1. Introduction
As in most geophysical methods, as well as in gravity prospecting, the inversion of field data is the most advanced step to be undertaken in order to reconstruct a physical model of the subsoil investigated. The importance of this step is clearly evident, as it constitutes a necessary path in many problems of practical nature, such as the mapping of geo-structures in tectonic and geodynamical studies, hydrocarbon, mineral and geothermal resource exploration, as well shallow-depth engineering and archaeological investigations, mainly in the reconnaissance phase of these applications.
Classically, the approach used in gravity inversion is the direct determination of the 3D distribution of density contrasts, in the subsurface, with both linear and non-linear methods [
1]. Within this deterministic approach, many researchers have proposed noteworthy variants, such as, e.g., Monte Carlo simulation techniques [
2], 3D inversion based on an a priori covariance model [
3], and stochastic inversion techniques [
4,
5]. All these classical methods need to impose a priori constraints to regularize the inversion [
6,
7,
8]. A regularization term enables them to yield a smooth or sharp model [
9]. In [
10,
11,
12], a compact and sharper image of the subsurface has been developed through a focusing method. In addition, [
13,
14,
15,
16] applied a fuzzy
c-means clustering algorithm to induce the recovered physical properties to gather around clusters determined by some a priori information.
The aim of this paper is to present a new 3D data-adaptive, fast gravity inversion method, directly derived from the principles of the gravity probability tomography (GPT) [
17,
18]. Probability tomography, originally formulated for the self-potential method [
19,
20], is aimed at virtually exploring the subsoil in the search for the most probable location of the sources of the anomalies that appear in a datum domain. In gravity, a source of anomaly is a body showing a non-vanishing density contrast with respect to the reference crustal density. The GPT method is, however, intrinsically unable to give estimates of the density contrasts. In target-oriented applications, this aspect may not be a serious shortage if information on the density of the target body is not as important as its position and shape. Gravity data have been interpreted on this semi-quantitative basis in some Italian volcanic areas [
21,
22]. However, in many practical problems, mainly in shallow-depth investigations, information on the density value distribution in the subsoil is necessary and cannot be disregarded. To comply with this essential task and, at the same time, to take advantage of the probability tomography peculiarities, the GPT method has recently been used to provide confident geometrical constraints within a gravity full inversion program [
23].
The intention is, now, to develop a fast Probability-based Earth Density Tomography Inversion (PEDTI), strictly relying on the available dataset, without requiring a priori information. The problem of equivalence (non-uniqueness) of solutions, by which gravity analysis is strongly influenced [
24], is also addressed. The PEDTI method is developed following the conceptual steps previously formulated for the probability-based electrical resistivity tomography (PERTI) inversion method [
25]). In this article, we will expose the idea behind the theory, as well as the application principles using relatively simple synthetic cases, which we retain enough to clarify all the key steps of the PEDTI method.
2. Outline of the GPT Theory
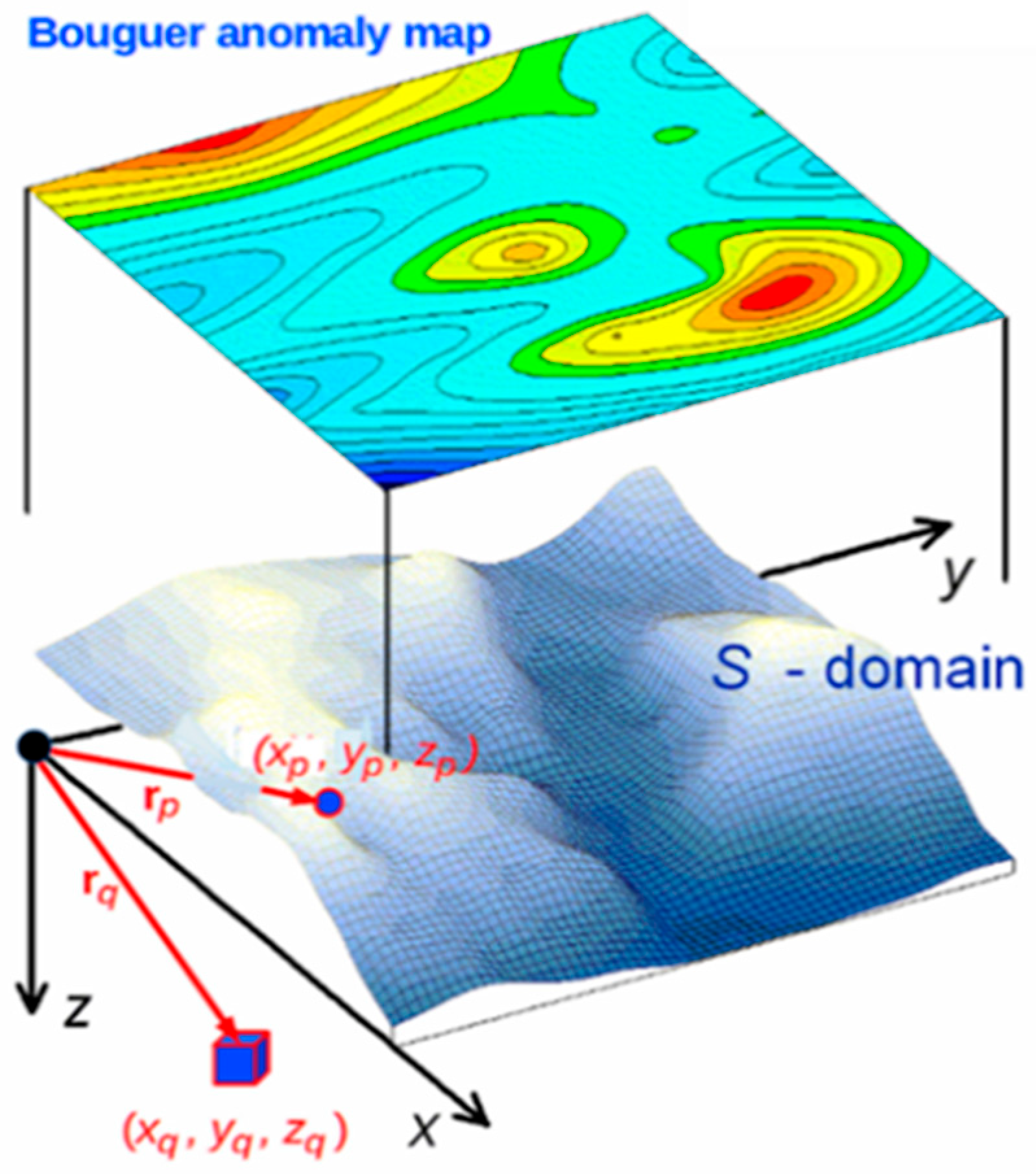
Assuming a reference system with the horizontal (
x,
y)-plane placed at mean sea level and the
z-axis positive downwards, the gravity datum domain, generally, is a non-flat ground survey area
S (
S-domain in
Figure 1). It is customary to plot the results of a gravity survey as a map of the Bouguer anomaly function experimentally determined at
P sites
rp∈
S (
p = 1, 2, …,
P) using the formula:
where
gz,ex(
rp) and
gz,th(
rp) are, respectively, the experimental (measured) and theoretical gravity vertical components at the same station point
rp ≡
xpi +
ypj +
zpk.
In gravity prospecting,
gz,th(
rp), either directly using the international GRS80 formula [
26] or a modification of it containing free-air, plate, and terrain corrections, relies on a reference density value
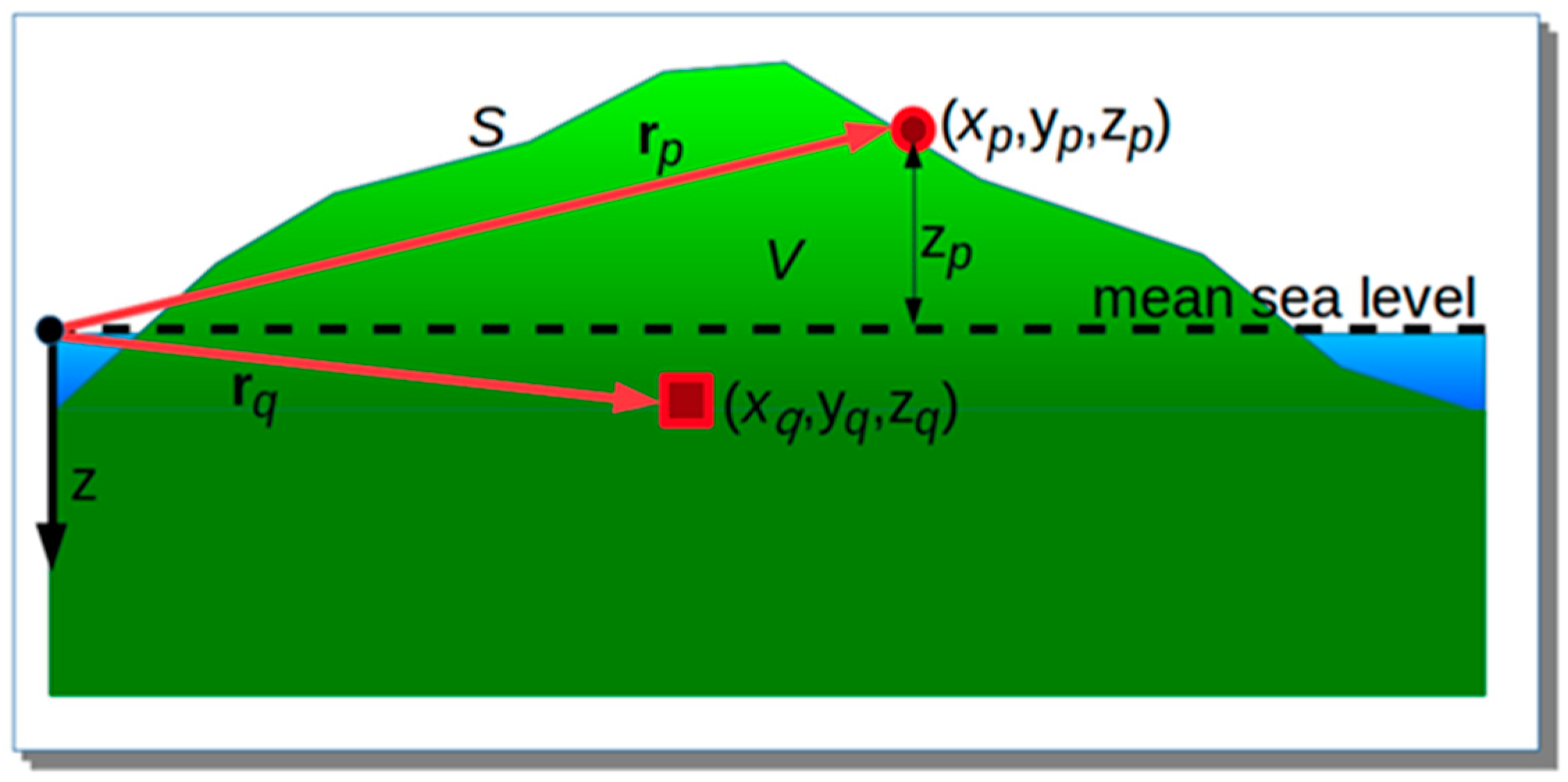
σo, generally assumed to be the average crustal density. To be more explicit, referring to the most common case of inland ground measurements, as sketched in
Figure 2, the formula currently used for
gz,th(
rp) is [
27]:
where
k1 = 5.3024 × 10
−3,
k2 = 5.8 × 10
−6 and, using SI units,
go = 9.780327 m/s
2,
σo = 2670 kg/m
3,
G = 6.6742 × 10
−11 m
3/s
2kg,
k3 = 3.086 × 10
−6 s
−2, with
zp in m.
