
Condition Number and Clustering-Based Efficiency Improvement of Reduced-Order Solvers for Contact Problems Using Lagrange Multipliers



Abstract
:1. Introduction
2. Contact Problem, FE, and HHR Models
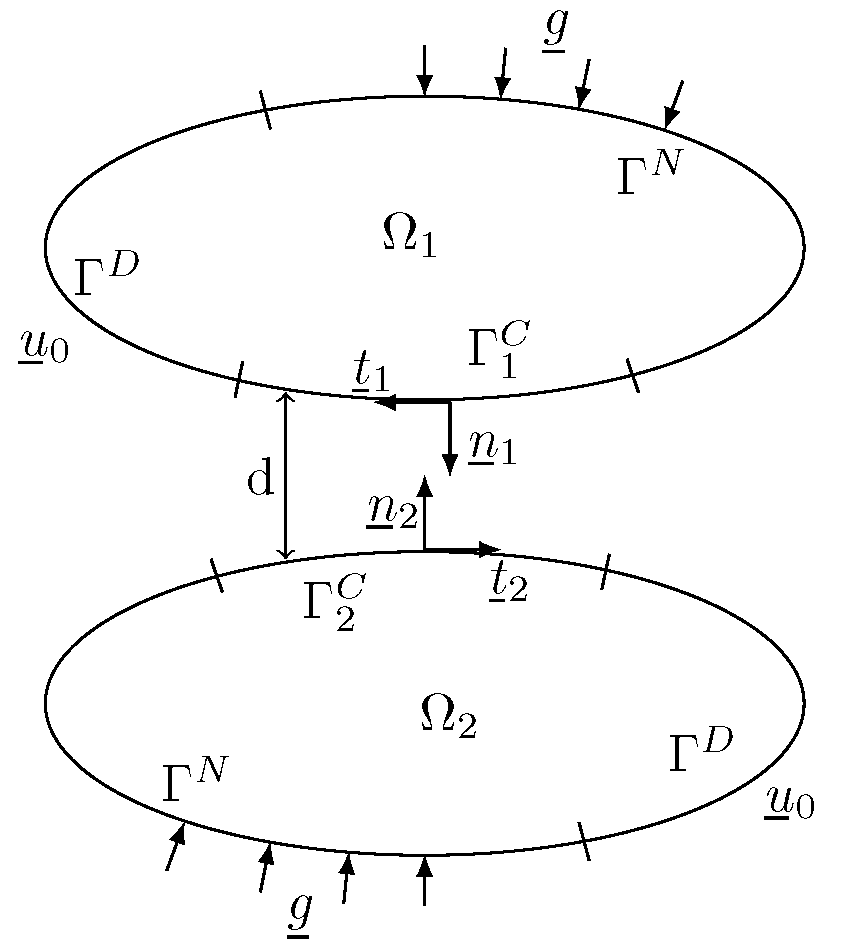
2.1. Static Unilateral Contact Problem
2.2. Finite Element Discretization
2.3. Hybrid Hyper-Reduced Model
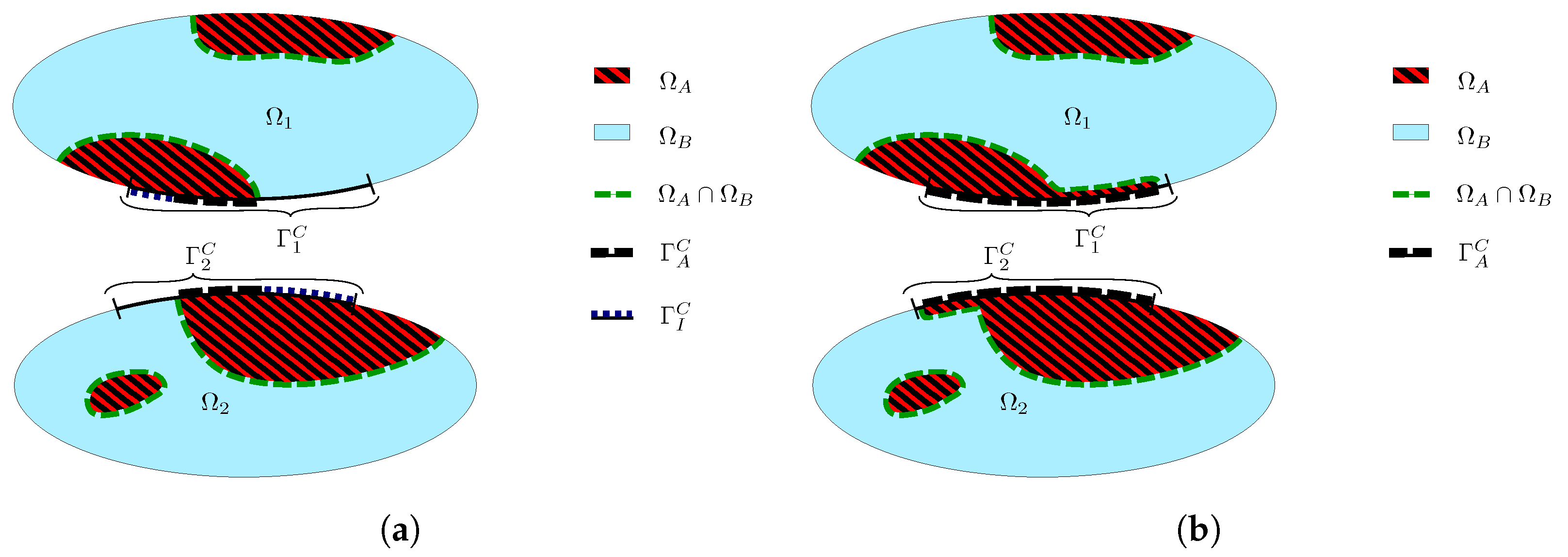
2.3.1. Reduced Integration Domain for Contact Problems
2.3.2. Reduced Bases
2.3.3. Hybrid Hyper-Reduced Formulation
3. Solvability Condition and Enrichment of the Primal Reduced Basis
3.1. Extended Solvability Condition
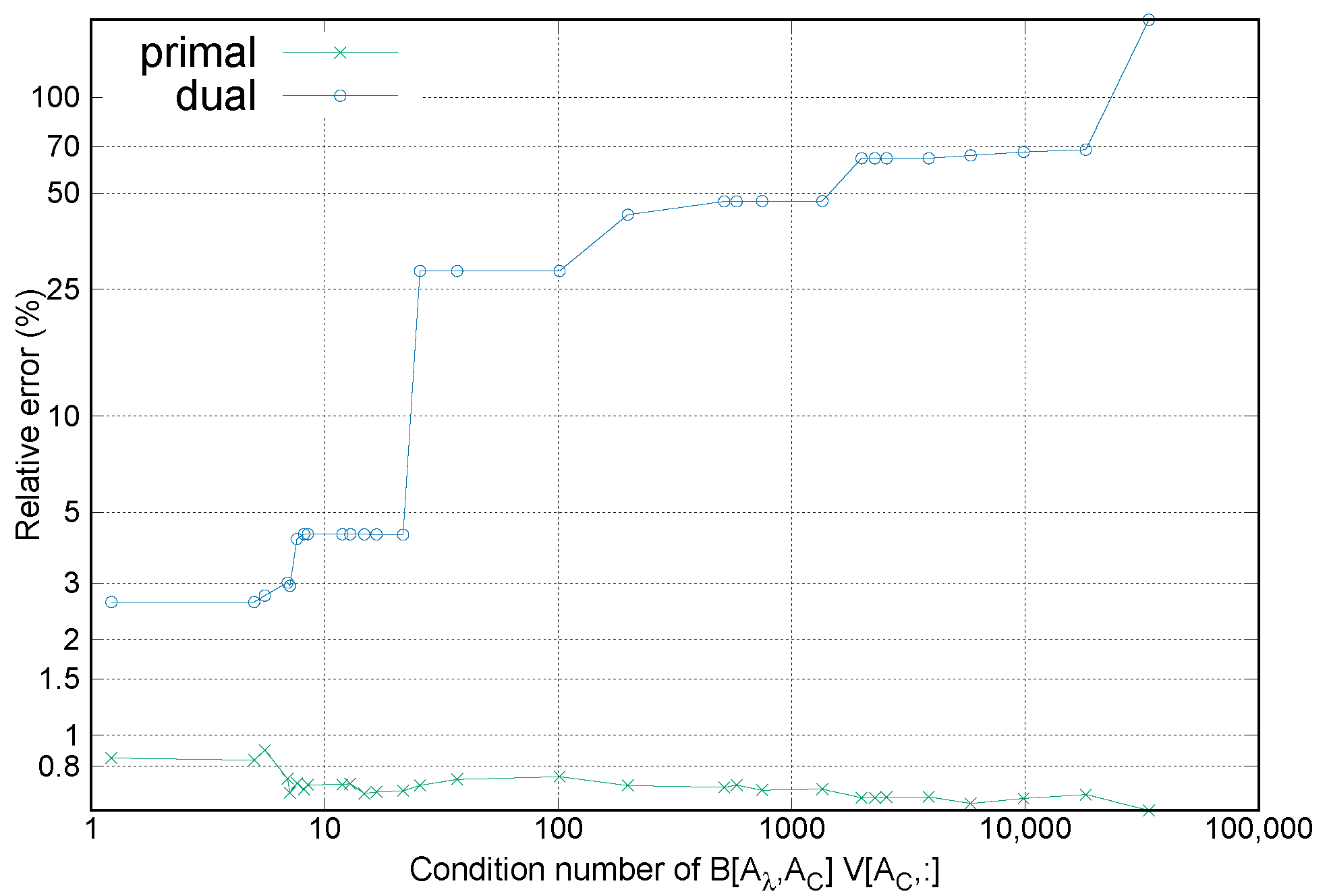
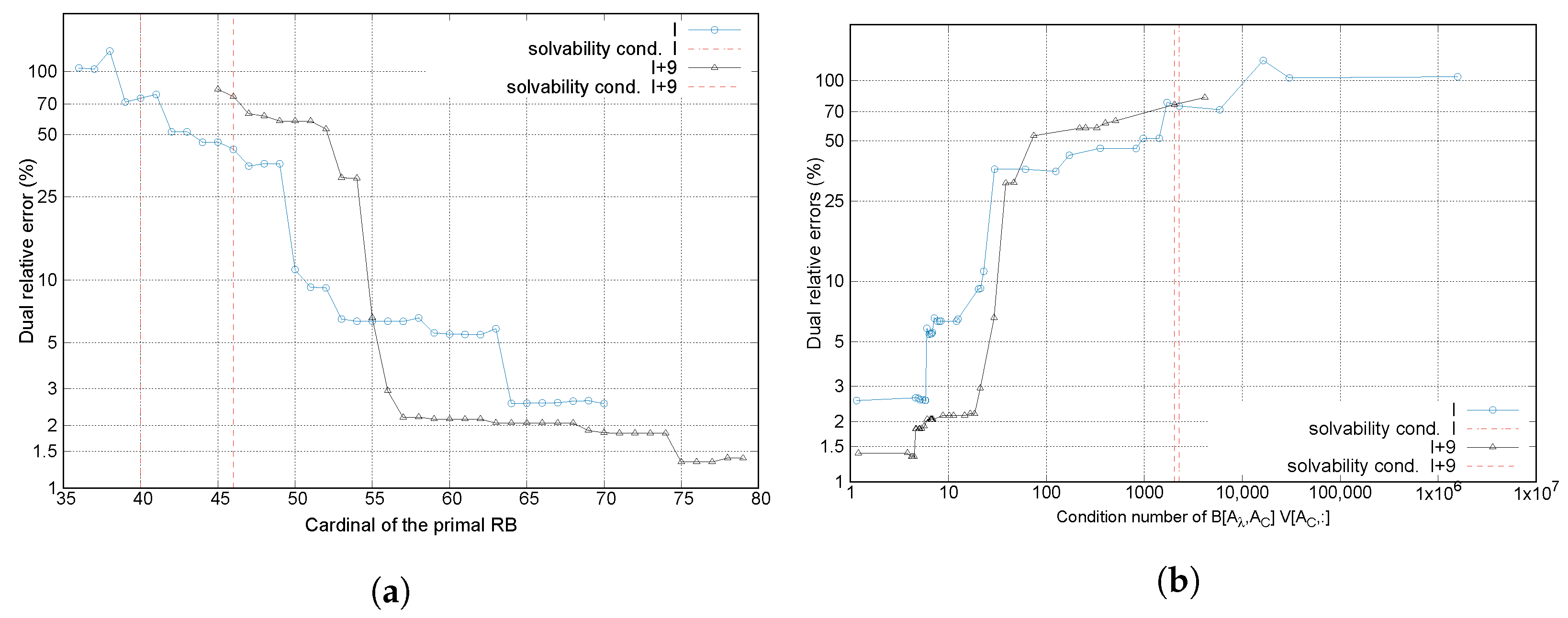
3.2. Importance of the Projected Contact Rigidity Matrix Condition Number
3.3. FE Enrichment of the Primal RB
| Algorithm 1: Greedy algorithm based on the condition number of the projected contact rigidity matrix to enrich the primal RB. |
 |
3.4. POD Modes and FE Shape Functions Enrichment of the Primal RB
4. Clustering
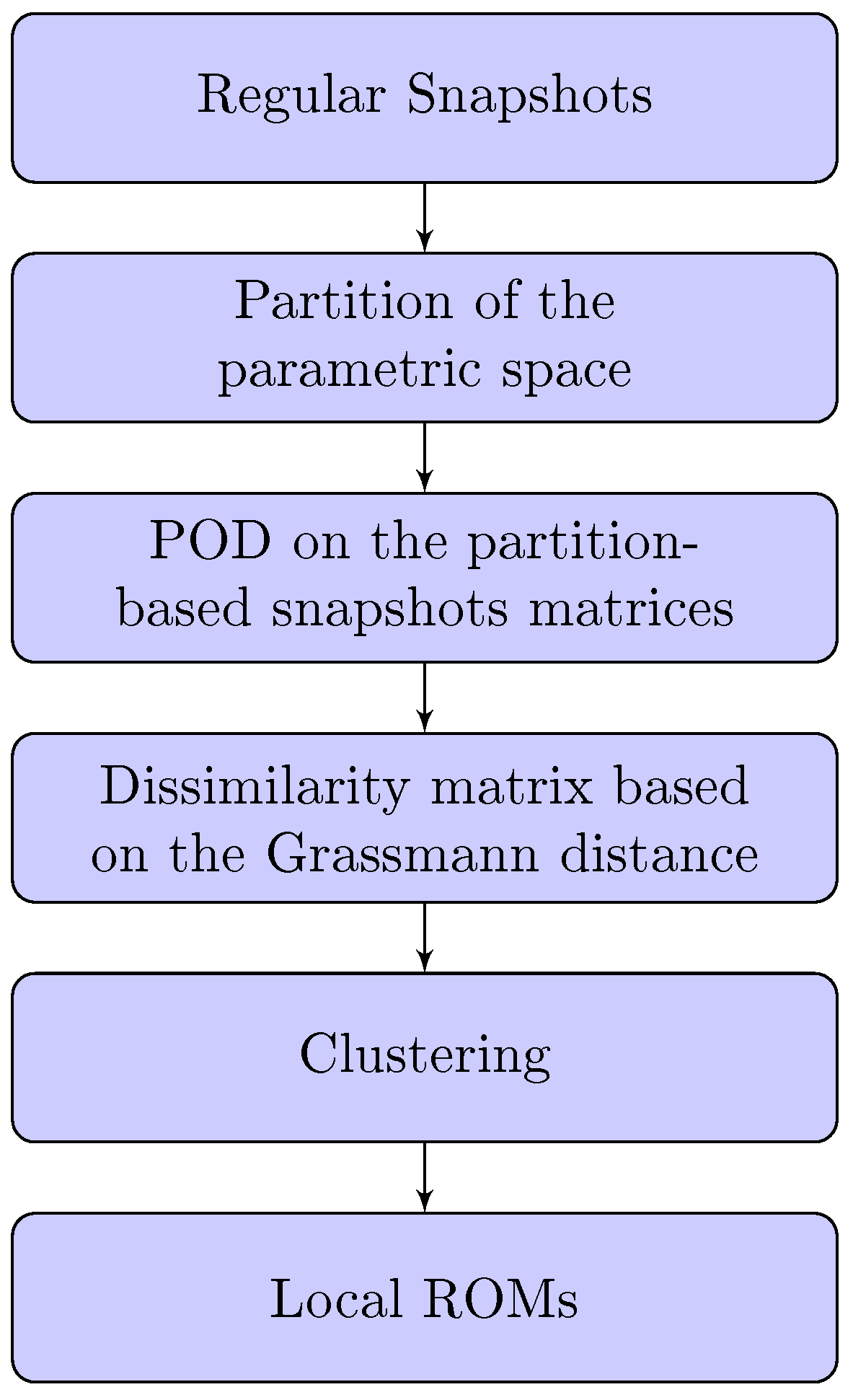
4.1. From Regular Snapshots
4.2. From Irregular Snapshots
5. Numerical Results
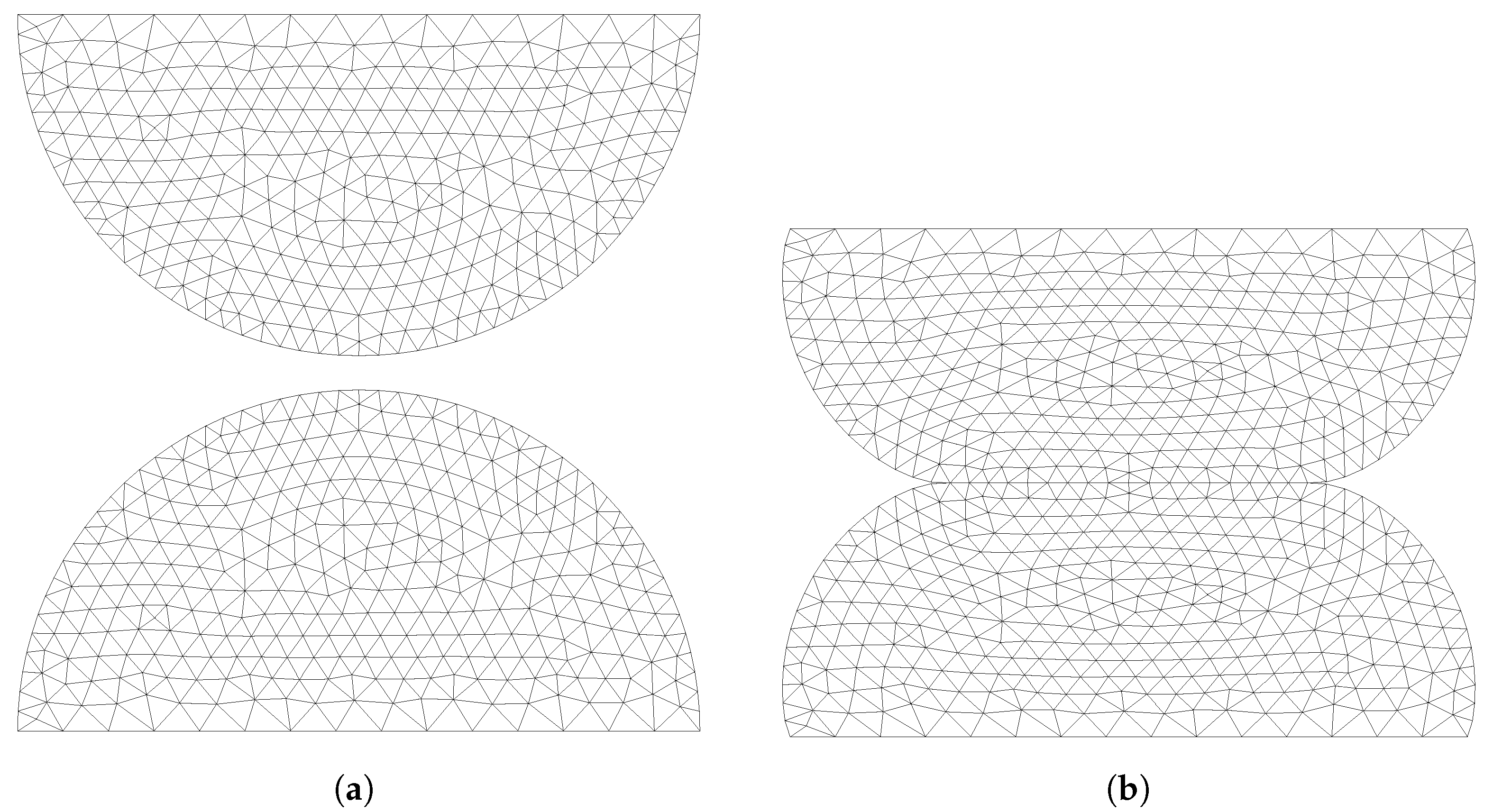
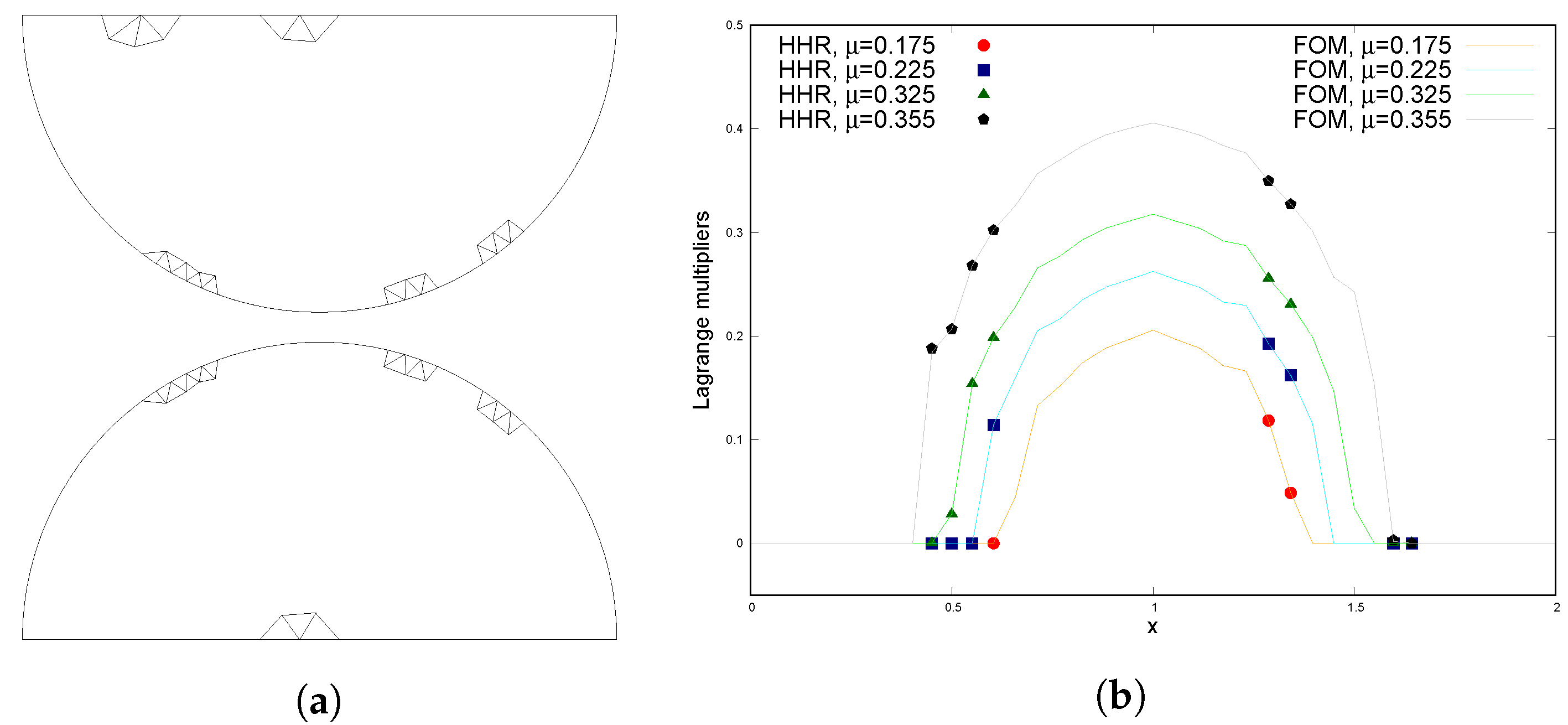
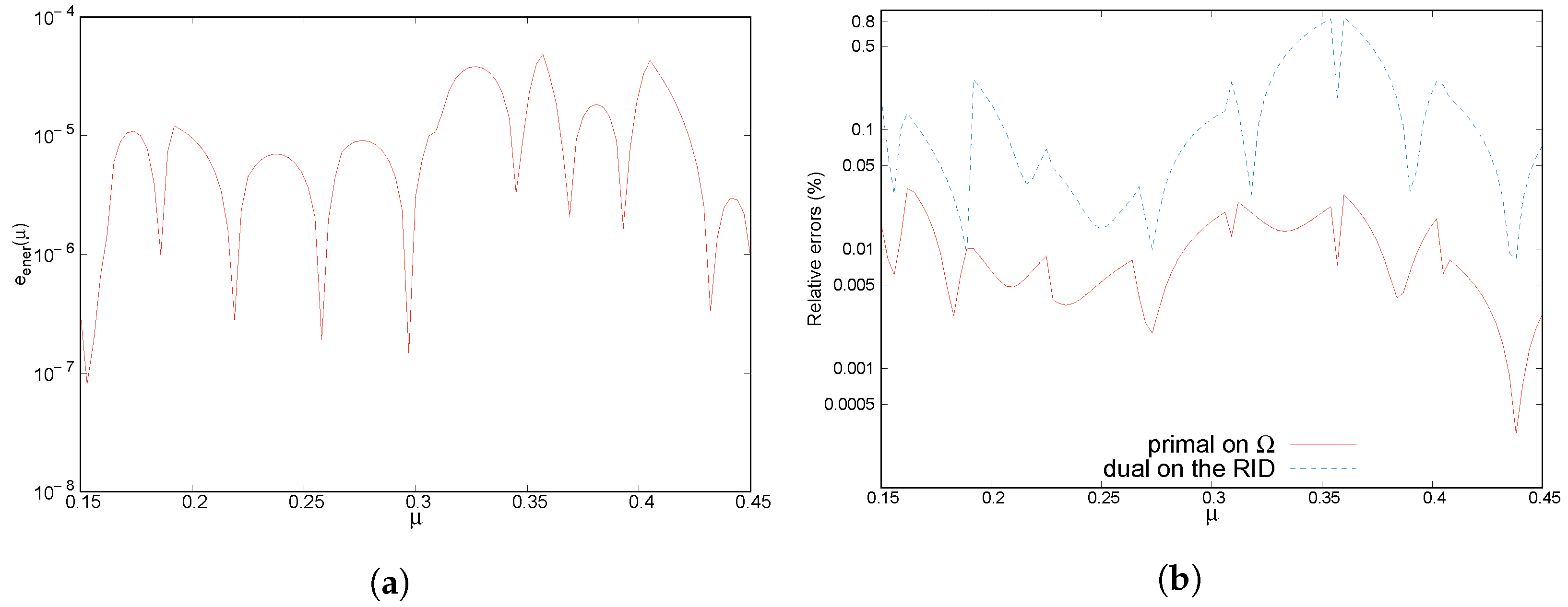
