Mathematical Model and Evaluation Function for Conflict-Free Warranted Makespan Minimization of Mixed Blocking Constraint Job-Shop Problems

Abstract
:1. Introduction and Targeted Contribution
2. Literature Review
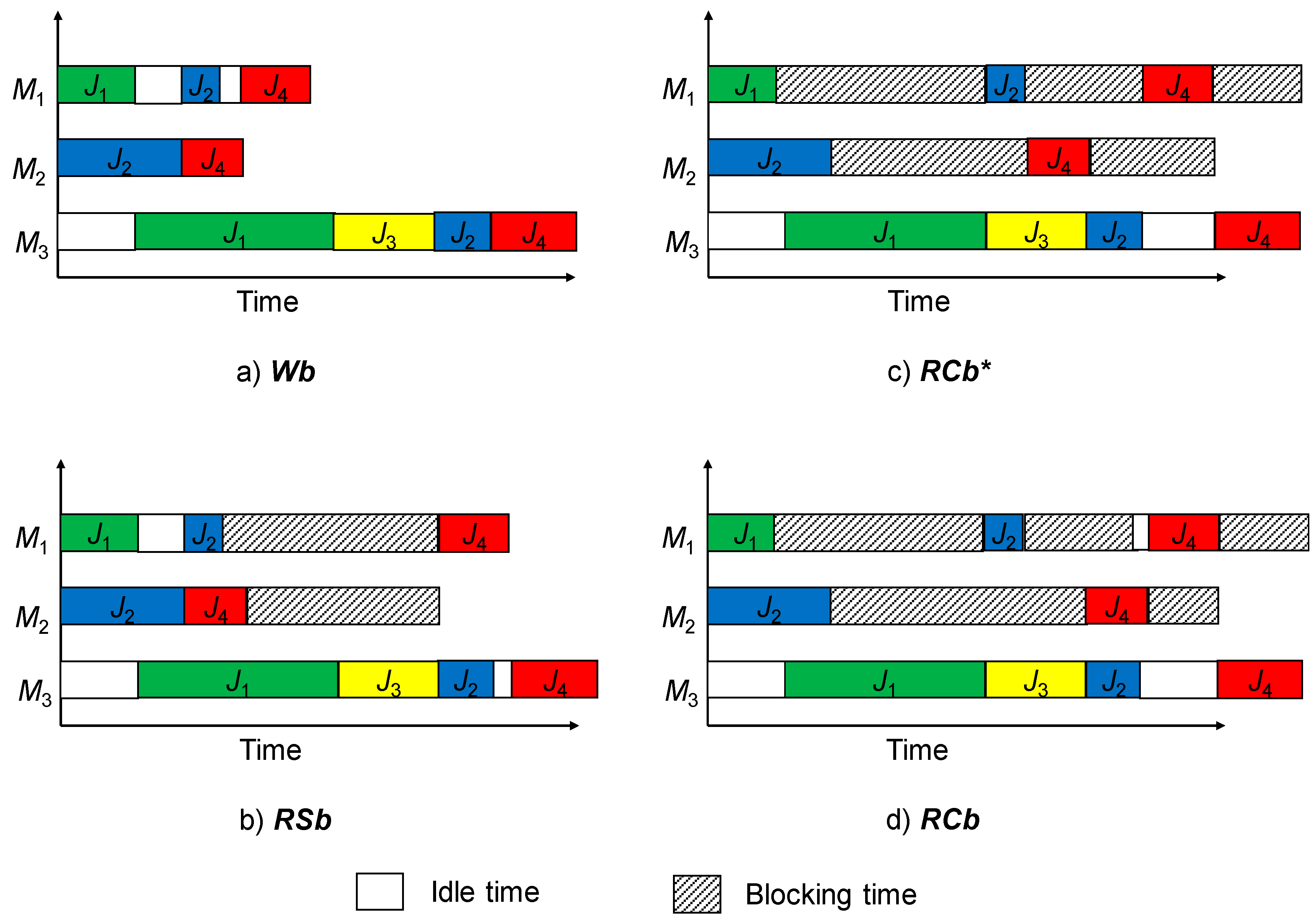
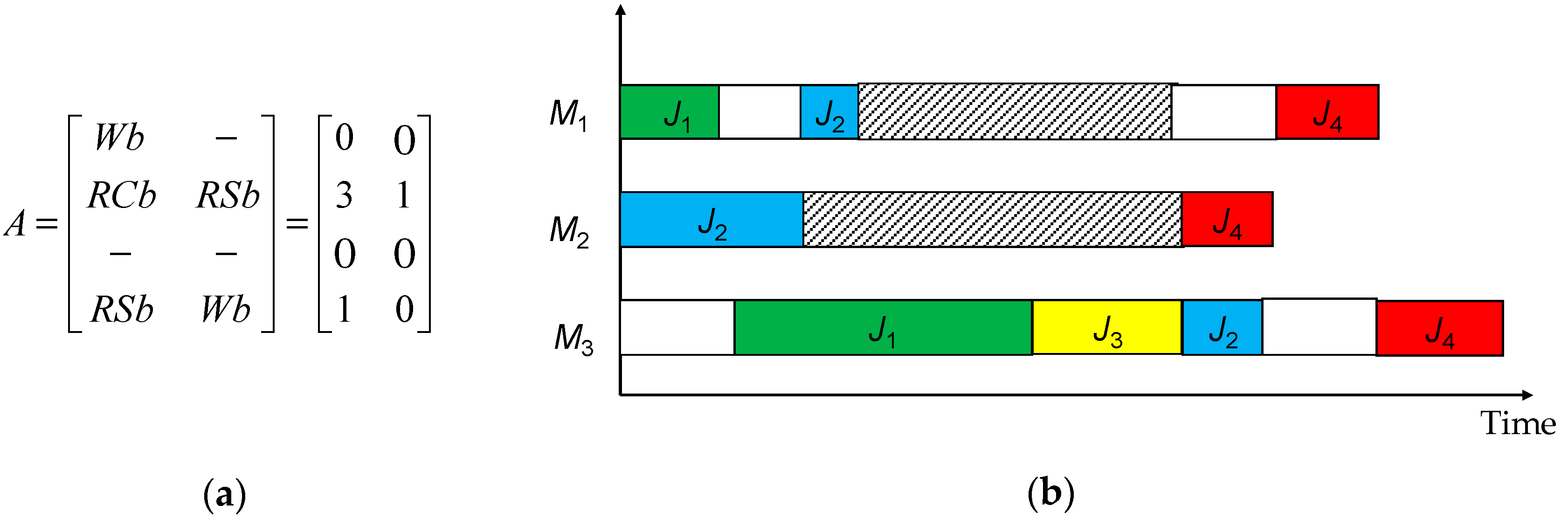
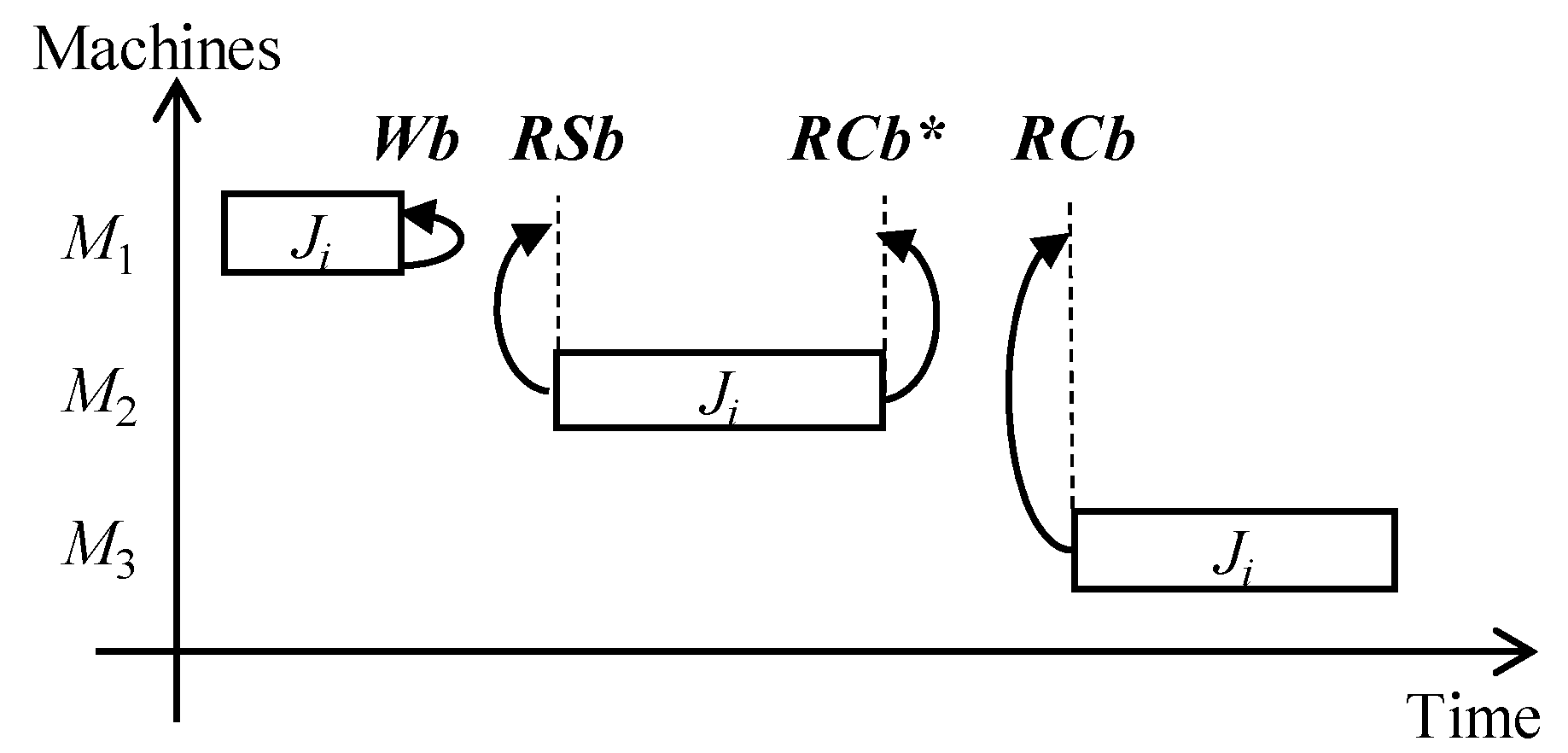
3. Problem Description
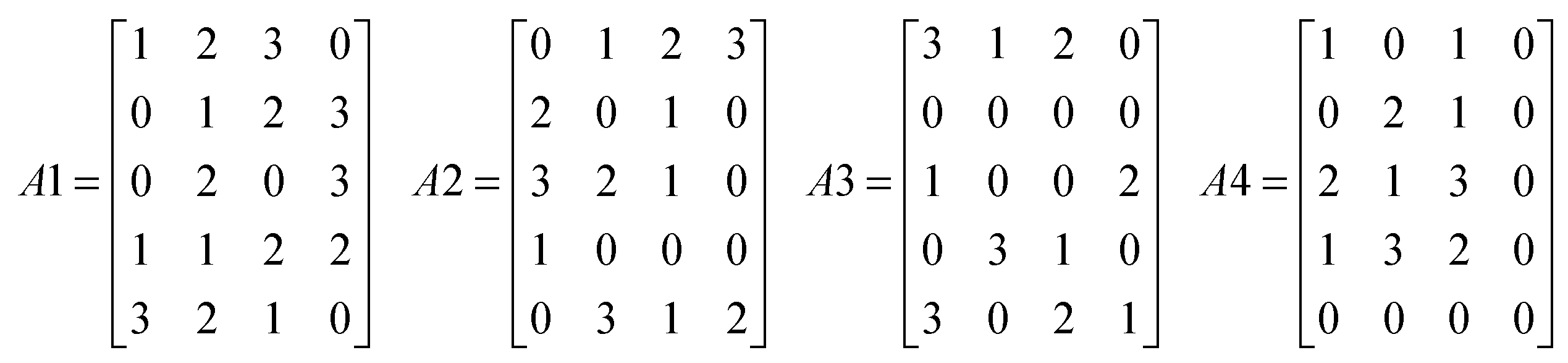
4. Mathematical Model
4.1. Parameters
4.2. Results Obtained on Mixed Blocking Constrained Jobshop Problems
5. Evaluation Function for Meta-Heuristics
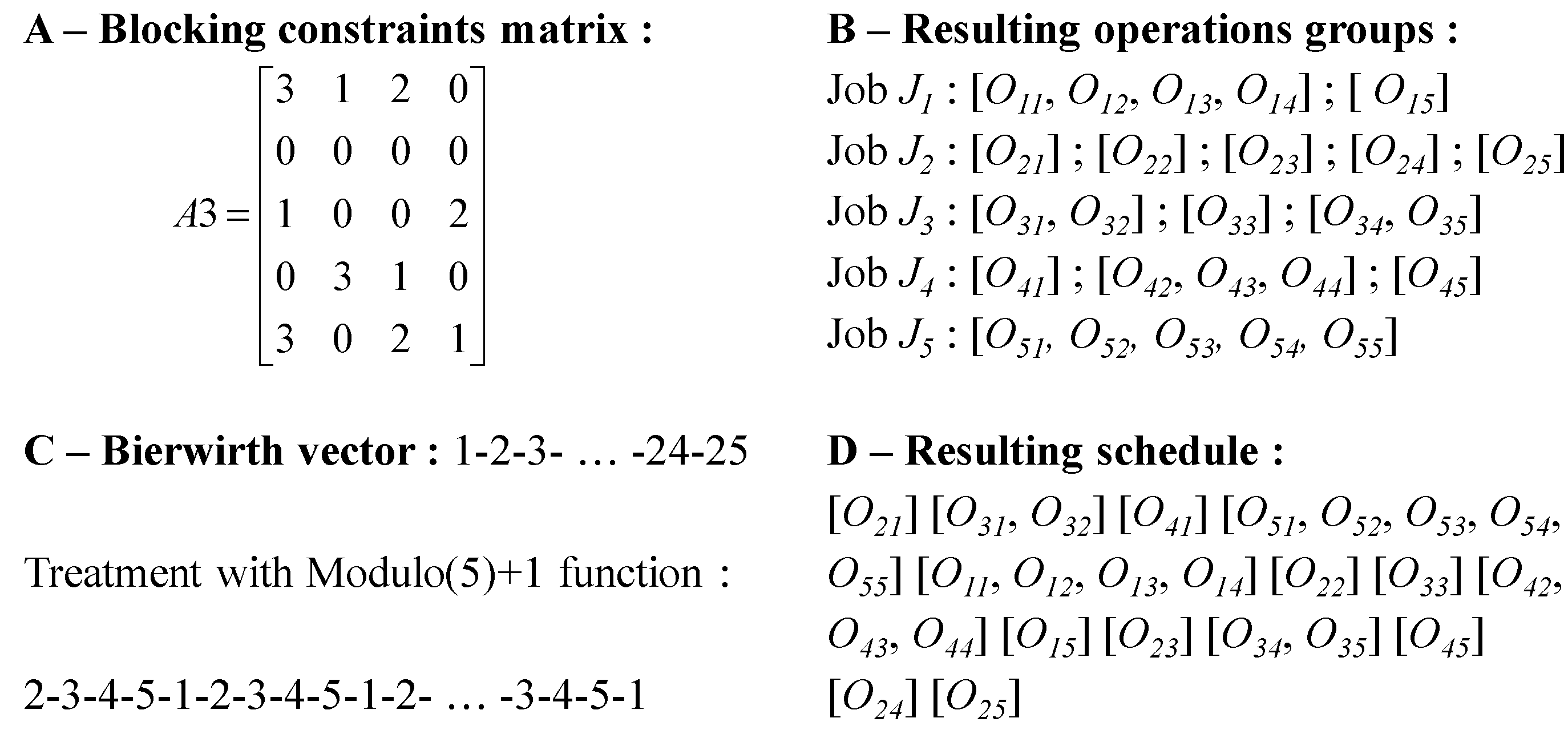
5.1. Bierwirth Vector
5.2. Evaluation Function
5.3. Meta-Heuristics Proposed
6. Benchmarks and Computing Results
7. Conclusions and Perspectives
Author Contributions
Funding
Conflicts of Interest
References
- Jackson, J.R. An extension of Johnson’s result on job lot scheduling. Nav. Res. Logist. Q. 1956, 3, 201–203. [Google Scholar] [CrossRef]
