A Harmonized Data Model for Noise Simulation in the EU
by
 , ,
, ,
Kavisha Kumar
1,*,† ,
,
Hugo Ledoux
1,†,
Richard Schmidt
2,†,
Theo Verheij
2,† and
Jantien Stoter
1,† 1
3D Geoinformation, Delft University of Technology, Julianalaan 134, 2628 BL Delft, The Netherlands
2
DGMR B.V., 2511 VB Den Haag, The Netherlands
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
ISPRS Int. J. Geo-Inf. 2020, 9(2), 121; https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9020121
Submission received: 18 January 2020
/
Revised: 1 February 2020
/
Accepted: 17 February 2020
/
Published: 21 February 2020
Abstract
:This paper presents our implementation of a harmonized data model for noise simulations in the European Union (EU). Different noise assessment methods are used by different EU member states (MS) for estimating noise at local, regional, and national scales. These methods, along with the input data extracted from the national registers and databases, as well as other open and/or commercially available data, differ in several aspects and it is difficult to obtain comparable results across the EU. To address this issue, a common framework for noise assessment methods (CNOSSOS-EU) was developed by the European Commission’s (EC) Joint Research Centre (JRC). However, apart from the software implementations for CNOSSOS, very little has been done for the practical guidelines outlining the specifications for the required input data, metadata, and the schema design to test the real-world situations with CNOSSOS. We describe our approach for modeling input and output data for noise simulations and also generate a real world dataset of an area in the Netherlands based on our data model for simulating urban noise using CNOSSOS.
1. Introduction
Urban noise is a major source of discomfort and annoyance among the residents in urban areas; more than 44% of the EU population is regularly exposed to high levels of road traffic and industrial noise that pose serious ill effects on public health [1]. Automobiles, railways, airways, industrial activities, and use of public announcement systems like loudspeakers—all contribute to urban noise. Regular monitoring and mapping of urban noise levels is often legally prescribed for the government, municipal officials, city planners, and various scientific organizations.
The European Union (EU) has formulated the 2002/49/EC Environmental Noise Directive (END) as a common management plan to deal with urban noise [2]. The Directive requires EU MS to determine the exposure of an individual to environmental noise through strategic noise mapping and to make action plans to reduce noise, where necessary [2]. Different EU MS have developed their own noise assessment methods and guidelines for estimating noise at local, regional, and national scales, e.g., RMW (Reken en meetvoorschrift Verkeerslawaai) in the Netherlands, NMPB (Nouvelle Méthode du Prévision de Bruit) in France, CRTN (Calculation of Road Traffic Noise) in UK, etc. Noise simulation studies for estimating the noise levels utilizes input data (spatial and non-spatial data) about the noise sources, noise measures (barriers and screens), and the built environment in computer implementations of these noise assessment methods [3]. As explained in Reference [4,5,6], these assessment methods, along with the input data extracted from the national registers and databases, as well as other open and commercial data, differ in several aspects, such as: (1) the method used to assign receivers on the façades of the buildings; (2) completeness, accuracy, and reliability of spatial data used; (3) approach followed to calculate the number of inhabitants in a building; (4) use of default data instead of actual real world data, such as maximum speed value for the speed of the vehicles, and so on. The heterogeneity in these methods and utilized input data makes it difficult to obtain comparable results across the EU [4,5,7].
To address this problem, a Common framework for NOise aSSessment methOdS (CNOSSOS-EU) was developed by the European Commission, in cooperation with the EU member states to enable a consistent and accurate reporting of strategic noise mapping by the MS, thus fulfilling their obligations under the END [8]. In 2015, an update to the END Annex II was published, which requires all EU MS to use CNOSSOS-EU from 31 December 2018 onward [9]. The core methodological framework of CNOSSOS for the EU noise mapping was developed during the first phase of the CNOSSOS-EU process (2009–2012) and is described in Reference [8]. The second phase of the CNOSSOS-EU process is the implementation phase. It was expected to cover the development of guidelines for the practical implementation of CNOSSOS, such as schema and database design for inputs and outputs of CNOSSOS-EU, use of common standards, etc. (discussed in Section 2.3). A proof of concept version of the initial ideas and features of the guidelines was established in the form of a website but was not made public, and no follow-ups have been done so far [8]. Further, Reference [8] lists only the outline of the proposed guidelines for CNOSSOS-EU.
For this paper, we focused on one of the crucial challenges of the implementation phase of the CNOSSOS-EU process, i.e., structuring of input and output data of noise simulation in a standardized format in order to be able to compare the outcomes of different noise studies across EU and to be able to better structure and exchange data between different stakeholders. An important work in this direction is the development of the CityGML Noise ADE (Application Domain Extension) by the Special Interest Group SIG 3D [10]. CityGML is an international 3D GIS (Geographic Information System) standard established by the international standardization organization for geoinformation: Open Geospatial Consortium [10]. The CityGML Noise ADE extends the existing CityGML schema by adding new classes and objects relevant for noise simulation. Many cities in the state of North-Rhine Westphalia, Germany, have modeled their noise data based on the CityGML Noise ADE [11]. However, it is set in a German context based on the German regulations for modeling noise caused by roads and railways only. Furthermore, it does not model industrial and aircraft noise (refer to Section 2.4 for the limitations of the current Noise ADE).
We describe in this paper our research on implementing a harmonized CityGML-based input/output data model for the CNOSSOS-based urban noise simulation for the EU. Section 2 describes the current status of the guidelines for data harmonization for different noise simulation studies using CNOSSOS-EU. In Section 2, we also review the existing noise assessment methods and provide an extensive inventory of the noise assessment methods and guidelines used in the third round of the strategic noise mapping in the EU (Table 1). Further, it is discussed how the heterogeneity in the methods and input data used in different noise simulation studies can affect the results. Finally, we present our framework for harmonizing input/output data model in CityGML for urban noise simulation in Section 4. In our approach, the existing CityGML Noise ADE is restructured and extended with new classes, attributes, and other concepts in accordance with the CNOSSOS-EU. Further, a real world dataset for an area in the Netherlands is also generated to model the data required for simulating urban noise using CNOSSOS-EU (Section 5). Our model could serve as a reference for future developments, applications, and validation of the CNOSSOS-EU methodological framework.
2. State-of-the-Art Review
2.1. An Inventory of the Existing Noise Assessment Methods
Previously, Article 6 and Annex II of the END recommended NMPB-Routes-96 [12], RMR (Reken-en Meetvoorschrift Railverkeerslawaai) [13], ECAC.CEAC Doc 29 (2nd Edition, 1997) [14], and ISO 9613-2 [15] as the interim computation methods for calculating road traffic noise, railway noise, aircraft noise, and industrial noise.
The END requires EU MS to produce strategic noise maps every five years. The first round of the strategic noise mapping was done in 2007, with a second round following in 2012, and the third round in 2017. There are comparability issues between the outcomes of the these three rounds owing to different reporting requirements and structure, differences in the input data used, a lack of common assessment method, missing/incomplete data of noise exposure, and data quality differences.
We report on the latest round (Round 3) of the strategic noise mapping. A variety of noise assessment methods were used in the third round. Table 1 provides an extensive inventory of the noise assessment methods and guidelines followed in the EU MS for the Round #3 of strategic noise mapping in 2017. In total, 30 different noise assessment methods and guidelines were counted. The French method NMPB was the most widely used road traffic noise assessment method, with 17 out of 28 MS using it. Ireland used the UK CRTN method, while CNOSSOS-EU was only used by Finland. Dutch RMR was applied by 16 out of 28 MS for calculating noise from railways. The computation methods for the aircraft and industrial noise, ECAC.CEAC Doc 29 and ISO 9613-2, were used by 18 and 14 MS, respectively.
While preparing this inventory, we encountered some problems. For instance, not all the EU MS submitted their data for evaluation to the Central Data Repository (CDR), such as Romania and Cyprus. Some MS had incomplete data, such as Ireland, Greece, and the UK. The Electronic Noise Data Reporting Mechanism [16] requires EU MS to submit metadata to the CDR, along with the main data files. This metadata contains information about the authority responsible for the data, spatial reference system and extent of the data, noise assessment methods and guidelines used, and so on. However, not all the MS submitted this metadata.
The heterogeneity in the assessment methods and utilized input data makes it difficult to obtain comparable results across the EU. These assessment methods differ in several aspects, such as the type (e.g., a single point or a line source of emission), position, and the height of the source, approach used to calculate the noise from a source, spectral bands used, and so on. Reference [7] provide a detailed comparison of the existing noise assessment methods used in different EU MS. For instance, roads are treated as a collection of incoherent point sources in NMPB and Nord 2000, but CRTN treats roads as a line source [4]. In general, the noise propagation calculations also differ in these methods. For instance, these methods differ in their noise propagation parameters, such as noise absorption by air and ground, inclination of ground, multiple reflections from nearby façades, noise barriers, and other obstacles. For instance, CRTN does not take atmospheric attenuation into account, which is not the case in NMPB nor Nord 2000. Another reason for the differences can be attributed to the databases and data registers used in association with the national methods, e.g., differences in the classification and speed of vehicles for the road traffic noise, classification of trains for the railway noise, etc. [17]. Reference [18] described an approach to automatically reconstruct input data for noise simulations in order to improve the efficiency and reliability, and consistency of different noise studies. For the quantitative analysis, the authors compared the differences between the simulation outcomes using the data created by their approach and the existing semi-automatic approach, for a study area in the Netherlands on about 1000 observation points. The differences in the noise levels ranged from -2.17 dB to 1.83 dB. The disparity in the use of different methods, input databases, and software can have a considerable impact on the overall calculations. However, some differences are just due to the local materials (like in case of the trains) and cannot be solved by having uniformity in method and input data. A common EU noise assessment method, along with a harmonized EU database of input data, is essential to achieve results of sufficient quality.
2.2. CNOSSOS-EU: Where Does It Stand?
CNOSSOS-EU represents a harmonized method to assess noise levels from the main sources of noise (road traffic, railway traffic, aircraft, and industries) across the EU and should replace national models for the next round of strategic noise mapping (2021/2022) [19]. Finland has already used the CNOSSOS-EU model in the 2017 END strategic noise mapping [20,21]. Some of the other MS have also started the implementation of the CNOSSOS-EU framework, and research has been going on to determine its adaptability. Reference [19] examined the applicability of CNOSSOS for legal purposes, such as limiting the maximum emission of a road, a railway and an industry, and controlling the maximum noise levels on façades of buildings in the Netherlands. Reference [22] compared ISO 9613-2 and CNOSSOS for industrial noise assessment of a large industrial plant in Poland. Reference [23] determined the compatibility of the old approach (XPS 31-133) with the upcoming one (CNOSSOS-EU Road) for calculating road noise levels for the city of Trento, Italy. Furthermore, Switzerland has updated its road traffic noise emission model (sonROAD18) based on CNOSSOS-EU [24]. CNOSSOS has also been implemented in noise simulation software, such as Geomilieu [25], MithraSIG [26], IMMI [27], Predictor-LimA [28], CadnaA [29], etc. In addition, new noise mapping systems, such as DYNAMAP [30], can be easily interfaced with CNOSSOS.
At present, CNOSSOS is not largely being used for many reasons, e.g., like the fact that it is still under development, it needs software implementations and data guidelines, Q&A needs to be done, it is new and still in the process being compared and analyzed, and so on. The CNOSSOS-EU framework would help in increasing the consistency among the action plans adopted by the EU MS on the basis of the results of the noise mapping and also would allow a better evaluation of the effectiveness of the action plans and the development of a basis for community measures by the commission to reduce noise emitted by the major noise sources. This would also allow the EU MS to concentrate more on the reliable implementation of common tools and guidelines for input data, as well as further development and maintenance, thus optimizing their efforts instead of coping with different assessment noise methods used for different purposes and with different capabilities and range of applicability, which is a highly demanding task in terms of both resources and time.
2.3. Present Guidelines for Data Harmonization for Noise Simulations Using the CNOSSOS-EU
Apart from the software implementations and validation experiments for CNOSSOS (mentioned in Section 2.2), very little has been done for the practical guidelines outlining the specifications for the data (spatial/non-spatial), schema design, standards, etc., for CNOSSOS. The CNOSSOS documentation [8] lists only the outline of the proposed guidelines for it. Designing a common underlying schema for the data to be used in CNOSSOS-based noise simulation can aid in obtaining comparable outcomes across the EU. Some of the data-related aspects mentioned (and not implemented) in the documentation include [8]:
- Data schema design:
- –
- inputs and outputs for CNOSSOS-EU,
- –
- data specification tables and schema diagram,
- –
- an INSPIRE-compliant, open and extensible standard,
- –
- rules and guidance on how additional objects and attributes may be added to the schema,
- –
- a common data format which allows interfacing with data providers, other data owners, and cross-border project liaison.
- GIS and dataset specifications:
- –
- GIS and END requirements,
- –
- terminologies and technical specifications of the GIS data and software,
- –
- GIS layers, scale, and accuracy: data model, data dictionary, data validation, reference system, metadata, and GML specification.
It was proposed that these aforementioned CNOSSOS-EU guidelines would be developed as an interactive web-based tool, which links to the specific aspects of the technical description [8]. There have been no follow-ups so far. Independent studies have been done by various researchers to model the data for use with CNOSSOS. For instance, Reference [31] discussed how existing datasets for roads can be used, while migrating from interim methods (NMPB-Routes-96) to CNOSSOS-EU. Reference [32] investigated the sensitivity of the CNOSSOS-EU framework with respect to the changes in meteorological conditions in Nordic countries. However, no semantic model exists for modeling the data for CNOSSOS-based noise simulations.
2.4. Existing CityGML Noise ADE
CityGML has the concept of ADE (Application Domain Extension) to extend its schema with new classes and objects which are not explicitly modeled in the existing CityGML modules [10,33]. ADEs ensure semantic and syntactic interoperability for the storage and exchange of application-specific information.
