
Lamb-Wave-Based Tomographic Imaging Techniques for Hole-Edge Corrosion Monitoring in Plate Structures


Abstract
:1. Introduction
2. Methodology Development
2.1. Lamb Wave for PZT Sensor
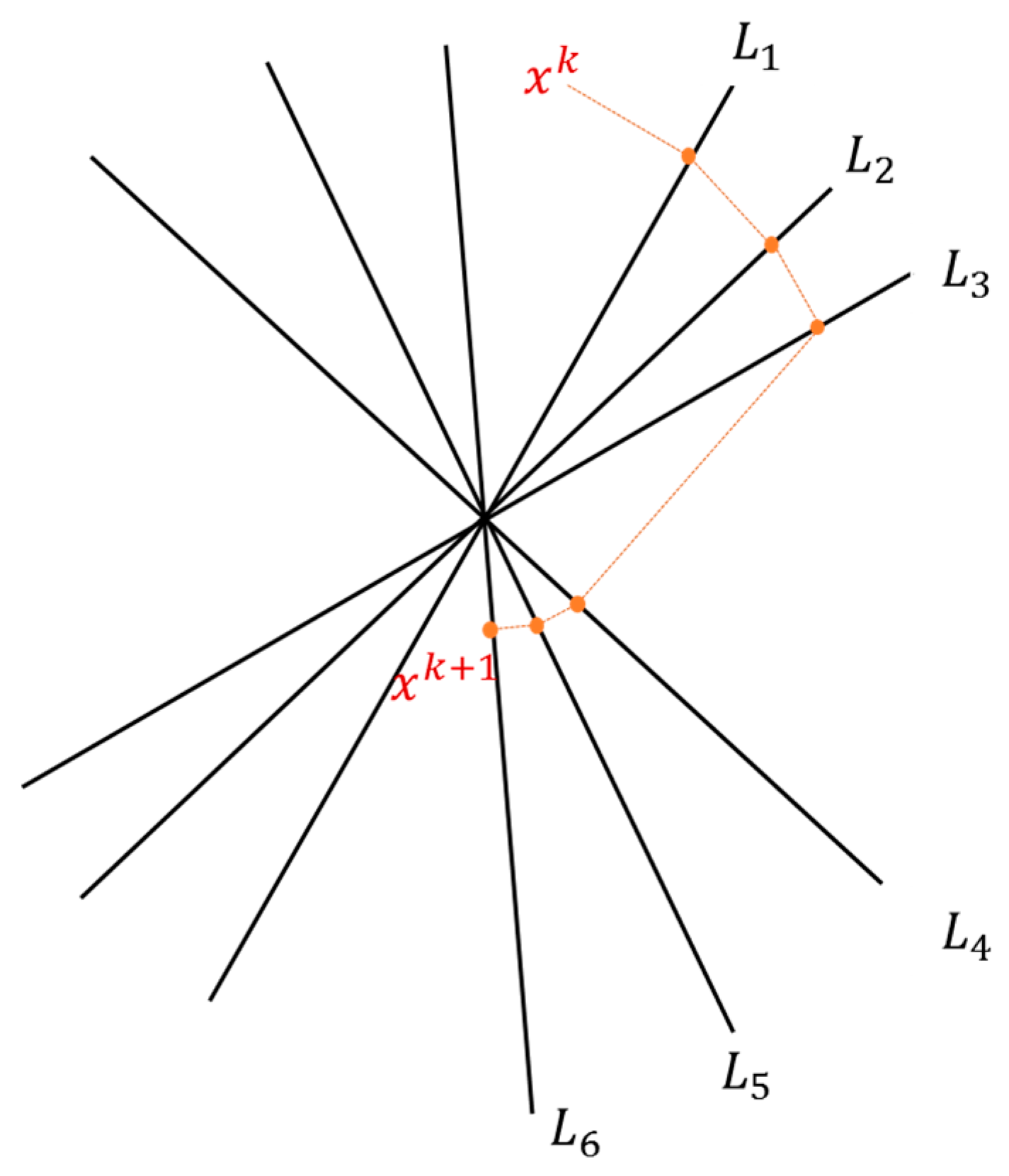
2.2. ART Method
3. Experiment Process
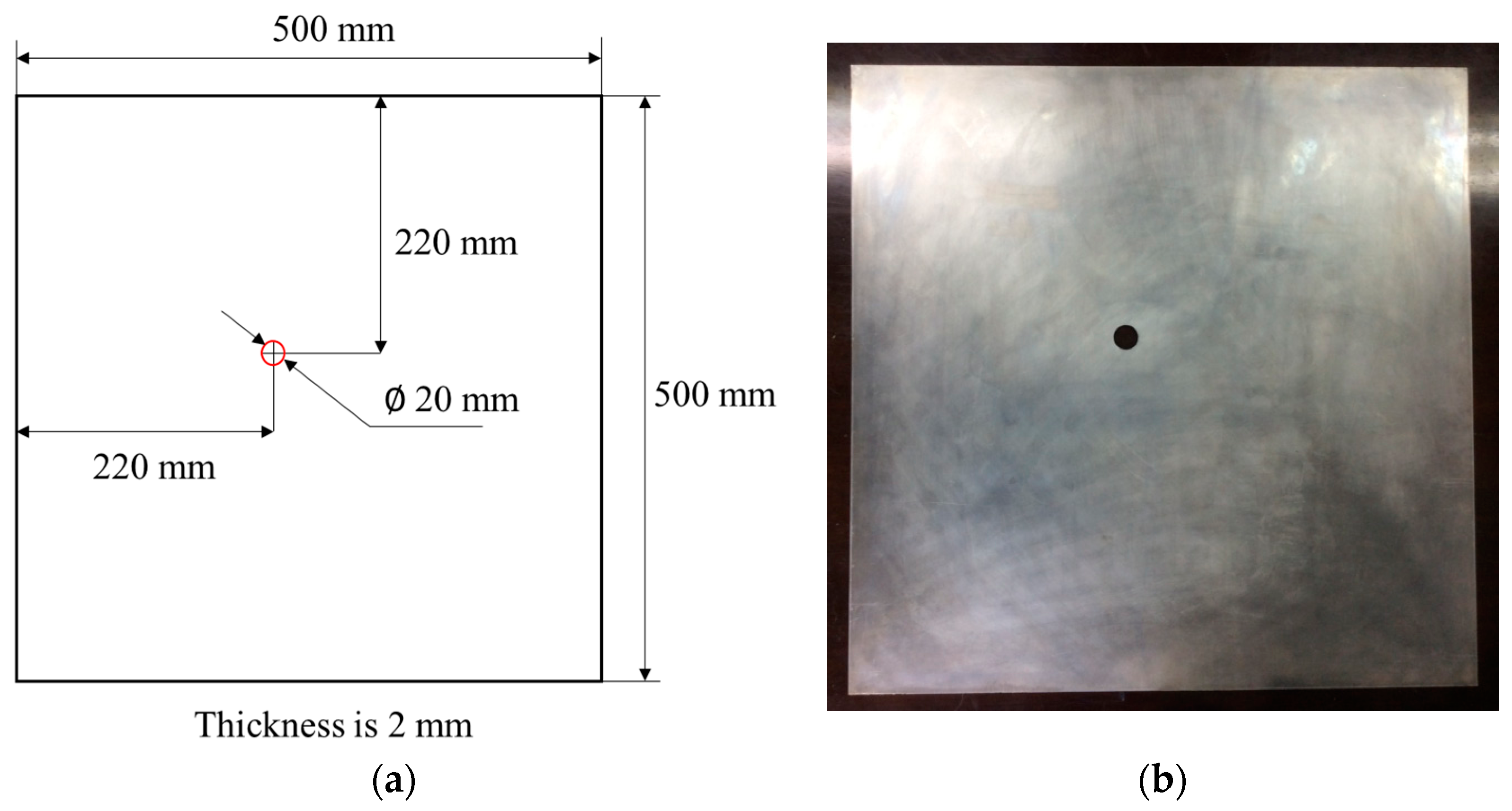
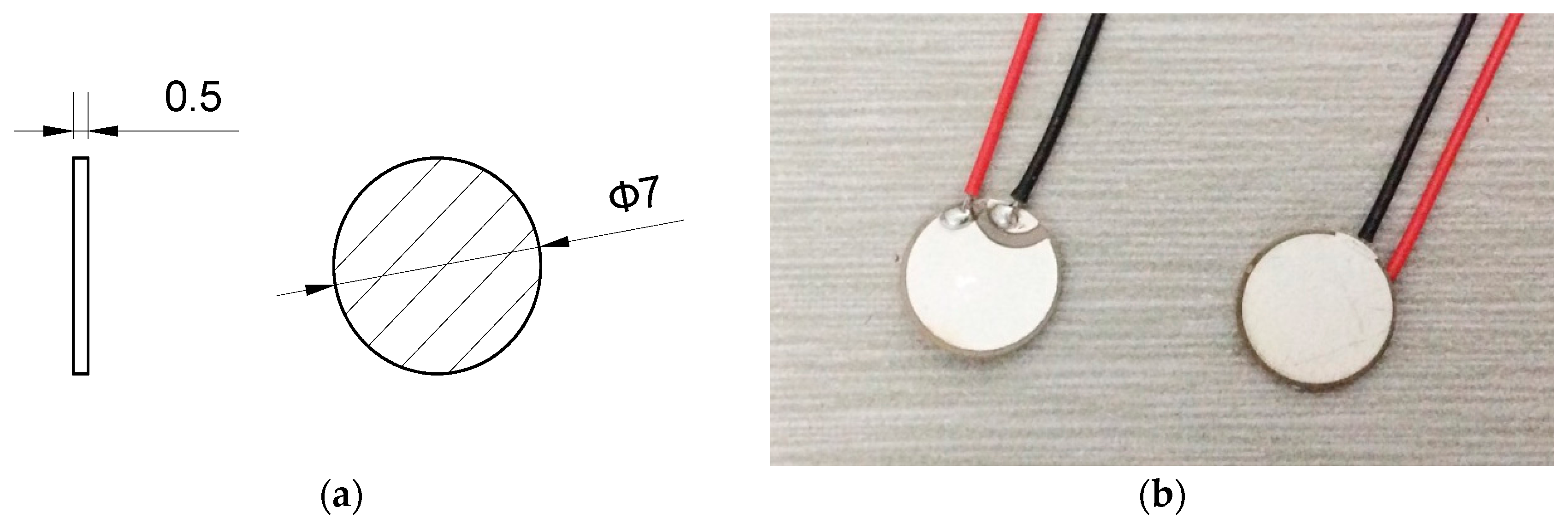
3.1. Specimen and PZT Sensor
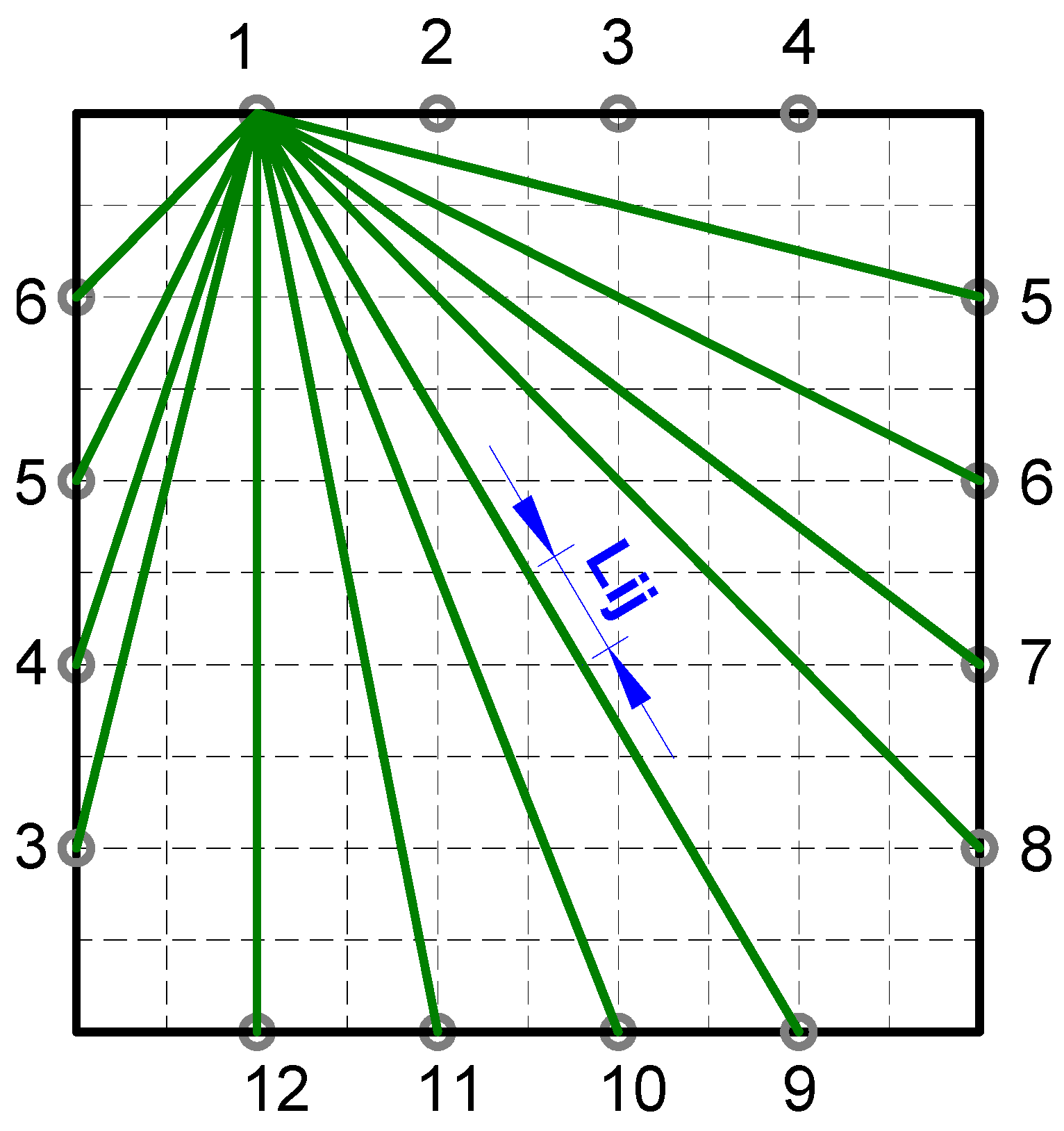
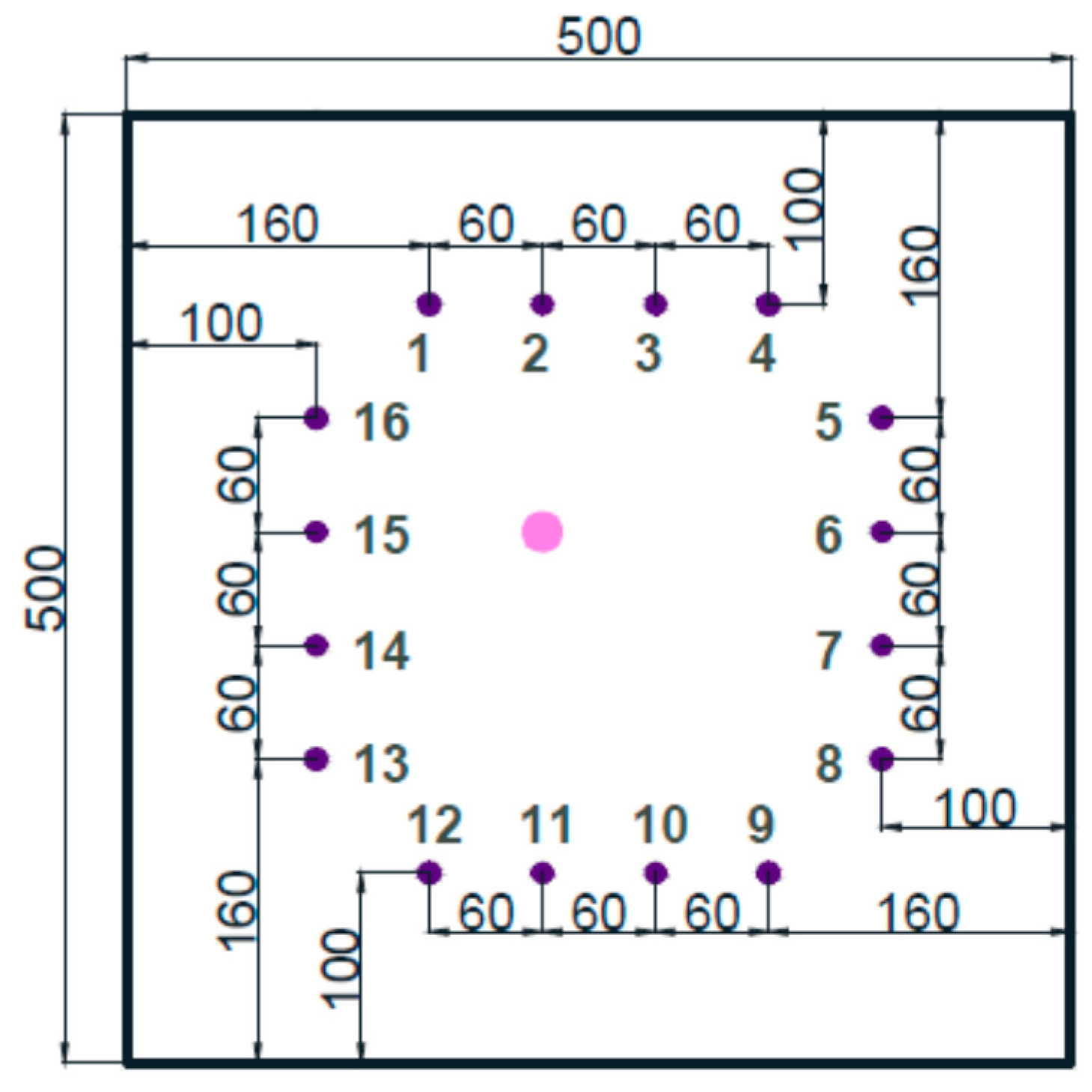
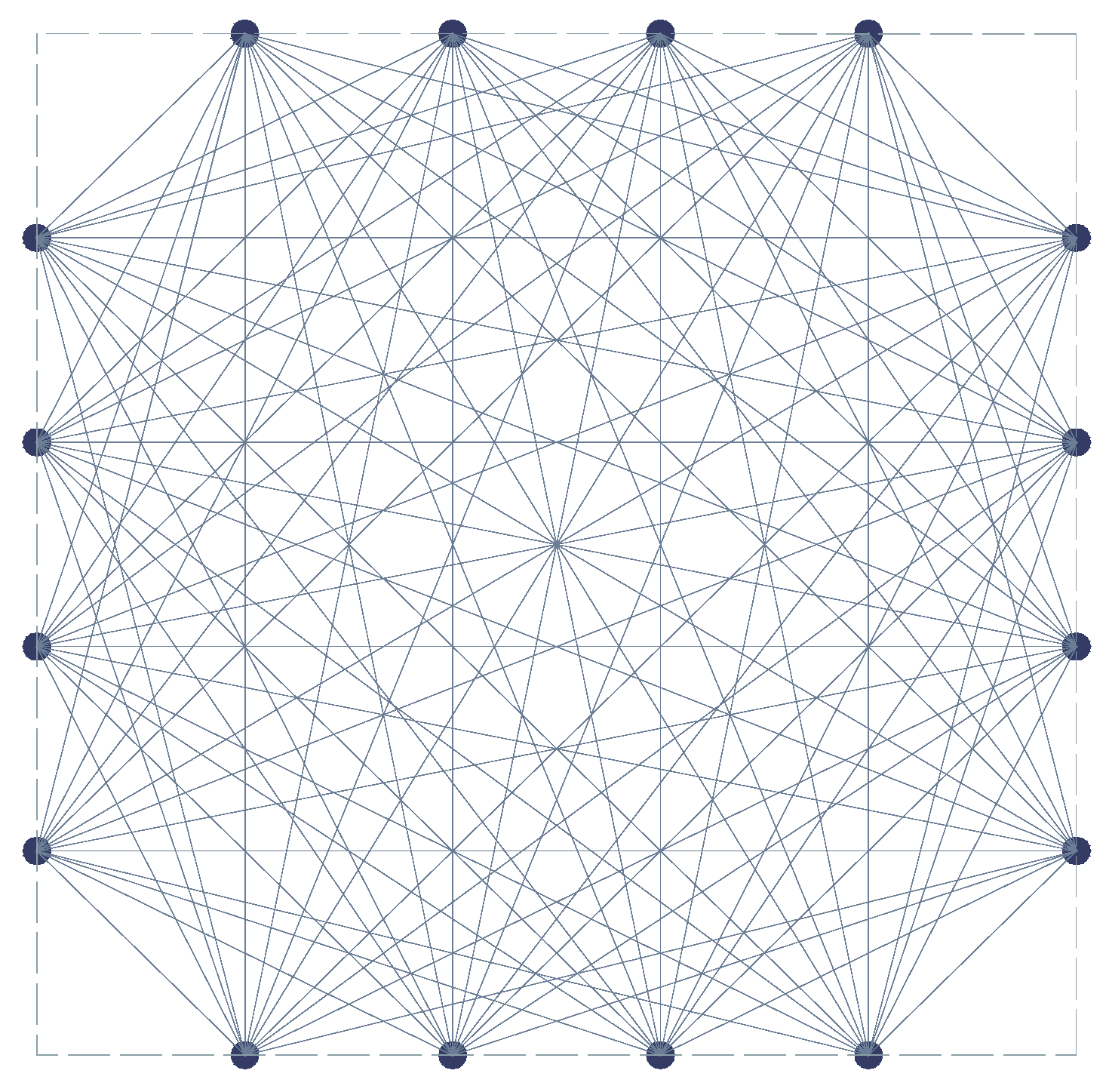
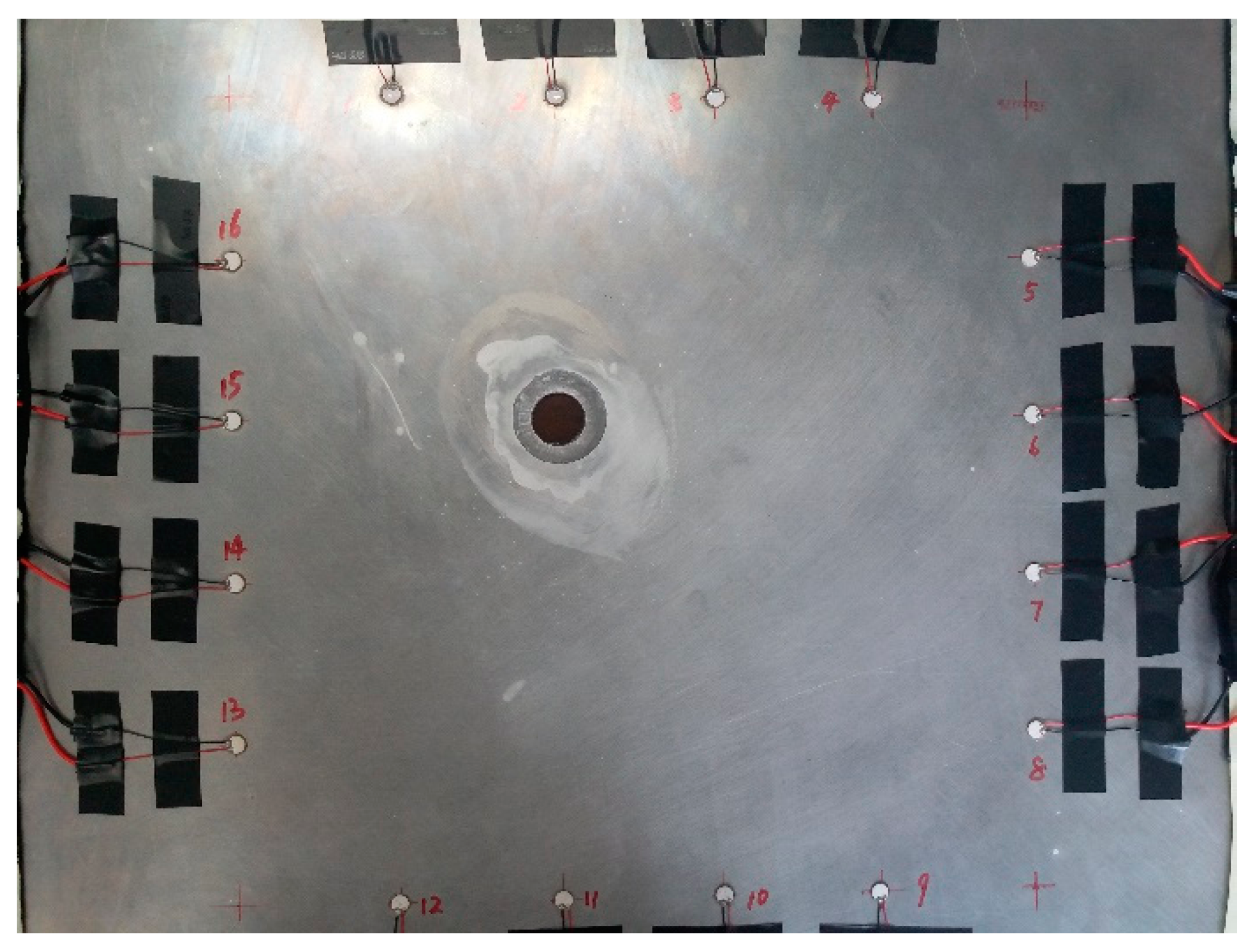
3.2. Sensor Layout
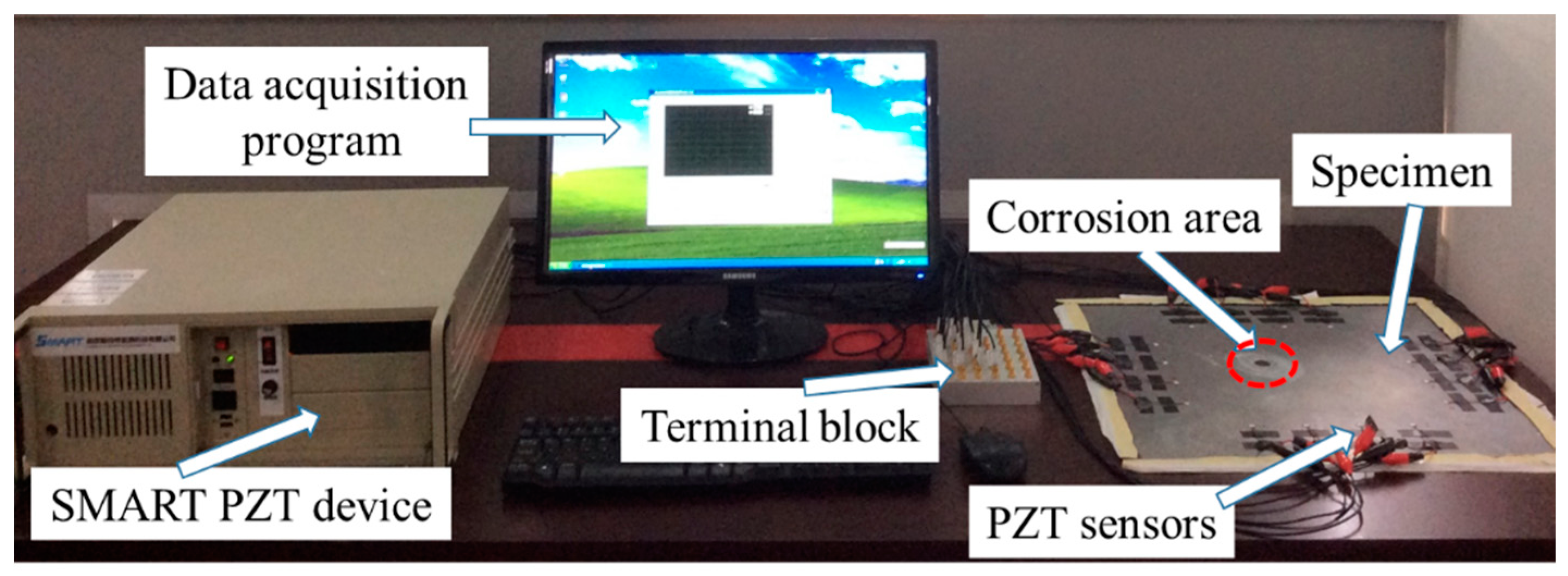
