How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit


Abstract
:1. Introduction
2. Methods
2.1. Participants
2.2. Experimental Design
2.3. Participant’s Task
2.4. Materials and Equipment
2.5. Procedure
2.6. Dependent Variables
2.7. Data Reduction
3. Results
3.1. Data Quality Assessment
3.2. Forward Gait Velocities
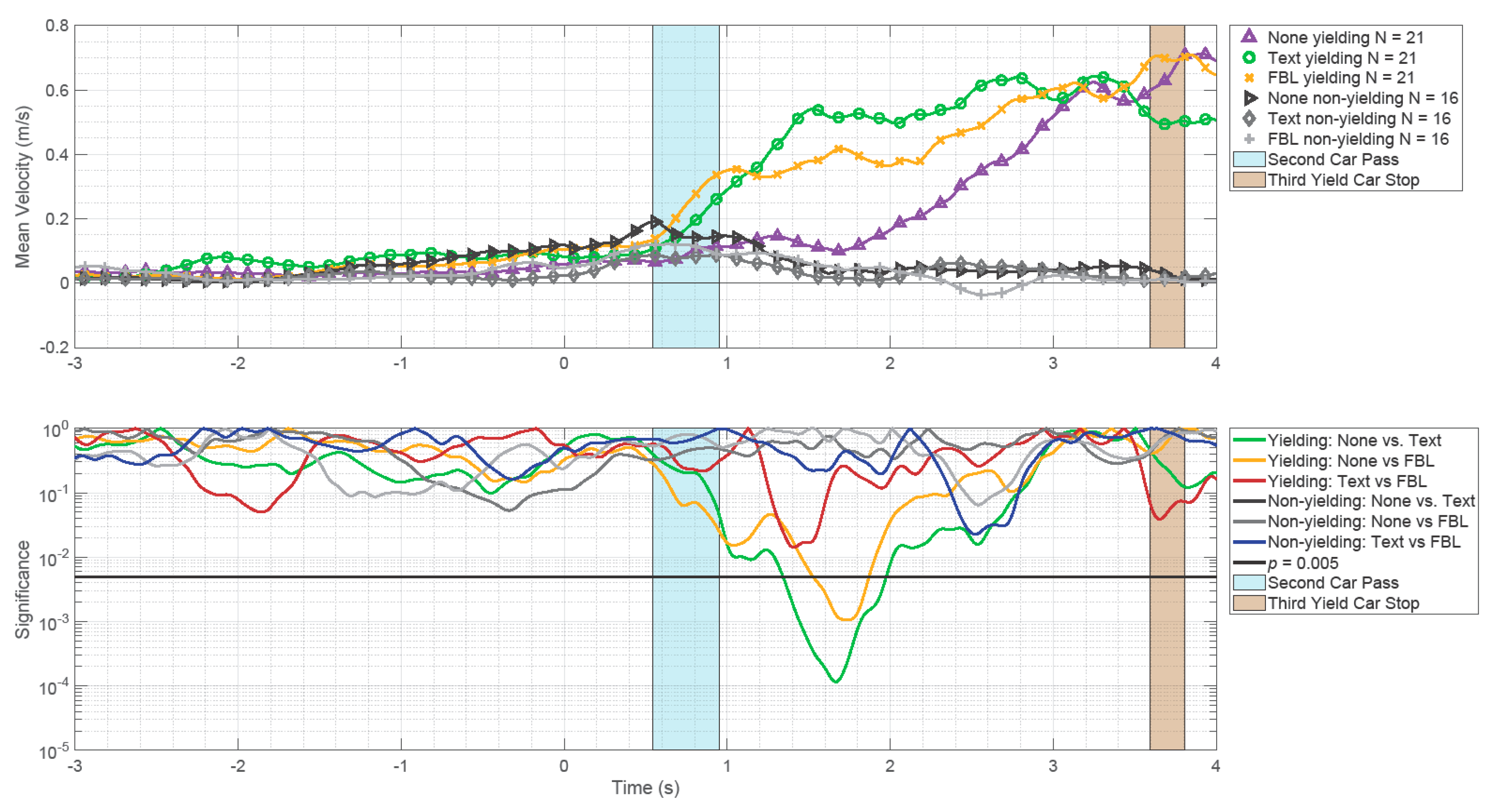
3.2.1. Twenty Meters Condition
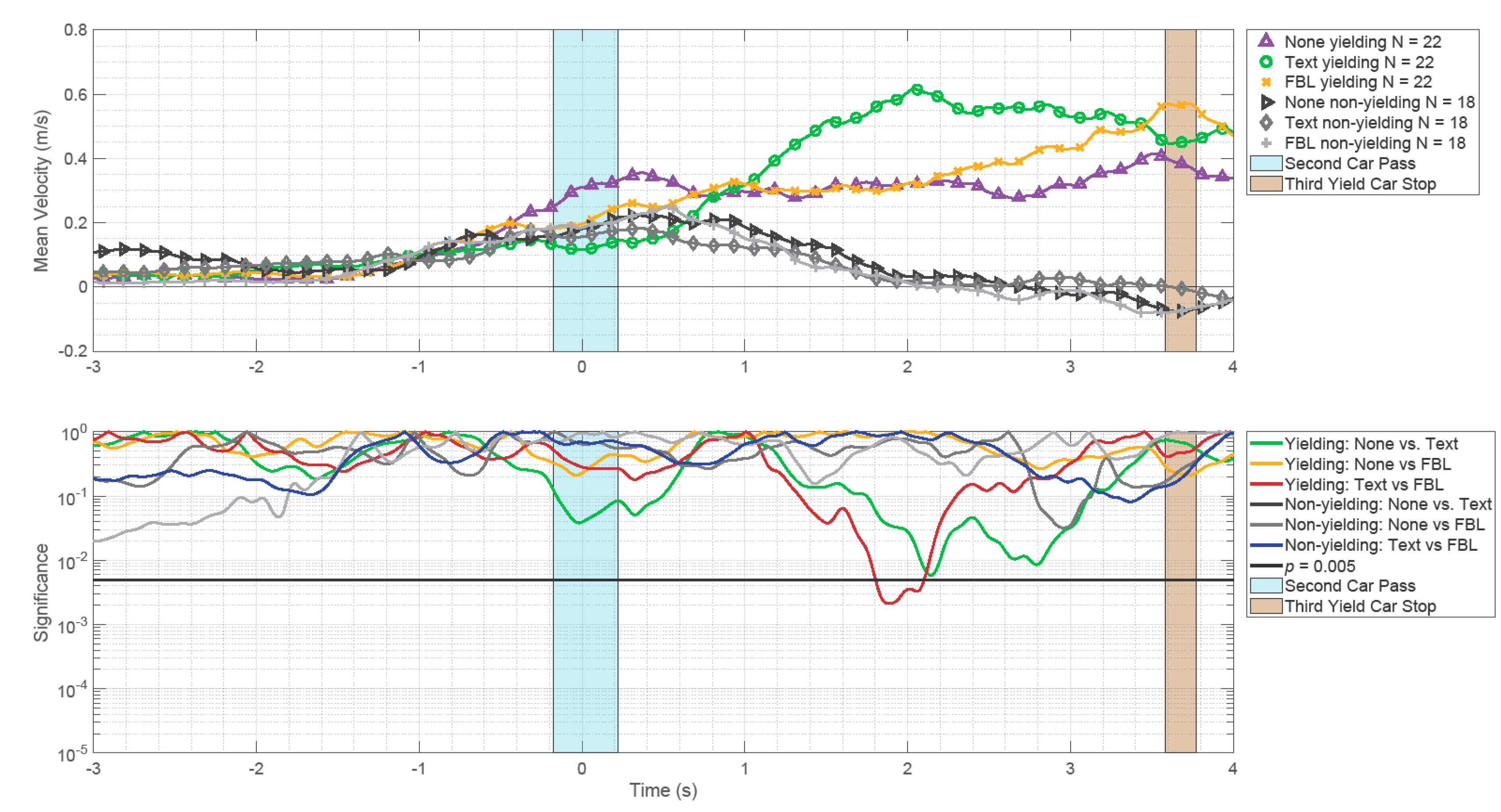
3.2.2. Thirty Meters Condition
3.3. Moment Leaving Curb (MLC)
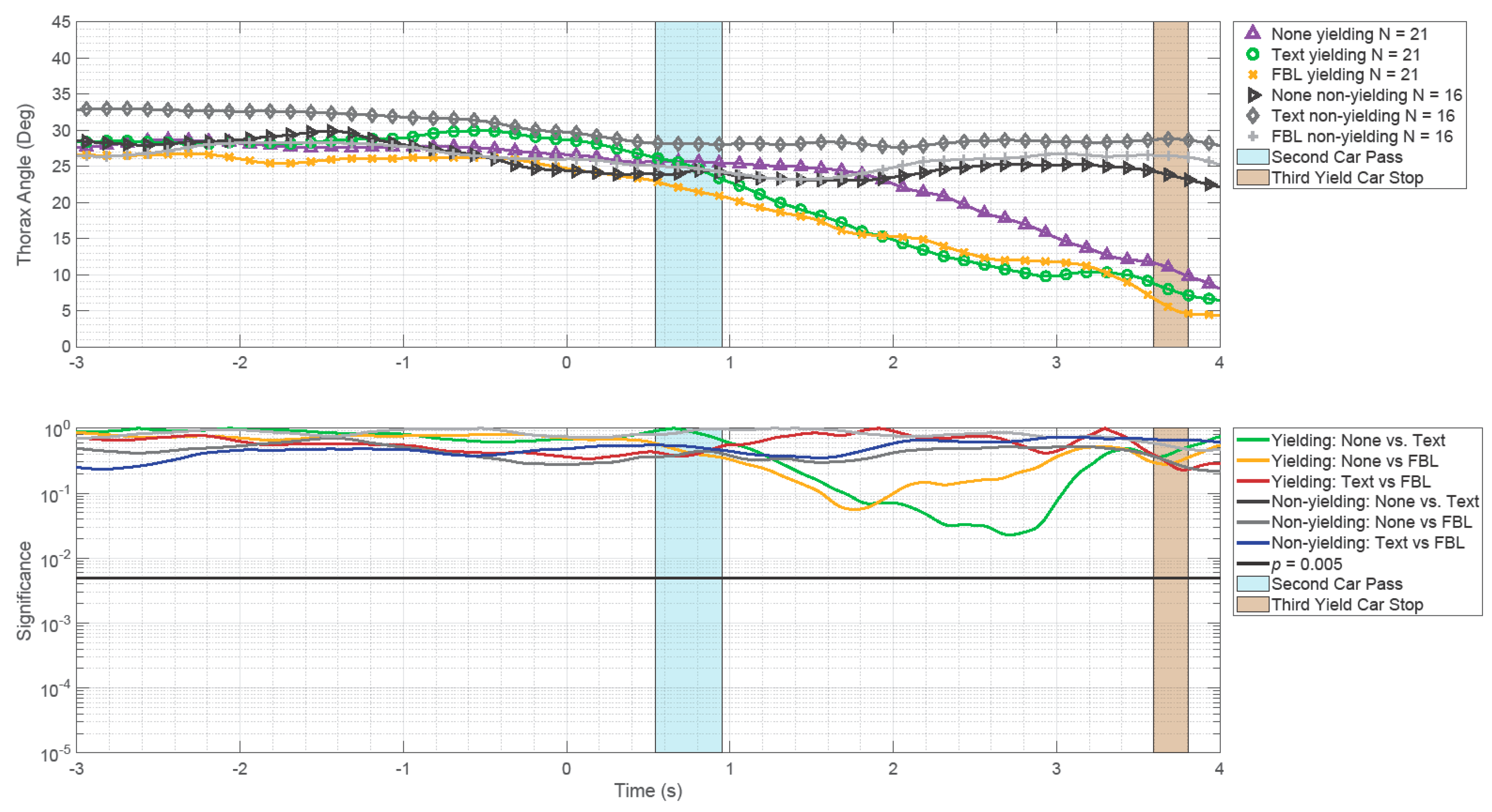
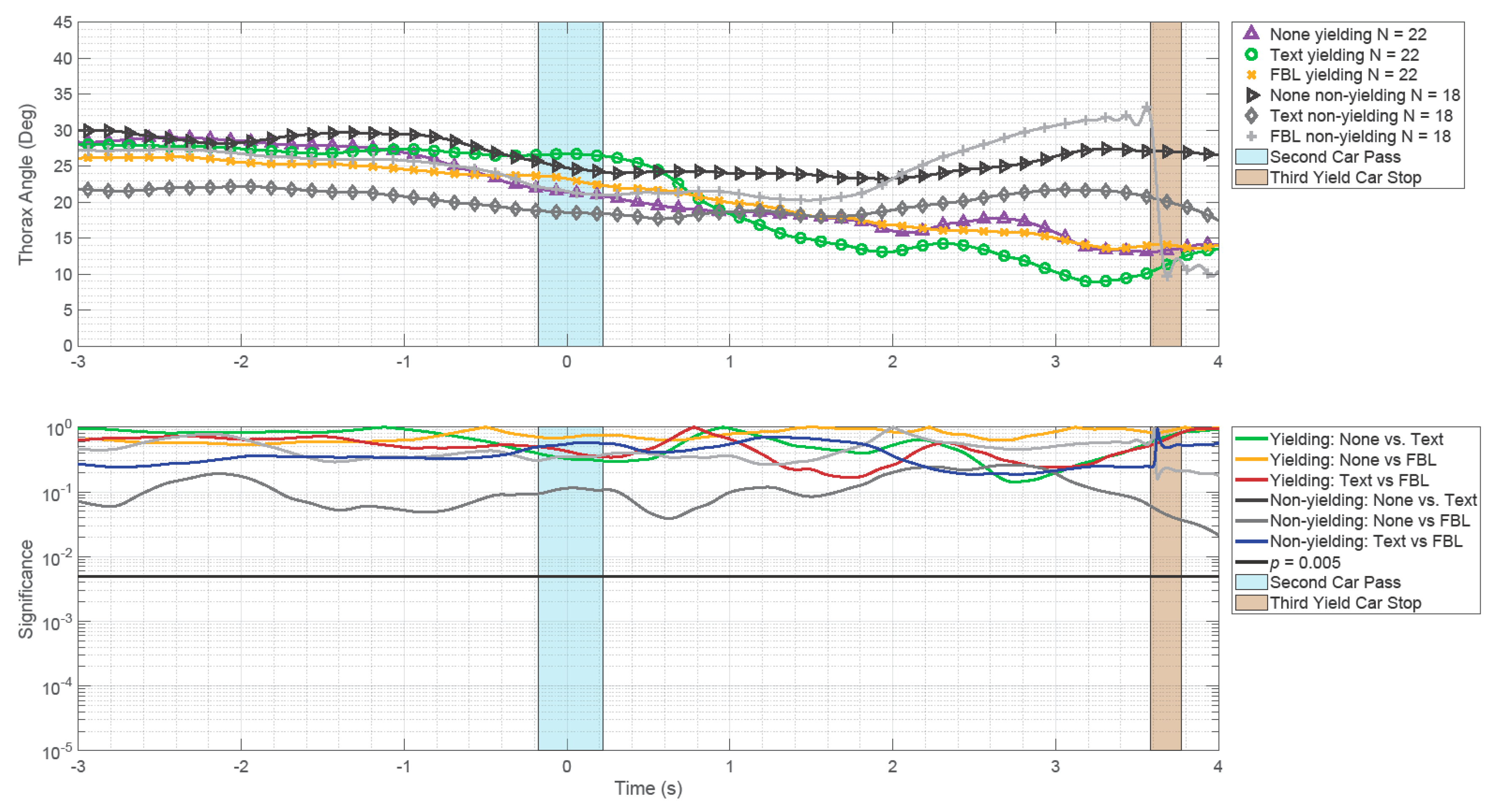
3.4. Thorax Angle
3.5. Self-Reported Predictability of Car Behavior
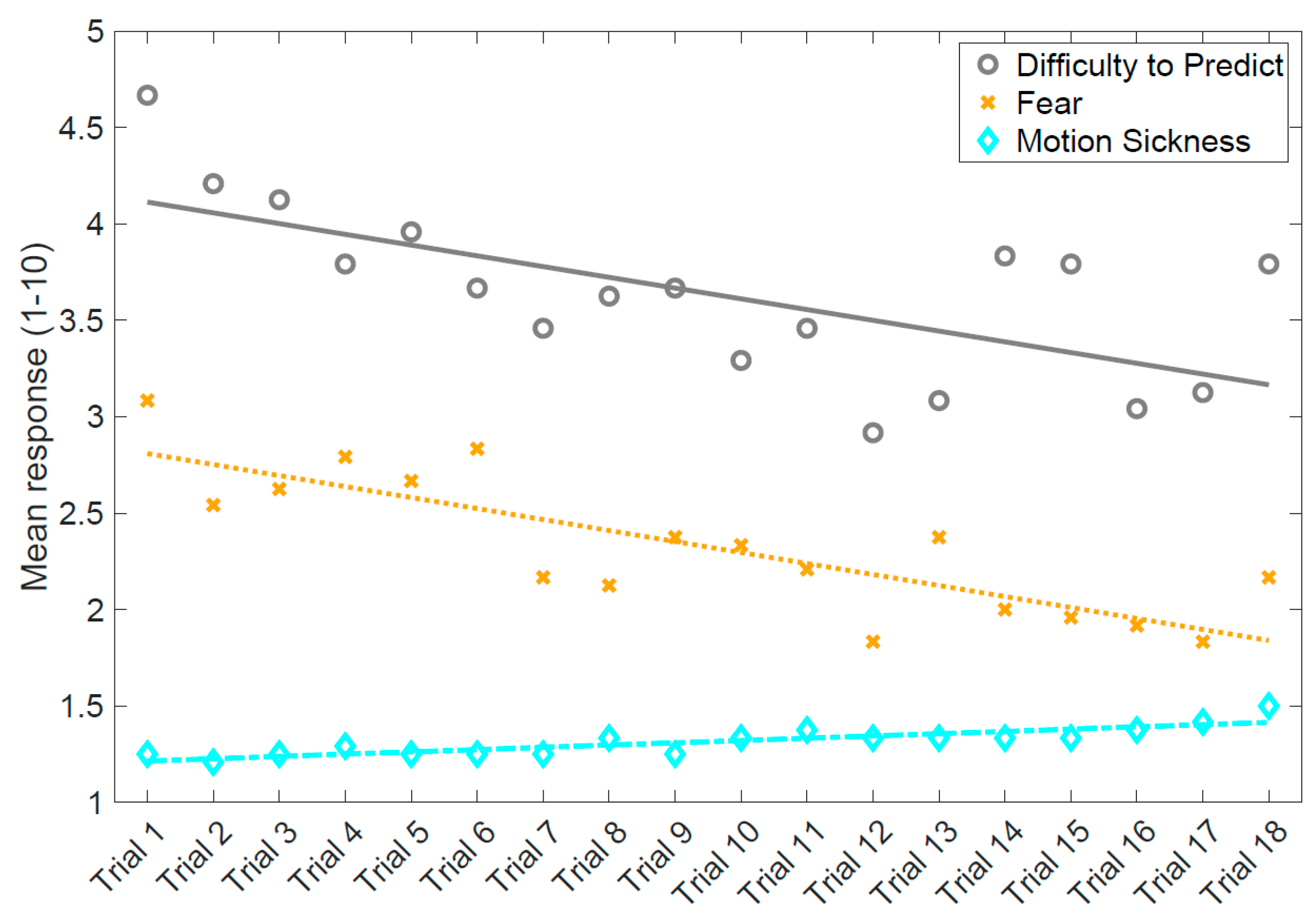
3.6. Reported User Experience
4. Discussion
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- WHO. Global Status Report on Road Safety; WHO: Geneva, Switzerland, 2015. [Google Scholar]
- Singh, S. Critical Reasons for Crashes Investigated in the Nation Motor Vehicle Crash Causation Survey; National Highway Traffic Safety Administration: Washington, DC, USA, 2015. [Google Scholar]
- Milakis, D.; Snelder, M.; Van Arem, B.; Van Wee, B.; De Almeida Correia, G.H. Development and transport implications of automated vehicles in the Netherlands: Scenarios for 2030 and 2050. Eur. J. Transp. Infrastruct. Res. 2017, 17, 63–85. [Google Scholar]
