
Date-Driven Tracking Control via Fuzzy-State Observer for AUV under Uncertain Disturbance and Time-Delay

Abstract
:1. Introduction
- A novel tracking controller was proposed via improved model-free adaptive predictive control (MFAPC) for AUV horizontal sailing. The dynamic linearization method and predictive control concept were utilized to design an MFAPC controller. We utilized the dynamic linearization method and predictive control concept to design an MFAPC controller. Combining the MFAPC approach with the fuzzy state observer (FSO), we realized accurate tacking control under system time-delay and external disturbance simultaneously.
- To handle the uncertain time-delay problem in systems, a T-S fuzzy model-based state FSO was designed to attenuate the impact of time-delay. We combined the FSO with MFAPC approach for the first time. Based on this, the proposed novel control scheme can process the disturbance and time-delay simultaneously.
- The dynamic linearization method of proposed MFAPC controller is designed able to robustly process the MIMO nonlinear discrete time system, which conforms to the practical characteristics of the AUV motion system. The current researches on the theory of the data-driven based MFAC are most focused on the single input and single output (SISO) systems.
- The practicality and feasibility of the proposed control scheme for the AUV heading tracking control were validated using MATLAB/Simulink simulation tests.
2. Fundamentals
2.1. Mathematical Model of AUV
2.2. Discrete-Time Data Model
2.3. T-S Fuzzy Logic System
3. Control Design and Stability Analysis