3.3. Experimental Setup
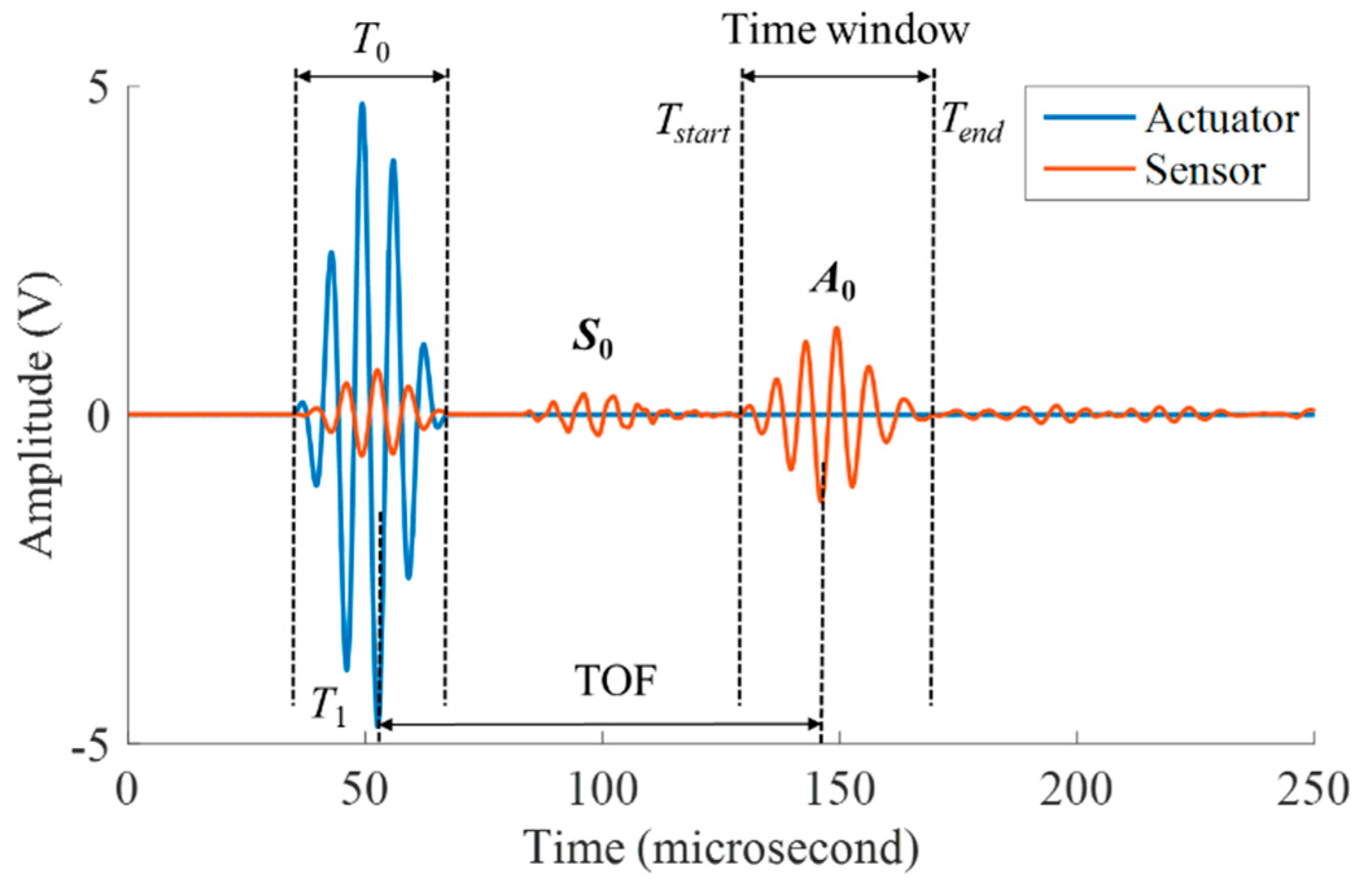
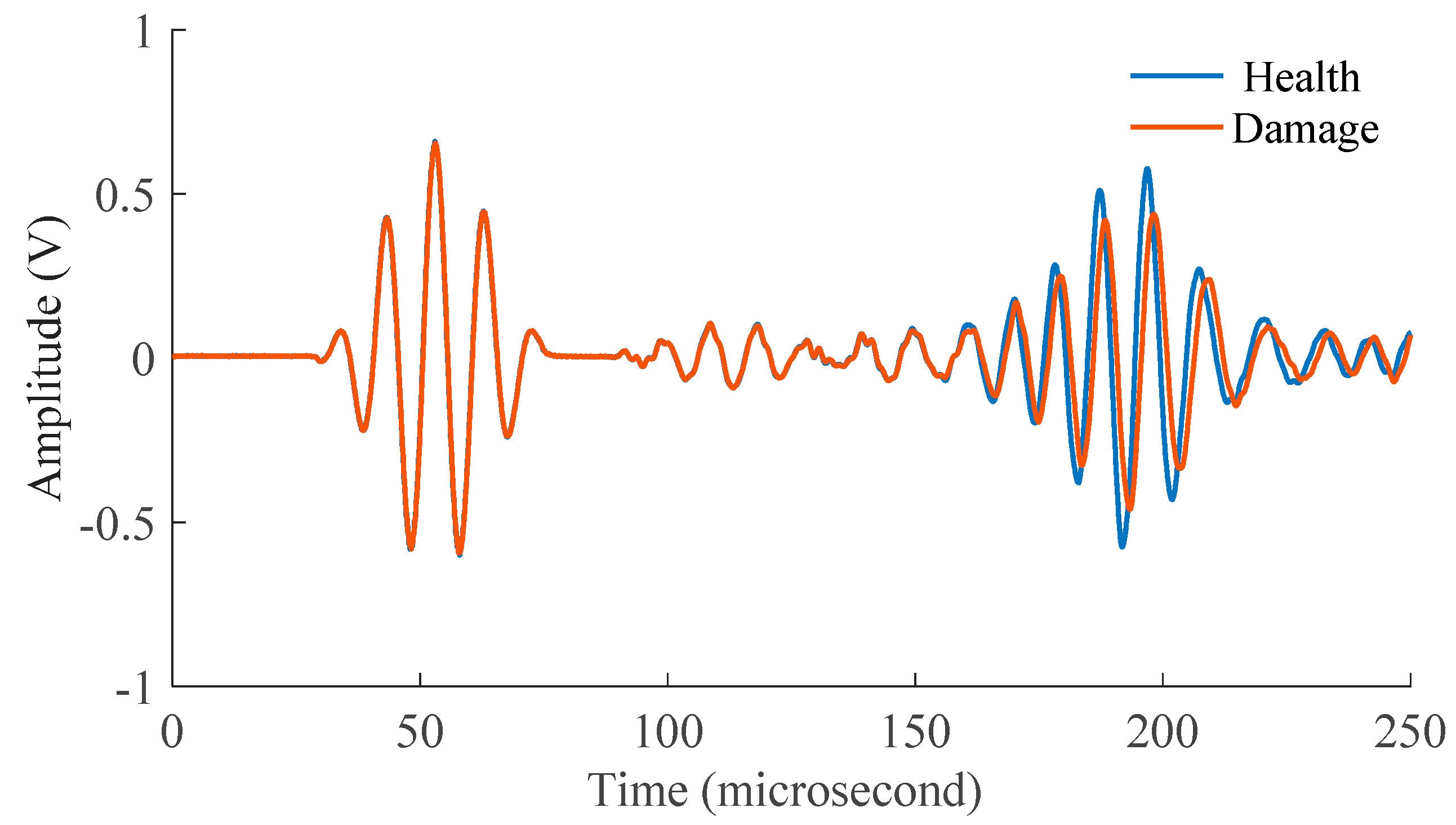
3.4. Excitation Signal
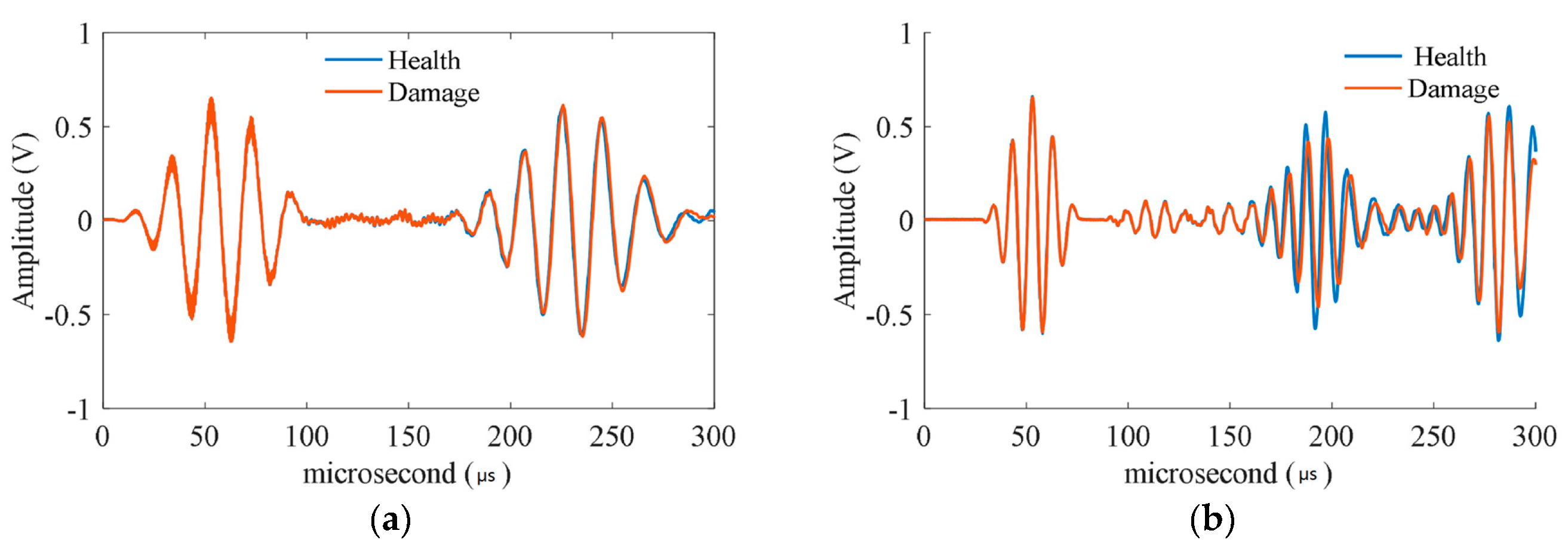
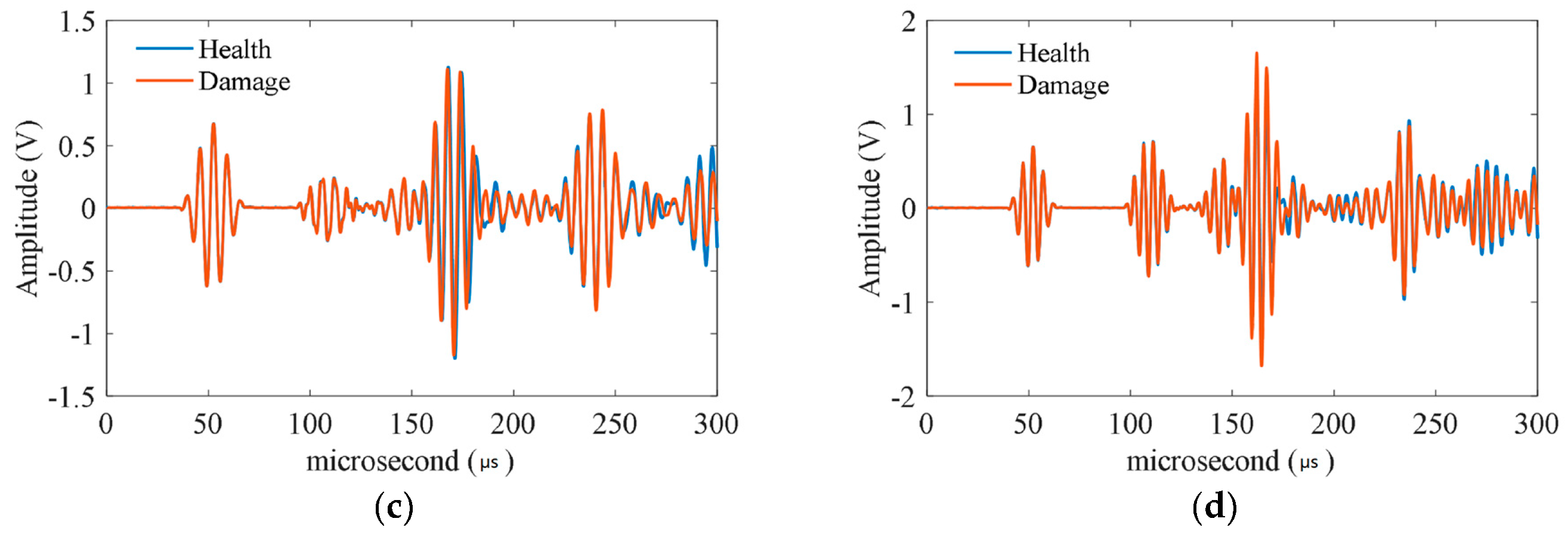
3.5. Imaging with Corrosion Damage
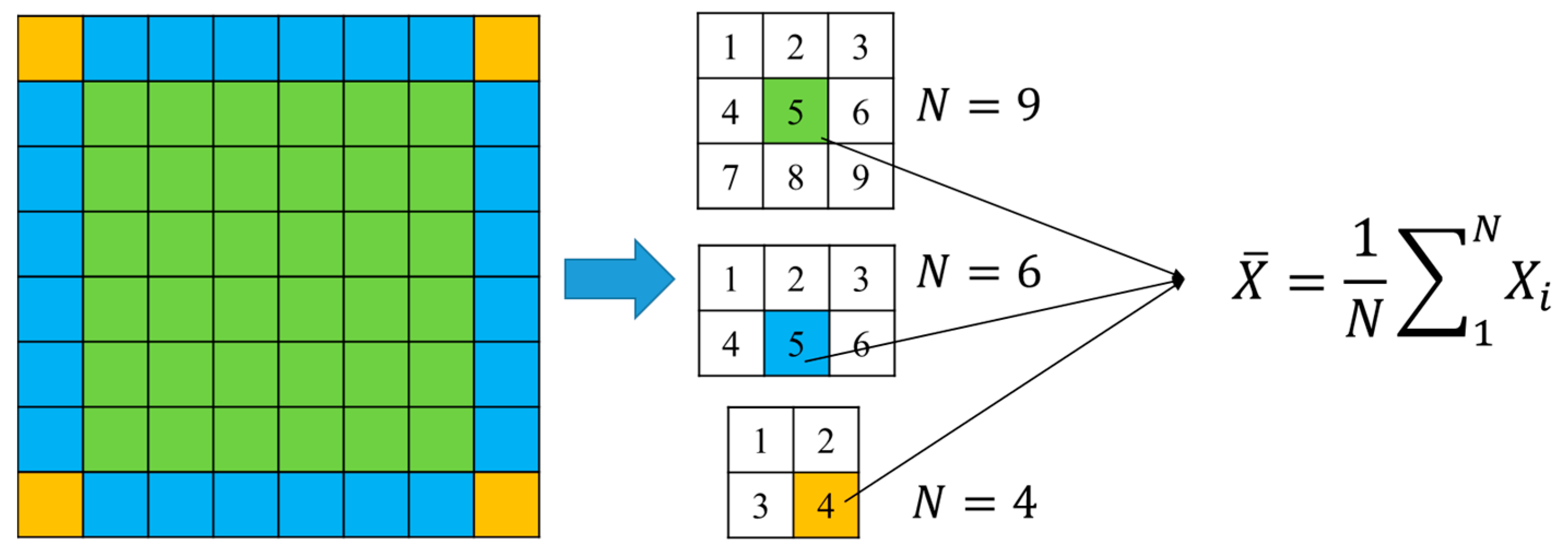
- (a)
- When the grid is in the green area, the updating step is to average the value of the surrounding eight grids with its own value.
- (b)
- When the grid is in the blue area, the updating step is to average the value of the nearby five grids with its own value.
- (c)
