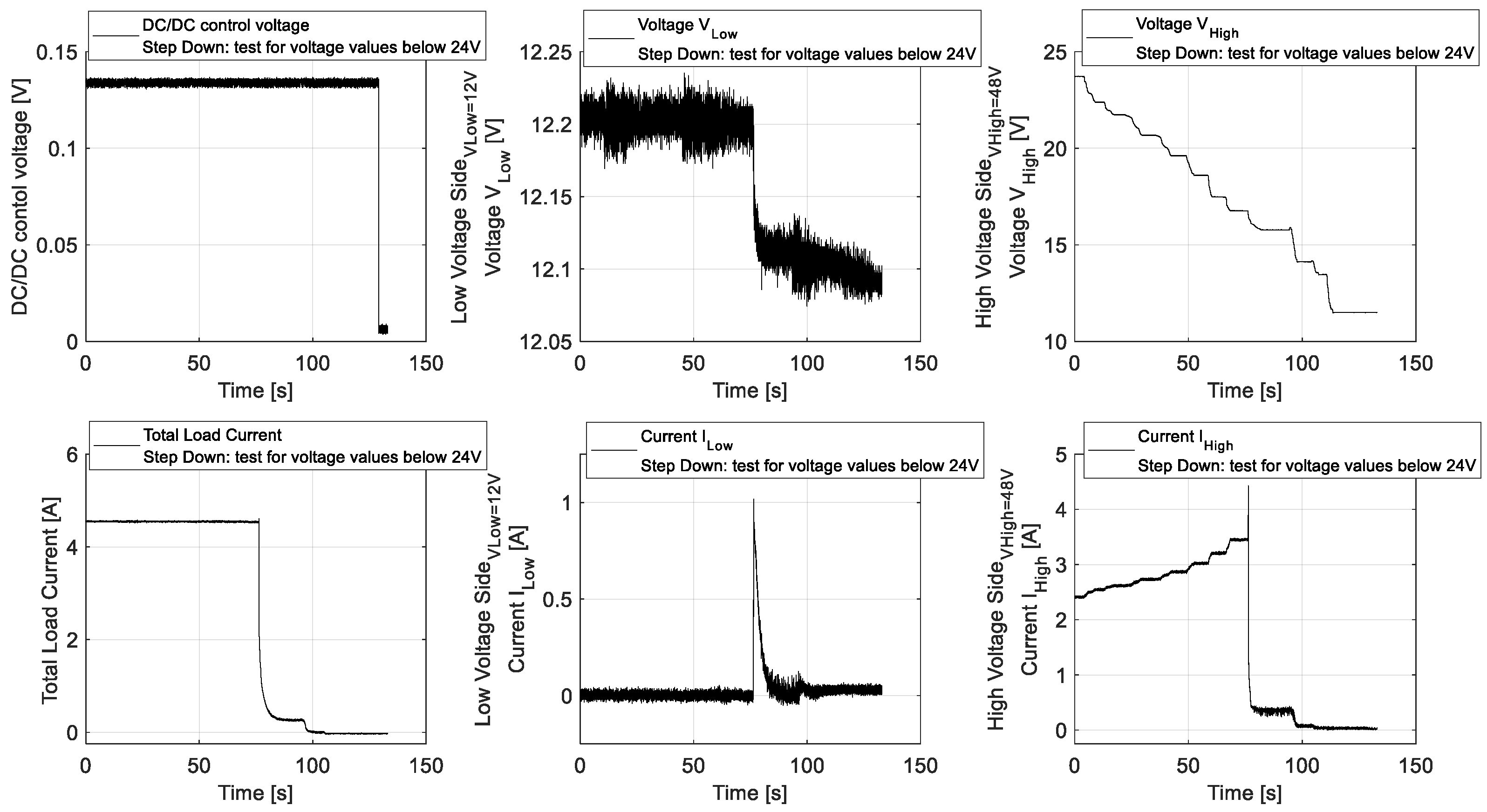
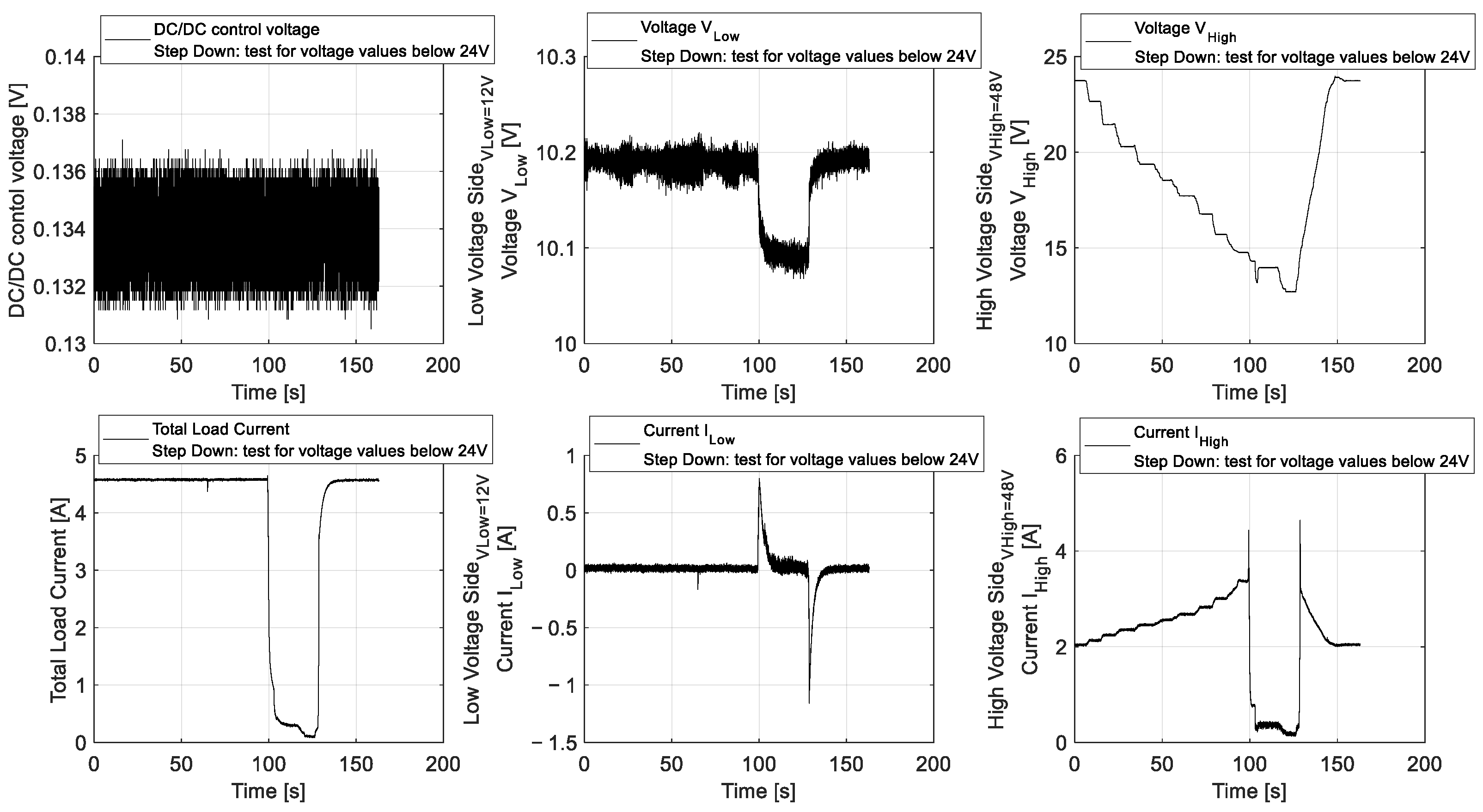
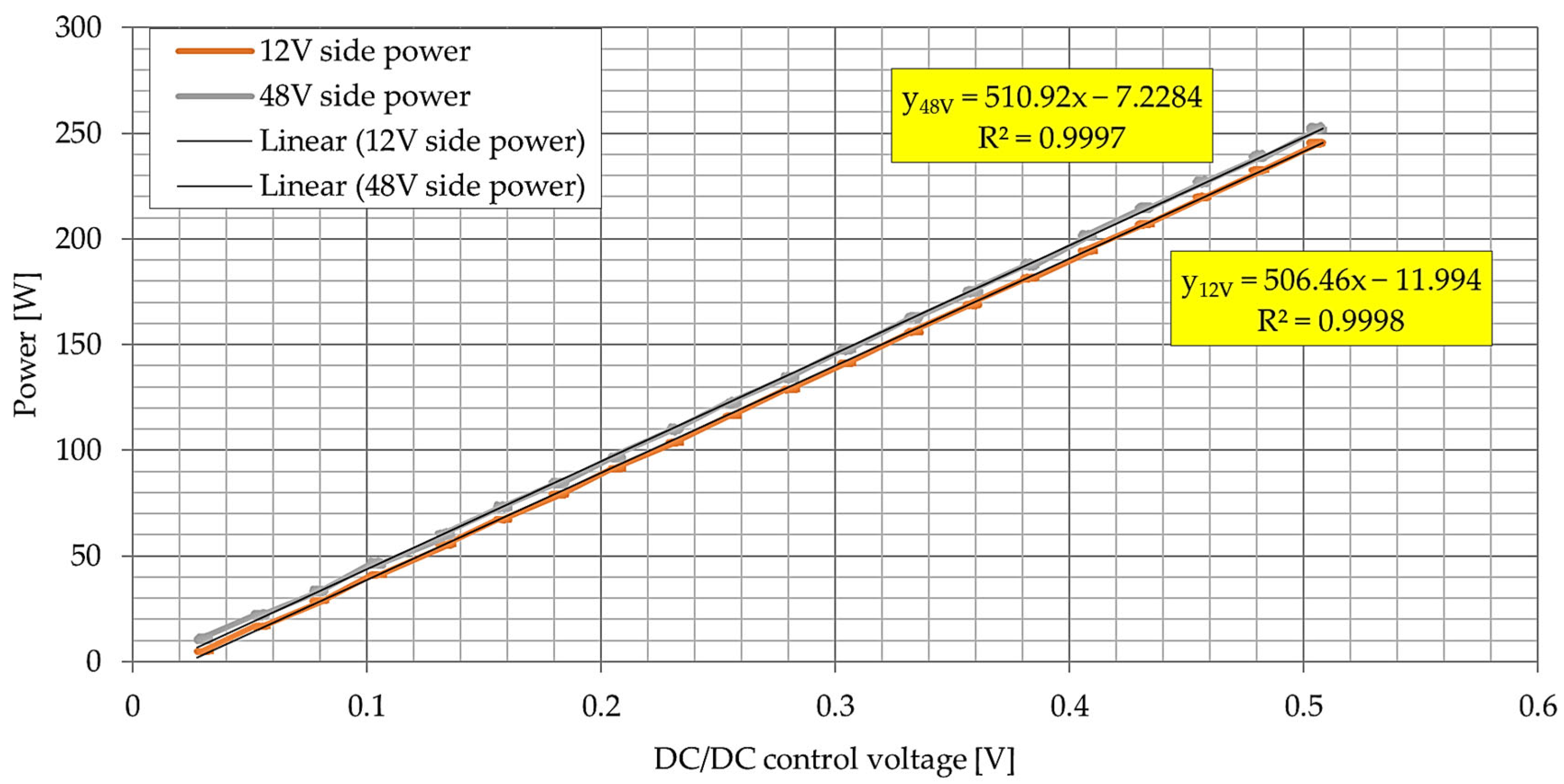
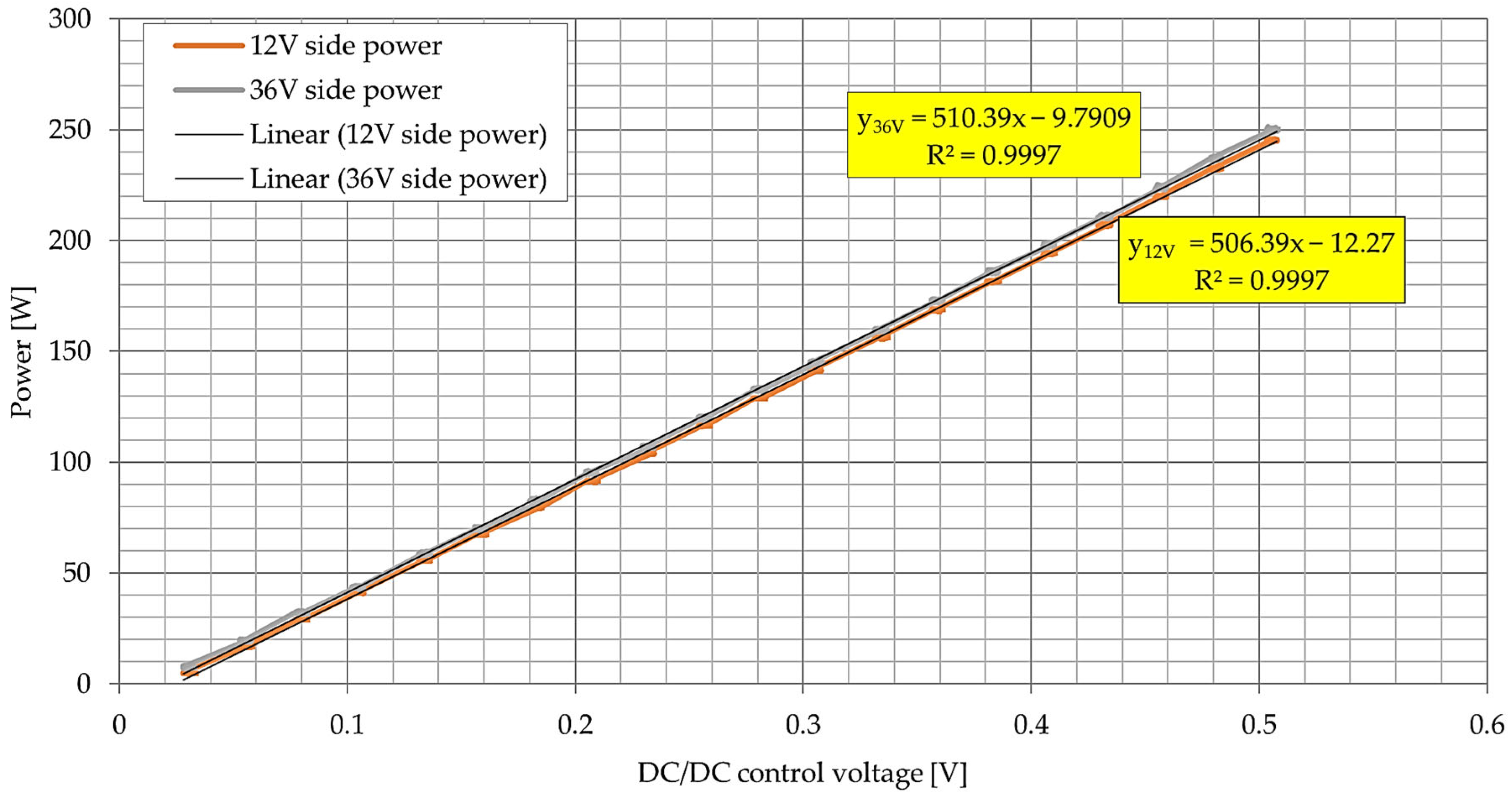
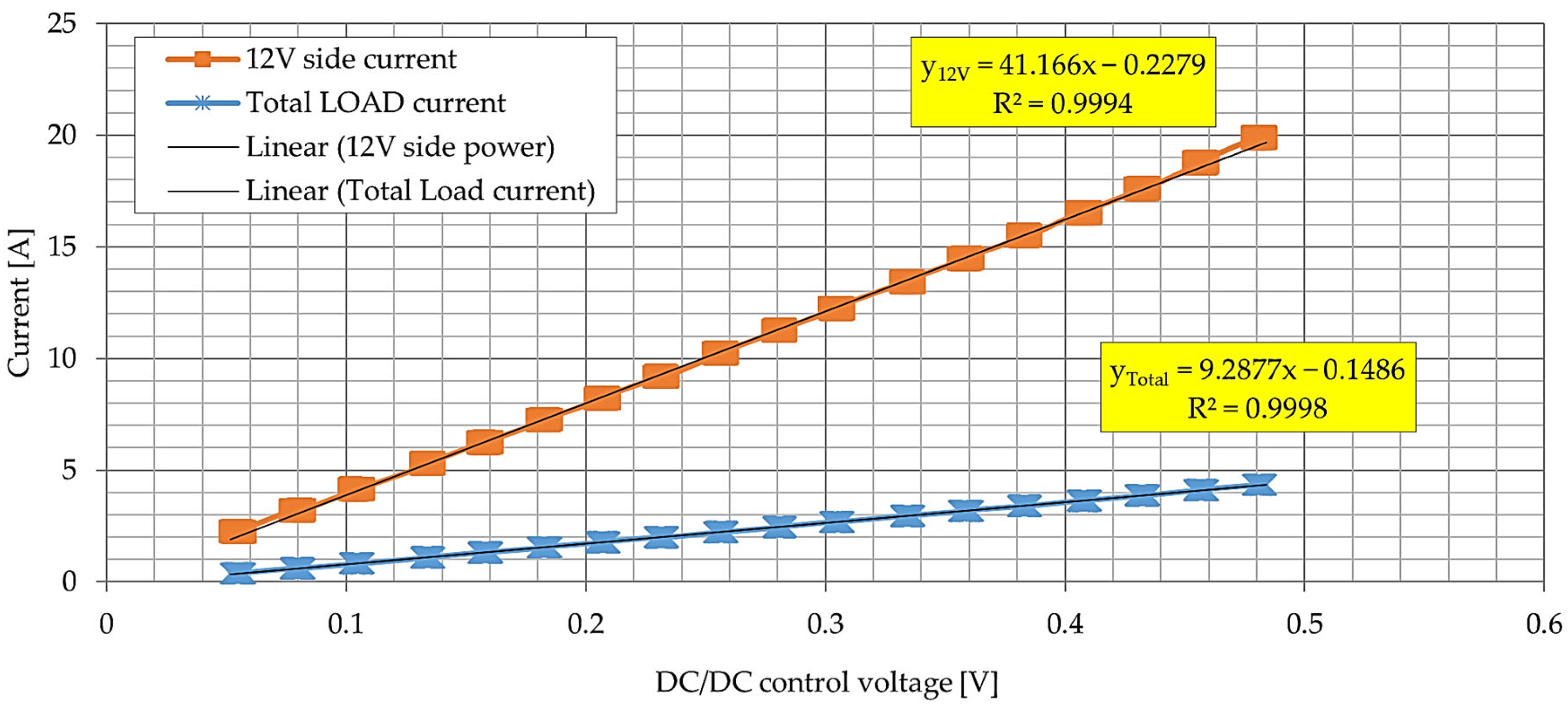
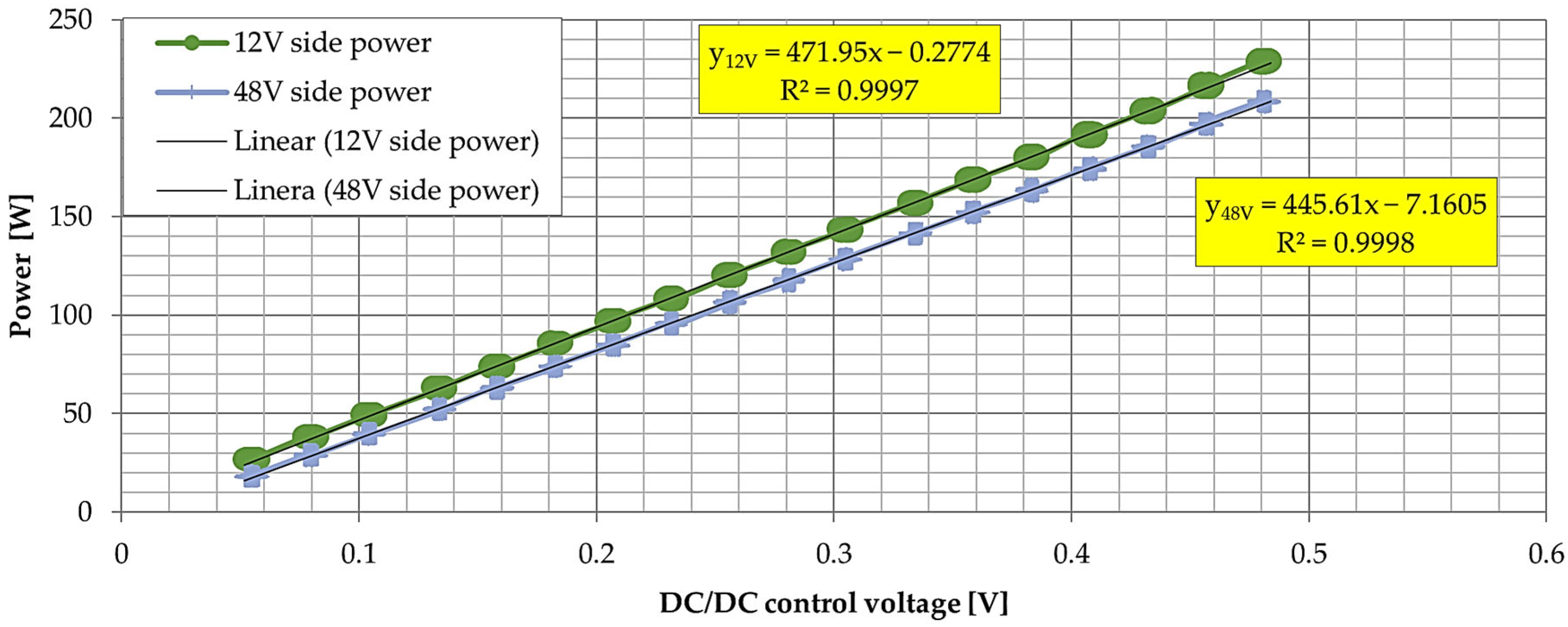
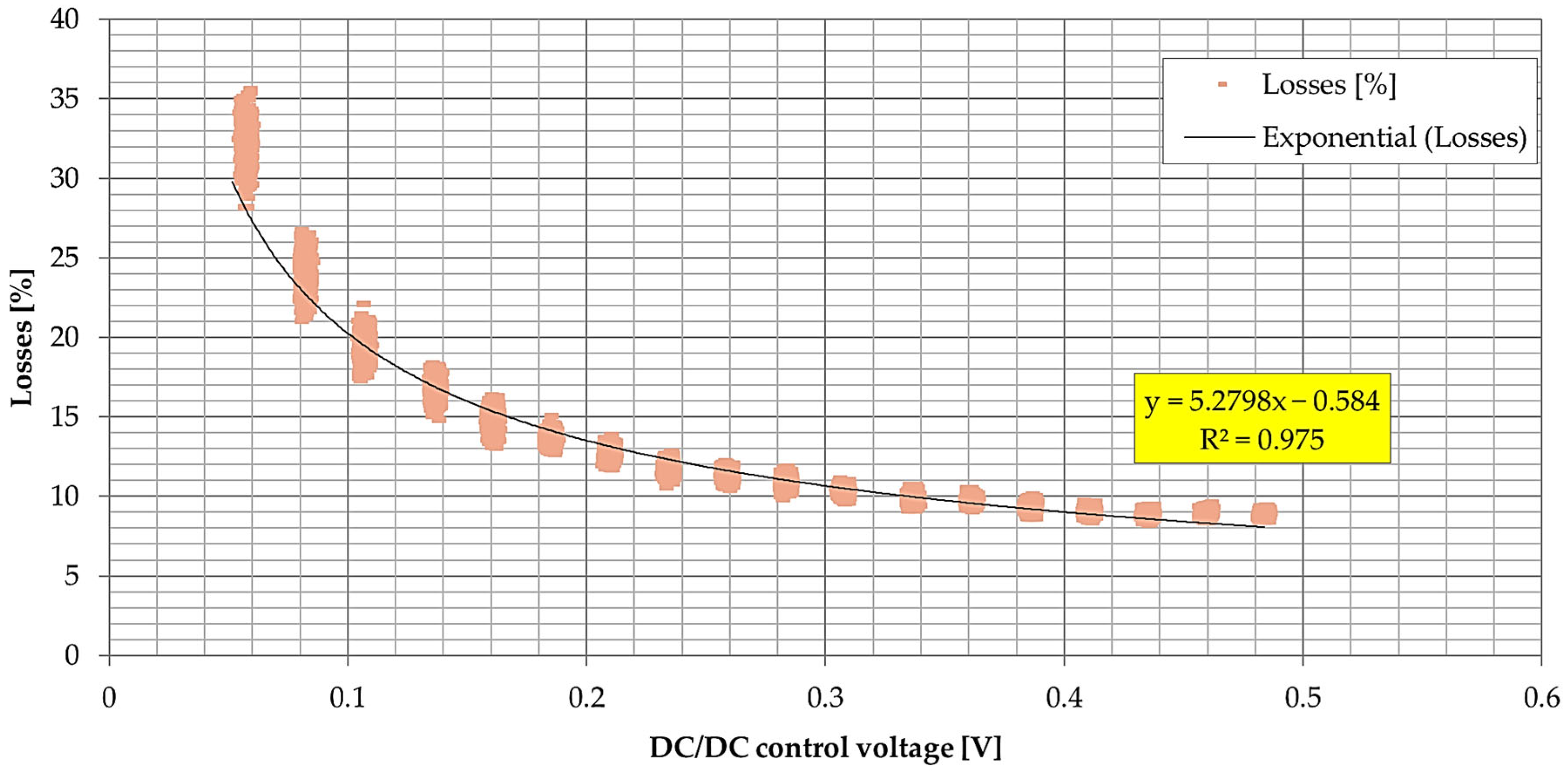
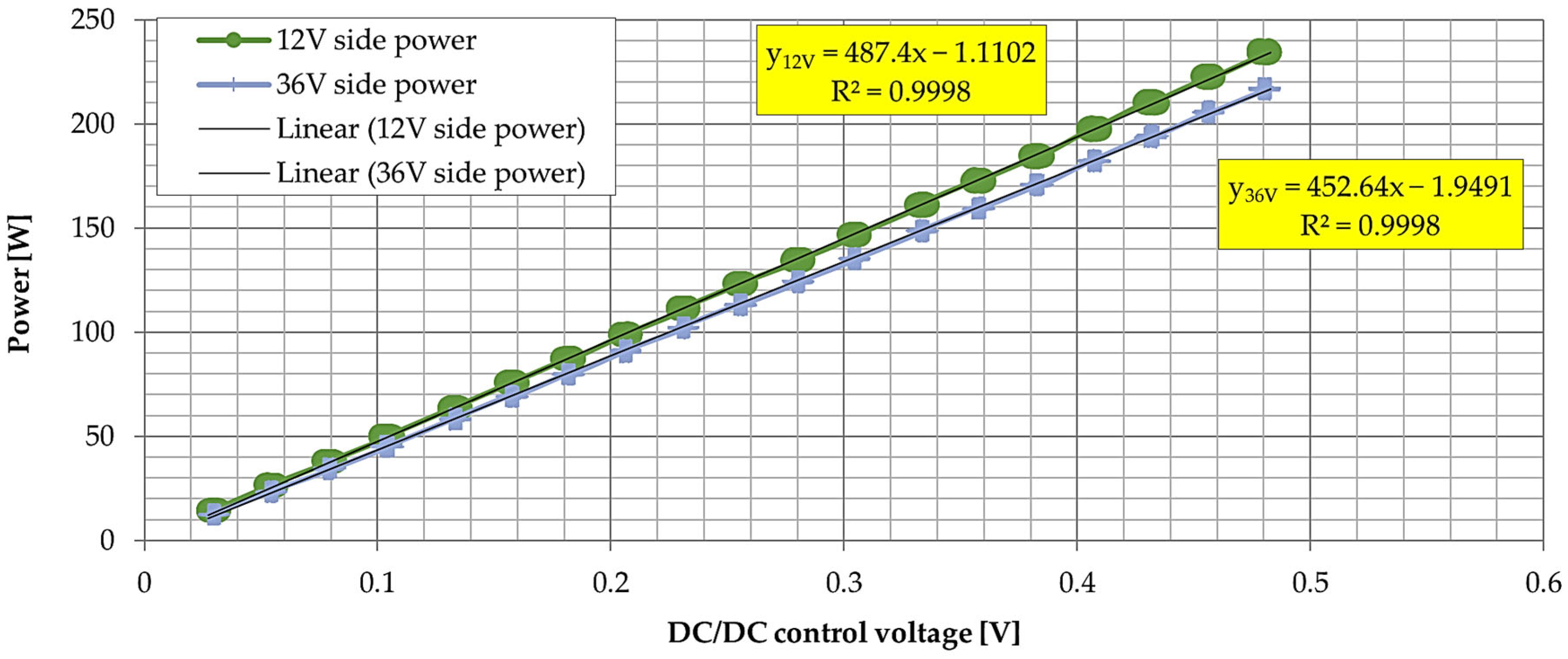