5.1. Test Case A: Half Disks of Hertz, Unidimensional Parametric Space
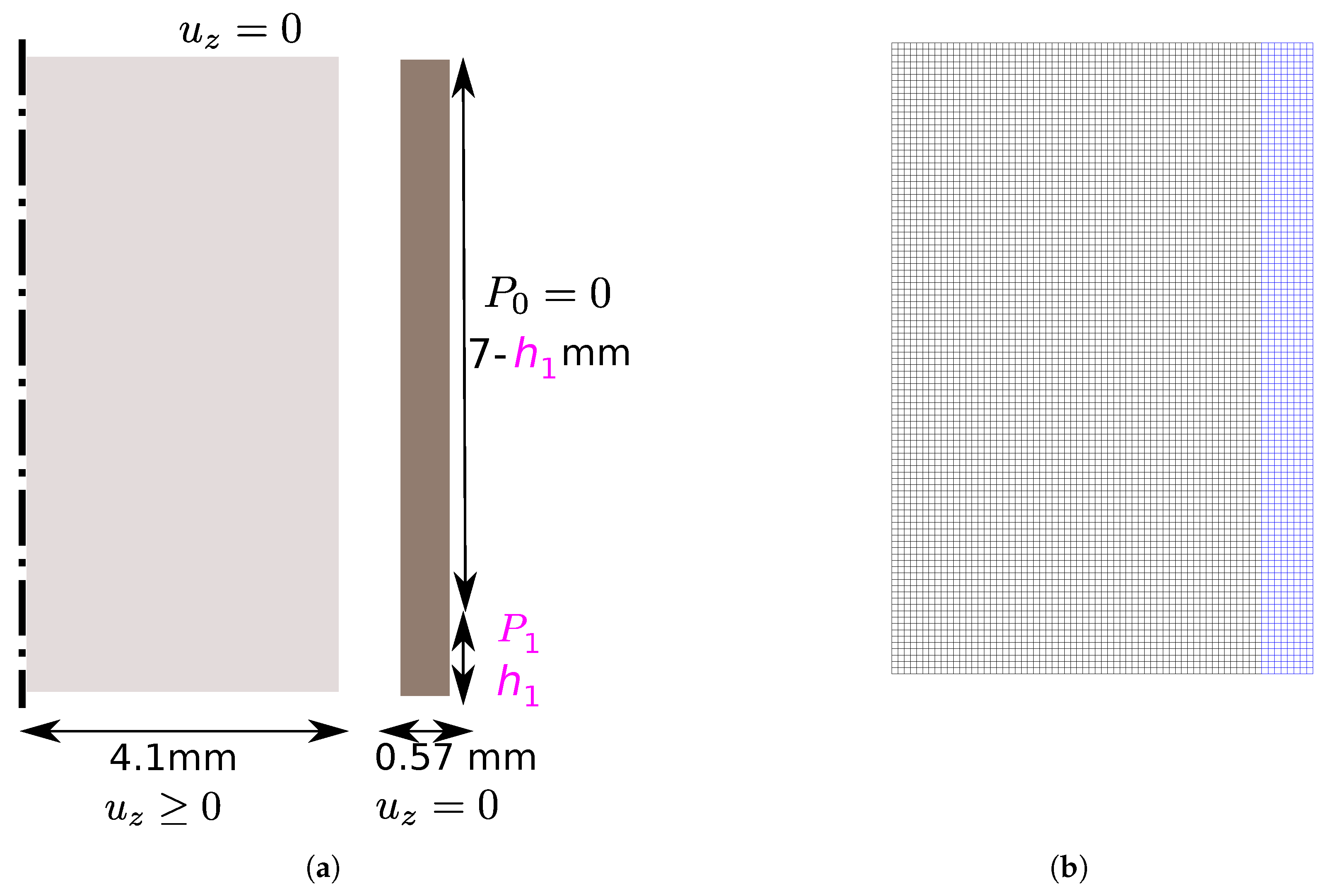
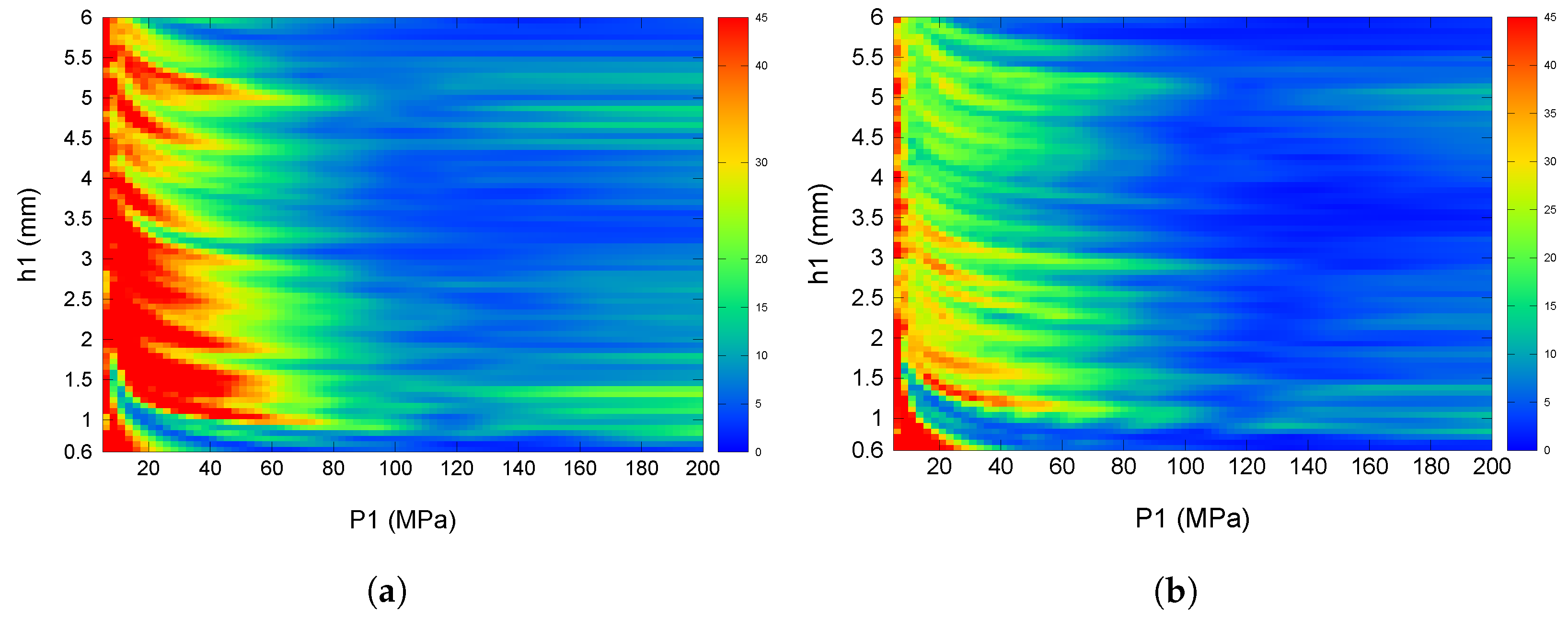
5.2. Test Case B: 2D Axisymmetric Contact—Bidimensional Parametric Space
5.2.1. Enrichment Strategies
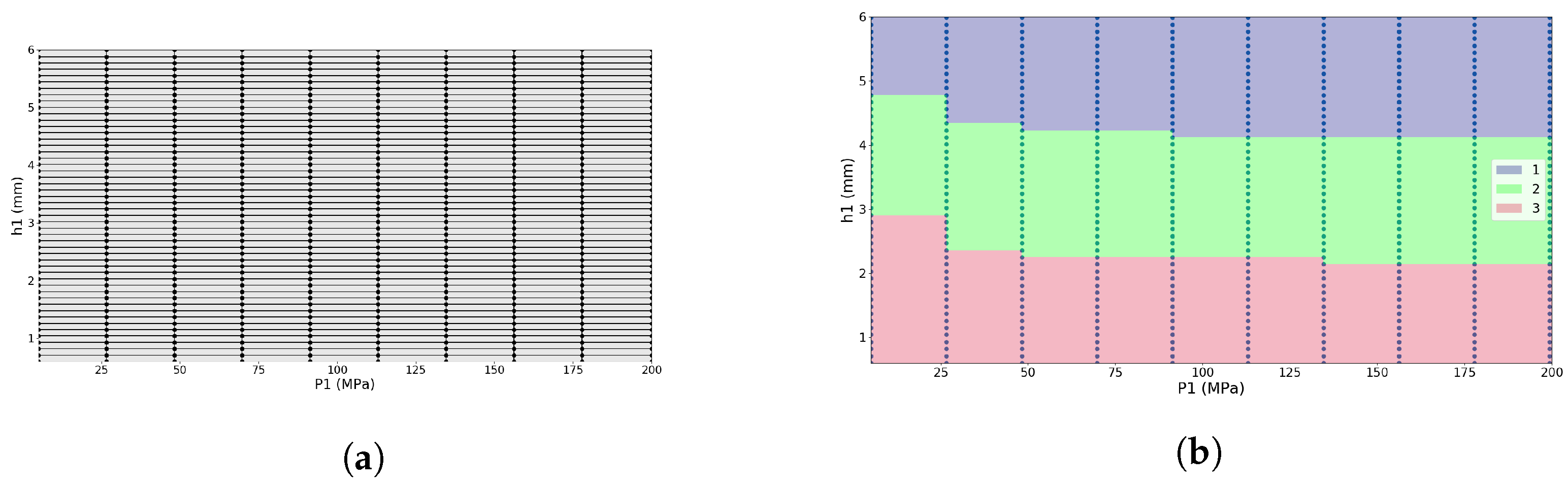
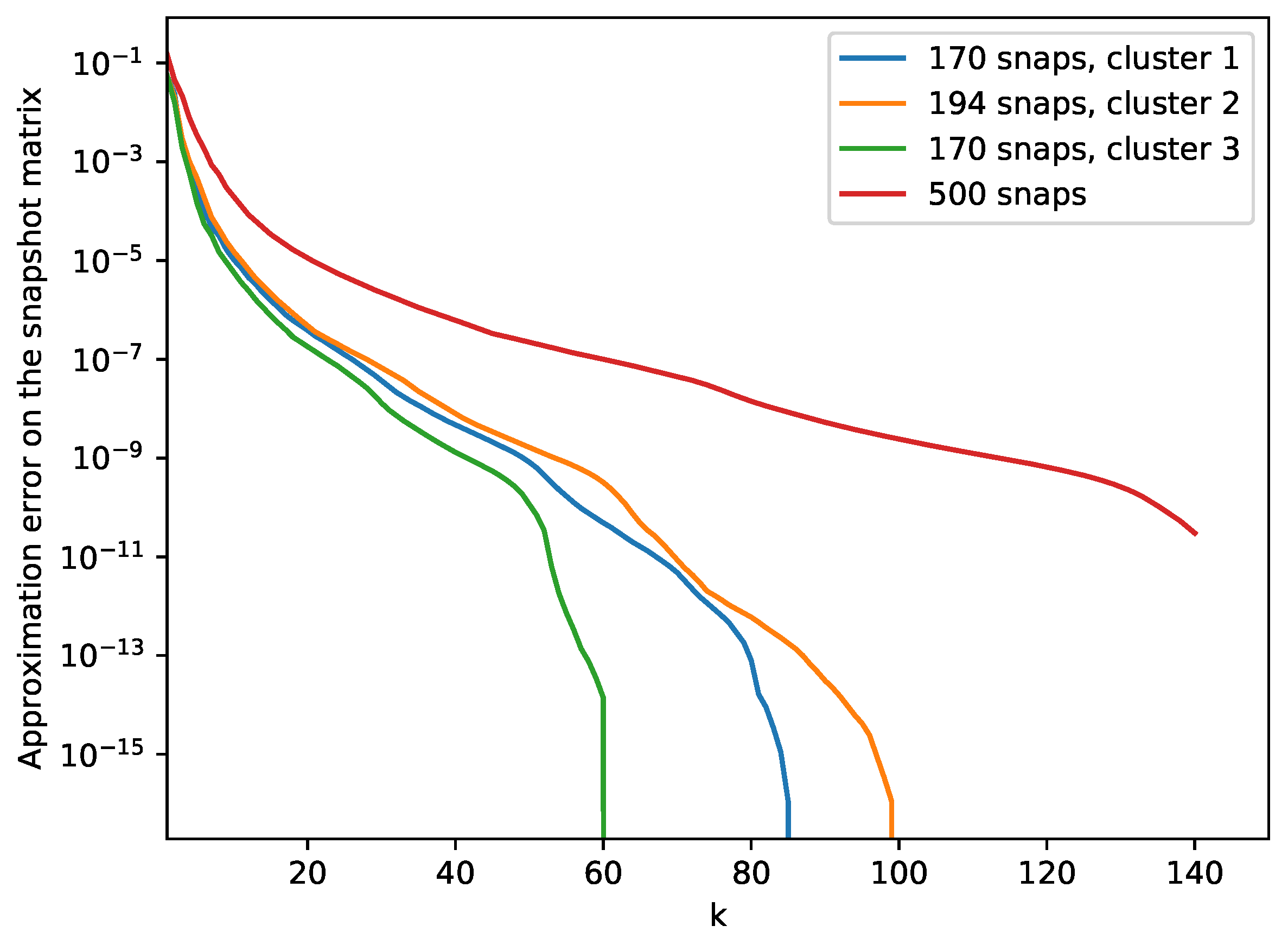
5.2.2. Clustering Strategies
From Regular Snapshots
From Irregular Snapshots
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Balajewicz, M.; Toivanen, J. Reduced order models for pricing European and American options under stochastic volatility and jump-diffusion models. J. Comput. Sci. 2017, 20, 198–204. [Google Scholar] [CrossRef]
- Bader, E.; Zhang, Z.; Veroy, K. An empirical interpolation approach to reduced basis approximations for variational inequalities. Math. Comput. Model. Dyn. Syst. 2016, 22, 345–361. [Google Scholar] [CrossRef]
- Scheffold, D.; Bach, C.; Duddeck, F.; Müller, G.; Buchschmid, M. Vibration Frequency Optimization of Jointed Structures with Contact Nonlinearities using Hyper-Reduction. IFAC-PapersOnLine 2018, 51, 843–848. [Google Scholar] [CrossRef]
- Ballani, J.; Huynh, D.B.P.; Knezevic, D.J.; Nguyen, L.; Patera, A.T. A component-based hybrid reduced basis/finite element method for solid mechanics with local nonlinearities. Comput. Methods Appl. Mech. Eng. 2018, 329, 498–531. [Google Scholar] [CrossRef]