- When the grid is in the yellow area, the nearby three grids’ value are included with its own value to calculate a new value, which is regarded as updated.
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Drinkwater, B.W.; Wilcox, P.D. Ultrasonic arrays for non-destructive evaluation: A review. NDT E Int. 2006, 39, 525–541. [Google Scholar] [CrossRef]
- Geng, R.S. Modern acoustic emission technique and its application in aviation industry. Ultrasonics 2006, 44, 1025–1029. [Google Scholar] [CrossRef] [PubMed]
- Segebade, C. Nondestructive materials testing-overview and evaluation. DGZfP 1997, 63, 617. [Google Scholar]
- Papaelias, M.P.; Roberts, C.; Davis, C.L. A review on non-destructive evaluation of rails: State-of-the-art and future development. J. Rail Rapid Transit 2008, 222, 367–384. [Google Scholar] [CrossRef]
- Boyer, H.E.; Gall, T.L. Metals Handbook, desk ed.; American Society for Metals: Metals Park, OH, USA, 1985. [Google Scholar]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. Lond. A 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Giurgiutiu, V. Tuned lamb wave excitation and detection with piezoelectric wafer active sensors for structural health monitoring. J. Intell. Mater. Syst. Struct. 2005, 16, 291–305. [Google Scholar] [CrossRef]
- Yu, L.; Giurgiutiu, V. In situ 2-d piezoelectric wafer active sensors arrays for guided wave damage detection. Ultrasonics 2008, 48, 117–134. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.Y.; Giurgiutiu, V. In-situ optimized pwas phased arrays for lamb wave structural health monitoring. J. Mech. Mater. Struct. 2007, 2, 459–487. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, L.; Li, Z. Damage detection for plate-like structure using matching pursuits with chirplet atom. In