V2X Communications Applied to Safety of Pedestrians and Vehicles




1
Faculty of Engineering and Architecture, Kore University of Enna, 94100 Enna, Italy
2
Department of Civil Engineering and Architecture, University of Catania, 95123 Catania, Italy
*
Author to whom correspondence should be addressed.
J. Sens. Actuator Netw. 2020, 9(1), 3; https://0-doi-org.brum.beds.ac.uk/10.3390/jsan9010003
Submission received: 5 December 2019
/
Revised: 21 December 2019
/
Accepted: 23 December 2019
/
Published: 27 December 2019
(This article belongs to the Special Issue Advances in Vehicular Networks)
Abstract
:Connected cars and vehicle-to-everything (V2X) communication scenarios are attracting more researchers. There will be numerous possibilities offered by V2X in the future. For instance, in the case of vehicles that move in a column, they could react to the braking of those in front of it through the rapid information exchanges, and most chain collisions could be avoided. V2X will be desiderated for routes optimizations, travel time reductions, and accident rate decrease in cases such as communication with infrastructures, traffic information exchanges, functioning of traffic lights, possible situations of danger, and the presence of construction sites or traffic jams. Furthermore, there could be massive conversations between smartphones and vehicles performing real-time dialogues. It is relatively reasonable to expect a connection system in which a pedestrian can report its position to all surrounding vehicles. Regarding this, it is compelling to perceive the positive effects of the driver being aware of the presence of pedestrians when vehicles are moving on the roads. This paper introduces the concepts for the development of a solution based on V2X communications aimed at vehicle and pedestrian safety. A potential system architecture for the development of a real system, concerning the safety of vehicles and pedestrians, is suggested to draft some guidelines that could be followed in new applications.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
In the last few years, a swelling phenomenon of crashes between vehicles and pedestrians [1], which has induced many injuries and even more deaths, has been witnessed [2,3]. Pedestrians, cyclists, and other non-vehicle occupants made up a considerable percentage of people killed in motor vehicle traffic crashes. Notwithstanding a constant lessening in the number of roadway fatalities, the number of pedestrian and cyclist fatalities has been nearly constant. As a consequence, these vulnerable groups have unique safety requirements and challenges that must be addressed. Thus, the protection of pedestrians, cyclists, and other non-vehicle occupants is part of the research areas regarding connected and automated vehicles [4]. In most cases, pedestrians collide with vehicles due to the distraction caused by their interactions with smartphones [5] or other Internet of things (IoT) devices [6,7,8]. This circumstance determines a decrease in the attention threshold and causes hazardous neglects during the crossing of roads [9,10,11]. Although there are some traditional mechanisms to protect pedestrians from vehicles [12], most of these are fundamentally linked to a pedestrian’s acoustic warning [13]. However, this solution is often not adequate to divert the pedestrians’ attentions from their smartphones. Pedestrian detection systems can be implemented in vehicles, in the infrastructure, or with pedestrians themselves to give warnings to drivers, pedestrians, or both. In-vehicle warning methods are becoming more and more conventional, for instance, blind-spot warning and forward collision warning. The contemporary field of vehicle-to-vehicle (V2V) communications is affording the advancement of high-level warning systems, such as intersection movement assist or left turn assist. In-vehicle warnings to the neighborhood of a pedestrian on the road might be logical. On the contrary, reasonably, the most straightforward and obvious warning system for pedestrians is a handheld device.
Fortunately, smartphones are becoming increasingly present and intelligent in people’s daily lives [14,15]. It is also true that particular applications have been developed to provide proper alarms for pedestrians by using vehicle-to-pedestrian (V2P) communications [16,17]. In this paper, the concepts for the development of an approach based on V2X communications aiming at vehicle and pedestrian safety is proposed. The primary purpose of this work is not to present a solution that has already been implemented and tested. For this reason, performance evaluation is not carried out. Instead, this article aims to introduce the fundamental notions that a potential application for driver and pedestrian safety should support. To this end, we propose a possible hardware and software architecture that could be used in vehicles and mobile devices.
In this research field, the approach suggested in ref. [18] consists of an on-board unit (OBU) system designed for vehicles, which uses the IEEE 802.11p [19] standard in agreement with Wi-Fi protocols. The IEEE 802.11p protocol is an evolution of the IEEE 802.11 family, which introduces appropriate improvements aimed at supporting intelligent transport system (ITS) applications [20,21,22,23,24]. A more detailed validation of the OBU allows the realizing of a reliable V2V and V2P communication [25,26], both concerning the package delivery speed and the average delay [27]. Besides, in the literature, several security applications have been proposed to protect the safety of vehicles and pedestrians based on data transferred from the OBU. For instance, the solution introduced in refs. [28,29] is designed for showing driving information and providing a collision warning alarm on a tablet inside the vehicle. On the contrary, the application presented in refs. [13,30] has been developed for the smartphone that is supposed to be owned by the pedestrian. In this way, vital warning information can be provided to vulnerable pedestrians distracted by the smartphone.
Different solutions have been developed, aimed at interacting with the particular action that the smartphone is playing in a precise moment, i.e., listening to music, making calls, sending text messages. Meanwhile, the privacy protection is also crucial for all participants during the data exchange processes [31,32]. Based on the precise moment, it will be possible to appropriately manipulate four specific parameters that will allow interacting in the best way with the pedestrian. In particular, these parameters are aimed at establishing:
- The screen state;
- the item state;
- the voice screen state;
- the silent state of the smartphone.
