Biomimetics and Composite Materials toward Efficient Mobility: A Review

 , , and
, , and
Abstract
:1. Introduction
1.1. Biomimicry
1.2. Composite Materials
1.3. Potential of the Automotive Industry for Application of Bio-Inspired Composite Parts
2. Biomimicry in Composites
2.1. Manufacturing Challenges
2.2. Applications with Synthetic Composites
3. Biomimicry in Mobility
3.1. Terrestrial Vehicles
3.2. Marine Vehicles
3.3. Aerospace Vehicles
3.4. Heavy Vehicles
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References and Note
- Benyus, J.M. Biomimicry: Innovation Inspired by Nature, 1st ed.; Harper Perennia: New York, NY, USA, 2002. [Google Scholar]
- Begon, M.; Townsend, C.R.; Harper, J.L. Ecology: From Individuals to Ecosystems, 4th ed.; Wiley-Blackwell: Hoboken, NJ, USA, 2005. [Google Scholar]
- Zhang, S. Fabrication of novel biomaterials through molecular self-assembly. Nat. Biotechnol. 2003, 21, 1171–1178. [Google Scholar] [CrossRef] [PubMed]
- Pandremenos, J.; Vasiliadis, E.; Chryssolouris, G. Design architectures in biology. In Proceedings of the Forty-Fifth CIRP Conference on Manufacturing Systems, Athens, Greece, 16–18 May 2012; Chryssolouris, G., Mourtzis, D., Eds.; Elsevier B.V.: Amsterdam, The Netherlands, 2012; pp. 448–452. [Google Scholar] [CrossRef] [Green Version]
- Harkness, J.M. An ideas man. IEEE Engng. Med. Biol. 2004, 23, 20–41. [Google Scholar] [CrossRef]
- McGregor, S.L. Transdisciplinarity and biomimicry. Transdiscip. J. Eng. Sci. 2013, 4, 57–65. [Google Scholar] [CrossRef]
- Quinn, S.; Gaughran, W. Bionics—An inspiration for intelligent manufacturing and engineering. Robot. Comput. Integr. Manuf. 2010, 26, 616–621. [Google Scholar] [CrossRef]
- Zhang, G. Biomimicry in biomedical research. Organogenesis 2012, 8, 101–102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gruber, P.; Bruckner, D.; Hellmich, C.; Schmiedmayer, H.-B.; Stachelberger, H.; Gebeshuber, I.C. Biomimetics—Materials, Structures and Processes, 1st ed.; Springer: Berlin, Germany, 2011. [Google Scholar]
- Repperger, D.W.; Phillips, C.A.; Neidhard-Doll, A.; Reynolds, D.B.; Berlin, J. Actuator design using biomimicry methods and a pneumatic muscle system. Control Eng. Pract. 2006, 14, 999–1009. [Google Scholar] [CrossRef]
- Orr, R.T. Vertebrate Biology, 1st ed.; Saunders: Philadelphia, PA, USA, 1961. [Google Scholar]
- Schmidt-Nielsen, K. Animal Physiology: Adaptation and Environment, 5th ed.; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Pinto-Coelho, R.M. Fundamentos em Ecologia, 1st ed.; Artmed: Porto Alegre, Brazil, 2000. [Google Scholar]
- Taiz, L.; Zeiger, E.; Møller, I.M.; Murphy, A. Fisiologia e Desenvolvimento Vegetal, 6th ed.; Artmed: Porto Alegre, Brazil, 2017. [Google Scholar]
- Snell-Rood, E. Interdisciplinarity: Bring biologists into biomimetics. Nature 2016, 529, 277–278. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vincent, J.F. Biomimetic modelling. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2003, 358, 1597–1603. [Google Scholar] [CrossRef]
- Lurie-Luke, E. Product and technology innovation: What can biomimicry inspire? Biotechnol. Adv. 2014, 32, 1494–1505. [Google Scholar] [CrossRef] [PubMed]
- Shah, D.U. Characterization and Optimization of the Mechanical Performance of Plant Fiber Composites for Structural Applications. Ph.D. Thesis, The University of Nottingham, Nottingham, UK, 2013. [Google Scholar]
- Witten, E.; Mathes, V.; Sauer, M.; Kuhnel, M. Composites Market Report 2018. Frankfurt. 2018. Available online: https://www.avktv.de/files/20181115_avk_ccev_market_report_2018_final.pdf (accessed on 20 December 2020).