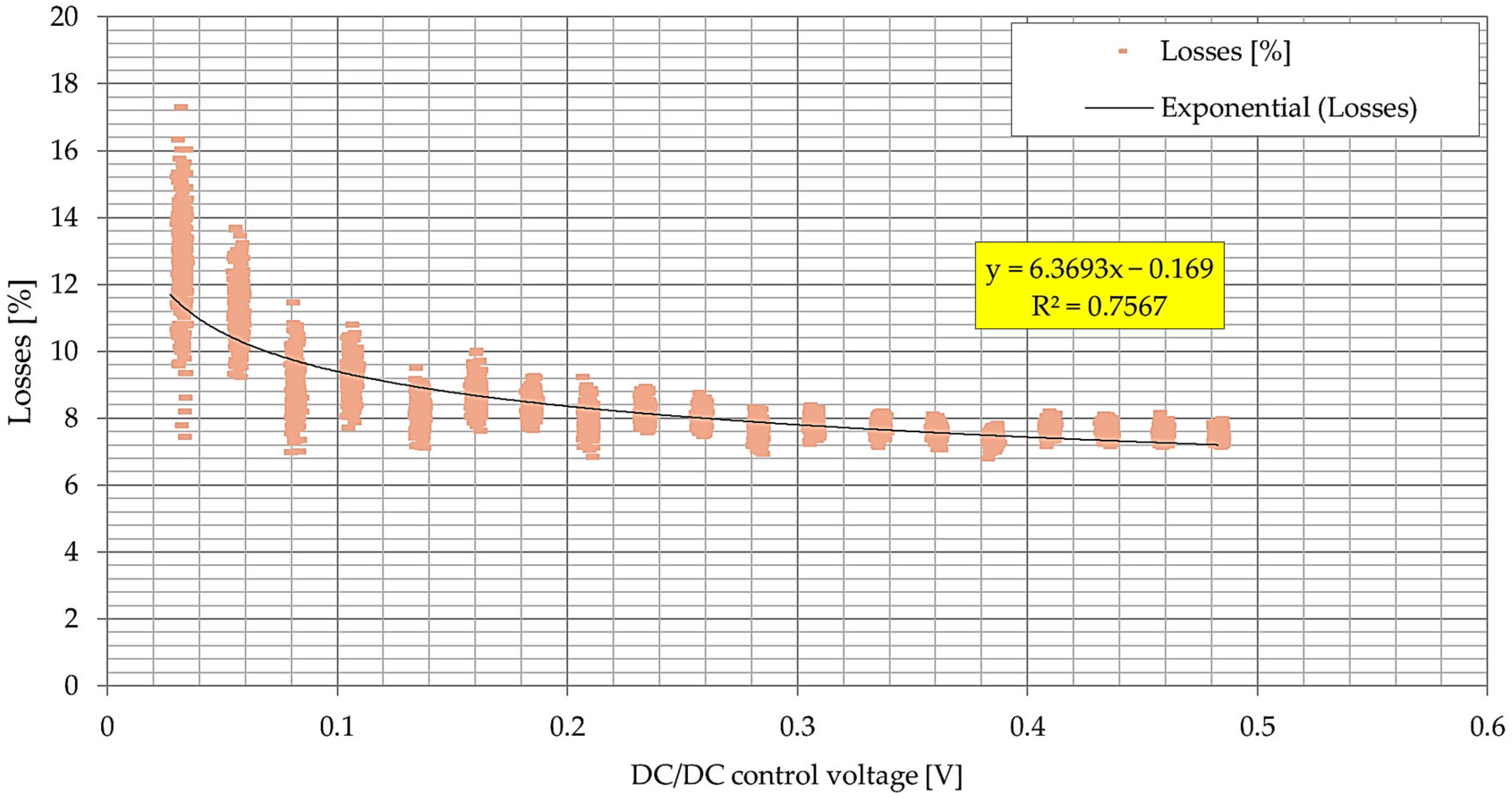
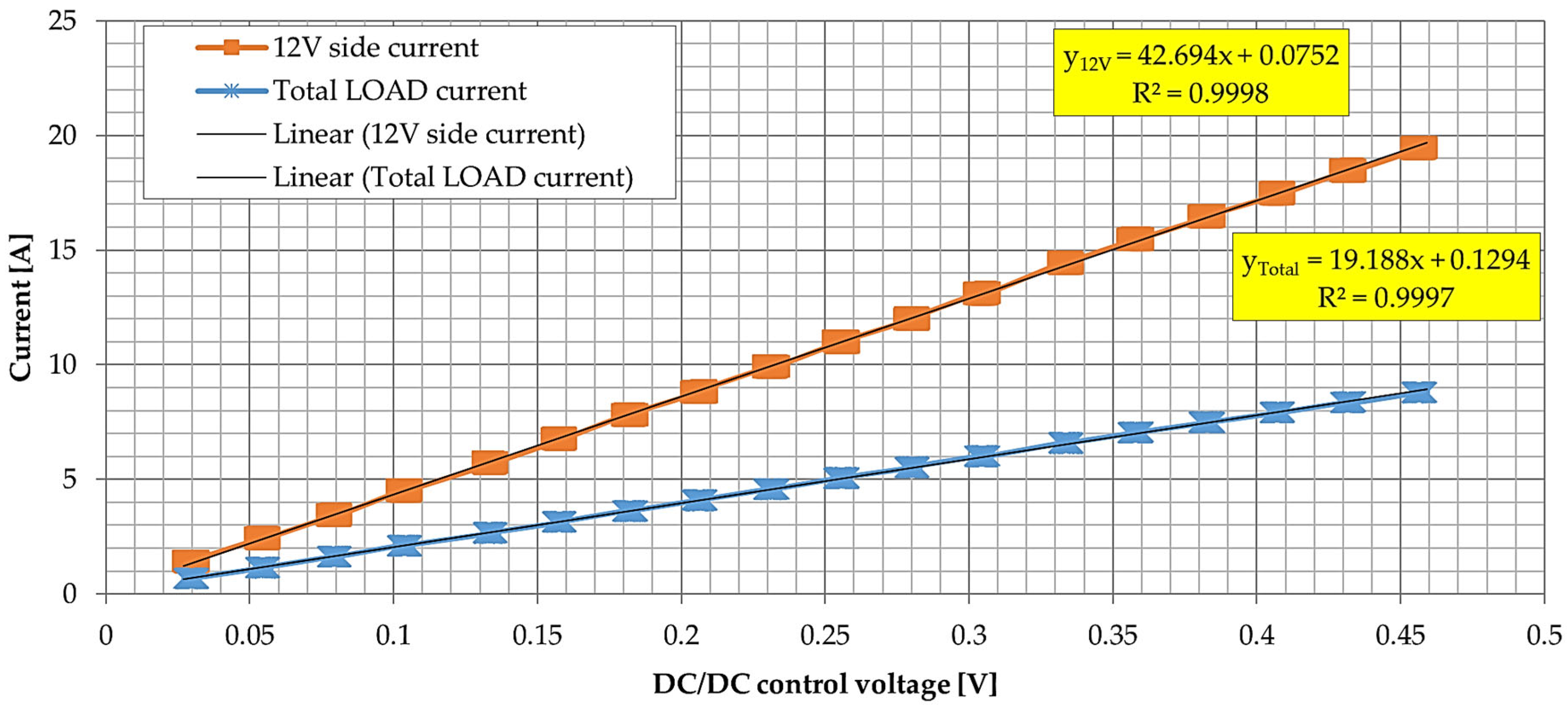
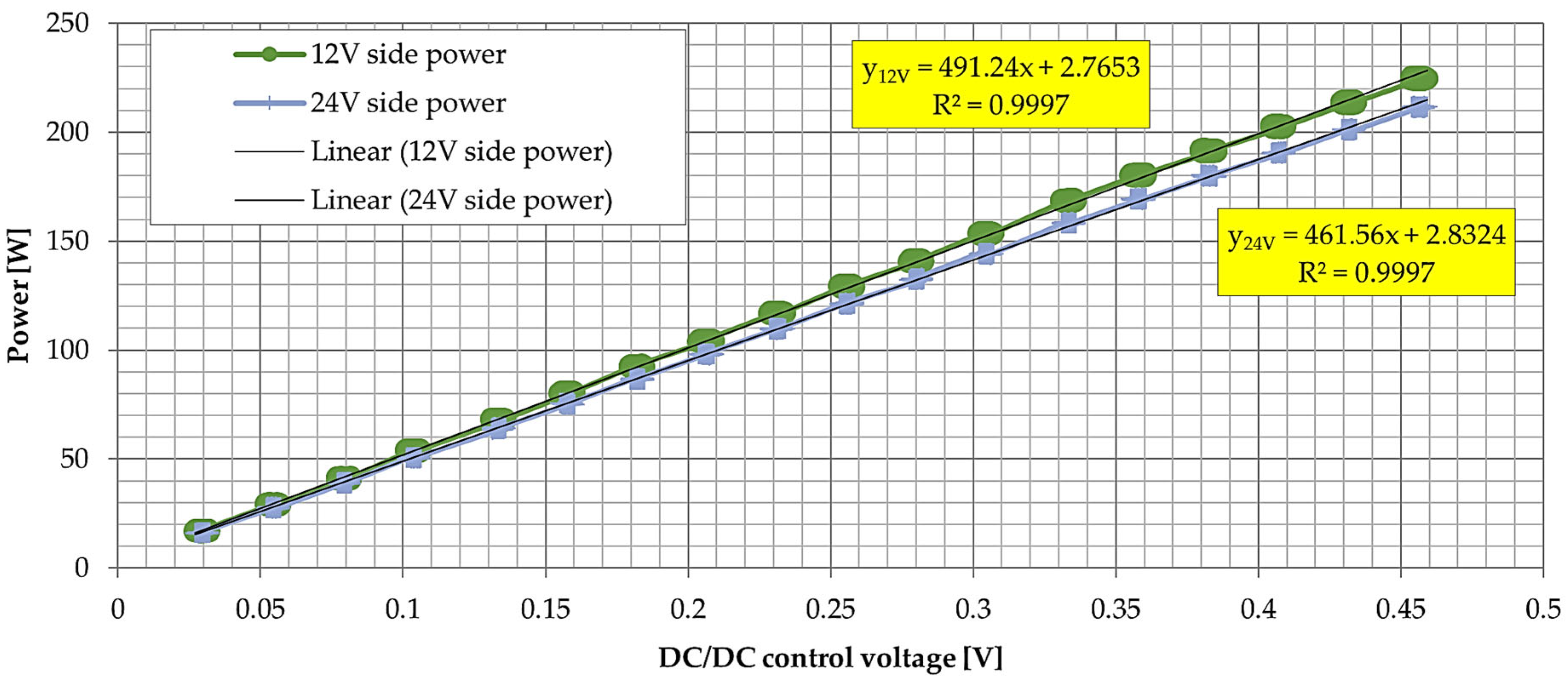
2.2.1. Step Down Measurements (Buck Mode)
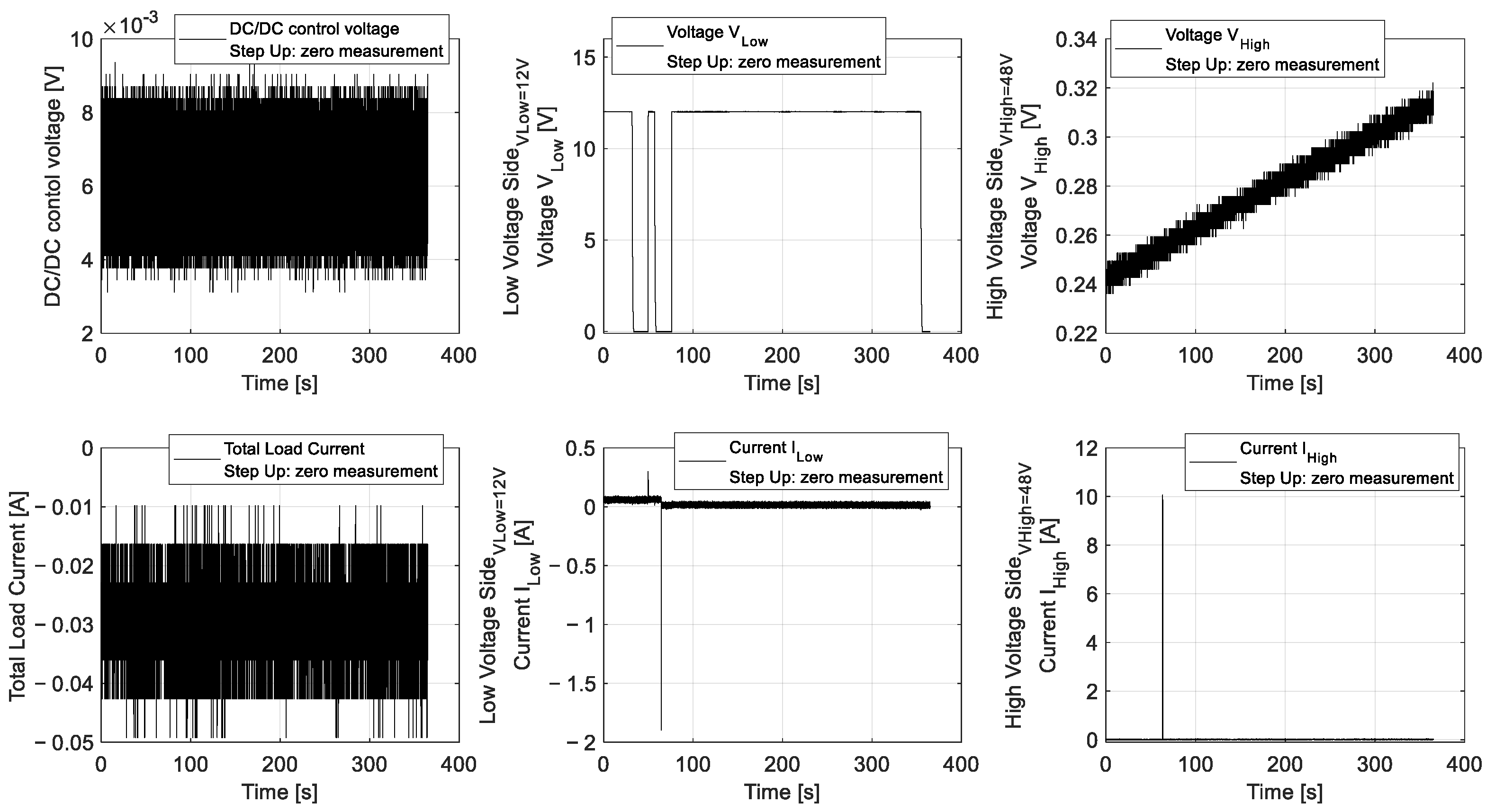
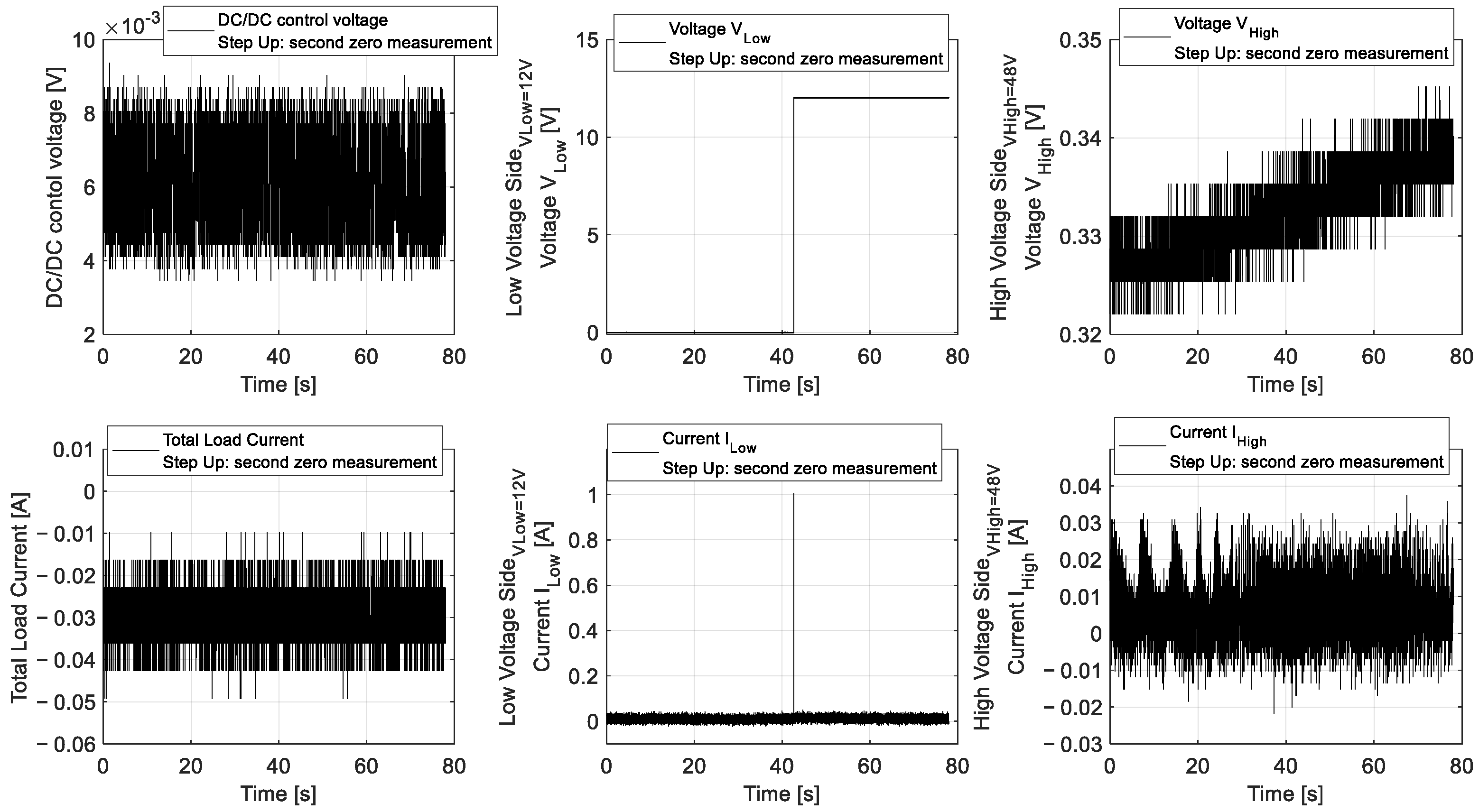
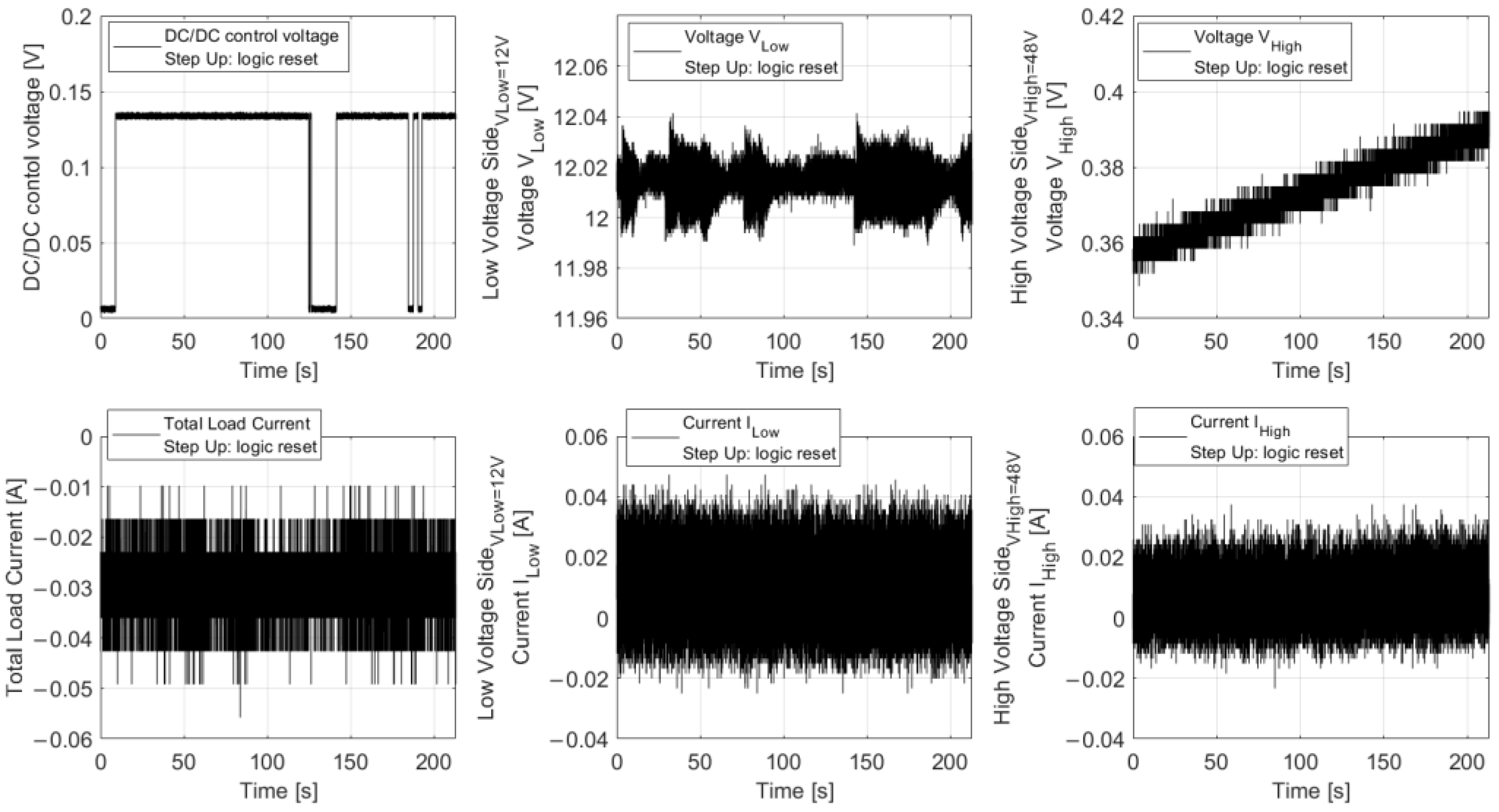
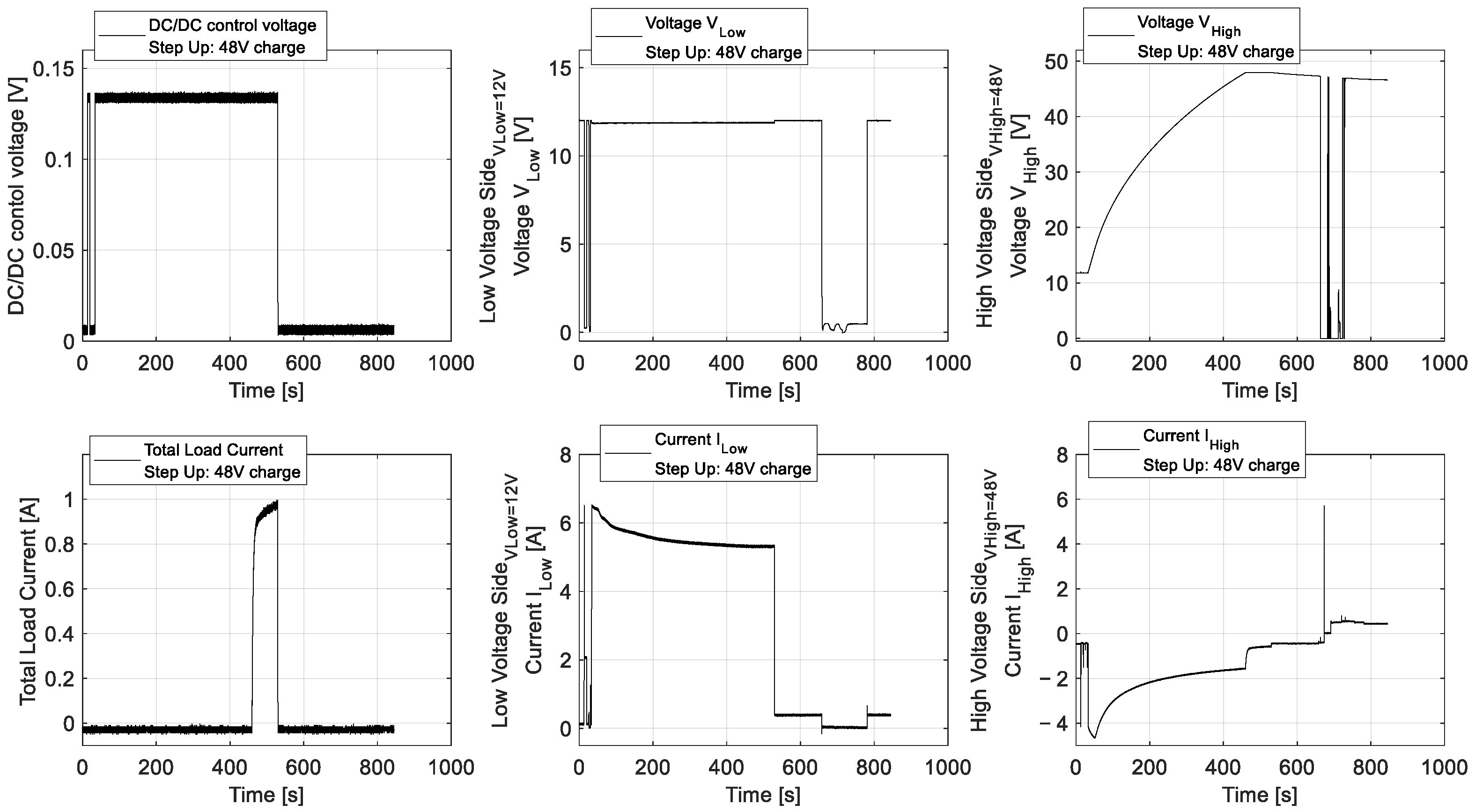