Proceedings of the SPIE-The International Society for Optical Engineering, San Diego, CA, USA, 6 March 2011; pp. 798112–798128.
- Saravanos, D.A.; Heyliger, P.R. Coupled layerwise analysis of composite beams with embedded piezoelectric sensors and actuators. J. Intell. Mater. Syst. Struct. 1995, 6, 350–363. [Google Scholar] [CrossRef]
- Bhuiyan, M.Y.; Shen, Y.; Giurgiutiu, V. Guided wave based crack detection in the rivet hole using global analytical with local fem approach. Materials 2016, 9, 602. [Google Scholar] [CrossRef]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Khare, S.; Razdan, M.; Jain, N.; Munshi, P.; Sekhar, B.V.S.; Balasubramaniam, K. Lamb wave tomographic reconstruction using various mart algorithms. In Proceedings of the National Seminar on Non-Destructive Evaluation, Hyderabad, India, 7–9 December 2006; pp. 285–292.
- Leonard, K.R.; Malyarenko, E.V.; Hinders, M.K. Ultrasonic lamb wave tomography. Inverse Probl. 2002, 18, 1795–1808. [Google Scholar] [CrossRef]
- Balvantin, A.; Baltazar, A. Ultrasonic tomography using lamb wave propagation parameters. In Proceedings of the 5th Pan American Conference for NDT, Cancun, Mexico, 2–6 October 2011.
