A Multi-Objective Optimization Problem on Evacuating 2 Robots from the Disk in the Face-to-Face Model; Trade-Offs between Worst-Case and Average-Case Analysis †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Work
1.2. Discussion on Closely Related Literature and Improvements
1.3. Outline of Our Results and Paper Organization
2. Preliminaries
2.1. Problem Definition and Main Results
2.2. Computing Evacuation Times
2.3. Trajectory Description
| Robot | Phase # | Trajectory | Duration |
| 1 | |||
| 2 | |||
| ⋮ | ⋮ |
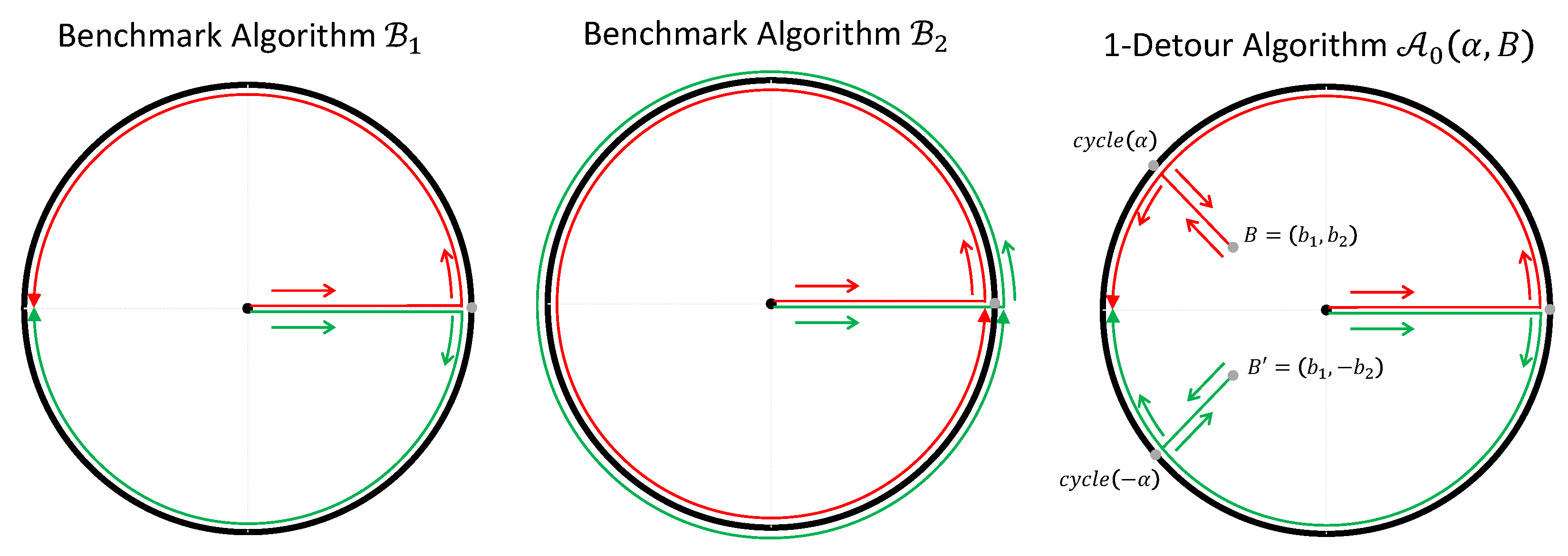
3. Two Benchmark Algorithms and Motivation
| Robot | Phase # | Trajectory | Duration |
| 1 | |||
| 2 | |||
| 3 | |||
| 4 |
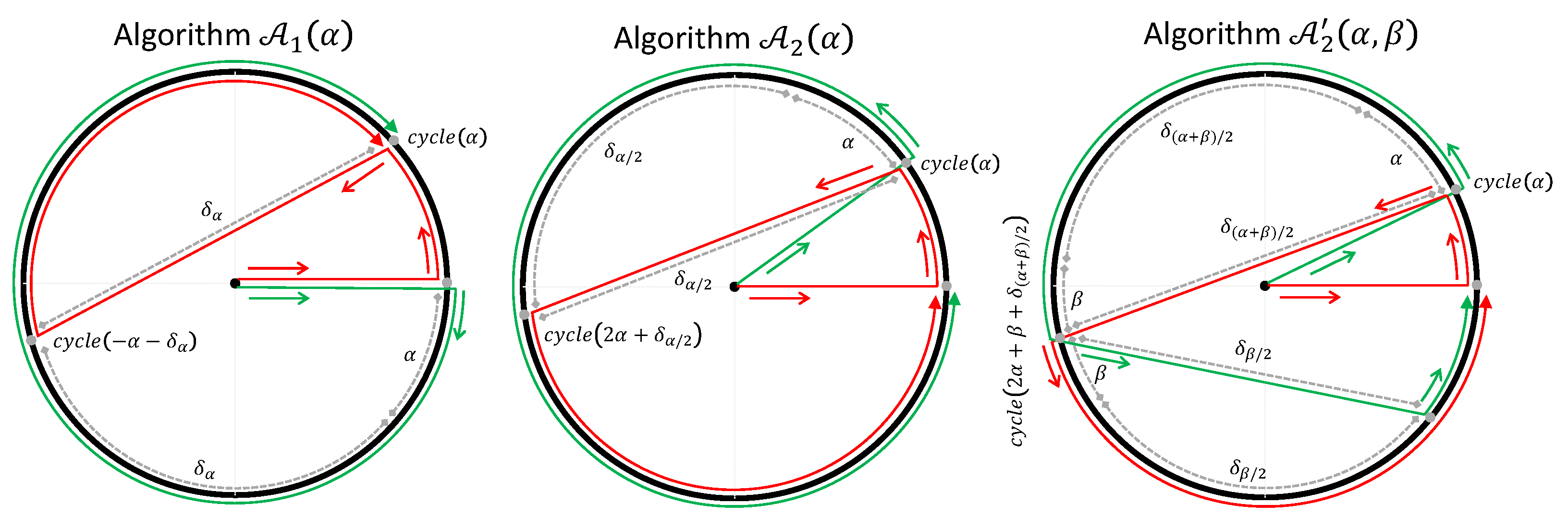
4. New Evacuation Algorithms
| Robot | Phase # | Trajectory | Duration |
| 1 | |||
| 2 | |||
| 3 |
| Robot | Phase # | Trajectory | Duration |
| 1 | |||
| 2 | |||
| 3 |
| Robot | Phase # | Trajectory | Duration |
| 1 | |||
| 2 | |||
| 3 | |||
| 1 | |||
| 2 | |||
| 3 |
5. Worst-Case Performance Analysis
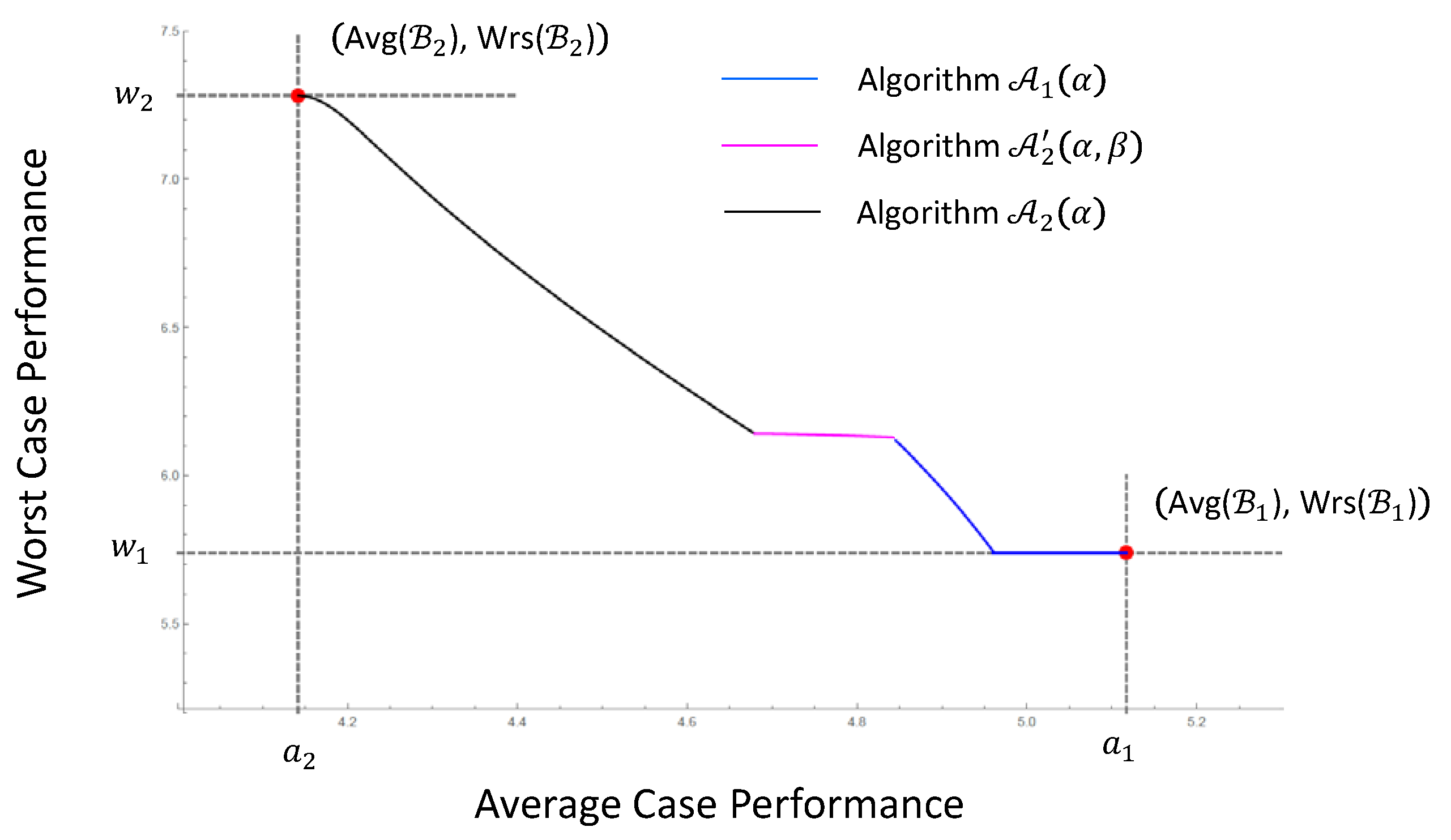
6. Average-Case Performance Analysis and the Efficient Frontier
- -
- for all , is -efficient, and ,
- -