An END compliant CityGML noise ADE is documented in Reference [10] and is in accordance with the German regulations for noise assessment. The CityGML Noise ADE, extends the existing CityGML schema by adding new classes and attributes relevant to noise mapping. Many cities in the state of North-Rhine Westphalia, Germany, have implemented their 3D noise models based on the CityGML Noise ADE [11,34,35]. Three existing CityGML modules (Transportation, Building, CityFurniture) were extended to include noise-related data in CityGML.
The Transportation module contains new classes, e.g., NoiseRoadSegment and NoiseRailwaySegment, which are the segments of roads and railway lines. These objects have their own set of attributes, e.g., traffic flow, speed limits, surface type, etc. The geometry of these objects is derived from their respective parent classes: Road and Railway. It also contains a new feature type, Train, with attributes like train type, its speed, etc., to store the information about individual trains. Similarly, the Building module was extended to include noise attributes related to existing buildings, e.g., reflection from buildings, noise levels observed during the day and night, number of people living in the buildings, etc. Similarly, the CityFurniture module contains new class, NoiseCityFurnitureSegment, with new attributes for noise. All these noise attributes are derived based on the regulations issued by the Federal Government of Germany in accordance with END.
The current Noise ADE has some limitations, documented in Reference [36]. For instance, it only represents noise data arising from road traffic and railways and does not support industrial noise. Trams are also not included in the model. Further, no distinction is made between the speeds of different type of vehicles, e.g., motor cycles, light vehicles, and heavy vehicles. In addition, the noise ADE is set in the German context and is difficult to adapt to other EU MS.
3. Methodology
The main methodology in this paper is the literature review and the development of a data model for data harmonization for noise simulations. A systematic screening was carried out for the scientific literature, reports, and official data of the EU MS submitted to the Central Data Repository(CDR) (http://cdr.eionet.europa.eu/) of the European Environment Agency (EEA) for strategic noise mapping. As a part of our work, we have also been in contact with the stakeholders, such as the municipalities and the companies, to determine their requirements for input data to perform noise simulations. We put together an extensive inventory of the methods and guidelines for noise assessment used in the Round 3 of strategic noise mapping in the EU (Table 1). We briefly discuss how the disparity among these assessment methods and the input data can influence the results of noise simulations of different European countries. Furthermore, the need for a common European noise assessment method and a common input database for noise simulations is also highlighted.
Based on the findings from our review and discussions with the noise modeling experts, we focus here on the development of an harmonized input/output data model for noise simulations (Section 4). Our data model is based on CNOSSOS-EU because the 2015 update to the Annex II requires all the EU MS to use CNOSSOS-EU from 31 December 2018 onward for strategic noise mapping. We explored the CNOSSOS-EU guidelines and the following different data sources and models to understand the data requirements for noise simulations:
- Geluidsregister (https://www.rijkswaterstaat.nl/kaarten/geluidregister.aspx): the national noise register of the Netherlands,
- Dutch Information Model (IM) Geluid (https://github.com/Geonovum/IMG): the upcoming information and data exchange model for the noise data in the Netherlands,
- CityGML Noise ADE: A CityGML extension to model data accroding to the German regulations for noise assessment (explained in Section 2.4), and
- INSPIRE Directive (https://inspire.ec.europa.eu/): the spatial data infrastructure for the EU environmental policies and activities which may have an impact on the environment.
CityGML was selected as the best available solution to implement our data model for modeling the data of noise simulations. First, CityGML is the GML-based, open, semantic, 3D data model with the possibility to extend its data model with application-specific information, aka ADEs. Second, it has already been used in Germany for modeling noise-related data, i.e., the CityGML Noise ADE. We studied the existing CityGML Noise ADE to understand which elements are already present and which elements are missing in this data model and restructure it by introducing new elements (objects and attributes) so that it aligns with CNOSSOS-EU, IM Geluid Model, INSPIRE, etc.
4. Our Data Model for Noise Simulations: The eNoise ADE
Our eNoise ADE (extended Noise ADE) is realized as a Unified Modeling Language (UML) model and XSD schema. All resources (UML, XSD, and documentation) related to the eNoise ADE are available on our public GitHub repository: https://github.com/tudelft3d/eNoiseModel. Our data model covers the noise arising from the roads, the railways, and the industries; we do not model the aircraft noise in this research. The classes in the model are divided into 2 categories:
- existing classes, which are updated (Section 4.1) and
- new classes, which are introduced (Section 4.2).
To avoid any ambiguity, we separated the attributes and any other classes in our ADE based on their source, namely original CityGML, existing Noise ADE, geluidregister, Dutch IM Geluid, INSPIRE, and CNOSSOS-EU. Further, identifiers ‘noise’ and ‘enoise’ are used to distinguish between the attributes of the existing Noise ADE and our eNoise ADE. CityGML and GML identifiers remains the same as in the actual data model.
4.1. Existing Classes Which Are Updated
CityModel
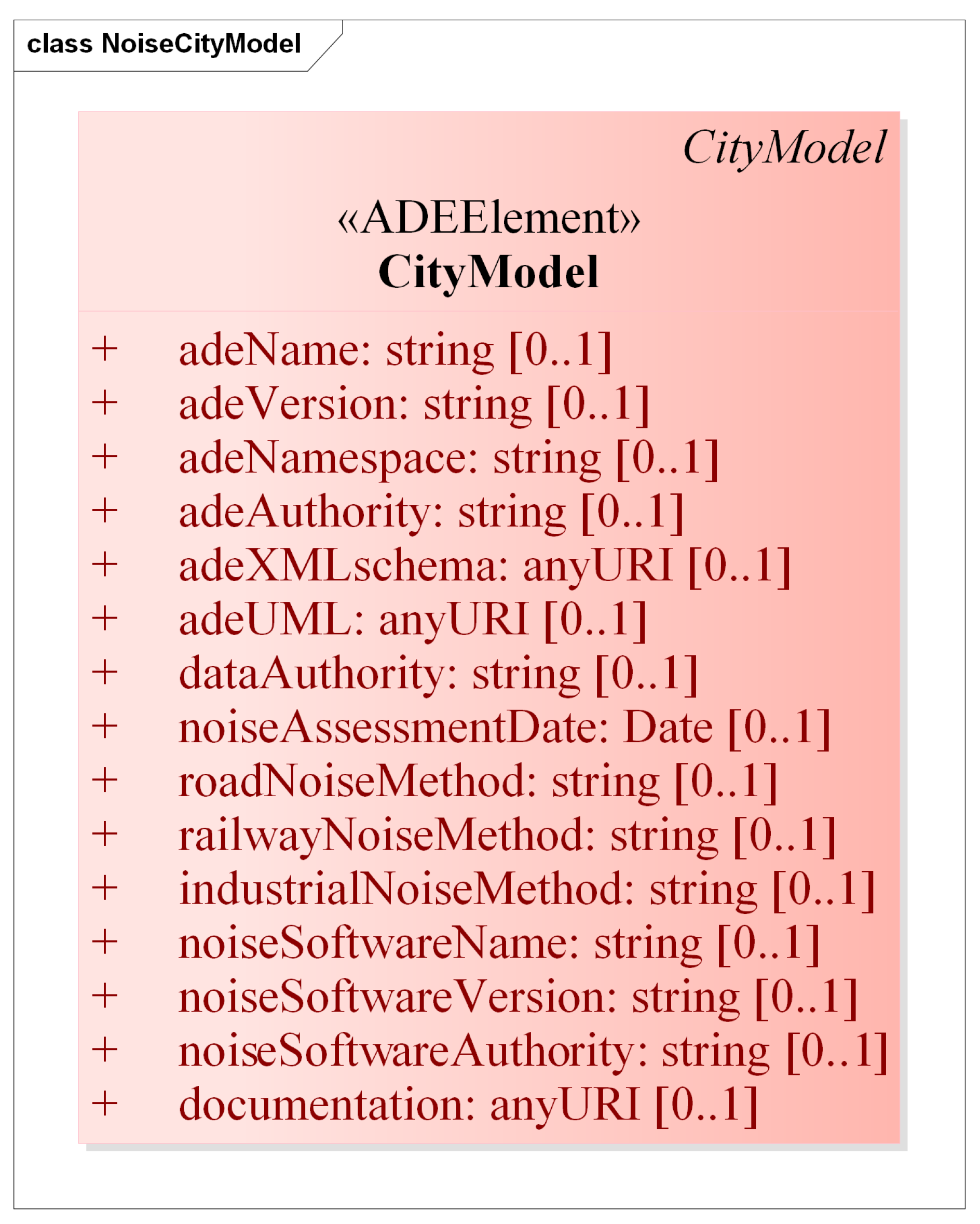
The CityGML CityModel class originally stores only the name (gml:name) and ID (gml:id) of the 3D city model present in the dataset. The CityModel class in our ADE is extended to store the metadata attributes related to our eNoise ADE (Figure 1), such as:
- name of the ADE (enoise:adeName),
- version of the ADE (enoise:adeVersion),
- namespace of the ADE (enoise:adeNamespace),
- authority responsible for the ADE (enoise:adeAuthority),
- link to the XML schema of the ADE (enoise:adeXMLschema),
- link to the UML model of the ADE (enoise:adeUML),
- authority responsible for the dataset (enoise:dataAuthority),
- assessment methods or guidelines used for the noise from the roads (enoise:roadNoise), the railways (enoise:railwayNoise), and the industries (enoise:industrialNoise),
- name (enoise:noiseSoftwareName), version (enoise:noiseSoftwareVersion), and organization/company (enoise:noiseSoftwareAuthority) of the software used for noise simulation, and
- link to any additional documentation (enoise:documentation).
These attributes are ISO 19115 compliant and based on the CityGML Metadata ADE developed by Reference [37].
Building
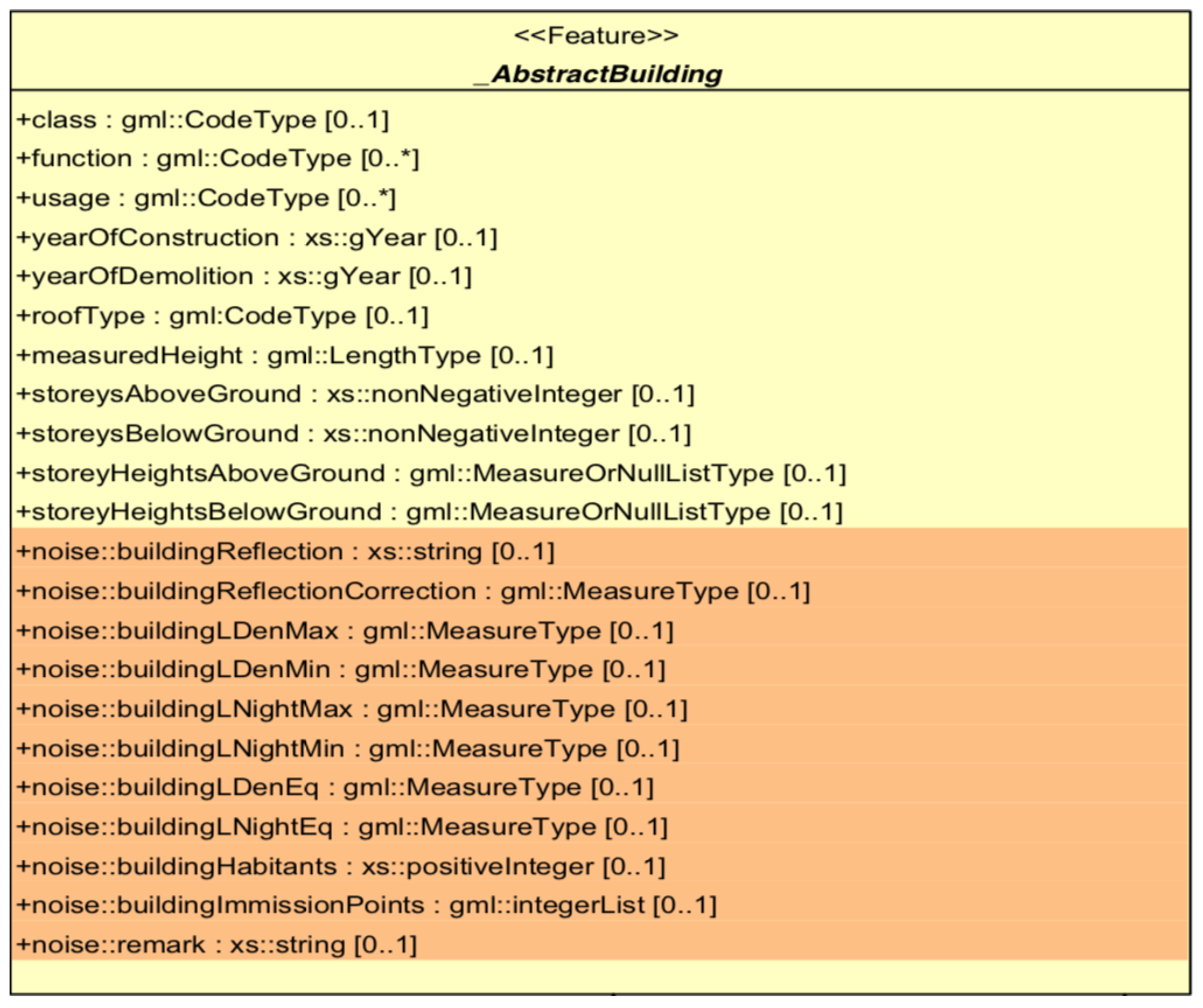
The CityGML Building class inherits the attributes and relationships from the abstract class _AbstractBuilding. The _AbstractBuilding already has some attributes to store the semantics of the building model in the dataset, such as the class of the building, its function (e.g., residential, public, or industry), its usage, year of construction, year of demolition, type of its roof, its measured height, and the number of the stories above and below ground and their heights (as shown in yellow in Figure 2).
The existing Noise ADE enriched the _AbstractBuilding class with noise-related attributes (Figure 3), such as:
- reflection from the building (noise:buildingReflection) and reflection correction in dB (noise:buildingReflectionCorrection),
- noise levels observed during the day, in the evening, and at night (noise:LDenMax, noise:LDenMin, noise:LNightMax, noise:LNightMin, noise:LDenEq, noise:LNightEq),
- number of inhabitants in the building (noise:buildingHabitants),
- number of apartments in the building (noise:buildingAppartments), and
- a list of emission points (noise:buildingImmissionPoints).
