The Effect of Motion Time of a Scots Pine Single Seed on Mobile Optoelectronic Grader Efficiency: A Mathematical Patterning


{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
3. Theoretical Assumptions
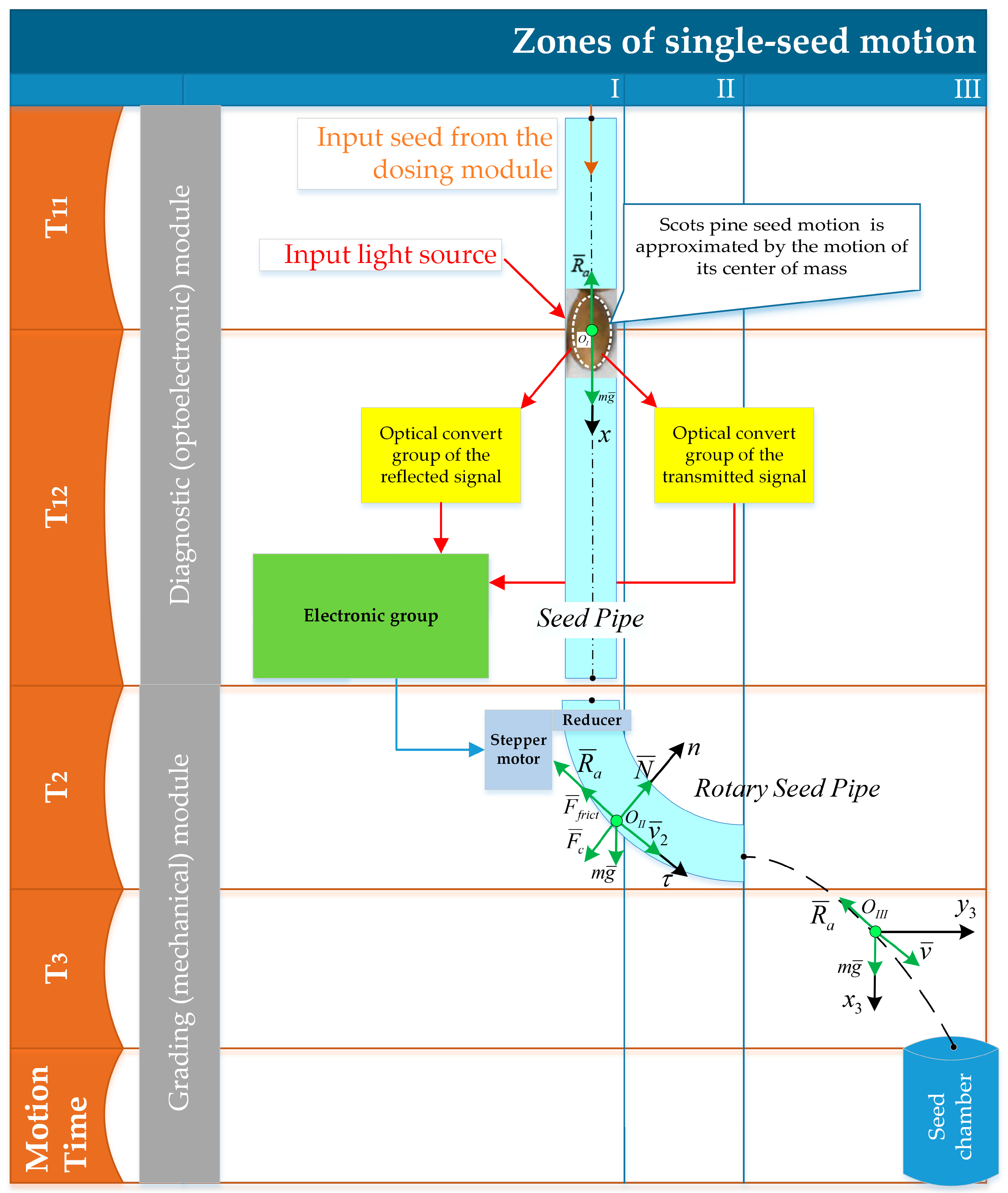
3.1. Task Definition
3.1.1. The Motion Time
3.1.2. Movement Zone I
- m is the seed mass in kg;
- is the acceleration ax of the center of mass of the seed in m·s−2;
- g is the gravity acceleration, g = 9,81 m·s−2;
- is the resultant of the resistance forces, in that cx is the dimensionless drag coefficient of the seed in the air; is the seed density, kg·m−3; SS is the square of the seed midsection, m2; v is the speed of the mass center of the seed, m·s−1.
