
An Integrated Graph Model for Spatial–Temporal Urban Crime Prediction Based on Attention Mechanism

Abstract
:1. Introduction
2. Materials and Methods
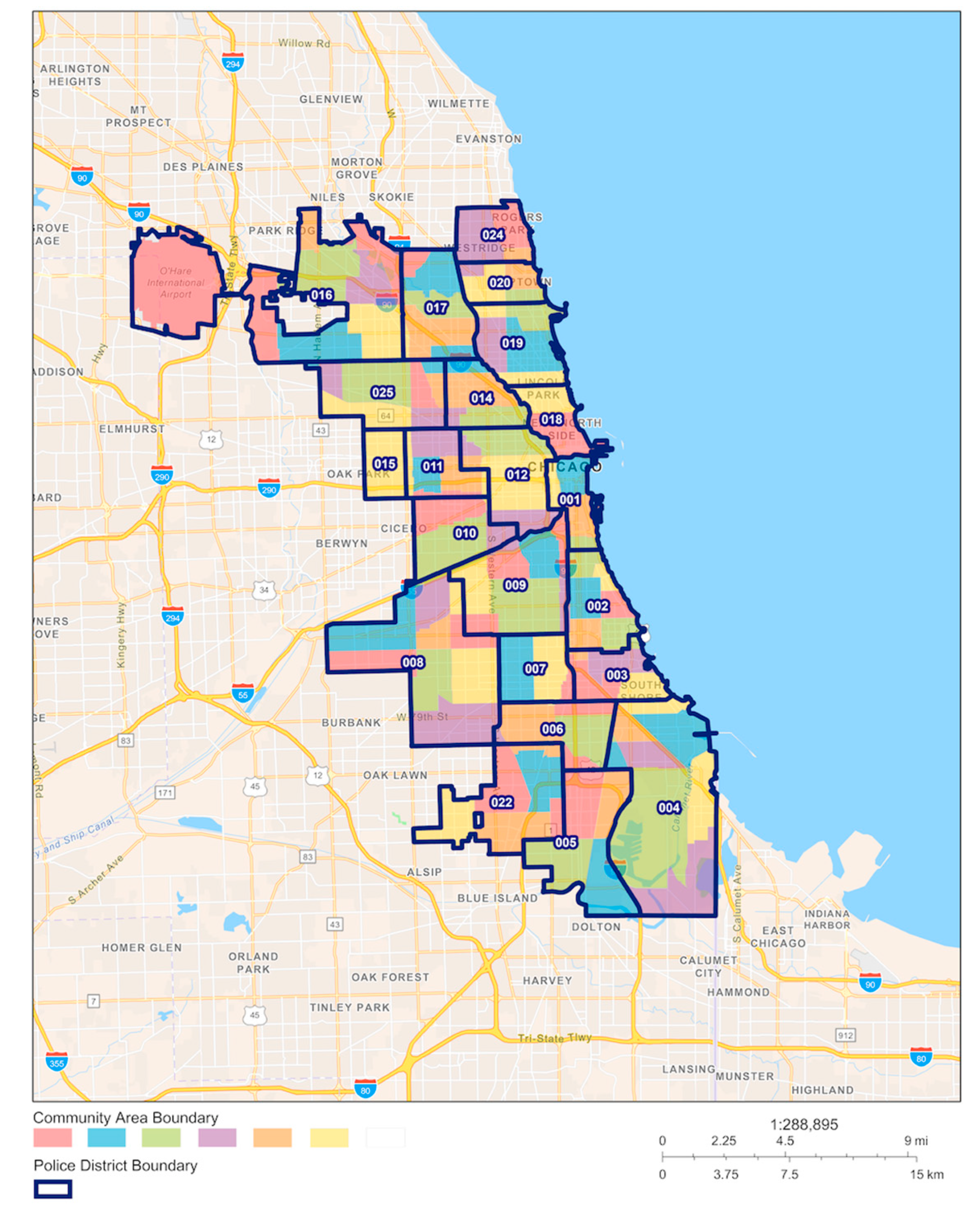
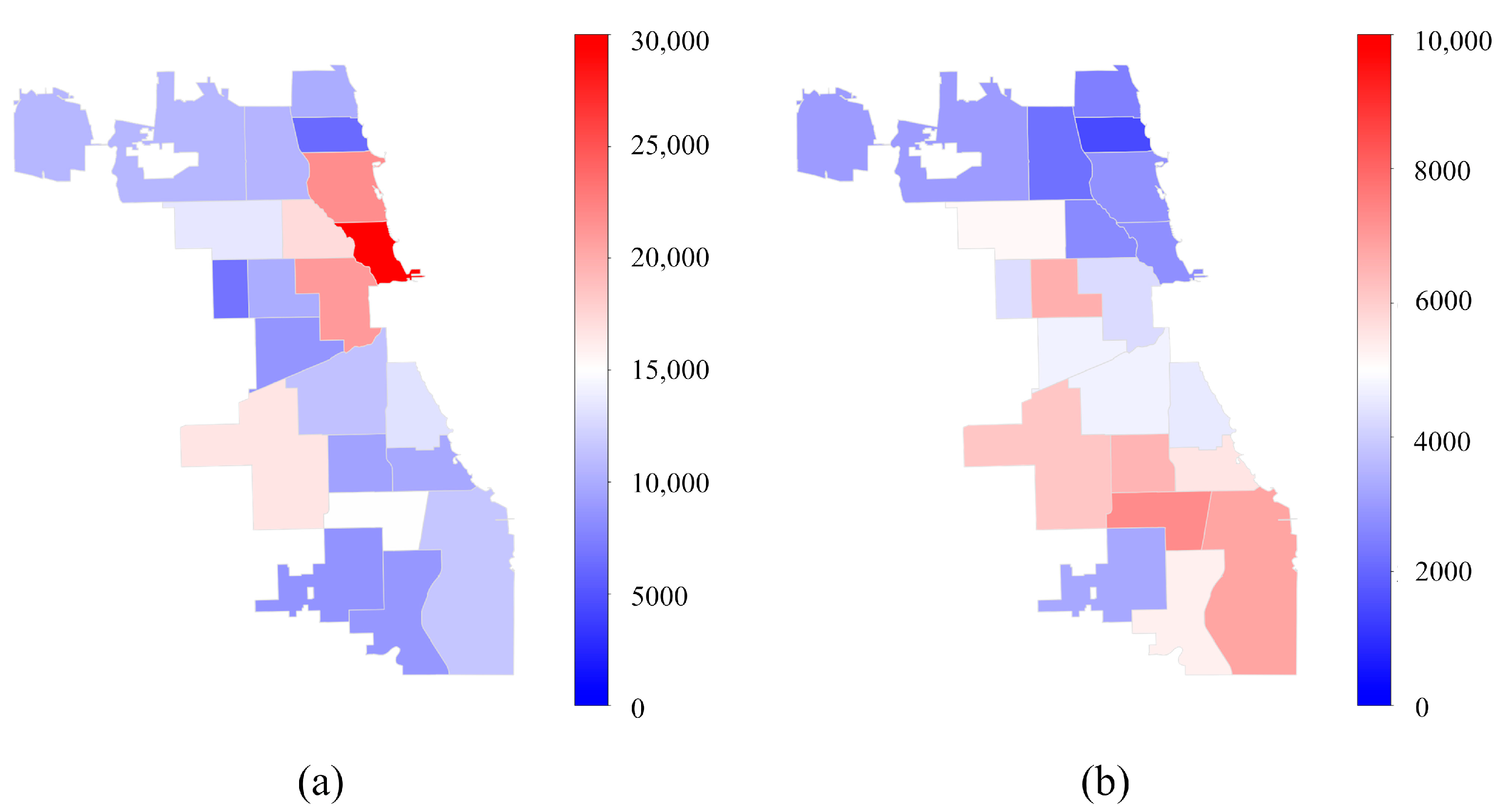
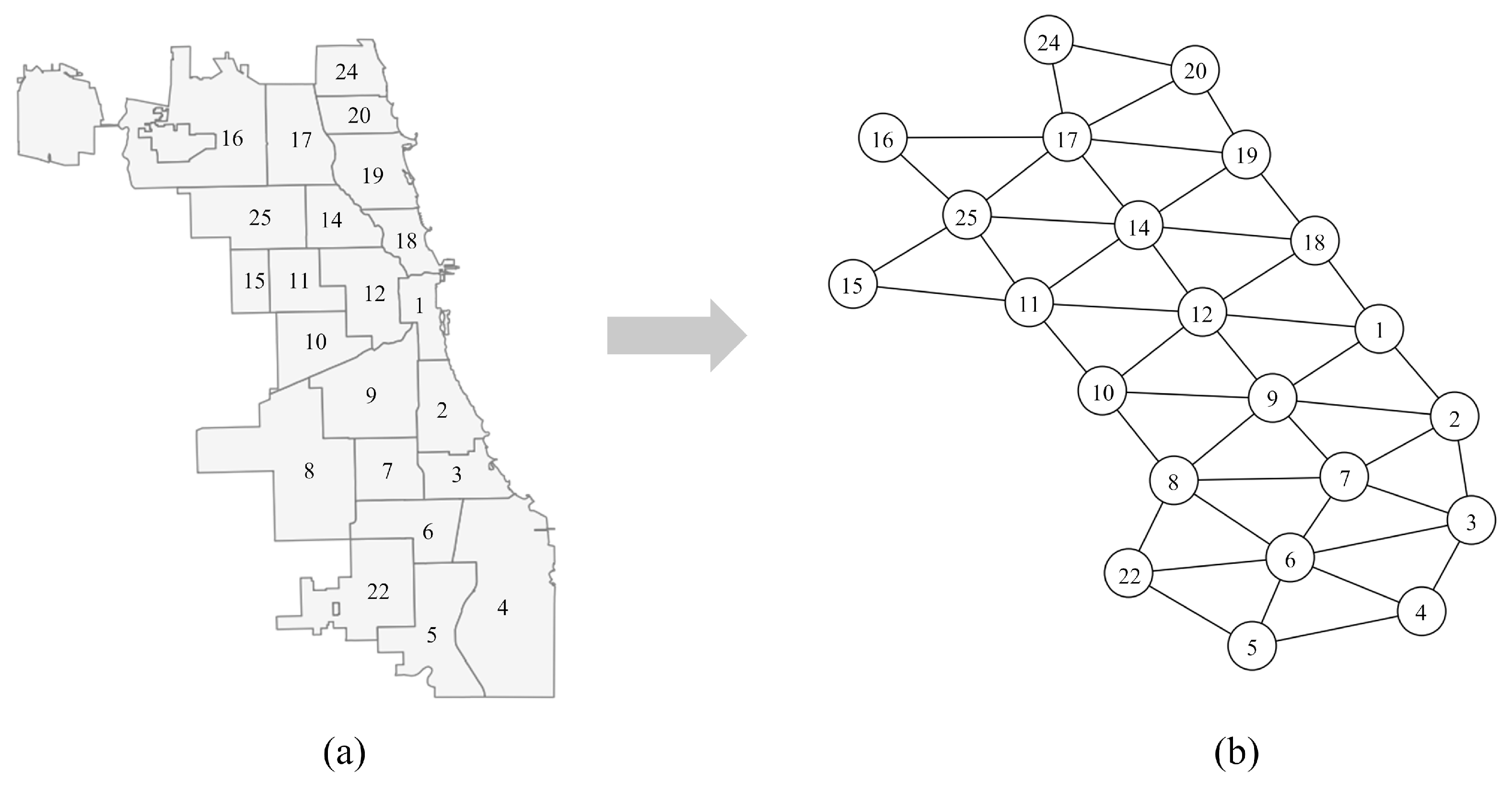
2.1. Study Area and Data Description
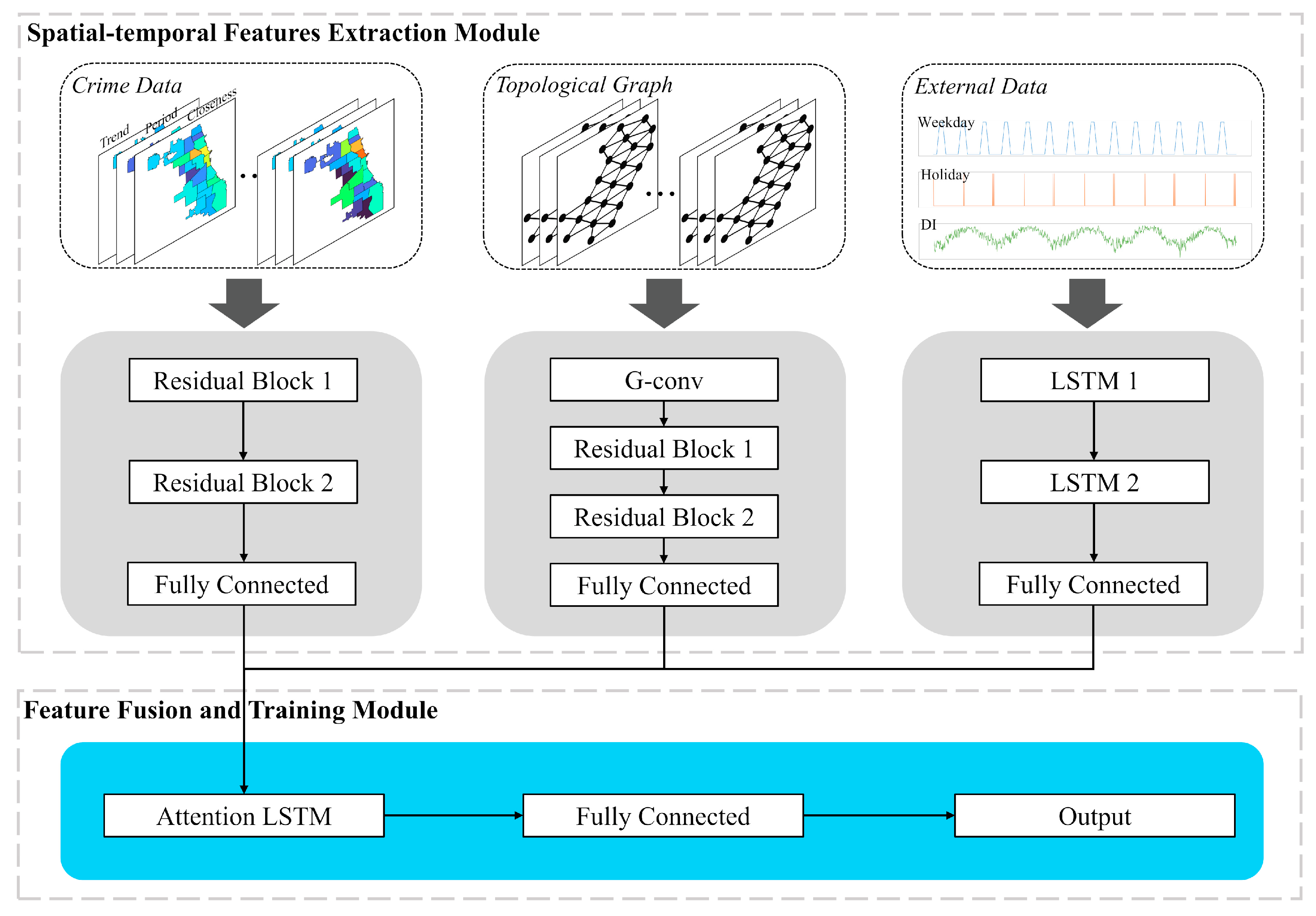
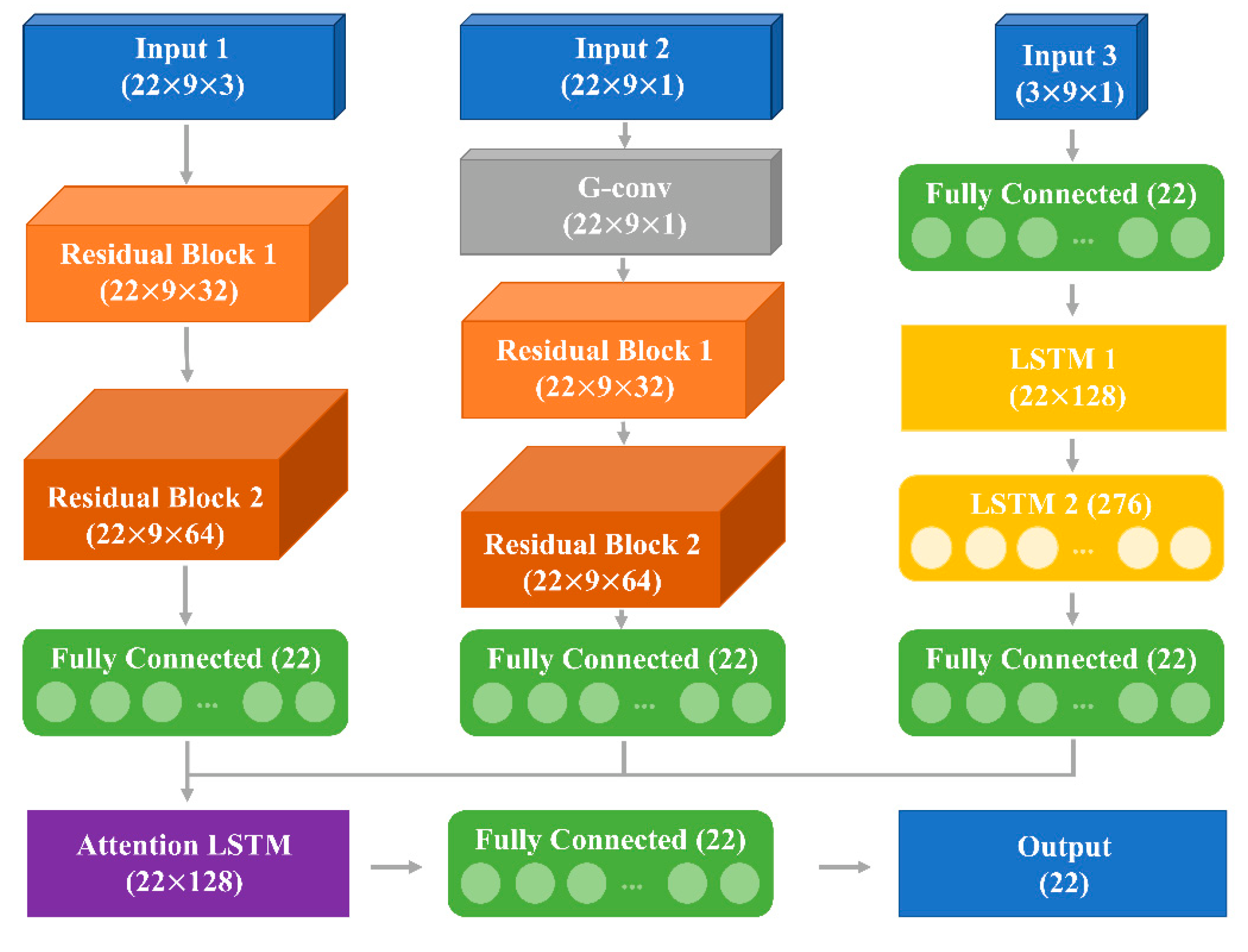
2.2. Model Framework
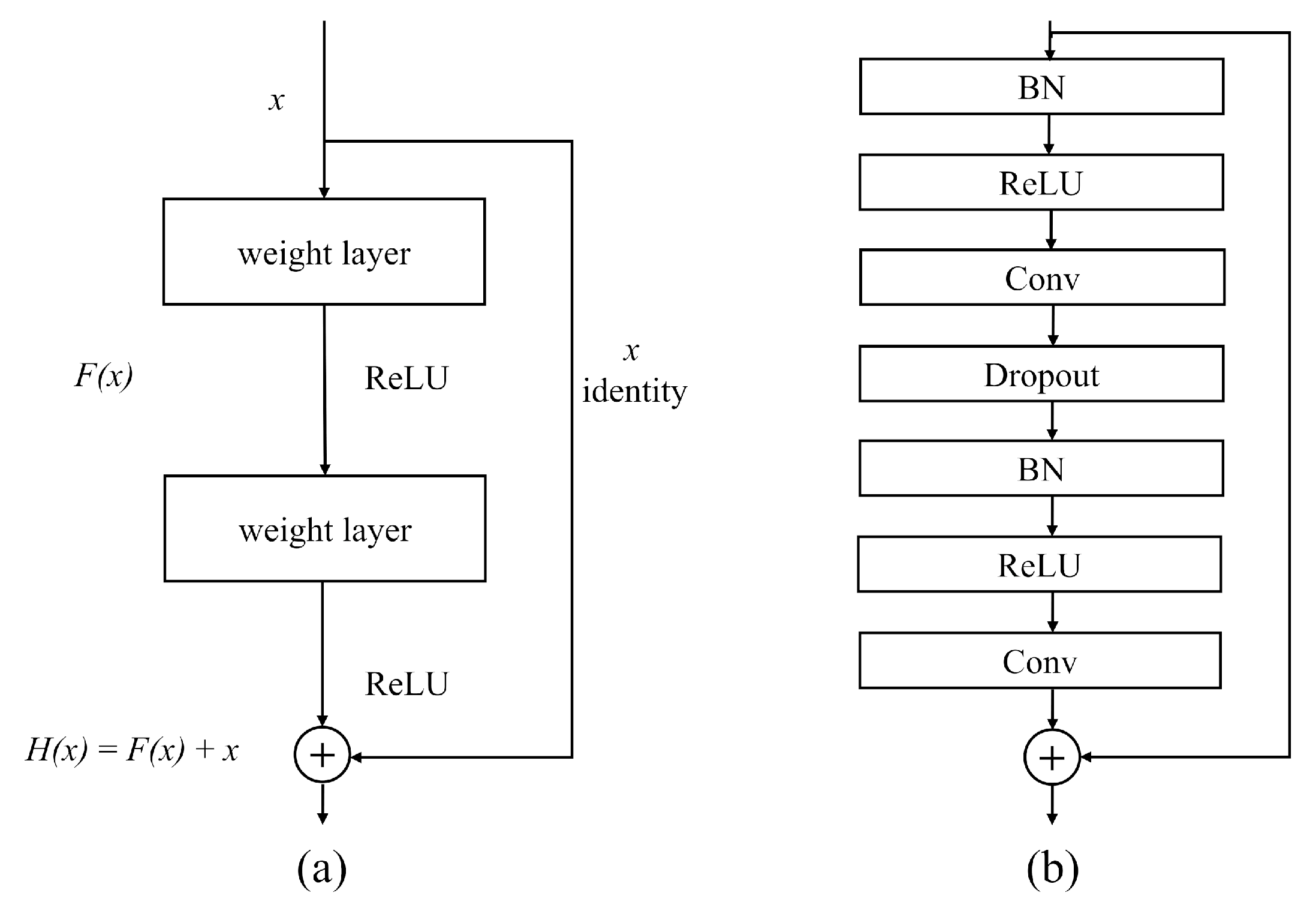
2.2.1. Spatial–Temporal Features Extraction Module
2.2.2. Feature Fusion and Training Module
2.3. Case Study
2.3.1. Model Configuration
2.3.2. Baseline Models
2.4. Evaluation Metrics
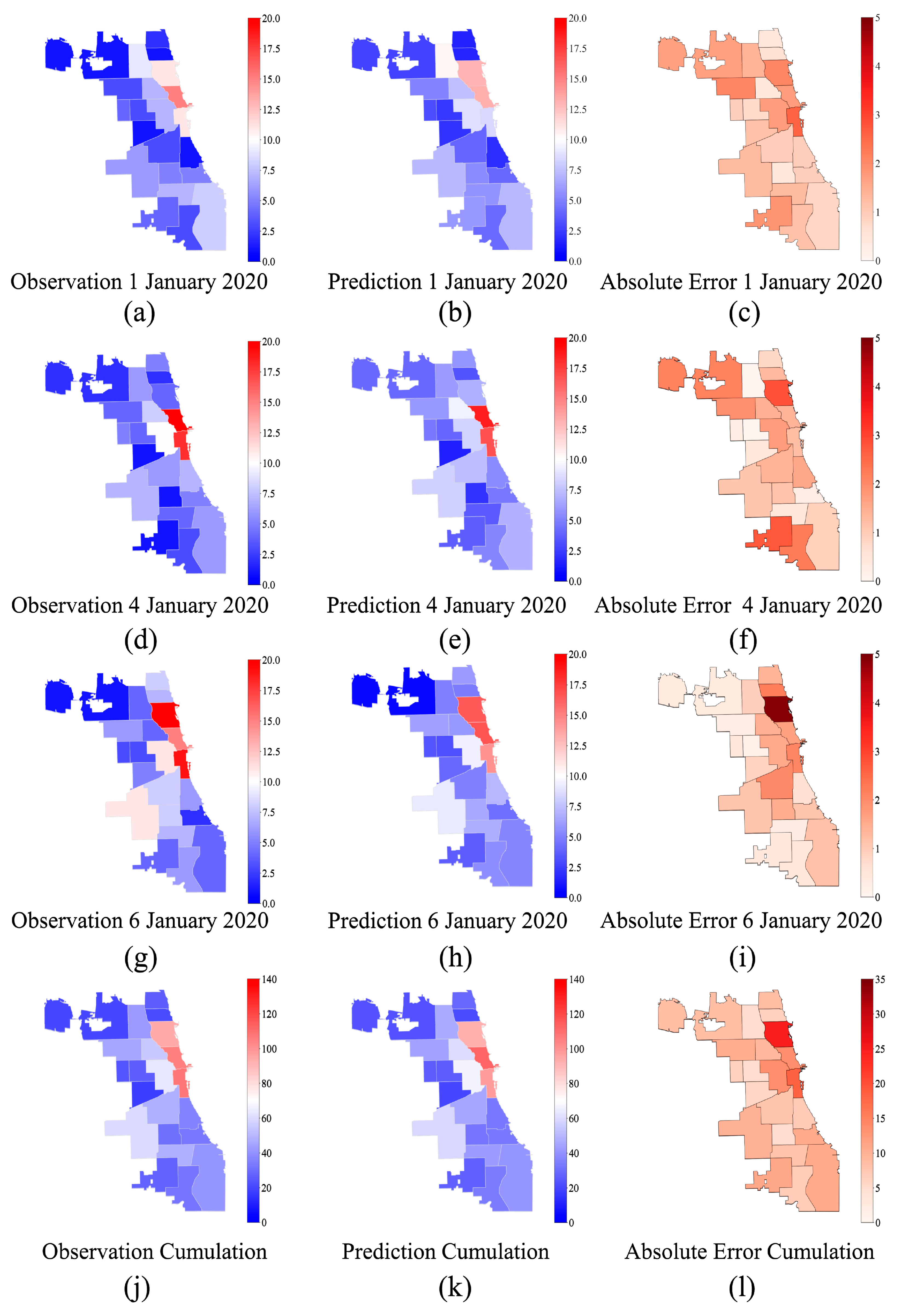
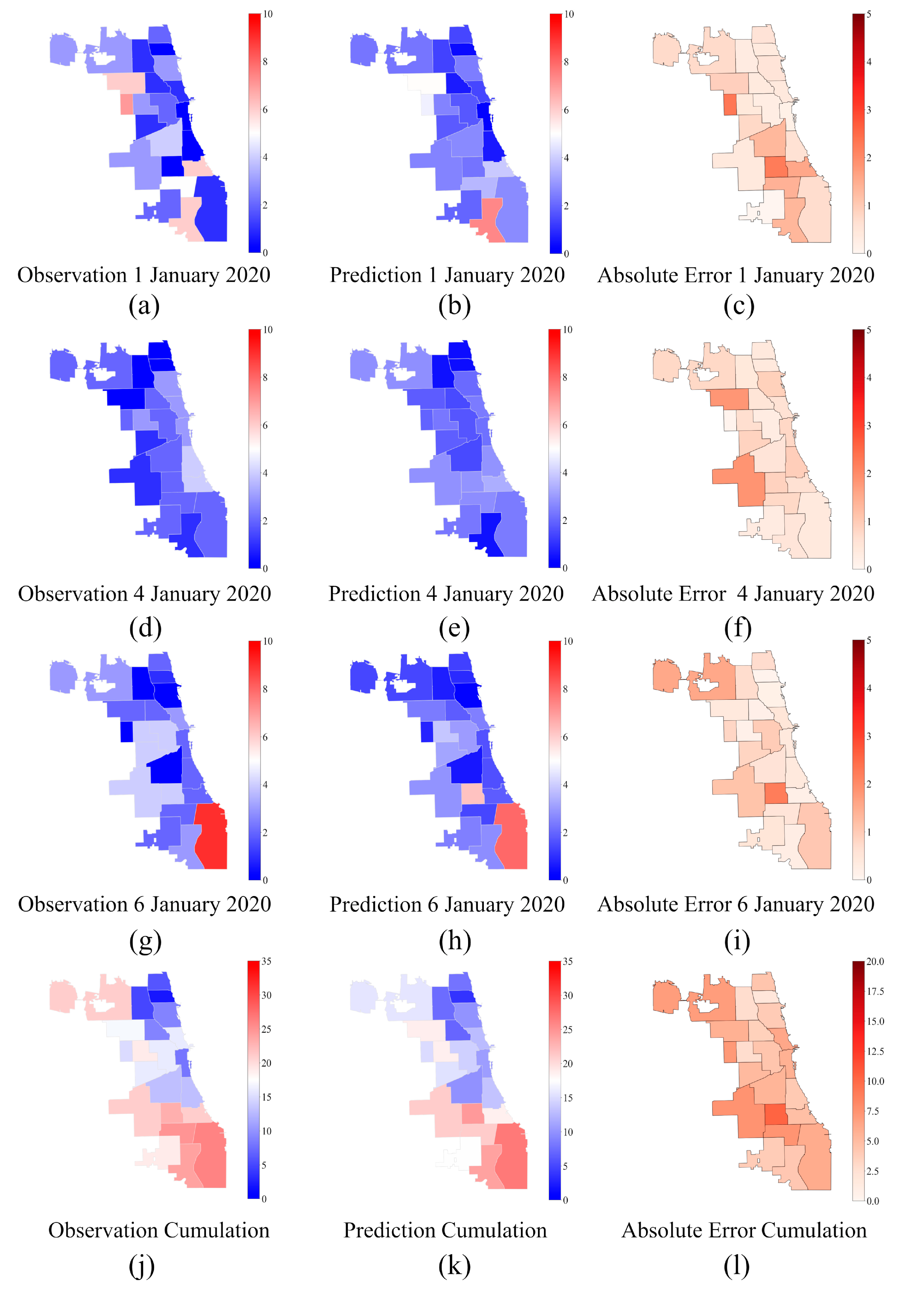
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Police District | Theft | Assault | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Standard deviation | Min | Max | Sum | Mean | Standard deviation | Min | Max | Sum | |
| 1st District | 18.754 | 7.397 | 3 | 108 | 34,376 | 1.939 | 1.472 | 0 | 9 | 3554 |
| 2nd District | 7.195 | 3.045 | 0 | 19 | 13,188 | 2.483 | 1.681 | 0 | 10 | 4552 |
| 3rd District | 5.350 | 2.472 | 0 | 15 | 9806 | 3.011 | 1.798 | 0 | 9 | 5519 |
| 4th District | 6.318 | 2.870 | 0 | 27 | 11,580 | 3.727 | 1.986 | 0 | 11 | 6831 |
| 5th District | 4.801 | 2.327 | 0 | 14 | 8801 | 2.883 | 1.825 | 0 | 12 | 5285 |
| 6th District | 8.178 | 3.172 | 0 | 26 | 14,991 | 3.982 | 2.130 | 0 | 12 | 7299 |
| 7th District | 5.160 | 2.497 | 0 | 15 | 9458 | 3.552 | 2.036 | 0 | 12 | 6510 |
| 8th District | 9.074 | 3.461 | 0 | 24 | 16,632 | 3.360 | 2.005 | 0 | 11 | 6158 |
| 9th District | 6.155 | 2.798 | 0 | 18 | 11,283 | 2.591 | 1.702 | 0 | 10 | 4750 |
| 10th District | 4.785 | 2.433 | 0 | 15 | 8771 | 2.586 | 1.683 | 0 | 10 | 4741 |
| 11th District | 5.447 | 2.514 | 0 | 15 | 9985 | 3.594 | 2.025 | 0 | 13 | 6588 |
| 12th District | 11.475 | 4.377 | 1 | 33 | 21,034 | 2.337 | 1.667 | 0 | 10 | 4283 |
| 14th District | 9.362 | 3.775 | 0 | 25 | 17,160 | 1.460 | 1.268 | 0 | 7 | 2676 |