In (2), the term 2
πGσo|zp| is the positive contribution of the slab confined between the mean sea level and the
pth station level (vanishes if
zp = 0). The term −
GσoTc(
zp) is, instead, the negative terrain correction, needed whenever lateral deviations from slab flatness cannot be neglected. For the calculation of
Tc(
zp) Messerschmidt’s formula is used [
28]. Finally, the term
−k3zp is the negative free-air correction needed to account for the altitude of the station site above sea level (vanishes if
zp = 0).
In the original GPT formulation [
17,
18], the
Ba(
rp) function was assumed to be of the type:
i.e., as a sum of signals from
Q elementary sources (poles), located in the subsoil in such a way as to generate an anomaly contour map such as in the top
Figure 1. In (3),
rq ≡
xqi +
yqj +
zqk is the position of the
qth pole (
q = 1, 2, …,
Q),
Γq is its strength equal to the gravitational constant
G times the differential mass Δ
mq concentrated at the centre, and
λ(
rp,
rq) is the so-called scanning function [
17,
18], given as:
Equation (3) is a convenient discretization of the most general Newtonian form:
The GPT theory starts by introducing a total information power
Λ, associated with
Ba(
rp), given as:
Additionally, (6) is a convenient discretization derived from the most general form of signal energy in the space-domain, previously used by [
17], i.e.,
Substituting from (3), (6) becomes:
Taking a generic
qth addendum from (8) and using Cauchy–Schwarz inequality property, it follows:
from which a Δ
mq-occurrence probability function
η(
rq), valid for 3D GPT, is at last derived as [
17]:
where:
The
η(
rq) is a normalised correlation function satisfying the condition: −1 ≤
η(
rq) ≤ +1. The GPT is, therefore, a fast imaging procedure of a set of
η(
rq) values, calculated at the nodes of a 3D grid (the tomospace), placed beneath the
S-domain. A positive value of
η(
rq) indicates a positive discrepancy of density at the point
rq, with respect to the reference density
σo, while a negative value is the result of a negative discrepancy of density at
rq. Contouring of all the
η(
rq) values allows the geometrical pattern of all the anomaly sources to be delineated. For the purposes of the PEDTI method we are going to develop, it is important to stress since now that the situation, in which
η(
rq) = 0, corresponds to zero density discrepancy at
rq. This situation will be assumed, as will be seen in the next
Section 3, as the nullity condition to be imposed point by point in the tomospace.
3. The 3D PEDTI Method
As stated in the introduction, the GPT method is unable to provide estimates of the true densities of the anomaly bodies. This limitation will now be overcome by the PEDTI approach. The idea underlying the PEDTI method is a straight consequence of the role given to the
η(
rq) function. Namely, if at a point
rq resulted in
η(
rq) = 0, then we can argue that the probability to find a positive or negative discrepancy of density, with respect to the prefixed reference crustal density
σo, should vanish. Hence, at that point, the true density is likely to be close to
σo. However, in general, in the presence of anomalies,
η(
rq) ≠ 0 occurs in most of the points in the tomospace. Therefore, in order to let the nullity condition be applicable, we can adopt, here, the same reasoning as that used for the PERTI method in geoelectrical data inversion [
25].
Therefore, the starting assumption for the PEDTI method is that the reference uniform density is no longer pre-assigned but assumed to be the unknown value
σq that corresponds to a generic
q-th cell of volume Δ
V centred at
rq. Recalling the definition (3), such an assumption allows
η(
rq) to be rewritten as:
where
GΔ
V(
σs−
σq) =
Γs corresponds to
Γq appearing in (3). Applying the nullity condition to
ηʹ(
rq), given that it is always
C(
rq) ≠ 0, from (12) we readily obtain:
Adding and subtracting the term
at the numerator of (13), at last, we obtain:
Equation (14) represents the basic formula of the PEDTI method. By changing rq, it would be possible, at least in principle, to retrieve a density pattern point by point in the subsoil. However, we point out that, after repeated trials, it has resulted that one may incur in an overestimation of the denominator in the ratio at the right-hand side of (14), which is ascribable to the absence of weighing factors of the scanning functions λ(rp,rs) (s = 1, …, Q). In retrieving σq, the result may be an underestimation of the value to add to or subtract from σo, depending on the sign of the numerator in the ratio at the right-hand side of (14). Apparently, there is no direct physical hypothesis that may lead us to overcome such a potential obstacle. A possibility is to make recourse to the principles of the fuzzy logic, which, among others, appears fully compatible with the probabilistic paradigm we have adopted.
As is well known, the fuzzy logic belongs to a polyvalent logic, which is an extension of the Boolean logic [
29]. It is related to the theory of blurry sets [
30], within which we think we can, in general, include any geophysical field datasets. In fuzzy logic, the degree of truth of a variable may be any real number between 0 and 1 [
29]. By degree of truth, we mean how true a property is, which can be, in addition to being true (=value 1) or false (=value 0) as in classical logic, partially true and partially false. Formally, this degree of truth is determined by an appropriate function assuming values between 0 and 1, endpoints included, which we identify, here, with the modulus of the occurrence probability function, i.e., |
η(
rq)|. For the use we are going to make, it seems more appropriate to speak of |
η(
rq)| as a function determining the degree of likeness, rather than the degree of truth.
In order to apply the nullity condition, we now propose a modification of the original
Ba(
rp) function by including a set of calibration functions
γ(
rp,
rq), one for each node
rq of the same 3D grid used for the calculation of
η(
rq), such that:
Of course, the calibration functions
γ(
rp,
rq) must have the same form as that describing the gravity effect of a source pole over the
S-domain, viz.:
where (
σq−
σo) is the unknown density contrast at
rq (
q = 1, …,
Q). In passing, we observe that the left-hand side of (15) corresponds to something such as an objective function in optimization problems.
To comply with the fuzzy logic, we now introduce an unknown background density contrast (
σ’−
σo), common to all cells of the tomospace, such that:
which means that, for calculating at each
rq of the density contrast (
σq−σo), we use the background value common to all cells in the tomospace, modulated by the degree of likeness function that corresponds to that point. Substituting (16) in (15) and using (17), an estimate of (
σ’−
σo) is readily obtained as:
which, thanks to (17), allows the density
σq to be derived at each
rq as:
Equation (19) represents the key formula of the PEDTI method. One can soon verify that, when putting |η(rq)| = 1, ∀q ϵ [1,Q], Equation (19) reduces to Equation (14).
In synthesis, the PEDTI approach does not need regularization based on a priori information. As known, regularization based on a priori information is usually introduced to eliminate higher frequency components in the solution, which cannot be constrained from the data. By the PEDTI approach, this problem is automatically avoided by the η-function in the modalities that are better explicated in the following.
Some further aspects are now worth addressing before discussing the resolution power of the PEDTI tool applied to a few simple synthetic cases. First, we observe that the sum of the calibration functions, γ(rp,rq) in (15), plays the role of reference model to compare with the observed Bouguer anomaly function Ba(rp). Conceptually, it plays the same role of the starting model in any standard deterministic inversion. The main difference is that it is fully self-constrained, and no external information is required. This means that neither body geometries nor depth and/or density a priori values need to be imposed. Indeed, the calibration scheme adopted here only connects to the occurrence probability function, which is elaborated on its turn, as seen, exclusively using the field dataset.