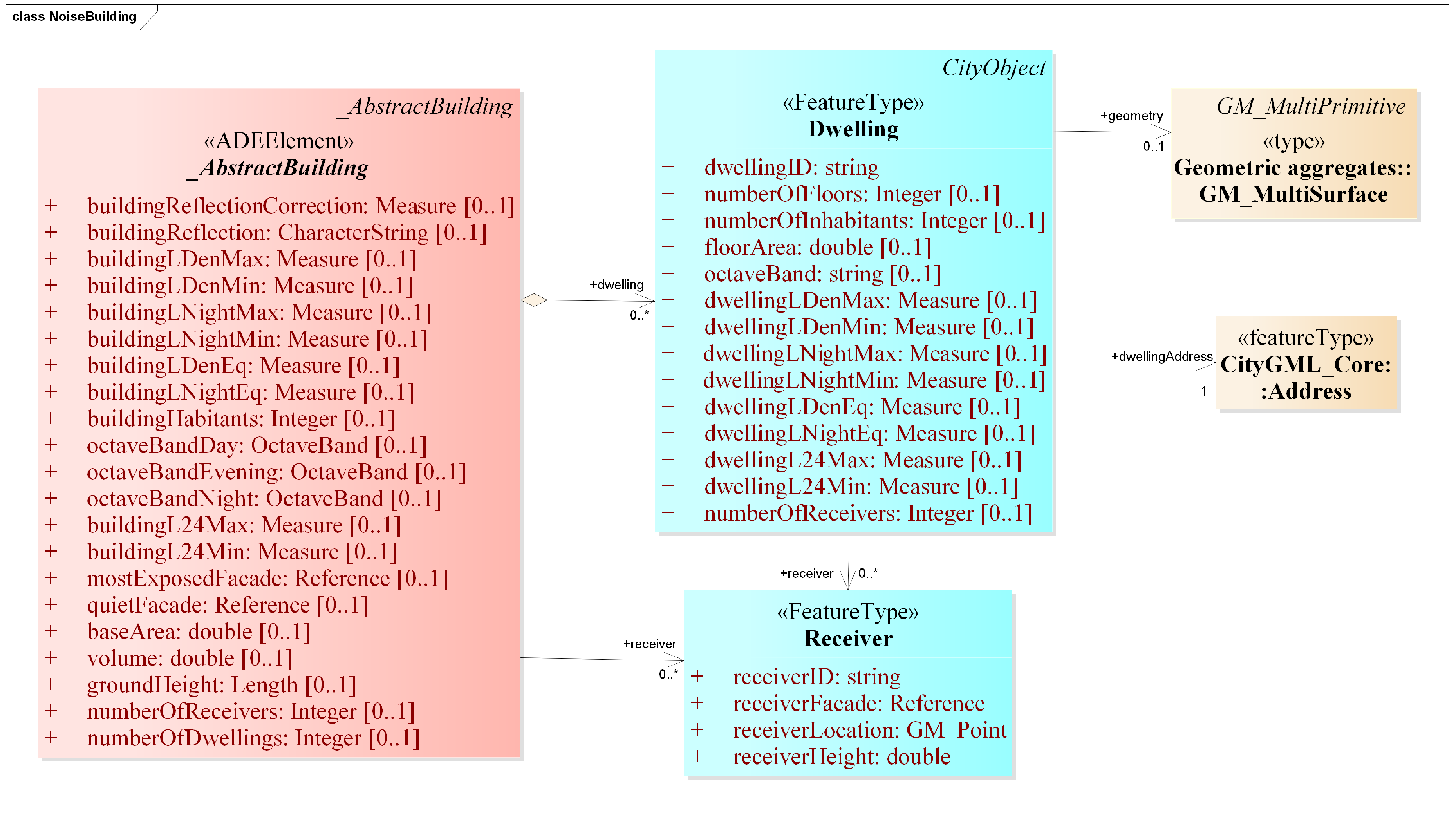
However, the term Building is not referenced directly in the context of the exposure assessments required by the Annex VI of the END. Instead, the term dwelling is used, which can be described as a self-contained unit of accommodation [38]. A building may contain zero, one, or more individual dwellings. For instance, a residential building can contain one or more individual dwellings. To comply with the END, CNOSSOS-EU and INSPIRE, a new city object Dwelling is introduced in our eNoise ADE with the following attributes:
- ID of the dwelling (gml:id),
- address of the dwelling (core:address),
- number of floors in the dwelling (enoise:numberOfFloors),
- number of inhabitants in the dwelling (enoise:numberOfInhabitants),
- floor area of the dwelling (enoise:floorArea),
- noise levels for each individual dwelling (enoise:LDenMax, enoise:LDenMin, enoise:LNightMax, enoise:LNightMin, enoise:LDenEq, enoise:LNightEq, enoise:L24Max, enoise:L24Min),
- octave band for each time period (day, evening, and night) (enoise:octaveBandDay, enoise:octaveBandEvening, enoise:octaveBandNight),
- number of receivers placed on the building (enoise:numberOfReceivers), and
- information about the receivers placed on the dwelling (enoise:receiver).
Our eNoise ADE includes all the aforementioned attributes for buildings from the Noise ADE. Apart from that, the following attributes are added to the _AbstractBuilding class in our eNoise ADE in accordance with the INSPIRE and the CNOSSOS-EU:
- octave band for each time period (day, evening, and night) (enoise:octaveBandDay, enoise:octaveBandEvening, enoise:octaveBandNight),
- calculated noise levels for the whole building for 24 h (enoise:buildingL24Max, enoise:buildingL24Min),
- most exposed façade (enoise:mostExposedFacade),
- quiet façade (enoise:quietFacade),
- base area of the building (enoise:baseArea),
- volume of the building (enoise:volume),
- absolute ground height of the building (enoise:groundHeight),
- number of receivers placed on the building (enoise:numberOfReceivers),
- information about the receivers placed on the building, i.e., ID of the façade on which the receiver is placed (enoise:receiverFacade), location of the receiver (enoise:receiverLocation), and height above the ground (enoise:receiverHeight),
- number of dwellings in the building (enoise:numberOfDwellings), and
- information about the dwellings (dwelling).
Relief (Terrain)
GIS practitioners often model terrain (relief) as TINs (Triangulated Irregular Networks) or grids. Additionally, CityGML allows to model a terrain as a regular grid, or a TIN, or as break lines, or as a collection of points [10]. Apart from the aforementioned representations, it is also possible to model a terrain with 3D lines (which can also be contour lines). One advantage can be to store only those 3D lines that significantly contribute to the terrain, thereby reducing the volume of input data required for the simulation and increasing the computation performance of the simulation. Therefore, enoise:LineRelief is added as one more terrain representation type in CityGML representing such 3D lines (Figure 4). This is also in accordance with the Dutch IM Geluid model. The idea is to capture height variations with as few elements (elevation points or lines) as possible.
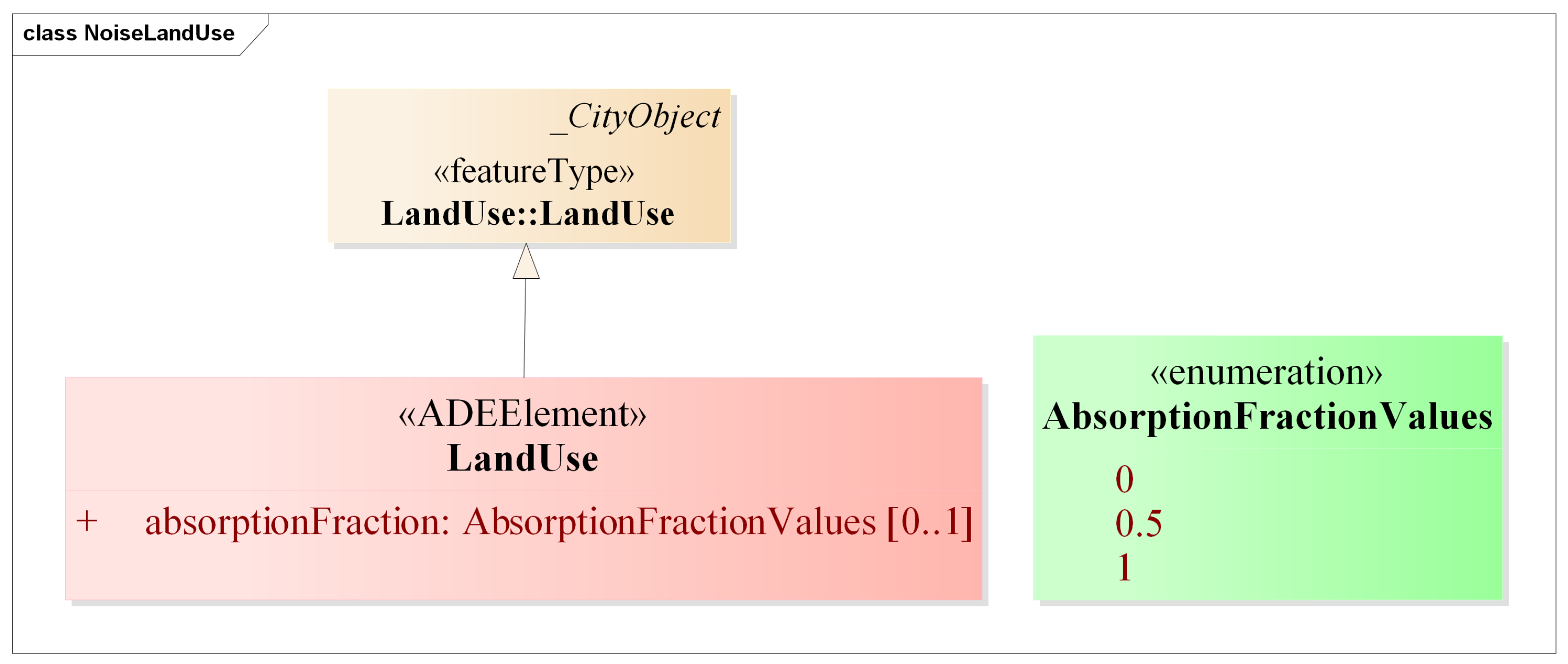
Land Use
The CityGML LandUse class is not only used to describe the specific land use of an area, but also the physical characteristics of the area, e.g., wetlands, grasslands, forests, sand, etc. [10]. The noise reflection or absorption are characteristics properties of a land area. Therefore, the CityGML LandUse class is extended to include an attribute (enoise:absorptionFraction) to model the degree of noise absorption by the land area (Figure 5). This is also in accordance with the Dutch IM Geluid and CNOSSOS-EU. The value of the proposed attribute are defined in an enumeration (enoise:AbsorptionFractionValues) with values 0 (hard), 1 (soft), and 0.5 (middle/medium).
Road
The CityGML Road class originally has only a few attributes to store the ID (gml:id), class (tran:class), function (tran:function), and usage (tran:usage) of the road. The Road class inherits these aforementioned attributes from the CityGML class TransportationComplex. The existing Noise ADE added a new object type noise:NoiseRoadSegment to represent the individual segments of a road with special attributes for noise calculation, such as:
- average hourly traffic flow for the day, evening, and at night on the road segment (noise:mDay, noise:mEvening, noise:mNight),
- average hourly traffic flow for 16 h of the day on the road segment, i.e., day and evening summarized (noise:mDay16),
- heavy vehicle percentage in% for the day, evening, and at night on the road segment (noise:pDay, noise:pEvening, noise:pNight),
- heavy vehicle percentage in% for 16 h of the day on the road segment, i.e., day and evening summarised (noise:pDay16),
- average daily traffic flow on the road segment (noise:dtv),
- speed limit in km/h for the passenger cars for the day, evening, and at night on the road segment (noise:speedDayPkw, speedEveningPkw, speedNightPkw),
- speed limit in km/h for the heavy vehicles for the day, evening, and at night on the road segment (noise:speedDayLkw, speedEveningLkw, speedNightLkw),
- material of the surface of the road segment (noise:roadSurfaceMaterial),
- correction of noise emission of the according road segment surface material in dB (noise:roadSurfaceCorrection),
- width of a cross-section of the road segment in meters (noise:distanceCarriageway),
- width of the road segment in meters (noise:distanceD),
- attribute to indicate if the road segment is a bridge (noise:bridge) or a tunnel (noise:tunnel),
- slope correction for the road segment (noise:roadGradientPercent),
- lineage of the data (noise:lineage), and
- geometry of the road segment (noise:lodOBaseLine).
To comply with the CNOSSOS-EU, the road segments are updated (Figure 6) with the following attributes:
- height of the source (enoise:sourceHeight);
- removed the noise:distanceCarriageway attribute and renamed the noise:distanceD as enoise:roadWidth to reflect the width of the road segment in meters;
- age of the road surface (enoise:ageOfRoad),
- attribute to identify if the road segment is a crossing (enoise:crossing) or a roundabout (enoise:roundabout);
- speed of the vehicles during the day, in the evening and at night. We divided the vehicles into five categories as proposed by the CNOSSOS-EU: light motor vehicles, medium heavy motor vehicles, heavy vehicles, powered two wheelers (motorcycles and moped), and electric motor vehicles [8] and report on their speeds during the day (enoise:speedDay), in the evening (enoise:speedEvening), and at night (enoise:speedNight) CNOSSOS includes an open class for the new vehicles to be developed in the future; this class could cover electric or hybrid vehicles or any other futuristic vehicle [8]; we included only the prevalent electric motor vehicles category in our model; we did not include the speed related attributes of the current Noise ADE;
- average yearly traffic flow per vehicle category per time period, i.e., for the day, evening, and at night for the road segment (enoise:mDay, enoise:mEvening, enoise:mNight); the traffic flow attributes of the current Noise ADE did not take vehicle category into account;
- octave band for each time period (day, evening, and night) in which the emissions are recorded (enoise:octaveBandDay, enoise:octaveBandEvening, enoise:octaveBandNight); and
- noise emission from the road segment during the day (enoise:emissionDay), in the evening (enoise:emissionEvening), and at night (enoise:emissionNight).