The smart tuning and management of these parameters and related applications can report accidents near road intersections, and pedestrians can receive more appropriate warnings, based on the use of their smartphone. The main contributions of the concepts introduced in this paper are:
- Design of a V2X communication system to provide interfaces for vehicle and pedestrian in safety-oriented applications;
- proposal of two applications focused on vehicle and pedestrian safety, respectively, on tablets and smartphones.
2. System Architecture
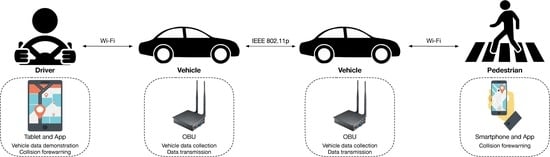
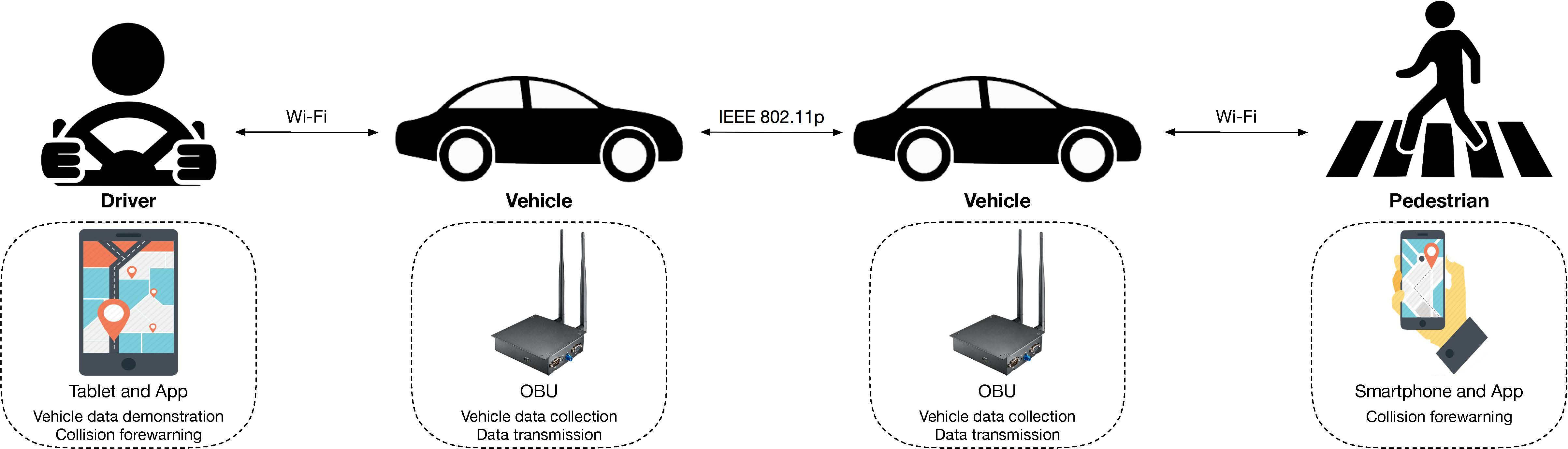
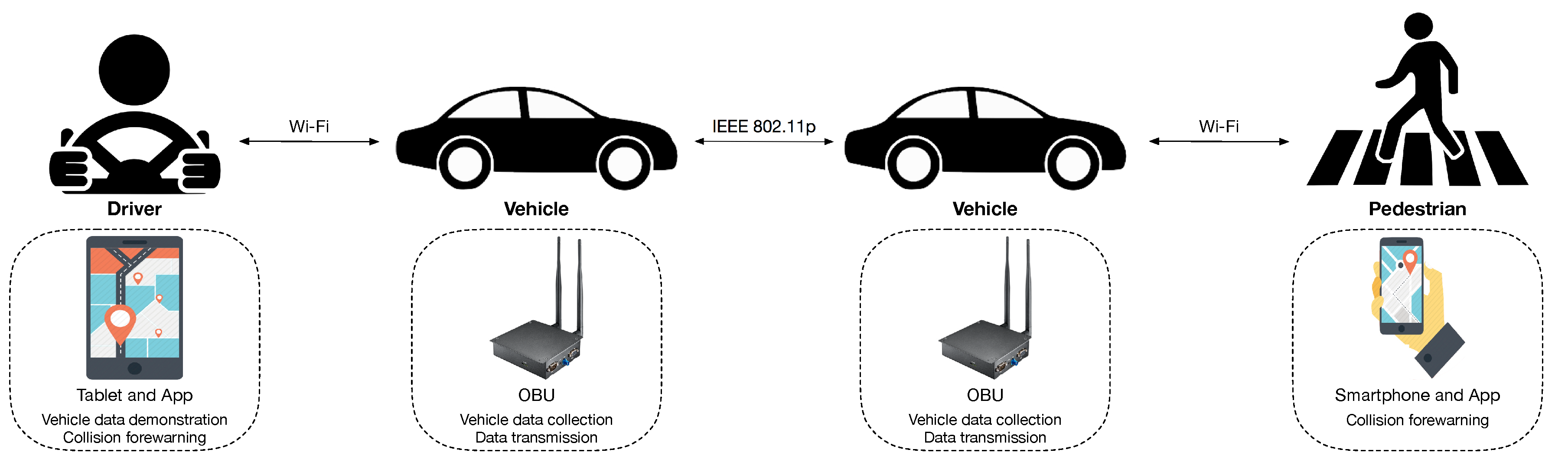
The possible hardware architecture of the system is depicted in Figure 1. It is composed of three components: The OBU installed on the vehicle, the tablet inside the vehicle, and the pedestrian’s smartphone. Modern vehicles incorporate a vast range of electronic components. Consequently, it would not be challenging to include ad hoc-created OBUs or tablets. In fact, concerning the latter, almost all cars now include touchscreen that allow various operations to be carried out, such as, for instance, interaction with the audio or infotainment system, air conditioning management and vehicle parameters, and mirroring of different operating systems for mobile devices (iOS, Apple CarPlay; Android, Android Auto). Consequently, the implementation of ad hoc applications should not involve particularly complex efforts. Regarding the OBUs, they can be composed of multiple wireless interfaces, which permit the vehicles to communicate both with other vehicles and with roadside units. Considering the proposed architecture, the OBU includes a single-board computer, DSRC wireless interface (i.e., IEEE 802.11p), Wi-Fi interface (i.e., IEEE 802.11b/g/n/ac), cellular interface, GPS (global positioning system) receiver, and antennas for each technology, for instance, the round antenna for Wi-Fi and the rectangular antenna for IEEE 802.11p. The OBU is designed for interconnecting the different subsystems. Vehicle information can be collected by connecting the on-board diagnostic (OBD) interface and GPS. Information on surrounding vehicles can be collected through the IEEE 802.11p protocol. Smartphones and tablets can communicate with the OBU via the Wi-Fi system. With the information gathered from the OBU, it is feasible to warn vehicles and pedestrians of possible and imminent collisions. Besides, the tablet can keep the driver updated with critical supporting information.