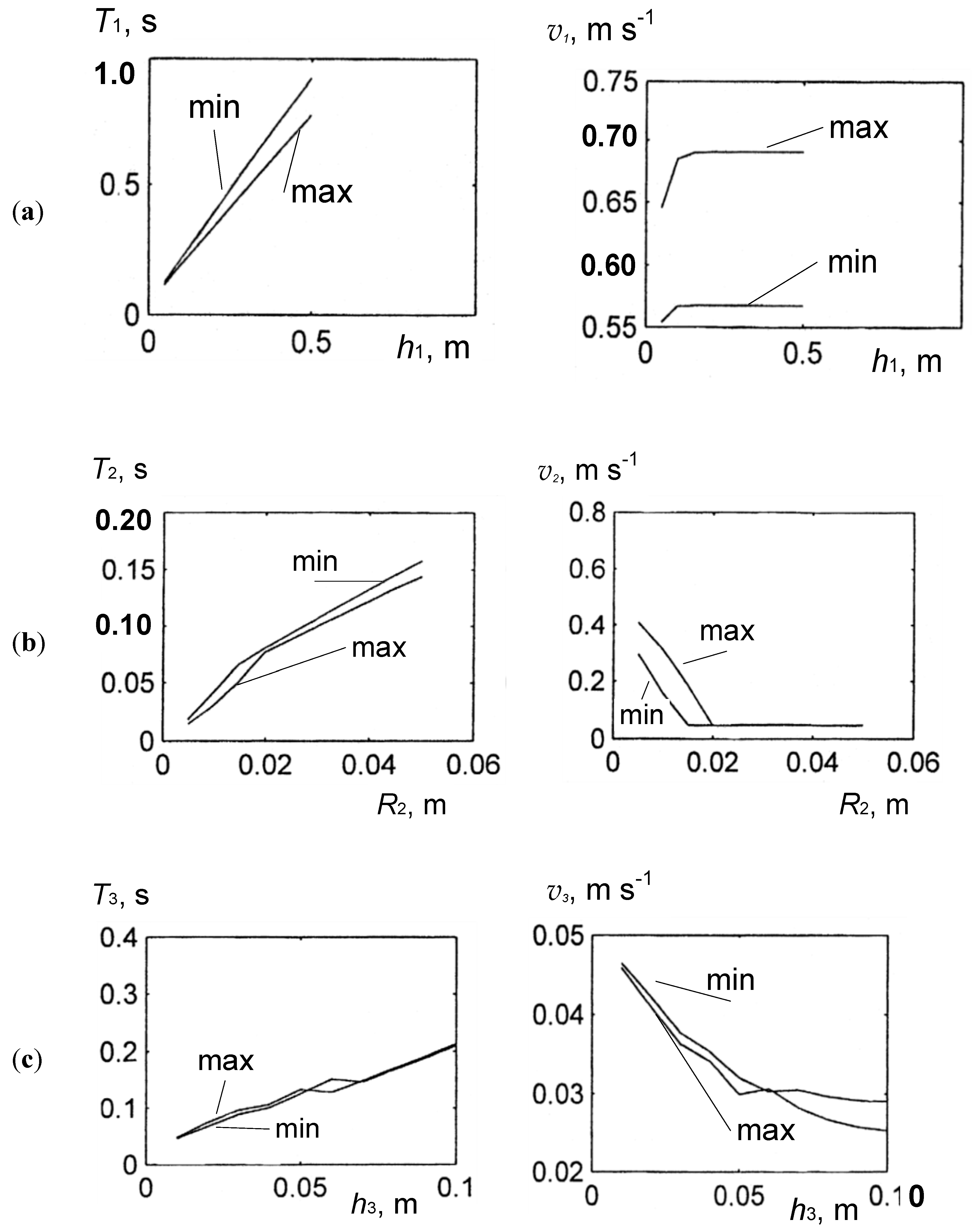
- time T1 of passage in zone I with height H1;
- height H1 of zone I at a given time T1 .
3.1.3. Movement Zone II
- is the acceleration of the mass center of seed in m·s−2;
- is the coefficient of friction;
- N is the normal force, N;
- φ is the angle of deviation of the linear velocity vector from the horizontal in rad;
- R is the curvature radius that best approximates the seed pipe’s curve at point OII in m.