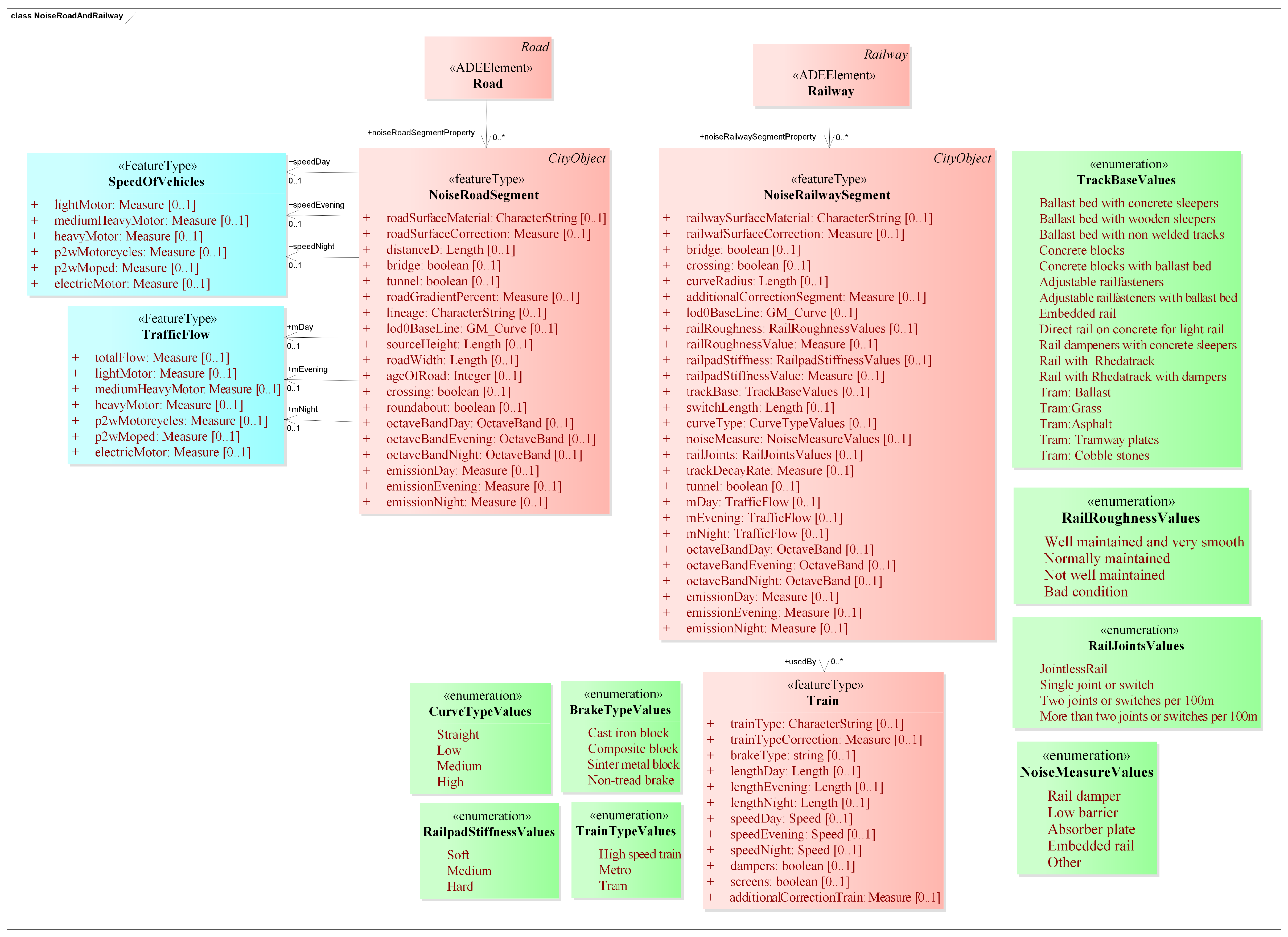
Railway
Railway represents routes that are utilized by rail vehicles, such as trams or trains. The CityGML Railway class inherits the same attributes as the CityGML Road from the CityGML TransportationComplex. The existing Noise ADE added a new object type noise:NoiseRailwaySegment to represent the individual segments of a railway track with special attributes for noise calculation, such as:
- type of the surface material of the segment of the rail track (noise:railwaySurfaceMaterial) and its correction in dB (noise:railwaySurfaceCorrection),
- attribute to indicate if the rail segment is a bridge (noise:bridge) or a crossing (noise:tunnel),
- curve radius of the rail segment in meters (noise:curveRadius),
- additional correction of noise emission if required (noise:additionalCorrectionSegment), and
- geometry of the rail segment (noise:lodOBaseLine).
Generally, the most relevant elements influencing the railway noise emission are railhead roughness, rail pad stiffness, track base, rail joints, and the radius of curvature of the rail track [8]. The railhead roughness and the track decay rate are the two acoustically important parameters according to the ISO 3095 [39]. These are not covered in the existing CityGML Noise ADE. To comply with the CNOSSOS-EU and ISO 3095, we updated the railway segments (Figure 6) with the following attributes:
- indicator for the railhead roughness (enoise:railRoughness), such as well maintained and very smooth, normally maintained, and so on, and its value (usually in microns) (enoise:railRoughnessValue); the values of the attribute enoise:railRoughness are defined in an enumeration (enoise:railRoughnessValues);
- indicator for the rail pad stiffness (enoise:railpadStiffness), such as soft, hard, medium and its value (enoise:railpadStiffnessValue); the values of the attribute enoise:railpadStiffness are defined in an enumeration (enoise:railpadStiffnessValues);
- type of the base of the rail segment (track) (enoise:trackBase), e.g., ballast, slab track, etc.; the values of this attribute are defined in an enumeration (enoise:trackBaseValues);
- type (enoise:curveType) of the curve of a railway segment, i.e., straight, low curve, medium curve, and high curve; the values of this attribute are taken from an enumeration (enoise:CurveTypeValues);
- noise reduction measures in the rail track (enoise:noiseMeasure), such as dampers, barriers, and so on; the values of this attribute are defined in an enumeration (enoise:noiseMeasureValues);
- disconnections (switches or joints) on the rail segment (enoise:railJoints);
- length of the switch of a rail segment (enoise:switchLength);
- track decay rate in dB/m (enoise:trackDecayRate); a high decay rate usually indicate low noise and can be obtained for instance by the use of stiff pads between the rail track and the sleepers;
- attribute to identify if the railway segment is in a tunnel (enoise:tunnel);
- octave band for each time period (day, evening, and night) in which the emissions are recorded (enoise:octaveBandDay, enoise:octaveBandEvening, enoise:octaveBandNight);
- average yearly traffic flow over the railway segment during the day, evening, and at night (enoise:mDay, enoise:mEvening, enoise:mNight); and
- noise emission from the railway segment during the day (enoise:emissionDay), in the evening (enoise:emissionEvening), and at night (enoise:emissionNight).
In the CNOSSOS-EU source model for the rail, the directivity of a source is part of the source description. Perpendicular to the source, there is no correction, but if the source is seen at an angle, the emission is lower. This is expressed in the directivity correction. It is a source attribute, but it can only be evaluated during the calculation itself, and it is not included in the ADE.
Train
Train feature type is already present in the existing CityGML Noise ADE with the following attributes:
- type of train (noise:trainType)
- noise emission correction (in dB) as per the type of the train (noise:trainTypeCorrection)
- portion (in %) of wagons with wheel disc brake for the day, evening, and at night (noise:brakePortionDay, noise:brakePortionEvening, noise:brakePortionNight)
- total length of each train for the day, evening, and at night in meters (noise:lengthDay, lengthEvening, lengthNight)
- speed of the train during the day (noise:speedDay), in the evening (noise:speedEvening), and at night (noise:speedNight)
- additional correction of noise emission if required (noise:additionalCorrectionTrain)
The Train feature type is updated with the following attributes in our ADE:
- type of train (enoise:trainType); we introduced an enumeration TrainTypeValues for the different types of trains (such as high speed trains, trams, etc.);
- type of brakes in the train (enoise:brakeType); we introduced an enumeration enoise:BrakeTypeValues for the different types of brakes in a train; and
- attribute to indicate the presence of noise reduction measures, such as (enoise:dampers) and screens (enoise:screens).
4.2. New Classes in the Model
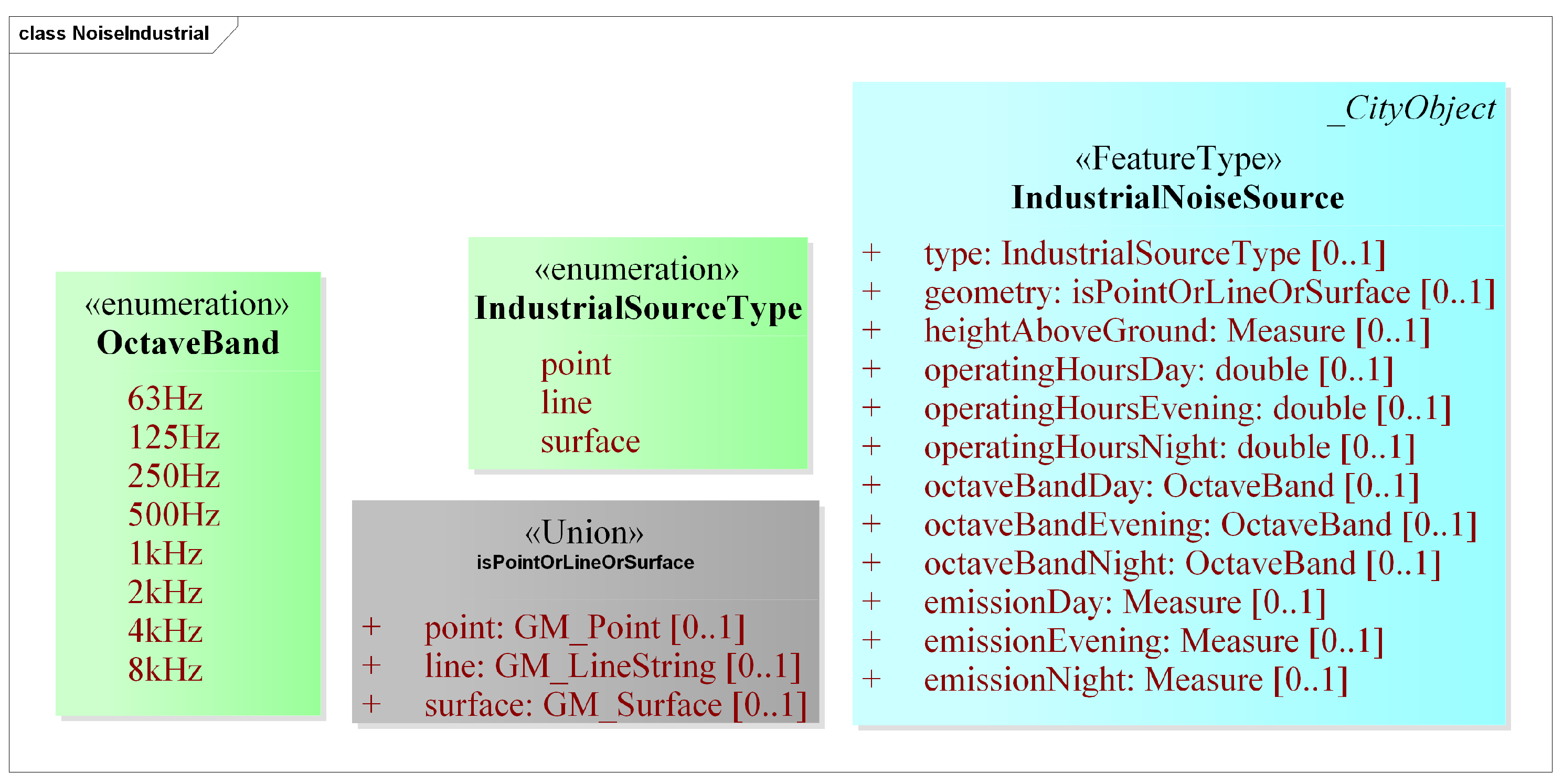
Industry
To model the schema for the industrial noise a concrete class IndustrialNoiseSource is defined to represent the industrial noise sources (Figure 7). Since, at the moment, CNOSSOS-EU is used for strategic noise models, the directivity information of the noise sources is not used; thus, it not described in the ADE. The class IndustrialNoiseSource has the following attributes:
- type of the industrial noise source, i.e., point/line/surface (enoise:type),
- geometry of the noise source (enoise:geometry),
- height of the source from the ground (enoise:heightAboveGround),
- operating hours (day, evening, night on a yearly averaged basis) (enoise:operatingHoursDay, enoise:operatingHoursEvening, enoise:operatingHoursNight),
- emitted noise level by the source (enoise:emissionDay, enoise:emissionEvening, enoise:emissionNight), and
- octave band for each time period (day, evening, and night) in which the emissions are recorded (enoise:octaveBandDay, enoise:octaveBandEvening, enoise:octaveBandNight).