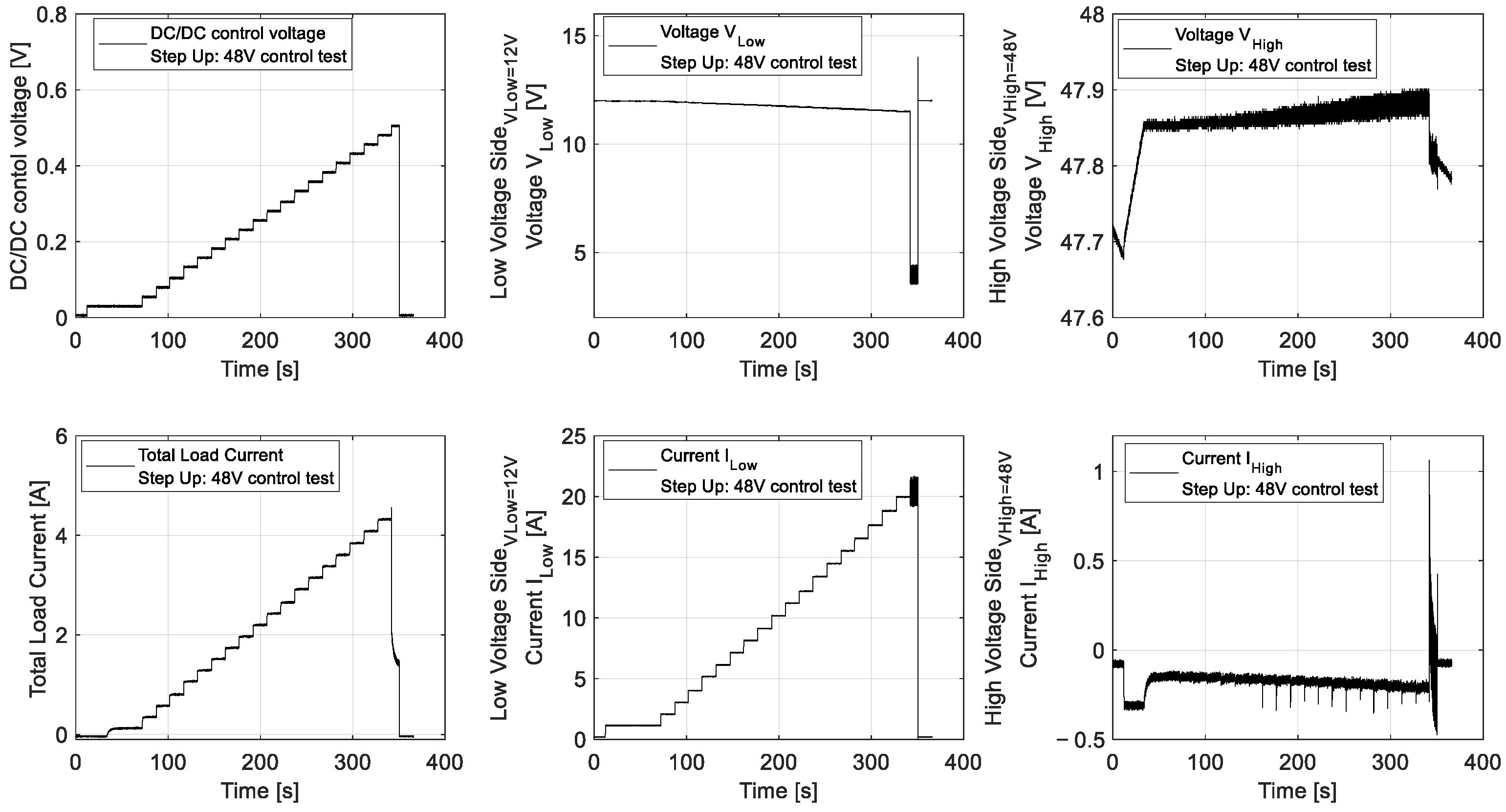
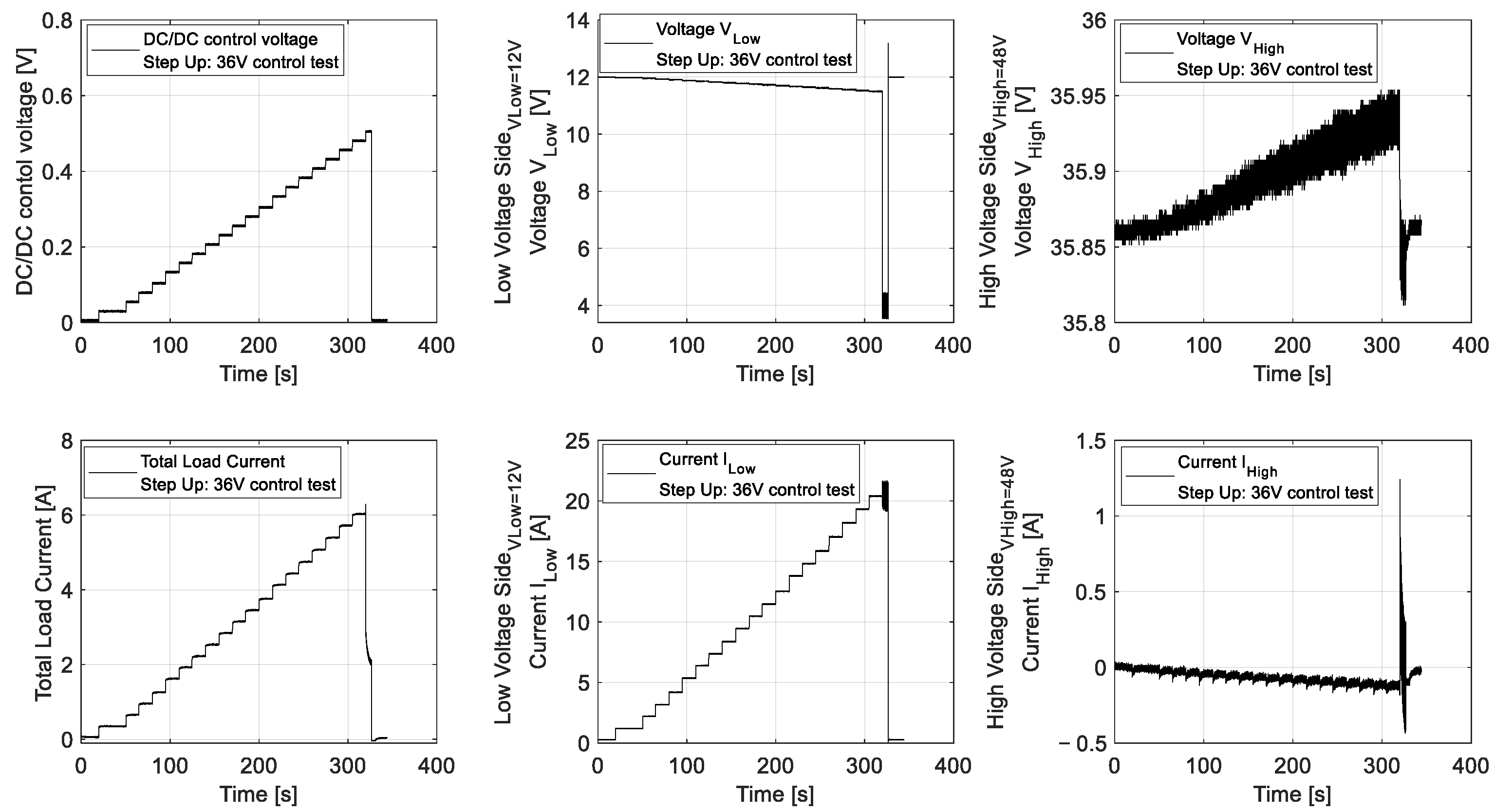
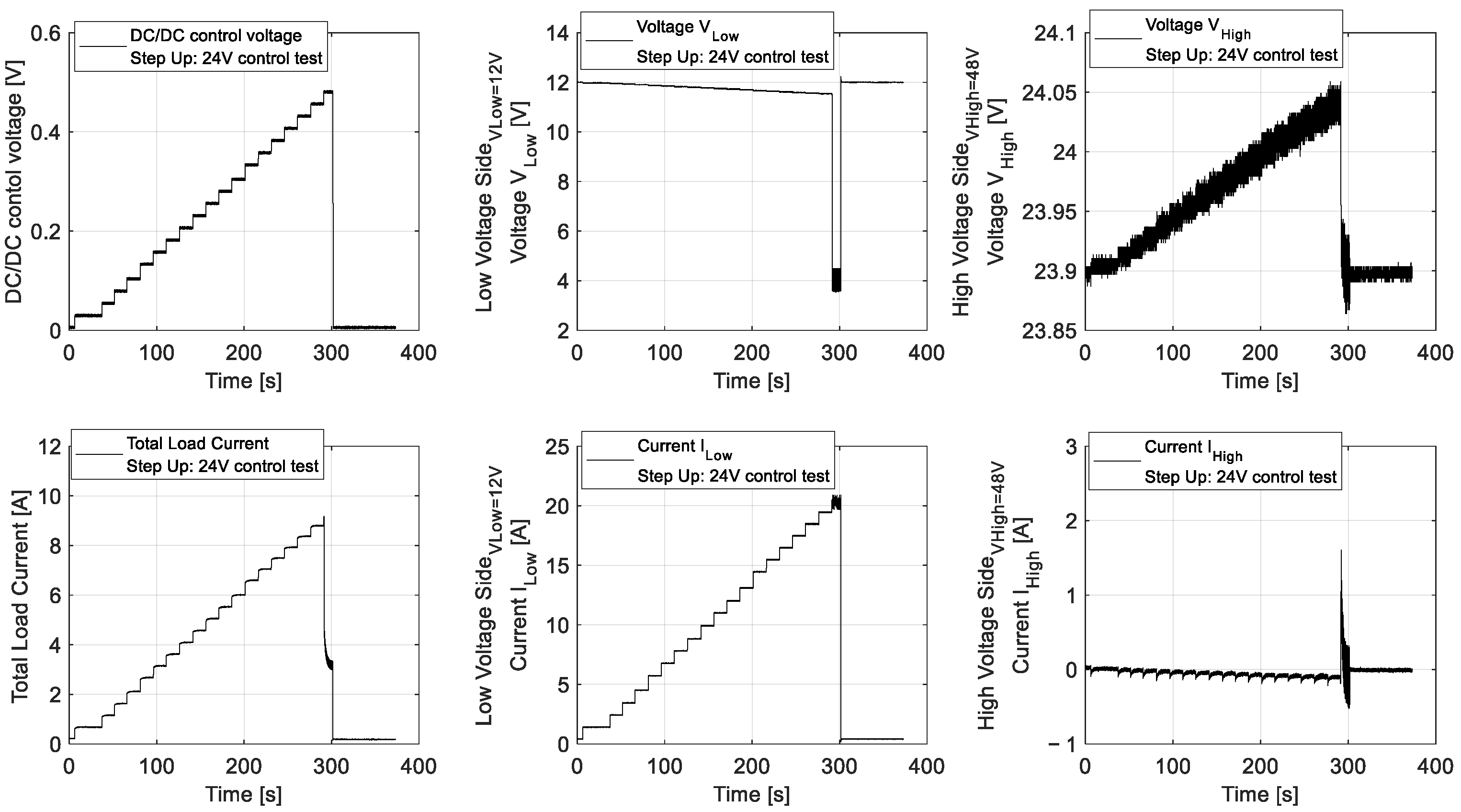
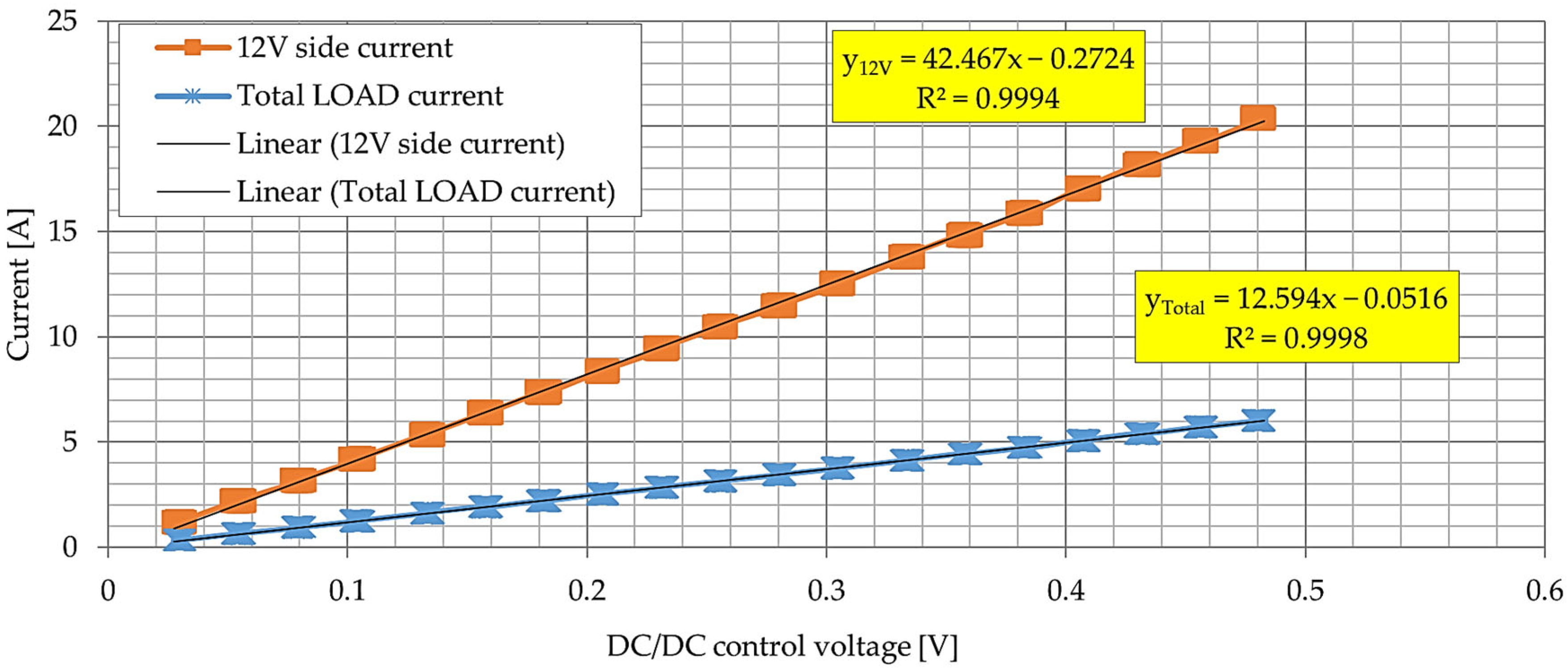
2.2.2. Step Up Measurements (Boost Mode)
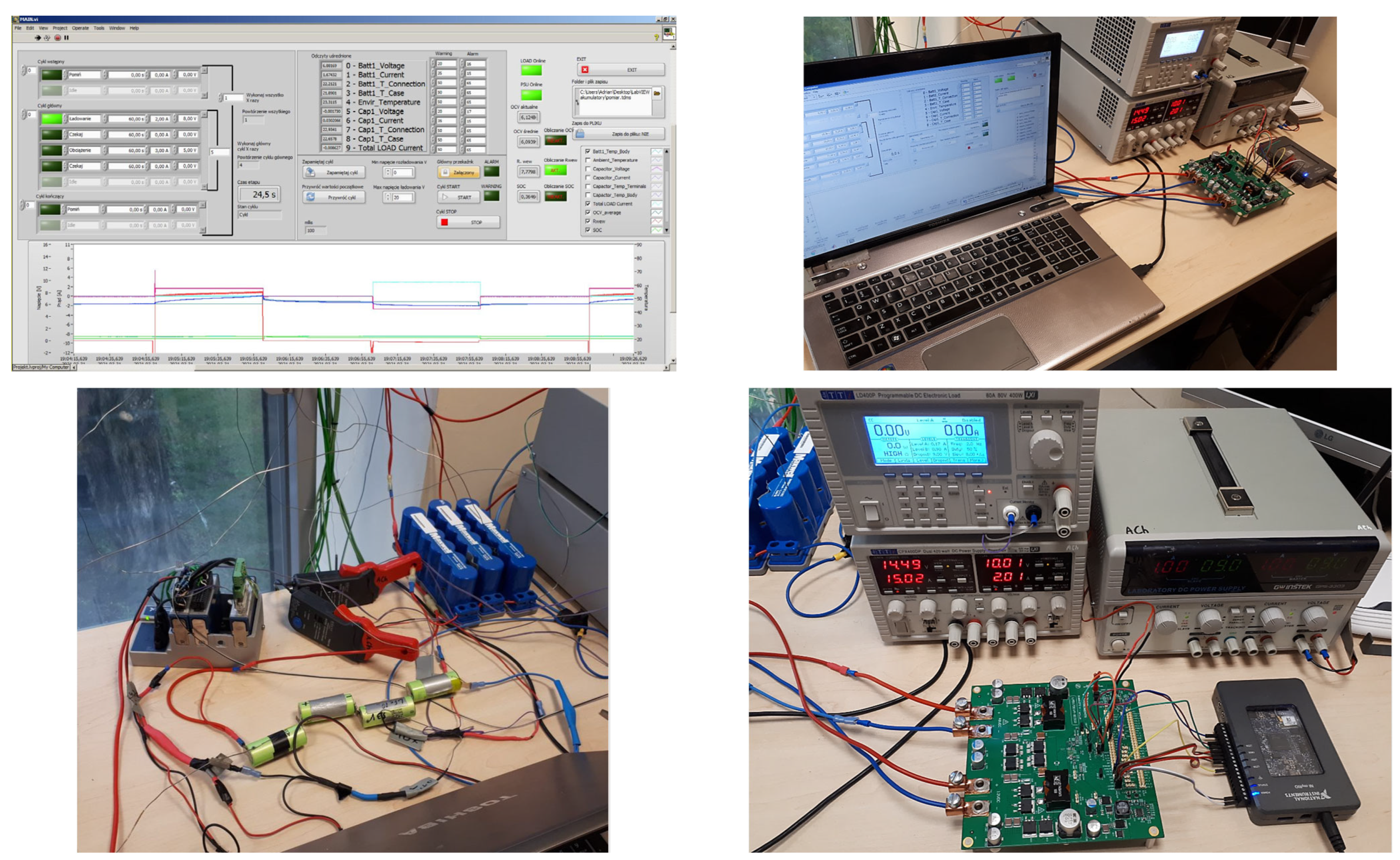
2.3. Test Bench
3. Results
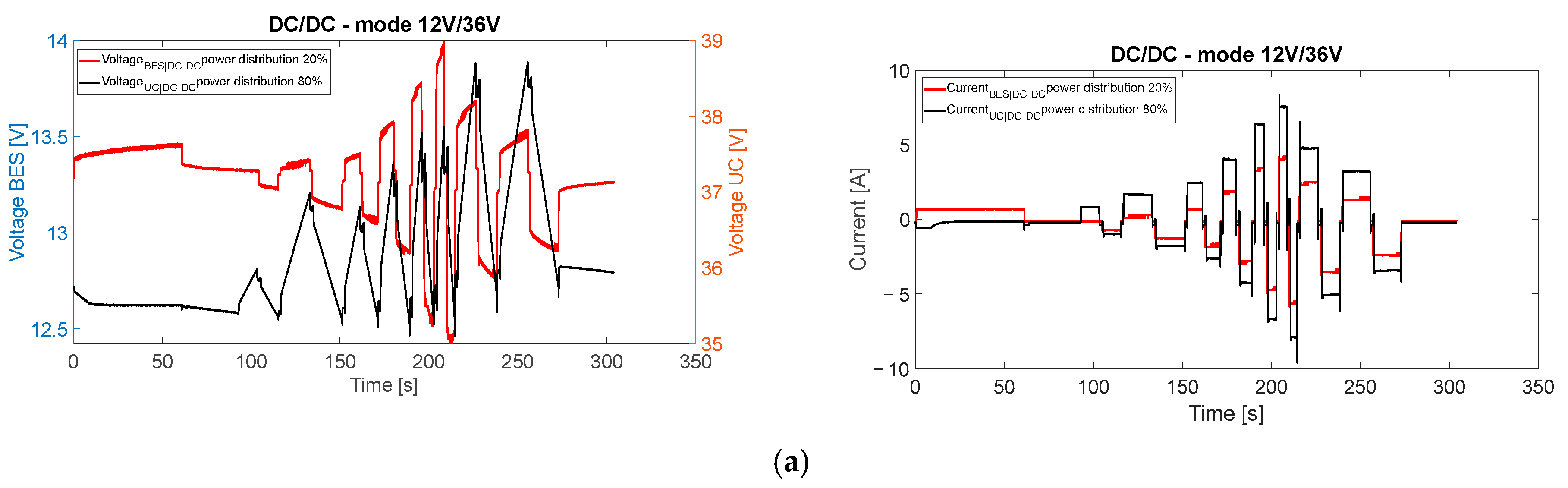
