
Precious Tree Pest Identification with Improved Instance Segmentation Model in Real Complex Natural Environments
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Dataset
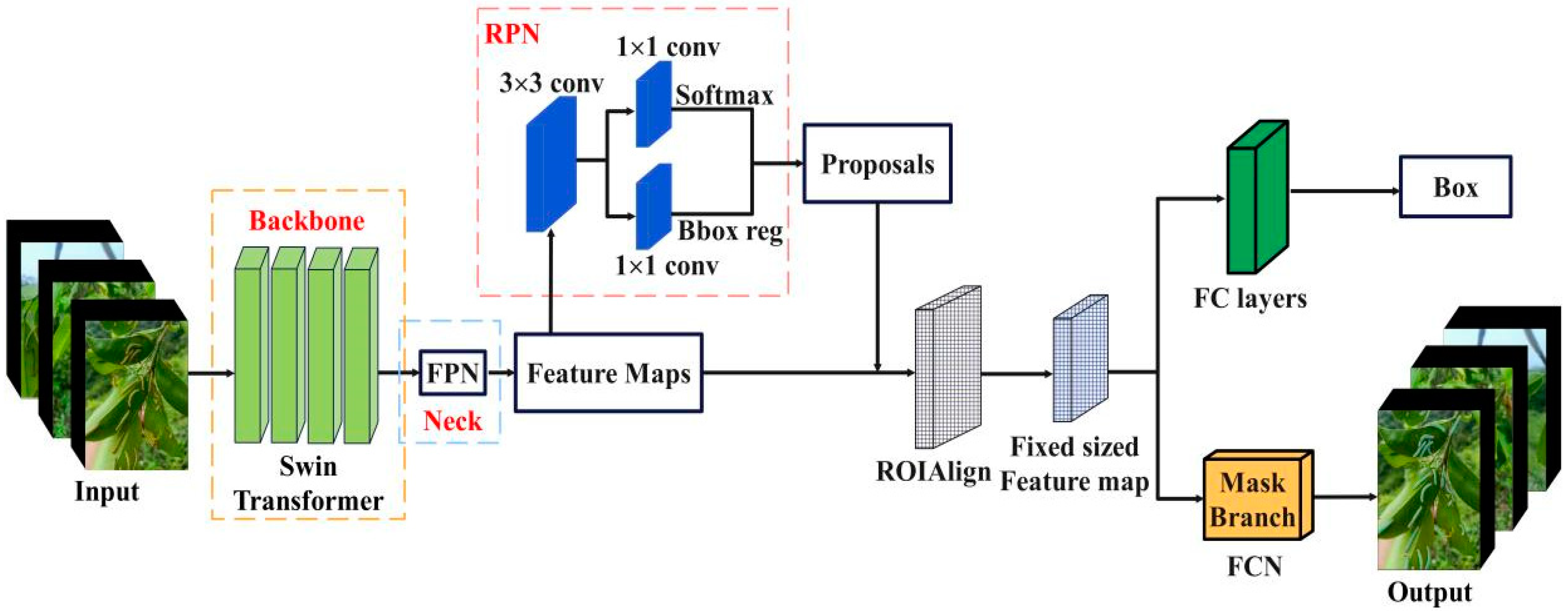
2.2. Instance Segmentation Method of Larva Based on Improved Mask RCNN
2.2.1. Model Construction
2.2.2. Extraction of Features Based on SWIN Transformer and FPN
2.2.3. ROI Alignment and Region of Interest (ROI) Generation
2.2.4. Pest Instance Segmentation and Loss Function
2.3. Network Training
2.4. Evaluation of the Performance of the Network Model
3. Results
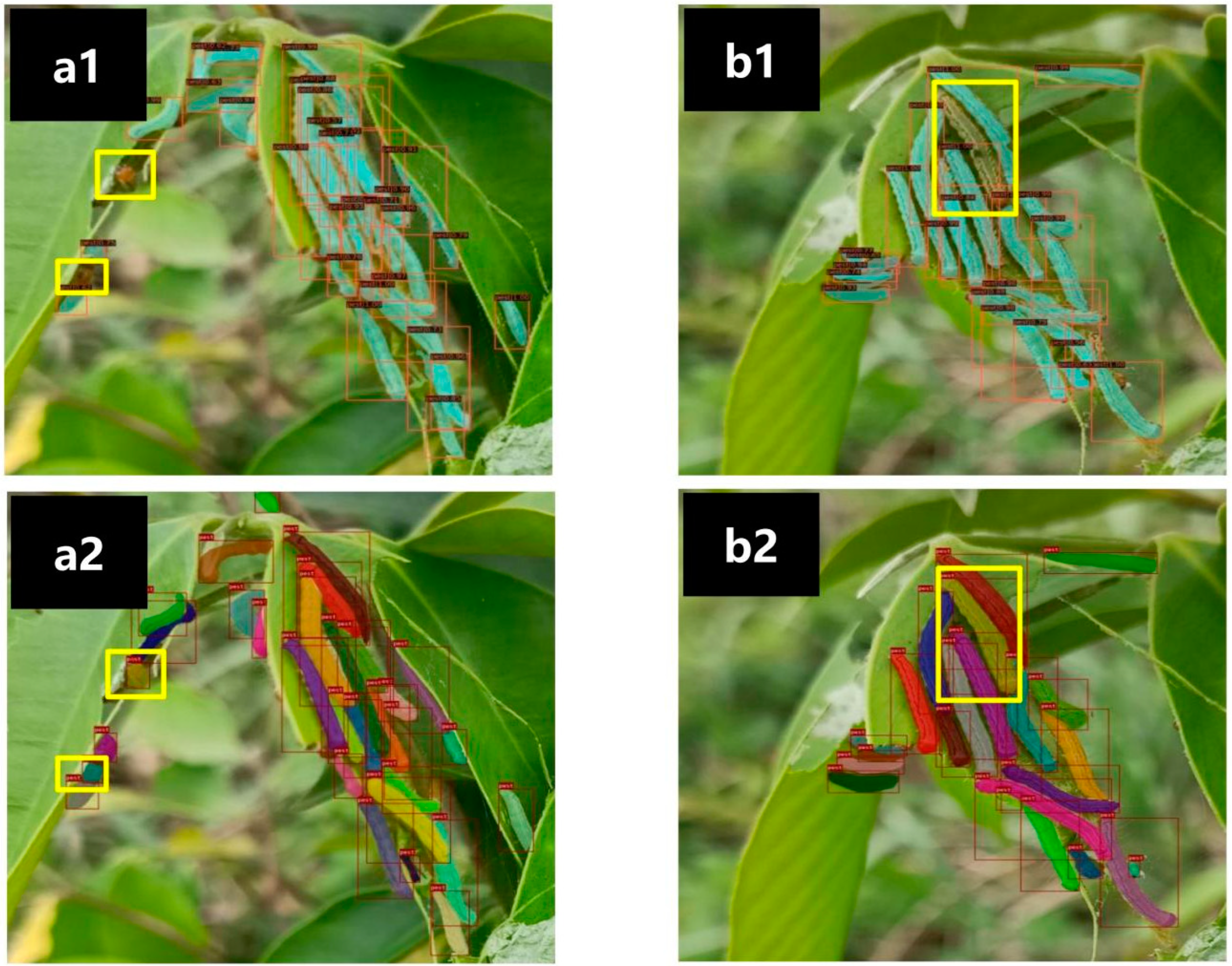
3.1. Instance Segmentation of Pests
3.2. Comparison with Other Instance Segmentation Methods
4. Discussion
4.1. Analysis of the Results of Pest Segmentation
4.2. Results of Adding SWIN Transformer to Pest Segmentation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Waters, W.E.; Stark, R.W. Forest pest management: Concept and reality. Annu. Rev. Entomol. 1980, 25, 479–509. [Google Scholar] [CrossRef]
- Ding, W.; Taylor, G. Automatic moth detection from trap images for pest management. Comput. Electron. Agric. 2016, 123, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Liu, X.; Yuan, M.; Ren, L.; Wang, J.; Chen, Z. Automatic in-trap pest detection using deep learning for pheromone-based Dendroctonus valens monitoring. Biosyst. Eng. 2018, 176, 140–150. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, L.; Huang, Y.; Liu, C. A review of key techniques of vision-based control for harvesting robot. Comput. Electron. Agric. 2016, 127, 311–323. [Google Scholar] [CrossRef]
- Marini, L.; Ayres, M.P.; Jactel, H. Impact of Stand and Landscape Management on Forest Pest Damage. Annu. Rev. Entomol. 2022, 67, 181–199. [Google Scholar] [CrossRef]
- Solis-Sánchez, L.O.; Castañeda-Miranda, R.; García-Escalante, J.J.; Torres-Pacheco, I.; Guevara-González, R.G.; Castañeda-Miranda, C.L.; Alaniz-Lumbreras, P.D. Scale invariant feature approach for insect monitoring. Comput. Electron. Agric. 2011, 75, 92–99. [Google Scholar] [CrossRef]
- Xia, C.; Lee, J.-M.; Li, Y.; Chung, B.-K.; Chon, T.-S. In situ detection of small-size insect pests sampled on traps using multifractal analysis. Opt. Eng. 2012, 51, 1–13. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Khoshtaghaza, M.H.; Minaei, S.; Jamshidi, B. Vision-based pest detection based on SVM classification method. Comput. Electron. Agric. 2017, 137, 52–58. [Google Scholar] [CrossRef]