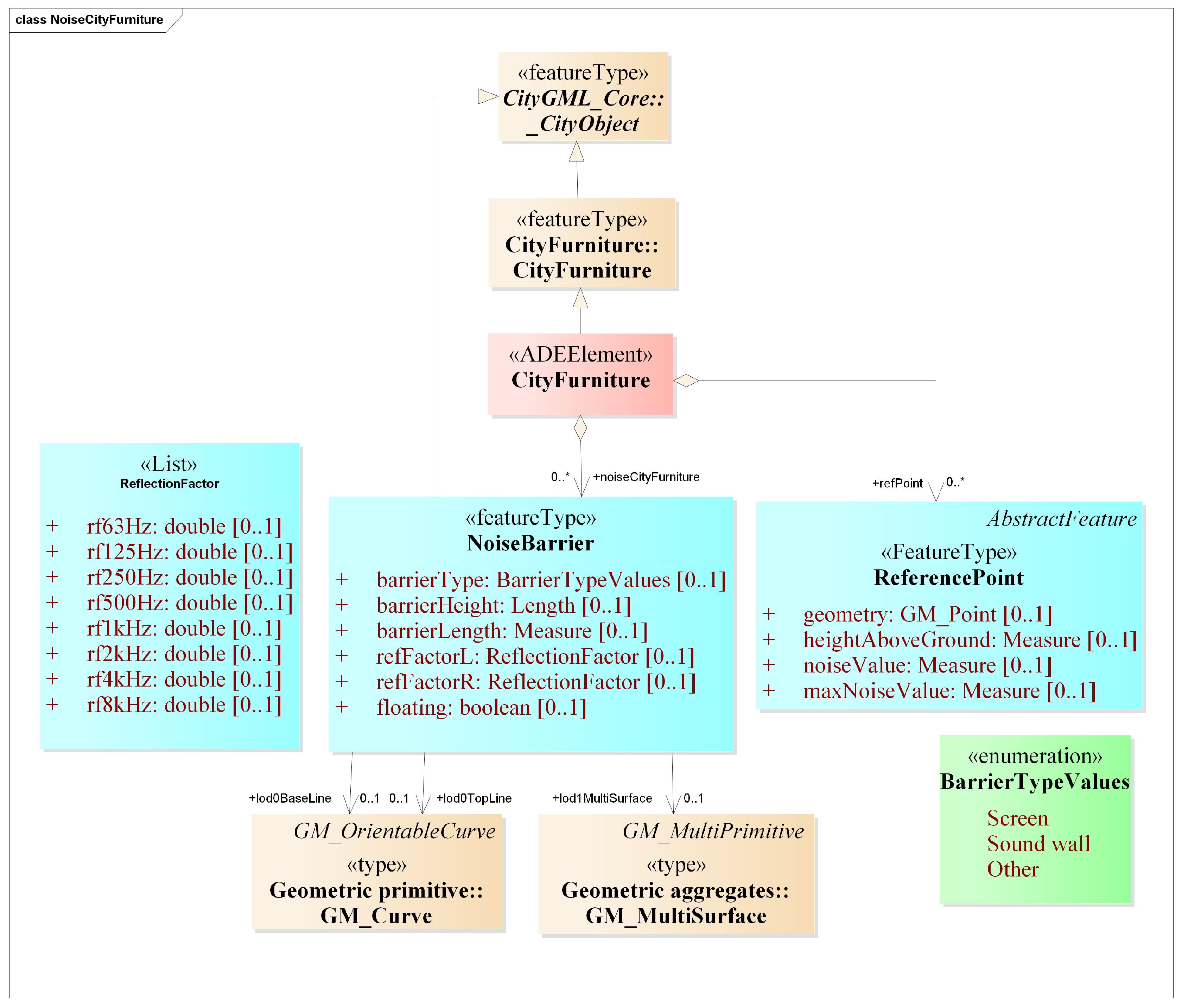
Reference Points
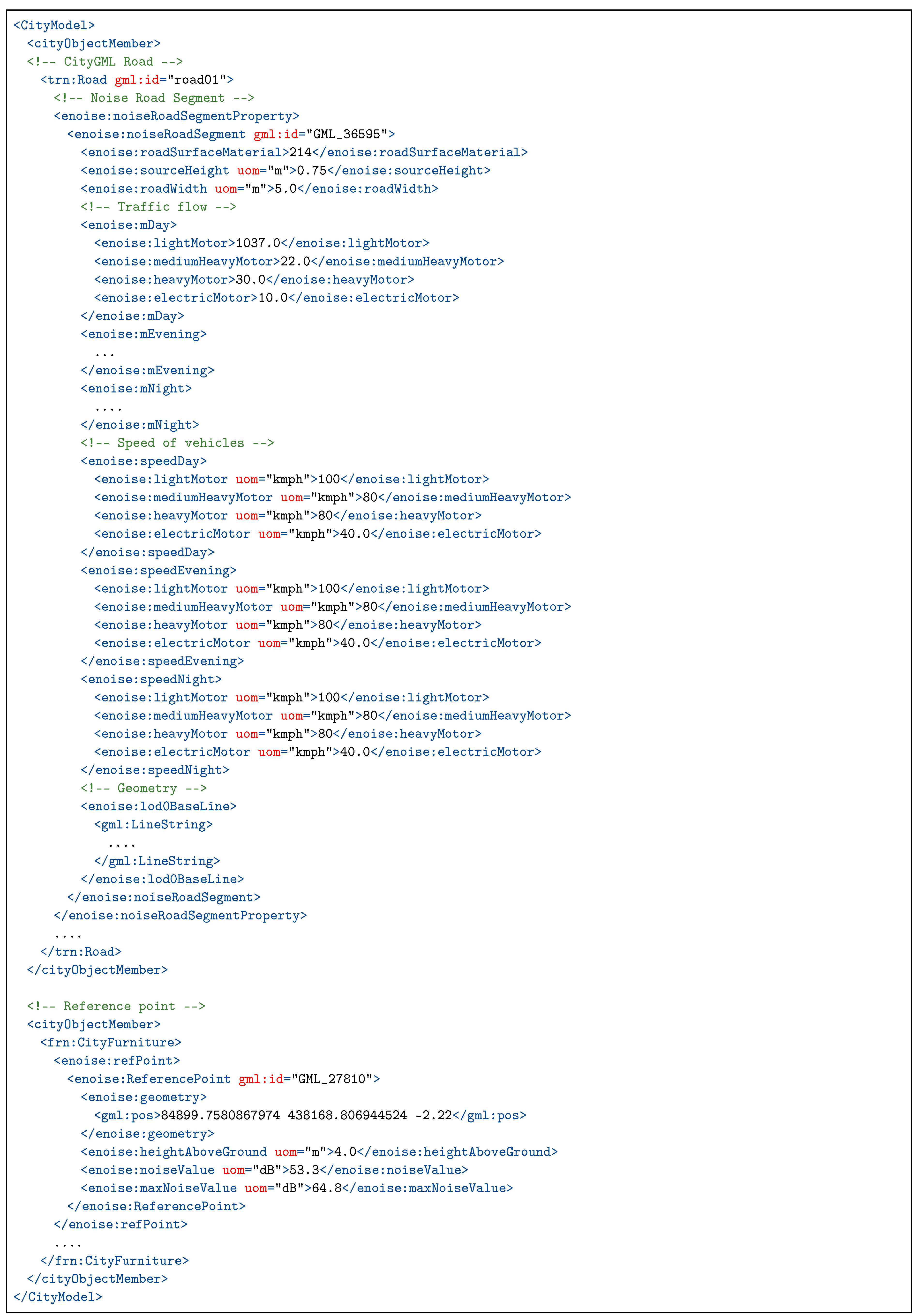
The reference points are legally prescribed points where the maximum levels of noise are determined by a legal decision and are monitored as such. These are modeled based on the geluidregister and IM Geluid. A class (enoise:ReferencePoint) is implemented as a part of the CityGML CityFurniture module to represent such points. We store the geometry of these points ((enoise:geometry), the actual and the maximum noise value at these points (enoise:noiseValue and enoise:maxNoiseValue), and the height of these points above the ground (enoise:heightAboveGround).
Noise Barriers
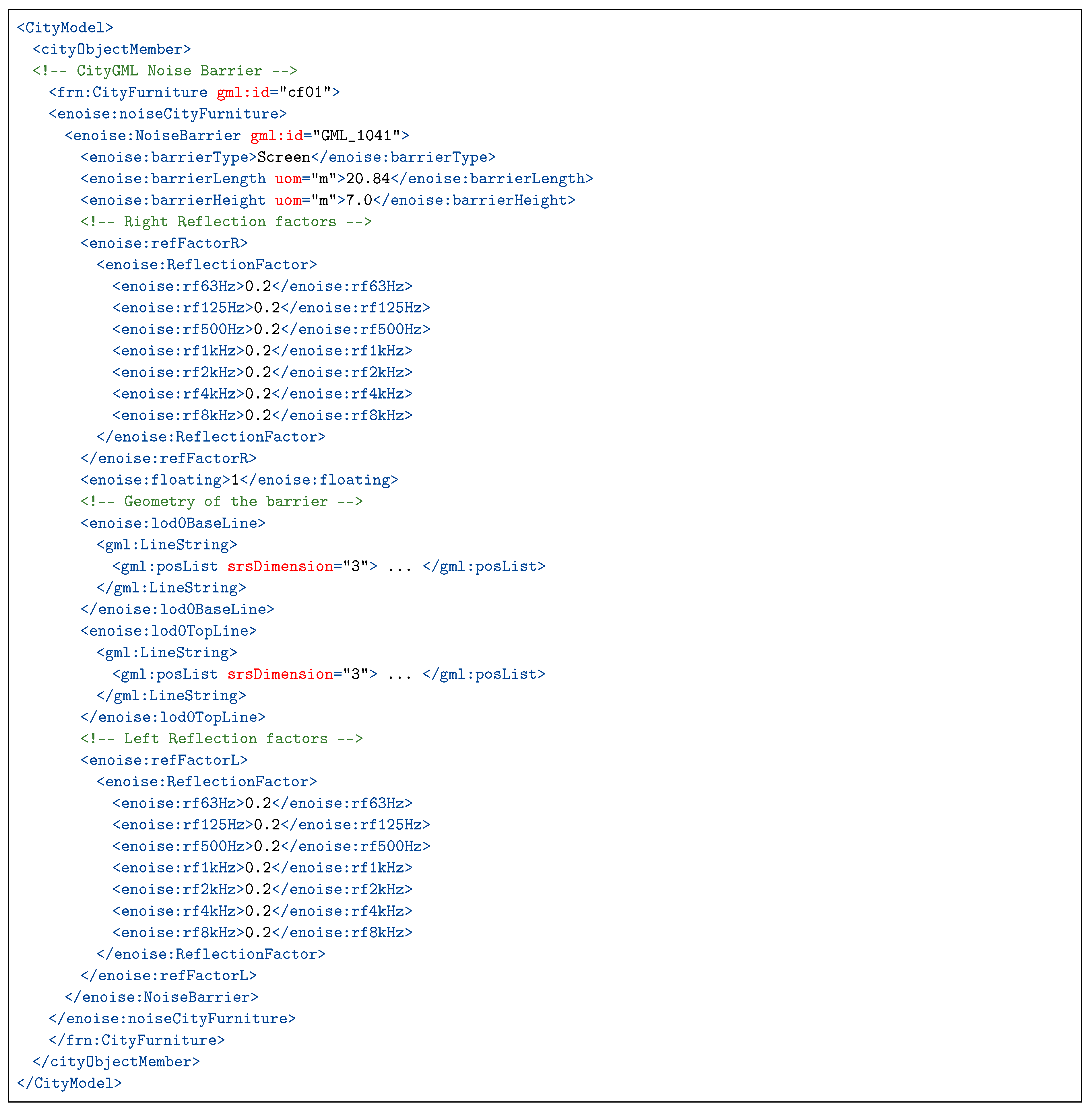
The noise barrier feature is defined in a codelist in the CityFurniture module in the existing CityGML Noise ADE. Further, the geometry of noise barriers is defined as an LOD0 line representation in the existing Noise ADE, whereas there is no LOD0 representation of city furniture features in the CityFurniture module. Further, it is not clear whether this line representation stores the top or bottom of the noise barriers. We define it as a concrete class in CityGML (Figure 8) with the following attributes based on the geluidregister, IM Geluid, and the existing Noise ADE:
- type of the noise barrier (enoise:barrierType); we made an enumeration BarrierTypeValues to store the types of the noise barriers;
- height of the barrier in relation to the ground (enoise:barrierHeight);
- length of the barrier (enoise:barrierLength);
- reflection factor of the barrier on its left and right sides in the octave band (enoise:refFactorL, enoise:refFactorR);
- attribute enoise:floating to check the position of the barrier (value 0 = noise barrier on a slope and 1 = noise barrier on a viaduct); and
- geometry of the barrier as curves/lines (enoise:lod0TopLine representing the top of the noise barriers and enoise:lod0BaseLine representing the base of the noise barriers) and surfaces (enoise:lod1MultiSurface).
5. Datasets Used and Implementation
5.1. Datasets Used
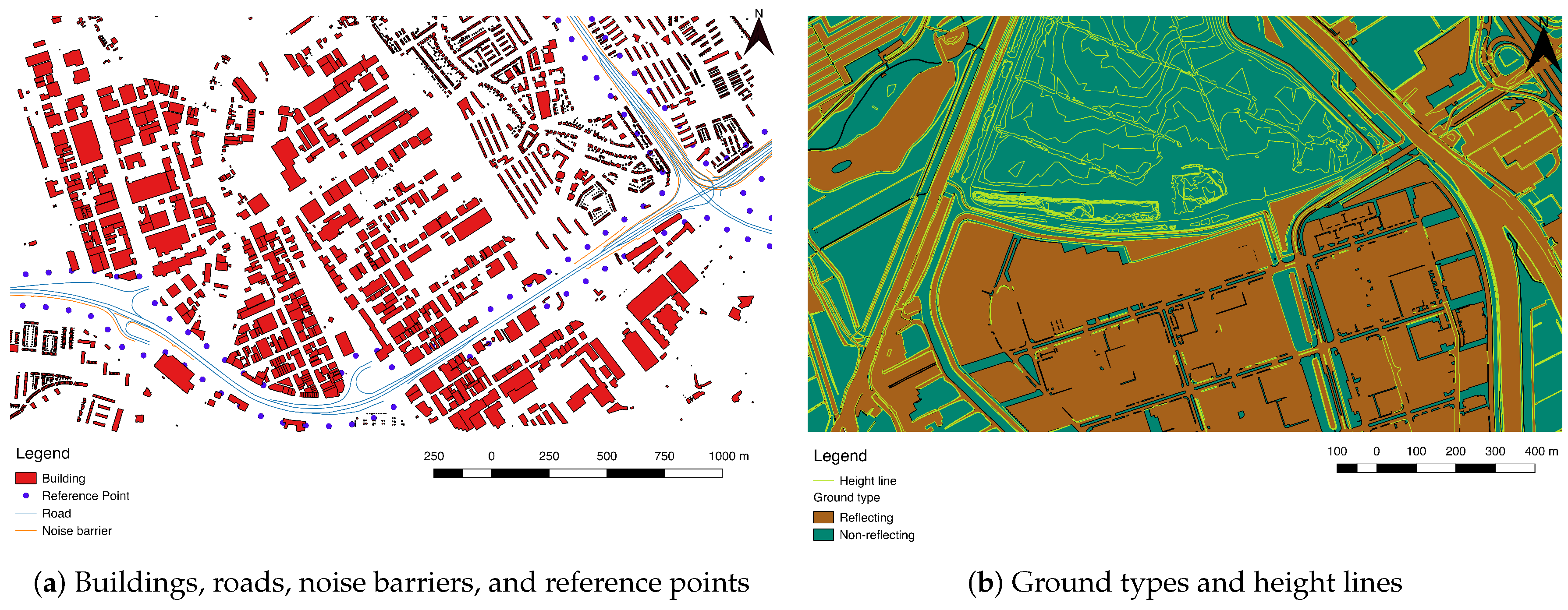
The following input data were used for testing the usability of the ADE:
- Noise sources, i.e., data about the roads and road segments, noise barriers, and the reference points placed alongside the roads in an area in the Netherlands. The reference points are always 50 m away from the road, 4 m high, and 100 m apart [40]. This data was taken from the geluidregister (https://www.rijkswaterstaat.nl/kaarten/geluidregister.aspx), the national noise register of the Netherlands.