- the Equation (11) with initial conditions (6) gives a solution ;
- the equation of the form will determine the time T2 during which a single seed will pass zone II;
- the equation of the form will determine the radius of curvature of the seed pipe for a given time T2;
- the speed of a single seed for all t, including the speed at the end of the corner
3.1.4. Movement Zone III
3.2. Reduction of Equations to a Dimensionless Form
3.2.1. Zone I
3.2.2. Zone II
3.2.3. Zone III
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sokolov, S.V.; Novikov, A.I. Development tendency of sowing air operating technology by unmanned aerial vehicles in artificial reforestation. For. Eng. J. 2017, 7, 190–205. [Google Scholar]
- Farhadi, M.; Tigabu, M.; Pietrzykowski, M.; Danusevičius, D.; Odén, P.C. Application of near infrared spectroscopy for authentication of Picea abies seed provenance. New For. 2017, 48, 629–642. [Google Scholar] [CrossRef]
- Farhadi, M.; Tigabu, M.; Stener, L.-G.; Oden, P.C. Feasibility of visible plus near infrared spectroscopy for non-destructive verification of European x Japanese larch hybrid seeds. New For. 2016, 47, 271–285. [Google Scholar] [CrossRef]
- Ambrose, A.; Lohumi, S.; Lee, W.-H.; Cho, B.K. Comparative nondestructive measurement of corn seed viability using Fourier transform near-infrared (FT-NIR) and Raman spectroscopy. Sens. Actuators B Chem. 2016, 224, 500–506. [Google Scholar] [CrossRef]
- Dumont, J.; Hirvonen, T.; Heikkinen, V.; Mistretta, M.; Granlund, L.; Himanen, K.; Fauch, L.; Porali, I.; Hiltunen, J.; Keski-Saari, S.; et al. Thermal and hyperspectral imaging for Norway spruce (Picea abies) seeds screening. Comput. Electron. Agric. 2015, 116, 118–124. [Google Scholar] [CrossRef]
- Farhadi, M.; Tigabu, M.; Odén, P. Near Infrared Spectroscopy as non-destructive method for sorting viable, petrified and empty seeds of Larix sibirica. Silva Fenn. 2015, 49, 1–12. [Google Scholar] [CrossRef]
- Novikov, A.I.; Saushkin, V.V. Infrared range spectroscopy: The study of the pine seed coat parameters. For. Eng. J. 2018, 8, 30–37. [Google Scholar]
- Novikov, A.I. Visible wave spectrometric features of scots pine seeds: The basis for designing a rapid analyzer. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012064. [Google Scholar] [CrossRef]
- Przybyło, J.; Jabłoński, M. Using Deep Convolutional Neural Network for oak acorn viability recognition based on color images of their sections. Comput. Electron. Agric. 2019, 156, 490–499. [Google Scholar] [CrossRef]
- Kaliniewicz, Z.; Tylek, P. Influence of Scarification on the Germination Capacity of Acorns Harvested from Uneven-Aged Stands of Pedunculate Oak (Quercus robur L.). Forests 2018, 9, 100. [Google Scholar] [CrossRef]
- Ivetić, V. Handbook on Seed Production, Seedling Production and Afforestation [on Serbian]; University of Belgrade, Faculty of Forestry: Belgrade, Serbia, 2013. [Google Scholar]
- Ivetić, V.; Novikov, A.I. The role of forest reproductive material quality in forest restoration. For. Eng. J. 2019, 9, 56–65. [Google Scholar]
- Grossnickle, S.C.; Ivetić, V. Direct Seeding in Reforestation–A Field Performance Review. Reforesta 2017, 4, 94–142. [Google Scholar] [CrossRef]
- Novikov, A.I.; Ersson, B.T. Aerial seeding of forests in Russia: A selected literature analysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012051. [Google Scholar] [CrossRef]
- Ivetić, V.; Devetaković, J.; Nonić, M.; Stanković, D.; Šijačić-Nikolić, M. Genetic diversity and forest reproductive material from seed source selection to planting. iForest Biogeosci. For. 2016, 9, 801–812. [Google Scholar] [CrossRef]
- Tigabu, M.; Daneshvar, A.; Jingjing, R.; Wu, P.; Ma, X.; Odén, P.C. Multivariate Discriminant Analysis of Single Seed Near Infrared Spectra for Sorting Dead-Filled and Viable Seeds of Three Pine Species: Does One Model Fit All Species? Forests 2019, 10, 469. [Google Scholar] [CrossRef]
- Novikov, A.I.; Ivetić, V. The effect of seed coat color grading on height of one-year-old container-grown Scots pine seedlings planted on post-fire site. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012043. [Google Scholar] [CrossRef]