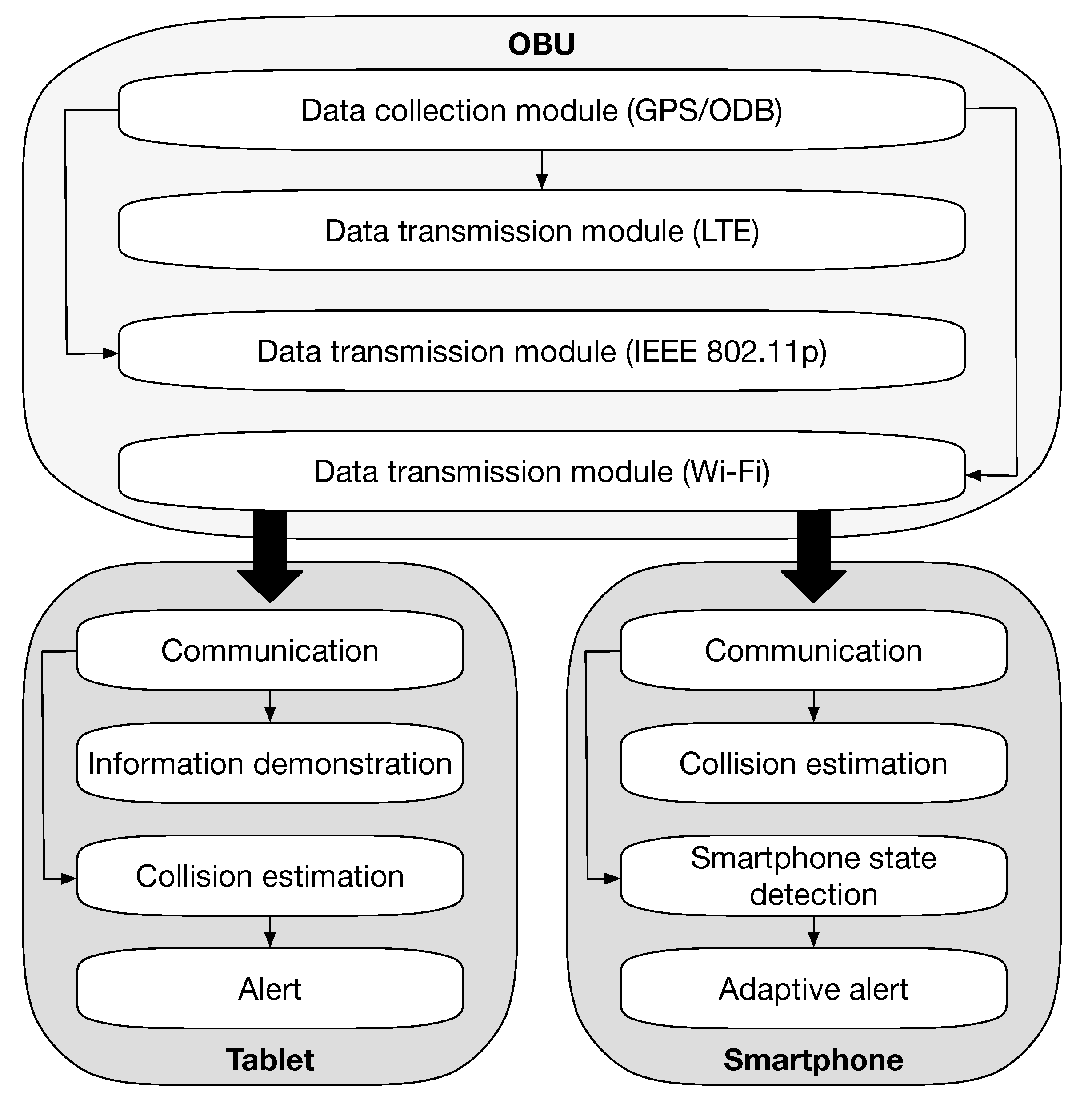
The functional software architecture, as shown in Figure 2, can be composed of three parts. Regarding the OBU, it is fundamental to focus more attention on the implementation of the dedicated short-range communications (DSRC) and the coexistence between Wi-Fi and IEEE 802.11p. As for the smartphone, the goal is to provide reliable and efficient pedestrian warnings. In this sense, the notice of a possible collision arriving in the most appropriate mode can be provided, taking into account the detection of the specific state of the smartphone. The collision warning can also be provided to the tablet that is inside the vehicle. Notwithstanding, this warning will not prevent the driver from taking advantage of additional dedicated driving assistance information.