- Other built-environment data, i.e., data about the buildings, terrain, and ground types with noise reflection/absorption factors for an area in the Netherlands. This data was created as a part of the ongoing project “Automated reconstruction of 3D input data for noise studies” (https://3d.bk.tudelft.nl/opendata/noise3d/en.html) in collaboration with Rijkswaterstaat, RIVM, Kadaster, and the 3D geoinformation research group, TU Delft.
Figure 9 depicts the input data used in this research.
5.2. Implementation
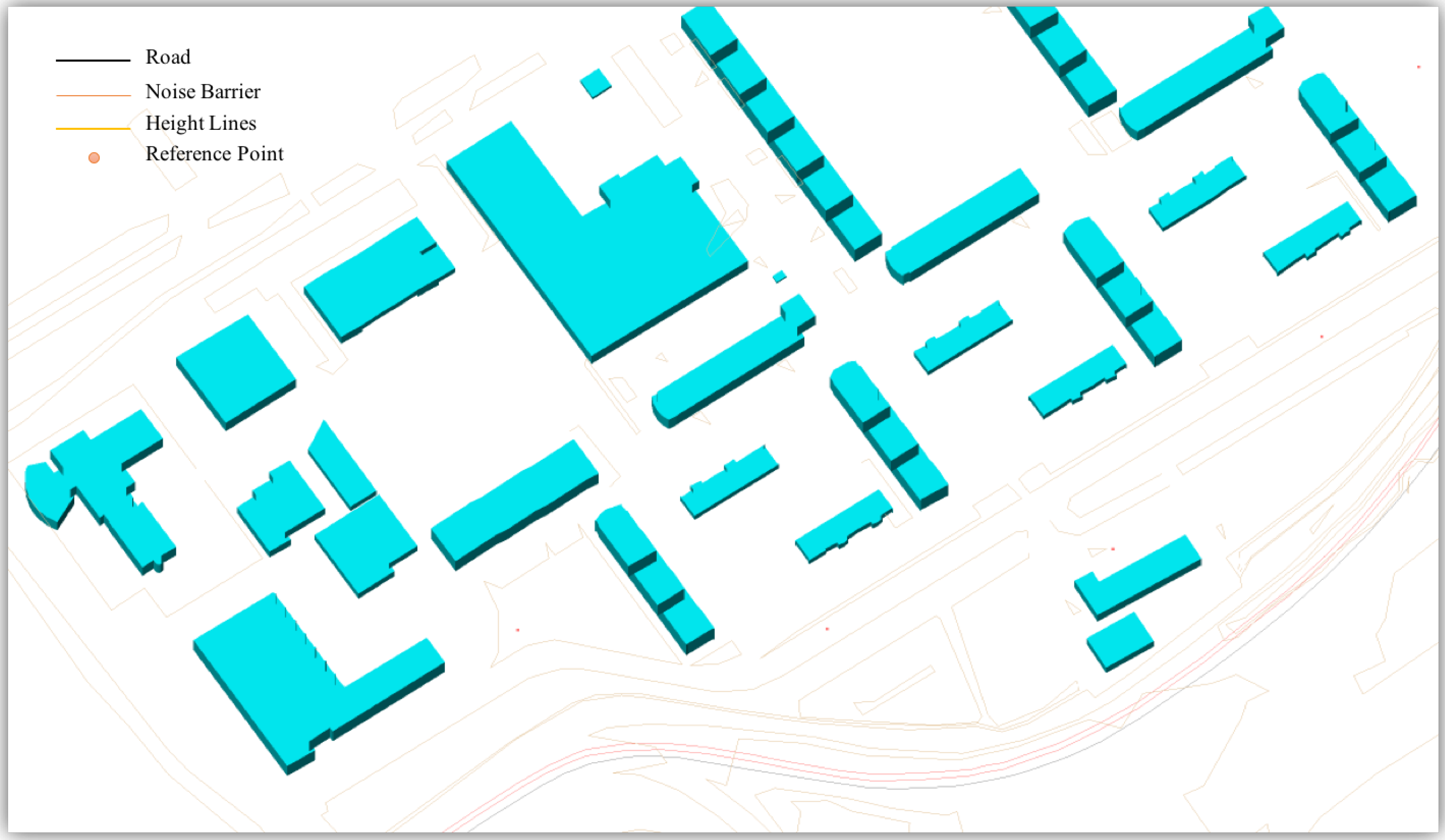
An open source Python prototype was developed that automatically structures the aforementioned input datasets (described in Section 5.1) to comply with our CityGML eNoise ADE format for data storage, 3D noise analysis, and visualization. Figure 10 depicts the generated 3D city model in our CityGML eNoise ADE.
5.2.1. Buildings
The dataset contains 2D footprints for the buildings with height information. These footprints are extruded as solids in 3D using the given height, thus yielding LOD1 building models.
5.2.2. Roads and Reference Points
The dataset contains road segments represented as lines with information about the width of the road, height of the source, traffic flow, etc. The road segments are also modeled as lines in our model. The reference points placed along the length of the roads are also stored with their geometry, height, and the actual and maximum noise value observed at these points. Snippet 1 depicts the generated noise-related input attributes and their values for the road segments in the CityGML eNoise ADE.
Snippet 1.
CityGML Road extended with the input noise attributes in the eNoise ADE.

5.2.3. Noise Barriers
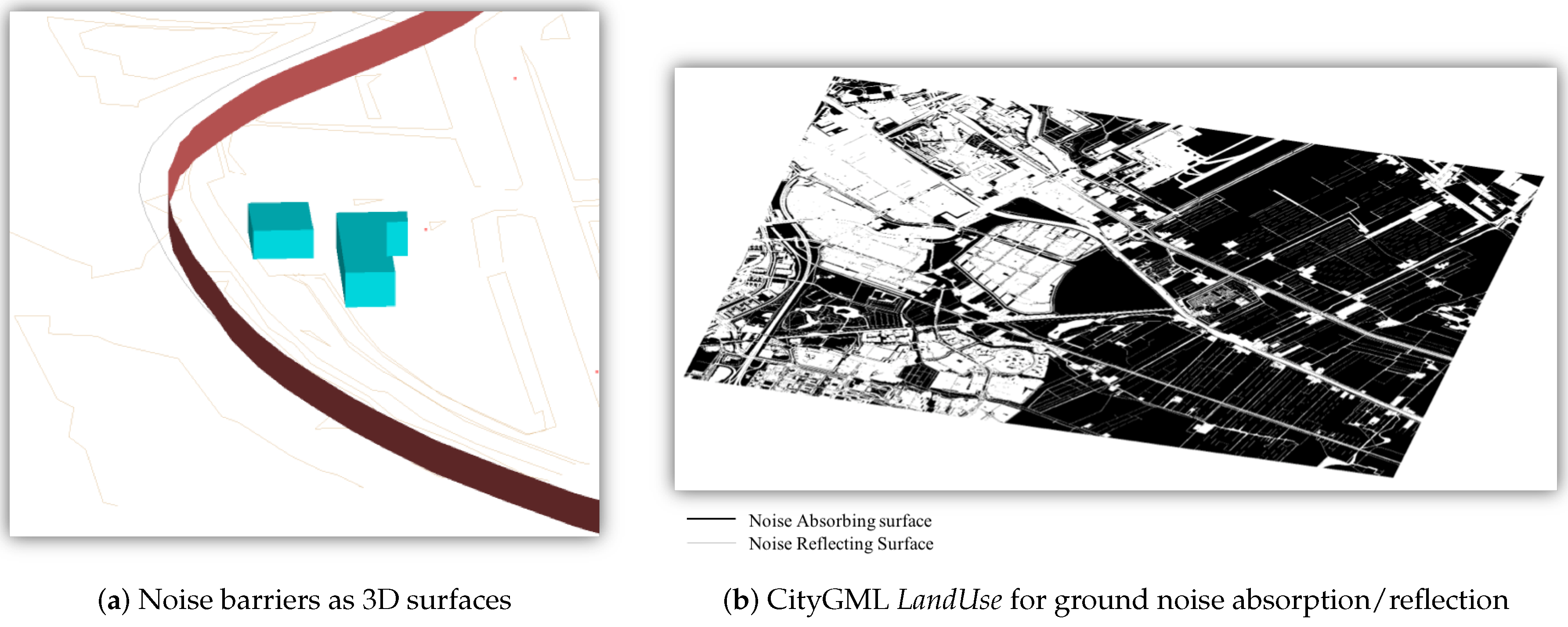
The dataset contains noise barriers represented as lines with information about its type, height, length, reflection factors, etc. The noise barriers can be stored in two ways in our model: as 3D surfaces extruded using the height information (see Figure 11) or as 3D lines representing the top and the bottom of the barriers (see Figure 10). Snippet 2 depicts the noise barriers in the CityGML eNoise ADE.
Snippet 2.
Noise barriers modeled as 3D surfaces in the eNoise ADE.

5.2.4. Terrain
The input data contains terrain as height lines (which are not isolines nor contour lines nor breaklines) [41]. We modeled these as 3D lines, i.e., the CityGML LineRelief.
5.2.5. Ground Type
The noise absorption property of the ground surface is modeled as the characteristic property of the land and is represented using the CityGML LandUse class (see Figure 11).
5.2.6. Simulation Output
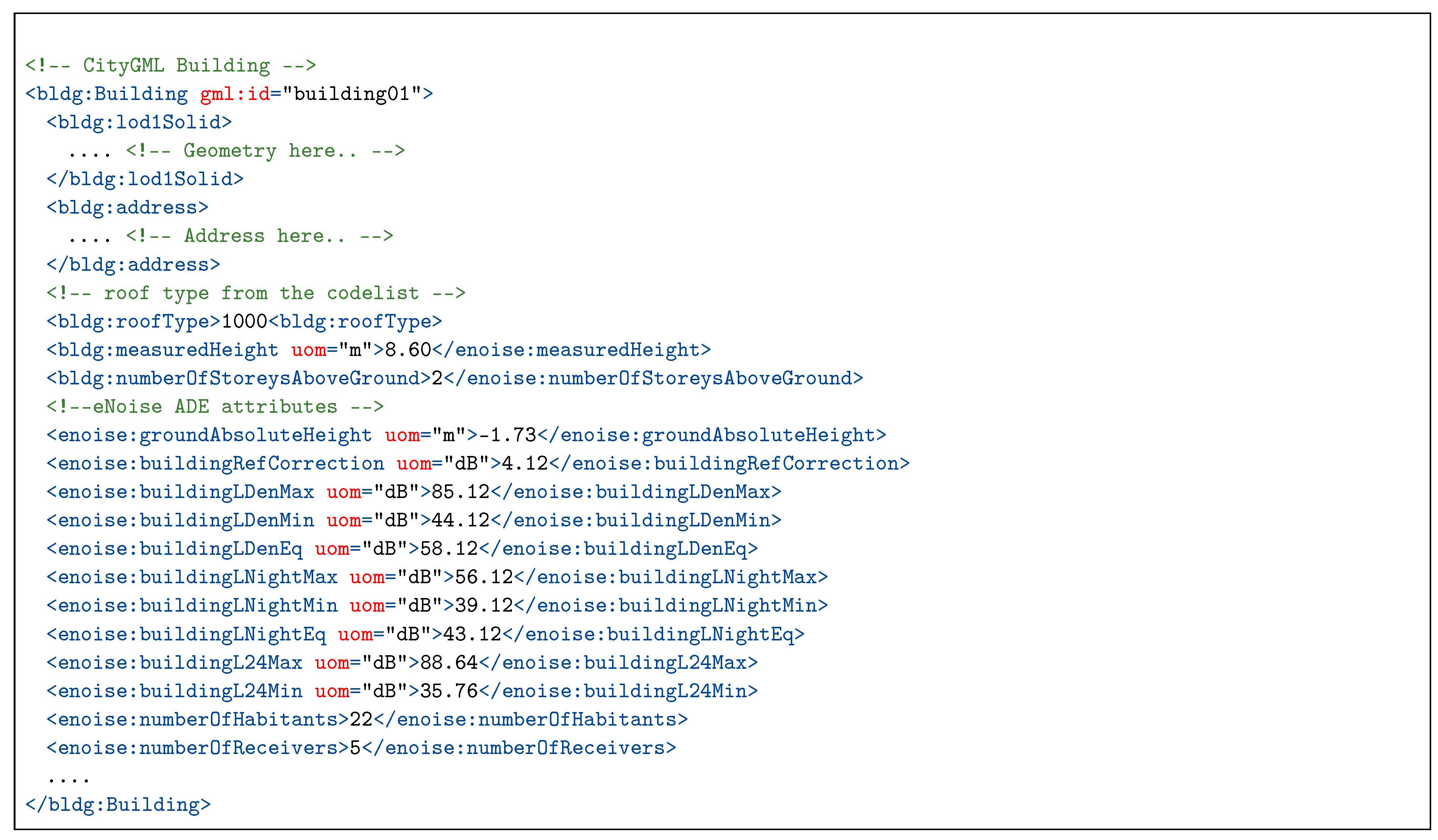
The output noise levels generated by the noise simulations can also be stored in the ADE. The noise levels are calculated based on the emission and location of the noise source and a 3D model of the environment (i.e., buildings, roads, noise barriers) that is used to determine the noise propagation. Geomilieu is a noise simulation software developed by the DGMR (the Hague, the Netherlands) for computing the noise levels, arising from road traffic, rails, industries, and aircraft, in accordance with the noise assessment methods [25]. Geomilieu also implements CNOSSOS-EU for calculating the noise from the roads, industrial areas, and railways. We prepared the data to be run in Geomilieu for calculating the noise levels. Snippet 3 depicts the CityGML ADE Building enriched with the results of the noise simulation.
