
Beyond Objects in Space-Time: Towards a Movement Analysis Framework with ‘How’ and ‘Why’ Elements


Abstract
:1. Introduction
‘The whole practice and philosophy of geography depends upon the development of a conceptual framework for handling the distribution of objects and events in space.’[1] (p. 191)
1.1. Motivation
1.2. Background
1.3. Objectives
- Conceptual model: Moving beyond the pattern recognition and visualisation projects that currently pervade CMA requires a comprehensive methodology that can accommodate combined ABM, AI, and statistical-based causal analysis techniques (these techniques have been used in isolation up to now). Before any practical implementation attempt, such a general methodology necessitates the development of a well theoretically discussed and conceptually defined framework. A conceptual framework can determine the roadmap for different stages of development, provide the basis for communication, identify potential contributory fields, and the means for evaluation of findings in movement studies.
- Implementation plan: Key contributions from different fields (causal analysis and ABM) will be highlighted to put fundamental concepts together and articulate them into an overriding infrastructure. This conceptual model is intended to be a foundation for future developments of a model-based intelligent agent architecture in movement studies. In the end, a summary of an initial limited implementation of the proposed agent structure is reported here.
2. Literature Review
2.1. Causation and Causal Analysis Methods
2.2. Graphical Causal Models
2.3. Agent-Based Models (ABM)
2.4. The Case for Integrating GCM and ABM
2.5. Movement Representation: An Agent-Based Perspective
3. Conceptualising the Causal Analysis Framework
Movement Inquiries: A Causal-Based Perspective
4. A Call for Adopting Causal Concepts in Movement Analysis
5. An Initial Implementation of the Framework: Grounding the Proposed Agent-Structure
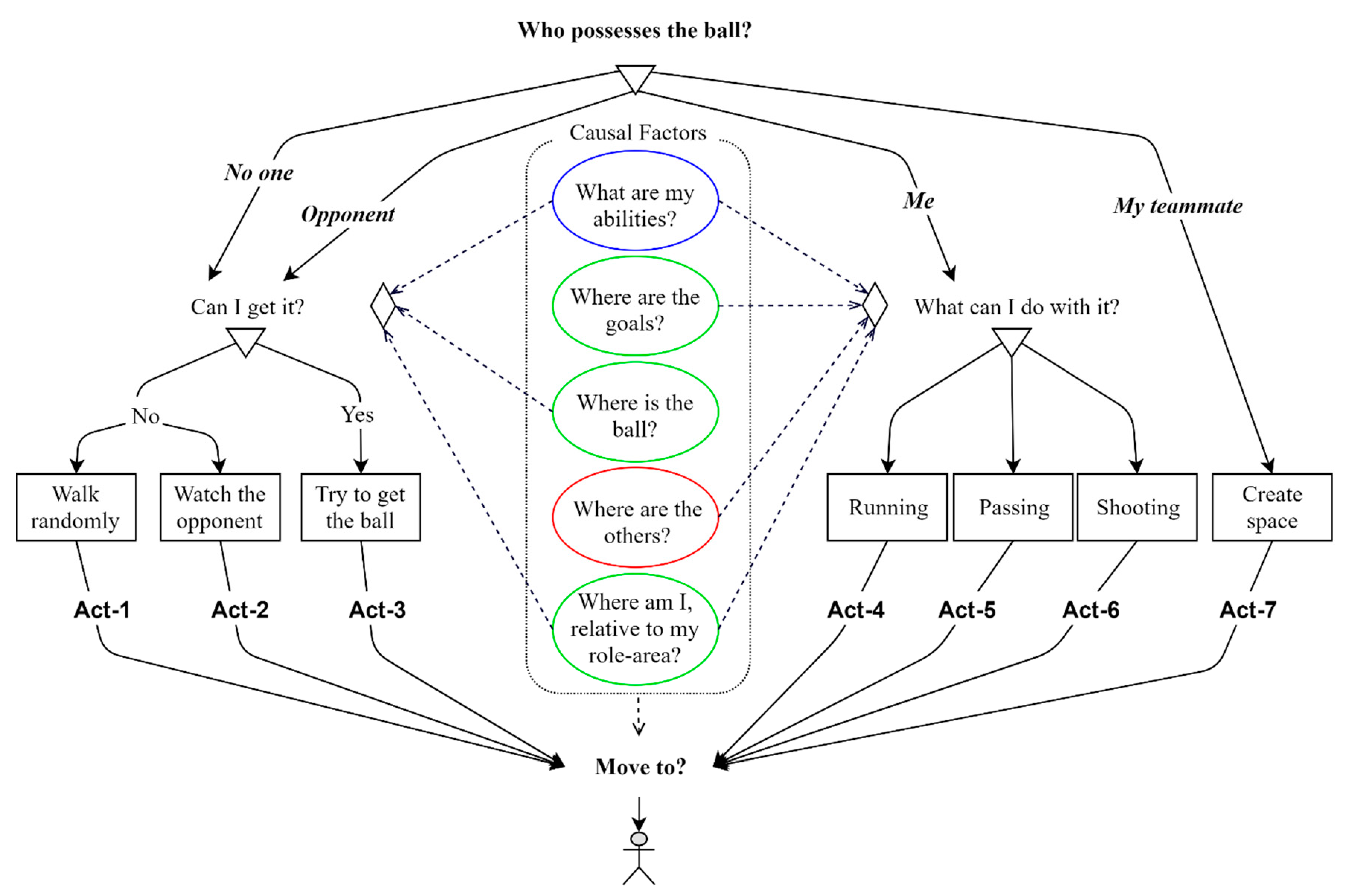
- The zero-order factors characterise the players’ inherent capabilities. These are ‘Stamina’, ‘Energy’, ‘Pace’, ‘Agility’, and ‘Shooting’ abilities (or attributes).