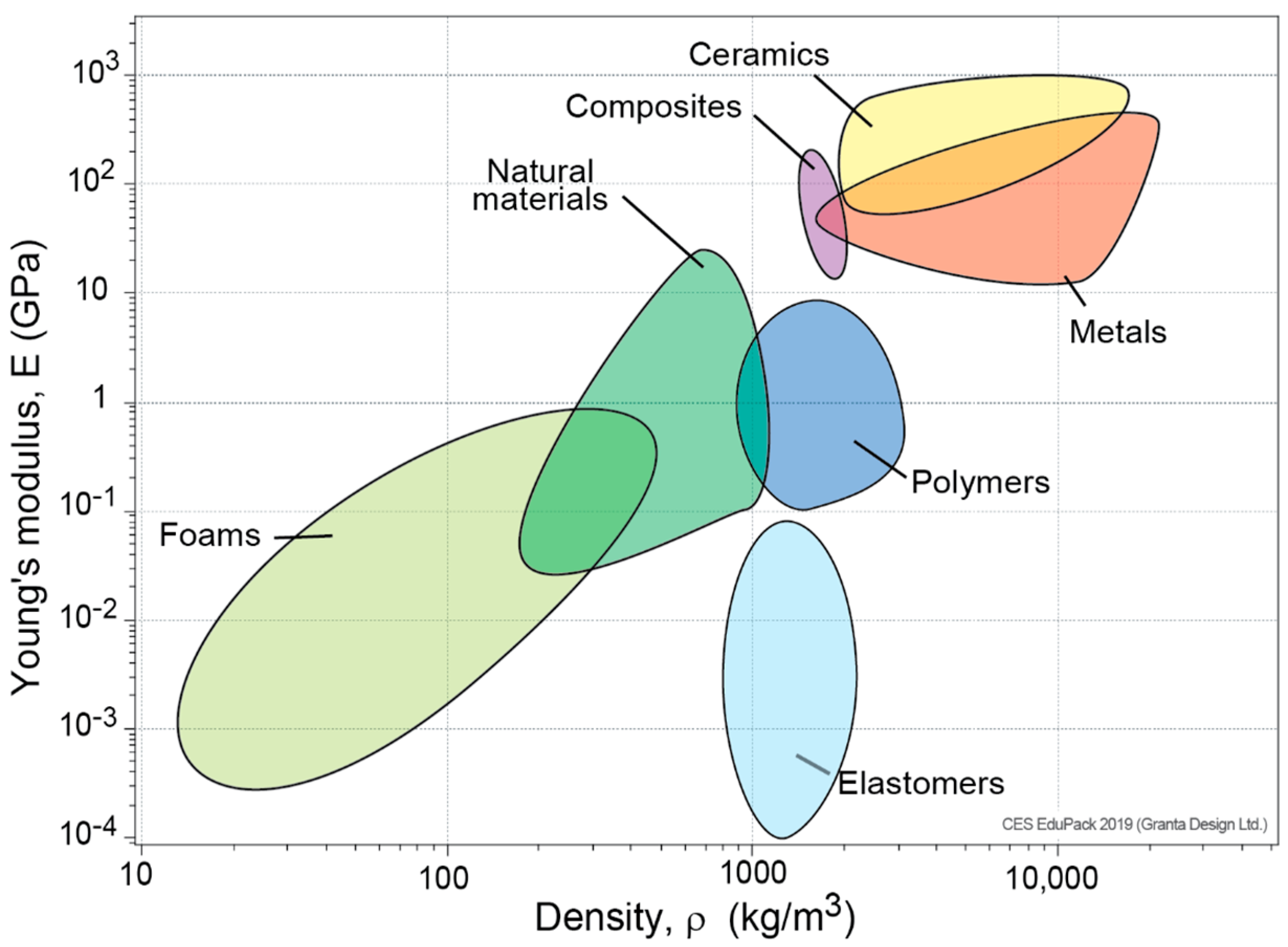
- Chart Created Using CES EduPack 2019, ANSYS Granta © 2020 Granta Design.
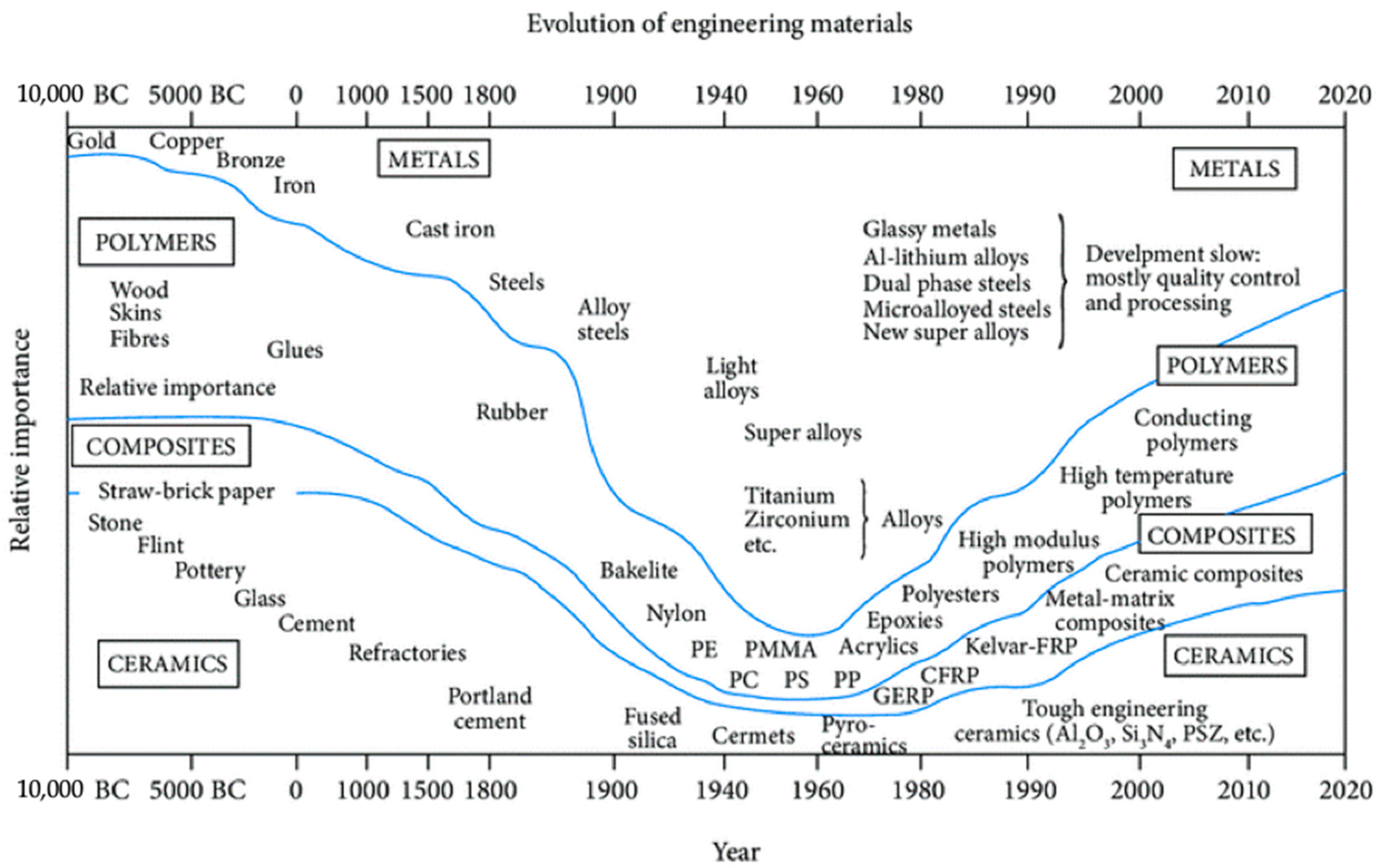
- Ashby, M.F. Technology of the 1990s: Advanced materials and predictive design [and discussion]. Philos. Trans. R. Soc. 1987, 322, 393–407. [Google Scholar] [CrossRef]
- CNT. Available online: https://pesquisarodovias.cnt.org.br/downloads/ultimaversao/gerencial.pdf (accessed on 18 December 2020).
- CNT. Available online: https://cdn.cnt.org.br/diretorioVirtualPrd/6b30accf-d38d-48c9-9a31-7d524d948c1b.pdf (accessed on 18 December 2020).
- Li, S.H.; Zeng, Q.Y.; Xiao, Y.L.; Fu, S.Y.; Zhou, B.L. Biomimicry of bamboo bast fiber with engineering composite materials. Mater. Sci. Eng. C 1995, 3, 125–130. [Google Scholar] [CrossRef]
- Svensson, E. Material Characterization of 3D-Printed Energy-Absorbent Polymers Inspired by Nature. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2017. [Google Scholar]
- Vincent, J.F.; Wegst, U.G. Design and mechanical properties of insect cuticle. Arthropod. Struct. Dev. 2004, 33, 187–199. [Google Scholar] [CrossRef] [PubMed]