- for all , is -efficient, and ,
- -
- for all , is -efficient, and .
7. Conclusions and Open Problems
- -
- Prove lower bounds for Evac, for any w. Is any of our algorithms, for any w optimal?
- -
- For the value , we designed algorithm for Evac which for a proper value of a has worst-case performance exactly w, while its average-case performance is strictly less than . Is it feasible to attain worst-case performance strictly less than w, while having average-case performance at most ?
- -
- The bound to the efficient (pareto) frontier we derived for problem Evac is indeed continuous, with respect to parameter w, but not differentiable. Is the optimal pareto frontier smooth, or is there any other family of algorithms that improves upon our results and gives a smooth transition between families of evacuation algorithms?
- -
- The algorithmic families we derived for Evac exhibit the following property. is a natural extension to . Similarly, is a natural extension to . Finally, is a natural extension to . However, and have different behavior (there are no values of their parameters that induce the same evacuation protocol), even though for a proper choice of their parameters, they induce algorithms with the same worst-case and average-case performance.
- -
- Observe that the average-case performance of is . All our evacuation algorithms induce average cost at least . We conjecture that even in the wireless model, as well as for any number of robots, is tight lower bound for the average performance of evacuation algorithm.
- -
- Our algorithms can also be interpreted as randomized algorithms that have access to infinitely many bits (or enough many bits, in order to simulate a uniformly random deployment point on the circle). What if the algorithm has access only to a limited number of random bits?
- -
- To the best of our knowledge, the current paper is the first attempt to study multi-objective optimization search-type problems. It was followed by [48,49] who considered time energy trade-offs for a search problems on the line. This line of research admits many future directions based on any combination of multiple objectives, e.g., worst-case, average-case and competitive cost, time, energy and any other efficiency measure, or even trade-offs involving number of faults or even complexity resources, e.g., memory, communication or randomness.