Snippet 3.
CityGML Building extended with the output noise attributes in the eNoise ADE.

6. Conclusions
The paper presents our research on the implementation of an harmonized input/output data model for urban noise simulations in the EU. Further, we provided an inventory of the noise assessment methods and guidelines followed in the EU MS for the third round of the strategic noise mapping in 2017 (Table 1). We discussed the challenges encountered while preparing this inventory and described how the heterogeneity in the assessment methods and input data used can make it difficult to obtain comparable noise levels across the EU.
Further, we described how the adoption of the CNOSSOS-EU framework can help in increasing the consistency among the results of the noise simulation studies across the EU. Finally, our CityGML-based harmonized data model is presented for modeling the inputs and outputs of noise simulations based on CNOSSOS-EU. We generated a dataset in our ADE format for an area in the Netherlands to model the input/output data for noise simulation. The comparison of our eNoise ADE implementation with the existing CityGML Noise ADE is given in Table 2. Evaluating our data model against the requirements mentioned in Section 2.3, our model:
- stores the input/output data for noise simulation;
- has a UML and an XSD (XML schema);
- is open, extensible, and INSPIRE compliant; further additions can be made to the model by following the rules for extending the CityGML schema;
- is GML-compliant and combines geometry and semantics of noise relevant city objects in one data model;
- has metadata for noise in ADE datasets; and
- can be used for validating the noise of ADE datasets.
EU MS are at a turning point, and the opportunity to set up a common data model for input/output data of noise simulation using CNOSSOS-EU should be seized before the next round of strategic noise mapping. Members states should be ready to implement the next mapping round, testing the new framework. This research is a stepping stone in the direction of standardizing the input data for noise simulations to obtain comparable outcomes of different noise simulations using CNOSSOS across the EU.
Author Contributions
Kavisha Kumar conceived the paper, and carried out the literature review and implementation. Kavisha Kumar wrote the paper in consultation with Richard Schmidt, Theo Verheij, Hugo Ledoux, and Jantien Stoter. All authors read and approved the final manuscript.
Funding
The research leading to this paper is a part of the research project 3D4EM (3D for Environmental Modeling) in the Maps4Society programme (grant No. 13740) which is funded by the NWO (Netherlands Organization for Scientific Research), and partly funded by the Ministry of Economic Affairs. This work is also funded by the European Research Council under the European Union’s Horizon 2020 ERC Agreement no. 677312 UMnD: Urban modeling in higher dimensions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Den Boer, L.; Schroten, A. Traffic noise reduction in Europe. CE Delft 2007, 14, 2057–2068. [Google Scholar]
- Directive, E. Directive 2002/49/EC of the European parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Communities L 2002, 189, 12–26. [Google Scholar]
- de Kluijver, H.; Stoter, J. Noise mapping and GIS: Optimising quality and efficiency of noise effect studies. Comput. Environ. Urban Syst. 2003, 27, 85–102. [Google Scholar] [CrossRef] [Green Version]
- Murphy, E.; King, E.A. Strategic environmental noise mapping: Methodological issues concerning the implementation of the EU Environmental Noise Directive and their policy implications. Environ. Int. 2010, 36, 290–298. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- King, E.A.; Murphy, E.; Rice, H.J. Implementation of the EU environmental noise directive: Lessons from the first phase of strategic noise mapping and action planning in Ireland. J. Environ. Manag. 2011, 92, 756–764. [Google Scholar] [CrossRef] [PubMed]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F.; Van Maercke, D.; Shilton, S.; Jones, N. Advances in the development of common noise assessment methods in Europe: The CNOSSOS-EU framework for strategic environmental noise mapping. Sci. Total Environ. 2014, 482, 400–410. [Google Scholar] [CrossRef]
- Nijland, H.; Van Wee, G. Traffic noise in Europe: A comparison of calculation methods, noise indices and noise standards for road and railroad traffic in Europe. Transp. Rev. 2005, 25, 591–612. [Google Scholar] [CrossRef]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); Publications Office of the European Union: Brussels, Belgium, 2012. [Google Scholar]
- Directive, E. Commission Directive (EU) 2015/996 of 19 May 2015 Establishing Common Noise Assessment Methods According to Directive 2002/49/EC of the European Parliament and of the Council. Off. J. Eur. Union L 2015, 168, 58. [Google Scholar]
- OGC. OGC® City Geography Markup Language (CityGML) Encoding Standard 2.0.0. Doc. No. 12–019; OGC: Wayland, MA, USA, 2012. [Google Scholar]
- Czerwinski, A.; Sandmann, S.; Stöcker-Meier, E.; Plümer, L. Sustainable SDI for EU noise mapping in NRW-best practice for INSPIRE. IJSDIR 2007, 2, 90–111. [Google Scholar]
- Dutilleux, G.; Defrance, J.; Ecotière, D.; Gauvreau, B.; Bérengier, M.; Besnard, F.; Duc, E.L. NMPB-ROUTES-2008: The revision of the French method for road traffic noise prediction. Acta Acust. United Acust. 2010, 96, 452–462. [Google Scholar] [CrossRef]
- De minister van Volkshuisvesting, Ruimtelijke Ordening en Milieubeheer. Reken-en Meetvoorschrift Railverkeerslawaai (RMR); De minister van Volkshuisvesting: Ruimtelijke Ordening en Milieubeheer, The Netherlands, 2012. [Google Scholar]
- ECAC. ECAC.CEAC Doc 29—2nd Edition—Report on Standard Method of Computing Noise Contours around Civil Airports; ECAC: Paris, France, 1997. [Google Scholar]
- ISO. ISO 9613-2:1996—Acoustics—Attenuation of Sound during Propagation Outdoors—Part 2: General Method of Calculation; ISO: Geneva, Switzerland, 1996. [Google Scholar]
- European Environment Agency. Electronic Noise Data Reporting Mechanism: A Handbook for Delivery of Data in Accordance with Directive 2002/49/EC; Technical Report; European Environment Agency: Copenhagen, Denmark, 2012. [Google Scholar]
- Licitra, G. Noise Mapping in the EU: Models and Procedures; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Stoter, J.; Peters, R.; Commandeur, T.; Dukai, B.; Kumar, K.; Ledoux, H. Automated reconstruction of 3D input data for noise simulation. Comput. Environ. Urban Syst. 2020, 80, 101424. [Google Scholar] [CrossRef]
- Vergoed, T.; van Leeuwen, H.J. Evaluation and validation of the CNOSSOS calculation method in the Netherlands. In Proceedings of the EuroNoise 2018, Heraklion, Greece, 27–31 May 2018. [Google Scholar]
- Kokkonen, J.; Kontkanen, O.; Maijala, P.P. CNOSSOS-EU Noise Model Implementation in Finland. In Proceedings of the Baltic-Nordic Acoustic Meeting, Stockholm, Sweden, 20–22 June 2016; pp. 19–22. [Google Scholar]
- Kokkonen, J. CNOSSOS-EU noise model implementation in Finland and experience of it in 3rd END round. In Proceedings of the Euronoise 2018, Hersonissos, Greece, 27–31 May 2018; pp. 27–31. [Google Scholar]
- Wszołek, T.; Stępień, B.; Mleczko, D. Comparison of ISO 9613-2 and CNOSSOS-EU methods in noise modelling of a large industrial plant. INTER-NOISE NOISE-CON Congr. Conf. Proc. 2019, 259, 7807–7810. [Google Scholar]
- Bertellino, F.; Gerola, F.; Clementel, M.; Scaramuzza, P.; Nardelli, M. Noise Mapping of Agglomerations: A comparison of interim standards vs. new CNOSSOS method in a real case study. INTER-NOISE NOISE-CON Congr. Conf. Proc. 2016, 253, 3639–3649. [Google Scholar]
- Heutschi, K.; Locher, B.; Gerber, M. sonROAD18: Swiss Implementation of the CNOSSOS-EU Road Traffic Noise Emission Model. Acta Acust. United Acust. 2018, 104, 697–706. [Google Scholar] [CrossRef]
- DGMR. Geomilieu—Berekenen en Analyseren van Milieubelasting; DGMR: Den Haag, The Netherlands, 2018. [Google Scholar]
- Geomod. MithraSIG: Acoustic Simulation Software; Geomod: Brest, France, 2018. [Google Scholar]
- Wölfel Group. IMMI: Precise and Efficient Software for Noise Prediction and Dispersion of Air Pollutants; Wölfel Group: Kentwood, MI, USA, 2018. [Google Scholar]
- Brüel and Kjaer. Predictor-LimA Software; Brüel and Kjaer: Nærum, Denmark, 2018. [Google Scholar]
- DataKustik GmbH. CadnaA; DataKustik GmbH: Gilching, Germany, 2017. [Google Scholar]
- Benocci, R.; Bellucci, P.; Peruzzi, L.; Bisceglie, A.; Angelini, F.; Confalonieri, C.; Zambon, G. Dynamic noise mapping in the suburban area of Rome (Italy). Environments 2019, 6, 79. [Google Scholar] [CrossRef] [Green Version]
- Shilton, S.J.; Anfosso Lédée, F.; Van Leeuwen, H. Conversion of existing road source data to use CNOSSOS-EU. In Proceedings of the EuroNoise 2015, Maastricht, The Netherlands, 31 May–3 June 2015. [Google Scholar]
- Maijala, P.; Kontkanen, O. CNOSSOS-EU Sensitivity to Meteorological and to Some Road Initial Value Changes. INTER-NOISE NOISE-CON Congr. Conf. Proc. 2016, 253, 6245–6256. [Google Scholar]
- Biljecki, F.; Kumar, K.; Nagel, C. CityGML Application Domain Extension (ADE): Overview of developments. Open Geospat. Data Softw. Stand. 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Czerwinski, A.; Kolbe, T.H.; Plümer, L.; Stöcker-Meier, E. Interoperability and accuracy requirements for EU environmental noise mapping. In Proceedings of the International Symposium InterCarto–InterGIS 12, Berlin, Germany, 28–30 August 2006. [Google Scholar]
- Czerwinski, A.; Kolbe, T.H.; Plümer, L.; Stöcker-Meier, E. Spatial data infrastructure techniques for flexible noise mapping strategies. In Proceedings of the 20th International Conference on Environmental Informatics-Managing Environmental Knowledge, Graz, Austria, 6–8 September 2006; pp. 99–106. [Google Scholar]
- Kumar, K.; Ledoux, H.; Commandeur, T.; Stoter, J. Modelling urban noise in CityGML ADE: Case of the Netherlands. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-4/W5, 73–81. [Google Scholar] [CrossRef] [Green Version]
- Labetski, A.; Kumar, K.; Ledoux, H.; Stoter, J. A metadata ADE for CityGML. Open Geospat. Data Softw. Stand. 2018, 3, 16. [Google Scholar] [CrossRef] [Green Version]
- INSPIRE TWG Buildings. D2.8.III.2 INSPIRE Data Specification on Buildings—Technical Guidelines; European Commission Joint Research Centre: Ispra, Italy, 2013. [Google Scholar]
- ISO. ISO 3095:2013—Acoustics—Railway Applications—Measurement of Noise Emitted by Railbound Vehicles; ISO: Geneva, Switzerland, 2013. [Google Scholar]
- Rijkswaterstraat, Ministerie van Infrastructuur en Milieu. Gebruikershandleiding Geluidregister Hoofdwegennet; Rijkswaterstraat, Ministerie van Infrastructuur en Milieu: Den Haag, The Netherlands, 2014. [Google Scholar]
- TU Delft. 3D Input Data for Noise Studies (Experimental). 2019. Available online: https://3d.bk.tudelft.nl/opendata/noise3d/en.html (accessed on 22 December 2019).