- Mark, J.E.; Calvert, P.D. Biomimetic, hybrid and in situ composites. Mater. Sci. Eng. C 1994, 1, 159–173. [Google Scholar] [CrossRef]
- Calvert, P.; Broad, A. Materials synthesis utilizing biological processes. In Proceedings of the Materials Research Society Symposia Proceedings, Boston, MA, USA, 28–30 November 1989; Rieke, P.C., Calvert, P.D., Alper, M., Eds.; Materials Research Society: Pittsburgh, PA, USA, 1990; pp. 154–196. [Google Scholar]
- Fotouhi, M.; Najafabadi, M.A.M. Acoustic emission-based study to characterize the initiation of delamination in composite materials. J. Thermoplast. Compos. Mater. 2016, 29, 519–537. [Google Scholar] [CrossRef]
- Saeedifar, M.; Fotouhi, M.; Najafabadi, M.A.; Toudeshky, H.H. Prediction of quasi-static delamination onset and growth in laminated composites by acoustic emission. Compos. Part B Eng. 2016, 85, 113–122. [Google Scholar] [CrossRef]
- Curtin, W.A. Stochastic damage evolution and failure in fiber-reinforced composites. Adv. Appl. Mech. 1998, 36, 163–253. [Google Scholar] [CrossRef]