- Matthews, M.; Chowdhary, G.; Kieson, E. Intent communication between autonomous vehicles and pedestrians. arXiv 2017, arXiv:1708.07123. [Google Scholar]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Agreeing to cross: How drivers and pedestrians communicate. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 264–269. [Google Scholar]
- Fridman, L.; Mehler, B.; Xia, L.; Yang, Y.; Facusse, L.Y.; Reimer, B. To walk or not to walk: Crowdsourced assessment of external vehicle-to-pedestrian displays. arXiv 2017, arXiv:1707.02698. [Google Scholar]
- Chang, C.M.; Toda, K.; Igarashi, T.; Miyata, M.; Kobayashi, Y. A video-based study comparing communication modalities between an autonomous car and a pedestrian. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; pp. 104–109. [Google Scholar]
- Ackermann, C.; Beggiato, M.; Schubert, S.; Krems, J.F. An experimental study to investigate design and assessment criteria: What is important for communication between pedestrians and automated vehicles? Appl. Ergon. 2019, 75, 272–282. [Google Scholar] [CrossRef] [PubMed]
- Bazilinskyy, P.; Dodou, D.; De Winter, J.C.F. Survey on eHMI concepts: The effect of text, color, and perspective. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 175–194. [Google Scholar] [CrossRef]