- The first-order causes represent the environmental actors. These actors include an imagined hard-bounded-box around each player’s role-area (an area that players mostly tend to move within), the elements that shape the football pitch (i.e., boundaries), and the Goals. The ball is also considered as an environmental actor, as it does not move due to an autonomously-made decision.
- The second-order causal factors indicate the interactions between this auto-agent and other auto-agents (players).

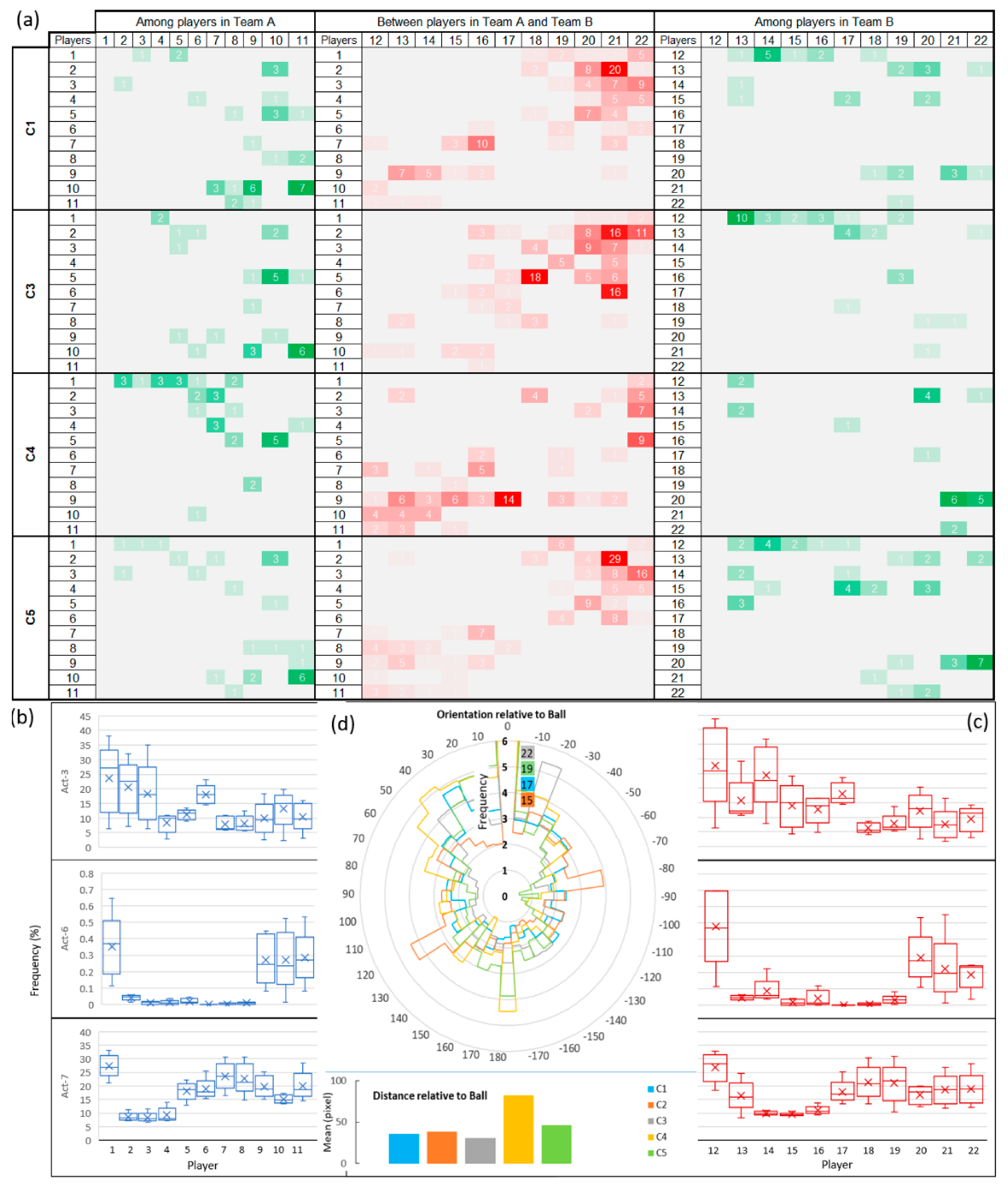
- E—consumed, F—3-5-2, M—man-to-man (C1);
- E—not consumed, F—3-5-2, M—man-to-man (C2);
- E—consumed, F—3-5-2 (Team A) 4-4-3 (Team B), M—man-to-man (C3);
- E—consumed, F—4-4-3 (Team A) 3-5-2 (Team B), M—man-to-man (C4);
- E—consumed, F—3-5-2, M—zonal marking plan (C5).