3.1. Syetem Dynamic Linearization and Transformation
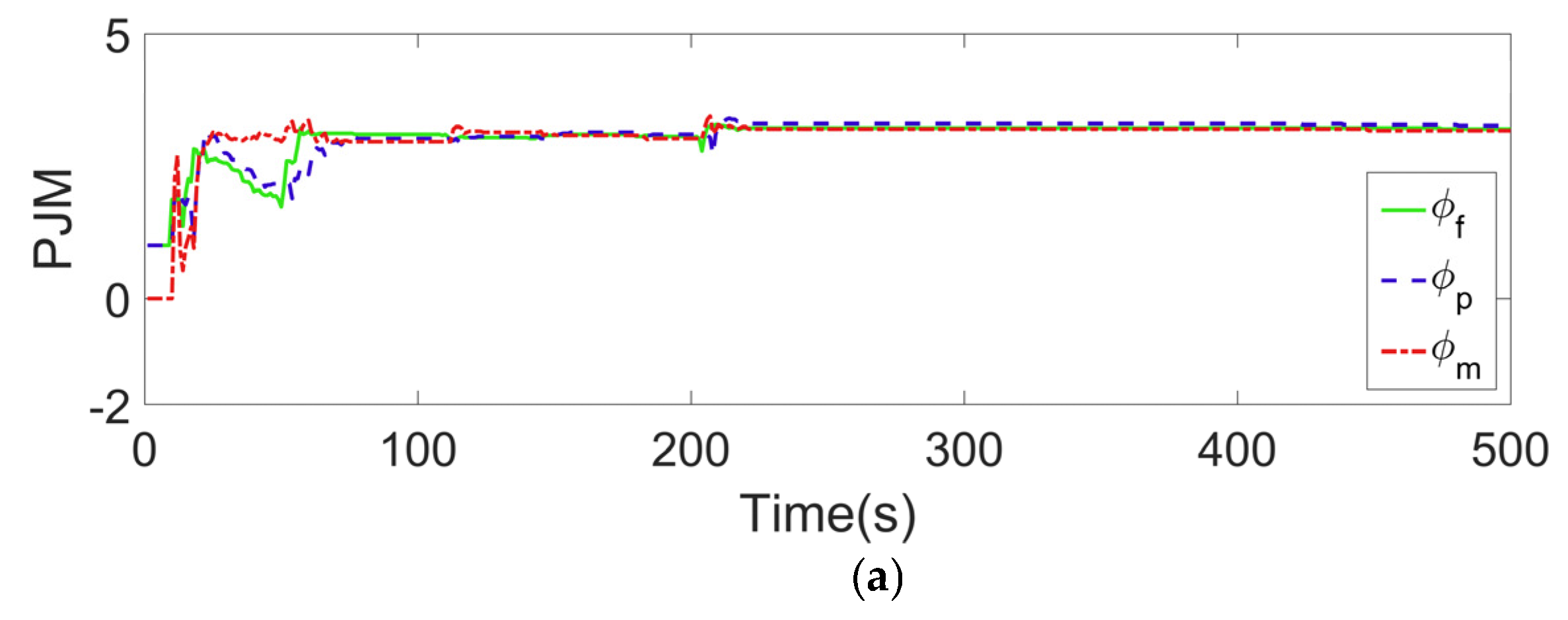
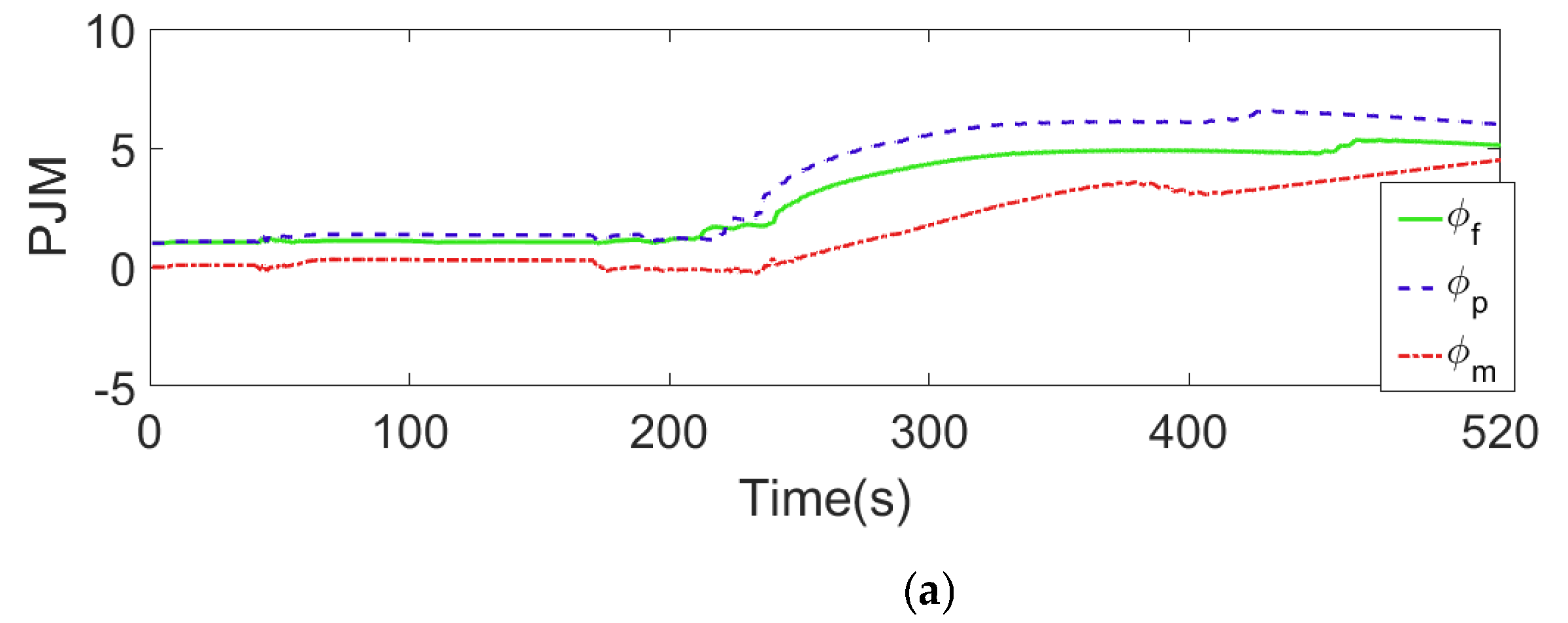
3.2. PJM Esitimation and Prediction
3.3. MFAPC Scheme Design and Stability Analysis
3.4. Fuzzy State Observer and Stability Analysis
4. Simulation Validation
4.1. Parameter Selection
- Rule1: If is (max)
- Then
- Rule2: If is (min)
- Then
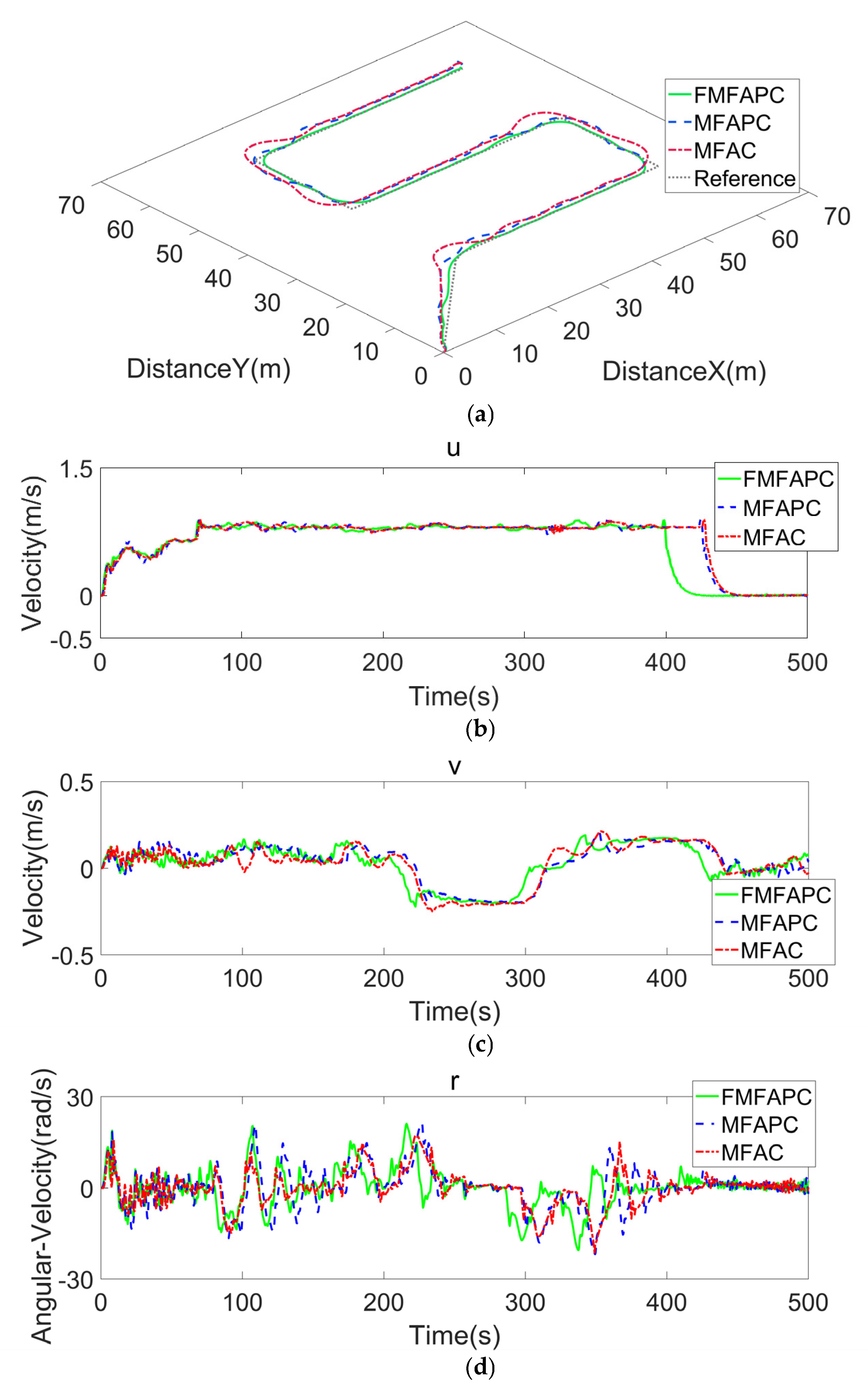
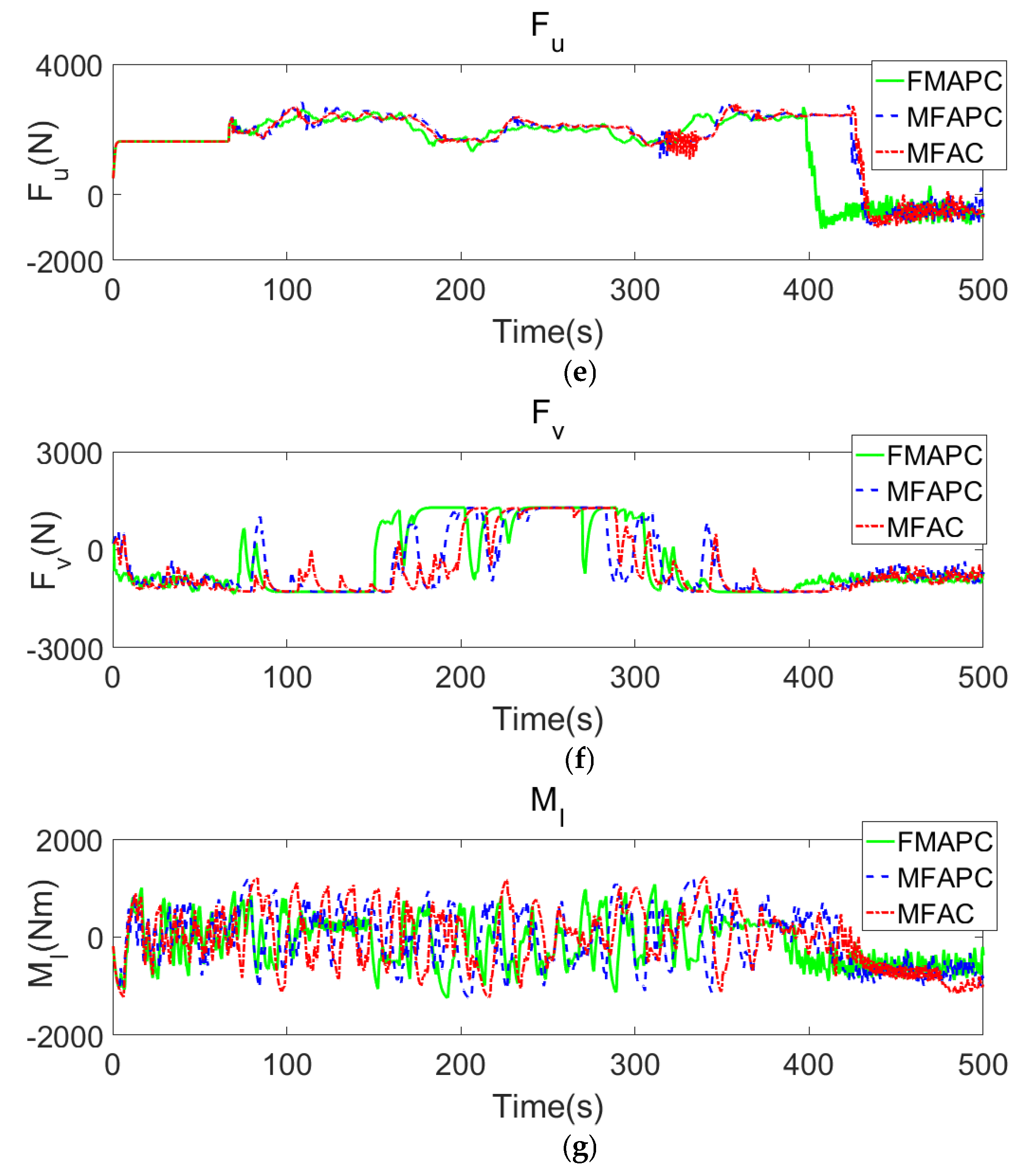
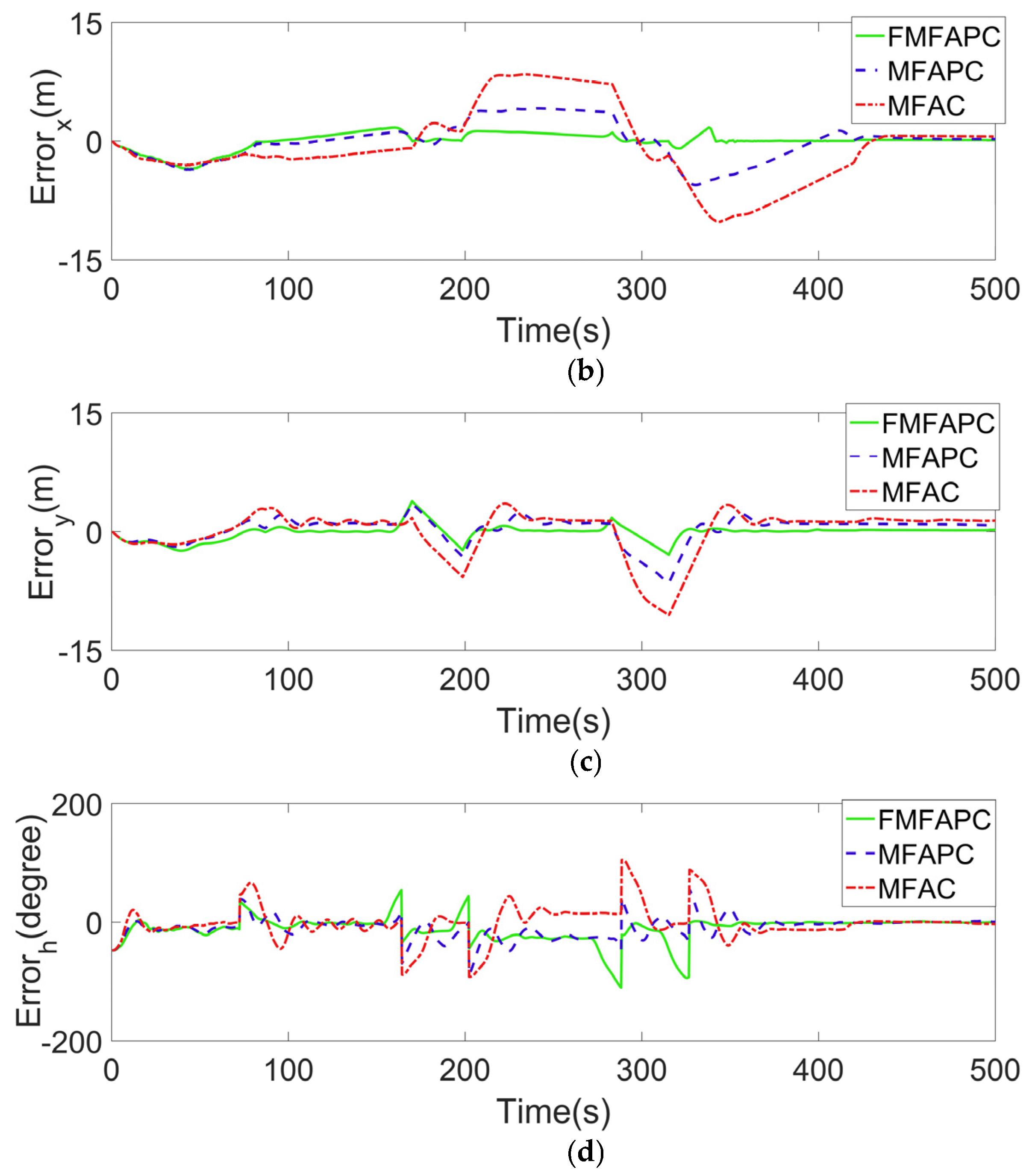
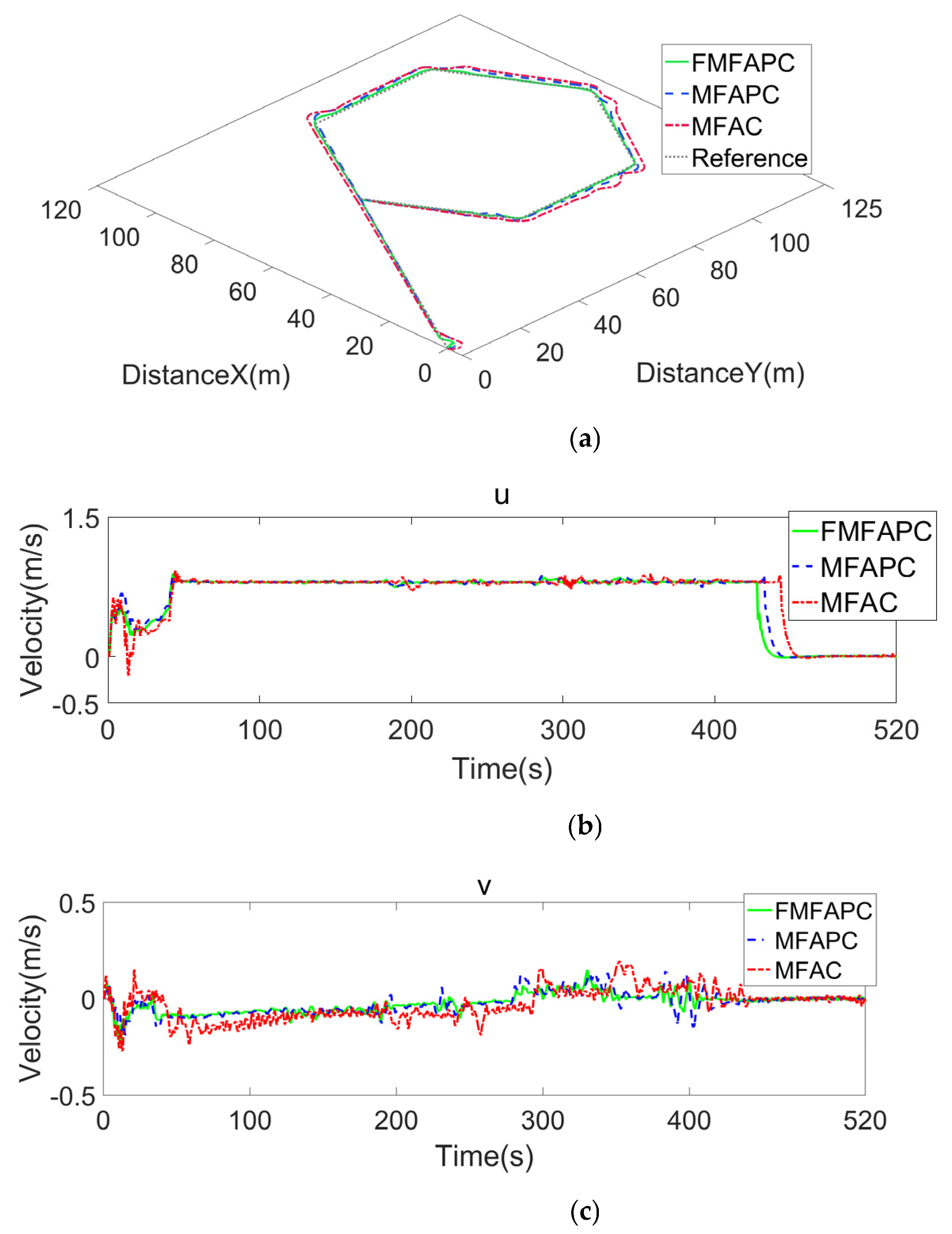
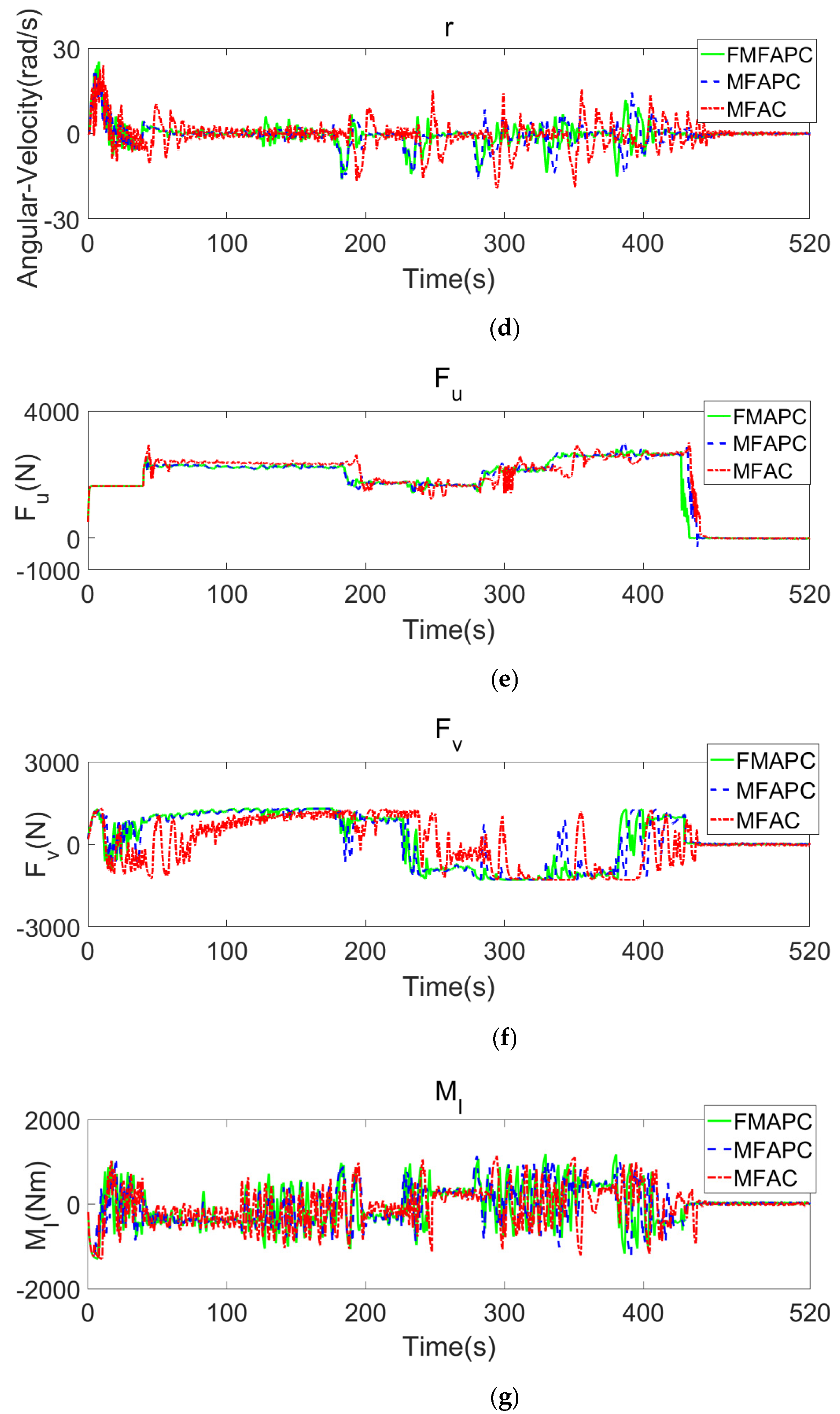
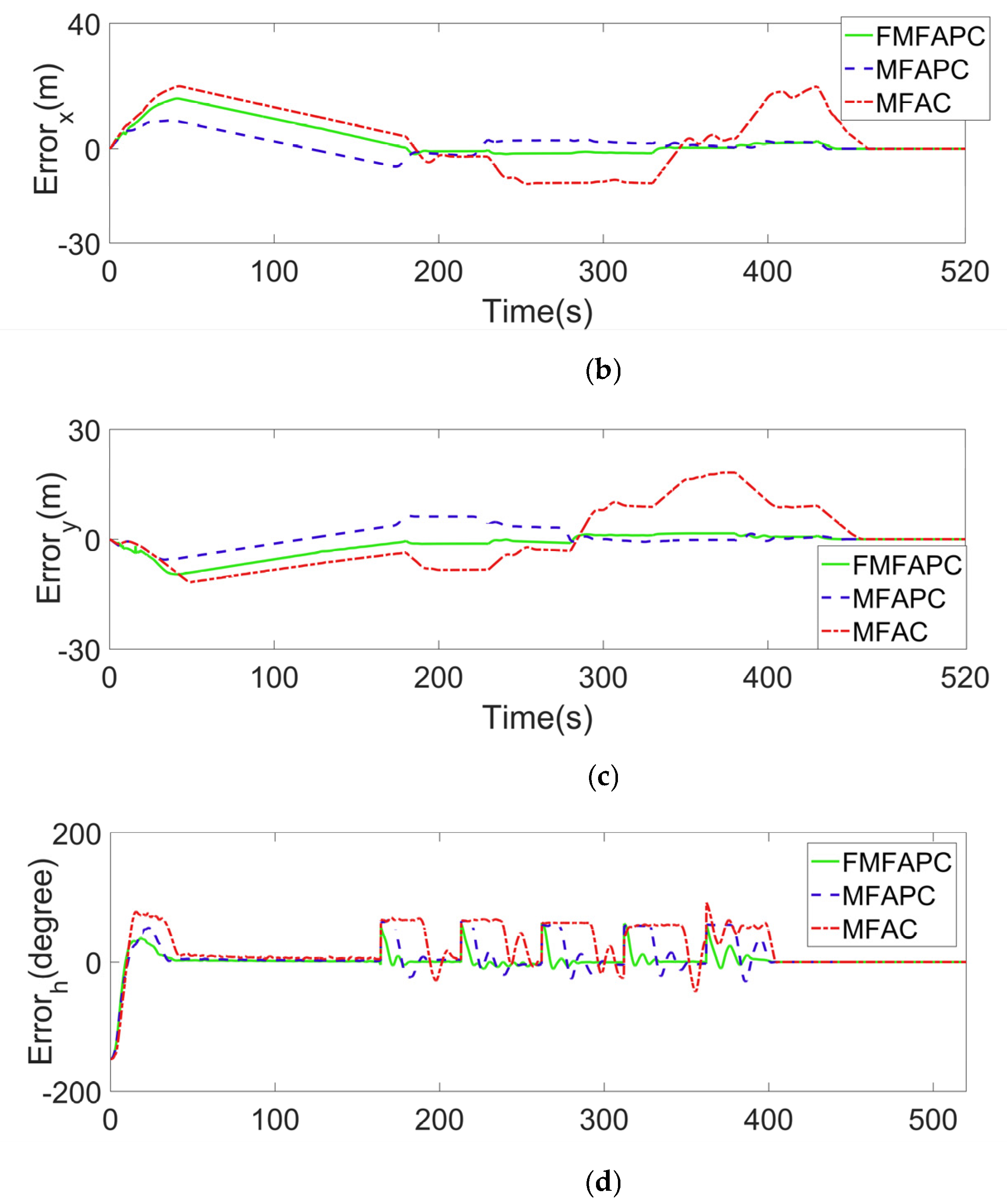
4.2. Tracking Simulation Results
4.2.1. Scenario 1
4.2.2. Scenario 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV homing and docking for remote operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. A review of the path planning and formation control for multiple autonomous underwater vehicles. J. Intell. Robot. Syst. 2021, 101, 67. [Google Scholar] [CrossRef]
- Kamaev, A.N.; Sukhenko, V.A.; Karmanov, D.A. Constructing and visualizing three-dimensional sea bottom models to test AUV machine vision systems. Program. Comput. Softw. 2017, 43, 184–195. [Google Scholar] [CrossRef]
- Tonacci, A.; Lacava, G.; Lippa, M.A.; Lupi, L.; Cocco, M.; Domenici, C. Electronic nose and AUV: A novel perspective in marine pollution monitoring. Mar. Technol. Soc. J. 2015, 49, 18–24. [Google Scholar] [CrossRef]
- Cao, X.; Sun, H.; Guo, L. Potential field hierarchical reinforcement learning approach for target search by multi-AUV in 3-D underwater environments. Int. J. Control. 2020, 93, 1677–1683. [Google Scholar] [CrossRef]