Regarding the coexistence between Wi-Fi and IEEE 802.11p, both protocols have different MAC80211 mechanisms. In most cases, it is difficult to run the IEEE 802.11p and Wi-Fi simultaneously. For instance, IEEE 802.11p [19] defines a way to exchange data without the need to establish a basic services set (BSS), while Wi-Fi protocols must connect to the BSS and wait for the association and authentication procedures before being able to exchange data. Therefore, the problem to be solved is to make it possible for these two different protocols to share MAC80211, which is one of the leading locks in the Linux wireless subsystem [33]. A flag serves to distinguish the IEEE 802.11p and Wi-Fi protocols in the MAC80211. The wireless network adapter is examined to identify the different protocols. In particular, in the struct net-device, there is a flag called ht-supported, which is used to define if a wireless network adapter can support a particular protocol, and, based on this, the protocol it can work with is established. It is necessary to note that the V2P communication for safety systems based on Wi-Fi could have some limitations:
- The battery level of mobile devices;
- some factors can affect the data transmission quality, such as obstacles, packets lost rate, and transmission delay;
- the accuracy or precision of the positioning device could not be satisfied with the requirement of the safety system.
Several systems are in a developing and researching phase, which, in most cases, have not been employed in the real world. Although most of the systems have validated the Wi-Fi reliability, the test carried out under particular conditions cannot be on behalf of the complex conditions in the real world. It is essential to examine more in detail these systems, like the one proposed in this paper in case of real implementation, with a particular focus on the reliability to improve the safety of the traffic situation. Besides, the vehicular ad-hoc network employed in the V2P safety is almost a new research field. A careful assessment of the existing pieces of literature is essential for the development of Wi-Fi-based fault-tolerant solutions.
Before introducing the different characteristics of applications for the safety of drivers and pedestrians, it is advisable to perform a brief analysis regarding other distinctions of V2X communications. They are not presumed to have high latency toleration because safety-related applications require ultra-low latency [34]. For instance, pre-crash sensing alarms typically expect a cumulative latency of less than 50 ms [35]. It is necessary to note that V2V communications based on IEEE 802.11p, in most circumstances, must be conducted in non-line-of-sight conditions, while those that are cellular-based operate more trustworthily in transmission reliability, but produce more significant latency than IEEE 802.11p. Moreover, Wi-Fi-based V2P communication is useful when the transmission range is less than 150 m. Considering that these protocols are taken into account in the approach proposed in this paper, in a possible concrete implementation, these metrics should be recognized. Another characteristic to evaluate is related to communication security [36,37]. Data exchange between vehicles and other elements can be complicated as numerous data formats are transferred within various networks. One crucial concern is whether the data obtained from the V2X networks can be trusted, primarily if it is practiced for safety-related applications. For instance, an intruder could alter the transmitting operation to broadcast incorrect data deliberately. Further, data transferred in the V2X network might be modified by an attacker to mislead vehicles, which may lead to traffic accidents. Proper security schemes can be adopted, but extra latency may be introduced [38].
3. Concepts for Safety Applications
3.1. Vehicle Safety Application
Since the OBU does not have a user interface (UI) to interact with the driver, the vehicle security application is developed on a tablet and allows driving information to be displayed and collision warnings to be provided. After connecting to the OBU’s Wi-Fi, the tablet can get the driving information of the surrounding vehicles. The GPS module installed in the OBU can provide location and speed information. The OBU allows for controlling several essential vehicle parameters, such as the speed or current fuel consumption, through the OBD-RS232 interpreter installed in the vehicle. It is useful to note that the measurements relating to the speed supplied by the OBD are more precise than those provided by the GPS.
As mentioned above, the OBU can obtain driving information on surrounding vehicles through the use of the IEEE 802.11p. As a consequence, the latter can also be used to estimate an incoming collision. In general, after receiving a package via IEEE 802.11p, the OBU can transfer it through Wi-Fi to the tablets and smartphones. With all this information obtained via Wi-Fi, thanks to the vehicular ad-hoc network (VANET) [39,40,41,42,43,44] application, it is possible to help the driver in monitoring vehicle status and threats from surrounding vehicles [45]. When the tablet estimates an incoming collision, it will inform the driver with a warning on the screen and a voice alert. The detailed information screen can display some parameters related to the surrounding vehicles, such as the position (longitude and latitude), driving speed, direction, and acceleration. After the tablet has received information on surrounding vehicles, it will notify the driver about the possibility of these vehicles generating a collision, thus ensuring more excellent safety for motorists. Moreover, attention appears to be focused mainly near road intersections, areas typically more characterized by possible clashes between motor vehicles [46].
Finally, when the tablet receives messages from the vehicle on which it is installed and other data by the surrounding vehicles, it can translate the latitudes and longitudes of the rectangular coordinate system of the Gauss–Krueger plane. Then, it estimates the driving vector of each vehicle and finds potential vehicles that cross with the vehicle concerned. If the carriers have an intersection nearby, they will calculate the time of the current vehicle and the vehicle with which it could crash. If these two times are below the threshold of the safety reaction time, then these two vehicles will have the risk of crashing each other.