| 15th District | 3.662 | 2.102 | 0 | 14 | 6712 | 2.346 | 1.583 | 0 | 9 | 4300 |
| 16th District | 5.761 | 2.814 | 0 | 20 | 10,559 | 1.649 | 1.320 | 0 | 8 | 3023 |
| 17th District | 5.706 | 2.703 | 0 | 16 | 10,459 | 1.199 | 1.133 | 0 | 6 | 2197 |
| 18th District | 18.043 | 6.323 | 3 | 42 | 33,072 | 1.518 | 1.320 | 0 | 9 | 2782 |
| 19th District | 11.890 | 4.442 | 1 | 47 | 21,795 | 1.536 | 1.251 | 0 | 7 | 2815 |
| 20th District | 3.399 | 2.021 | 0 | 12 | 6231 | 0.803 | 0.903 | 0 | 5 | 1472 |
| 22nd District | 4.687 | 2.470 | 0 | 17 | 8592 | 1.783 | 1.349 | 0 | 7 | 3269 |
| 24th District | 5.451 | 2.674 | 0 | 17 | 9991 | 1.362 | 1.215 | 0 | 7 | 2497 |
| 25th District | 7.389 | 2.998 | 0 | 18 | 13,544 | 2.809 | 1.751 | 0 | 11 | 5148 |
| Total | 168.041 | 28.187 | 61 | 309 | 308,020 | 52.509 | 10.937 | 23 | 88 | 96,249 |
Appendix B
References
- Rummens, A.; Hardyns, W.; Pauwels, L. The use of predictive analysis in spatiotemporal crime forecasting: Building and testing a model in an urban context. Appl. Geogr. 2017, 86, 255–261. [Google Scholar] [CrossRef]
- Kwon, E.; Jung, S.; Lee, J. Artificial Neural Network Model Development to Predict Theft Types in Consideration of Environmental Factors. ISPRS Int. J. Geo-Inf. 2021, 10, 99. [Google Scholar] [CrossRef]
- Sherman, L.W.; Gartin, P.R.; Buerger, M.E. Hot spots of predatory crime: Routine activities and the criminology of place. Criminology 1989, 27, 27–56. [Google Scholar] [CrossRef]
- He, Z.; Tao, L.; Xie, Z.; Xu, C. Discovering spatial interaction patterns of near repeat crime by spatial association rules mining. Sci. Rep. 2020, 10, 17262. [Google Scholar] [CrossRef]
- Gu, H.; Chen, P.; Li, H. Review and prospect of the research on the methods of crime space-time prediction. J. Earth Inf. Sci. 2021, 23, 43–57. [Google Scholar]
- Lamari, Y.; Freskura, B.; Abdessamad, A.; Eichberg, S.; de Bonviller, S. Predicting Spatial Crime Occurrences through an Efficient Ensemble-Learning Model. ISPRS Int. J. Geo-Inf. 2020, 9, 645. [Google Scholar] [CrossRef]