- Novikov, A.I.; Ivetić, V. The effect of seed size grading on seed use efficiency and height of one-year-old container-grown Scots pine (Pinus sylvestris L.) seedlings. Reforesta 2018, 6, 100–109. [Google Scholar] [CrossRef]
- Yi, C.W.; Li, W.X. Study on Automatic Control Method of Seeds Grading Device. Trans. Chin. Soc. Agric. Mach. 2005, 8, 15–23. [Google Scholar]
- Clohessy, J.W.; Pauli, D.; Kreher, K.M.; Buckler, V.; Edward, S.; Armstrong, P.R.; Wu, T.; Hoekenga, O.A.; Jannink, J.-L.; Sorrells, M.E.; et al. A Low-Cost Automated System for High-Throughput Phenotyping of Single Oat Seeds. Plant Phenome J. 2018, 1. [Google Scholar] [CrossRef]
- Affleck, S.; Affleck, L. Apparatus for Sorting Seeds According to Color. U.S. Patent 4,946,046, 7 August 1990. [Google Scholar]
- Arya, S. Development of a Seed Analyzer using the Techniques of Computer Vision. Int. J. Distrib. Parallel Syst. 2012, 3, 149–155. [Google Scholar] [CrossRef]
- Zivoli, R.; Gambacorta, L.; Piemontese, L.; Solfrizzo, M. Reduction of Aflatoxins in Apricot Kernels by Electronic and Manual Color Sorting. Toxins 2016, 8, 26. [Google Scholar] [CrossRef] [PubMed]
- Sokolov, S.V.; Novikov, A.I. New optoelectronic systems for express analysis of seeds in forestry production. For. Eng. J. 2019, 9, 5–13. [Google Scholar]
- Albekov, A.U.; Drapalyuk, M.V.; Morkovina, S.S.; Vovchenko, N.G.; Novikov, A.I.; Sokolov, S.V.; Novikova, T.P. Express Analyzer of Seed Quality. Russian Patent 2,675,056, 14 December 2018. [Google Scholar]
- Albekov, A.U.; Drapalyuk, M.V.; Morkovina, S.S.; Vovchenko, N.G.; Novikov, A.I.; Sokolov, S.V.; Novikova, T.P. Device for Seeds Sorting. Russian Patent 2,682,854, 21 March 2019. [Google Scholar]
- Kucherenko, P.A.; Sokolov, S.V. Solution of the problem of identifying structures of discrete stochastic objects based on the minimum posterior error criterion of distribution densities. Autom. Control Comput. Sci. 2016, 50, 28–36. [Google Scholar] [CrossRef]
- Balascio, C.C.; Misra, M.K.; Johnson, H.P. Stochastic modeling of granular flow in seed sorting. Math. Comput. Model. 1988, 11, 523–527. [Google Scholar] [CrossRef] [Green Version]
- Novikov, A.I. Disc Separators in Forest Seed Production [in Russian Diskovye separatory Semyan v Lesohozyajstvennom Proizvodstve]; VSUFT: Voronezh, Russia, 2017. [Google Scholar]
- Xing, H.; Wang, Z.; Luo, X.; Zang, Y.; Yang, W.; Zhang, M.; Ma, Y. Design of an active seed throwing and cleaning unit for pneumatic rice seed metering device. Int. J. Agric. Biol. Eng. 2018, 11, 62–69. [Google Scholar] [CrossRef]
- Albekov, A.U.; Drapalyuk, M.V.; Morkovina, S.S.; Novikov, A.I.; Vovchenko, N.G.; Sokolov, S.V.; Novikova, T.P. Seed Sorting Device. Russian Patent 2,687,509, 14 May 2019. [Google Scholar]
- Drapalyuk, M.V.; Novikov, A.I. Device for sorting forest seeds on quality basis. Curr. Res. Areas XXI Century Theory Pract. 2018, 6, 145–149. (In Russian) [Google Scholar]
- Liu, J. Lecture Notes on Theoretical Mechanics; Springer: Singapore, 2019; ISBN 978-981-13-8034-1. [Google Scholar]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Novikov, A.; Drapalyuk, M.; Dornyak, O.; Zelikov, V.; Ivetić, V. The Effect of Motion Time of a Scots Pine Single Seed on Mobile Optoelectronic Grader Efficiency: A Mathematical Patterning. Inventions 2019, 4, 55. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions4040055
Novikov A, Drapalyuk M, Dornyak O, Zelikov V, Ivetić V. The Effect of Motion Time of a Scots Pine Single Seed on Mobile Optoelectronic Grader Efficiency: A Mathematical Patterning. Inventions. 2019; 4(4):55. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions4040055
Chicago/Turabian StyleNovikov, Arthur, Michael Drapalyuk, Olga Dornyak, Vladimir Zelikov, and Vladan Ivetić. 2019. "The Effect of Motion Time of a Scots Pine Single Seed on Mobile Optoelectronic Grader Efficiency: A Mathematical Patterning" Inventions 4, no. 4: 55. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions4040055