3.2. Pedestrian Safety Application
Parallel to the application developed for the safety of motor vehicles, a smartphone security application can also be developed, useful for safeguarding distracted pedestrians. With messages received from the OBU via Wi-Fi [47], the application can provide the alert in the most appropriate mode based on the state of the smartphone. Concerning smartphones, in recent years, there has been a significant growth regarding their performance. Even mid or low range devices achieve remarkable performance, which until a few years ago was unthinkable for smartphones of these categories. This goal has been made possible thanks to an implicit standardization of the components to be used in terms of CPU, memory, and wireless protocols, such as cellular networks, Bluetooth, and Wi-Fi. The manufacturers of the most popular operating systems (Apple—iOS; Google—Android) now differentiate their products only for very small functionality, mostly focused on the use of artificial intelligence or augmented reality. The functioning of the apps is almost the same in both operating systems. Consequently, the diversity of operating systems is not a problem. Some small differences in performance could be found between high-level and low-level smartphones due to the diversity of the used hardware. Anyhow, it is evident that, in the future, the minimum requirements regarding the hardware and version of the operating system could be standardized to make the system work appropriately without incurring possible problems.
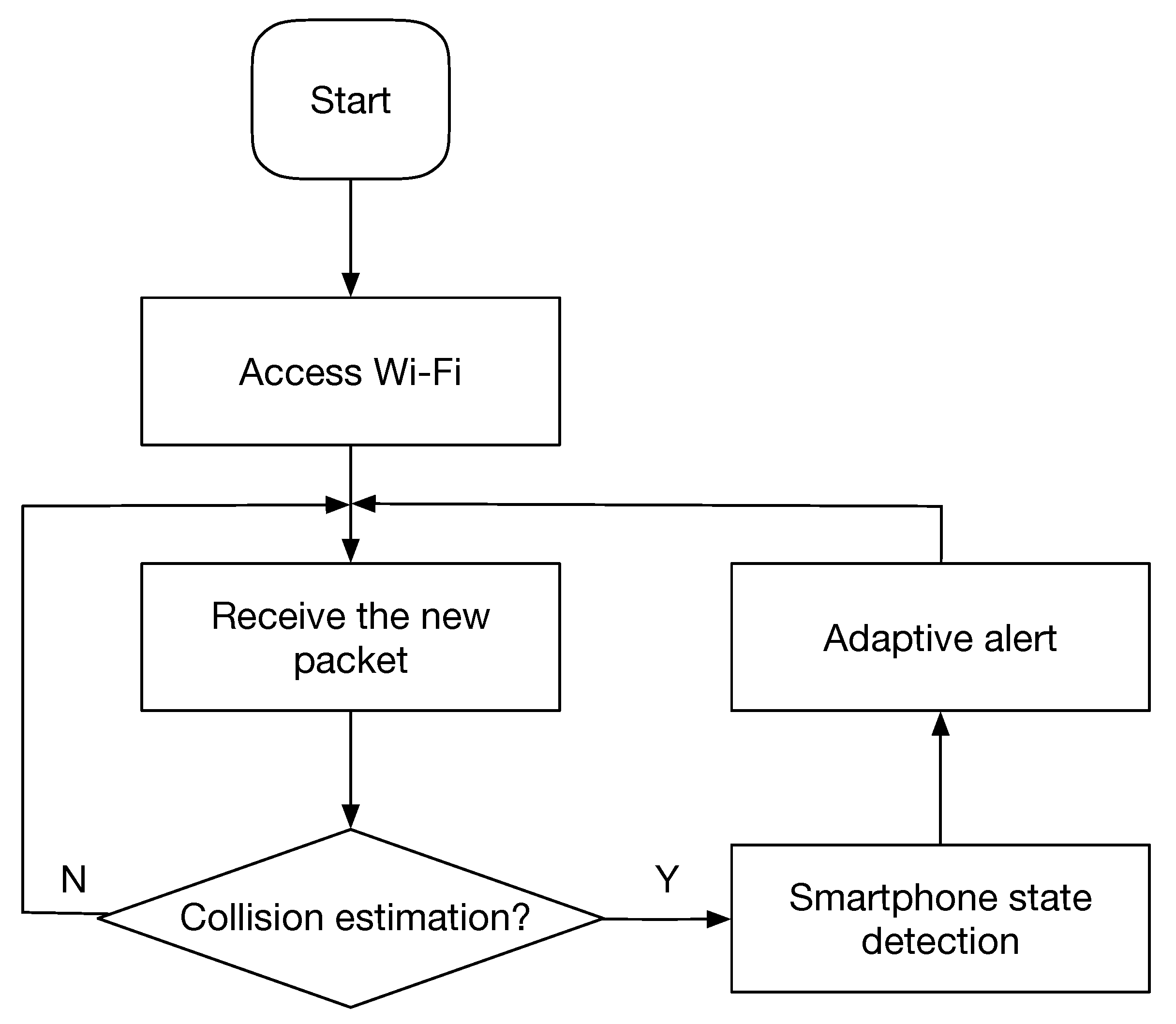
A possible implementation of the application is described in the flowchart depicted in Figure 3. First, the smartphone must access the open hotspot from the OBU, so that it can receive driving information from surrounding vehicles. After receiving a new package from the OBU, the smartphone will perform the collision estimation to recognize if the pedestrian could be run over by the vehicle. The application reads the GPS data of the smartphone to obtain the pedestrian position and information concerning its movement. Thus, the latitudes and longitudes of the smartphone and vehicle can be translated into the rectangular Gauss–Krueger plane. Next, the moving vectors of the smartphone and the vehicle will be calculated to see if they will have a collision. If the two carriers collide, the time required for the pedestrian and the vehicle to reach the intersection will be measured [14]. If the absolute time difference is lower than the safety intersection time threshold and the pedestrian crossing time is lower than the safety reaction time threshold, it is assumed that the pedestrian is at risk of being run over. With a positive collision prediction signal, a pedestrian alert is provided.