- Marques, S.C.; Ferreira, F.A.; Meidutė-Kavaliauskienė, I.; Banaitis, A. Classifying urban residential areas based on their exposure to crime: A constructivist approach. Sustain. Cities Soc. 2018, 39, 418–429. [Google Scholar] [CrossRef]
- Maiti, A.; Zhang, Q.; Sannigrahi, S.; Pramanik, S.; Chakraborti, S.; Cerda, A.; Pilla, F. Exploring spatiotemporal effects of the driving factors on COVID-19 incidences in the contiguous United States. Sustain. Cities Soc. 2021, 68, 102784. [Google Scholar] [CrossRef]
- Ingilevich, V.; Ivanov, S. Crime rate prediction in the urban environment using social factors. Procedia Comput. Sci. 2018, 136, 472–478. [Google Scholar] [CrossRef]
- Yu, H.; Liu, L.; Yang, B.; Lan, M. Crime Prediction with Historical Crime and Movement Data of Potential Offenders Using a Spatio-Temporal Cokriging Method. ISPRS Int. J. Geo-Inf. 2020, 9, 732. [Google Scholar] [CrossRef]
- Dash, S.K.; Safro, I.; Srinivasamurthy, R.S. Spatio-temporal prediction of crimes using network analytic approach. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 1912–1917. [Google Scholar]
- Chen, P.; Hu, X.; Chen, J. The application of fuzzy information granulation and support vector machine in crime forecasting. Sci. Technol. Eng. 2015, 35, 54–57. [Google Scholar]
- Pillai, R. Optimized Predictive Modelling to Unfold the Links of Crime with Education, Safety and Climate in Chicago; National College of Ireland: Dublin, Ireland, 2019. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. Handb. Brain Theory Neural Netw. 1995, 3361, 1995. [Google Scholar]
- Cheng, T.; Wang, J. Application of a dynamic recurrent neural network in spatio-temporal forecasting. In Information Fusion and Geographic Information Systems; Springer: St. Petersburg, Russia, 2007; pp. 173–186. [Google Scholar]
- Li, W.; Wen, L.; Chen, Y. Spatial—Temporal forecast research of property crime under the driven of urban traffic factors. Multimed. Tools Appl. 2016, 75, 17669–17687. [Google Scholar]