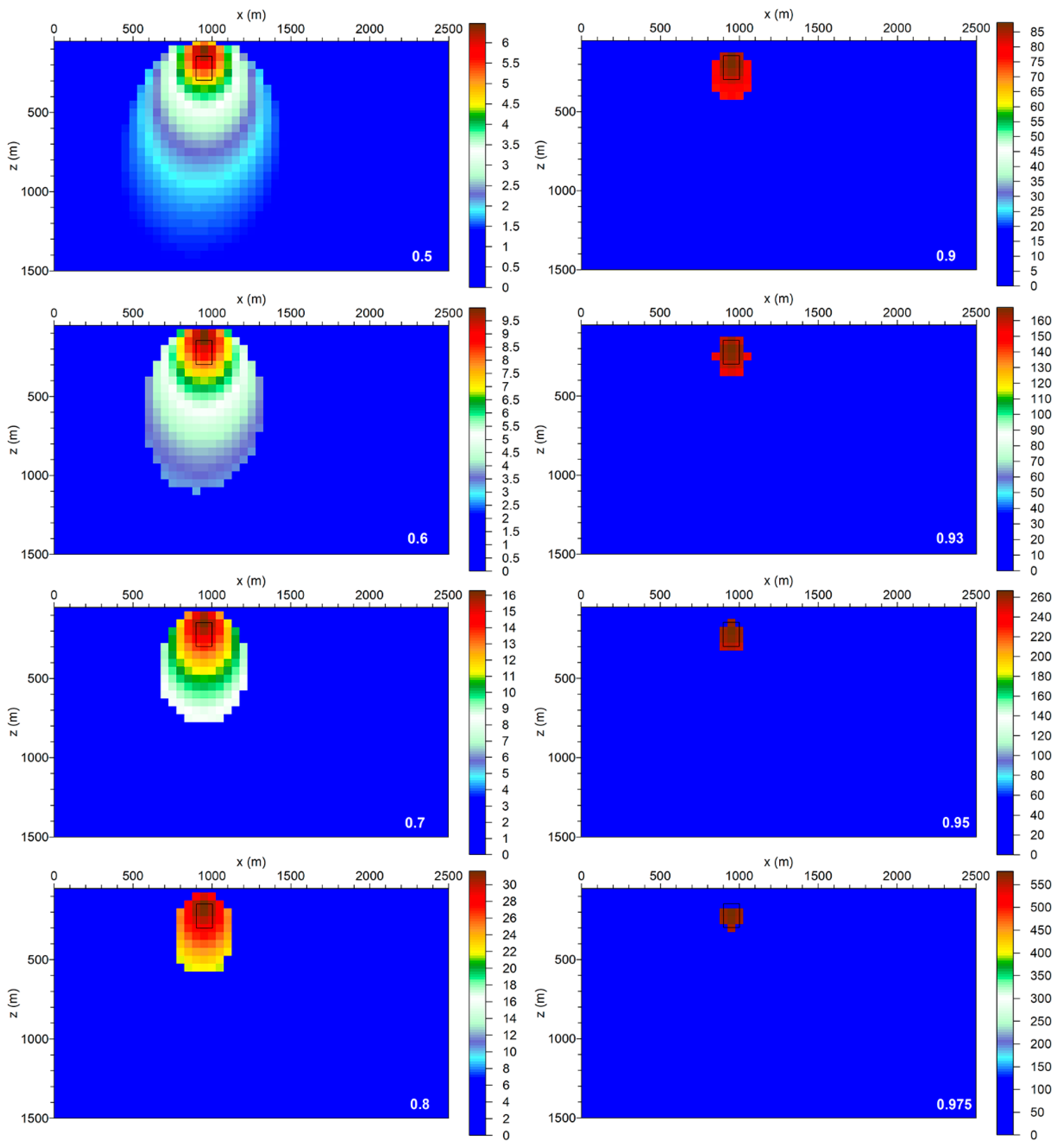
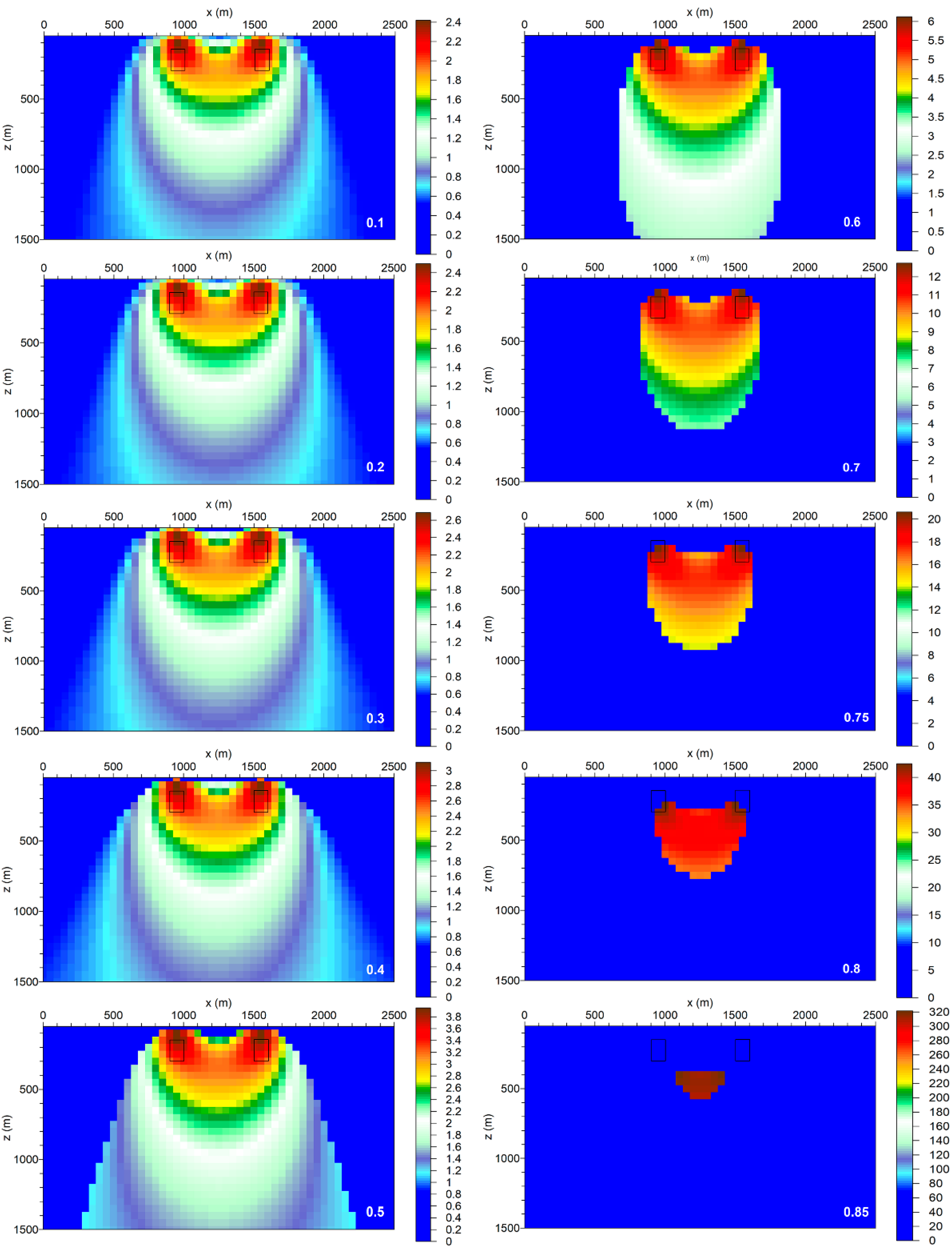
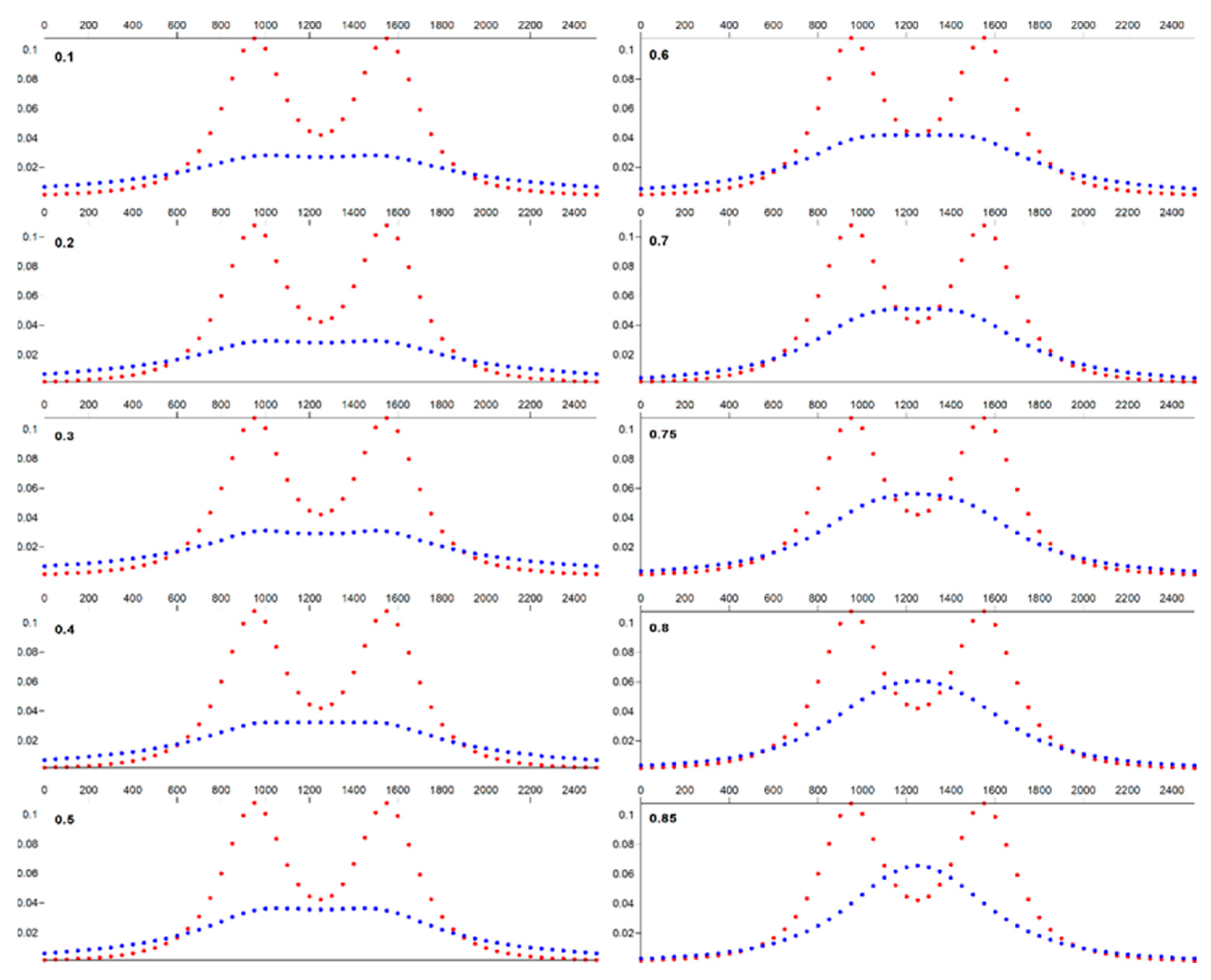
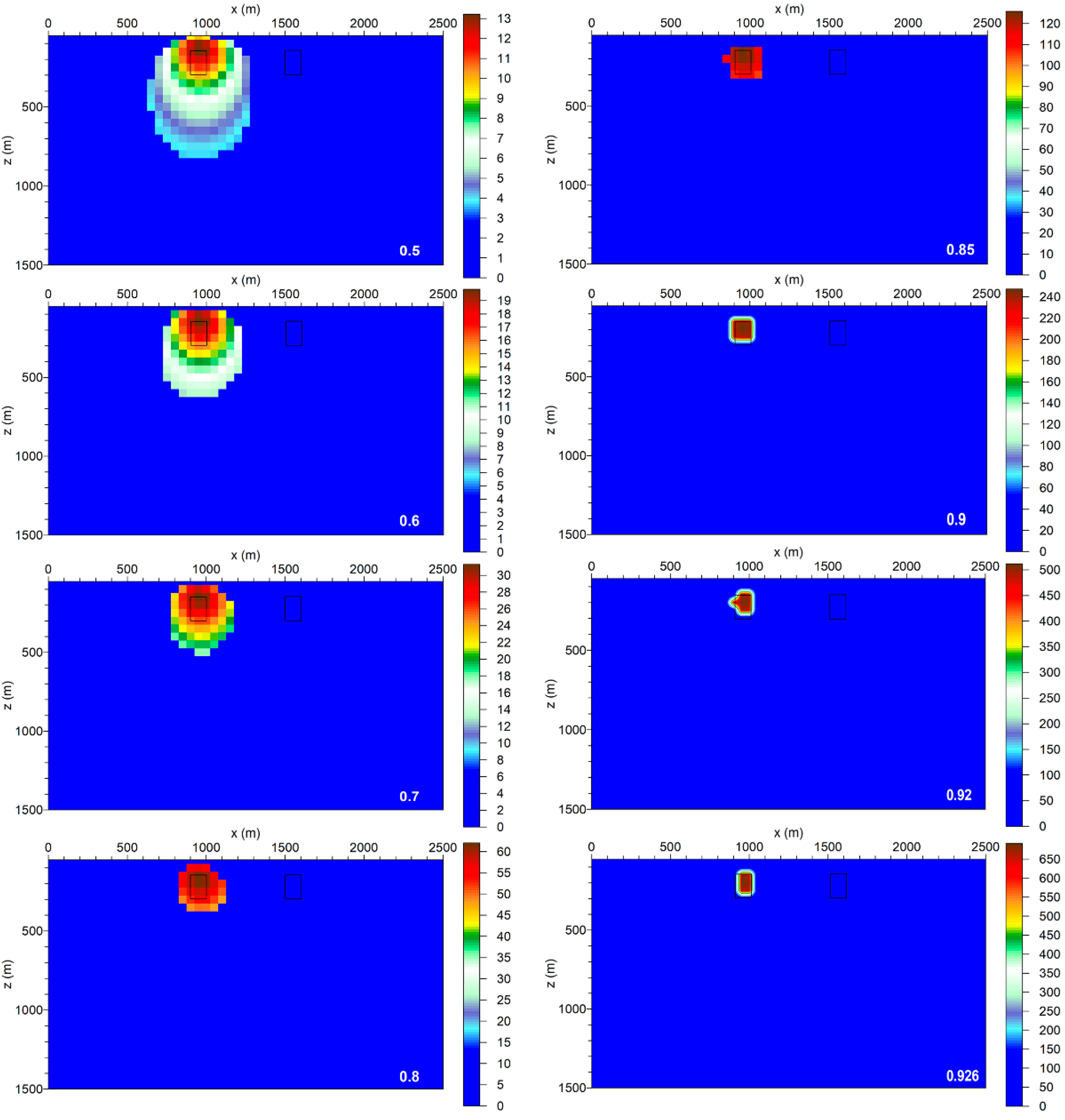
A second noteworthy aspect is how the modulus of the occurrence probability function η(rq) acts in the estimation of the density contrast in each cell of the tomospace. We observe that |η(rq)|, which, within the fuzzy logic we have adopted, takes the role of degree of likeness function, in Equation (19) acts in two distinct, independent ways. First, it appears as a multiplication factor of the entire ratio to the right and, therefore, through (18) brings us back to the starting position, expressed by (17), signifying the degree of likeness of the density contrast in the qth cell with the background value. Second, looking now at the inner sum at the denominator in Equation (19), |η(rq)| appears as a weighting factor of the scanner functions, and this opens to a dynamic PEDTI approach. For instance, to better focus on areas of the tomospace enclosing peaks of the occurrence probability function, one can cut the sum by dropping out all contributions with values of |η(rq)| lower than a prefixed threshold. Since this filtering approach can be repeated many times by increasing, at steps, the cut-off |η|-value, it can be very useful to inspect the degree of equivalence among the different solutions, as it will be shown later by the simulations.
A further important issue is the dependence of the estimate of σq on the volume element ΔV, which, in Equation (19), is assumed to be the same for all cells of the tomospace. The dependence of PEDTI, as well of any other inversion method on ΔV, is intrinsically unavoidable since gravity is a mass-contrast based method. The most neutral choice is assigning to ΔV the same value of the