- Subbarao, P.M.V.; Munshi, P.; Muralidhar, K. Performance of iterative tomographic algorithms applied to non-destructive evaluation with limited data. NDT E Int. 1997, 30, 359–370. [Google Scholar] [CrossRef]
- Prasad, S.M.; Krishnan, B.; Krishnamurthy, C.V. Structural health monitoring of composite structures using lamb wave tomography. Smart Mater. Struct. 2004, 13, 73–79. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J.L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Moustafa, A.; Salamone, S. Fractal dimension–based lamb wave tomography algorithm for damage detection in plate-like structures. J. Intell. Mater. Syst. Struct. 2012, 23, 1269–1276. [Google Scholar] [CrossRef]
- Huang, S.; Wei, Z.; Zhao, W.; Wang, S. A new omni-directional emat for ultrasonic lamb wave tomography imaging of metallic plate defects. Sensors 2014, 14, 3458–3476. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.; Zhang, Y.; Wang, S.; Zhao, W. Multi-mode electromagnetic ultrasonic lamb wave tomography imaging for variable-depth defects in metal plates. Sensors 2016, 16, 628. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Yu, H.; Fan, J.; Hu, Y.; He, C.; Wu, B. Baseline-free delamination inspection in composite plates by synthesizing non-contact air-coupled lamb wave scan method and virtual time reversal algorithm. Smart Mater. Struct. 2015, 24, 045014. [Google Scholar] [CrossRef]
- Grondel, S.; Delebarre, C.; Assaad, J.; Dupuis, J.P.; Reithler, L. Fatigue crack monitoring of riveted aluminium strap joints by lamb wave analysis and acoustic emission measurement techniques. NDT E Int. 2002, 35, 137–146. [Google Scholar] [CrossRef]
- Quaegebeur, N.; Ostiguy, P.C.; Masson, P. Correlation-based imaging technique for fatigue monitoring of riveted lap-joint structure. Smart Mater. Struct. 2014, 23, 055007. [Google Scholar] [CrossRef]
- Ihn, J.B.; Chang, F.K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: Ii. Validation using riveted joints and repair patches. Smart Mater. Struct. 2004, 13, 621–630. [Google Scholar] [CrossRef]
- He, J.; Guan, X.; Peng, T.; Liu, Y.; Saxena, A.; Celaya, J.; Goebel, K. A multi-feature integration method for fatigue crack detection and crack length estimation in riveted lap joints using lamb waves. Smart Mater. Struct. 2013, 22, 1–12. [Google Scholar] [CrossRef]
- Wang, D.; He, J.; Dong, B.; Liu, X.; Zhang, W. Novel damage detection techniques for structural health monitoring using a hybrid sensor. Math Probl. Eng. 2016, 2016, 3734258. [Google Scholar] [CrossRef]
- Chang, Z.; Mal, A. Scattering of lamb waves from a rivet hole with edge cracks. Mech. Mater. 1999, 31, 197–204. [Google Scholar] [CrossRef]
- Hu, B.; Hu, N.; Li, L.L.; Li, W.G.; Tang, S.; Li, Y.; Peng, X.H.; Homma, A.; Liu, Y.L.; Wu, L.K.; et al. Tomographic reconstruction of damage images in hollow cylinders using lamb waves. Ultrasonics 2014, 54, 2015–2023. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Yuan, F.G. Diagnostic lamb waves in an integrated piezoelectric sensor/actuator plate: Analytical and experimental studies. Smart Mater. Struct. 2001, 10, 907–913. [Google Scholar] [CrossRef]
- Lu, Y.; Ye, L.; Wang, D.; Zhong, Z.R. Time-domain analyses and correlations of lamb wave signals for damage detection in a composite panel of multiple stiffeners. J. Compos. Mater. 2009, 43, 3211–3230. [Google Scholar] [CrossRef]
- Farkas, M.L. Principles of Computed Tomography; Springer: New York, NY, USA, 1988; pp. 3–9. [Google Scholar]
- Gordon, R.; Bender, R.; Herman, G.T. Algebraic reconstruction techniques (art) for three-dimensional electron microscopy and X-ray photography. J. Theor. Biol. 1970, 29, 471–481. [Google Scholar] [CrossRef]
- Chai, H.K.; Liu, K.F.; Behnia, A.; Yoshikazu, K.; Shiotani, T. Development of a tomography technique for assessment of the material condition of concrete using optimized elastic wave parameters. Materials 2016, 9, 291. [Google Scholar] [CrossRef]
- Hinders, M.K.; Malyarenko, E.V. Comparison of double crosshole and fanbeam lamb wave ultrasonic tomography. In Proceedings of the AIP Conference, Ames, IA, USA, 16–20 July 2000; pp. 732–739.
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Ihn, J.B.; Chang, F.K. Pitch-catch active sensing methods in structural health monitoring for aircraft structures. Struct. Health Monit. 2008, 7, 5–19. [Google Scholar] [CrossRef]
- Kessler, S.S.; Spearing, S.M.; Soutis, C. Structural health monitoring in composite materials using lamb wave methods. In Proceedings of the Sixteenth Technical Conference of the American Society for Composites, Blacksburg, VA, USA; 2001. [Google Scholar]
- Alleyne, D.N.; Cawley, P. The interaction of lamb waves with defects. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 381–397. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Chang, F. Built-in diagnostics for impact damage identification of composite structures. In Proceedings of the 2nd International Workshop on Structural Health monitoring, New York, NY, USA; 1999; pp. 8–10. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product ID | SMD07T05R412WL |
| Material | SM412 |
| Geometry | Diameter: 7 mm Thickness: 0.5 mm |
| Resonant Frequency | 4.25 MHz ± 5% |
| Electrostatic Capacity | 2.5 nF ± 30% |
| Test Condition | 25 °C ± 3 °C |
| Molecular Formula | HF | |
| Content of HF | ||
| Impurity Content (%) | Fe | |
| Cl | ||
| PO4 | ||
| Heavy metal (Pb) | ||
| Fluorosilicate (SiF6) | ||
| Others | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Zhang, W.; Wang, X.; Sun, B. Lamb-Wave-Based Tomographic Imaging Techniques for Hole-Edge Corrosion Monitoring in Plate Structures. Materials 2016, 9, 916. https://0-doi-org.brum.beds.ac.uk/10.3390/ma9110916
Wang D, Zhang W, Wang X, Sun B. Lamb-Wave-Based Tomographic Imaging Techniques for Hole-Edge Corrosion Monitoring in Plate Structures. Materials. 2016; 9(11):916. https://0-doi-org.brum.beds.ac.uk/10.3390/ma9110916
Chicago/Turabian StyleWang, Dengjiang, Weifang Zhang, Xiangyu Wang, and Bo Sun. 2016. "Lamb-Wave-Based Tomographic Imaging Techniques for Hole-Edge Corrosion Monitoring in Plate Structures" Materials 9, no. 11: 916. https://0-doi-org.brum.beds.ac.uk/10.3390/ma9110916