- Zhang, H.; Zhang, J.; Wang, Z.; Yin, H. An Adaptive Spatial Resolution Method Based on the ST-ResNet Model for Hourly Property Crime Prediction. ISPRS Int. J. Geo-Inf. 2021, 10, 314. [Google Scholar] [CrossRef]
- Qian, Y.; Pan, L.; Wu, P.; Xia, Z. GeST: A Grid Embedding based Spatio-Temporal Correlation Model for Crime Prediction. In Proceedings of the 2020 IEEE Fifth International Conference on Data Science in Cyberspace (DSC), Hong Kong, China, 27–30 July 2020; pp. 1–7. [Google Scholar]
- Zhang, T.; Ran, Y.; Wei, D. Application of Grid Management in Spatio-temporal Prediction of Crime. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 2745–2749. [Google Scholar]
- Han, X.; Hu, X.; Wu, H.; Shen, B.; Wu, J. Risk Prediction of Theft Crimes in Urban Communities: An Integrated Model of LSTM and ST-GCN. IEEE Access 2020, 8, 217222–217230. [Google Scholar] [CrossRef]
- Hu, T.; Zhu, X.; Duan, L.; Guo, W. Urban crime prediction based on spatio-temporal Bayesian model. PLoS ONE 2018, 13, e0206215. [Google Scholar] [CrossRef] [PubMed]
- Yi, F.; Yu, Z.; Zhuang, F.; Zhang, X.; Xiong, H. An integrated model for crime prediction using temporal and spatial factors. In Proceedings of the 2018 IEEE International Conference on Data Mining (ICDM), Singapore, 17–20 November 2018; pp. 1386–1391. [Google Scholar]
- Sun, J.; Yue, M.; Lin, Z.; Yang, X.; Nocera, L.; Kahn, G.; Shahabi, C. CrimeForecaster: Crime Prediction by Exploiting the Geographical Neighborhoods’ Spatiotemporal Dependencies. In Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases, Ghent, Belgium, 14–18 September 2020; pp. 52–67. [Google Scholar]
- Chen, X.; Cho, Y.; Jang, S.Y. Crime prediction using Twitter sentiment and weather. In Proceedings of the 2015 Systems and Information Engineering Design Symposium, Charlottesville, VA, USA, 24–24 April 2015; pp. 63–68. [Google Scholar]
- Zhao, X.; Tang, J. Modeling temporal-spatial correlations for crime prediction. In Proceedings of the 2017 ACM on Conference on Information and Knowledge Management, Singapore, 6–10 November 2017; pp. 497–506. [Google Scholar]