It has been already mentioned that pedestrians can use the smartphone in different ways. For each of these modes, the pedestrian will have to receive specific information, useful for grabbing attention during the specific activity performed. For instance, the specific examples can be classified into four categories: Reading an e-book, listening to music, watching and listening to a movie, inactive state. This classification is based on which specific part of the smartphone the user is focusing on. As a result, attention can be given to the screen rather than to the audio of the smartphone. The choice of the most suitable warning mode for the specific state of use is important to attract the pedestrian’s attention. For example, a piece of sound information must be provided to capture the attention of the pedestrian. In each specific case, therefore, the most suitable warning mode corresponding to the state of use of the smartphone will be chosen. By analyzing the individual specific cases, it is possible to conclude that:
- In the screen-oriented state, the warning can consist of a message visible on the screen, i.e., the warning message is printed on the screen;
- a voice alert can be provided in the voice-oriented state. For instance, when the vehicle that could cause a collision with the pedestrian threat comes from the left side, the pedestrian will hear a distinctive voice that could state, “Collision forewarning! Please pay attention to the car on the left side”;
- in the voice screen state, pedestrians can receive both the voice alert and the message on the screen simultaneously.
4. Conclusions
For several years, car manufacturers and government agencies have been looking at approaches to enhance road safety and effectively manage traffic flows. With the progress of wireless communication systems, the vision of cars that communicate with each other (V2V) and with systems placed at the edges of roads (V2I), this is becoming a reality. These wireless communication systems for vehicle-to-everything communications (V2X) are collectively known as intelligent transport systems (ITS). The numerous sensors that have been routinely installed on vehicles already detect information on distances to surrounding objects and their speeds. Anyhow, it is well known that the sharing of information from the vehicle to everything around it could allow acknowledging of surrounding situations so that the car driver can practice appropriate countermeasures to avoid accidents or get into the smoother traffic flow.
In this paper, the concepts for the development of a solution based on V2X communications aimed at vehicle and pedestrian safety have been presented. Regarding a potential system architecture for the development of a real system concerning the safety of vehicles and pedestrians, the drafting of guidelines that could be followed in new applications has been suggested. The primary purpose of this work has not been the introduction of a solution that has already been completed and experimented. As a result, performance evaluation has not been carried out. On the contrary, this paper has aimed at the introduction of the primary insights that a potential application for driver and pedestrian safety should support. To this end, a viable hardware and software architecture that could be employed in vehicles and mobile devices has been presented.
Further effort must be made to address some challenges related to this research field. For instance, the communication systems between vehicles require a stable wireless connection to maximize the transmission capacity of information in order to increase the safety of passengers. The receivers must be able to detect signals even in the worst conditions, e.g., low signal-to-noise ratio, poor modulation quality, and propagation conditions plagued by considerable fading, to ensure an excellent wireless connection. Furthermore, the rapid evolution of systems and components increases the complexity of the design. At the same time, the continuously updated regulations require a more significant number of tests and reliable and accurate results. Test budgets and methodologies fail to keep pace with the speed of innovation, putting pressure on test teams to reach results faster with fewer resources. The test must be able to respond to different types of requirements due to the need to create increasingly complex test systems, and be able to manage different types of measurements and, at the same time, the exponential growth of the collected data. This circumstance is not a problem only for the automotive industry. The same happens in similar sectors, such as heavy vehicles, aerospace, industrial machinery, and research. As a consequence, specific tools are required to optimize the workflow without sacrificing the flexibility to address these challenges.
Some future works concerning V2P applications could focus on mobile-accessible pedestrian signal systems. An application that enables an automatic call from the smartphone of the pedestrian who is blind or has low-vision to the traffic signal could be developed. Further, drivers endeavoring to perform a turn could be warned of the proximity of a pedestrian at the crosswalk. Other research could be performed warning of pedestrians at signalized crosswalks, for instance, developing an application that alerts transportation bus drivers when pedestrians, within the crosswalk of a signalized intersection, are in the expected path of the bus. Other efforts could be performed in investigating systems that can automatically brake a vehicle to avoid hitting a pedestrian, collectively referred to as pedestrian crash avoidance and mitigation systems. The large-scale dissemination of these methodologies could potentially reduce a considerable percentage of pedestrian crashes.