- Deb, S.; Hudson, C.R.; Carruth, D.W.; Frey, D. Pedestrians receptivity in autonomous vehicles: Exploring a video-based assessment. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 2061–2065. [Google Scholar] [CrossRef] [Green Version]
- Hagenzieker, M.P.; Van der Kint, S.; Vissers, L.; Van Schagen, I.N.L.G.; De Bruin, J.; Van Gent, P.; Commandeur, J.J.F. Interactions between cyclists and automated vehicles: Results of a photo experiment. J. Transp. Saf. Secur. 2019. [Google Scholar] [CrossRef] [Green Version]
- Dey, D.; Martens, M.; Eggen, B.; Terken, J. Pedestrian road-crossing willingness as a function of vehicle automation, external appearance, and driving behaviour. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 191–205. [Google Scholar] [CrossRef]
- Zhang, J.; Vinkhuyzen, E.; Cefkin, M. Evaluation of an autonomous vehicle external communication system concept: A survey study. In International Conference on Applied Human Factors and Ergonomics; Springer: Berlin/Heidelberg, Germany, 2017; pp. 650–661. [Google Scholar]
- Mahadevan, K.; Sanoubari, E.; Somanath, S.; Young, J.E.; Sharlin, E. AV-Pedestrian interaction design using a pedestrian mixed traffic simulator. In Proceedings of the 2019 on Designing Interactive Systems Conference, San Diego, CA, USA, 18 June 2019; pp. 475–486. [Google Scholar]
- Nuñez Velasco, P.; Farah, H.; Van Arem, B.; Hagenzieker, M. WEpod WElly in Delft: Pedestrians’ crossing behaviour when interacting with automated vehicles using Virtual Reality. In Proceedings of the 15th International Conference on Travel Behaviour Research, Santa Barbara, CA, USA, 15–20 July 2018. [Google Scholar]
- Schmidt, H.; Terwilliger, J.; AlAdawy, D.; Fridman, L. Hacking nonverbal communication between pedestrians and vehicles in virtual reality. arXiv 2016, arXiv:1904.01931. [Google Scholar]
- Walker, F.; Dey, D.; Martens, M.; Pfleging, B.; Eggen, B.; Terken, J. Feeling-of-safety slider: Measuring pedestrian willingness to cross roads in field interactions with vehicles. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar]
- De Clercq, K.; Dietrich, A.; Núñez Velasco, J.P.; De Winter, J.; Happee, R. External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Hum. Factors 2019, 61, 1353–1370. [Google Scholar] [CrossRef] [Green Version]
- Ackermans, S.C.A. The Effects of Attitudes, Autonomous Appearance and Intention Communication in Pedestrian Interactions with Autonomous Vehicles. Master’s Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2019. [Google Scholar]