- Giacoma, A.; Dureisseix, D.; Gravouil, A.; Rochette, M. A multiscale large time increment/FAS algorithm with time-space model reduction for frictional contact problems. Int. J. Numer. Methods Eng. 2014, 97, 207–230. [Google Scholar] [CrossRef] [Green Version]
- Giacoma, A.; Dureisseix, D.; Gravouil, A. An efficient quasi-optimal space-time PGD. Application to frictional contact mechanics. Adv. Model. Simul. Eng. Sci. 2016, 3, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Haasdonk, B.; Wohlmuth, B.; Salomon, J. A Reduced Basis Method for Parametrized Variational Inequalities. SIAM J. Numer. Anal. 2012, 50, 2656–2676. [Google Scholar] [CrossRef] [Green Version]
- Balajewicz, M.; Amsallem, D.; Farhat, C. Projection-based model reduction for contact problems. Int. J. Numer. Methods Eng. 2016, 106, 644–663. [Google Scholar] [CrossRef] [Green Version]
- Fauque, J.; Ramière, I.; Ryckelynck, D. Hybrid hyper-reduced modeling for contact mechanics problems. Int. J. Numer. Methods Eng. 2018, 115, 117–139. [Google Scholar] [CrossRef]
- Benaceur, A.; Ern, A.; Ehrlacher, V. A reduced basis method for parametrized variational inequalities applied to contact mechanics. Int. J. Numer. Methods Eng. 2019, 121, 1170–1197. [Google Scholar] [CrossRef]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. Comptes Rendus Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D.C. Nonlinear Model Reduction via Discrete Empirical Interpolation. SIAM J. Sci. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Astrid, P.; Weiland, S.; Willcox, K.; Backx, T. Missing Point Estimation in Models Described by Proper Orthogonal Decomposition. IEEE Trans. Autom. Control 2008, 53, 2237–2251. [Google Scholar] [CrossRef] [Green Version]
- Farhat, C.; Avery, P.; Chapman, T.; Cortial, J. Dimensional reduction of nonlinear finite element dynamic models with finite rotations and energy-based mesh sampling and weighting for computational efficiency. Int. J. Numer. Methods Eng. 2014, 98, 625–662. [Google Scholar] [CrossRef]
- Ryckelynck, D. Hyper-reduction of mechanical models involving internal variables. Int. J. Numer. Methods Eng. 2009, 77, 75–89. [Google Scholar] [CrossRef]
- Delhez, E.; Nyssen, F.; Golinval, J.C.; Batailly, A. Reduced order modeling of blades with geometric nonlinearities and contact interactions. J. Sound Vib. 2021, 500, 116037. [Google Scholar] [CrossRef]
- Manvelyan, D.; Simeon, B.; Wever, U. An efficient model order reduction scheme for dynamic contact in linear elasticity. Comput. Mech. 2021, 68, 1283–1295. [Google Scholar] [CrossRef]