6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Harvey, D. Explanation in Geography; Edward Arnold: London, UK, 1969. [Google Scholar]
- Gudmundsson, J.; Laube, P.; Wolle, T. Computational Movement Analysis. In Springer Handbook of Geographic Information; Springer: Berlin/Heidelberg, Germany, 2011; pp. 423–438. [Google Scholar] [CrossRef]
- Long, J.A.; Nelson, T.A. A Review of Quantitative Methods for Movement Data. Int. J. Geogr. Inf. Sci. 2013, 27, 292–318. [Google Scholar] [CrossRef] [Green Version]
- Demšar, U.; Buchin, K.; Cagnacci, F.; Safi, K.; Speckmann, B.; Van de Weghe, N.; Weiskopf, D.; Weibel, R. Analysis and Visualisation of Movement: An Interdisciplinary Review. Mov. Ecol. 2015, 3, 5. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, M. Human Dynamics in Space and Time: A Brief History and a View Forward. Trans. GIS 2018, 22, 900–912. [Google Scholar] [CrossRef]
- Andrienko, G.; Andrienko, N.; Budziak, G.; Dykes, J.; Fuchs, G.; von Landesberger, T.; Weber, H. Visual Analysis of Pressure in Football. Data Min. Knowl. Discov. 2017, 31, 1793–1839. [Google Scholar] [CrossRef]
- Andrienko, G.; Andrienko, N.; Anzer, G.; Bauer, P.; Budziak, G.; Fuchs, G.; Hecker, D.; Weber, H.; Wrobel, S. Constructing Spaces and Times for Tactical Analysis in Football. IEEE Trans. Vis. Comput. Graph. 2019. [Google Scholar] [CrossRef] [Green Version]
- Miller, H.J.; Goodchild, M.F. Data-Driven Geography. Geo. J. 2015, 80, 449–461. [Google Scholar] [CrossRef]
- Graser, A.; Widhalm, P.; Dragaschnig, M. The M3 Massive Movement Model: A Distributed Incrementally Updatable Solution for Big Movement Data Exploration. Int. J. Geogr. Inf. Sci. 2020, 34, 2517–2540. [Google Scholar] [CrossRef]
- Bleisch, S.; Duckham, M.; Galton, A.; Laube, P.; Lyon, J. Mining Candidate Causal Relationships in Movement Patterns. Int. J. Geogr. Inf. Sci. 2014, 28, 363–382. [Google Scholar] [CrossRef] [Green Version]
- Dodge, S.; Gao, S.; Tomko, M.; Weibel, R. Progress in Computational Movement Analysis—Towards Movement Data Science. Int. J. Geogr. Inf. Sci. 2020, 34, 2395–2400. [Google Scholar] [CrossRef]
- Laube, P. Computational Movement Analysis; Springer: Berlin, Germany, 2014. [Google Scholar]
- Lucey, P.; Bialkowski, A.; Carr, P.; Foote, E.; Matthews, I. Characterizing Multi-Agent Team Behavior from Partial Team Tracings: Evidence from the English Premier League. In 26th AAAI Conference on Artificial Intelligence; Association for the Advancement of Artificial Intelligence: Toronto, ON, Canada, 2012; pp. 1387–1393. [Google Scholar]
- Yue, Y.; Lucey, P.; Carr, P.; Bialkowski, A.; Matthews, I. Learning Fine-Grained Spatial Models for Dynamic Sports Play Prediction. In IEEE International Conference on Data Mining; IEEE: Shenzhen, China, 2014; pp. 670–679. [Google Scholar] [CrossRef] [Green Version]
- Le, H.M.; Yue, Y.; Carr, P.; Lucey, P. Coordinated Multi-Agent Imitation Learning. In ICML 2017: 34th International Conference on Machine Learning; Journal of Machine Learning Research: Sydney, NSW, Australia, 2017; pp. 1995–2003. [Google Scholar]
- Le, H.M.; Carr, P.; Yue, Y.; Lucey, P. Data-Driven Ghosting Using Deep Imitation Learning. In Proceedings of the MIT Sloan Sports Analytics Conference, Boston, MA, USA, 3–4 March 2017; p. 15. [Google Scholar]
- Zheng, S.; Yue, Y.; Hobbs, J. Generating Long-Term Trajectories Using Deep Hierarchical Networks. In Advances in Neural Information Processing Systems; Lee, D.D., Sugiyama, M., Luxburg, U.V., Guyon, I., Garnett, R., Eds.; Curran Associates: New York, NY, USA, 2016; pp. 1543–1551. [Google Scholar]
- Pearl, J.; Mackenzie, D. The Book of Why: The New Science of Cause and Effect, 1st ed.; Basic Books: New York, NY, USA, 2018. [Google Scholar]
- Darwiche, A. Human-Level Intelligence or Animal-like Abilities? Commun. ACM 2018, 61, 56–67. [Google Scholar] [CrossRef] [Green Version]
- Harland, K.; Crooks, A.T.; See, L.; Batty, M. Agent-Based Models of Geographical Systems; Springer Science & Business Media: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Heppenstall, A.; Crooks, A. Guest Editorial for Spatial Agent-Based Models: Current Practices and Future Trends. Geoinformatica 2019, 23, 163–167. [Google Scholar] [CrossRef] [Green Version]