- Gan, W.; Zhu, D.; Xu, W.; Sun, B. Survey of trajectory tracking control of autonomous underwater vehicles. J. Mar. Sci. Technol. 2017, 25, 722–731. [Google Scholar]
- Lu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-based los guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of under actuated autonomous underwater vehicles. Ocean. Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Cho, G.R.; Li, J.H.; Park, D.; Jung, J.H. Robust trajectory tracking of autonomous underwater vehicles using back-stepping control and time delay estimation. Ocean. Eng. 2020, 201, 107131. [Google Scholar] [CrossRef]
- Avila, J.P.; Donha, D.C.; Adamowski, J.C. Experimental model identification of open-frame underwater vehicles. Ocean. Eng. 2013, 60, 81–94. [Google Scholar]
- Caccia, M.; Indiveri, G.; Veruggio, G. Modeling and identifification of open-frame variable confifiguration unmanned underwater vehicles. Ocean. Eng. 2000, 25, 227–240. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control. Syst. Technol. 2010, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Trans. Neural Networks 2011, 22, 2173–2188. [Google Scholar]
- Hou, Z.S.; Wang, Z. From model-based control to data-driven control: Survey, classification and perspective. Inf. Sci. 2013, 235, 3–35. [Google Scholar] [CrossRef]
- Liao, Y.; Du, T.; Jiang, Q. Model-free adaptive control method with variable forgetting factor for unmanned surface vehicle control. Appl. Ocean. Res. 2019, 93, 101945. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, X.; Zhang, L. Heading tracking of 6WID/4WIS unmanned ground vehicles with variable wheelbase based on model free adaptive control. Mech. Syst. Signal Process. 2021, 159, 107715. [Google Scholar] [CrossRef]