- Tsaftaris, S.A.; Minervini, M.; Scharr, H. Machine learning for plant phenotyping needs image processing. Trends Plant Sci. 2016, 21, 989–991. [Google Scholar] [CrossRef] [Green Version]
- Fuentes, A.; Yoon, S.; Park, D.S. Deep learning-based techniques for plant diseases recognition in real-field scenarios. In Proceedings of the International Conference on Concepts for Intelligent Vision Systems, Auckland, New Zealand, 10–14 February 2020; Volume 12002, pp. 3–14. [Google Scholar]
- Yang, D.; Li, S.; Peng, Z.; Wang, P.; Wang, J.; Yang, H. MF-CNN: Traffic flow prediction using convolutional neural network and multi-features fusion. IEICE Trans. Inf. Syst. 2019, 102, 1526–1536. [Google Scholar] [CrossRef]
- Sundararajan, S.K.; Sankaragomathi, B.; Priya, D.S. Deep belief CNN feature representation based content based image retrieval for medical images. J. Med. Syst. 2019, 43, 1–9. [Google Scholar] [CrossRef]
- Melnyk, P.; You, Z.; Li, K. A high-performance CNN method for offline handwritten Chinese character recognition and visualization. Soft Comput. 2020, 24, 7977–7987. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Mi, Y.; Li, G.; Ju, Z. CNN-based facial expression recognition from annotated rgb-d images for human–robot interaction. Int. J. Hum. Robot. 2019, 16, 1941002. [Google Scholar] [CrossRef]
- Kumar, S.; Singh, S.K. Occluded thermal face recognition using bag of CNN ($ Bo $ CNN). IEEE Signal Processing Lett. 2020, 27, 975–979. [Google Scholar] [CrossRef]
- Li, R.; Wang, R.; Xie, C.; Liu, L.; Zhang, J.; Wang, F.; Liu, W. A coarse-to-fine network for aphid recognition and detection in the field. Biosyst. Eng. 2019, 187, 39–52. [Google Scholar] [CrossRef]
- Thenmozhi, K.; Reddy, U.S. Crop pest classification based on deep convolutional neural network and transfer learning. Comput. Electron. Agric. 2019, 164, 104906. [Google Scholar] [CrossRef]
- Qiao, Y.; Truman, M.; Sukkarieh, S. Cattle segmentation and contour extraction based on Mask R-CNN for precision livestock farming. Comput. Electron. Agric. 2019, 165, 104958. [Google Scholar] [CrossRef]
- Li, W.; Zheng, T.; Yang, Z.; Li, M.; Sun, C.; Yang, X. Classification and detection of insects from field images using deep learning for smart pest management: A systematic review. Ecol. Inform. 2021, 66, 101460. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE international conference on computer vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Khan, M.A.; Akram, T.; Zhang, Y.-D.; Sharif, M. Attributes based skin lesion detection and recognition: A mask RCNN and transfer learning-based deep learning framework. Pattern Recognit. Lett. 2021, 143, 58–66. [Google Scholar] [CrossRef]