- O’Sullivan, D.; Millington, J.; Perry, G.; Wainwright, J. Agent-Based Models—Because They’re Worth It? In Agent-Based Models of Geographical Systems; Springer Netherlands: Dordrecht, The Netherlands, 2012; pp. 109–123. [Google Scholar] [CrossRef]
- Bonabeau, E. Agent-Based Modeling: Methods and Techniques for Simulating Human Systems. Proc. Natl. Acad. Sci. USA 2002, 99 (Suppl. 3), 7280–7287. [Google Scholar] [CrossRef] [Green Version]
- Casini, L.; Manzo, G. Agent-Based Models and Causality: A Methodological Appraisal; The IAS Working Paper Series; Linköping University Electronic Press: Linköping, Sweden, 2016; Volume 7. [Google Scholar]
- Manson, S.; An, L.; Clarke, K.C.; Heppenstall, A.; Koch, J.; Krzyzanowski, B.; Morgan, F.; O’sullivan, D.; Runck, B.C.; Shook, E.; et al. Methodological Issues of Spatial Agent-Based Models. J. Artif. Soc. Soc. Simul. 2020, 23. [Google Scholar] [CrossRef]
- Lozano, A.C.; Li, H.; Niculescu-Mizil, A.; Liu, Y.; Perlich, C.; Hosking, J.R.M.; Abe, N. Spatial-Temporal Causal Modeling for Climate Change Attribution. In Proceedings of the 15th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Paris, France, 28 June–1 July 2009; pp. 587–595. [Google Scholar] [CrossRef] [Green Version]
- Luo, Q.; Lu, W.; Cheng, W.; Valdes-Sosa, P.A.; Wen, X.; Ding, M.; Feng, J. Spatio-Temporal Granger Causality: A New Framework. Neuroimage 2013, 79, 241–263. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, J.Y.; Sun, C.; Li, V.O.K. An Extended Spatio-Temporal Granger Causality Model for Air Quality Estimation with Heterogeneous Urban Big Data. IEEE Trans. Big Data 2017, 3, 307–319. [Google Scholar] [CrossRef]
- Christiansen, R.; Baumann, M.; Kuemmerle, T.; Mahecha, M.D.; Peters, J. Towards Causal Inference for Spatio-Temporal Data: Conflict and Forest Loss in Colombia. arXiv 2020, arXiv:2005.08639. [Google Scholar]
- Hume, D. An Enquiry Concerning Human Understanding. In Essays and Treatises on Several Subjects; Printed for Andrew Millar: London, UK, 1758; Volume 2, pp. 215–396. [Google Scholar] [CrossRef] [Green Version]
- Hitchcock, C. Probabilistic Causation. Stanford Encyclopedia of Philosophy; Zalta, E.N., Ed.; Stanford University: Stanford, CA, USA, 2018. [Google Scholar]
- Kleinberg, S.; Mishra, B. The Temporal Logic of Causal Structures. In Twenty-Fifth Conference on Uncertainty in Artificial Intelligence (UAI2009); AUAI Press: Montreal, QC, Canada, 2009; pp. 303–312. [Google Scholar]
- Lewis, D. On the Plurality of Worlds; Blackwell: Oxford, UK, 1986. [Google Scholar] [CrossRef]
- Lewis, D.K. Counterfactuals; Cambridge University Press (CUP): Cambridge, MA, USA, 1973. [Google Scholar]
- Hall, N. Two Concepts of Causation. In Causation and Counterfactuals; Collins, J., Hall, N., Paul, L.A., Eds.; MIT Press: Cambridge, MA, USA, 2004; pp. 225–276. [Google Scholar]
- Hall, N. Structural Equations and Causation. Philos. Stud. 2007, 132, 109–136. [Google Scholar] [CrossRef] [Green Version]
- Heckman, J.J. The Scientific Model of Causality. Sociol. Methodol. 2005, 35, 1–97. [Google Scholar] [CrossRef]
- Rubin, D.B. Estimating Causal Effects of Treatments in Randomized and Nonrandomized Studies. J. Educ. Psychol. 1974, 66, 688–701. [Google Scholar] [CrossRef] [Green Version]
- Pearl, J. Causal Diagrams for Empirical Research. Biometrika 1995, 82, 669–688. [Google Scholar] [CrossRef]
- Pearl, J. Bayesian Netwcrks: A Model Cf Self-Activated Memory for Evidential Reasoning. In Proceedings of the 7th Annual Conference of the Cognitive Science Society, Irvine, CA, USA, 15–17 August 1985; pp. 329–334. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann Publishers INC: San Francisco, CA, USA, 1988. [Google Scholar]
- Pearl, J. Causality, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar] [CrossRef]
- Pearl, J. Causality: Models, Reasoning, and Inference; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Imbens, G.W. Potential Outcome and Directed Acyclic Graph Approaches to Causality: Relevance for Empirical Practice in Economics. J. Econ. Lit. 2020, 58, 1129–1179. [Google Scholar] [CrossRef]
- Greenland, S.; Pearl, J.; Robins, J.M. Causal Diagrams for Epidemiologic Research. Epidemiology 1999, 10, 37–48. [Google Scholar] [CrossRef]
- Robins, J.M. Data, Design, and Background Knowledge in Etiologic Inference. Epidemiology 2011, 23, 313–320. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Glymour, M.M.; Greenland, S. Causal Diagrams. In Modern Epidemiology; Rothman, K., Greenland, S., Eds.; Lippincott Williams & Wilkins Company: Philadelphia, PA, USA, 2008; pp. 183–209. [Google Scholar]