Author Contributions
Funding
Conflicts of Interest
References
- Czyzowicz, J.; Gasieniec, L.; Gorry, T.; Kranakis, E.; Martin, R.; Pajak, D. Evacuating Robots via Unknown Exit in a Disk. In Proceedings of the DISC, Austin, TX, USA, 12–15 October 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 122–136. [Google Scholar]
- Beck, A. On the linear search problem. Isr. J. Math. 1964, 2, 221–228. [Google Scholar] [CrossRef]
- Bellman, R. An optimal search. SIAM Rev. 1963, 5, 274. [Google Scholar] [CrossRef]
- Dobbie, J. A survey of search theory. Oper. Res. 1968, 16, 525–537. [Google Scholar] [CrossRef]
- Benkoski, S.; Monticino, M.; Weisinger, J. A survey of the search theory literature. Nav. Res. Logist. (NRL) 1991, 38, 469–494. [Google Scholar] [CrossRef]
- Stone, L. Theory of Optimal Search; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Ahlswede, R.; Wegener, I. Search Problems; Wiley-Interscience: New York, NY, USA, 1987. [Google Scholar]
- Alpern, S.; Gal, S. The Theory of Search Games and Rendezvous; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2002; Volume 55. [Google Scholar]
- Alpern, S.; Fokkink, R.; Gasieniec, L.; Lindelauf, R.; Subrahmanian, V. (Eds.) Ten Open Problems in Rendezvous Search. In Search Theory: A Game Theoretic Perspective; Springer: New York, NY, USA, 2013; pp. 223–230. [Google Scholar]
- Albers, S.; Henzinger, M.R. Exploring unknown environments. SIAM J. Comput. 2000, 29, 1164–1188. [Google Scholar] [CrossRef] [Green Version]
- Albers, S.; Kursawe, K.; Schuierer, S. Exploring unknown environments with obstacles. Algorithmica 2002, 32, 123–143. [Google Scholar] [CrossRef] [Green Version]
- Deng, X.; Kameda, T.; Papadimitriou, C. How to learn an unknown environment. In Proceedings of the 32nd Annual Symposium of Foundations of Computer Science, San Juan, Puerto Rico, 1–4 October 1991; pp. 298–303. [Google Scholar]
- Hoffmann, F.; Icking, C.; Klein, R.; Kriegel, K. The polygon exploration problem. SIAM J. Comput. 2001, 31, 577–600. [Google Scholar] [CrossRef] [Green Version]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2005, 21, 376–386. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. A probabilistic on-line mapping algorithm for teams of mobile robots. Int. J. Robot. Res. 2001, 20, 335–363. [Google Scholar] [CrossRef]
- Yamauchi, B. Frontier-based exploration using multiple robots. In Proceedings of the Second International Conference on Autonomous Agents, Minneapolis, MI, USA, 9–13 May 1998; ACM: New York, NY, USA, 1998; pp. 47–53. [Google Scholar]
- Kleinberg, J. On-line search in a simple polygon. In Proceedings of the SODA, Arlington, VA, USA, 23–25 January 1994; p. 8. [Google Scholar]
- Mitchell, J.S. Geometric shortest paths and network optimization. Handb. Comput. Geom. 2000, 334, 633–702. [Google Scholar]
- Papadimitriou, C.H.; Yannakakis, M. Shortest paths without a map. In ICALP; Springer: Berlin/Heidelberg, Germany, 1989; pp. 610–620. [Google Scholar]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics. Auton. Robot. 2011, 31, 299–316. [Google Scholar]
- Fomin, F.V.; Thilikos, D.M. An annotated bibliography on guaranteed graph searching. Theor. Comput. Sci. 2008, 399, 236–245. [Google Scholar]
- Lidbetter, T. Hide-and-Seek and other Search Games. Ph.D. Thesis, The London School of Ecoomics and Political Science (LSE), London, UK, 2013. [Google Scholar]
- Nahin, P. Chases and Escapes: The Mathematics of Pursuit and Evasion; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Baumann, N.; Skutella, M. Earliest arrival flows with multiple sources. Math. Oper. Res. 2009, 34, 499–512. [Google Scholar]