- Jia, W.; Tian, Y.; Luo, R.; Zhang, Z.; Lian, J.; Zheng, Y. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput. Electron. Agric. 2020, 172, 105380. [Google Scholar] [CrossRef]
- Cordonnier, J.; Loukas, A.; Jaggi, M. On the relationship between self-attention and convolutional layers. In Proceedings of the The International Conference on Learning Representations, Addis Ababa, Ethiopia, 30 April 2020. [Google Scholar]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual attention network for scene segmentation. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, Long Beach, CA, USA, 15–20 June 2019; Volume 3146, pp. 3146–3154. [Google Scholar]
- Wang, X.; Girshick, R.; Gupta, A.; He, K. Non-local neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7794–7803. [Google Scholar]
- Fu, J.; Liu, J.; Jiang, J.; Li, Y.; Bao, Y.; Lu, H. Scene segmentation with dual relation-aware attention network. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 2547–2560. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Huang, L.; Guo, J.; Zhang, C.; Chen, X.; Wang, J. Ocnet: Object context network for scene parsing. arXiv 2018, arXiv:1809.00916. [Google Scholar]
- Zhao, H.; Zhang, Y.; Liu, S.; Shi, J.; Loy, C.C.; Lin, D.; Jia, J. Psanet: Point-wise spatial attention network for scene parsing. In Proceedings of the European conference on computer vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 267–283. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems: Annual Conference on Neural Information Processing Systems 2017, Long Beach, CA, USA, 4–9 December 2017; p. 30. [Google Scholar]
- Chen, J.; Lu, Y.; Yu, Q.; Luo, X.; Adeli, E.; Wang, Y.; Lu, L.; Yuille, A.L.; Zhou, Y. Transunet: Transformers make strong encoders for medical image segmentation. arXiv 2021, arXiv:2102.04306. [Google Scholar]
- Li, H.; Yang, F.; Zhao, Y.; Xing, X.; Zhang, J.; Gao, M.; Huang, J.; Wang, L.; Yao, J. DT-MIL: Deformable Transformer for Multi-instance Learning on Histopathological Image. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Strasbourg, France, 27 September–1 October 2021; Volume 12908, pp. 206–216. [Google Scholar]
- Yu, S.; Ma, K.; Bi, Q.; Bian, C.; Ning, M.; He, N.; Li, Y.; Liu, H.; Zheng, Y. Mil-vt: Multiple instance learning enhanced vision transformer for fundus image classification. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Strasbourg, France, 27 September–1 October 2021; Volume 12908, pp. 45–54. [Google Scholar]
