Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests


Abstract
:1. Introduction
2. Materials and Methods
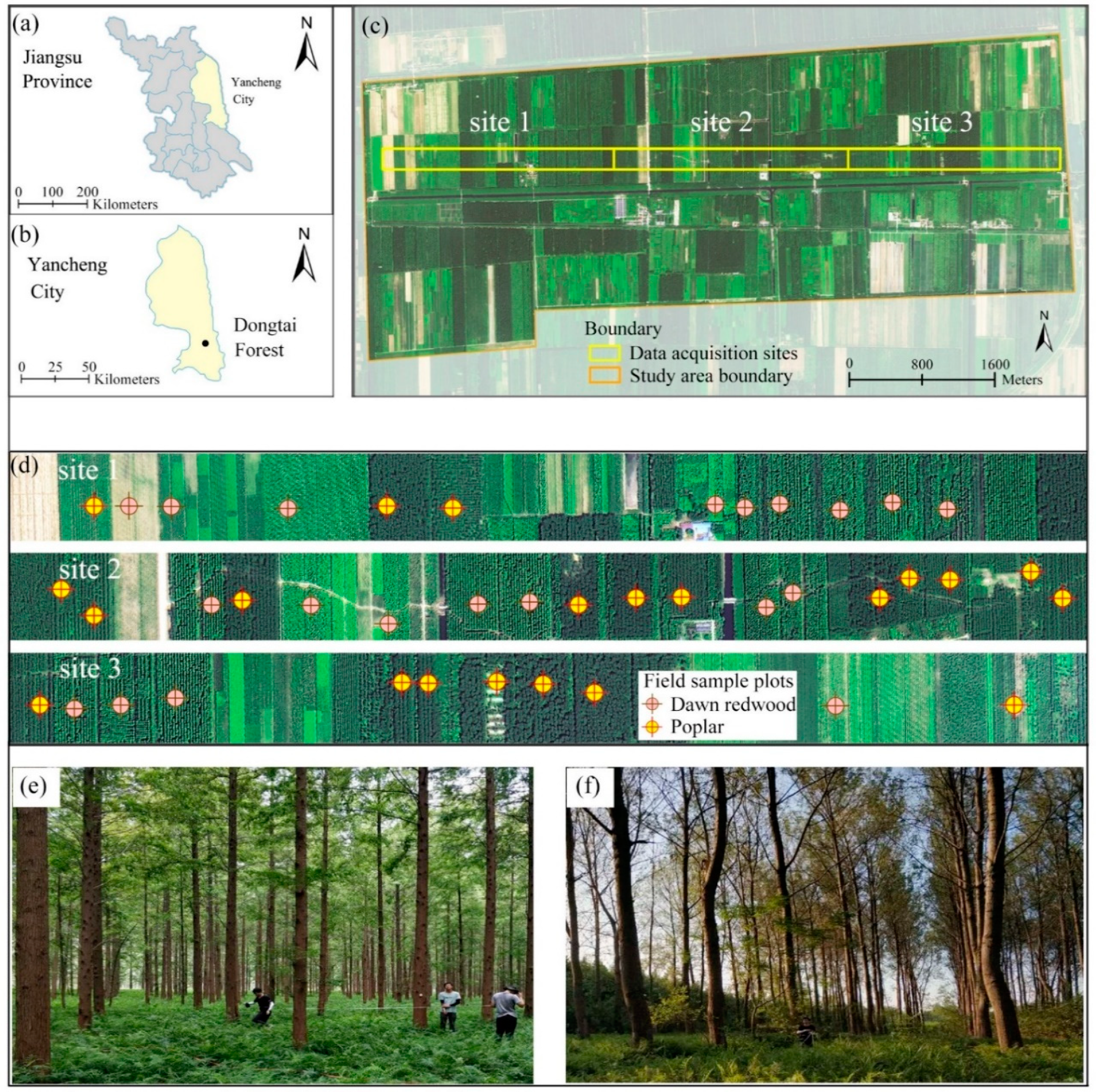
2.1. Study Area
2.2. Field Data
2.3. UAV Platforms and Sensors
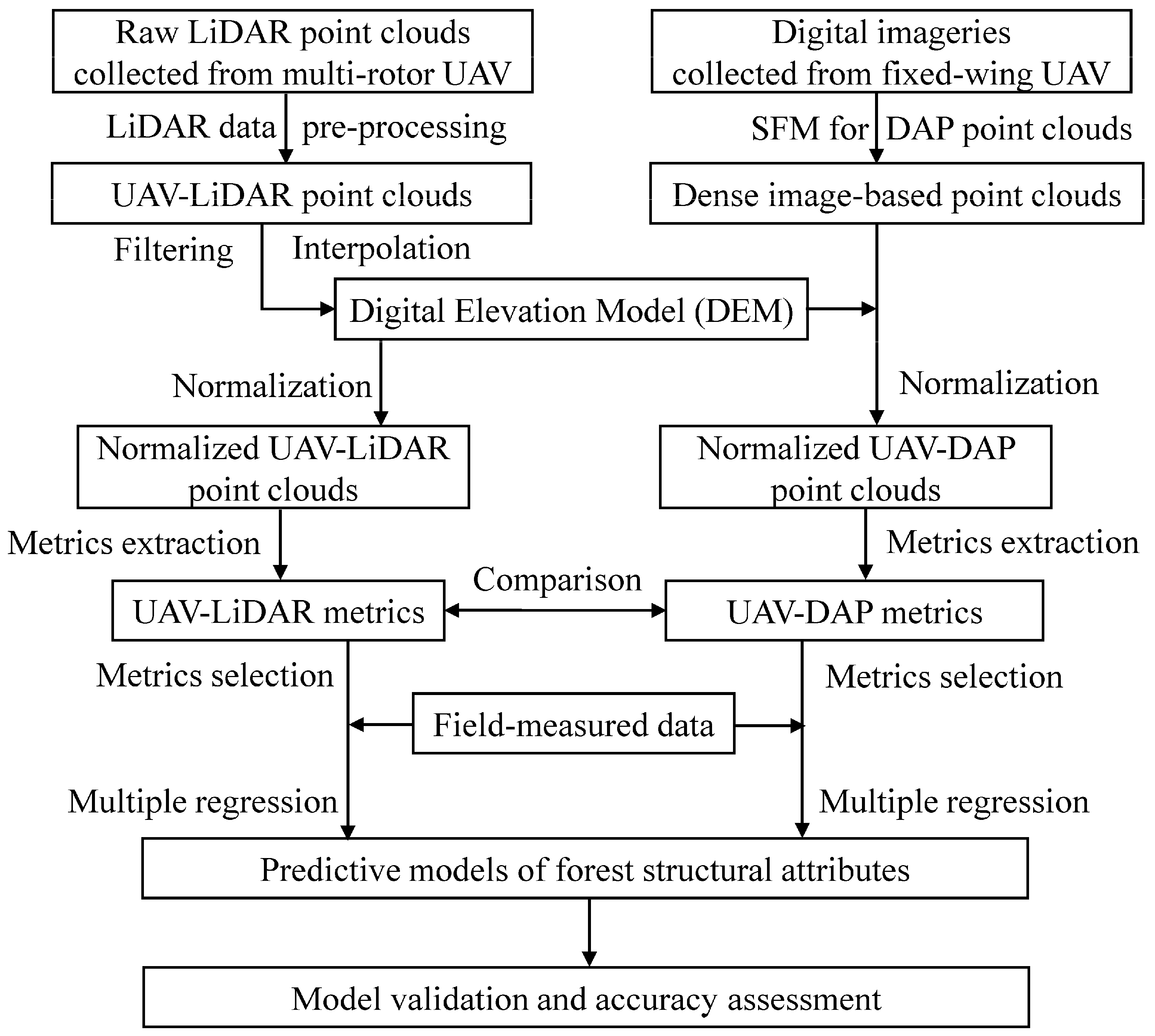
2.4. UAV Data
2.4.1. UAV-LiDAR Data and Processing
2.4.2. UAV Imagery Acquisition and Point Cloud Processing
2.5. UAV-LiDAR and UAV-DAP Point Cloud Metrics
2.5.1. Canopy Volume Metric Calculation
2.5.2. Weibull Metric Calculation
2.6. Metric Selection and Regression Analysis
3. Results
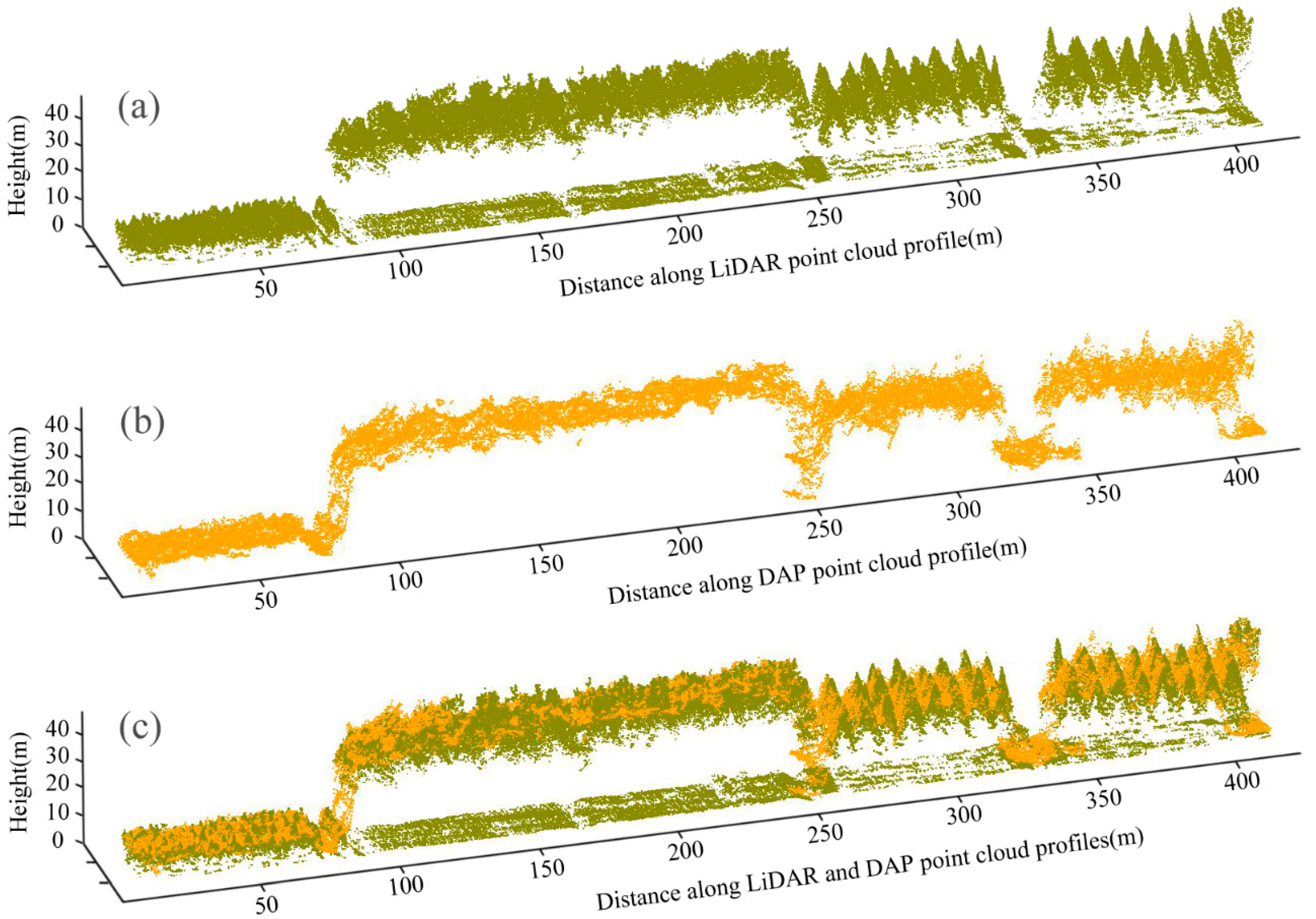
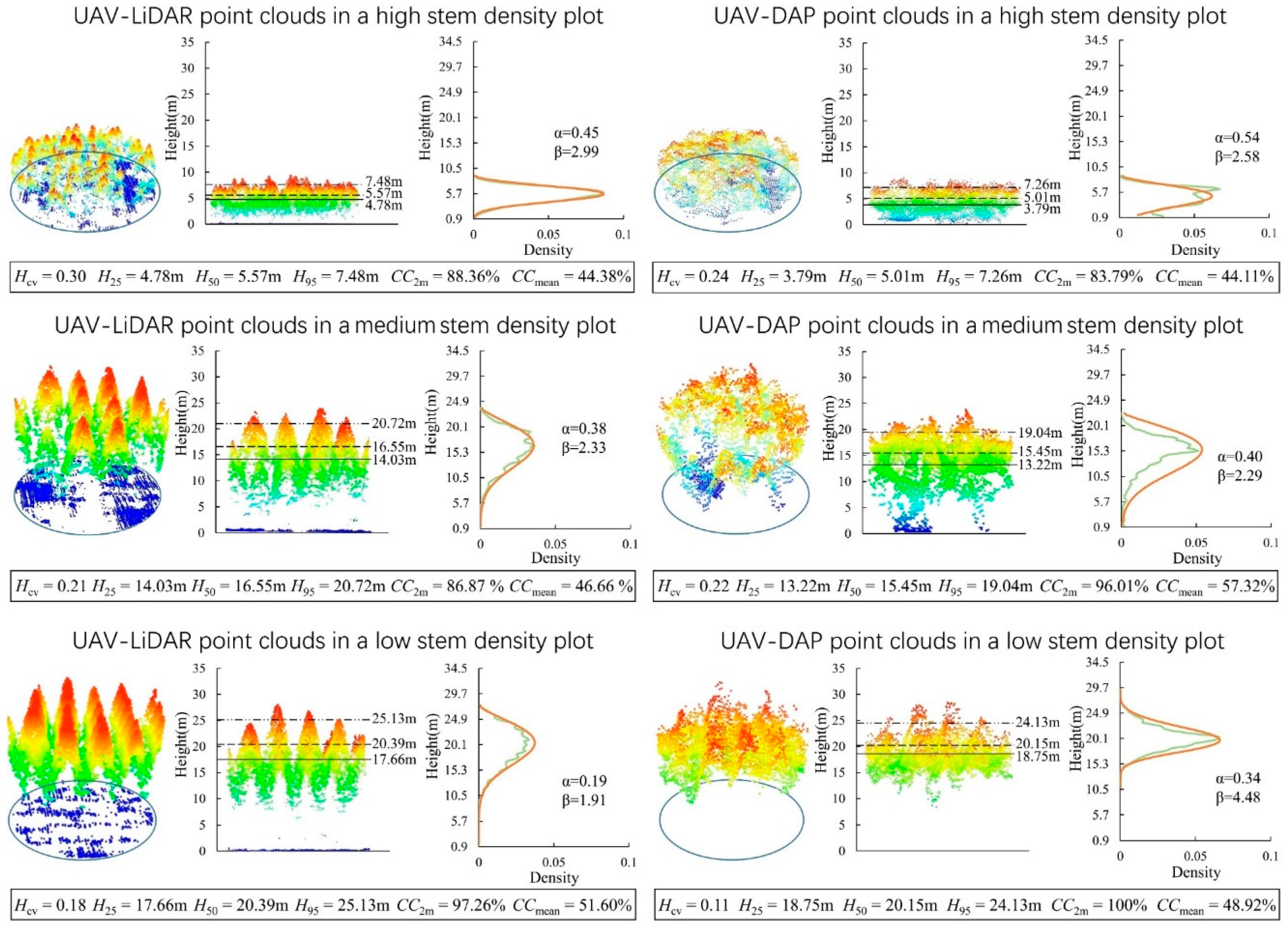
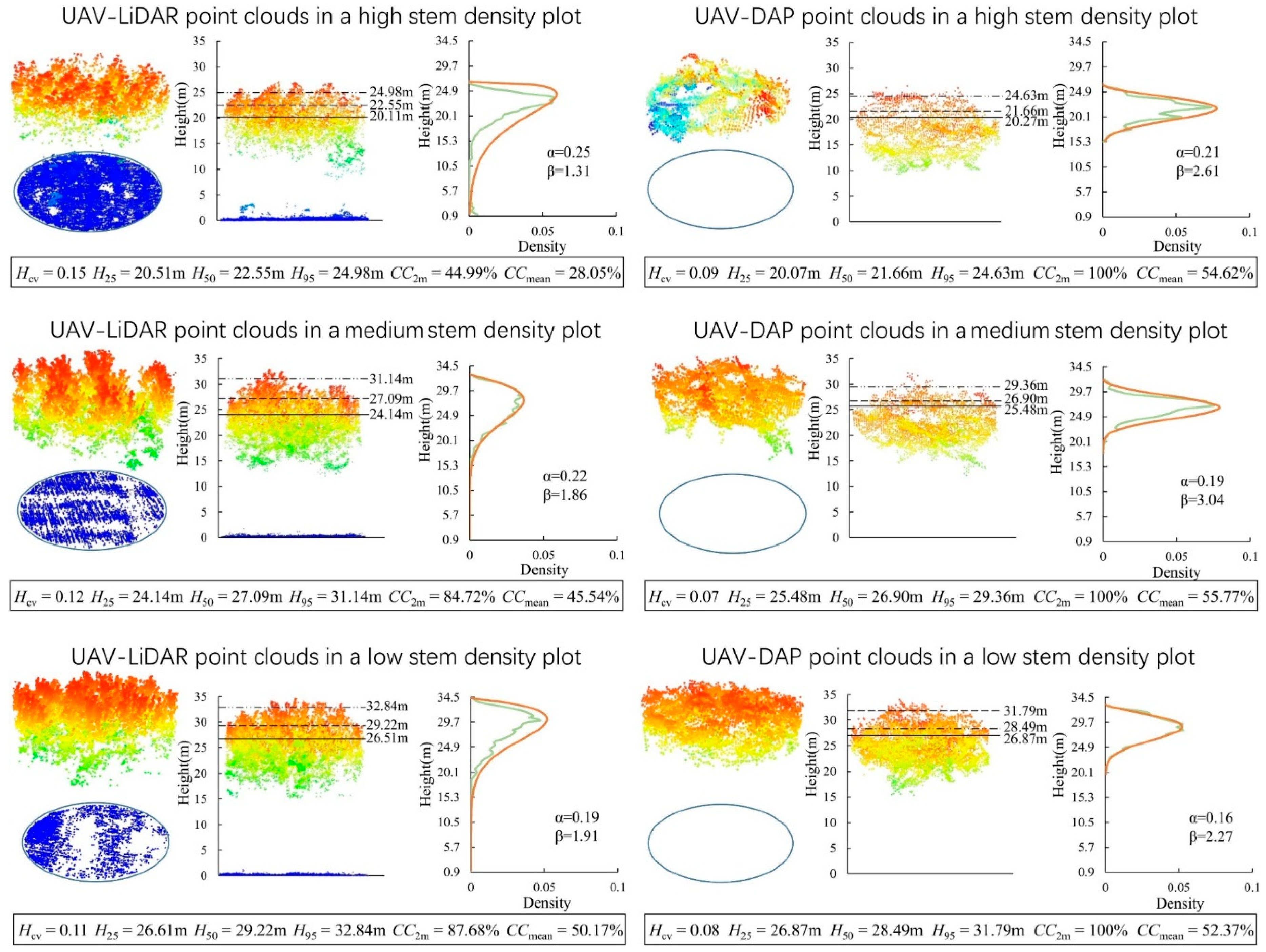
3.1. Visual Comparison of UAV-LiDAR and UAV-DAP Point Clouds and Metrics
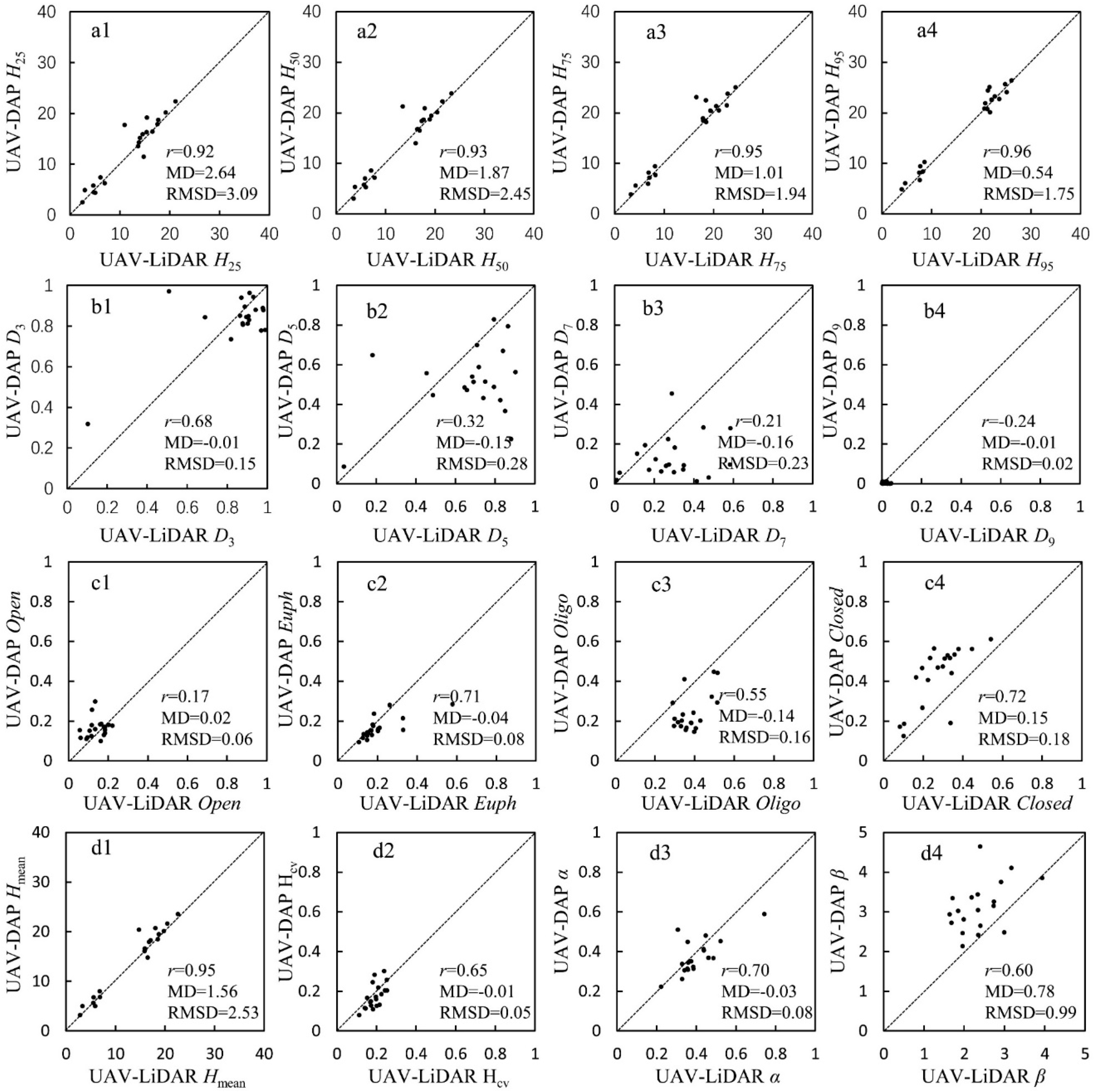
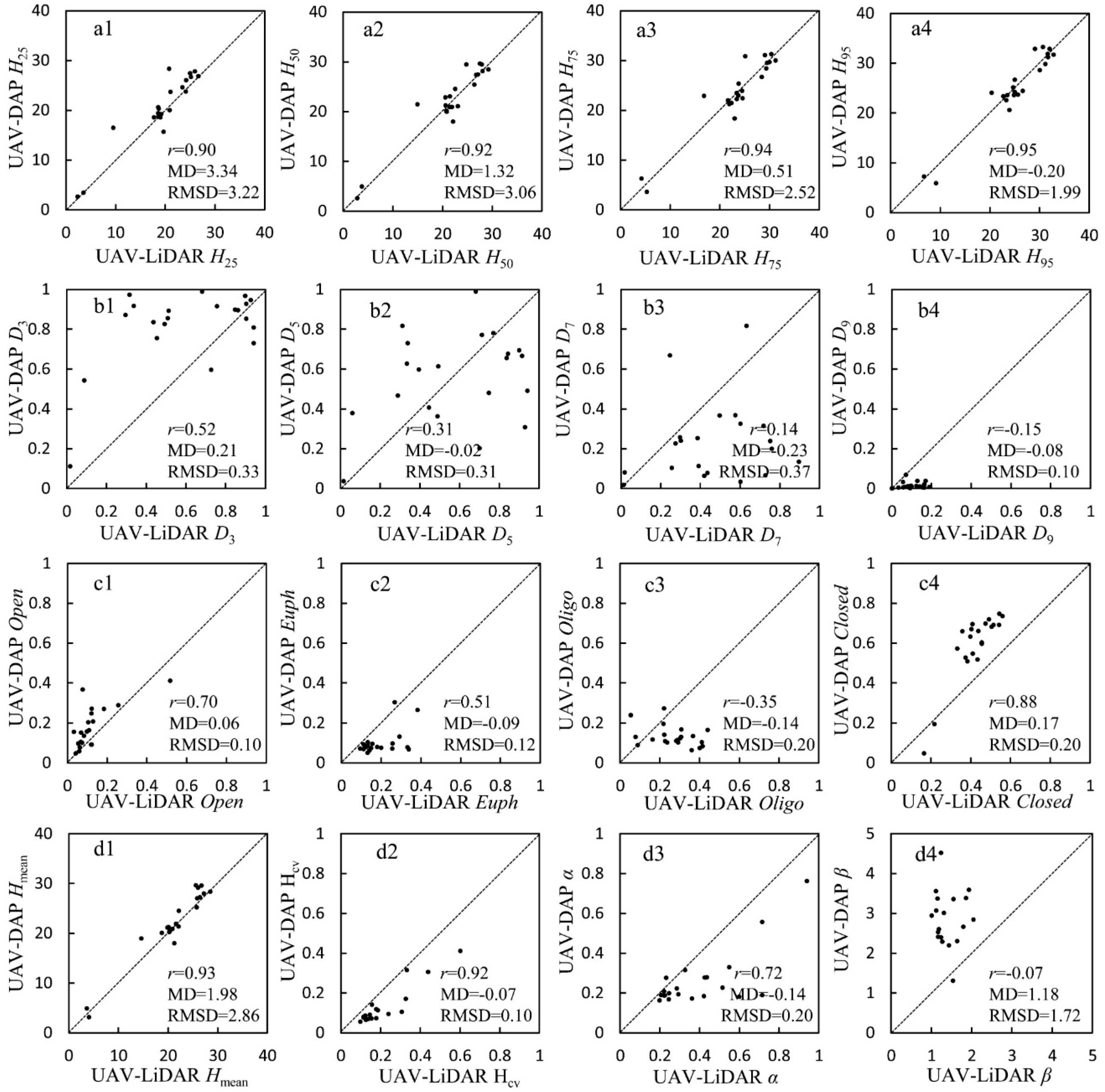
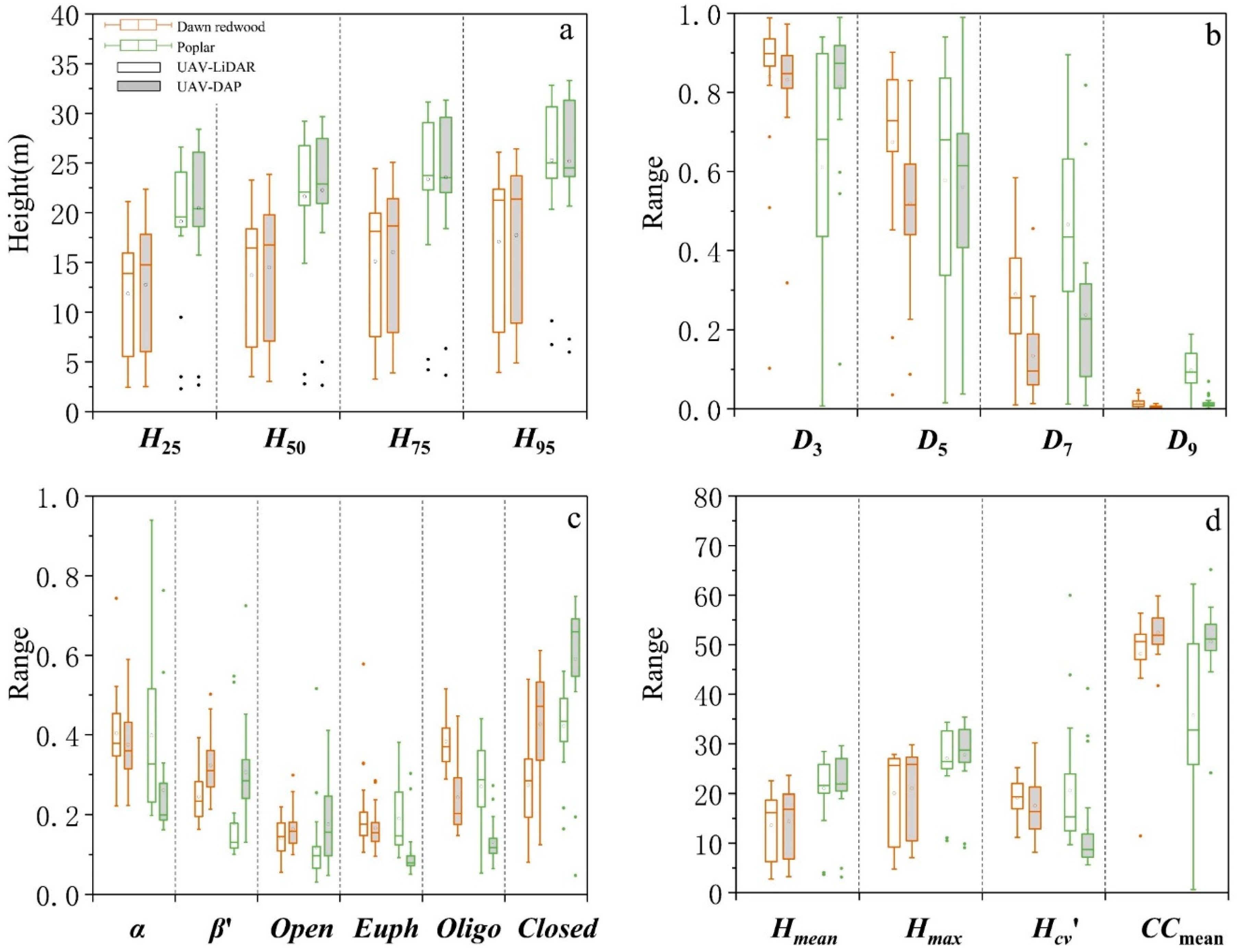
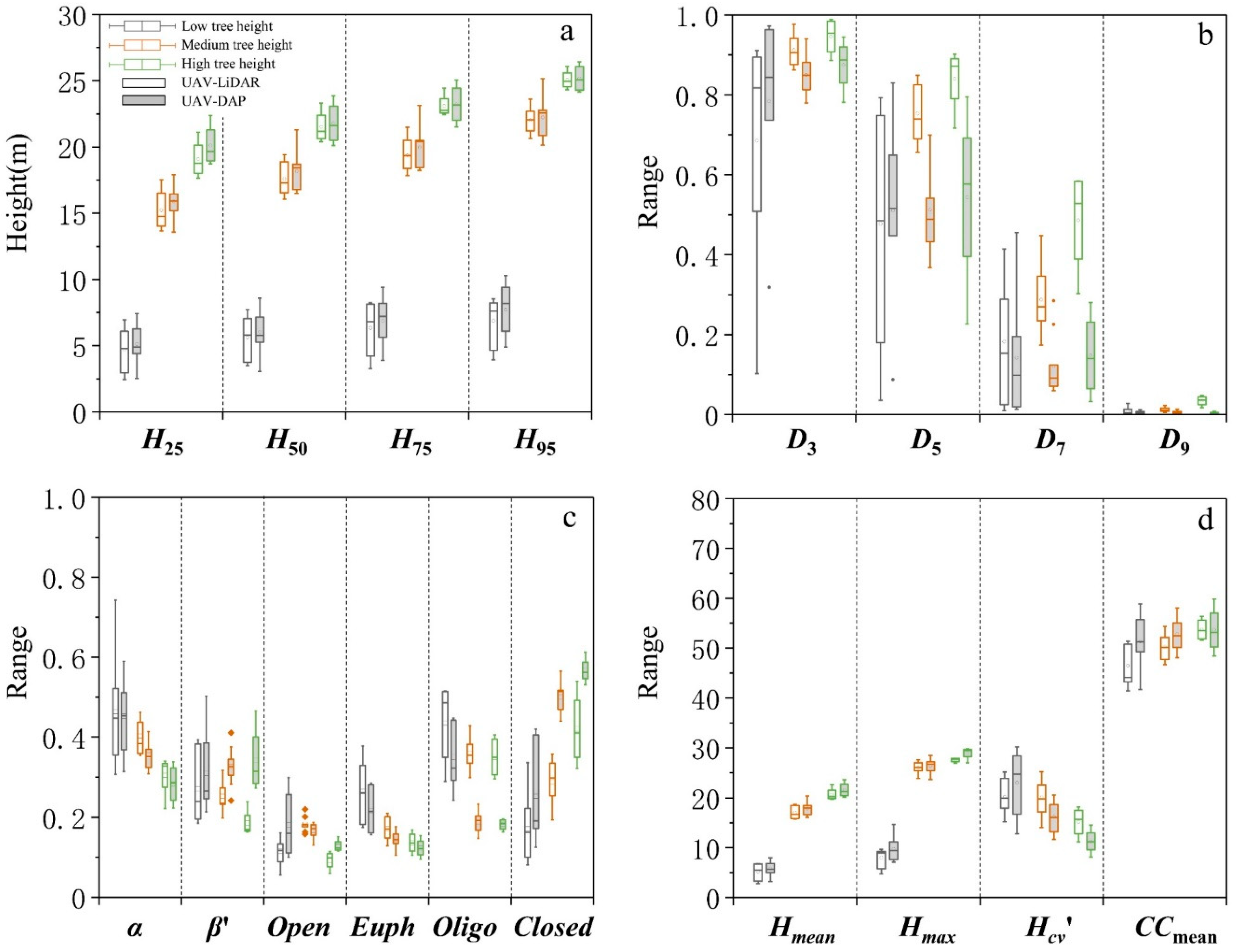
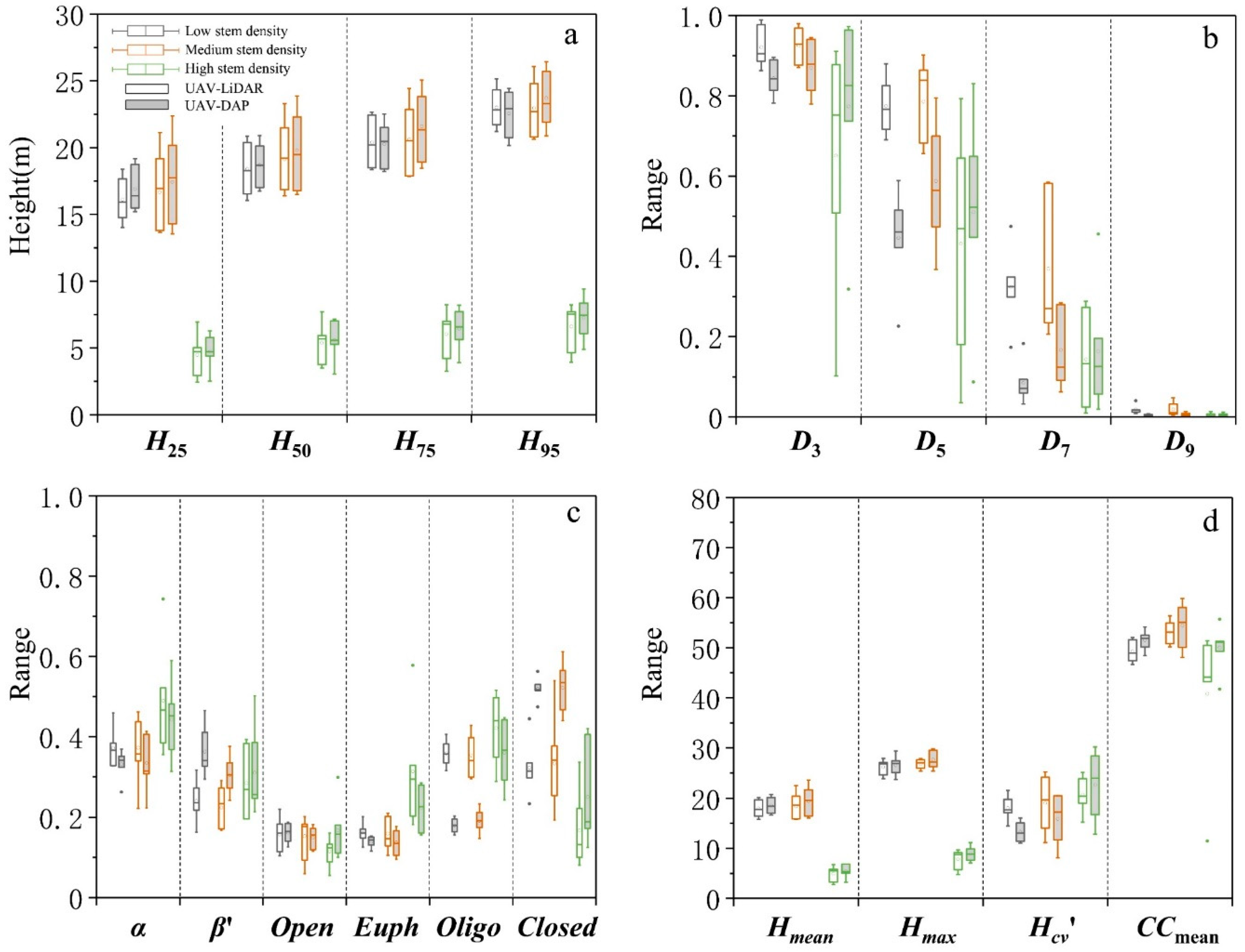
3.2. Statistical Comparison of UAV-LiDAR and DAP Metrics
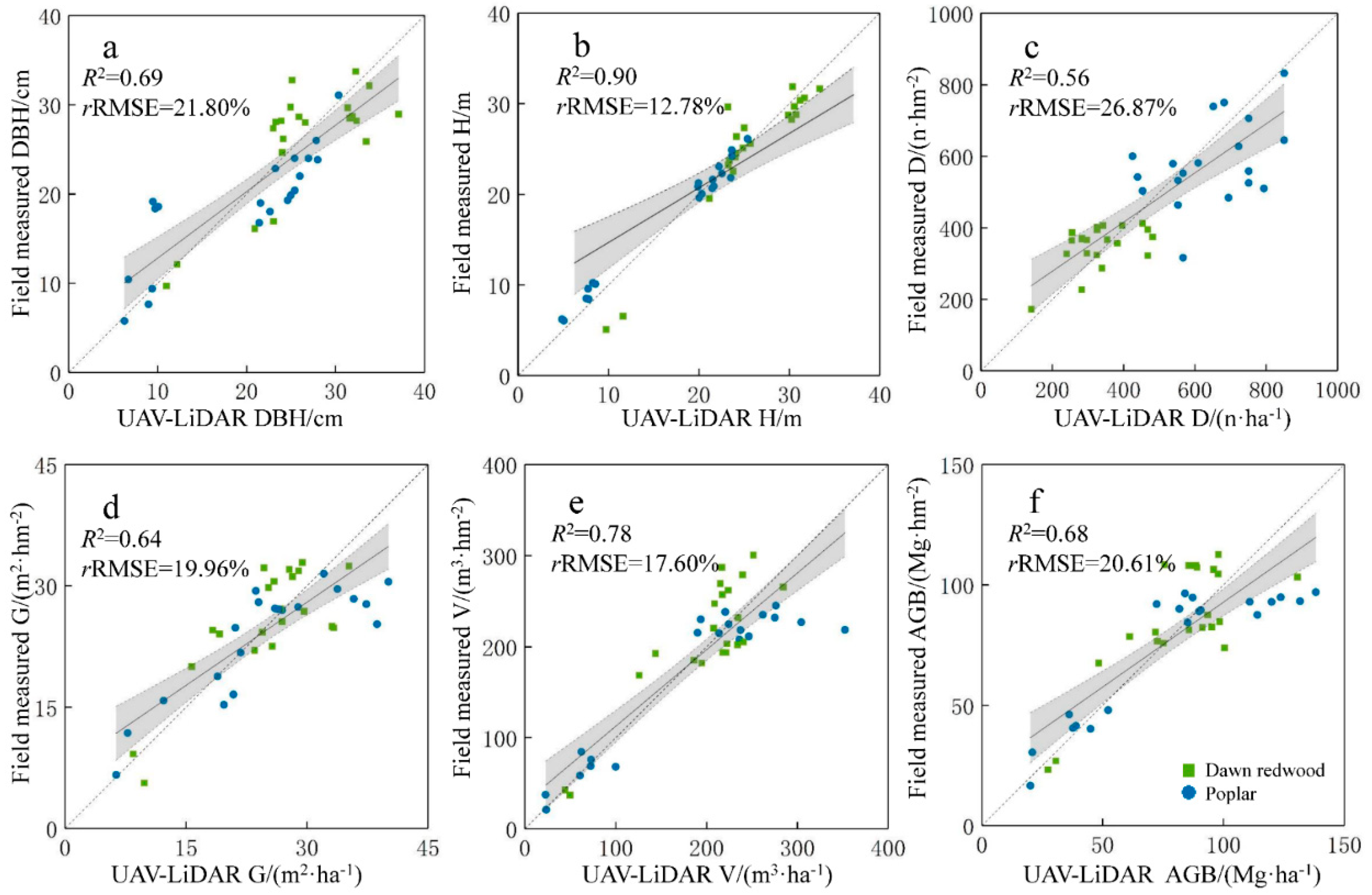
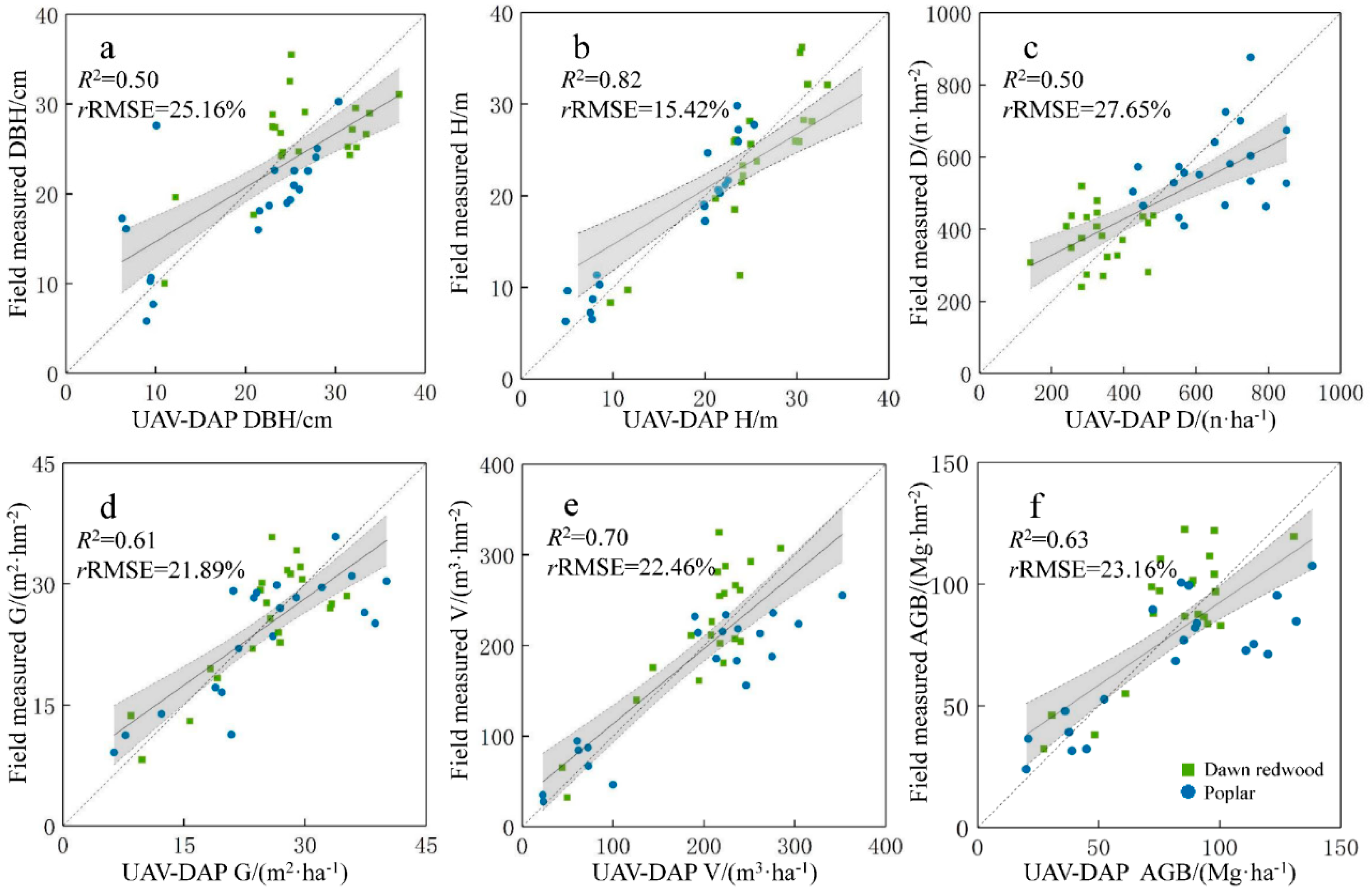
3.3. Forest Structural Attribute Modeling and Accuracy Assessment
4. Discussion
4.1. Comparison of UAV-LiDAR and UAV-DAP Point Clouds and Metrics
4.2. Forest Structural Attribute Modeling and Accuracy Assessment
4.3. Limitations of DAP Point Clouds and Future Works
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Species | Equations | Parameters |
|---|---|---|
| Dawn redwood | V = A × DB × ((E + F × e(G × D))H)C | A = 0.000058777042, B = 1.9699831, C = 0.89646157, E = 1.000438, F = −0.00024755, G = −0.07897864, H = 7101.252. |
| Poplar | V = A × DB × ((E + F × e(G × D))H)C | A = 0.000050479055, B = 1.9085054, C = 0.99076507, E = 0.9236004, F = 0.0502109, G = −0.09686479, H = −37.80742. |
References
- Food and Agriculture Organization of the United Nations (FAO). Global Forest Resources Assessment 2015: How Are the World’s Forests Changing? FAO: Rome, Italy, 2015. [Google Scholar]
- Carle, J.; Holmgren, P. Wood from planted forests: A global outlook 2005–2030. For. Prod. J. 2008, 58, 6–18. [Google Scholar]