- Glymour, C.; Zhang, K.; Spirtes, P. Review of Causal Discovery Methods Based on Graphical Models. Front. Genet. 2019, 10. [Google Scholar] [CrossRef] [Green Version]
- Morgan, S.L.; Winship, C. Counterfactuals and Causal Inference: Methods and Principles for Social Research, 2nd ed.; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Hitchcock, C. Causal Models. In Stanford Encyclopedia of Philosophy; Stanford University: Stanford, CA, USA, 2018; p. 79. [Google Scholar]
- Elwert, F. Graphical Causal Models. In Handbooks of Sociology and Social Research; Morgan, S.L., Ed.; Springer: Dordrecht, The Netherlands, 2013; pp. 245–273. [Google Scholar] [CrossRef]
- Shpitser, I.; Pearl, J. Complete Identification Methods for the Causal Hierarchy. J. Mach. Learn. Res. 2008, 9, 1941–1979. [Google Scholar] [CrossRef]
- Pearl, J. The Causal Foundations of Structural Equation Modeling. In Handbook of Structural Equation Modeling; Hoyle, R.H., Ed.; Guilford Press: New York, NY, USA, 2012. [Google Scholar]
- Abdulkareem, S.A.; Mustafa, Y.T.; Augustijn, E.W.; Filatova, T. Bayesian Networks for Spatial Learning: A Workflow on Using Limited Survey Data for Intelligent Learning in Spatial Agent-Based Models. Geoinformatica 2019, 23, 243–268. [Google Scholar] [CrossRef] [Green Version]
- Herd, B.C.; Miles, S. Detecting Causal Relationships in Simulation Models Using Intervention-Based Counterfactual Analysis. ACM Trans. Intell. Syst. Technol. 2019, 10. [Google Scholar] [CrossRef] [Green Version]
- Gilbert, N. Models, Processes and Algorithms: Towards a Simulation Toolkit. In Tools and Techniques for Social Science Simulation; Suleiman, R., Troitzsch, K.G., Gilbert, N., Eds.; Physica-Verl: Heidelberg, Germany, 2000. [Google Scholar]
- Arnold, K.F. Statistical and Simulation-Based Modelling Approaches for Causal Inference in Longitudinal Data: Integrating Counterfactual Thinking into Established Methods for Longitudinal Data Analysis; University of Leeds: Leeds, UK, 2020. [Google Scholar]
- Lovelace, R.; Dumont, M. Spatial Microsimulation with R.; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- O’Sullivan, D.; Haklay, M. Agent-Based Models and Individualism: Is the World Agent-Based? Environ. Plan. A Econ. Sp. 2000, 32, 1409–1425. [Google Scholar] [CrossRef] [Green Version]
- Macy, M.W.; Willer, R. From Factors to Actors: Computational Sociology and Agent-Based Modeling. Annu. Rev. Sociol. 2002, 28, 143–166. [Google Scholar] [CrossRef]
- Schelling, T.C. Micromotives and Macrobehavior; W. W. Norton & Company: New York, NY, USA, 2006. [Google Scholar]
- Humphreys, P. The Chances of Explanation: Causal Explanation in the Social, Medical, and Physical Sciences; Princeton University Press: Princeton, NJ, USA, 2014. [Google Scholar]
- Diez Roux, A.V. Invited Commentary: The Virtual Epidemiologist—Promise and Peril. Am. J. Epidemiol. 2015, 181, 100–102. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, C.W. Flocks, Herds, and Schools: A Distributed Behavioral Model. Comput. Graph. (ACM) 1987, 21, 9–34. [Google Scholar] [CrossRef] [Green Version]
- Tang, W.; Bennett, D.A. Agent-Based Modeling of Animal Movement: A Review. Geogr. Compass 2010, 4, 682–700. [Google Scholar] [CrossRef]
- McLane, A.J.; Semeniuk, C.; McDermid, G.J.; Marceau, D.J. The Role of Agent-Based Models in Wildlife Ecology and Management. Ecol. Modell. 2011, 222, 1544–1556. [Google Scholar] [CrossRef]
- Wallentin, G. Spatial Simulation: A Spatial Perspective on Individual-Based Ecology—A Review. Ecol. Modell. 2017, 350, 30–41. [Google Scholar] [CrossRef]
- Grimm, V.; Railsback, S.F. Individual-Based Modeling and Ecology; Princeton University Press: Princeton, NJ, USA, 2005. [Google Scholar]
- Parrott, L.; Kok, R. A Generic, Individual-Based Approach to Modelling Higher Trophic Levels in Simulation of Terrestrial Ecosystems. Ecol. Modell. 2002, 154, 151–178. [Google Scholar] [CrossRef]
- Ahearn, S.C.; Smith, J.L.D.; Joshi, A.R.; Ding, J. TIGMOD: An Individual-Based Spatially Explicit Model for Simulating Tiger/Human Interaction in Multiple Use Forests. Ecol. Modell. 2001, 140, 81–97. [Google Scholar] [CrossRef]
- Batty, M. Agent-Based Pedestrian Modeling. Environ. Plan. B Plan. Des. 2001, 28, 321–326. [Google Scholar] [CrossRef] [Green Version]