- Wang, B.; Yin, P.; Bertozzi, A.L.; Brantingham, P.J.; Osher, S.J.; Xin, J. Deep learning for real-time crime forecasting and its ternarization. Chin. Ann. Math. Ser. B 2019, 40, 949–966. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Chen, P.; Huang, H.; Sun, T.; Li, D. Contrasting impacts of heat stress on violent and nonviolent robbery in Beijing, China. Nat. Hazards 2017, 87, 961–972. [Google Scholar] [CrossRef]
- Hu, X.; Wu, J.; Chen, P.; Sun, T.; Li, D. Impact of climate variability and change on crime rates in Tangshan, China. Sci. Total Environ. 2017, 609, 1041–1048. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Xiong, X.; Abramson, M.J.; Li, S.; Guo, Y. Association between ambient temperature and sex offense: A case-crossover study in seven large US cities, 2007–2017. Sustain. Cities Soc. 2021, 69, 102828. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Loey, M.; Manogaran, G.; Taha, M.H.N.; Khalifa, N.E.M. Fighting against COVID-19: A novel deep learning model based on YOLO-v2 with ResNet-50 for medical face mask detection. Sustain. Cities Soc. 2021, 65, 102600. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 630–645. [Google Scholar]
- Wang, B.; Zhang, D.; Zhang, D.; Brantingham, P.J.; Bertozzi, A.L. Deep learning for real time crime forecasting. arXiv 2017, arXiv:1707.03340. [Google Scholar]
- Lu, L.; Lyu, B. Reducing energy consumption of Neural Architecture Search: An inference latency prediction framework. Sustain. Cities Soc. 2021, 67, 102747. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, C. Spatiotemporal Graph Convolutional Network for Multi-Scale Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2022, 11, 102. [Google Scholar] [CrossRef]