- Daniel, T.; Casenave, F.; Akkari, N.; Ryckelynck, D. Model order reduction assisted by deep neural networks (ROM-net). Adv. Model. Simul. Eng. Sci. 2020, 7, 16. [Google Scholar] [CrossRef]
- Amsallem, D.; Zahr, M.; Washabaugh, K. Fast local reduced basis updates for the efficient reduction of nonlinear systems with hyper-reduction. Adv. Comput. Math. 2015, 41, 1187–1230. [Google Scholar] [CrossRef]
- Redeker, M.; Haasdonk, B. A POD-EIM reduced two-scale model for crystal growth. Adv. Comput. Math. 2015, 41, 987–1013. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Butnaru, D.; Willcox, K.; Bungartz, H.J. Localized Discrete Empirical Interpolation Method. SIAM J. Sci. Comput. 2014, 36, A168–A192. [Google Scholar] [CrossRef]
- Grimberg, S.; Farhat, C.; Tezaur, R.; Bou-Mosleh, C. Mesh sampling and weighting for the hyperreduction of nonlinear Petrov–Galerkin reduced-order models with local reduced-order bases. Int. J. Numer. Methods Eng. 2021, 122, 1846–1874. [Google Scholar] [CrossRef]
- Duvaut, G.; Lions, J.L. Inequalities in Mechanics and Physics; Springer Science & Business Media: Berlin, Germany, 1976. [Google Scholar] [CrossRef]