- Gao, H.; Ma, G.; Lv, Y.; Guo, Y. Forecasting-based data-driven model-free adaptive sliding mode attitude control of combined spacecraft. Aerosp. Sci. Technol. 2019, 86, 364–374. [Google Scholar] [CrossRef]
- Hou, Z.; Chi, R.; Gao, H. An overview of dynamic-linearization-based data-driven control and applications. IEEE Trans. Ind. Electron. 2016, 64, 4076–4090. [Google Scholar] [CrossRef]
- Hua, C.; Liu, G.; Li, L.; Guan, X. Adaptive fuzzy prescribed performance control for nonlinear switched time-delay systems with unmodeled dynamics. IEEE Trans. Fuzzy Syst. 2017, 26, 1934–1945. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Fuzzy adaptive fault-tolerant control of unknown nonlinear systems with time-varying structure. IEEE Trans. Fuzzy Syst. 2019, 27, 1904–1916. [Google Scholar] [CrossRef]
- Jiang, B.; Karimi, H.R.; Kao, Y.; Gao, C. Adaptive Control of Nonlinear Semi-Markovian Jump TS Fuzzy Systems With Immeasurable Premise Variables via Sliding Mode Observer. IEEE Trans. Cybern. 2018, 50, 810–820. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.Y.; Frank, P.M. Analysis and synthesis of nonlinear time-delay systems via fuzzy control approach. IEEE Trans. Fuzzy Syst. 2000, 8, 200–211. [Google Scholar]
- Hua, C.; Wang, Q.G.; Guan, X. Robust adaptive controller design for nonlinear time-delay systems via T–S fuzzy approach. IEEE Trans. Fuzzy Syst. 2018, 17, 901–910. [Google Scholar]