- Shao, Z.; Bian, H.; Chen, Y.; Wang, Y.; Zhang, J.; Ji, X. Transmil: Transformer based correlated multiple instance learning for whole slide image classification. Adv. Neural Inf. Processing Syst. 2021, 34, 2136–2147. [Google Scholar]
- Xu, Y.; Zhu, J.-Y.; Chang, E.; Tu, Z. Multiple clustered instance learning for histopathology cancer image classification, segmentation and clustering. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 964–971. [Google Scholar]
- Wang, H.; Zhu, Y.; Green, B.; Adam, H.; Yuille, A.; Chen, L.-C. Axial-deeplab: Stand-alone axial-attention for panoptic segmentation. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Volume 12349, pp. 108–126. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Jiang, K.B.; Zhu, W.J.; Pan, W.; He, Z.D.; Zhu, B.Z. Genetic Diversity Analysis of Agarwood Agarwood Based on SRAP Markers. J. Cent. South Univ. For. Technol. 2020, 40, 131–136. [Google Scholar]
- Pang, S.J.; Zhang, P.; Yang, B.G.; Liu, S.L.; Deng, S.K.; Feng, C.L. Effects of gap size on the growth and development of artificially regenerated saplings of Agarwood agarwood. J. Northwest AF Univ. 2020, 48, 83–88. [Google Scholar]
- Zhang, X.X. Research progress on the development and utilization of Agarwood. Shelter. For. Sci. Technol. 2020, 4, 63–66. [Google Scholar]
- Song, X.C.; Wang, X.Y.; Yang, G.; Huang, G.H.; Zhou, Z.Z.; Liang, K.N.; Zhang, Q.Q. Induction of Agarwood incense formation by mixing inorganic salts and hormones. For. Sci. 2020, 56, 121–130. [Google Scholar]
- Hong, R.H.; Yin, J.F.; Chen, Y.; Xu, J.H.; Huang, X.Q. Research progress on the important pest of Pseudomonas japonica. Trop. For. 2019, 47, 66–68. [Google Scholar]
- Wang, Z.; Xie, W.Z.; Zhu, C.Q.; Lu, X.L.; Cao, C.L.; Wen, X.J. Emergence and reproductive behavior rhythm of the yellow leaf borer. China For. Dis. Insects 2018, 37, 24–27. [Google Scholar]
- Mao, Y.T.; Zhang, M.; Jin, X.F.; Ma, T.; Wang, C.; Sun, Z.H.; Chen, X.Y.; Li, Y.Z.; Wen, X.J. Study on the resistance of Agarwood vulgaris to Yellow leaf borer. J. South China Agric. Univ. 2017, 38, 89–96. [Google Scholar]