- Bai, J.; Zhu, J.; Song, Y.; Zhao, L.; Hou, Z.; Du, R.; Li, H. A3t-gcn: Attention temporal graph convolutional network for traffic forecasting. ISPRS Int. J. Geo-Inf. 2021, 10, 485. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, F.; Guo, Y.; Li, X. Multi-graph convolutional network for short-term passenger flow forecasting in urban rail transit. IET Intell. Transp. Syst. 2020, 14, 1210–1217. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Yan, J.; Hou, M. Predicting Time Series of Theft Crimes Based on LSTM Network. Data Anal. Knowl. Discov. 2020, 4, 84–91. [Google Scholar]
- Mao, W.; Wang, W.; Jiao, L.; Zhao, S.; Liu, A. Modeling air quality prediction using a deep learning approach: Method optimization and evaluation. Sustain. Cities Soc. 2021, 65, 102567. [Google Scholar] [CrossRef]
- Treisman, A.M.; Gelade, G. A feature-integration theory of attention. Cogn. Psychol. 1980, 12, 97–136. [Google Scholar] [CrossRef]
- Li, Y.; Tong, Z.; Tong, S.; Westerdahl, D. A data-driven interval forecasting model for building energy prediction using attention-based LSTM and fuzzy information granulation. Sustain. Cities Soc. 2022, 76, 103481. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, Z.; Kong, D.; Han, H.; Zhao, Y. EA-LSTM: Evolutionary attention-based LSTM for time series prediction. Knowl. Based Syst. 2019, 181, 104785. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Kang, M. Financial series prediction using Attention LSTM. arXiv 2019, arXiv:1902.10877. [Google Scholar]
- Box, G.E.; Pierce, D.A. Distribution of residual autocorrelations in autoregressive-integrated moving average time series models. J. Am. Stat. Assoc. 1970, 65, 1509–1526. [Google Scholar] [CrossRef]
- Hoerl, A.E.; Kennard, R.W. Ridge regression: Biased estimation for nonorthogonal problems. Technometrics 1970, 12, 55–67. [Google Scholar] [CrossRef]
- Awad, M.; Khanna, R. Support vector regression. In Efficient Learning Machines; Springer: Berkeley, CA, USA, 2015; pp. 67–80. [Google Scholar]