- Carnus, J.-M.; Parrotta, J.; Brockerhoff, E.; Arbez, M.; Jactel, H.; Kremer, A.; Lamb, D.; O’Hara, K.; Walters, B. Planted forests and biodiversity. J. For. 2006, 104, 65–77. [Google Scholar]
- Pawson, S.M.; Brin, A.; Brockerhoff, E.G.; Lamb, D.; Payn, T.W.; Paquette, A.; Parrotta, J.A. Plantation forests, climate change and biodiversity. Biodivers. Conserv. 2013, 22, 1203–1227. [Google Scholar] [CrossRef]
- Wulder, M.A.; Bater, C.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Thompson, I.D.; Maher, S.C.; Rouillard, D.P.; Fryxell, J.M.; Baker, J.A. Accuracy of forest inventory mapping: Some implications for boreal forest management. For. Ecol. Manag. 2007, 252, 208–221. [Google Scholar] [CrossRef]
- Ewald, F.; Lati, H.; Stere, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar]
- Breidenbach, J.; Magnussen, S.; Rahlf, J.; Astrup, R. Unit-level and area-level small area estimation under heteroscedasticity using digital aerial photogrammetry data. Remote Sens. Environ. 2018, 212, 199–211. [Google Scholar] [CrossRef]
- Becker, G. Precision Forestry in Central Europe New Perspectives for a Classical Management Concept. Precis. For. 2001, 7, 397–414. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Vastaranta, M.; Wulder, M.A.; Saarinen, N.; Stepper, C.; Coops, N.C. A Model Development and Application Guide for Generating an Enhanced Forest Inventory Using Airborne Laser Scanning Data and an Area-Based Approach; Canadian Wood Fibre Centre: Victoria, BC, Canada, 2017; ISBN 9780660097381. [Google Scholar]
- Groot, A.; Cortini, F.; Wulder, M.A. Crown-fibre attribute relationships for enhanced forest inventory: Progress and prospects. For. Chron. 2015, 91, 266–279. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point Clouds. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E.S. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Harding, D.J. Lidar remote sensing of above-ground biomass in three biomes. Glob. Ecol. Biogeogr. 2002, 393–399. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Knox, R.G.; Clark, D.B.; Blair, J.B. Sensitivity of large-footprint lidar to canopy structure and biomass in a neotropical rainforest. Remote Sens. Environ. 2002, 81, 378–392. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.A. Estimating canopy structure of Douglas-fir forest stands from discrete-return LiDAR. Trees—Struct. Funct. 2007, 21, 295–310. [Google Scholar] [CrossRef]
- St-Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar] [CrossRef]
- Gobakken, T.; Bollandsås, O.M.; Næsset, E. Comparing biophysical forest characteristics estimated from photogrammetric matching of aerial images and airborne laser scanning data. Scand. J. For. Res. 2015, 30, 73–86. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Næsset, E.; Astrup, R. Comparison of four types of 3D data for timber volume estimation. Remote Sens. Environ. 2014, 155, 325. [Google Scholar] [CrossRef]
- Puliti, S.; Gobakken, T.; Ørka, H.O.; Næsset, E. Assessing 3D point clouds from aerial photographs for species-specific forest inventories. Scand. J. For. Res. 2017, 32, 68–79. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; McCartney, G.; MacLean, D.A. Digital aerial photogrammetry for assessing cumulative spruce budworm defoliation and enhancing forest inventories at a landscape-level. ISPRS J. Photogramm. Remote Sens. 2018, 142, 1–11. [Google Scholar] [CrossRef]
- Pitt, D.G.; Woods, M.; Penner, M. A comparison of point clouds derived from stereo imagery and airborne laser scanning for the area-based estimation of forest inventory attributes in boreal Ontario. Can. J. Remote Sens. 2014, 40, 214–232. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparison of airborne laser scanning and digital stereo imagery for characterizing forest canopy gaps in coastal temperate rainforests. Remote Sens. Environ. 2018, 208, 1–14. [Google Scholar] [CrossRef]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing ALS and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Giannetti, F.; Chirici, G.; Gobakken, T.; Næsset, E.; Travaglini, D.; Puliti, S. A new approach with DTM-independent metrics for forest growing stock prediction using UAV photogrammetric data. Remote Sens. Environ. 