- Kikuchi, N.; Oden, J. Contact Problems in Elasticity: A Study of Variational Inequalities and Finite Element Methods; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1987. [Google Scholar]
- Wriggers, P. Computational Contact Mechanics; Springer Science: Berlin, Germany, 2006. [Google Scholar] [CrossRef]
- Babuška, I. The Finite Element Method with Lagrangian Multipliers. Numer. Math. 1973, 20, 179–192. [Google Scholar] [CrossRef]
- Brezzi, F. On the existence, uniqueness and approximation of saddle-point problems arising from Lagrangian multipliers. In ESAIM: Mathematical Modelling and Numerical Analysis—Modélisation Mathématique et Analyse Numérique; Cambridge University Press: Cambridge, UK, 1974; Volume 8, pp. 129–151. [Google Scholar] [CrossRef]
- El-Abbasi, N.; Bathe, K.J. Stability and patch test performance of contact discretizations and a new solution algorithm. Comput. Struct. 2001, 79, 1473–1486. [Google Scholar] [CrossRef] [Green Version]
- Sirovich, S. Turbulence and the dynamics of coherent structures. Parts I–III. Quart. Appl Math. 1987, 45, 561–590. [Google Scholar] [CrossRef] [Green Version]
- Ryckelynck, D.; Goessel, T.; Nguyen, F. Mechanical dissimilarity of defects in welded joints via Grassmann manifold and machine learning. Comptes Rendus. Mécanique 2020, 348, 911–935. [Google Scholar] [CrossRef]