- Klügl, F.; Rindsfüser, G. Large-Scale Agent-Based Pedestrian Simulation. In Multiagent System Technologies; Petta, P., Müller, J.P., Klusch, M., Georgeff, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 145–156. [Google Scholar] [CrossRef]
- Bazzani, A.; Capriotti, M.; Giorgini, B.; Melchiorre, G.; Rambaldi, S.; Servizi, G.; Turchetti, G. A Model for Asystematic Mobility in Urban Space. In The Dynamics of Complex Urban Systems; Albeverio, S., Andrey, D., Giordano, P., Vancheri, A., Eds.; Physica-Verlag HD: Heidelberg, Germany, 2008; pp. 59–73. [Google Scholar] [CrossRef]
- Pluchino, A.; Garofalo, C.; Inturri, G.; Rapisarda, A.; Ignaccolo, M. Agent-Based Simulation of Pedestrian Behaviour in Closed Spaces: A Museum Case Study. J. Artif. Soc. Soc. Simul. 2013, 17, 14. [Google Scholar] [CrossRef] [Green Version]
- Crooks, A.; Croitoru, A.; Lu, X.; Wise, S.; Irvine, J.; Stefanidis, A. Walk This Way: Improving Pedestrian Agent-Based Models through Scene Activity Analysis. ISPRS Int. J. Geo-Inf. 2015, 4, 1627–1656. [Google Scholar] [CrossRef] [Green Version]
- Torrens, P.M. Moving Agent Pedestrians through Space and Time. Ann. Assoc. Am. Geogr. 2012, 102, 35–66. [Google Scholar] [CrossRef]
- Haklay, M.; O’Sullivan, D.; Thurstain-Goodwin, M.; Schelhorn, T. “So Go Downtown”: Simulating Pedestrian Movement in Town Centres. Environ. Plan. B Plan. Des. 2001, 28, 343–359. [Google Scholar] [CrossRef] [Green Version]
- Schelhorn, T.; O’Sullivan, D.; Haklay, M.; Thurstain-Goodwin, M. STREETS: An Agent-Based Pedestrian Model; Centre for Advanced Spatial Analysis UCL: London, UK, 2005. [Google Scholar]
- Pizzitutti, F.; Pan, W.; Feingold, B.; Zaitchik, B.; Álvarez, C.A.; Mena, C.F. Out of the Net: An Agent-Based Model to Study Human Movements Influence on Local-Scale Malaria Transmission. PLoS ONE 2018, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- O’Sullivan, D.; Gahegan, M.; Exeter, D.J.; Adams, B. Spatially Explicit Models for Exploring COVID-19 Lockdown Strategies. Trans. GIS 2020, 24, 967–1000. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, B.; Abukmail, A.; Kraemer, L. Advancing the Layered Approach to Agent-Based Crowd Simulation. In Proceedings of the 22nd Workshop on Principles of Advanced and Distributed Simulation, Roma, Italy, 3–6 June 2008; IEEE Computer Society: Washington, DC, USA, 2008; pp. 185–192. [Google Scholar] [CrossRef]
- Szymanezyk, O.; Dickinson, P.; Duckett, T. Towards Agent-Based Crowd Simulation in Airports Using Games Technology. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2011; Volume 6682 LNAI, pp. 524–533. [Google Scholar] [CrossRef] [Green Version]
- Pelekis, N.; Theodoulidis, B.; Kopanakis, I.; Theodoridis, Y. Literature Review of Spatio-Temporal Database Models. Knowl. Eng. Rev. 2004, 19, 235–274. [Google Scholar] [CrossRef]
- Epstein, J.M.; Axtell, R. Growing Artificial Societies: Social Science from the Bottom Up; Brookings Institution Press: Washington, DC, USA, 1996. [Google Scholar]
- Wooldridge, M. Intelligent Agents. In Multiagent Systems; Gerhard Weiss, Ed.; MIT Press: Cambridge, MA, USA, 1999; pp. 3–40. [Google Scholar] [CrossRef]
- Macal, C.M.; North, M.J. Tutorial on Agent-Based Modeling and Simulation. In Winter Simulation Conference; Kuhl, M.E., Steiger, N.M., Armstrong, B.F., Joines, J.A., Eds.; IEEE: Orlando, FL, USA, 2005; pp. 2–15. [Google Scholar] [CrossRef]
- Torrens, P.M.; Benenson, I. Geographic Automata Systems. Int. J. Geogr. Inf. Sci. 2005, 19, 385–412. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Peuquet, D.J. A GeoAgent-based Framework for Knowledge-oriented Representation: Embracing Social Rules in GIS. Int. J. Geogr. Inf. Sci. 2009, 23, 923–960. [Google Scholar] [CrossRef]
- Moore, A. Geographical Vector Agent-Based Simulation for Agricultural Land-Use Modelling. In Advanced Geosimulation Models; Marceau, D.J., Benenson, I., Eds.; Bentham Science Publisher: Sharjah, United Arab Emirates, 2011; pp. 30–48. [Google Scholar]
- Luck, M.; d’Inverno, M. A Conceptual Framework for Agent Definition and Development. Comput. J. 2001, 44, 1–20. [Google Scholar] [CrossRef]
- Erwig, M.; Güting, R.H.; Schneider, M.; Vazirgiannis, M. Spatio-Temporal Data Types: An Approach to Modeling and Querying Moving Objects in Databases. Geoinformatica 1999, 3, 269–296. [Google Scholar] [CrossRef]