- Gay, D.; Hoa, S.V. Composite Materials: Design and Applications, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Rispler, A.R.; Tong, L.; Steven, G.P.; Wisnom, M.R. Shape optimisation of adhesive fillets. Int. J. Adhes. Adhes. 2000, 20, 221–231. [Google Scholar] [CrossRef]
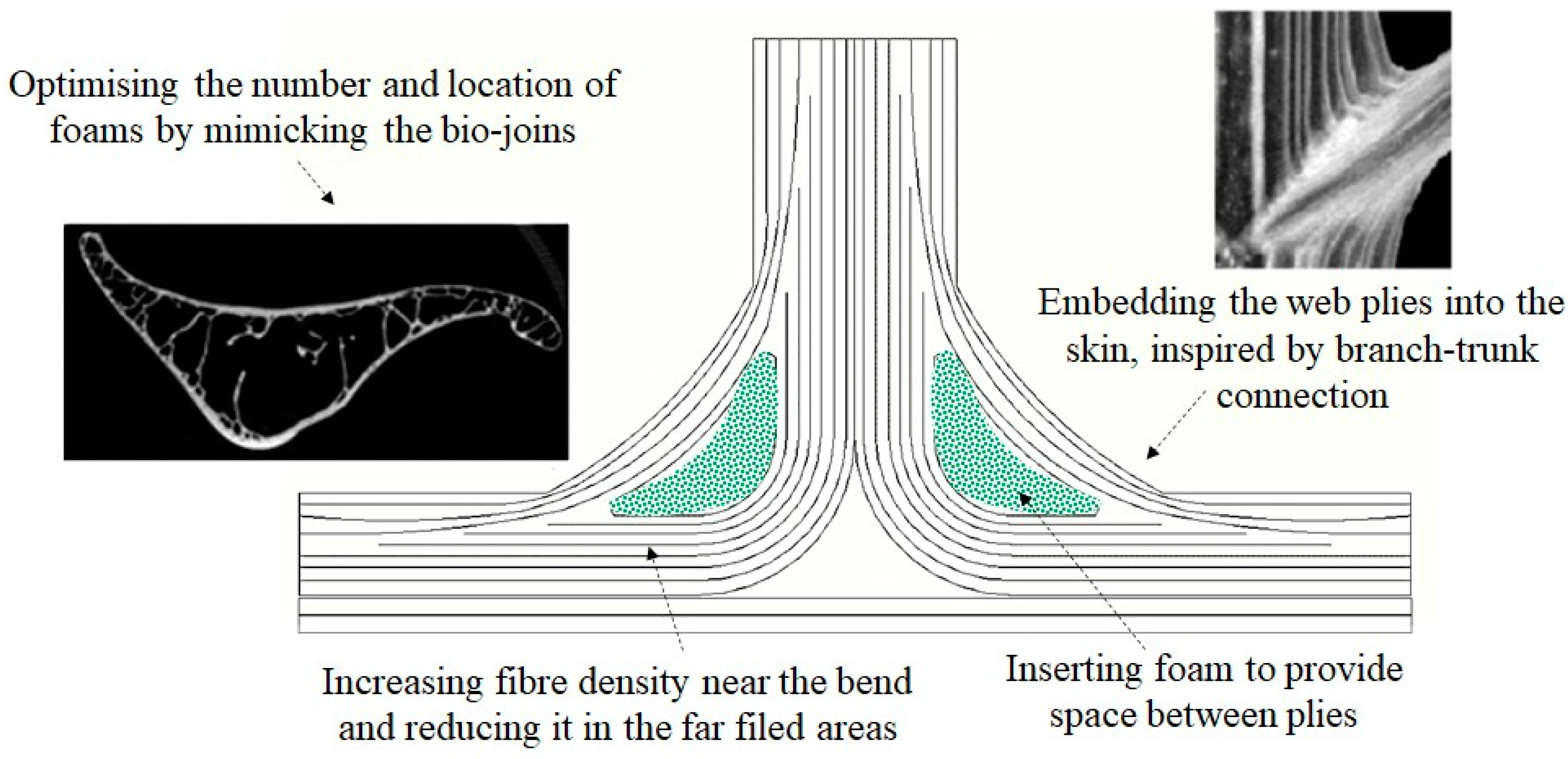
- Burns, L.A.; Feih, S.; Mouritz, A.; Pook, D. Tree joints: Biomimetic insights for aerospace composite joints. In Proceedings of the 27th International Congress of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Baldan, A. Adhesively-bonded joints in metallic alloys, polymers and composite materials: Mechanical and environmental durability performance. J. Mater. Sci. 2004, 39, 4729–4797. [Google Scholar] [CrossRef]
- Akrami, R.; Fotouhi, S.; Fotouhi, M.; Bodaghi, M.; Clamp, J.; Bolouri, A. High-performance bio-inspired composite T-joints. Compos. Sci. Technol. 2019, 184, 1–8. [Google Scholar] [CrossRef]
- Pohl, G.; Nachtigall, W. Biomimetics for Architecture & Design: Nature–Analogies–Technology, 1st ed.; Springer: New York, NY, USA, 2015. [Google Scholar]
- Mayer, G. Rigid biological systems as models for synthetic composites. Science 2005, 310, 1144–1147. [Google Scholar] [CrossRef]