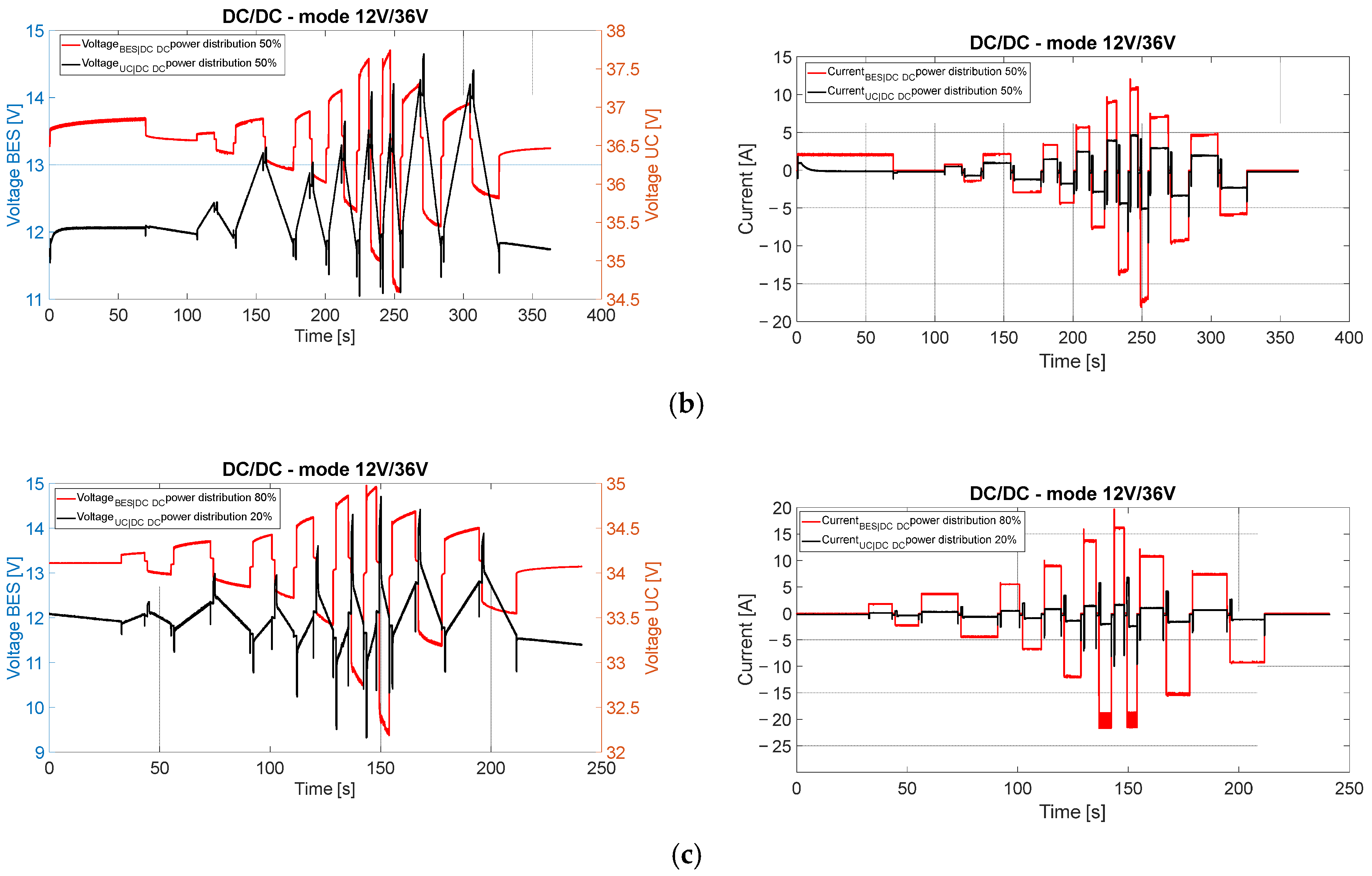
3.1. Experimental Research of Battery–Ultracapacitor System in a Semi-Active Topology with a DC/DC Converter
3.2. Results Regarding Current Values in Future Research
4. Conclusions
4.1. Conclusions from the Calibration of the DC/DC Converter
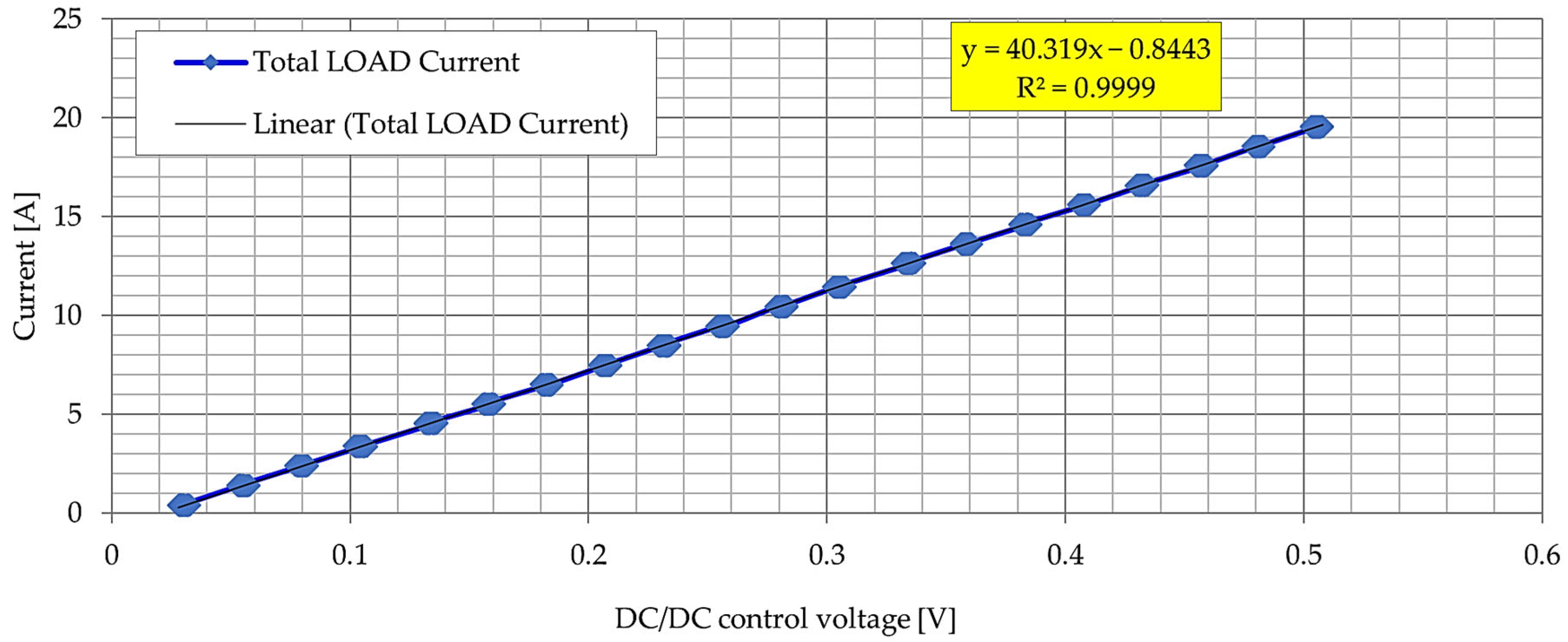