- Park, H.; Jun, C. A simple and fast algorithm for K-medoids clustering. Expert Syst. Appl. 2009, 36, 3336–3341. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Cast3M. Available online: http://www-cast3m.cea.fr (accessed on 16 January 2022).
- Liu, H.; Ramière, I.; Lebon, F. On the coupling of local multilevel mesh refinement and ZZ methods for unilateral frictional contact problems in elastostatics. Comput. Methods Appl. Mech. Eng. 2017, 323, 1–26. [Google Scholar] [CrossRef] [Green Version]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MPa | MPa | |||||||
|---|---|---|---|---|---|---|---|---|
| mm | mm | |||||||
| nb POD | Rel. err. | Rel. err. | ||||||
| mod. add. | after POD enrich. | Final | Primal | Dual | Primal | Dual | ||
| FE Enr. | 0 | − | 1.5 × 10 | 70 | 1.0% | 2.5% | 2.9% | 21% |
| POD+FE Enr. | 3 | 7.5 | 2.3 × 10 | 73 | 2.5% | 1.8% | 0.5% | 26% |
| POD+FE Enr. | 6 | 5 | 4.5 × 10 | 76 | 0.5% | 1.6% | 1.6% | 16% |
| POD+FE Enr. | 9 | 3.5 | 4.1 × 10 | 79 | 0.1% | 1.3% | 3.5% | 5.6% |
| POD+FE Enr. | 12 | 2.7 | 3.4 × 10 | 82 | 1.4% | 1.7% | 2.5% | 6.7% |
| POD+FE Enr. | 15 | 2.2 | 878 | 85 | 1.9% | 1.7% | 1.3% | 5.8% |
| POD+FE Enr. | 18 | 1.7 | 386 | 88 | 1.1% | 1.4% | 0.2% | 5.3% |
| POD+FE Enr. | 21 | 1.3 | 383 | 91 | 7.8% | 1.8% | 13.4% | 9.3% |