- Seki, Y.; Schneider, M.S.; Meyers, M.A. Structure and mechanical behavior of a toucan beak. Acta Mater. 2005, 53, 5281–5296. [Google Scholar] [CrossRef]
- Chen, I.H.; Kiang, J.H.; Correa, V.; Lopez, M.I.; Chen, P.Y.; McKittrick, J.; Meyers, M.A. Armadillo armor: Mechanical testing and micro-structural evaluation. J. Mech. Behav. Biomed. Mater. 2011, 4, 713–722. [Google Scholar] [CrossRef]
- Fernandes, F.A.O.; de Sousa, R.A. Motorcycle helmets—A state of the art review. Accid. Anal. Prev. 2013, 56, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Gu, G.X.; Takaffoli, M.; Buehler, M.J. Hierarchically enhanced impact resistance of bioinspired composites. Adv. Mater. 2017, 29, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Grunenfelder, L.K.; Suksangpanya, N.; Salinas, C.; Milliron, G.; Yaraghi, N.; Herrera, S.; Evans-Lutterodt, K.; Nutt, S.R.; Zavattieri, P.; Kisailus, D. Bio-inspired impact-resistant composites. Acta Biomater. 2014, 10, 3997–4008. [Google Scholar] [CrossRef]
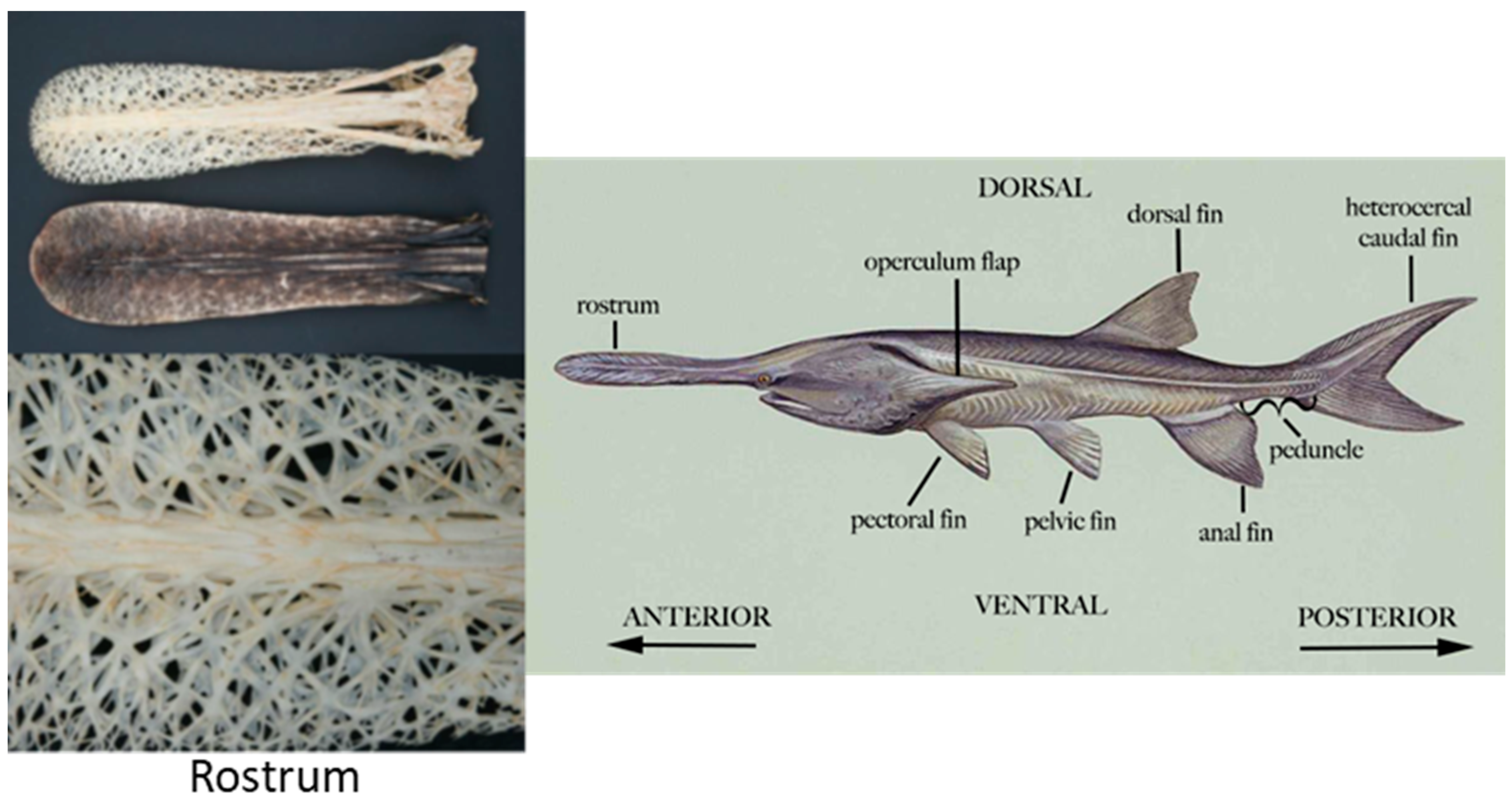
- Lower Mississippi River Conservation Committee. Available online: http://www.lmrcc.org/paddlefish-primitive-fish-inspiring-future-technology/ (accessed on 20 December 2020).