- Turker, A.; Aktepe, A.; Inal, A.; Ersoz, O.; Das, G.; Birgoren, B. A Decision Support System for Dynamic Job-Shop Scheduling Using Real-Time Data with Simulation. Mathematics 2019, 7, 278. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Yu, S.; Li, T. A Meta-Model-Based Multi-Objective Evolutionary Approach to Robust Job Shop Scheduling. Mathematics 2019, 7, 529. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Lin, L.; Li, H.; Gen, M. Cooperative Co-Evolution Algorithm with an MRF-Based Decomposition Strategy for Stochastic Flexible Job Shop Scheduling. Mathematics 2019, 7, 318. [Google Scholar] [CrossRef] [Green Version]
- Burdett, R.L.; Corry, P.; Yarlagadda, P.K.D.V.; Eustace, C.; Smith, S. A flexible job shop scheduling approach with operators for coal export terminals. Comput. Oper. Res. 2019, 104, 15–36. [Google Scholar] [CrossRef]
- Grabowski, J.; Pempera, J. Sequencing of jobs in some production system. Eur. J. Oper. Res. 2000, 125, 535–550. [Google Scholar] [CrossRef]
- Carlier, J.; Haouari, M.; Kharbeche, M.; Moukrim, A. An optimization-based heuristic for the robotic cell problem. Eur. J. Oper. Res. 2010, 202, 636–645. [Google Scholar] [CrossRef] [Green Version]