- Fekete, S.; Gray, C.; Kröller, A. Evacuation of rectilinear polygons. In Combinatorial Optimization and Applications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 21–30. [Google Scholar]
- Czyzowicz, J.; Georgiou, K.; Kranakis, E.; Narayanan, L.; Opatrny, J.; Vogtenhuber, B. Evacuating Robots from a Disc Using Face to Face Communication. In Proceedings of the CIAC 2015, Paris, France, 20–22 May 2015; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Brandt, S.; Laufenberg, F.; Lv, Y.; Stolz, D.; Wattenhofer, R. Collaboration without Communication: Evacuating Two Robots from a Disk. In Proceedings of the Algorithms and Complexity—10th International Conference, CIAC, Athens, Greece, 24–26 May 2017; pp. 104–115. [Google Scholar]
- Disser, Y.; Schmitt, S. Evacuating two robots from a disk: A second cut. In International Colloquium on Structural Information and Communication Complexity; Lecture Notes in Computer Science; Censor-Hillel, K., Flammini, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11639, pp. 200–214. [Google Scholar]
- Czyzowicz, J.; Dobrev, S.; Georgiou, K.; Kranakis, E.; MacQuarrie, F. Evacuating two robots from multiple unknown exits in a circle. Theor. Comput. Sci. 2018, 709, 20–30. [Google Scholar]
- Pattanayak, D.; Ramesh, H.; Mandal, P.S.; Schmid, S. Evacuating Two Robots from Two Unknown Exits on the Perimeter of a Disk with Wireless Communication. In Proceedings of the 19th International Conference on Distributed Computing and Networking, ICDCN 2018, Varanasi, India, 4–7 January 2018; Bellavista, P., Garg, V.K., Eds.; ACM: New York, NY, USA, 2018; pp. 20:1–20:4. [Google Scholar]
- Chuangpishit, H.; Mehrabi, S.; Narayanan, L.; Opatrny, J. Evacuating equilateral triangles and squares in the face-to-face model. Comput. Geom. 2020, 89, 101624. [Google Scholar]
- Czyzowicz, J.; Kranakis, E.; Krizanc, D.; Narayanan, L.; Opatrny, J.; Shende, S. Wireless Autonomous Robot Evacuation from Equilateral Triangles and Squares. In Proceedings of the Ad-hoc, Mobile, and Wireless Networks, ADHOC-NOW, Athens, Greece, 29 June–1 July 2015; pp. 181–194. [Google Scholar]
- Brandt, S.; Foerster, K.T.; Richner, B.; Wattenhofer, R. Wireless evacuation on m rays with k searchers. Theor. Comput. Sci. 2020, 811, 56–69. [Google Scholar]
- Angelopoulos, S.; Dürr, C.; Lidbetter, T. The expanding search ratio of a graph. Discret. Appl. Math. 2019, 260, 51–65. [Google Scholar]
- Borowiecki, P.; Das, D.; Dereniowski, D.; Kuszner, L. Distributed Evacuation in Graphs with Multiple Exits. In Structural Information and Communication Complexity, Proceedings of the 23rd International Colloquium, SIROCCO 2016, Helsinki, Finland, 19–21 July 2016; Revised Selected Papers, Lecture Notes in Computer Science; Suomela, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2016; Volume 9988, pp. 228–241. [Google Scholar]
- Chrobak, M.; Gasieniec, L.T.G.; Martin, R. Group Search on the Line. In SOFSEM 2015; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Georgiou, K.; Lucier, J. Weighted Group Search on a Line. In Proceedings of the 16th International Symposium on Algorithms and Experiments for Wireless Sensor Networks, ALGOSENSORS, Pisa, Italy, 7–11 September 2020. [Google Scholar]
- Baeza Yates, R.; Culberson, J.; Rawlins, G. Searching in the plane. Inf. Comput. 1993, 106, 234–252. [Google Scholar]
- Czyzowicz, J.; Georgiou, K.; Godon, M.; Kranakis, E.; Krizanc, D.; Rytter, W.; Włodarczyk, M. Evacuation from a disc in the presence of a faulty robot. In International Colloquium on Structural Information and Communication Complexity; Springer: Berlin/Heidelberg, Germany, 2017; pp. 158–173. [Google Scholar]