- Alves, L.G.; Ribeiro, H.V.; Rodrigues, F.A. Crime prediction through urban metrics and statistical learning. Phys. A Stat. Mech. Its Appl. 2018, 505, 435–443. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; He, T.; Benesty, M.; Khotilovich, V.; Tang, Y.; Cho, H. Xgboost: Extreme gradient boosting. R Package Version 0.4-2 2015, 1, 1–4. [Google Scholar]
- Cortez, B.; Carrera, B.; Kim, Y.-J.; Jung, J.-Y. An architecture for emergency event prediction using LSTM recurrent neural networks. Expert Syst. Appl. 2018, 97, 315–324. [Google Scholar] [CrossRef]
- Duan, L.; Hu, T.; Cheng, E.; Zhu, J.; Gao, C. Deep convolutional neural networks for spatiotemporal crime prediction. In Proceedings of the International Conference on Information and Knowledge Engineering (IKE), Monte Carlo Resort, Las Vegas, NV, USA, 17–20 July 2017; pp. 61–67. [Google Scholar]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.-K.; Woo, W.-C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; pp. 802–810. [Google Scholar]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Shen, B.; Hu, X.; Wu, H. Impacts of climate variations on crime rates in Beijing, China. Sci. Total Environ. 2020, 725, 138190. [Google Scholar] [CrossRef]











| Feature Name | Description |
|---|---|
| Weekend | The feature “Weekend” represents whether the day is a weekday or a weekend. |
| Holiday | The feature “Holiday” represents whether the day is a holiday or not. |
| DI | The heat stress index DI is calculated according to temperature, humidity, and wind speed (as shown in Appendix B). |
| Baseline Models. | Specific Configurations |
|---|---|
| ARIMA | The best ARIMA results are obtained automatically by Expert Modeler in the Statistical Package for the Social Sciences (SPSS) software. |
| Ridge Regression | The hyperparameters of ridge regression are obtained automatically by the RidgeCV class in the scikit-learn library. |
| SVR | The kernel of SVR is set as a radial-basis function, the regularization parameter C is set as 1.0, and the tolerance for stopping criterion is set as 0.001. |
| Random Forest | The number of trees in random forest is set as 100, and the maximum tree depth is set as 10. |