2018, 213. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Zaldei, A.; Wallace, L.; Torresan, C.; et al. Forestry applications of UAVs in Europe: A review Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Remote Sensing of Environment Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Goodbody, T.; Coops, N.; Hermosilla, T.; Tompalski, P.; Pelletier, G. Vegetation Phenology Driving Error Variation in Digital Aerial Photogrammetrically Derived Terrain Models. Remote Sens. 2018, 10, 1554. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Crawford, P. Assessing the status of forest regeneration using digital aerial photogrammetry and unmanned aerial systems. Int. J. Remote Sens. 2017, 1–19. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 01, 61–68. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; Mcvay, J.; Sankey, J.B. Remote Sensing of Environment UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B.-L. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, J.; Kang, L. A study on biomass equations for Metasequoia glyptostroboides shelterbelt in the coastal agroforestry. Jiangsu For. Sci. Technol 2015, 24, 1–4. [Google Scholar]
- Wallace, L.; Lucieer, A.; Turner, D.; Vopˇ, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Shen, X.; Cao, L. Tree-Species Classification in Subtropical Forests Using Airborne Hyperspectral and LiDAR Data. Remote Sens. 2017, 9, 1180. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Innes, J.L.; Sheppard, S.R.J.; Fu, L.; Ruan, H.; She, G. Estimation of forest biomass dynamics in subtropical forests using multi-temporal airborne LiDAR data. Remote Sens. Environ. 2016, 178, 158–171. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.; Rodríguez-Pérez, J.; Ordóñez, C.; Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, L.; She, G. Estimating forest structural parameters using canopy metrics derived from airborne LiDAR data in subtropical forests. Remote Sens. 2017, 9, 940. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Weishampel, J.F.; Drake, J.B.; Cooper, A.; Blair, J.B.; Hofton, M. Forest canopy recovery from the 1938 hurricane and subsequent salvage damage measured with airborne LiDAR. Remote Sens. Environ. 2007, 109, 142–153. [Google Scholar] [CrossRef]