Author Contributions
The authors contributed equally to this work. All authors (G.P., F.A. and A.S.) have read and agreed to the published version of the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
This work was related to the D.D. 407 of 27 February 2018 “AIM—Attrazione e Mobilità Internazionale” issued by the Italian Ministry of Education, University, and Research in implementation of Action I.2 “Mobilità dei Ricercatori” Asse I— PON R&I 2014–2020, taking into account the written amendment procedure of the PON R&I 2014–2020, pursuant to articles 30 and 90 of Regulation (EU) 1303/2013 started on 21 February 2018 as well as the relevant implementation regulations.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Neto, V.; Medeiros, D.; Campista, M. Analysis of mobile user behavior in vehicular social networks. In Proceedings of the 2016 7th International Conference on the Network of the Future (NOF), Buzios, Brazil, 16–18 November 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Deb, S.; Rahman, M.M.; Strawderman, L.J.; Garrison, T.M. Pedestrians’ Receptivity Toward Fully Automated Vehicles: Research Review and Roadmap for Future Research. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 279–290. [Google Scholar] [CrossRef]
- Uchida, N.; Takeuchi, S.; Ishida, T.; Shibata, Y. Mobile traffic accident prevention system based on chronological changes of wireless signals and sensors. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2017, 8, 57–66. [Google Scholar] [CrossRef]
- Giliberto, M.; Arena, F.; Pau, G. A fuzzy-based solution for optimized management of energy consumption in e-bikes. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2019, 10, 45–64. [Google Scholar] [CrossRef]
- Larue, G.; Watling, C.; Black, A.; Wood, J.; Khakzar, M. Pedestrians distracted by their smartphone: Are in-ground flashing lights catching their attention? A laboratory study. Accid. Anal. Prev. 2020, 134. [Google Scholar] [CrossRef]
- Song, F.; Zhu, M.; Zhou, Y.; You, I.; Zhang, H. Smart Collaborative Tracking for Ubiquitous Power IoT in Edge-Cloud Interplay Domain. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Rangesh, A.; Trivedi, M.M. When Vehicles See Pedestrians With Phones: A Multicue Framework for Recognizing Phone-Based Activities of Pedestrians. IEEE Trans. Intell. Veh. 2018, 3, 218–227. [Google Scholar] [CrossRef] [Green Version]
- Toppan, A.; Bazzi, A.; Toppan, P.; Masini, B.; Andrisano, O. Architecture of a simulation platform for the smart navigation service investigation. In Proceedings of the 2010 IEEE 6th International Conference on Wireless and Mobile Computing, Networking and Communications, Niagara Falls, ON, Canada, 11–13 October 2010; pp. 548–554. [Google Scholar] [CrossRef]
- Pau, G.; Campisi, T.; Canale, A.; Severino, A.; Collotta, M.; Tesoriere, G. Smart pedestrian crossing management at traffic light junctions through a fuzzy-based approach. Future Internet 2018, 10, 15. [Google Scholar] [CrossRef] [Green Version]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A. The effects of urban traffic noise on children at kindergarten and primary school: A case study in Enna. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040, p. 140005. [Google Scholar] [CrossRef]
- Ticali, D.; Denaro, M.; Barracco, A.; Guerrieri, M. Piezoelectric energy harvesting from raised crosswalk devices. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2015; Volume 1648. [Google Scholar] [CrossRef]
- Arena, F.; Ticali, D. The development of autonomous driving vehicles in tomorrow’s smart cities mobility. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Xia, S.; de Godoy Peixoto, D.; Islam, B.; Islam, M.T.; Nirjon, S.; Kinget, P.R.; Jiang, X. Improving Pedestrian Safety in Cities Using Intelligent Wearable Systems. IEEE Internet Things J. 2019, 6, 7497–7514. [Google Scholar] [CrossRef]
- Ai, Z.; Liu, Y.; Song, F.; Zhang, H. A Smart Collaborative Charging Algorithm for Mobile Power Distribution in 5G Networks. IEEE Access 2018, 6, 28668–28679. [Google Scholar] [CrossRef]
- Song, F.; Ai, Z.; Zhou, Y.; You, I.; Choo, R.; Zhang, H. Smart Collaborative Automation for Receive Buffer Control in Multipath Industrial Networks. IEEE Trans. Ind. Inform. 2019. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef] [Green Version]
- Silva, C.; Silva, L.; Santos, L.; Sarubbi, J.; Pitsillides, A. Broadening understanding on managing the communication infrastructure in vehicular networks: Customizing the coverage using the Delta Network. Future Internet 2018, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Sheu, S.; Hsie, P.; Cheng, Y.; Wu, J. Coordinated scheduling scheme for IEEE 802.11p wireless vehicular networks using centralized scheduling of IEEE 802.16e wireless metropolitan area networks. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 772–776. [Google Scholar] [CrossRef]
- IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as Amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE: Piscataway, NJ, USA, 2010; pp. 1–51. [CrossRef]
- Hancke, G.P.; Silva Bde, C.; Hancke, G.P., Jr. The Role of Advanced Sensing in Smart Cities. Sensors 2013, 13, 393–425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Masini, B.; Zuliani, L.; Andrisano, O. On the effectiveness of a GPRS based intelligent transportation system in a realistic scenario. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; Volume 6, pp. 2997–3001. [Google Scholar]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A.; Arena, F. Modelling and simulation of passenger flow distribution at terminal of Catania airport. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.; Zanella, A. Performance comparison between IEEE 802.11p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 109–114. [Google Scholar]
- Ticali, D.; Acampa, G.; Denaro, M. Renewable energy efficiency by railway transit. Case study on Rebaudengo railway tunnel in Turin. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. A distributed virtual traffic light algorithm exploiting short range V2V Communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Balador, A.; Uhlemann, E.; Calafate, C.; Cano, J.C. Supporting beacon and event-driven messages in vehicular platoons through token-based strategies. Sensors 2018, 18, 955. [Google Scholar] [CrossRef] [Green Version]
- Zhenyu, L.; Lin, P.; Konglin, Z.; Lin, Z. Design and evaluation of V2X communication system for vehicle and pedestrian safety. J. China Univ. Posts Telecommun. 2015, 22, 18–26. [Google Scholar] [CrossRef]
- Capallera, M.; Carrino, S.; De Salis, E.; Khaled, O.; Meteier, Q.; Angelini, L.; Mugellini, E. Secondary task and situation awareness, a mobile application for conditionally automated vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings, Utrecht, The Netherlands, 21–25 September 2019; pp. 86–92. [Google Scholar]
- Veena, S.; Ramyadevi, K.; Elavarasi, K.; Preetha, M. Smart car automated system to assist the driverin detecting the problem and providing the solution. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 727–731. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Morold, M.; David, K.; Dressler, F. Car-to-Pedestrian communication with MEC-support for adaptive safety of Vulnerable Road Users. Comput. Commun. 2020, 150, 83–93. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Wang, Y.; Zhao, T.; You, I.; Zhang, H. Smart Collaborative Distribution for Privacy Enhancement in Moving Target Defense. Inform. Sci. 2019, 479, 593–606. [Google Scholar] [CrossRef]
- Wang, S.; Yuan, J.; Li, X.; Qian, Z.; Arena, F.; You, I. Active Data Replica Recovery for Quality-Assurance Big Data Analysis in IC-IoT. IEEE Access 2019, 7, 106997–107005. [Google Scholar] [CrossRef]
- Linux Wireless Wiki. Available online: https://wireless.wiki.kernel.org (accessed on 31 October 2019).