- Weber, F.; Chadowitz, R.; Schmidt, K.; Messerschmidt, J.; Fuest, T. Crossing the street across the globe: A study on the effects of eHMI on pedestrians in the US, Germany and China. In HCI in Mobility, Transport, and Automotive Systems. HCII 2019; Lecture Notes in Computer Science; Krömker, H., Ed.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11596. [Google Scholar]
- Clamann, M.; Aubert, M.; Cummings, M.L. Evaluation of vehicle-to-pedestrian communication displays for autonomous vehicles. In Proceedings of the TRB 96th Annual Meeting Compendium of Papers 2017, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Palmeiro, A.R.; Van der Kint, S.; Vissers, L.; Farah, H.; De Winter, J.C.F.; Hagenzieker, M. Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 1005–1020. [Google Scholar] [CrossRef] [Green Version]
- Cefkin, M.; Zhang, J.; Stayton, E.; Vinkhuyzen, E. Multi-methods research to examine external HMI for highly automated vehicles. In HCI in Mobility, Transport, and Automotive Systems. HCII 2019; Lecture Notes in Computer Science; Krömker, H., Ed.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11596. [Google Scholar]
- Rothenbücher, D.; Li, J.; Sirkin, D.; Mok, B.; Ju, W. Ghost driver: A field study investigating the interaction between pedestrians and driverless vehicles. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 795–802. [Google Scholar]
- Feldstein, I.; Dietrich, A.; Milinkovic, S.; Bengler, K. A pedestrian simulator for urban crossing scenarios. IFAC PapersOnLine 2016, 49, 239–244. [Google Scholar] [CrossRef]
- Le Lee, Y.M.; Uttley, J.; Solernou, A.; Giles, O.; Romano, R.; Markkula, G.; Merat, N. Investigating pedestrians’ crossing behaviour during car deceleration using wireless head mounted display: An application towards the evaluation of eHMI of automated vehicles. In Proceedings of the Tenth International Driving Symposium on Human Factors in Driving Assessment, Training and Vehicle Design. 2019 Driving Assessment Conference, Santa Fe, NM, USA, 24–27 June 2019; pp. 252–258. [Google Scholar]
- Feldstein, I.T.; Lehsing, C.; Dietrich, A.; Bengler, K. Pedestrian simulators for traffic research: State of the art and future of a motion lab. Int.J. Human Factors Model. Simul. 2018, 6, 250–265. [Google Scholar] [CrossRef]
- MVN Analyze [Computer Software]. Motion Capture Software. Available online: https://www.xsens.com/products/mvn-analyze (accessed on 28 November 2019).