- Deang, J.F.; Suksangpanya, N.; Salinas, C.; Milliron, G.; Yaraghi, N.; Herrera, S.; Evans-Lutterodt, K.; Nutt, S.R.; Zavattieri, P.; Kisailus, D. Constitutive behaviour of paddlefish (Polyodon spathula) cartilage. Bioinspired Biomim. Nanobiomater. 2017, 6, 236–243. [Google Scholar] [CrossRef]
- Riveros, G.A.; Patel, R.R.; Hoover, J.J.; Hodo, W.; Acosta, F.J. Swimming and energy dissipation enhancement induced by the rostrum of the paddlefish (polyodon spathula): A multiphysics, fluid-structure interaction analysis. In Proceedings of the Materials Research Society Fall Meeting, Boston, MA, USA, 15 October 2014. [Google Scholar]
- Fratzl, P. Biomimetic materials research: What can we really learn from nature’s structural materials? J. R. Soc. Interface 2007, 4, 637–642. [Google Scholar] [CrossRef] [Green Version]
- Margolin, V. Design for a sustainable world. Des. Issues 1998, 14, 83–92. [Google Scholar] [CrossRef]
- Kennedy, E.; Fecheyr-Lippens, D.; Hsiung, B.-K.; Niewiarowski, P.H.; Kolodziej, M. Biomimicry: A path to sustainable innovation. Des. Issues 2015, 31, 66–73. [Google Scholar] [CrossRef]
- Bogatyrev, N.R.; Bogatyreva, O.A. TRIZ Evolution Trends in Biological and Technological Design Strategies. In Proceedings of the 19th CIRP Design Conference—Competitive Design, Cranfield, UK, 30–31 March 2009. [Google Scholar]
- Biomimicry 3.8. Available online: https://biomimicry.net/b38files/A_Biomimicry_Primer_Janine_Benyus.pdf (accessed on 20 December 2020).
- Chowdhury, H.; Islam, R.; Hussein, M.; Zaid, M.; Loganathan, B.; Alam, F. Design of an energy efficient car by biomimicry of a boxfish. Energy Procedia 2019, 160, 40–44. [Google Scholar] [CrossRef]
- Flink, J.J. The Path of Least Resistance; American Heritage of Invention & Technology: Rockville, MD, USA, 1989; pp. 34–44. [Google Scholar]
- Salgueiredo, C.F. Biomimicry and the Low Carbon Vehicle: Generation of Innovative Bio-Inspired Concepts using the C-K Theory. Ph.D. Thesis, Université Paris-Saclay, Saint-Aubin, France, 2016. [Google Scholar]
- Shyian, I.; Demchenko, O.; Companyets, A.; Chorna, A. Principles of the development of a model of a combat vehicle by means of biomimetic. Ukr. J. Educ. Stud. Inf. Technol. 2018, 6, 27–36. [Google Scholar] [CrossRef]
- Ng, S.K. A Biomimicry Approach to Automation of Road Feature Surveys. Ph.D. Thesis, University of Tasmania, Hobart, Australia, 2007. [Google Scholar]
- Fish, F.E.; Kocak, D.M. Biomimetics and marine technology: An introduction. Mar. Technol. Soc. J. 2011, 45, 8–13. [Google Scholar] [CrossRef]
- Roper, D.T.; Sharma, S.; Sutton, R.; Culverhouse, P. A review of developments towards biologically inspired propulsion systems for autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M 2011, 225, 77–96. [Google Scholar] [CrossRef]