- Lovell, J.L.; van Gorsel, E.; Hopkinson, C.; Chasmer, L. Foliage Profiles from Ground Based Waveform and Discrete Point Lidar. SilviLaser 2011, 4, 1–10. [Google Scholar]
- John, A.; Kershaw, J.; Maguire, D.A. Crown structure in western hemlock, Douglas-fir, and grand fir in western Washington: Trends in branch-level mass and leaf area. Can. J. For. Res. 1995, 25, 1897–1912. [Google Scholar]
- Magnussen, S.; Eggermont, P.; Lariccia, V.N. Recovering tree heights from airborne laser scanner data. For. Sci. 1999, 45, 407–422. [Google Scholar]
- Cao, L.; Gao, S.; Li, P.; Yun, T.; Shen, X.; Ruan, H. Aboveground biomass estimation of individual trees in a coastal planted forest using full-waveform airborne laser scanning data. Remote Sens. 2016, 8, 729. [Google Scholar] [CrossRef]
- Sprugel, D.G. Correcting for Bias in Log-Transformed Allometric Equations. Ecology 1983, 64, 209. [Google Scholar] [CrossRef]
- García-Gutiérrez, J.; Martínez-Álvarez, F.; Troncoso, A.; Riquelme, J.C. A comparison of machine learning regression techniques for LiDAR-derived estimation of forest variables. Neurocomputing 2015, 167, 24–31. [Google Scholar] [CrossRef]
- Hirotugu, A. A new look at the statistical model identification. Autom. Control Comput. Sci 1974, 6, 716–723. [Google Scholar]
- Bengio, Y.; Grandvalet, Y. No unbiased estimator of the variancee of k-fold cross-valudation. J. Mach. Learn. Res. 2004, 5, 1089–1105. [Google Scholar]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, H.; Vastaranta, M.; et al. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative res. Can. J. Remote Sens. 2014, 39, 382–395. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Astrup, R. Forest parameter prediction using an image-based point cloud: A comparison of semi-ITC with ABA. Forests 2015, 6, 4059–4071. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Straub, C.; Stepper, C.; Seitz, R.; Waser, L.T. Potential of UltraCamX stereo images for estimating timber volume and basal area at the plot level in mixed European forests. Can. J. For. Res. 2013, 43, 731–741. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Tompalski, P.; Crawford, P.; Day, K.J.K. Updating residual stem volume estimates using point clouds. Int. J. Remote Sens. 2016, 1161, 2938–2953. [Google Scholar]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Hall, S.A.; Burke, I.C.; Stoker, J. Estimating stand structure using discrete- return LiDAR: An example from low density, fire prone ponderosa pine forests Estimating stand structure using discrete-return lidar: An example from low density, fire prone ponderosa pine forests. For. Ecol. Manag. 2005. [Google Scholar] [CrossRef]
- Bottalico, F.; Chirici, G.; Giannini, R.; Mele, S.; Mura, M.; Puxeddu, M.; Mcroberts, R.E.; Valbuena, R.; Travaglini, D. International Journal of Applied Earth Observation and Geoinformation Modeling Mediterranean forest structure using airborne laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 145–153. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-borne LIDAR for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote sensing of vegetation structure using computer vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Meesuk, V.; Vojinovic, Z.; Mynett, A.E.; Abdullah, A.F. Urban flood modelling combining top-view LiDAR data with ground-view SfM observations. Adv. Water Resour. 2015, 75, 105–117. [Google Scholar] [CrossRef]












| Attributes | All Plots (n = 41) | Dawn Redwood (n = 20) | Poplar (n = 21) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Range | Mean | SD | Range | Mean | SD | Range | Mean | SD | |
| DBH (cm) | 6.3–37.1 | 23.0 | 8.3 | 6.3–30.3 | 19.4 | 8.4 | 11.0–37.1 | 26.3 | 6.7 |
| H (m) | 4.9–33.4 | 21.2 | 8.0 | 4.9–25.4 | 16.8 | 7.5 | 9.7–33.3 | 25.3 | 6.1 |
| D (n·ha−1) | 142–850 | 484.8 | 190.7 | 425–850 | 643.9 | 129.8 | 142–482 | 333.3 | 85.8 |
| G (m2·ha−1) | 6.3–40.1 | 24.9 | 8.3 | 6.3–40.1 | 25.1 | 9.6 | 8.5–35.2 | 24.8 | 7.1 |