- Gong, H.; Tang, L.; Duin, C.W. A two-stage scheduling problem on a batching machine and a discrete machine with blocking and shared setup times. Comput. Oper. Res. 2010, 37, 960–969. [Google Scholar] [CrossRef]
- Chen, H.; Zhou, S.; Li, X.; Xu, R. A hybrid differential evolution algorithm for a two-stage flow shop on batch processing machines with arbitrary release times and blocking. Int. J. Prod. Res. 2014, 52, 5714–5734. [Google Scholar] [CrossRef]
- Burdett, R.L.; Kozan, E. The assignment of individual renewable resources in scheduling. Asia Pac. J. Oper. Res. 2004, 21, 355–377. [Google Scholar] [CrossRef] [Green Version]
- Martinez, S. Ordonnancement de Systèmes de Production avec Contraintes de Blocage. Ph.D. Thesis, Université de Nantes, Nantes, France, 2005. (In French). [Google Scholar]
- Trabelsi, W.; Sauvey, C.; Sauer, N. Heuristics and metaheuristics for mixed blocking constraints flowshop scheduling problems. Comput. Oper. Res. 2012, 39, 2520–2527. [Google Scholar] [CrossRef]
- Burdett, R.L.; Kozan, E. A sequencing approach for creating new train timetables. OR Spectr. 2010, 32, 163–193. [Google Scholar] [CrossRef] [Green Version]
- Jain, A.S.; Meeran, S. Deterministic Job-shop scheduling: Past, present and future. Eur. J. Oper. Res. 1999, 113, 393–434. [Google Scholar] [CrossRef]
- Blazewicz, J.; Domschke, W.; Pesch, E. The job shop scheduling problem. Eur. J. Oper. Res. 1996, 93, 1–33. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E. Scheduling trains as a blocking parallel-machine job shop scheduling problem. Comput. Oper. Res. 2009, 36, 2840–2852. [Google Scholar] [CrossRef] [Green Version]
- D’Ariano, A.; Samà, M.; D’Ariano, P.; Pacciarelli, D. Evaluating the applicability of advanced techniques for practical real-time train scheduling. Transp. Res. Procedia 2014, 3, 279–288. [Google Scholar] [CrossRef]
- Gafarov, E.; Werner, F. Two-Machine Job-Shop Scheduling with Equal Processing Times on Each Machine. Mathematics 2019, 7, 301. [Google Scholar] [CrossRef] [Green Version]