- Papadimitriou, E.; Lassarre, S.; Yannis, G. Human factors of pedestrian walking and crossing behaviour. Transp. Res. Procedia 2017, 25, 2002–2015. [Google Scholar] [CrossRef]
- Witmer, B.G.; Jerome, C.J.; Singer, M.J. The factor structure of the presence questionnaire. Presence Teleoperators Virtual Environ. 2005, 14, 298–312. [Google Scholar] [CrossRef]
- Roether, C.L.; Omlor, L.; Christensen, A.; Giese, M.A. Critical features for the perception of emotion from gait. J. Vis. 2009, 9, 15. [Google Scholar] [CrossRef]
- Crane, E.; Gross, M. Motion capture and emotion: Affect detection in whole body movement. In International Conference on Affective Computing and Intelligent Interaction; Springer: Berlin/Heidelberg, Germany, 2007; pp. 95–101. [Google Scholar]
- Schreven, S.; Beek, P.J.; Smeets, J.B. Optimising filtering parameters for a 3D motion analysis system. J. Electromyogr. Kinesiol. 2015, 25, 808–814. [Google Scholar] [CrossRef] [Green Version]
- Turner, S.D. qqman: An R package for visualizing GWAS results using QQ and manhattan plots. Biorxiv 2014, 5165. [Google Scholar] [CrossRef]
- Be Benjamin, D.J.; Berger, J.O.; Johannesson, M.; Nosek, B.A.; Wagenmakers, E.J.; Berk, R.; Bollen, K.A.; Brembs, B.; Brown, L.; Camerer, C.; et al. Redefine statistical significance. Nat. Hum. Behav. 2018, 2, 6–10. [Google Scholar] [CrossRef]
- Doric, I.; Frison, A.K.; Wintersberger, P.; Riener, A.; Wittmann, S.; Zimmermann, M.; Brandmeier, T. A novel approach for researching crossing behavior and risk acceptance: The pedestrian simulator. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; pp. 39–44. [Google Scholar]
- Petkova, V.I.; Ehrsson, H.H. If I were you: Perceptual illusion of body swapping. PLoS ONE 2018, 3, e3832. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.M.; Madigan, R.; Markkula, G.; Pekkanen, J.; Merat, N.; Avsar, H.; Utesch, F.; Schieben, A.; Schießl, C.; Dietrich, A.; et al. interACT D.6.1. Methodologies for the Evaluation and Impact Assessment of the InterACT Solutions. Available online: https://www.interact-roadautomation.eu/wp-content/uploads/interACT_D6.1_01082019_v1.0_uploadWebsite_approved_reduced-size-1.pdf (accessed on 17 November 2019).