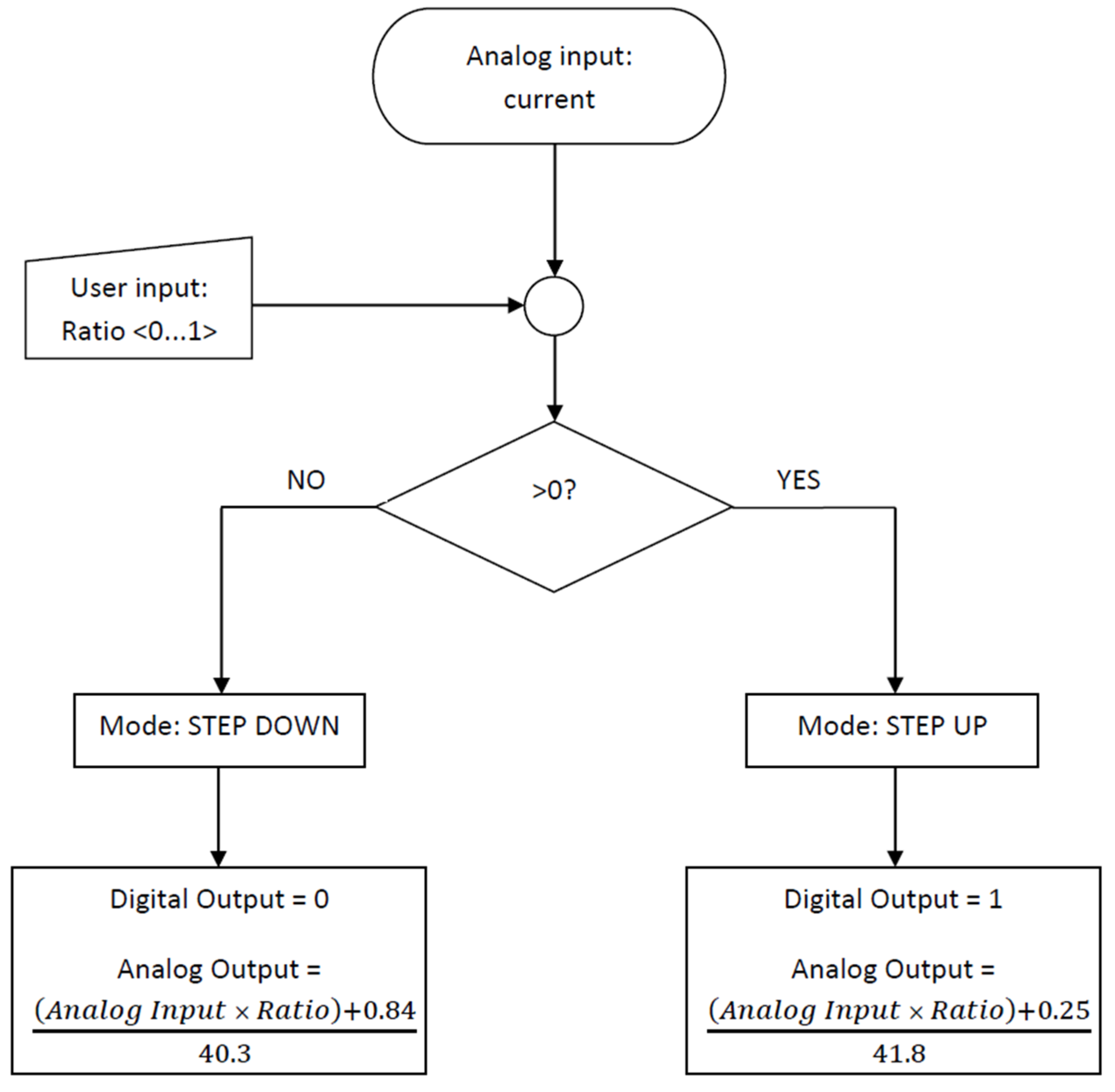
- In the Step Down operating mode, the control voltage of the converter translates directly into the value of the current transferred to the low-voltage side. The value of the voltage on the high-voltage side has no effect on the value of the current transferred to the low-voltage side.