- Georgiou, K.; Kranakis, E.; Leonardos, N.; Pagourtzis, A.; Papaioannou, I. Optimal Cycle Search Despite the Presence of Faulty Robots. In Algorithms for Sensor Systems, Proceedings of the 15th International Symposium on Algorithms and Experiments for Wireless Sensor Networks, ALGOSENSORS 2019, Munich, Germany, 12–13 September 2019; Revised Selected Papers, Lecture Notes in Computer Science; Dressler, F., Scheideler, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11931, pp. 192–205. [Google Scholar]
- Pattanayak, D.; Ramesh, H.; Mandal, P.S. Chauffeuring a Crashed Robot from a Disk. In Algorithms for Sensor Systems, Proceedings of the 15th International Symposium on Algorithms and Experiments for Wireless Sensor Networks, ALGOSENSORS 2019, Munich, Germany, 12–13 September 2019; Revised Selected Papers, Lecture Notes in Computer Science; Dressler, F., Scheideler, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11931, pp. 177–191. [Google Scholar]
- Bonato, A.; Georgiou, K.; MacRury, C.; Pralat, P. Probabilistically Faulty Searching on a Half-Line. In Proceedings of the 14th Latin American Theoretical Informatics Sumposium, University of Sao Paulo, Sao Paulo, Brazil, 25–29 May 2020. [Google Scholar]
- Georgiou, K.; Kranakis, E.; Steau, A. Searching with Advice: Robot Fence-Jumping. J. Inf. Process. 2017, 25, 559–571. [Google Scholar]
- Czyzowicz, J.; Georgiou, K.; Killick, R.; Kranakis, E.; Krizanc, D.; Narayanan, L.; Opatrny, J.; Shende, S. Priority Evacuation from a Disk: The case of n ≥ 4. Theor. Comput. Sci. 2020. accepted. [Google Scholar]
- Czyzowicz, J.; Georgiou, K.; Killick, R.; Kranakis, E.; Krizanc, D.; Narayanan, L.; Opatrny, J.; Shende, S.M. Priority evacuation from a disk: The case of n = 1, 2, 3. Theor. Comput. Sci. 2020, 806, 595–616. [Google Scholar] [CrossRef]
- Georgiou, K.; Karakostas, G.; Kranakis, E. Search-and-Fetch with One Robot on a Disk—(Track: Wireless and Geometry). In Algorithms for Sensor Systems, Proceedings of the 12th International Symposium on Algorithms and Experiments for Wireless Sensor Networks, ALGOSENSORS 2016, Aarhus, Denmark, 25–26 August 2016; Revised Selected Papers; Springer: Berlin/Heidelberg, Germany, 2016; pp. 80–94. [Google Scholar]
- Georgiou, K.; Karakostas, G.; Kranakis, E. Search-and-Fetch with 2 Robots on a Disk: Wireless and Face-to-Face Communication Models. Discret. Math. Theor. Comput. Sci. 2019, 21. [Google Scholar] [CrossRef]
- Czyzowicz, J.; Georgiou, K.; Killick, R.; Kranakis, E.; Krizanc, D.; Lafond, M.; Narayanan, L.; Opatrny, J.; Shende, S. Energy Consumption of Group Search on a Line. In Leibniz International Proceedings in Informatics (LIPIcs), Proceedings of the 46th International Colloquium on Automata, Languages, and Programming (ICALP 2019), Patras, Greece, 8–12 July 2019; Baier, C., Chatzigiannakis, I., Flocchini, P., Leonardi, S., Eds.; Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik: Dagstuhl, Germany, 2019; Volume 132, pp. 137:1–137:15. [Google Scholar] [CrossRef]
- Kranakis, E.J.; Krizanc, D.K.; Georgiou, M.L.; Killick, R.; Narayanan, L.; Opatrny, J.; Shende, S. Time-Energy Tradeoffs for Evacuation by Two Robots in the Wireless Model. In Structural Information and Communication Complexity, Proceedings of the 26th International Colloquium, SIROCCO 2019, L’Aquila, Italy, 1–4 July 2019; Lecture Notes in Computer, Science; Censor-Hillel, K., Flammini, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11639, pp. 185–199. [Google Scholar]
- Lamprou, I.; Martin, R.; Schewe, S. Fast two-robot disk evacuation with wireless communication. In Proceedings of the DISC, Paris, France, 27–29 September 2016; pp. 1–15. [Google Scholar]