| POD+FE Enr. | 23 | 1.1 | 330 | 93 | 0.8% | 1.3% | 16% | 9.9% |
| POD+FE Enr. | 26 | 0.9 | 328 | 96 | 12% | 1.3% | 1.5% | 9.5% |
| Cluster | Rel. err. | |||||
|---|---|---|---|---|---|---|
| Label | before FE enrich. | Initial | Final | Primal | Dual | |
| MPa mm | 2 | 1.5 × 10 | 39 | 79 | 0.03% | 2.0% |
| MPa mm | 1 | 2.2 × 10 | 31 | 67 | 0.02% | 2.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le Berre, S.; Ramière, I.; Fauque, J.; Ryckelynck, D. Condition Number and Clustering-Based Efficiency Improvement of Reduced-Order Solvers for Contact Problems Using Lagrange Multipliers. Mathematics 2022, 10, 1495. https://0-doi-org.brum.beds.ac.uk/10.3390/math10091495
Le Berre S, Ramière I, Fauque J, Ryckelynck D. Condition Number and Clustering-Based Efficiency Improvement of Reduced-Order Solvers for Contact Problems Using Lagrange Multipliers. Mathematics. 2022; 10(9):1495. https://0-doi-org.brum.beds.ac.uk/10.3390/math10091495
Chicago/Turabian StyleLe Berre, Simon, Isabelle Ramière, Jules Fauque, and David Ryckelynck. 2022. "Condition Number and Clustering-Based Efficiency Improvement of Reduced-Order Solvers for Contact Problems Using Lagrange Multipliers" Mathematics 10, no. 9: 1495. https://0-doi-org.brum.beds.ac.uk/10.3390/math10091495