| V (m3·ha−1) | 22.9–352.4 | 191.0 | 82.1 | 22.9–352.4 | 182.3 | 100.7 | 44.3–284.6 | 199.2 | 60.8 |
| AGB (Mg·ha−1) | 20.1–138.2 | 80.7 | 30.9 | 20.1–138.2 | 79.0 | 37.3 | 27.4–130.8 | 81.6 | 24.1 |
| Metrics | Description | |
|---|---|---|
| Standard metrics | ||
| Height-based | Height percentiles (H25, H50, H75, H95) | The percentiles of the canopy height distributions (25th, 50th, 75th, and 95th) above 2 m. |
| Mean height (Hmean) | Mean of return heights above 2 m. | |
| Coefficient of variation of heights (Hcv) | Variation of heights of LiDAR returns above 2 m. | |
| Maximum height (Hmax) | Maximum of return heights above 2 m. | |
| Density-based | Canopy return density (D3, D5, D7, D9) | The proportion of points above the quantiles (30th, 50th, 70th, and 90th) to total number of points above 2 m. |
| Canopy cover | Canopy cover above mean height (CC2m) | Percentages of LiDAR return heights above 2 m. |
| Canopy cover above mean height (CCmean) | Percentages of LiDAR return heights above average point cloud height. | |
| Canopy metrics | ||
| Canopy volume | Open and closed gap zones of canopy volume metric (CVM) (i.e., Open and Closed) | The “Empty” voxels were located above and below the canopy, respectively. |
| Euphotic and oligophotic zones of CVM (i.e., Euph and Oligo) | The voxels located within an uppermost percentile (65%) of all filled grid cells of that column, and voxels located below the point in the profile, respectively. | |
| Weibull-fitted | Parameter α and β of Weibull distribution | The scale parameter α and shape parameter β of the Weibull density distribution fitted to the canopy height distribution (CHD). |
| Attributes | Predictive Models | R2 | Adj-R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|---|
| DBHlidar | exp(−1.02 × lnD3 + 1.12 × lnD5 + 0.40 × lnClosed + 3.75) × 1.029 | 0.72 | 0.69 | 4.57 | 19.92 |
| Hlidar | exp(−0.55 × lnH75 + 1.45 × lnH95 + 0.09 × lnClosed + 0.33) ×1.001 | 0.92 | 0.91 | 1.91 | 9.03 |
| Dlidar | exp(−0.33 × lnH95 + 0.41 × lnD5 − 0.14 × lnD9 + 6.86) ×1.027 | 0.61 | 0.58 | 117.76 | 24.29 |