- Czyzowicz, J.; Kranakis, E.; Krizanc, D.; Narayanan, L.; Opatrny, J.; Shende, S.M. Linear Search with Terrain-Dependent Speeds. In Algorithms and Complexity, Proceedings of the 10th International Conference, CIAC 2017, Athens, Greece, 24–26 May 2017; Lecture Notes in Computer, Science; Fotakis, D., Pagourtzis, A., Paschos, V.T., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10236, pp. 430–441. [Google Scholar]
- Czyzowicz, J.; Georgiou, K.; Kranakis, E. Group Search and Evacuation. In Distributed Computing by Mobile Entities; Current Research in Moving and Computing; Flocchini, P., Prencipe, G., Santoro, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Chapter 14; pp. 335–370. [Google Scholar]
- López-Ortiz, A.; Sweet, G. Parallel searching on a lattice. In Proceedings of the CCCG, 13–15 August 2001; pp. 125–128. [Google Scholar]
- Emek, Y.; Langner, T.; Uitto, J.; Wattenhofer, R. Solving the ANTS Problem with Asynchronous Finite State Machines. In Automata, Languages, and Programming, Proceedings of the 41st International Colloquium, ICALP 2014, Copenhagen, Denmark, 8–11 July 2014; Lecture Notes in Computer Science, Part II; Esparza, J., Fraigniaud, P., Husfeldt, T., Koutsoupias, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8573, pp. 471–482. [Google Scholar]
- Lenzen, C.; Lynch, N.; Newport, C.; Radeva, T. Trade-offs Between Selection Complexity and Performance when Searching the Plane Without Communication. In ACM Symposium on Principles of Distributed Computing, Proceedings of the PODC ’14, Paris, France, 15–18 July 2014; HalldÃ3rsson, M.M., Dolev, S., Eds.; ACM: New York, NY, USA, 2014; pp. 252–261. [Google Scholar]
- Acharjee, S.; Georgiou, K.; Kundu, S.; Srinivasan, A. Lower Bounds for Shoreline Searching With 2 or More Robots. In Proceedings of the 23rd International Conference on Principles of Distributed Systems (OPODIS’19), Neuchâtel, Switzerland, 17–19 December 2019; Felber, P., Friedman, R., Gilbert, S., Miller, A., Eds.; Schloss Dagstuhl—Leibniz-Zentrum fur Informatik: Dagstuhl, Germany, 2019; Volume 153, pp. 26:1–26:11. [Google Scholar]
- Dobrev, S.; Kralovic, R.; Pardubska, D. Improved Lower Bounds for Shoreline Search. In Structural Information and Communication Complexity, Proceedings of the 27th International Colloquium, SIROCCO 2020, Paderborn, Germany, 29 June–1 July 2020; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Miettinen, K. Nonlinear multiobjective optimization. In International Series in Operations Research and Management Science; Kluwer: Dordrecht, The Netherlands, 1998; Volume 12, pp. 1–298. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chuangpishit, H.; Georgiou, K.; Sharma, P. A Multi-Objective Optimization Problem on Evacuating 2 Robots from the Disk in the Face-to-Face Model; Trade-Offs between Worst-Case and Average-Case Analysis. Information 2020, 11, 506. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110506
Chuangpishit H, Georgiou K, Sharma P. A Multi-Objective Optimization Problem on Evacuating 2 Robots from the Disk in the Face-to-Face Model; Trade-Offs between Worst-Case and Average-Case Analysis. Information. 2020; 11(11):506. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110506
Chicago/Turabian StyleChuangpishit, Huda, Konstantinos Georgiou, and Preeti Sharma. 2020. "A Multi-Objective Optimization Problem on Evacuating 2 Robots from the Disk in the Face-to-Face Model; Trade-Offs between Worst-Case and Average-Case Analysis" Information 11, no. 11: 506. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110506