cubic voxel that is used to represent the regular grid in the 3D tomospace, whose side is the same as that of the square pixel used to represent the 2D Bouguer anomaly map. Ultimately, ΔV depends on the dataset resolution, i.e., on the amount of information it contains, according to the definition of signal power given by (6).
In conclusion, in the frame of this theory, σq must be intended as the density value showing the highest occurrence probability at rq, compatible with the nature of the dataset. In synthesis, by the PEDTI approach, one searches point by point for the value that the reference density should have to allow the occurrence probability of the anomaly source to locally vanish.
5. A Comparison between PEDTI and Classical Inversion
As documented in the previous sections, the PEDTI approach is a completely innovative gravity data inversion tool, which cannot be framed in the category of the classical deterministic inversion. It is worth recalling that, within this category, inversion is, in principle, an ill-posed problem, and regularization techniques must be introduced to try to overcome the non-uniqueness and ill-posedness obstacle [
35]. PEDTI, instead, is based on theoretical and logical assumptions that differ radically from those of the classical inversion. Most important of all, the PEDTI method does not require a priori information, or pre-packaged starting models, in order to work. This property makes it completely extraneous to the risk of any subjective presetting of the model on which the solution of the inversion must converge. The synthetic examples, discussed in
Section 4, showed that PEDTI is a stable inversion algorithm just because it does not require external assumptions to be regularized, nor does it need to be reformulated for numerical treatment.