- Huang, Y.; Zhang, Y.; Pool, D.M.; Stroosma, O.; Chu, Q. Time-Delay Margin and Robustness of Incremental Nonlinear Dynamic Inversion Control. J. Guid. Control. Dyn. 2022, 45, 394–404. [Google Scholar] [CrossRef]
- Warminski, J. Nonlinear dynamics of self-, parametric, and externally excited oscillator with time delay: Van der Pol versus Rayleigh models. Nonlinear Dyn. 2020, 99, 35–56. [Google Scholar] [CrossRef]
- Liu, X.; Xiao, J.-W.; Chen, D.; Wang, Y.-W. Dynamic consensus of nonlinear time-delay multi-agent systems with input saturation: An impulsive control algorithm. Nonlinear Dyn. 2019, 97, 1699–1710. [Google Scholar] [CrossRef]
- Zare, I.; Setoodeh, P.; Asemani, M.H. TS fuzzy tracking control of nonlinear constrained time-delay systems using a reference-management approach. J. Frankl. Inst. 2021, 358, 9510–9541. [Google Scholar] [CrossRef]
- Xu, S.; Sun, G.; Sun, W. Takagi–Sugeno fuzzy model based robust dissipative control for uncertain flexible spacecraft with saturated time-delay input. ISA Trans. 2017, 66, 105–121. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Z.; Zhu, Y.; Ahn, C.K. Reachable set estimation for Takagi-Sugeno fuzzy systems against unknown output delays with application to tracking control of AUVs. ISA Trans. 2018, 78, 31–38. [Google Scholar] [CrossRef] [PubMed]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Healey, A.J.; Lienard, D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles. IEEE J. Ocean. Eng. 1993, 18, 327–339. [Google Scholar] [CrossRef] [Green Version]