- Nathan, R.; Getz, W.M.; Revilla, E.; Holyoak, M.; Kadmon, R.; Saltz, D.; Smouse, P.E. A Movement Ecology Paradigm for Unifying Organismal Movement Research. Proc. Natl. Acad. Sci. USA 2008, 105, 19052–19059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blachowicz, J. How Science Textbooks Treat Scientific Method: A Philosopher’s Perspective. Br. J. Philos. Sci. 2009, 60, 303–344. [Google Scholar] [CrossRef] [Green Version]
- Blaikie, N.W.H. Analyzing Quantitative Data: From Description to Explanation; Sage Publications: Thousand Oaks, CA, USA, 2003. [Google Scholar]
- Hernán, M.A.; Hsu, J.; Healy, B. A Second Chance to Get Causal Inference Right: A Classification of Data Science Tasks. Chance 2019, 32, 42–49. [Google Scholar] [CrossRef] [Green Version]
- Turchin, P. Quantitative Analysis of Movement: Measuring and Modeling Population Redistribution in Animals and Plants; Sinauer Associates: Sunderland, MA, USA, 1998. [Google Scholar]
- Sharif, M.; Alesheikh, A.A. Context-Aware Movement Analytics: Implications, Taxonomy, and Design Framework. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1233. [Google Scholar] [CrossRef]
- Buchin, M.; Dodge, S.; Speckmann, B. Similarity of Trajectories Taking into Account Geographic Context. J. Spat. Inf. Sci. Number 2014, 9, 101–124. [Google Scholar] [CrossRef]
- Edelhoff, H.; Signer, J.; Balkenhol, N. Path Segmentation for Beginners: An Overview of Current Methods for Detecting Changes in Animal Movement Patterns. Mov. Ecol. 2016, 4, 21. [Google Scholar] [CrossRef] [Green Version]
- Laube, P. Progress in Movement Pattern Analysis. In Behaviour Monitoring and Interpretation—BMI: Smart Environments; Gottfried, B., Aghajan, H., Eds.; IOS Press: Amsterdam, The Netherlands, 2009; pp. 43–71. [Google Scholar] [CrossRef]
- Dodge, S.; Weibel, R.; Lautenschütz, A.-K. Towards a Taxonomy of Movement Patterns. Inf. Vis. 2008, 7, 240–252. [Google Scholar] [CrossRef] [Green Version]
- Toohey, K.; Duckham, M. Trajectory Similarity Measures. SIGSPATIAL Spec. 2015, 7, 43–50. [Google Scholar] [CrossRef]
- Su, H.; Liu, S.; Zheng, B.; Zhou, X.; Zheng, K. A Survey of Trajectory Distance Measures and Performance Evaluation. VLDB J. 2020, 29, 3–32. [Google Scholar] [CrossRef]
- Andrienko, N.; Andrienko, G.; Pelekis, N.; Spaccapietra, S. Basic Concepts of Movement Data. In Mobility, Data Mining and Privacy; Springer: Berlin/Heidelberg, Germany, 2008; pp. 15–38. [Google Scholar] [CrossRef]
- Spaccapietra, S.; Parent, C.; Damiani, M.L.; de Macedo, J.A.; Porto, F.; Vangenot, C. A Conceptual View on Trajectories. Data Knowl. Eng. 2008, 65, 126–146. [Google Scholar] [CrossRef] [Green Version]
- Rein, R.; Memmert, D. Big Data and Tactical Analysis in Elite Soccer: Future Challenges and Opportunities for Sports Science. Springerplus 2016, 5, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Sarmento, H.; Marcelino, R.; Anguera, M.T.; CampaniÇo, J.; Matos, N.; LeitÃo, J.C. Match Analysis in Football: A Systematic Review. J. Sports Sci. 2014, 32, 1831–1843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boero, R.; Bravo, G.; Castellani, M.; Squazzoni, F. Why Bother with What Others Tell You? An Experimental Data-Driven Agent-Based Model. J. Artif. Soc. Soc. Simul. 2010, 13, 6. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.-H.; Venkatachalam, R. Agent-Based Modelling as a Foundation for Big Data. J. Econ. Methodol. 2017, 24, 362–383. [Google Scholar] [CrossRef] [Green Version]
- Bell, D.; Mgbemena, C. Data-Driven Agent-Based Exploration of Customer Behavior. Simulation 2018, 94, 195–212. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spatiotemporal | What is the probability of observing Aui at location l at time t, given that I know its attribute a? e.g., What is the probability of observing P1 with opponent P2 in the last 10 minutes of the game, given that I know P1’s stamina? | How frequently does Aui coincide with object o? e.g., How frequently does P1 coincide with the ball object in a game? | Does Aui set a trend for Auj? e.g., Does P1 mark –closely move with– P2? |
| Space | Is Aui’s spatial convex hull associated with its attribute a? e.g., Is P1’s spatial convex hull associated with its pace? | What is the mean distance between Aui and geographic object o? e.g., What is the mean distance between P1 and the opponent’s goal? | Is there an overlap between Aui’s and Auj’s spatial convex hull? e.g., Is there an overlap between P1’s and P2’s spatial convex hull? |