- Qiu, H.; Qiu, M.; Lu, Z.; Memmi, G. An efficient key distribution system for data fusion in V2X heterogeneous networks. Inf. Fusion 2019, 50, 212–220. [Google Scholar] [CrossRef]
- Filippi, A.; Moerman, K.; Daalderop, G.; Alexandera, P.D.; Schober, F.; Pfliegl, W. Ready to roll: why 802.11p beats LTE and 5G for V2X, A White Paper. Available online: https://assets.new.siemens.com/siemens/assets/public.1510309207.ab5935c545ee430a94910921b8ec75f3c17bab6c.its-g5-ready-to-roll-en.pdf (accessed on 13 November 2019).
- Khodaei, M.; Noroozi, H.; Papadimitratos, P. Scaling Pseudonymous Authentication for Large Mobile Systems. In Proceedings of the WiSec ’19 Proceedings of the 12th Conference on Security and Privacy in Wireless and Mobile Networks, Miami, FL, USA, 15–17 May 2019; pp. 174–184. [Google Scholar] [CrossRef] [Green Version]
- Qiu, H.; Kapusta, K.; Lu, Z.; Qiu, M.; Memmi, G. All-Or-Nothing data protection for ubiquitous communication: Challenges and perspectives. Inf. Sci. 2019, 502, 434–445. [Google Scholar] [CrossRef]
- Qiu, H.; Qiu, M.; Lu, R. Secure V2X Communication Network based on Intelligent PKI and Edge Computing. IEEE Netw. 2019, 1–7. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Tropea, M.; Fazio, P.; De Rango, F. Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation. Sensors 2018, 18, 1461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Medeiros, D.S.; Hernandez, D.A.; Campista, M.E.M.; Aloysio de Castro, P.P. Impact of relative speed on node vicinity dynamics in VANETs. Wirel. Netw. 2019, 25, 1895–1912. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. An OFDMA-Based MAC Protocol for Next-Generation VANETs. IEEE Trans. Veh. Technol. 2015, 64, 4088–4100. [Google Scholar] [CrossRef]
- Nkenyereye, L.; Tama, B.; Park, Y.; Rhee, K. A fine-grained privacy preserving protocol over attribute based access control for VANETs. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2015, 6, 98–112. [Google Scholar]
- Sarubbi, J.; Silva, T.; Martins, F.; Wanner, E.; Silva, C. Allocating Roadside Units in VANETs Using a Variable Neighborhood Search Strategy. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Eziama, E.; Tepe, K.; Balador, A.; Nwizege, K.; Jaimes, L. Malicious Node Detection in Vehicular Ad-Hoc Network Using Machine Learning and Deep Learning. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Brahmi, H.I.; Djahel, S.; Murphy, J. Improving emergency messages transmission delay in road monitoring based WSNs. In Proceedings of the 6th Joint IFIP Wireless and Mobile Networking Conference (WMNC), Dubai, UAE, 23–25 April 2013; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Chen, P.; Chen, W. A Novel Emergency Vehicle Dispatching System. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Vaculík, M.; Franeková, M.; Vestenický, P.; Vestenický, M. On-board Unit and its Possibilities of Communications on Safety and Security Principles. Adv. Electr. Electron. Eng. 2008, 7, 235–238. [Google Scholar]
Figure 1.
The proposed system architecture.

Figure 2.
The proposed software architecture.

Figure 3.
Application flowchart.

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Arena, F.; Pau, G.; Severino, A. V2X Communications Applied to Safety of Pedestrians and Vehicles. J. Sens. Actuator Netw. 2020, 9, 3. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan9010003
AMA Style
Arena F, Pau G, Severino A. V2X Communications Applied to Safety of Pedestrians and Vehicles. Journal of Sensor and Actuator Networks. 2020; 9(1):3. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan9010003
Chicago/Turabian StyleArena, Fabio, Giovanni Pau, and Alessandro Severino. 2020. "V2X Communications Applied to Safety of Pedestrians and Vehicles" Journal of Sensor and Actuator Networks 9, no. 1: 3. https://0-doi-org.brum.beds.ac.uk/10.3390/jsan9010003
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.