- Lekkas, A.M.; Fossen, T.I. Line-of-sight guidance for path following of marine vehicles. Adv. Mar. Robot. 2013, 5, 63–92. [Google Scholar]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control. Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control. Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Weng, Y.; Gao, X. Data-driven robust output tracking control for gas collector pressure system of coke ovens. IEEE Trans. Ind. Electron. 2016, 64, 4187–4198. [Google Scholar] [CrossRef]
- Lei, T.; Hou, Z.; Ren, Y. Data-driven model free adaptive perimeter control for multi-region urban traffic networks with route choice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2894–2905. [Google Scholar] [CrossRef]
- Yang, J.; Su, J.; Li, S.; Yu, X. High-order mismatched disturbance compensation for motion control systems via a continuous dynamic sliding-mode approach. IEEE Trans. Ind. Inform. 2013, 10, 604–614. [Google Scholar] [CrossRef]
- Wang, H.O.; Tanaka, K.; Griffin, M.F. An approach to fuzzy control of nonlinear systems: Stability and design issues. IEEE Trans. Fuzzy Syst. 1996, 4, 14–23. [Google Scholar] [CrossRef]
- Peng, F.; Wang, Y.; Xuan, H.; Nguyen, T.V.T. Efficient road traffic anti-collision warning system based on fuzzy nonlinear programming. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 456–461. [Google Scholar] [CrossRef]
- Wang, L.X. Adaptive Fuzzy System and Control: Design and Stability Analysis; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]
- Gao, H.; Liu, X.; Lam, J. Stability analysis and stabilization for discrete-time fuzzy systems with time-varying delay. IEEE Trans. Syst. Man Cybern. Part B 2008, 39, 306–317. [Google Scholar]