- Siochi, E.J.; Anders, J.B.; Cox, D.E.; Jegley, D.C.; Fox, R.L.; Katzberg, S.J. Biomimetics for NASA Langley Research Center: Year 2000 Report of Findings from a Six-Month Survey, Technical Memorandum NASA TM-2002-211445; Langley Research Center, National Aeronauticas and Space Administration: Langley, VA, USA, 2002. [Google Scholar]
- Triantafyllou, M.S.; Triantafyllou, G.S. An efficient swimming machine. Sci. Am. 1995, 272, 40–48. [Google Scholar] [CrossRef]
- Barrett, D.S. The Design of a Flexible Hull Undersea Vehicle Propelled by an Oscillating Foil. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1994. [Google Scholar]
- Barrett, D.S. Propulsive Efficiency of a Flexible Hull Underwater Vehicle. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1996. [Google Scholar]
- Anderson, J.M.; Kerrebrock, P.A. The vorticity control unmanned undersea vehicle (VCUUV): An autonomous robot tuna. In Proceedings of the 10th International Symposium on Unmanned Untethered Submersible Technology, Durham, NC, USA, 10–11 September 1997; pp. 63–70. [Google Scholar]
- Hirata, K.; Takimoto, T.; Tamura, K. Study on turning performance of a fish robot. In Proceedings of the First International Symposium on Aqua Bio-Mechanisms, Hiratsuka, Japan, 27–30 August 2000; pp. 287–292. [Google Scholar]
- Dogangil, G.; Ozcicek, E.; Kuzucu, A. Design, construction, and control of a robotic dolphin. In Proceedings of the International Conference on Robotics and Biomimetics, Sha Tin, Hong Kong, 5–9 July 2005; pp. 51–56. [Google Scholar]
- Liu, J. Modelling and Online Optimisation of Robotic Fish Behaviours. Ph.D. Thesis, University of Essex, Colchester, UK, 2007. [Google Scholar]
- Hu, H. Biologically inspired design of autonomous robotic fish at Essex. In Proceedings of the Fifth IEEE UK and RI Chapter Conference on Advances in Cybernetic Systems (AICS2006), Sheffield, UK, 7–8 September 2006; pp. 3–8. [Google Scholar]
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Galantai, V.P.; Sofla, A.Y.N.; Meguid, S.A.; Tan, K.T.; Yeo, W.K. Bio-inspired wing morphing for unmanned aerial vehicles using intelligent materials. Int. J. Mech. Mater. Des. 2012, 8, 71–79. [Google Scholar] [CrossRef]
- Rashidi, M.R.W.; Frank, G.; Seifert, R.; Chapkin, W.; Baur, J.; Walgren, P. Biomimicry of the armadillo carapace for the design of bending cylinders for aerospace applications. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Pohly, J.A.; Kang, C.K.; Sridhar, M.; Landrum, D.B.; Fahimi, F.; Mesmer, B.; Bluman, J.E.; Aono, H.; Lee, T. Scaling bioinspired mars flight vehicles for hover. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
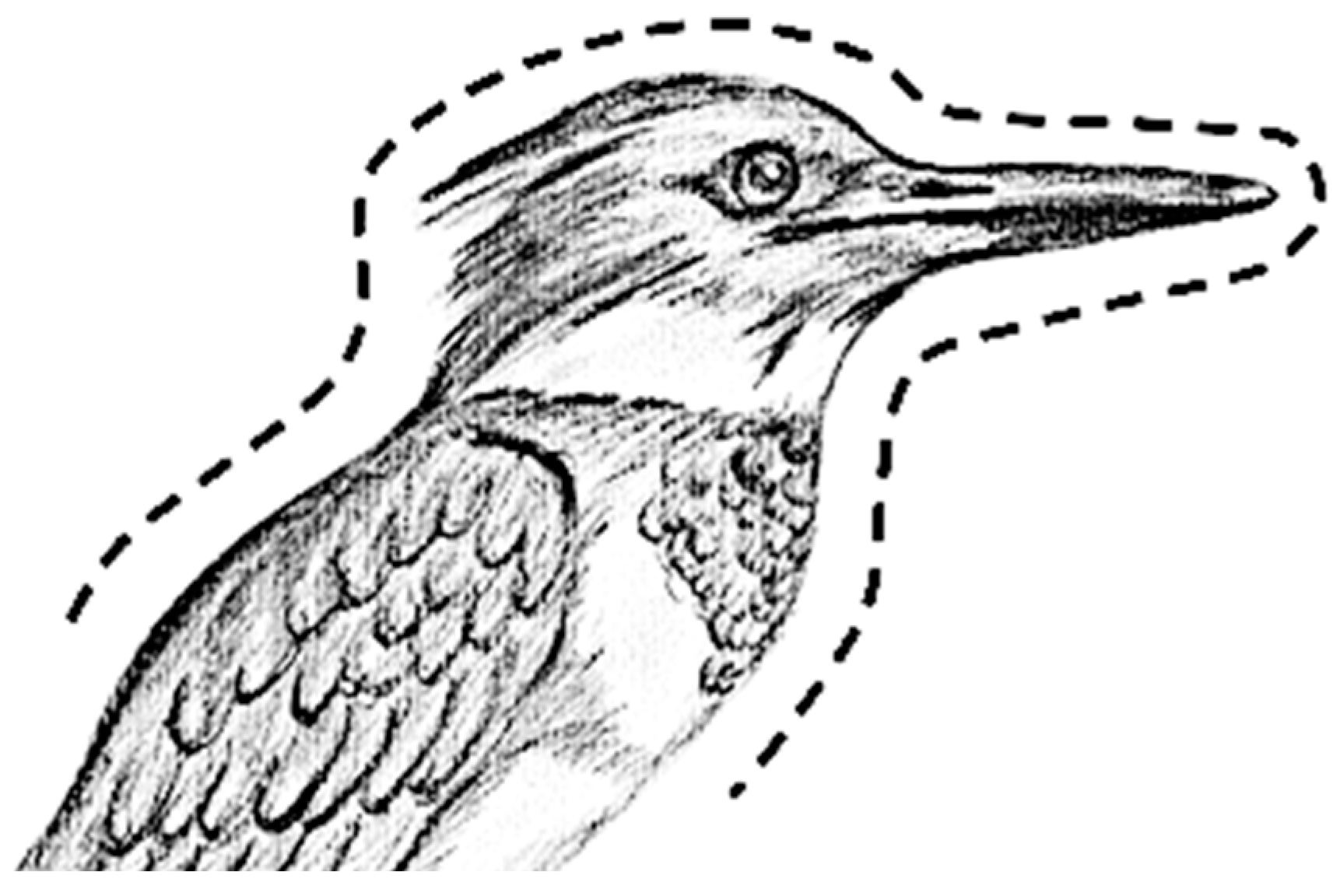
- EarthSky. Available online: https://earthsky.org/earth/sunni-robertson-on-how-a-kingfisher-inspired-a-bullet-train (accessed on 19 January 2020).