- Eisma, Y.B.; Bergen, S.; Brake, S.; Hensen, M.; Tempelaar, W.; De Winter, J.C.F. External human-machine interfaces: The effect of display location on crossing intentions and eye movements. Information 2020, 11, 13. [Google Scholar]
- Flohr, F.; Dumitru-Guzu, M.; Kooij, J.F.; Gavrila, D.M. A probabilistic framework for joint pedestrian head and body orientation estimation. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1872–1882. [Google Scholar] [CrossRef]
- Kooij, J.F.P.; Schneider, N.; Flohr, F.; Gavrila, D.M. Context-based pedestrian path prediction. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2014; pp. 618–633. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Front Brake Lights, yielding |  |
| Front Brake Lights, nonyielding |  |
| Text eHMI, yielding |  |
| Text eHMI, nonyielding |  |
| No eHMI, yielding and nonyielding |  |
| None | Text | Front Brake Lights | |
|---|---|---|---|
| M (SD) | M (SD) | M (SD) | |
| 20 meters yielding | 3.67 (0.99) | 2.75 (1.25) | 2.97 (1.21) |
| 30 meters yielding | 2.94 (1.71) | 2.28 (1.02) | 2.59 (1.67) |
| 20 meters yielding | t-test None – Text | t(20) = 5.79, p< 0.001 | |
| 20 meters yielding | t-test None – FBL | t(20) = 3.94, p< 0.001 | |
| 20 meters yielding | t-test Text – FBL | t(20) = −1.40, p = 0.175 | |
| 30 meters yielding | t-test None – Text | t(21) = 2.10, p = 0.048 | |
| 30 meters yielding | t-test None – FBL | t(21) = 1.10, p = 0.284 | |
| 30 meters yielding | t-test Text – FBL | t(21) = –1.12, p = 0.274 |
| None | Text | Front Brake Lights | |
|---|---|---|---|
| M (SD) | M (SD) | M (SD) | |
| 20 meters yielding | 4.48 (2.18) | 2.43 (1.33) | 3.43 (2.23) |
| 20 meters nonyielding | 3.63 (2.42) | 2.25 (1.53) | 3.88 (2.09) |
| 30 meters yielding | 4.36 (2.56) | 2.91 (1.97) | 4.00 (2.51) |
| 30 meters nonyielding | 4.28 (2.65) | 2.89 (2.22) | 4.06 (2.21) |
| 20 meters yielding | t-test None vs. Text | t(20) = 4.10, p< 0.001 | |
| 20 meters yielding | t-test None vs. FBL | t(20) = 2.02, p = 0.057 | |
| 20 meters yielding | t-test Text vs. FBL | t(20) = −1.80, p = 0.087 | |
| 20 meters nonyielding | t-test None vs. Text | t(15) = 2.59, p = 0.021 | |
| 20 meters nonyielding | t-test None vs. FBL | t(15) = –0.62, p = 0.545 | |
| 20 meters nonyielding | t-test Text vs. FBL | t(15) = −3.64, p= 0.002 | |
| 30 meters yielding | t-test None vs. Text | t(21) = 2.71, p= 0.013 | |
| 30 meters yielding | t-test None vs. FBL | t(21) = 0.76, p = 0.459 | |
| 30 meters yielding | t-test Text vs. FBL | t(21) = −2.11, p = 0.047 | |
| 30 meters nonyielding | t-test None vs. Text | t(17) = 2.98, p= 0.008 | |
| 30 meters nonyielding | t-test None vs. FBL | t(17) = 0.42, p = 0.679 | |
| 30 meters nonyielding | t-test Text vs. FBL | t(17) = −2.87, p= 0.011 |
| Responses Per Study | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Kooijman et al. | De Clercq et al. | ||||||||
| M | SD | N | M | SD | N | p | t | df | |
| Involvement | 5.10 | 0.65 | 24 | 4.94 | 0.62 | 28 | 0.375 | 0.89 | 50 |
| Sensor Fidelity | 4.79 | 1.01 | 24 | 5.07 | 0.72 | 28 | 0.251 | −1.16 | 50 |
| Adaptation/Immersion | 5.56 | 0.64 | 24 | 5.68 | 0.72 | 28 | 0.546 | −0.61 | 50 |
| Interface Quality | 3.19 | 0.97 | 24 | 2.99 | 1.03 | 28 | 0.462 | 0.74 | 50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kooijman, L.; Happee, R.; de Winter, J.C.F. How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit. Information 2019, 10, 386. https://0-doi-org.brum.beds.ac.uk/10.3390/info10120386
Kooijman L, Happee R, de Winter JCF. How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit. Information. 2019; 10(12):386. https://0-doi-org.brum.beds.ac.uk/10.3390/info10120386
Chicago/Turabian StyleKooijman, Lars, Riender Happee, and Joost C. F. de Winter. 2019. "How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit" Information 10, no. 12: 386. https://0-doi-org.brum.beds.ac.uk/10.3390/info10120386