- Forschungsgesellschaft Strasse—Schiene-Verkehr. 04.02.11 Larmschutz; Forschungsgesellschaft Strasse—Schiene-Verkehr: Wein, Austria, 2006. [Google Scholar]
- Austrian Standards. ONR 305011: 2009—Determination of Noise Immission Caused by Rail Traffic—Railway Traffic, Shunting and Cargo Handling Operations; Austrian Standards: Vienna, Austria, 2009. [Google Scholar]
- Austrian Standards. ONORM ISO 9613-2: 2008—Acoustics—Attenuation of Sound during Propagation Outdoors—Part 2: General Method of Calculation; Austrian Standards: Vienna, Austria, 2008. [Google Scholar]
- Austrian Standards. OAL Richtlinie Nr. 24 Blatt 1: 2008—Noise Protection Zones in the Vicinity of Airports—Planning and Calculation Bases; Austrian Standards: Vienna, Austria, 2008. [Google Scholar]
- De minister van Volkshuisvesting, Ruimtelijke Ordening en Milieubeheer. Reken-en Meetvoorschrift Verkeerslawaai (RMV); De minister van Volkshuisvesting: Ruimtelijke Ordening en Milieubeheer, The Netherlands, 2002. [Google Scholar]
- Boeker, E.R.; Dinges, E.; He, B.; Fleming, G.; Roof, C.J.; Gerbi, P.J.; Rapoza, A.S.; Hermann, J. Integrated Noise Model (INM) Version 7.0 Technical Manual; Technical Report; United States, Federal Aviation Administration, Office of Environment and Energy: Washington, DC, USA, 2008. [Google Scholar]
- CERTU; CSTB; LCPC; SETRA. Bruit des Infrastructures Routières: Méthode de Calcul Incluant les Effets Météorologiques, Version Expérimentale NMPB-Routes-96; CERTU: Brno, Czech Republic, 1997. [Google Scholar]
- ECAC. ECAC.CEAC Doc 29—3rd Edition—Report on Standard Method of Computing Noise Contours around Civil Airports; ECAC: Paris, France, 2016. [Google Scholar]
- Jonasson, H.G.; Storeheier, S. Nord 2000. New Nordic Prediction Method for Road Traffic Noise; The Danish Environmental Protection Agency: Odense, Denmark, 2001. [Google Scholar]
- Danish Environmental Protection Agency. EPA Guideline No. 5/1993—Calculation of External Noise from Enterprises; Danish Environmental Protection Agency: Odense, Denmark, 1993. [Google Scholar]
- Plovsing, B.; Svane, C. DANSIM- Danish Airport Noise Simulation Model: Basic principles, experience, and improvements. Inter-noise 1990, 90, 425–428. [Google Scholar]
- Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit. VBUS—Vorläufige Berechnungsmethode für den Umgebungslärm an Straßen; Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit: Bonn, Germany, 2006. [Google Scholar]
- Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit. VBUSch—Vorläufige Berechnungsmethode für den Umgebungslärm an Schienenwegen; Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit: Bonn, Germany, 2006. [Google Scholar]
- Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit. VBUI—Vorläufige Berechnungsmethode für den Umgebungslärm durch Industrie und Gewerbe; Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit: Bonn, Germany, 2006. [Google Scholar]
- Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit. VBUF—Vorläufige Berechnungsmethode für den Umgebungslärm an Flugplätzen; Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit: Bonn, Germany, 2006. [Google Scholar]
- KTI Rt. UT 2.1-302 Road Traffic Noise Calculation; KTI Rt: Budapeste, Hungary, 2000. [Google Scholar]
- MSZT/MCS 302. MSZ-07-2904:1990—Method of Calculation of Traffic Noise. Noise Caused by Railway Traffic. 1990. Available online: https://ugyintezes.mszt.hu/Publications/Details/035647 (accessed on 15 December 2019).
- MSZT/MB 327. MSZ 15036:2002—Outdoor Sound Propagation. 2002. Available online: https://ugyintezes.mszt.hu/Publications/Details/120177 (accessed on 15 December 2019).
- La Ministre de l’Environnement Luxembourg. Courrier d’information de la Commission Concernant la Cartographie Strategique du Bruit des Sites d?activite Industrielle au sein de L’agglomeration de la Ville de Luxembourg et Environs; La Ministre de l’Environnement Luxembourg: Luxembourg, 2018. [Google Scholar]
- Minister van Volkshuisvesting, Ruimtelijke Ordening en Milieubeheer. Handleiding meten en Rekenen Industrielawaai; Minister van Volkshuisvesting, Ruimtelijke Ordening en Milieubeheer: The Hague, The Netherlands, 1991. [Google Scholar]
- SAE International. AIR 1845—Procedure for the Calculation of Airplane noise in the Vicinity of Airports; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Moehler, U.; Kurze, U.J.; Liepert, M.; Onnich, H. The new German prediction model for railway noise “Schall 03 2006”: An alternative method for the harmonised calculation method proposed in the EU directive on environmental noise. Acta Acust. United Acust. 2008, 94, 548–552. [Google Scholar] [CrossRef]
- Nielsen, H.L. Road Traffic Noise: Nordic Prediction Method; The Nordic Council of Ministers: Copenhagen, Denmark, 1997. [Google Scholar]
- Ringheim, M.; Nielsen, H.L. Railway Traffic Noise—The Nordic Prediction Method; Number 524; The Nordic Council of Ministers: Copenhagen, Denmark, 1997. [Google Scholar]
- Kragh, J.; Andersen, B.; Jakobsen, J. Environmental Noise from Industrial Plants. General Prediction Method; Technical Report; Danish Acoustical Laboratory: Kongens Lyngby, Denmark, 1982. [Google Scholar]
- Department of Transport Welsh Office. Calculation of Road Traffic Noise (CRTN); Department of Transport Welsh Office: Cardiff, UK, 1988. [Google Scholar]
- Department of Transport Welsh Office. Calculation of Railway Noise (CRN); Department of Transport Welsh Office: Cardiff, UK, 1995. [Google Scholar]
Figure 1.
The Unified Modeling Language (UML) depicts the CityGML CityModel class extended to store the metadata attributes related to the eNoise ADE (Application Domain Extension).
Figure 1.
The Unified Modeling Language (UML) depicts the CityGML CityModel class extended to store the metadata attributes related to the eNoise ADE (Application Domain Extension).

Figure 2.
Original attributes in the the UML model of the CityGML _AbstractBuilding (shown in yellow) and extended attributes in the Noise ADE (shown in orange) (Source: CityGML 2.0.0 Specifications [10]).
Figure 2.
Original attributes in the the UML model of the CityGML _AbstractBuilding (shown in yellow) and extended attributes in the Noise ADE (shown in orange) (Source: CityGML 2.0.0 Specifications [10]).

Figure 3.
UML model of the _AbstractBuilding (shown in red) extended to include noise-related attributes and receiver information. A new feature type, Dwelling (shown in blue), is introduced to describe the self-contained unit of accommodation within the buildings.
Figure 3.
UML model of the _AbstractBuilding (shown in red) extended to include noise-related attributes and receiver information. A new feature type, Dwelling (shown in blue), is introduced to describe the self-contained unit of accommodation within the buildings.

Figure 4.
UML model for the LineRelief representation added to the CityGML Relief module to represent the terrain as height lines in CityGML.
Figure 4.
UML model for the LineRelief representation added to the CityGML Relief module to represent the terrain as height lines in CityGML.

Figure 5.
UML model depicts the CityGML LandUse class extended to model the noise absorption property of the land area.
Figure 5.
UML model depicts the CityGML LandUse class extended to model the noise absorption property of the land area.

Figure 6.
UML model of the CityGML Road and Railway (shown in red) extended to include noise-related attributes.
Figure 6.
UML model of the CityGML Road and Railway (shown in red) extended to include noise-related attributes.

Figure 7.
UML depicts the different types of industrial noise sources introduced in CityGML.

Figure 8.
UML model for the noise barriers and reference points modeled in CityGML.

Figure 9.
Input data used for testing the ADE.

Figure 10.
Three-dimensional city model of the study area in our CityGML eNoise ADE depicting buildings, roads, noise barriers, and height lines. Roads and noise barriers are modeled as 3D lines; Buildings are modeled as 3D solids; Terrain is modeled as 3D height lines.
Figure 10.
Three-dimensional city model of the study area in our CityGML eNoise ADE depicting buildings, roads, noise barriers, and height lines. Roads and noise barriers are modeled as 3D lines; Buildings are modeled as 3D solids; Terrain is modeled as 3D height lines.

Figure 11.
Noise barriers and ground types in the generated 3D city model.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Noise assessment methods and guidelines followed in the EU member states (MS) for the Round #3 of strategic noise mapping (2017) (Note: “–” means that data is not available.) (Src: http://cdr.eionet.europa.eu/nl/eu/noise/).
Table 1.
Noise assessment methods and guidelines followed in the EU member states (MS) for the Round #3 of strategic noise mapping (2017) (Note: “–” means that data is not available.) (Src: http://cdr.eionet.europa.eu/nl/eu/noise/).
| # | EU MS | Road Noise | Rail Noise | Industrial Noise | Aircraft Noise |
|---|---|---|---|---|---|
| 1 | Austria | RVS 04.02.11 [42] | ONR 305011 [43] | ÖNORM ISO 9613-2 [44] | ÖAL Guideline No 24-1 [45] |
| 2 | Belgium | NMPB-Routes-2008 (Wallonia), RMV [46] (Flanders) | RMR (Wallonia & Flanders) | ISO 9613-2 (Wallonia & Flanders) | Integrated Noise Model (INM) version 7.0b [47] |
| 3 | Bulgaria | NMPB-Routes-96 [48] | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—2nd Edition |
| 4 | Croatia | NMPB-Routes-96 | RMR | ISO9613-2 | ECAC.CEAC Doc 29—3rd Edition [49] |
| 5 | Cyprus | – | – | – | – |
| 6 | Czech Republic | NMPB-Routes-96 | RMR | ISO 9613-2 | – |
| 7 | Denmark | Nord2000 [50] | Nord2000 | DanishEPA 5/1993 [51] | DANSIM [52] |
| 8 | Estonia | NMPB-Routes-96 | RMR | ISO 9613-2 | – |
| 9 | Finland | CNOSSOS-EU | CNOSSOS-EU | CNOSSOS-EU | ECAC.CEAC Doc 29—3rd Edition |
| 10 | France | NMPB-Routes-2008 | NMPB-Routes-2008 | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 11 | Greece | NMPB-Routes-96 | RMR | – | ECAC.CEAC Doc 29—2nd Edition |
| 12 | Germany | VBUS (Vorläufige Berechnungsmethode für den Umgebungslärm an Straßen) [53] | VBUSch (Vorläufige Berechnungsmethode für den Umgebungslärm an Schienenwegen) [54] | VBUI (Vorläufige Berechnungsmethode für den Umgebungslärm durch Industrie und Gewerbe) [55] | VBUF (Vorläufige Berechnungsmethode für den Umgebungslärm an Flugplätzen) [56] |
| 13 | Hungary | UT2.1-302 [57] | MSZ-07-2904:1990 [58] | Hungarian national computation method according to KvVM Decree 25/2004 (XII. 20.) on the Required Form and Content of Strategic Noise Maps Used for the Evaluation and Management of Environmental Noise and MSZ 15036:2002 [59] | Hungarian national computation method according to joint KHVM-KTM Decree 18/1997. (X. 11.) on Detailed Technical Rules of Designation, Management and Termination of Noise-Protective Zones in the Vicinity of Airports |
| 14 | Ireland | UK CRTN 1988 | RMR | – | ECAC.CEAC Doc 29—3rd Edition and Integrated Noise Model (INM) Version 7.0d |
| 15 | Italy | NMPB-Routes-96 | RMR | – | ECAC.CEAC Doc 29—3rd Edition and Integrated Noise Model (INM) Version 7.0d |
| 16 | Latvia | NMPB-Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 17 | Lithuania | NMPB-Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 18 | Luxembourg | NMPB-Routes-96 | RMR | Courrier d’information de la Commission concernant la cartographie stratégique du bruit des sites d’activité’ industrielle au sein de l’agglomération de la Ville de Luxembourg et environs [60] | ECAC.CEAC Doc 29—3rd Edition |
| 19 | Malta | NMPB-Routes-96 | – | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 20 | Netherlands | RMV | RMR | Handleiding meten en rekenen Industrielawaai (HMRI) [61] | ECAC.CEAC Doc 29—3rd Edition |
| 21 | Poland | NMPB-Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 22 | Portugal | NMPB-Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition, Integrated Noise Model (INM) Version 7.0d, and AIR 1845 [62] |
| 23 | Romania | – | – | – | – |
| 24 | Slovakia | NMPB-Routes-96 | Shall03 [63] | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 25 | Slovenia | NMPB-Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—3rd Edition |
| 26 | Spain | NMPB- Routes-96 | RMR | ISO 9613-2 | ECAC.CEAC Doc 29—2nd Edition |
| 27 | Sweden | Nordic Pred. Method for Road Traffic Noise (RTN) [64] | Nordic Pred. Method for Train Noise (NMT) [65] | Environmental Noise from Industrial Plants. General Prediction Method [66] | ECAC.CEAC Doc 29—3rd Edition and Integrated Noise Model (INM) Version 7.0d |
| 28 | UK | CRTN (Calculation of Road Traffic Noise) [67] | CRN (Calculation of Railway Noise) [68] | – | Integrated Noise Model (INM) Version 7.0d |
Table 2.
Comparison of the existing CityGML Noise ADE with our Extended Noise ADE implementation.
| # | Criteria | Existing CityGML Noise ADE | Our Extended Noise ADE Implementation |
|---|---|---|---|
| 1 | Scale | German | EU |
| 2 | Method | VBUS | CNOSSOS |
| 3 | UML & XML Schema | Available | Available |
| 4 | INSPIRE compliant | No | Yes |
| 5 | Metadata for noise | No | Present |
| 6 | Model road noise | Yes (only in German context) | Yes |
| 7 | Model railway noise | Yes (only in German context) | Yes |
| 8 | Model industrial noise | No | Yes |
| 9 | Model Noise barriers | Partially as lines | Yes (3D surfaces and lines) |
| 10 | Model the effect of ground type | No | Yes |
| 11 | Model reference points | No | Yes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kumar, K.; Ledoux, H.; Schmidt, R.; Verheij, T.; Stoter, J. A Harmonized Data Model for Noise Simulation in the EU. ISPRS Int. J. Geo-Inf. 2020, 9, 121. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9020121
AMA Style
Kumar K, Ledoux H, Schmidt R, Verheij T, Stoter J. A Harmonized Data Model for Noise Simulation in the EU. ISPRS International Journal of Geo-Information. 2020; 9(2):121. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9020121
Chicago/Turabian StyleKumar, Kavisha, Hugo Ledoux, Richard Schmidt, Theo Verheij, and Jantien Stoter. 2020. "A Harmonized Data Model for Noise Simulation in the EU" ISPRS International Journal of Geo-Information 9, no. 2: 121. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9020121
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.