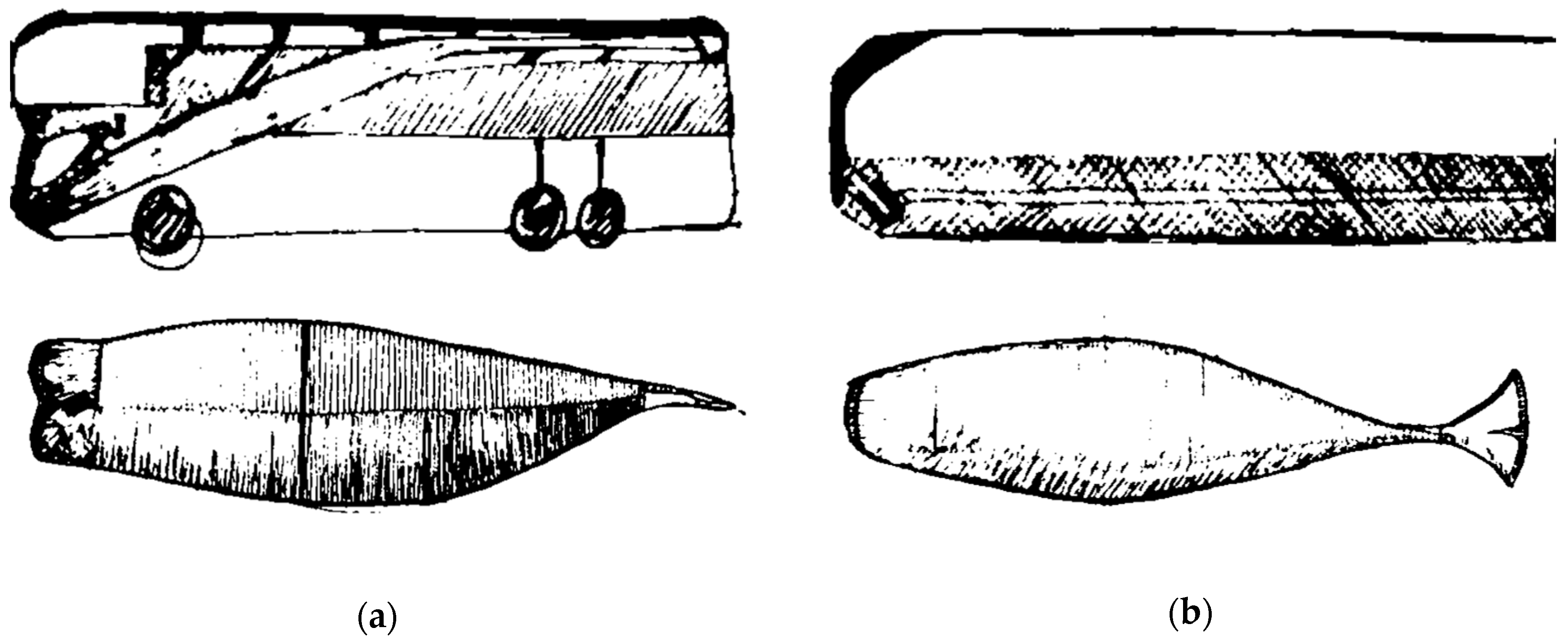
- Arabacı, S.K.; Pakdemirli, M. Aerodynamically efficient bus design inspired by beluga whales. In Proceedings of the 11th International Conference on Heat Transfer, Fluid Mechanics and Thermodynamics, Skukuza, South Africa, 20–23 July 2015. [Google Scholar]
- Arabacı, S.K.; Arabacı, M. Aerodynamic characteristics of buses inspired by beluga whales in CFD and wind tunnel. In Proceedings of the 9th International Automotive Technologies Congress, Bursa, Turkey, 7–8 May 2018. [Google Scholar]
- Goodyear. Available online: https://news.goodyear.eu/goodyear-unveils-eagle-360-a-visionary-tire-concept-for-future-autonomous-vehicles/ (accessed on 19 January 2020).
- Castro, P.; Huber, M.E. Marine Biology, 2nd ed.; William C Brown Pub: Dubuque, IA, USA, 1997. [Google Scholar]
- Almaraz, I.P. New Dynamic Pallet for Volvo Trucks Based in Biomimicry: New Support Modular and Adaptable to Different Geometries, Based in the Structures of the Radiolarian Microorganisms and Honeycomb. Bachelor’s Thesis, University of Skövde, Skövde, Sweden, 2019. [Google Scholar]
- Futuristic News. Available online: http://futuristicnews.com/volvo-ant-biomimicry-to-improve-long-haul-transportation/ (accessed on 19 January 2020).
- Vaaju. Available online: https://vaaju.com/russiaeng/isuzu-announced-a-truck-with-biodesign-photo/ (accessed on 19 January 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boaretto, J.; Fotouhi, M.; Tende, E.; Aver, G.F.; Marcon, V.R.R.; Cordeiro, G.L.; Bergmann, C.P.; Vannucchi de Camargo, F. Biomimetics and Composite Materials toward Efficient Mobility: A Review. J. Compos. Sci. 2021, 5, 22. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs5010022
Boaretto J, Fotouhi M, Tende E, Aver GF, Marcon VRR, Cordeiro GL, Bergmann CP, Vannucchi de Camargo F. Biomimetics and Composite Materials toward Efficient Mobility: A Review. Journal of Composites Science. 2021; 5(1):22. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs5010022
Chicago/Turabian StyleBoaretto, Joel, Mohammad Fotouhi, Eduardo Tende, Gustavo Francisco Aver, Victoria Rafaela Ritzel Marcon, Guilherme Luís Cordeiro, Carlos Pérez Bergmann, and Felipe Vannucchi de Camargo. 2021. "Biomimetics and Composite Materials toward Efficient Mobility: A Review" Journal of Composites Science 5, no. 1: 22. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs5010022