- Yu, Q.; Hou, Z. Data-driven predictive iterative learning control for a class of multiple-input and multiple-output nonlinear systems. Trans. Inst. Meas. Control. 2016, 38, 266–281. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Model Free Adaptive Control; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Han, Z. On the identification of time-varying parameters in dynamic systems. Acta Autom. Sin. 1984, 10, 330–337. [Google Scholar]
- Hou, Z.; Jin, S. Model Free Adaptive Control: Theory and Application; Science Press: Beijing, China, 2014. [Google Scholar]
- Gershgorin, S.A. Uber die abgrenzung der eigenwerte einer matrix. Известия Рoссийскoй академии наук. Серия Математическая 1931, 6, 749–754. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear matrix inequalities in system and control theory. Soc. Ind. Appl. Math. 1994, 15, 157–193. [Google Scholar]
- Wu, C.; Dai, Y.; Shan, L.; Zhu, Z.; Wu, Z. Data-driven trajectory tracking control for autonomous underwater vehicle based on iterative extended state observer. Math. Biosci. Eng. 2022, 19, 3036–3055. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Hou, Z.; Liu, S.; Jin, S. Data-driven model-free adaptive predictive control for a class of MIMO nonlinear discrete-time systems with stability analysis. IEEE Access 2019, 7, 102852–102866. [Google Scholar] [CrossRef]
- Song, X.; Xu, S.; Shen, H. Robust H∞ control for uncertain fuzzy systems with distributed delays via output feedback controllers. Inf. Sci. 2008, 178, 4341–4356. [Google Scholar] [CrossRef]
- Strang, G. Linear Algebra and Its Applications; Thomson, Brooks/Cole: Belmont, CA, USA, 2006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameter | Values |
|---|---|
| Mass(kg) | 65 |
| Length(m) | 2.14 |