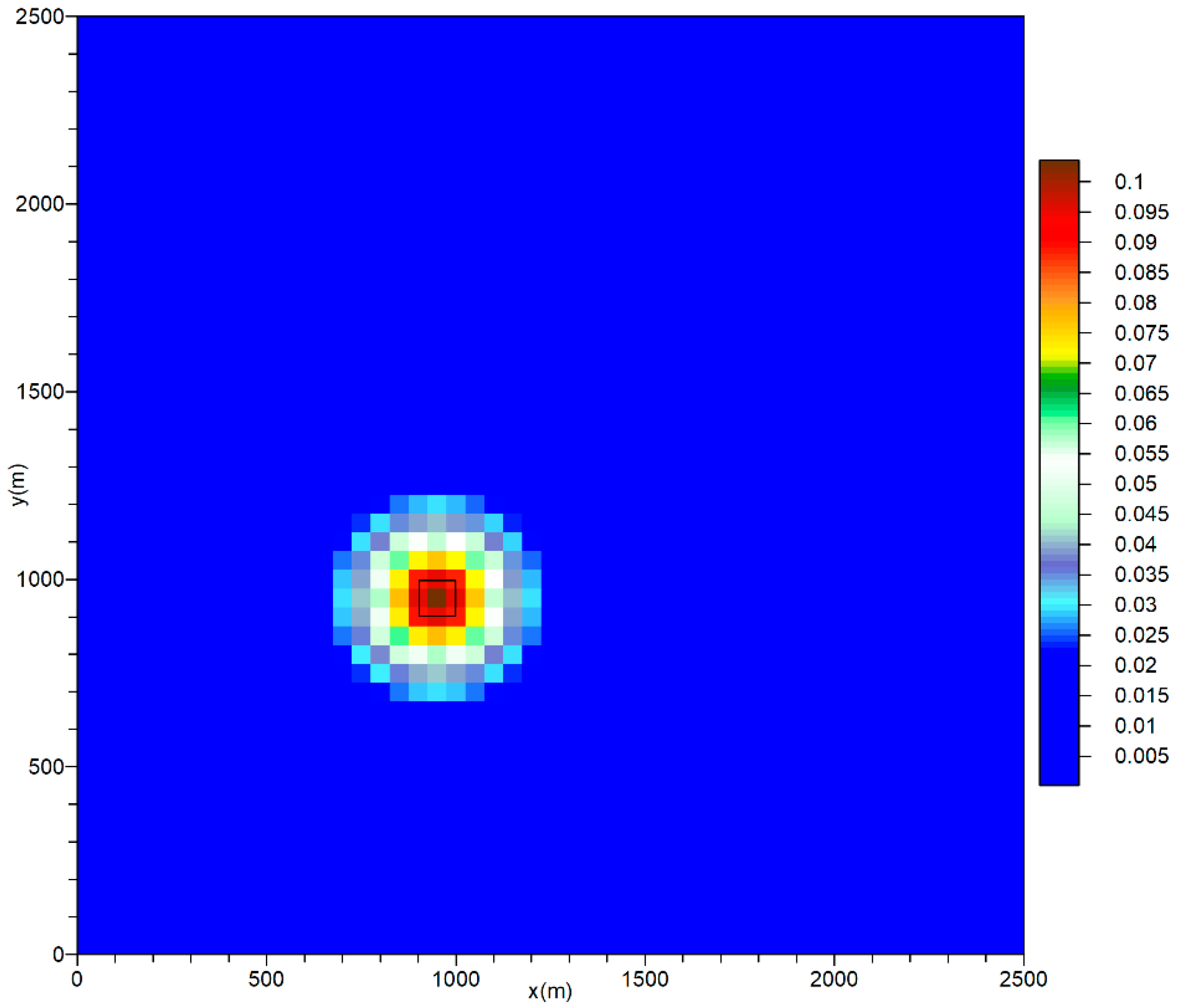
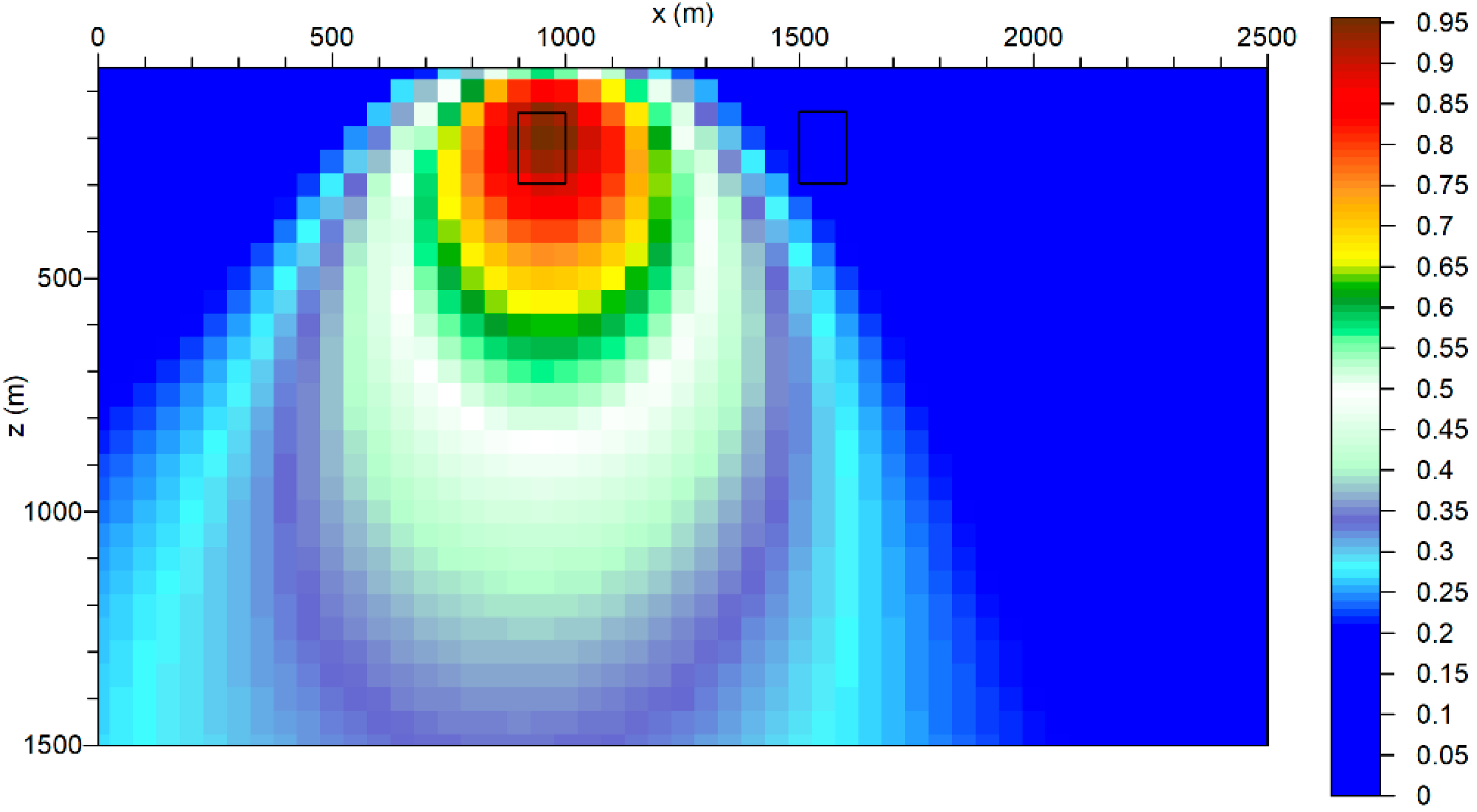
That said, it is now worth exposing a quick comparison, between our PEDTI approach and a classical deterministic inversion, in order to allow the reader to start to appreciate the benefits that PEDTI can offer. For this purpose, we consider the single prism model discussed in
Section 4.1 and the relative forward Bouguer anomaly map depicted in
Figure 3. For the comparison, the open source SimPEG software, in python programming language, was chosen (
https://github.com/simpeg/simpeg, accessed on 31 May 2022). To put the SimPEG method in the same starting condition as PEDTI, we supposed we had no a priori information about the nature of the target body. Therefore, as a starting model to trigger the convergence of SimPEG, we assumed a homogeneous and isotropic half-space.
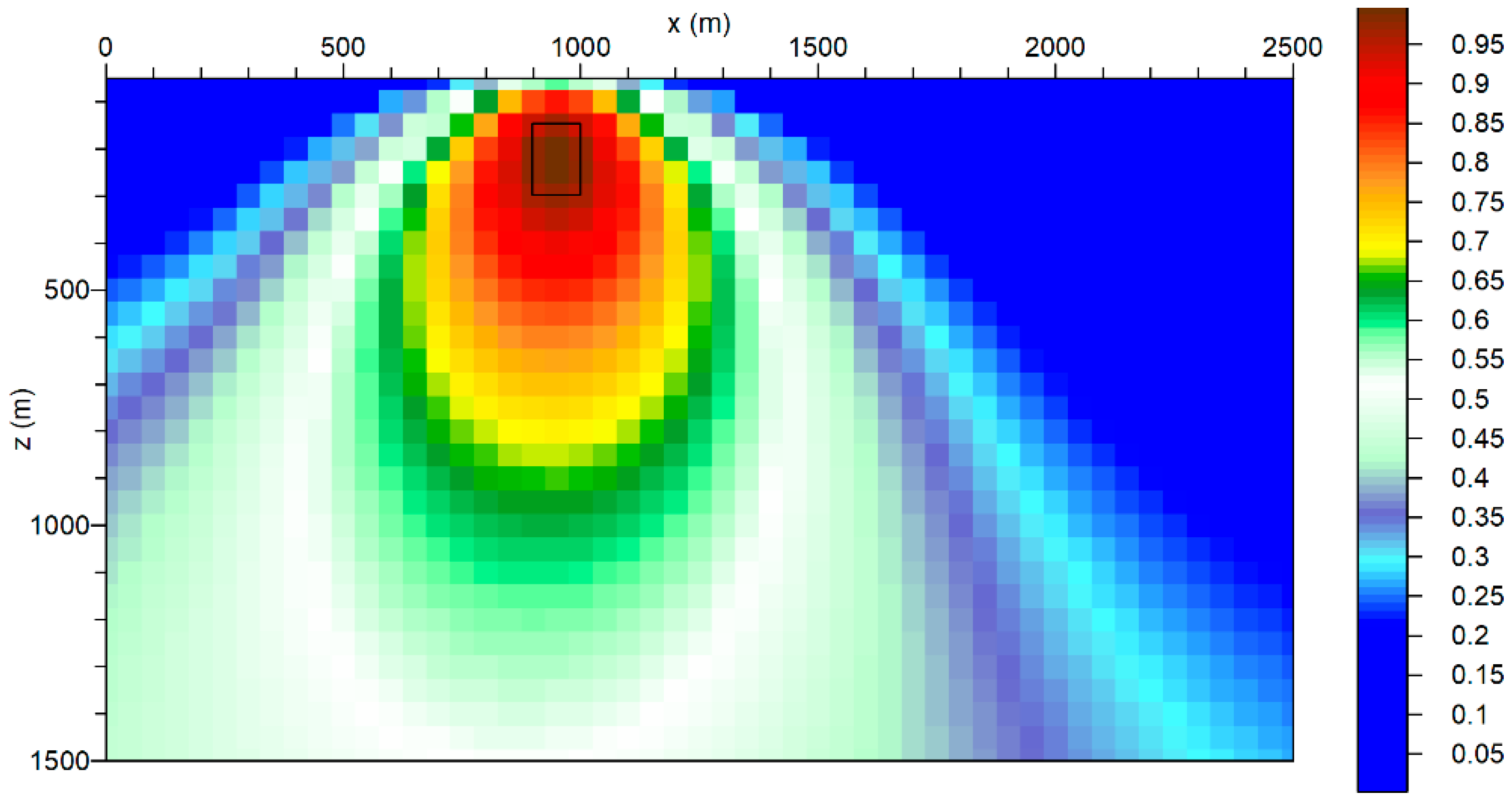
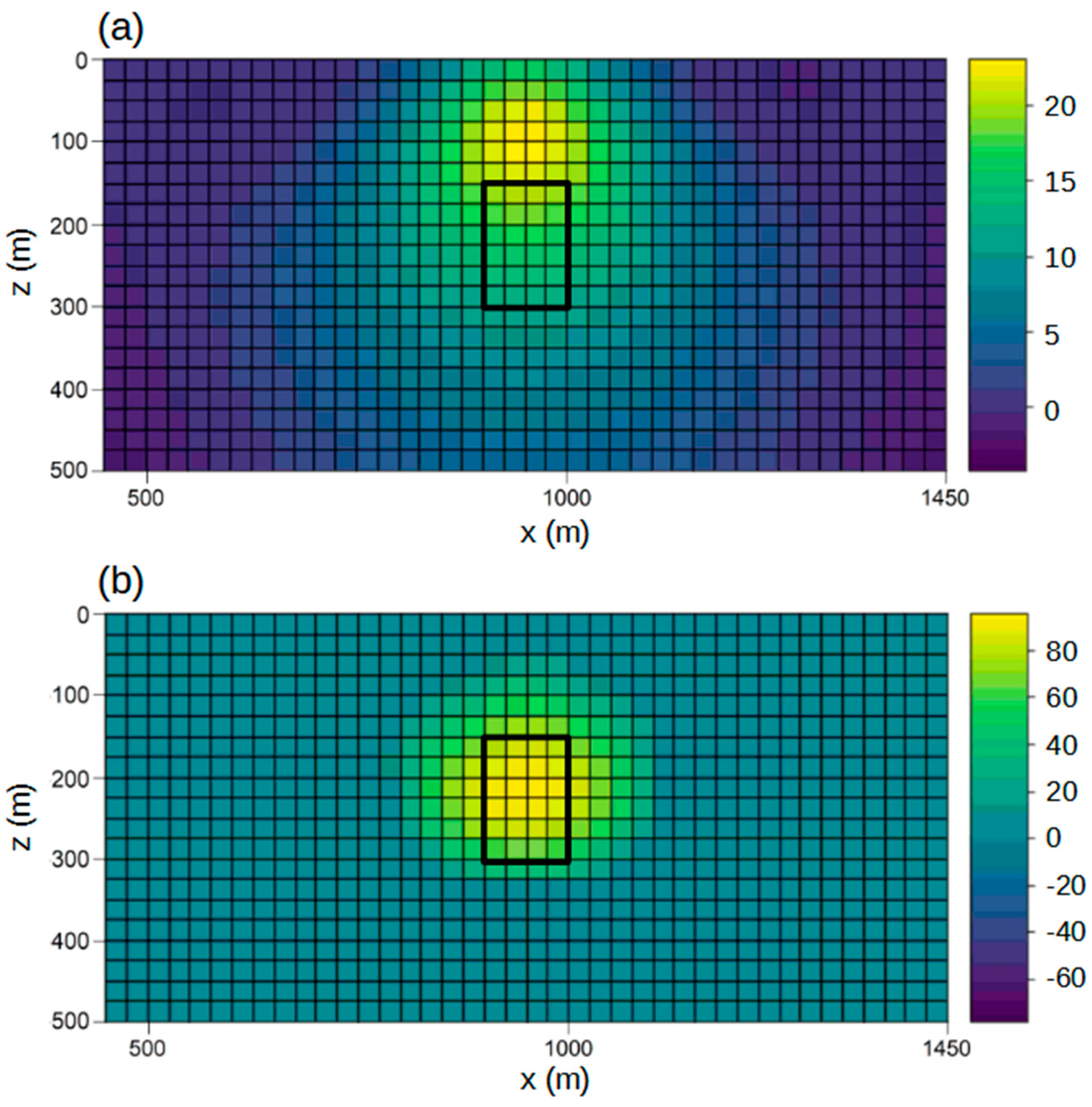
Figure 19a shows the 3D L
2-norm SimPEG inversion, across a line parallel to the
x-axis, through the centre of the anomaly.
Figure 19b shows a different processing with the same software by using a sparse L
2-norm regularization. Both SimPEG results are characterized by a low mismatch between the reconstructed and initial Bouguer anomaly maps. The solution in
Figure 19b appears to be the one that best represents the assigned prismatic body. Comparing this last classical inversion with our best focused PEDTI result in