- In the Step Up operating mode, the control voltage of the converter also translates directly into the current value on the low-voltage side (consumed current). The value of the voltage on the high-voltage side does not affect the value of the current drawn on the low-voltage side.
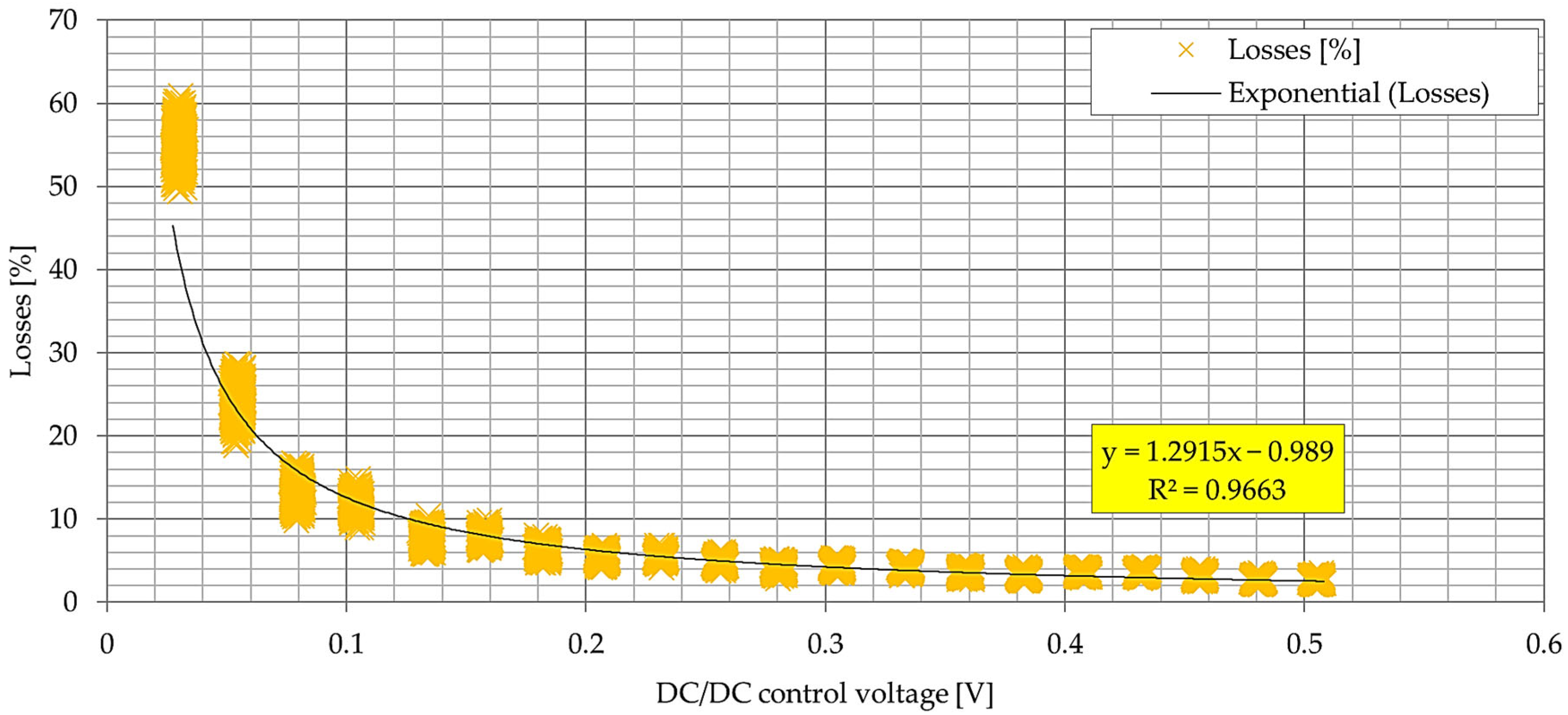
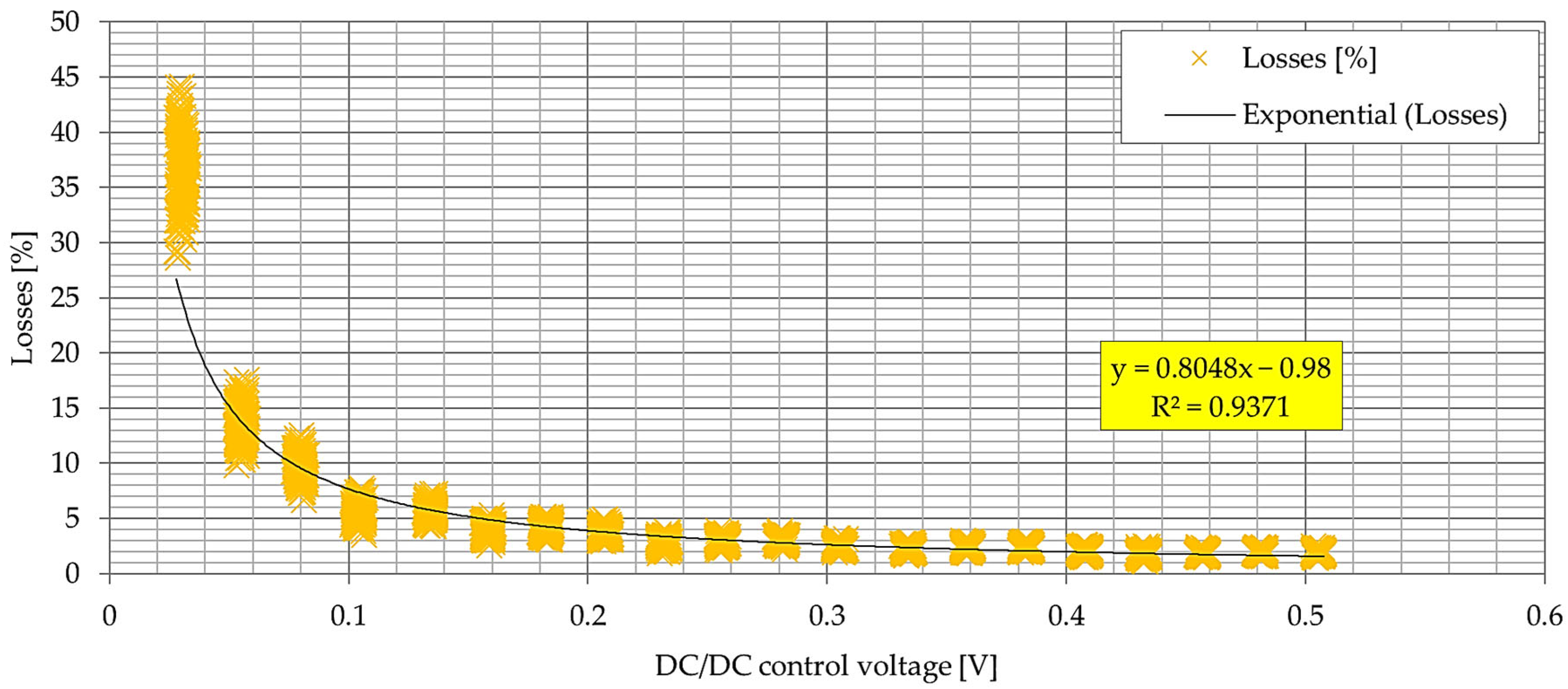
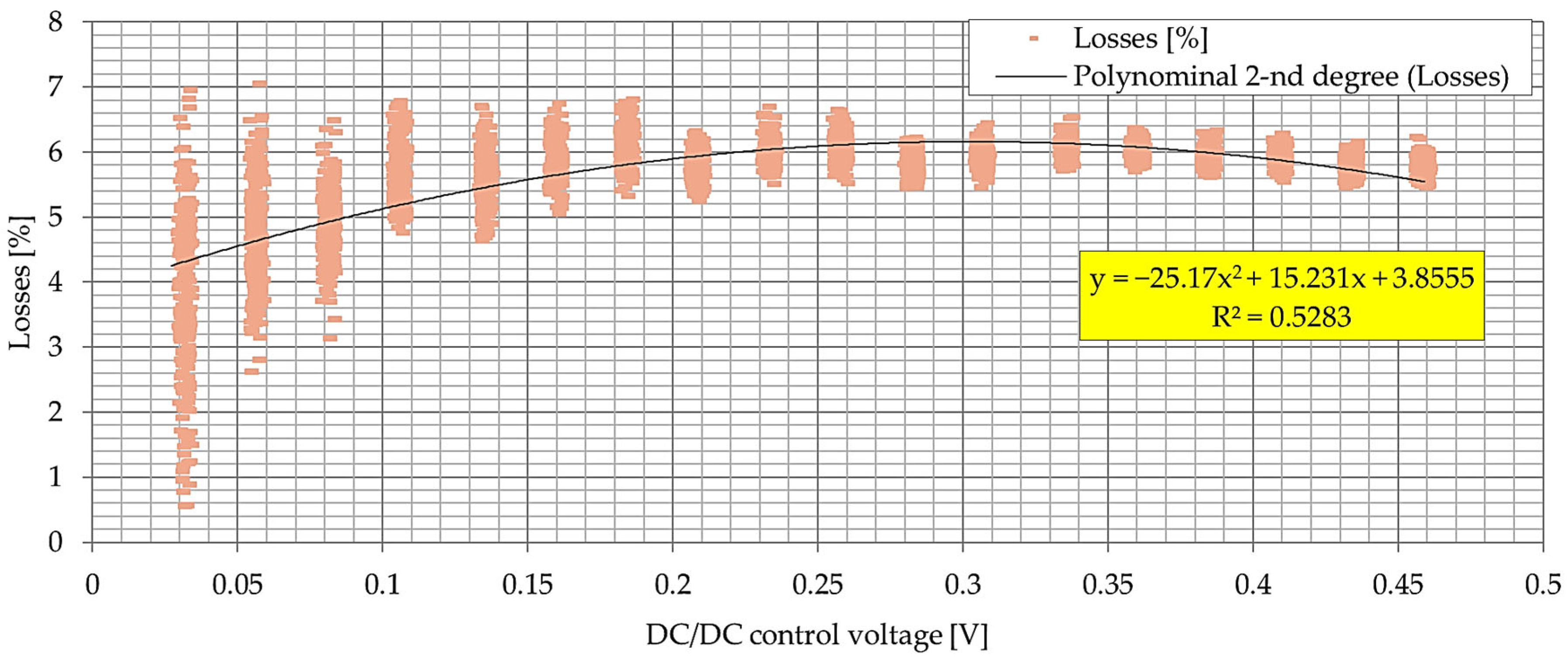
- Step Down losses decrease exponentially as the DC/DC converter set-up voltage increases. The value of losses slightly increases with the increase of the voltage difference between the sides of the converter.
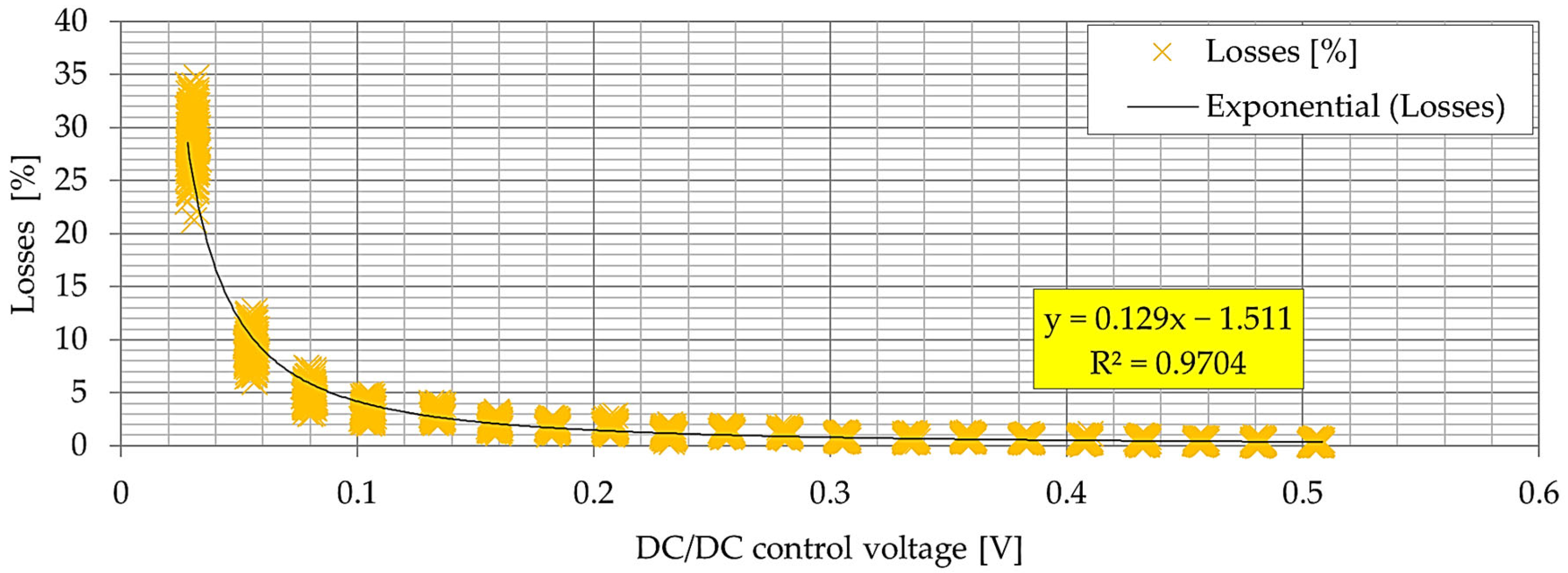
- Inverter losses in Step Up mode are more than twice as high as in Step Down mode.
- Idle power consumption is less than 0.5 A.
- Step Down mode—it is possible to start the converter when the voltage on the low-voltage side is zero; it is recommended that the voltage on the low-voltage side is not lower than 4 V.
- In Step Down mode, the voltage difference between the low and high-voltage sides must be at least 4 V.
- Step Up mode—it is not possible to start the system when the high side voltage is zero; a voltage equal to at least the low side voltage is required to start the system.
- The current consumption of the converter in the idle state, both from the low- and high-voltage side, was observed to be as low as 0.5 A. In the case of energy storage measurements in relaxation, it is recommended to completely disconnect the converter from the circuit.
4.2. Conclusions from the Experimental Research of Battery–Ultracapacitor System in a Semi-Active Topology with a DC/DC Converter
- Higher volumetric power density of the HES in comparison to the battery component only.
- Possibility of smooth power distribution from 0% to 100% between the battery and the ultracapacitor.
- Increasing the range of energy use (possible supply of energy to the system when the battery is completely discharged, the only limitation is the range of input/output voltages of the DC/DC converter).