| Diameter(m) | 0.22 |
| Maximum speed(kn) | 2.5 |
| Maximum depth(m) | 60 |
| Battery life(h) | 6 |
| Performance Parameter | Values |
|---|---|
| 1 | |
| 0.8 | |
| 1 | |
| 0.56 | |
| d | 1.2 |
| Controller | STDx(m) | MADx(m) | STDy(m) | MADy(m) | STDyaw(°) | MADyaw(°) |
|---|---|---|---|---|---|---|
| FMFAPC | 19.356 | 1.094 | 20.066 | 0.556 | 24.373 | 11.225 |
| MFAPC | 19.733 | 1.791 | 20.154 | 1.449 | 25.043 | 12.613 |
| MFAC | 19.992 | 3.406 | 20.108 | 1.985 | 30.327 | 15.74 |
| Controller | STDx(m) | MADx(m) | STDy(m) | MADy(m) | STDyaw(°) | MADyaw(°) |
|---|---|---|---|---|---|---|
| FMFAPC | 26.461 | 2.850 | 31.150 | 2.213 | 45.020 | 6.242 |
| MFAPC | 26.024 | 3.133 | 31.418 | 2.520 | 45.551 | 14.403 |
| MFAC | 28.509 | 3.213 | 33.049 | 7.965 | 48.557 | 27.807 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Dai, Y.; Shan, L.; Zhu, Z. Date-Driven Tracking Control via Fuzzy-State Observer for AUV under Uncertain Disturbance and Time-Delay. J. Mar. Sci. Eng. 2023, 11, 207. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse11010207
Wu C, Dai Y, Shan L, Zhu Z. Date-Driven Tracking Control via Fuzzy-State Observer for AUV under Uncertain Disturbance and Time-Delay. Journal of Marine Science and Engineering. 2023; 11(1):207. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse11010207
Chicago/Turabian StyleWu, Chengxi, Yuewei Dai, Liang Shan, and Zhiyu Zhu. 2023. "Date-Driven Tracking Control via Fuzzy-State Observer for AUV under Uncertain Disturbance and Time-Delay" Journal of Marine Science and Engineering 11, no. 1: 207. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse11010207