Figure 3, we see that there is a noticeable difference in the target body density estimate. While the PEDTI density estimate is very close to the real value, the density value estimated by the SimPEG tool is about half an order of magnitude less than the real value. Moreover, we observe that, while PEDTI provides a very sharp shape of the prism, the one provided by SimPEG appears afflicted by a not negligible halo spreading all around the prism, i.e., by a blurred boundary, which can cause a difficulty in subsequent geologic interpretation [
35].
Of course, we do not want to give a universal character to the conclusions reached here with only the simple example dealt with. More complex cases and comparisons with other different deterministic inversion tools would be necessary. They would, however, require a much more articulated treatment, which cannot find space in this paper, essentially dedicated to the exposition of the theoretical principles of the PEDTI method.
6. Summary and Conclusions
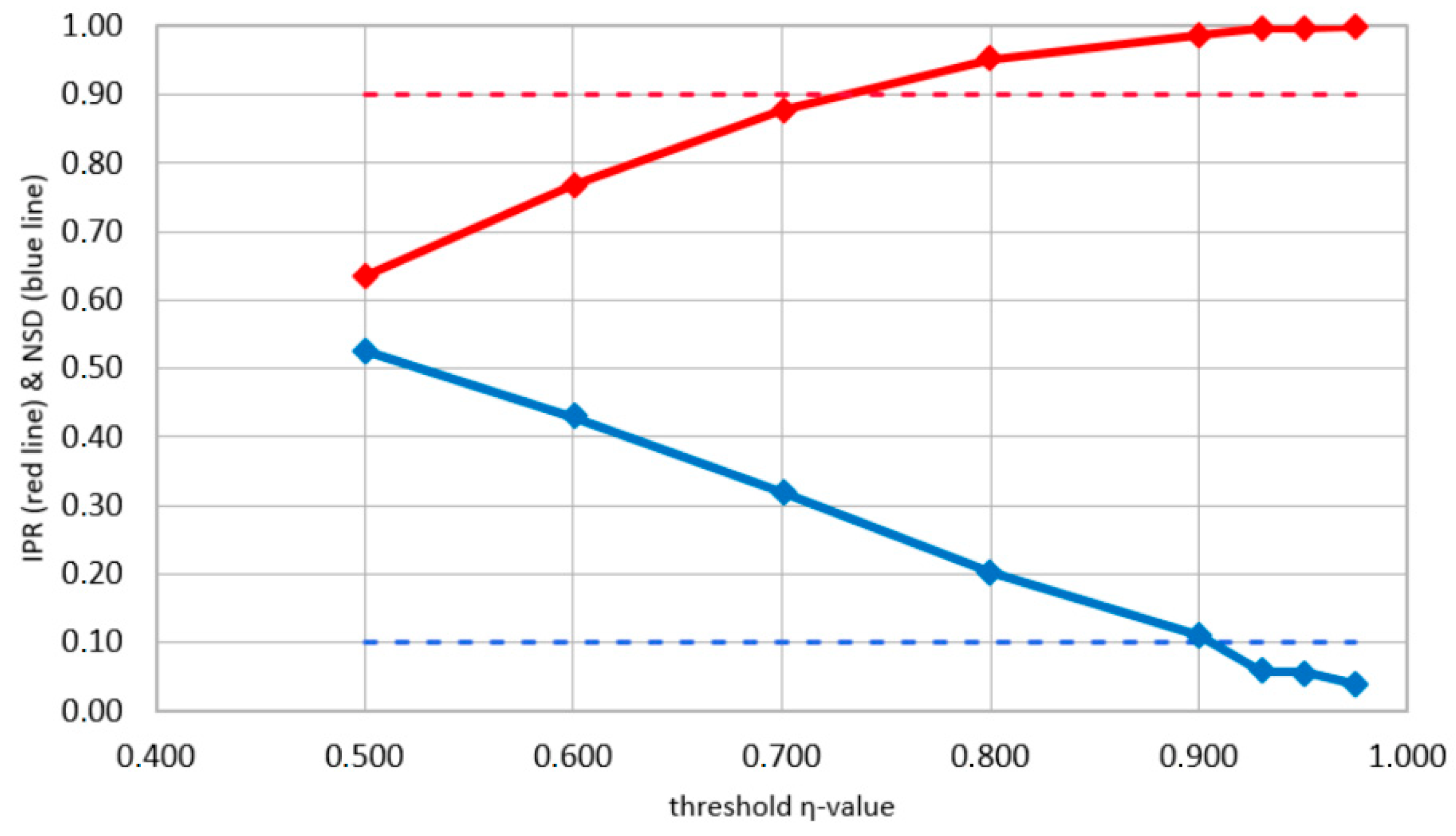
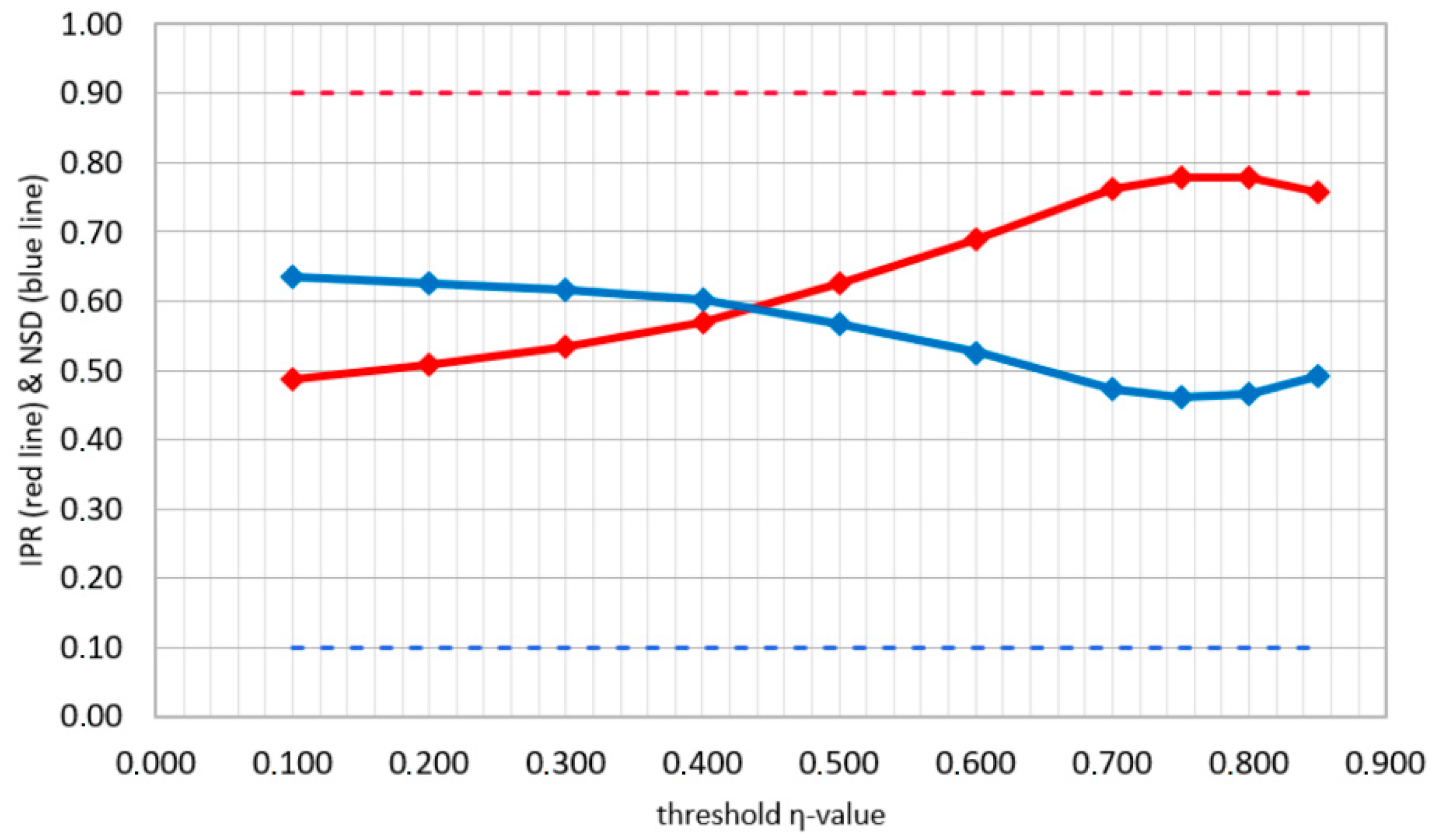
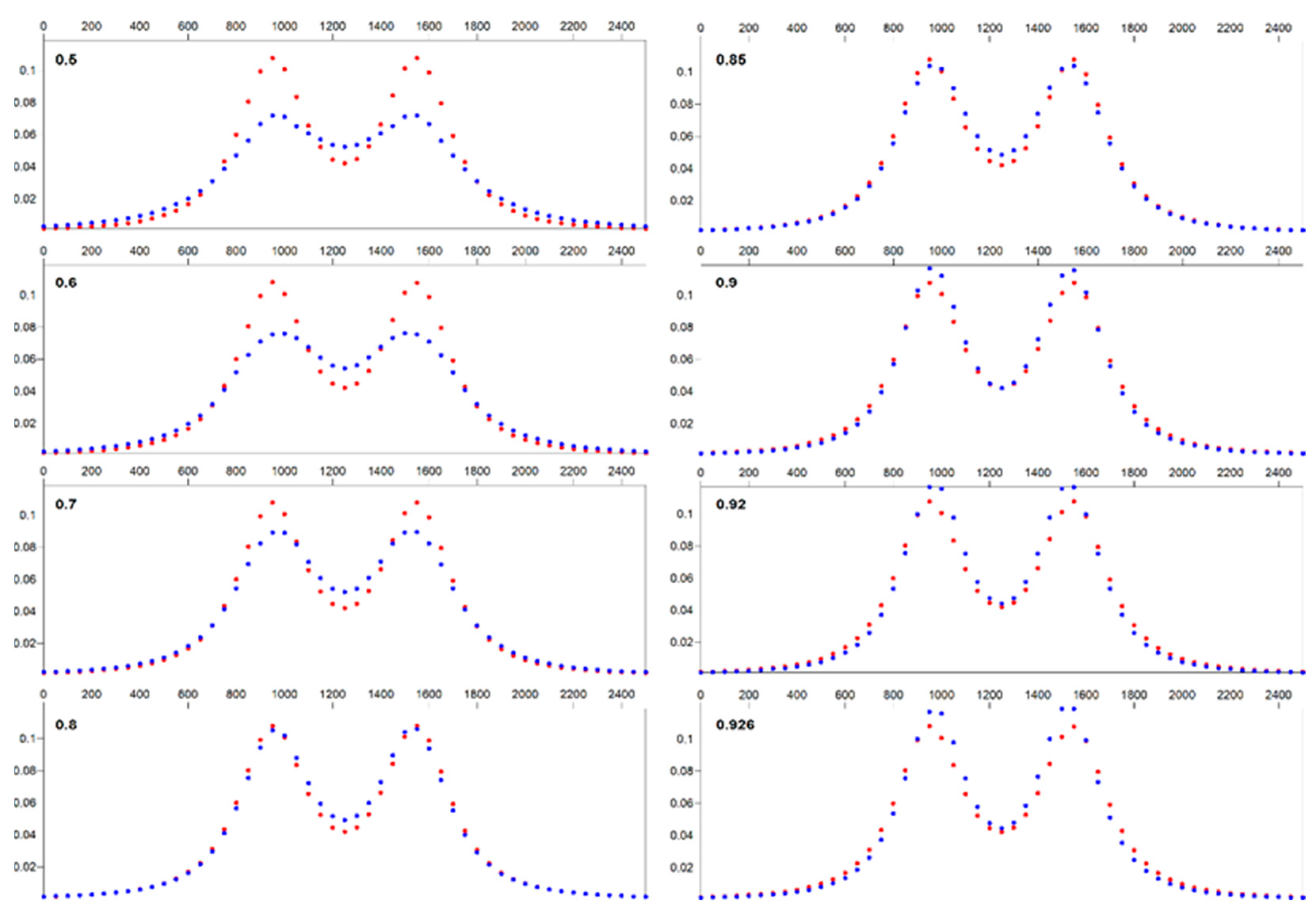
We have proposed an easy and fast 3D gravity inversion algorithm, PEDTI (Probability-based Earth Density Tomographic Inversion), which is a straight derivation from the 3D probability gravity tomography imaging theory. The PEDTI theory has been developed following the rationale previously adopted for the solution of an analogous inversion method applied to geoelectrical datasets. It consists of posing a nullity condition to the occurrence probability function, in order to retrieve the distribution of the density contrast in a 3D grid of cells, filling the investigated subsoil. To make the inversion formula fully data-adaptive, following the principles of the fuzzy logic, the occurrence probability values in the cells have been introduced as weighting factors of a set of kernel functions, which are used to calibrate, in each cell, the contributions coming from all the other cells. Using synthetic models, it has been shown that, by an iterated selection of increasingly narrow ranges of the occurrence probability weighting factors, a wide class of equivalent model solutions can be reconstructed with an increasing focusing capacity. In parallel, the gravity non-uniqueness problem has been investigated by defining two appropriate statistical indices based on the information power of both the input and output gravity datasets. It must be stressed that our PEDTI approach is not finalized to single out the model that matches with the real bodies in the subsoil. It simply aims at retrieving, from a probabilistic point of view, a class of equivalent models, opportunely constrained by the WEL and SEL indices, all compatible with the available dataset.