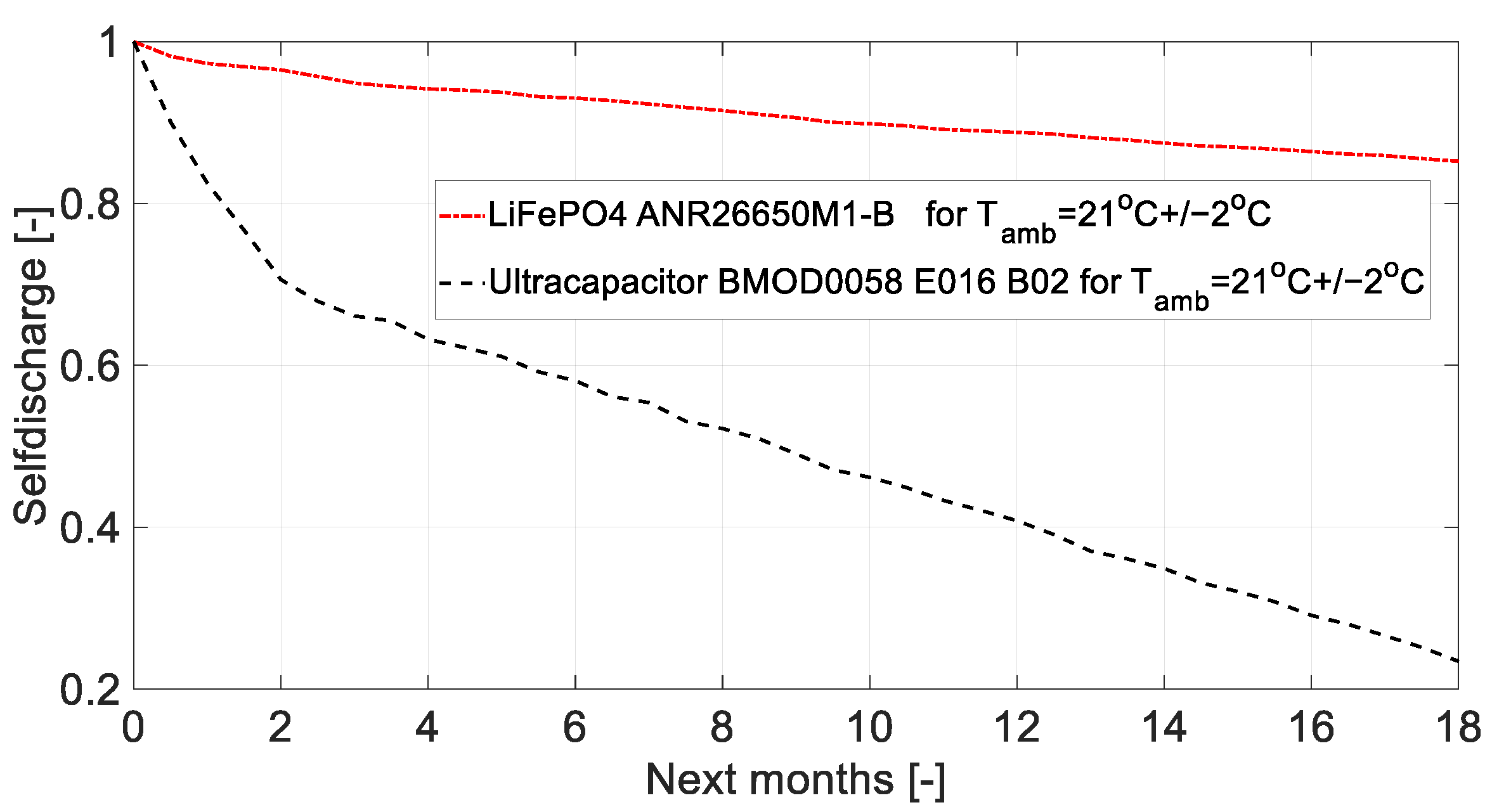
- Reduction of ultracapacitor self-discharge (the rate of self-discharge is about 80% per year [50]). For batteries, self-discharge does not exceed 30% per year [31]. The self-discharge value for the battery and ultracapacitor considered in this paper is presented below, in Figure 47. Self-discharge measurements were performed twice a month for 18 consecutive months.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The European Green Deal COM(2019) 640 Final—European Commision. Available online: https://eur-lex.europa.eu/resource.html?uri=cellar:b828d165-1c22-11ea-8c1f-01aa75ed71a1.0002.02/DOC_1&format=PDF (accessed on 28 March 2023).
- ChaoJi 3.0 Standard. Available online: https://www.vector.com/int/en/know-how/protocols/gbt-27930/#c204146 (accessed on 26 March 2023).
- White Paper of ChaoJi EV Charging Technology. In State Grid Corporation of China China Electricity Council Jointly Released June 2020; China Electricity Council: Beijiing, China, 2020.
- IEC 61851-23:2014; Electric Vehicle Conductive Charging System—Part 23: DC Electric Vehicle Charging Station. International Electrotechnical Commission: Geneva, Switzerland, 1906.
- Transport GHG Emission in EU. Available online: https://www.consilium.europa.eu/en/infographics/fit-for-55-afir-alternative-fuels-infrastructure-regulation/ (accessed on 25 March 2023).
- Directive (EU) 2018/2001 of the European Parliament and of the Council of 11 December 2018 on the Promotion of the Use of Energy from Renewable Sources. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32018L2001&from=EN (accessed on 24 March 2023).
- Revision of the Renewable Energy Directive: Fit for 55 Package. Available online: https://www.europarl.europa.eu/RegData/etudes/BRIE/2021/698781/EPRS_BRI(2021)698781_EN.pdf (accessed on 24 March 2023).
- Chmielewski, A.; Gumiński, R.; Mączak, J.; Radkowski, S.; Szulim, P. Aspects of balanced development of RES and distributed micro-cogeneration use in Poland: Case study of mCHP with Stirling engine. Renew. Sustain. Energy Rev. 2016, 60, 930–952. [Google Scholar] [CrossRef]
- Regulation of the European Parliament and of the Council on the Deployment of Alternative Fuels Infrastructure, and Repealing Directive 2014/94/EU of the European Parliament and of the Council. Available online: https://eur-lex.europa.eu/resource.html?uri=cellar:dbb134db-e575-11eb-a1a5-01aa75ed71a1.0001.02/DOC_1&format=PDF (accessed on 24 March 2023).
- Wasim, M.S.; Habib, S.; Amjad, M.; Bhatti, A.R.; Ahmed, E.M.; Qureshi, M.A. Battery-Ultracapacitor Hybrid Energy Storage System to Increase Battery Life Under Pulse Loads. IEEE Access 2022, 10, 62173–62182. [Google Scholar] [CrossRef]
- Jankowska, E.; Kopciuch, K.; Błażejczyk, M.; Majchrzycki, W.; Piórkowski, P.; Chmielewski, A.; Bogdziński, K. Hybrid energy storage based on ultracapacitor and lead acid battery: Case study. In Automation 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 743, pp. 339–349. [Google Scholar]
- Piórkowski, P.; Chmielewski, A.; Bogdziński, K.; Możaryn, J.; Mydłowski, T. Research on Ultracapacitors in Hybrid systems: Case Study. Energies 2018, 11, 2551. [Google Scholar] [CrossRef]
- Chariot, Electric Buses. Available online: https://chariot-electricbus.com/cmproduct/battery-electric-buses/ (accessed on 24 March 2023).
- Chariot, Ultracapacitor E-Bus. Available online: https://chariot-electricbus.com/cmproduct/12m-ultracapacitor-chariot-e-bus/ (accessed on 24 March 2023).
- Lee, S.; Kim, J. Power capability analysis of lithium battery and supercapacitor by pulse duration. Electronics 2019, 8, 1395. [Google Scholar] [CrossRef]
- Podder, A.K.; Chakraborty, O.; Islam, S.; Kumar, N.M.; Alhelou, A.H.H. Control Strategies of Different Hybrid Energy Storage Systems for Electric Vehicles Applications. IEEE Access 2021, 9, 51865–51895. [Google Scholar] [CrossRef]
- Hu, S.; Liang, Z.; He, X. Ultracapacitor-battery hybrid energy storage system based on the asymmetric bidirectional Z-source topology for EV. Trans. Power Electron. 2016, 11, 7489–7498. [Google Scholar] [CrossRef]
- Wang, J.; Wang, B.; Zhang, L.; Wang, J.; Shchurov, N.I.; Malozyomov, B.V. Review of bidirectional DC–DC converter topologies for hybrid energy storage system of new energy vehicles. Green Energy Intell. Transp. 2022, 1, 100010. [Google Scholar] [CrossRef]
- Yuhimenko, V.; Lerman, C.; Kuperman, A. DC active power filter-based hybrid energy source for pulsed power loads. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1001–1010. [Google Scholar] [CrossRef]
- Demircalı, A.P.; Sergeant, S.; Koroglu, K.S.; Oztürk, E.; Tumbek, M. Influence of the temperature on energy management in battery–ultracapacitor electric vehicles. J. Clean. Prod. 2018, 176, 716–725. [Google Scholar] [CrossRef]
- Hung, N.B.; Jaewon, S.; Lim, O. A study of the effects of input parameters on the dynamics and required power of an electric bicycle. Appl. Energy 2017, 204, 1347–1362. [Google Scholar] [CrossRef]
- Akar, F.; Tavlasoglu, Y.; Vural, B. An Energy Management Strategy for a Concept Battery/Ultracapacitor Electric Vehicle With Improved Battery Life. IEEE Trans. Transp. Electrif. 2017, 3, 191–200. [Google Scholar] [CrossRef]
- Kollmeyer, P.K.; Jahns, T.M. Aging and performance comparison of absorbed glass matte, enhanced flooded, PbC, NiZn, and LiFePO4 12V start stop vehicle batteries. J. Power Sources 2019, 441, 227139. [Google Scholar] [CrossRef]
- Esfandyaria, A.B.; Nortona, M.; Conlona, M.C.; Cormack, S.J. Performance of a campus photovoltaic electric vehicle charging station in a temperate climate. Sol. Energy 2019, 177, 762–771. [Google Scholar] [CrossRef]
- Hu, J.S.; Lu, F.; Zhu, C.; Cheng, C.Y.; Chen, S.L.; Ren, T.J.; Mi, C.C. Hybrid Energy Storage System of an Electric Scooter Based on Wireless Power Transfer. IEEE Trans. Ind. Inform. 2018, 8, 4169–4178. [Google Scholar] [CrossRef]
- Park, J.; Appiah, W.A.; Byun, S.; Jin, D.; Ryou, M.H.; Lee, Y.M. Semi-empirical long-term cycle life model coupled with an electrolyte depletion function for large-format graphite/LiFePO4 lithium-ion batteries. J. Power Sources 2017, 365, 257–265. [Google Scholar] [CrossRef]
- Pattipati, B.; Balasingam, B.; Avvari, G.V.; Pattipati, K.R.; Bar-Shalom, Y. Open circuit voltage characterization of lithium–ion batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Chmielewski, A.; Bogdziński, K.; Gumiński, R.; Szulim, P.; Piórkowski, P.; Możaryn, J.; Mączak, J. Operational research of VRLA battery. Advances in Intelligent Systems and Computing. In Automation 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 743, pp. 783–791. [Google Scholar]
- Czerwiński, A. Akumulatory, Baterie, Ogniwa; Wyd. WKŁ: Warszawa, Poland, 2012. [Google Scholar]
- Sarasketa-Zabala, E.; Gandiaga, I.; Martinez-Laserna, E.; Rodriguez-Martinez, L.M.; Villarreal, I. Cycle ageing analysis of a LiFePO4/graphite cell with dynamic model validations: Towards realistic lifetime predictions. J. Power Sources 2015, 275, 573–587. [Google Scholar] [CrossRef]
- Wang, J.; Gan, Y.; Yao, M.; Li, Y. Cycle-life model for graphite-LiFePO4 cells. J. Power Sources 2011, 196, 3942–3948. [Google Scholar] [CrossRef]
- Liang, J.; Gan, Y.; Yao, M.; Li, Y. Numerical analysis of capacity fading for a LiFePO4 battery under different current rates and ambient temperatures. Int. J. Heat Mass Transf. 2021, 165, 120615. [Google Scholar] [CrossRef]
- Li, J.; Adewuyi, K.; Lotfi, N.; Landers, R.G.; Park, J. A single particle model with chemical/mechanical degradation physics for lithium ion battery State of Health (SOH) estimation. Appl. Energy 2018, 212, 1178–1190. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W.; Lu, J.; Sun, F. Flexible battery state of health and state of charge estimation using partial charging data and deep learning. Energy Storage Mater. 2022, 51, 372–381. [Google Scholar] [CrossRef]
- Lu, J.; Xiong, R.; Tian, J.; Wang, C.; Hsu, C.W.; Tsou, N.T.; Sun, F.; Li, J. Battery degradation prediction against uncertain future conditions with recurrent neural network enabled deep learning. Energy Storage Mater. 2022, 50, 139–151. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W. State-of-Health Estimation Based on Differential Temperature for Lithium Ion Batteries. IEEE Trans. Power Electron. 2020, 35, 10363–10373. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Lu, J.; Chen, C.; Shen, W. Battery state-of-charge estimation amid dynamic usage with physics-informed deep learning. Energy Storage Mater. 2022, 50, 718–729. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; Ma, S.; Lin, X. Characterization of external short circuit faults in electric vehicle Li-ion battery packs and prediction using artificial neural networks. Appl. Energy 2020, 260, 114253. [Google Scholar] [CrossRef]
- Wu, S.; Xiong, R.; Li, H.; Nian, V.; Ma, S. The state of the art on preheating lithium-ion batteries in cold weather. J. Energy Storage 2020, 27, 101059. [Google Scholar] [CrossRef]
- Chmielewski, A.; Piórkowski, P.; Bogdzinski, K.; Szulim, P.; Guminski, R. Test bench and model research of hybrid energy storage. J. Power Technol. 2017, 97, 406–415. [Google Scholar]
- Shen, J.; Khaligh, A. A supervisory energy management control strategy in a battery/ultracapacitor hybrid energy storage system. IEEE Trans. Transp. Electrif. 2015, 1, 223–231. [Google Scholar] [CrossRef]
- Kuperman, A.; Aharon, I.; Malki, S.; Kara, A. Design of a semiactive battery-ultracapacitor hybrid energy source. IEEE Trans. Power Electron. 2013, 28, 806–815. [Google Scholar] [CrossRef]
- Lin, X.; Zamora, R. Controls of hybrid energy storage systems in microgrids: Critical review, case study and future trends, Journal of Energy Storage. J. Energy Storage 2022, 47, 103884. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Shen, W.; Sun, F. State-of-charge estimation of lithium-ion battery using an improved neural network model and extended Kalman filter. J. Clean. Prod. 2019, 234, 1153–1164. [Google Scholar] [CrossRef]
- Mamun, A.A.; Liu, Z.; Rizzi, D.M.; Onori, S. An Integrated Design and Control Optimization Framework for Hybrid Military Vehicle Using Lithium-Ion Battery and Supercapacitor as Energy Storage Devices. IEEE Trans. Transp. Electrif. 2019, 5, 239–251. [Google Scholar] [CrossRef]
- Blasius, E.; Wang, Z. Effects of charging battery electric vehicles on local grid regarding standardized load profile in administration sector. Appl. Energy 2018, 224, 330–339. [Google Scholar] [CrossRef]
- Reddy, K.J.; Natarajan, S. Energy sources and multi-input DC-DC converters used in hybrid electric vehicle applications—A review. Int. J. Hydrog. Energy 2018, 43, 17387–17408. [Google Scholar] [CrossRef]
- The Act on Road Traffic in Poland. Available online: https://prawooruchudrogowym.pl/ (accessed on 12 February 2023). (In Polish).
- Kowal, J.; Avaroglu, E.; Chamekh, F.; Šenfelds, A.; Thien, T.; Wijaya, D.; Sauer, D.U. Detailed analysis of the self-discharge of supercapacitors. J. Power Sources 2011, 196, 573–579. [Google Scholar] [CrossRef]
- Hossain Lipu, M.S.; Hannan, M.A.; Hussain, A.; Hoque, M.M.; Pin, J.K.; Saad, M.H.M.; Ayob, A. A review of state of health and remaining useful life estimation methods for lithium–ion battery in electric vehicles: Challenges and recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Miluski, T. BMW Group Poland Training Course for Teachers of Technical Schools. BMW Electric Drive Systems. Generation 5.0″, 16 September 2022, Warsaw, Poland. Available online: https://aos.bmwgroup.com/web/oss/start (accessed on 28 February 2023).