| Time | Is Aui’s action n temporally independent from its attribute a? e.g., Is P1’s decision to carry the ball independent from its energy level? | What is the correlation between Aui‘s action n and event e? e.g., What is the correlation between P1‘s average speed and the time of the game? | How likely is that Aui performs action n after Auj executes it? e.g., How likely is that P1 starts running after P2 runs? |
| Attributes | Actors | Autonomous Agents |
| Spatio-temporal | Would Aui be at location l at time t if I change attribute a? e.g., Would P1 stay more with P2 in the last 10 minutes of a game if I decrease P1’s stamina? | How can I make Aui meet actor o? e.g., How can I make P1 meet the ball more in the second half of a game? | Would the probability of action n being performed by Auj change if I remove Aui? e.g., Would the probability of P1 passing the ball change in a game if I remove P2? |
| Space | Would Aui’s spatial convex hull be smaller if I change its attribute a? e.g., Would Aui’s spatial convex hull be smaller if I change its pace? | Would Aui execute action n if I increase its distance with actor o? e.g., Would P1 try to get the ball more if I expand its role-area? | Would Aui’s spatial convex hull change if I make Auj stop moving? e.g., Would P1’s spatial convex hull change if I decrease P2’s role-area? |
| Time | What would Aui’s action be at time t if I manipulate its attribute a? e.g., Would P1 run more in the last 10 minutes of a game if I increase its energy? | How likely is Aui to perform action n at time t2 if I make event e happen at time t1? e.g., How likely is P1 to run more in a game if P1’s team scores a goal at the beginning of a game? | What would be the likelihood of Aui performing action n, at time t if I make Auj perform the same action? e.g., What would be the likelihood of P1 starting to run, if I make P2 start running? |
| Attributes | Actors | Autonomous Agents |
| Spatio-temporal | Where would I have seen Aui at time t if its attribute a had been different? e.g., Would I have seen P1 with P2 more in the last 10 minutes of the game had P1’s stamina been higher? | Was Aui at location l to meet actor o? e.g., Would P1 have moved forward had the ball not been there? | What if Aui had not co-located with Auj at timet? e.g., What if P1 had not co-located with P2 at timet? |
| Space | Would Aui’s spatial convex hull have been smaller had its attribute a been different? e.g., Would P1’s spatial convex hull have been smaller if its pace had been lower? | Is distance to actor o the cause of action n taken by Aui? e.g., Would P1 have shot the ball had the opponent’s goal been further away? | Would Aui’s spatial convex hull have changed had Auj been further away on average? e.g., Would P1’s spatial convex hull have been bigger had P2 been further away on average? |
| Time | What would have Aui’s action been at time t if its attribute a had been different? e.g., Would P1 have run more at the last 10 minutes of the game had P1 had more energy? | Would Aui have performed action n at time t2 had event e happened? e.g., Would P1 have run more if its team had scored a goal at the beginning of the game? | Would Aui have performed action n had Auj not performed it? e.g., Would P1 have run at time t had P2 not run? |
| Attributes | Actors | Autonomous Agents |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahimi, S.; Moore, A.B.; Whigham, P.A. Beyond Objects in Space-Time: Towards a Movement Analysis Framework with ‘How’ and ‘Why’ Elements. ISPRS Int. J. Geo-Inf. 2021, 10, 190. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030190
Rahimi S, Moore AB, Whigham PA. Beyond Objects in Space-Time: Towards a Movement Analysis Framework with ‘How’ and ‘Why’ Elements. ISPRS International Journal of Geo-Information. 2021; 10(3):190. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030190
Chicago/Turabian StyleRahimi, Saeed, Antoni B. Moore, and Peter A. Whigham. 2021. "Beyond Objects in Space-Time: Towards a Movement Analysis Framework with ‘How’ and ‘Why’ Elements" ISPRS International Journal of Geo-Information 10, no. 3: 190. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030190