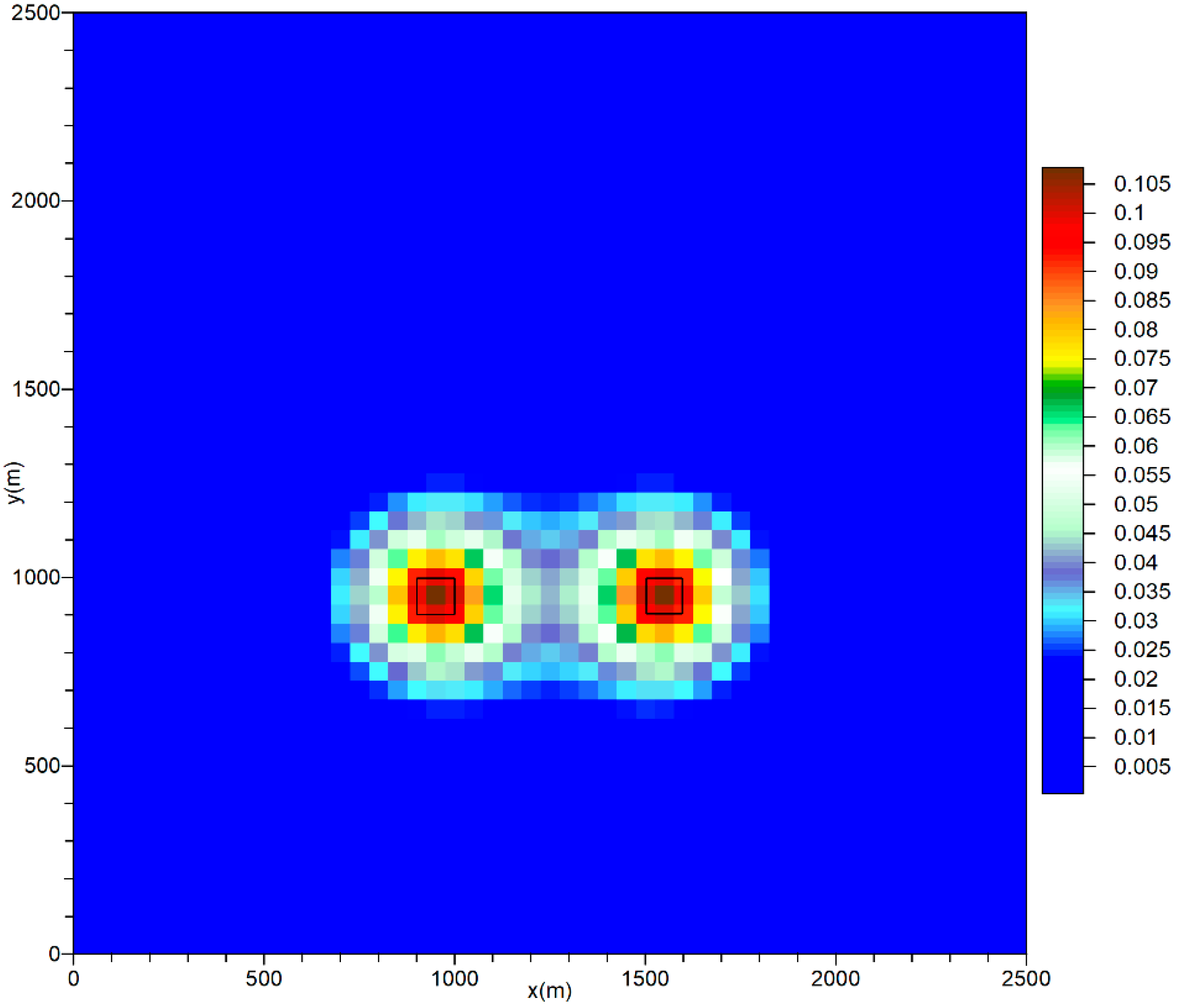
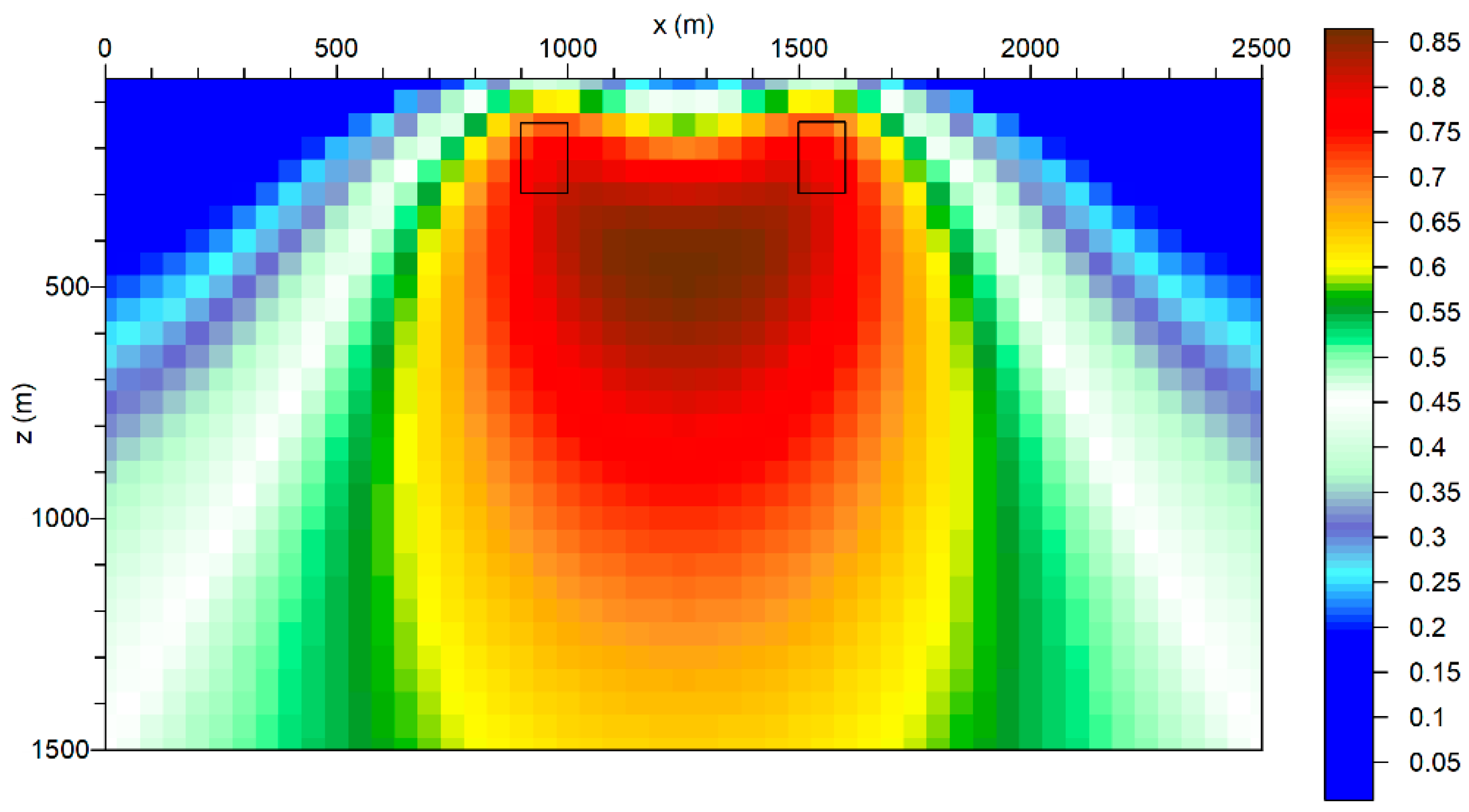
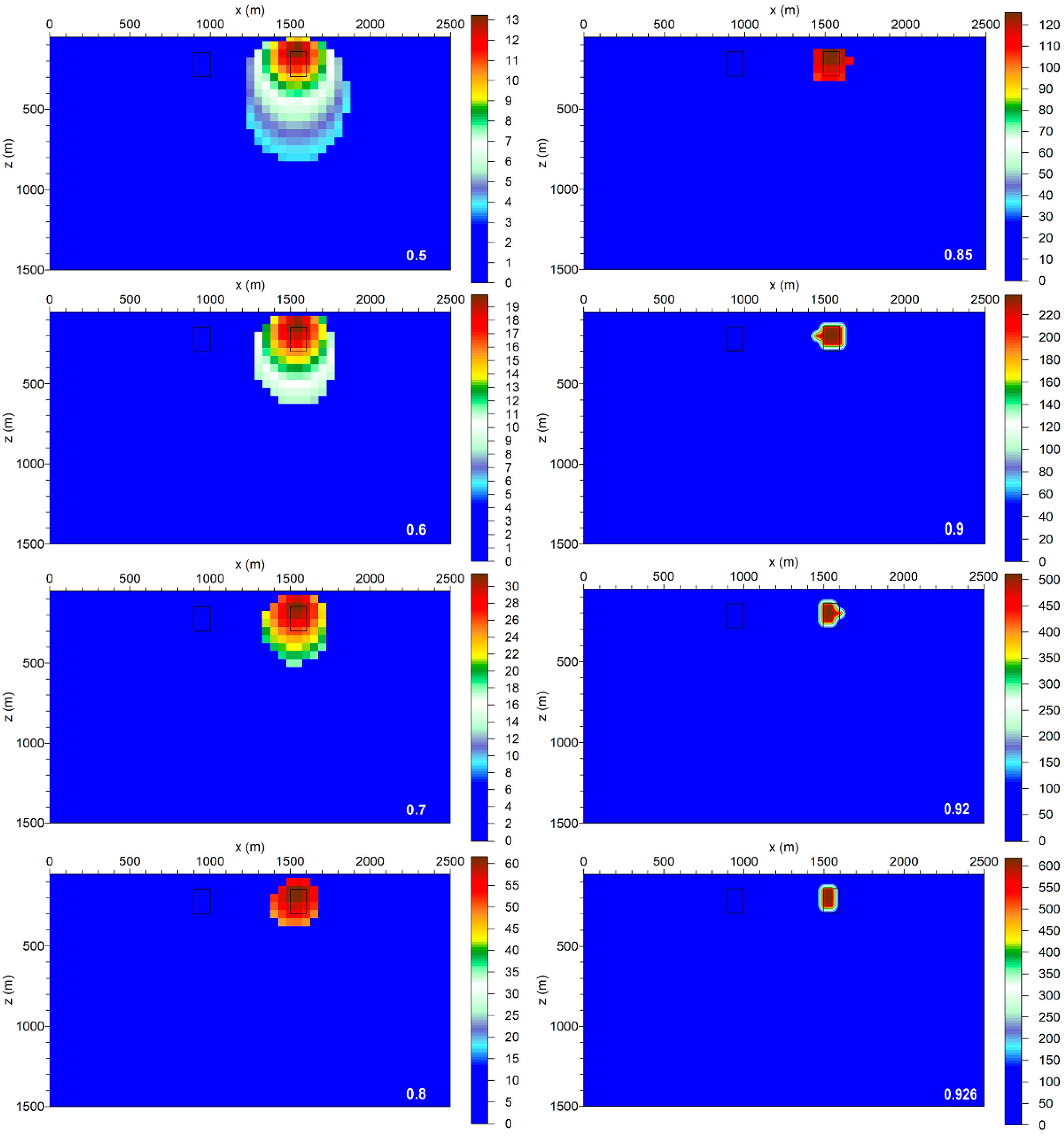
An extension of the PEDTI method, called E-PEDTI, has been introduced with the aim of addressing the problem of mutual contamination deriving from nearby sources of anomalies. Due to the complexity of this problem, we have limited our analysis to a simple symmetrical arrangement of two adjacent identical bodies. An in-depth discussion, also using bodies with different geometry and asymmetric distribution, needs a separate treatment along the lines of what we already did with the E-PERTI method in geoelectrics.
At last, it is worth pointing out that the computation time required by the PEDTI method, including the E-PEDTI extension, is very fast. For the examples we have shown in this paper, we used a laptop with a Processor Intel Core i7-12700K 3.60GHz 25M Alder Lake-S. The net computation time of the entire package, from the GPT analysis to the η-thresholding imaging, for the more complex case of the two-prism model did not exceed 2 min.
To conclude, the main features of the PEDTI method are: (i) a priori information is not a necessity; (ii) full, unconstrained adaptability to any kind of dataset, including the case of non-flat topography; (iii) fast automatic data processing and inversion using standard PCs; (iv) real-time inversion during field work, thus allowing for fast modifications of the survey plan to better focus the expected targets; (v) full independence from data acquisition techniques and spatial regularity.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