- Chmielewski, A.; Szulim, P.; Gregorczyk, M.; Gumi’nski, R.; Mydłowski, T.; Maczak, J. Model of an electric vehicle powered by a PV cell—A case study. In Proceedings of the 2017 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 28–31 August 2017. [Google Scholar]
- Chen, H.; Sui, Y.; Shang, W.; Sun, R.; Chen, Z.; Wang, C.; Han, C.; Zhang, Y.; Zhang, H. Towards renewable public transport: Mining the performance of electric buses using solar-radiation as an auxiliary power source. Appl. Energy 2022, 325, 119863. [Google Scholar] [CrossRef]
- Argyrou, M.C.; Marouchos, C.C.; Kalogirou, S.A.; Christodoulides, P. A novel power management algorithm for a residential grid-connected PV system with battery-supercapacitor storage for increased self-consumption and self-sufficiency. Energy Convers. Manag. 2021, 246, 114671. [Google Scholar] [CrossRef]
- Sumsurooah, S.; He, Y.; Torchio, M.; Kouramas, K.; Guida, B.; Cuomo, F.; Atkin, J.; Bozhko, S.; Renzetti, A.; Russo, A.; et al. ENIGMA—A Centralised Supervisory Controller for Enhanced Onboard Electrical Energy Management with Model in the Loop Demonstration. Energies 2021, 14, 5518. [Google Scholar] [CrossRef]
- Cavallo, A.; Russo, A.; Canciello, G. Control of Supercapacitors for smooth EMA Operations in Aeronautical Applications. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4948–4954. [Google Scholar]
- Russo, A.; Cavallo, A. Stability and Control for Buck–Boost Converter for Aeronautic Power Management. Energies 2023, 16, 988. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Integrated supervised adaptive control for the more Electric Aircraft. Automatica 2020, 117, 108956. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Buck-Boost Converter Control for Constant Power Loads in Aeronautical Applications. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018; pp. 6741–6747. [Google Scholar]
- Zhao, C.; Yin, H.; Yang, Z.; Ma, C. Equivalent series resistance based energy loss analysis of a battery semiactive hybrid energy storage system. Trans. Energy Convers. 2015, 30, 1081–1091. [Google Scholar] [CrossRef]
- Cabrane, Z.; Kim, J.; Yoo, K.; Ouassaid, M. HESS-based photovoltaic/batteries/supercapacitors: Energy management strategy and DC bus voltage stabilization. Sol. Energy 2021, 216, 551–563. [Google Scholar] [CrossRef]
- Hredzak, B.; Agelidis, V.G.; Jang, M. A model predictive control system for a hybrid battery-ultracapacitor power source. Trans. Power Electron. 2014, 29, 1469–1479. [Google Scholar] [CrossRef]
- Lencwe, M.J.; Chowdhury, S.P.D.; Olwal, T.O. Hybrid energy storage system topology approaches for use in transport vehicles: A review. Energy Sci. Eng. 2022, 10, 1449–1477. [Google Scholar] [CrossRef]
- Sinha, S.; Bajpai, P. Power management of hybrid energy storage system in a standalone DC microgrid. J. Energy Storage 2020, 30, 101523. [Google Scholar] [CrossRef]
- Kurm, S.; Agarwal, V. Interfacing Standalone Loads with Renewable Energy Source and Hybrid Energy Storage System Using a Dual Active Bridge Based Multi-Port Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 10, 4738–4748. [Google Scholar] [CrossRef]
- Song, Z.; Li, J.; Han, X.; Xu, L.; Lu, L.; Ouyang, M. Multi-objective optimization of a semi-active battery/supercapacitor energy storage system for electric vehicles. Appl. Energy 2014, 135, 212–224. [Google Scholar] [CrossRef]
- Kumar, K.; Bae, S. Dynamic power management based on model predictive control for hybrid-energy-storage-based grid-connected microgrids. Electr. Power Energy Syst. 2022, 143, 108384. [Google Scholar] [CrossRef]
- Linxiao, G.; Denecke, M.E.; Foley, S.B.; Dong, H.; Qi, Z.; Koenig, G.M., Jr. Electrochemical characterization of lithium cobalt oxide within aqueous flow suspensions as an indicator of rate capability in lithiumion battery electrodes. Electrochim. Acta 2018, 281, 822–830. [Google Scholar]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor—A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Mohamed, M.M.; Zoghby, H.M.E.; Sharaf, S.M.; Mosa, M.A. Optimal virtual synchronous generator control of battery/supercapacitor hybrid energy storage system for frequency response enhancement of photovoltaic/diesel microgrid. J. Energy Storage 2022, 51, 104317. [Google Scholar] [CrossRef]
- Arjanaki, A.A.; Kolagar, A.D.; Pahlavani, M.R.A. A two-level power management strategy in a DC-coupled hybrid microgrid powered by fuel cell and energy storage systems with model predictive controlled interface converter. J. Energy Storage 2022, 52, 104861. [Google Scholar] [CrossRef]
- Capasso, C.; Lauria, D.; Veneri, O. Experimental evaluation of model-based control strategies of sodium-nickel chloride battery plus supercapacitor hybrid storage systems for urban electric vehicles. Appl. Energy 2018, 228, 2478–2489. [Google Scholar] [CrossRef]
- Guo, F.; Sharma, R. A modular multilevel converter with half-bridge submodules for hybrid energy storage systems integrating battery and ultracapacitor. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015. [Google Scholar]
- Jing, W.; Lai, C.H.; Wong, S.H.W.; Wong, M.L.D. Battery supercapacitor hybrid energy storage system in standalone dc microgrids: A review. IET Renew. Power Gener. 2016, 11, 461–469. [Google Scholar] [CrossRef]
- Beuse, T.; Fingerle, M.; Wagner, C.; Winter, M.; Börner, M. Comprehensive Insights into the Porosity of Lithium-Ion Battery Electrodes: A Comparative Study on Positive Electrodes Based on LiNi0.6Mn0.2Co0.2O2 (NMC622). Batteries 2021, 7, 70. [Google Scholar] [CrossRef]
- Qi, N.; Yin, Y.; Dai, K.; Wu, C.; Wang, X.; You, Z. Comprehensive optimized hybrid energy storage system for long-life solar-powered wireless sensor network nodes. Appl. Energy 2021, 290, 116780. [Google Scholar] [CrossRef]
- Ke, M.Y.; Chiu, Y.H.; Wu, C.Y. Battery Modelling and SOC Estimation of a LiFePO4 Battery. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control, Xi’an, China, 4–6 July 2016; pp. 208–211. [Google Scholar]
- Guo, F.; Ye, Y.; Sharma, R. A Modular multilevel converter based battery-ultracapacitor hybrid energy storage system for photovoltaic applications. In Proceedings of the 2015 Clemson University Power Systems Conference (PSC), Clemson, SC, USA, 10–13 March 2015. [Google Scholar]
- Wu, Y.-U.; Tai, C.-H. Novel Bidirectional Isolated DC/DC Converter with High Gain Ratio and Wide Input Voltage for Electric Vehicle Storage Systems. Batteries 2022, 240, 240. [Google Scholar] [CrossRef]
- Liao, H.; Chen, Y.-T.; Chen, J.-F. Development of a Bidirectional DC–DC Converter with Rapid Energy Bidirectional Transition Technology. Energies 2022, 15, 4583. [Google Scholar] [CrossRef]
- Yi, W.; Ma, H.; Peng, S.; Dali, Z.M.L.; Dampage, U.; Hajjiah, A. Analysis and implementation of multi-port bidirectional converter for hybrid energy systems. Energy Rep. 2022, 8, 1538–1549. [Google Scholar] [CrossRef]
- Tomar, P.S.; Srivastava, M.; Verma, A. An Improved Current-Fed Bidirectional DC–DC Converter for Reconfigurable Split Battery in EVs. IEEE Trans. Ind. Appl. 2020, 56, 6957–6967. [Google Scholar] [CrossRef]
- Liu, Y.-C.; K-DSyu, Y.-L.C.; Dung, N.A. High-Frequency and High-Efficiency Isolated Two-Stage Bidirectional DC–DC Converter for Residential Energy Storage Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1994–2006. [Google Scholar] [CrossRef]
- Shreelakshmi, M.P.; Das, M.; Agarwal, V. Design and Development of a Novel High Voltage Gain, High-Efficiency Bidirectional DC–DC Converter for Storage Interface. IEEE Trans. Ind. Electron. 2019, 66, 4490–4501. [Google Scholar]
- Wu, Y.-E.; Ke, Y.-T. A Novel Bidirectional Isolated DC-DC Converter with High Voltage Gain and Wide Input Voltage. IEEE Trans. Power Electron. 2021, 36, 7973–7985. [Google Scholar] [CrossRef]
- Packnezhad, M.; Farzanehfard, H. Soft-Switching High Step-Up/Down Converter Using Coupled Inductors with Minimum Number of Components. IEEE Trans. Ind. Electron. 2021, 68, 7938–7945. [Google Scholar] [CrossRef]
- Santra, S.B.; Liang, T.-J. High Gain and High-Efficiency Bidirectional DC–DC Converter With Current Sharing Characteristics Using Coupled Inductor. IEEE Trans. Power Electron. 2021, 36, 12819–12833. [Google Scholar] [CrossRef]
- Mohammadi, M.R.; Amoorezaei, A.; Khajehoddin, S.A.; Moez, K. A High Step-Up/Step-Down LVS-Parallel HVS-Series ZVS Bidirectional Converter with Coupled Inductors. IEEE Trans. Power Electron. 2022, 37, 1945–1961. [Google Scholar]
- Kardan, F.; Alizadeh, R.; Banaei, M.R. A New Three Input DC/DC Converter for Hybrid PV/FC/Battery Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1771–1778. [Google Scholar] [CrossRef]
- Texas Instruments LM5170EVM-BIDIR Manual. Available online: https://www.ti.com/tool/LM5170EVM-BIDIR (accessed on 28 January 2023).
- LiFePO4 ANR26650M1-B Technical Data. Available online: https://www.bto.pl/pdf/04579/MD100113-01-ANR26650M1B.pdf (accessed on 28 January 2023).
- Maxwell BMOD0058 E016 B02 Technical Data. Available online: https://maxwell.com/wp-content/uploads/2021/08/3003212.2_Datasheet_BMOD0058-E016-C02.pdf (accessed on 28 January 2023).
- Wang, Y.; Gao, G.; Li, X.; Chen, Z. A Fractional–Order Model–Based State Estimation Approach for Lithium–Ion Battery and Ultra–Capacitor Hybrid Power Source System Considering Load Trajectory. J. Power Sources 2020, 449, 227543. [Google Scholar] [CrossRef]
- Kristen, A.S.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data–Driven Prediction of Battery Cycle Life Before Capacity Degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar]
- Tan, B.; Li, H.; Zhao, D.; Liang, Z.; Ma, R.; Huangfu, Y. Finite-control-set model predictive control of interleaved DC-DC boost converter Based on Kalman observer. eTransportation 2022, 11, 100158. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium–Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Zhang, C.; Allafi, W.; Dinh, Q.; Ascencio, P.; Marco, J. Online Estimation of Battery Equivalent Circuit Model Parameters and State of Charge Using Decoupled Least Squares Technique. Energy 2018, 142, 678–688. [Google Scholar] [CrossRef]
- Guo, W.; Sun, Z.; Vilsen, S.B.; Meng, J.; Stroe, D.I. Review of “grey box” lifetime modeling for lithium-ion battery: Combining physics and data-driven methods. J. Energy Storage 2022, 56, 105992. [Google Scholar] [CrossRef]
- Lai, Y.; Du, S.; Ai, L.; Cheng, Y.; Ji, M. Insight into Heat Generation of Lithium–Ion Batteries Based on the Electrochemical–Thermal Model at High Discharge Rates. Int. J. Hydrog. Energy 2015, 40, 13039–13049. [Google Scholar] [CrossRef]
- Chmielewski, A.; Możaryn, J.; Piórkowski, P.; Bogdziński, K. Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle. Energies 2018, 11, 3160. [Google Scholar] [CrossRef]
- Ramadan, H.S.; Becherif, M.; Claude, F. Extended kalman filter for accurate state of charge estimation of lithium-based batteries: A comparative analysis. Int. J. Hydrog. Energy 2017, 42, 29033–29046. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J.X. State-of-Charge Estimation of the Lithium-Ion, Battery Using an Adaptive Extended Kalman Filter Based on an Improved Thevenin Model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Chia, Y.Y.; Lee, L.H.; Shafiabady, N.; Isa, D. A load predictive energy management system for supercapacitor–battery hybrid energy storage system in solar application using the Support Vector Machine. Appl. Energy 2015, 137, 588–602. [Google Scholar] [CrossRef]
- Bordes, A.; Danilov, D.; Desprez, P.; Lecocq, A.; Marlair, G.; Truchot, B.; Dahmani, M.; Siret, C.; Laurent, S.; Herreyre, S.; et al. A holistic contribution to fast innovation in electric vehicles: An overview of the DEMOBASE research project. eTransportation 2022, 11, 100144. [Google Scholar] [CrossRef]
- Chmielewski, A.; Możaryn, J.; Piórkowski, P.; Dybała, J. Comparison of hybrid recurrent neural networks and dual polarization models of valve regulated lead acid battery. Int. J. Energy Res. 2021, 45, 2560–2580. [Google Scholar] [CrossRef]
- Sun, J.; Tang, C.; Li, X.; Wang, T.; Jiang, T.; Tang, Y.; Chen, S.; Qiu, S.; Zhu, C. A remaining charging electric quantity based pack available capacity optimization method considering aging inconsistency. eTransportation 2022, 11, 100149. [Google Scholar] [CrossRef]
- Chang, L.; Yujie, W.; Li, W.; Zonghai, C. Load–Adaptive Real–Time Energy Management Strategy for Battery/ Ultracapacitor Hybrid Energy Storage System Using Dynamic Programming Optimization. J. Power Sources 2019, 438, 227024. [Google Scholar]
- Lu, X.; Chen, Y.; Fu, M.; Wang, H. Multi–Objective Optimization–Based Real–Time Control Strategy for Battery/Ultracapacitor Hybrid Energy Management Systems. IEEE Access 2019, 7, 11640–11650. [Google Scholar] [CrossRef]
- Piao, N.; Gao, X.; Yang, H.; Guo, Z.; Hu, G.; Cheng, H.-M.; Li, F. Challenges and development of lithium-ion batteries for low temperature environments. eTransportation 2022, 11, 100145. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Wang, Z.; He, J.; Yu, S. Lithium battery state-of-health estimation and remaining useful lifetime prediction based on non-parametric aging model and particle filter algorithm. eTransportation 2022, 11, 100156. [Google Scholar] [CrossRef]

















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | DC/DC Converter in [80] | DC/DC Converter in [81] | DC/DC Converter in [82] | DC/DC Converter in [83] | DC/DC Converter in [84] | DC/DC Converter in [85] | DC/DC Converter in [86] | DC/DC Converter in [87] | DC/DC Converter in [88] | DC/DC Converter in [89] | DC/DC Converter in [90] | This Paper [91] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| The number of switches | 6 | 4 | 2 | 4 | 10 | 4 | 6 | 3 | 6 | 4 | 4 | 4 |
| The number of diodes | 0 | - | - | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 4 | 2 |
| The number of capacitors | 4 | 2 | 3 | 6 | 3 | 2 | 3 | 1 | 4 | 3 | 4 | 2 |
| Number of inductors | 1 | 2 | 2 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 1 |
| Input voltage Vin | 24–58 V | 24 V | 12–20 V | 24–48 V | 35–50 V | 40 V | 24–55 V | 48 V | 48 V | 48 V | 35 V | from 6 V to 75 V |
| Output voltage Vout | 400 V | 200 V | 60–70 V | 360 V | 400 V | 400 V | 400 V | 380 V | 384 V | 400 V | 285 V | 12–48 V |
| Bidirectional | yes | yes | Yes | yes | yes | yes | yes | yes | yes | yes | yes | Yes |
| Efficiency of Step Down mode [%] | 95% | 94% | 94.2% | 93% | 94% | 94% | 94% | 95% | 96% | 95% | 90% | Presented in this paper |
| Efficiency of Step Up mode [%] | 96% | 95% | 94.2% | 94% | 94% | 94% | 96% | 94% | 96% | 95% | 90% | Presented in this paper |
| Boost or buck operation | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Rated power [W] | 1000 W | 500 W | 120 W | 250 W | 1000 W | 300 W | 500 W | 300 W | 250 W | 400 W | 140 W | Up to 750 W or 500 W per channel |
| Switching frequency [kHz] | 40 kHz | 50 kHz | 50 kHz | 100–145 kHz | 700 kHz 350 kHz–1 MHz | 50 kHz | 40 kHz | 100 kHz | 50 kHz | 100–180 kHz | 30 kHz | 50–500 kHz |
| PWM control signals | normal | normal | normal | normal | complex | normal | normal | normal | normal | complex | normal | normal |
| Battery LiFePO4 [92] | Ultracapacitor BMOD0058 E016 B02 [93] | ||
|---|---|---|---|
| Parameter Name | Value | Parameter Name | Value |
| Nominal voltage | 3.3 V | Maximum rated voltage | 16 V |
| Minimum voltage | 2 V | Minimum voltage | 0 V |
| Maximum voltage | 3.6 V | Absolute maximum voltage | 17 V |
| Capacity | 2.5 Ah | Capacity | 58 F |
| Internal resistance | 6 mΩ | Initial equivalent series resistance | 22 mΩ |
| Maximum discharge current | 70 A(cont.)/120 A | Maximum continuous current | 23 A (cont.)/190 A |
| Dimensions (L × W × H, [mm]) | Ø26 × 65 | Dimensions (L × W × H, [mm]) | 226.5 × 49.5 × 75.9 |
| Cycle life | >1000 | ~5,000,000 | |
| Weight | 0.076 kg | Weight | 0.63 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chmielewski, A.; Piórkowski, P.; Bogdziński, K.; Możaryn, J. Application of a Bidirectional DC/DC Converter to Control the Power Distribution in the Battery–Ultracapacitor System. Energies 2023, 16, 3687. https://0-doi-org.brum.beds.ac.uk/10.3390/en16093687
Chmielewski A, Piórkowski P, Bogdziński K, Możaryn J. Application of a Bidirectional DC/DC Converter to Control the Power Distribution in the Battery–Ultracapacitor System. Energies. 2023; 16(9):3687. https://0-doi-org.brum.beds.ac.uk/10.3390/en16093687
Chicago/Turabian StyleChmielewski, Adrian, Piotr Piórkowski, Krzysztof Bogdziński, and Jakub Możaryn. 2023. "Application of a Bidirectional DC/DC Converter to Control the Power Distribution in the Battery–Ultracapacitor System" Energies 16, no. 9: 3687. https://0-doi-org.brum.beds.ac.uk/10.3390/en16093687