- Torralba, A.; Russell, B.C.; Yuen, J. Labelme: Online image annotation and applications. Proc. IEEE 2010, 98, 1467–1484. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems 28: Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, Canada, 7–12 December 2015; p. 28. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European conference on computer vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Tian, Y.; Yang, G.; Wang, Z.; Li, E.; Liang, Z. Instance segmentation of apple flowers using the improved mask R–CNN model. Biosyst. Eng. 2020, 193, 264–278. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weather | Condition | Morphology of Pests | Number of Training Images | Number of Test Images |
|---|---|---|---|---|
| Sunny | Direct sunlight | little pests | 55 | 12 |
| overlapping | 52 | 11 | ||
| hidden by foliage and branches | 59 | 13 | ||
| uneven | 53 | 12 | ||
| Backlight | little pests | 50 | 15 | |
| overlapping | 52 | 12 | ||
| hidden by foliage and branches | 50 | 10 | ||
| uneven | 55 | 12 | ||
| Cloudy | Direct sunlight | little pests | 55 | 12 |
| overlapping | 52 | 12 | ||
| hidden by foliage and branches | 55 | 13 | ||
| uneven | 53 | 11 | ||
| Backlight | little pests | 53 | 12 | |
| overlapping | 53 | 14 | ||
| hidden by foliage and branches | 51 | 15 | ||
| uneven | 55 | 12 | ||
| Total | 798 | 198 |
| Conditions | SL | MNL | OL | SAL | MCL |
|---|---|---|---|---|---|
| precision(%) | 94.85 | 94.4 | 86.6 | 83.9 | 83.3 |
| recall(%) | 96.65 | 97.2 | 89.2 | 88.3 | 87.2 |
| F1(%) | 96.0 | 96.0 | 87.9 | 86.0 | 85.2 |
| Method | Precision (%) | Recall (%) | F1 (%) |
|---|---|---|---|
| MT | 87.23 | 90.95 | 89.03 |
| MR50 | 76.45 | 79.90 | 74.70 |
| MR101 | 77.20 | 81.30 | 74.65 |
| Method | Model Size (MB) | GFLOPs | Parameters |
|---|---|---|---|
| MT | 180 | 135.38 | 47.37 |
| MR50 | 168 | 329.33 | 43.75 |
| MR101 | 240 | 481.48 | 62.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Gao, J.; Wang, X.; Jia, H.; Wang, Y.; Zeng, Y.; Tian, X.; Mu, X.; Chen, Y.; OuYang, X. Precious Tree Pest Identification with Improved Instance Segmentation Model in Real Complex Natural Environments. Forests 2022, 13, 2048. https://0-doi-org.brum.beds.ac.uk/10.3390/f13122048
Guo Y, Gao J, Wang X, Jia H, Wang Y, Zeng Y, Tian X, Mu X, Chen Y, OuYang X. Precious Tree Pest Identification with Improved Instance Segmentation Model in Real Complex Natural Environments. Forests. 2022; 13(12):2048. https://0-doi-org.brum.beds.ac.uk/10.3390/f13122048
Chicago/Turabian StyleGuo, Ying, Junjia Gao, Xuefeng Wang, Hongyan Jia, Yanan Wang, Yi Zeng, Xin Tian, Xiyun Mu, Yan Chen, and Xuan OuYang. 2022. "Precious Tree Pest Identification with Improved Instance Segmentation Model in Real Complex Natural Environments" Forests 13, no. 12: 2048. https://0-doi-org.brum.beds.ac.uk/10.3390/f13122048