| XGBoost | The number of iterations is set as 100, and the maximum tree depth is set as 10. |
| LSTM | The LSTM has two kernel layers (each containing 100 neurons), and the learning rate is set as 0.0001. |
| CNN | The CNN has two kernel layers, the number of filters is set as 32 and 64, the size of the kernel is set as 3 × 3, the input length is set as 12, and the learning rate is set as 0.005. |
| Conv-LSTM | The number of Conv-LSTM layers is set as 2 with 32 and 64 filters, respectively, the kernel size is 3 × 3, the input length is set as 12, and the learning rate is set as 0.005. |
| Model | Theft | Assault | ||
|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | |
| ARIMA | 3.3145 | 3.8003 | 1.7594 | 2.1025 |
| Ridge Regression | 2.9168 | 3.4998 | 1.4917 | 1.9215 |
| SVR | 2.8030 | 3.3711 | 1.4609 | 1.8598 |
| Random Forest | 2.5064 | 2.9996 | 1.3191 | 1.5958 |
| XGBoost | 2.5114 | 3.0037 | 1.3218 | 1.5818 |
| LSTM | 1.8379 | 2.2395 | 1.1462 | 1.3778 |
| CNN | 1.4972 | 1.8079 | 0.8981 | 1.0819 |
| Conv-LSTM | 1.5574 | 1.8736 | 0.8269 | 0.9863 |
| Our Model | 1.3778 | 1.6318 | 0.7457 | 0.8851 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, M.; Hu, X.; Cai, J.; Han, X.; Yuan, S. An Integrated Graph Model for Spatial–Temporal Urban Crime Prediction Based on Attention Mechanism. ISPRS Int. J. Geo-Inf. 2022, 11, 294. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050294
Hou M, Hu X, Cai J, Han X, Yuan S. An Integrated Graph Model for Spatial–Temporal Urban Crime Prediction Based on Attention Mechanism. ISPRS International Journal of Geo-Information. 2022; 11(5):294. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050294
Chicago/Turabian StyleHou, Miaomiao, Xiaofeng Hu, Jitao Cai, Xinge Han, and Shuaiqi Yuan. 2022. "An Integrated Graph Model for Spatial–Temporal Urban Crime Prediction Based on Attention Mechanism" ISPRS International Journal of Geo-Information 11, no. 5: 294. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050294