| Glidar | exp(0.41 × lnH95 + 0.28 × lnD7 − 0.11 × lnD9 + 1.93) × 1.017 | 0.69 | 0.66 | 4.58 | 18.36 |
| Vlidar | exp(0.98 × lnH95 + 0.19 × lnD5 + 0.17 × lnOpen + 2.72) × 1.016 | 0.81 | 0.79 | 26.81 | 14.04 |
| AGBlidar | exp(0.71 × lnH95 + 0.17 × lnD5 − 0.05 × lnD9 + 2.14) × 1.016 | 0.73 | 0.71 | 15.87 | 19.75 |
| DBHDAP | exp(−0.48 × lnD5 + 0.21 × lnD7 + 0.73 × lnClosed + 3.77) × 1.047 | 0.60 | 0.57 | 5.17 | 22.52 |
| HDAP | exp(0.17 × lnH25 + 0.89 × lnH95 − 0.35 × lnD3 − 0.21) × 1.005 | 0.85 | 0.83 | 2.60 | 12.20 |
| DDAP | exp(0.68 × lnD3 − 0.16 × lnD7 + 0.45 × lnOligo + 6.73) × 1.042 | 0.56 | 0.52 | 125.28 | 25.84 |
| GDAP | exp(0.83 × lnHmean + 0.28 × lnOligo + 0.33 × lnα + 1.68) × 1.021 | 0.66 | 0.63 | 4.79 | 19.22 |
| VDAP | exp(1.53 × lnH95 + 0.45 × lnD3 − 0.60 × lnClosed + 0.13) × 1.028 | 0.73 | 0.70 | 34.84 | 18.24 |
| AGBDAP | exp(1.06 × lnHmean − 0.27 × lnClosed + 0.26 × lnα + 1.46) × 1.020 | 0.67 | 0.65 | 17.42 | 21.68 |
| DBHL-D | exp(0.80 × lnH95L + 0.11 × lnClosedL + 0.07 × lnβD + 0.75) × 1.021 | 0.75 | 0.73 | 4.26 | 16.64 |
| HL-D | exp(0.94 × lnH95L − 0.07 × lnD3L − 0.05 × lnOpenD + 0.04) × 1.001 | 0.95 | 0.95 | 1.60 | 7.20 |
| D L-D | exp(0.44 × lnD3L − 0.10 × lnD9L − 0.31 × lnH75D + 6.84) × 1.022 | 0.70 | 0.68 | 108.58 | 22.40 |
| GL-D | exp(0.35 × lnH95L + 0.21 × lnD7L + 0.24 × lnβD + 2.15) × 1.015 | 0.73 | 0.72 | 4.51 | 18.09 |
| V L-D | exp(0.98 × lnH95L + 0.19 × lnD5L + 0.17 × lnOpenD + 2.72) × 1.012 | 0.86 | 0.85 | 22.87 | 11.21 |
| AGBL-D | exp(0.66 × lnH95L + 0.15 × lnD5L + 0.14 × lnβD + 2.31) × 1.015 | 0.77 | 0.76 | 15.19 | 18.51 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. https://0-doi-org.brum.beds.ac.uk/10.3390/f10020145
Cao L, Liu H, Fu X, Zhang Z, Shen X, Ruan H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests. 2019; 10(2):145. https://0-doi-org.brum.beds.ac.uk/10.3390/f10020145
Chicago/Turabian StyleCao, Lin, Hao Liu, Xiaoyao Fu, Zhengnan Zhang, Xin Shen, and Honghua Ruan. 2019. "Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests" Forests 10, no. 2: 145. https://0-doi-org.brum.beds.ac.uk/10.3390/f10020145