- Salido, M.A.; Escamilla, J.; Giret, A.; Barber, F. A genetic algorithm for energy-efficiency in job-shop scheduling. Int. J. Adv. Manuf. Technol. 2016, 85, 1303–1314. [Google Scholar] [CrossRef]
- Cheng, L.; Zhang, Q.; Tao, F.; Ni, K.; Cheng, Y. A novel search algorithm based on waterweeds reproduction principle for job shop scheduling problem. Int. J. Adv. Manuf. Technol. 2016, 84, 405–424. [Google Scholar] [CrossRef]
- Roshanaei, V.; Balagh, A.K.G.; Esfahani, M.M.S.; Vahdani, B. A mixed-integer linear programming model along with an electromagnetism-like algorithm for scheduling job shop production system with sequence-dependent set-up times. Int. J. Adv. Manuf. Technol. 2010, 47, 783–793. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, C.; Zhu, H.; Gu, J.; Deng, G. Energy-Efficient Scheduling for a Job Shop Using an Improved Whale Optimization Algorithm. Mathematics 2018, 6, 220. [Google Scholar] [CrossRef] [Green Version]
- Luan, F.; Cai, Z.; Wu, S.; Jiang, T.; Li, F.; Yang, J. Improved Whale Algorithm for Solving the Flexible Job Shop Scheduling Problem. Mathematics 2019, 7, 384. [Google Scholar] [CrossRef] [Green Version]
- Luan, F.; Cai, Z.; Wu, S.; Liu, S.; He, Y. Optimizing the Low-Carbon Flexible Job Shop Scheduling Problem with Discrete Whale Optimization Algorithm. Mathematics 2019, 7, 688. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zou, D.; Shen, X. A Novel Simple Particle swarm optimization Algorithm for Global Optimization. Mathematics 2018, 6, 287. [Google Scholar] [CrossRef] [Green Version]
- AitZai, A.; Boudhar, M. Parallel branch-and-bound and parallel PSO algorithms for job shop scheduling problem with blocking. Int. J. Oper. Res. 2013, 16, 14–37. [Google Scholar] [CrossRef]
- Xie, C.; Allen, T.T. Simulation and experimental design methods for job shop scheduling with material handling: A survey. Int. J. Adv. Manuf. Technol. 2015, 80, 233–243. [Google Scholar] [CrossRef]
- Fazlollahtabar, H.; Rezaie, B.; Kalantari, H. Mathematical programming approach to optimize material flow in an AGV-based flexible jobshop manufacturing system with performance analysis. Int. J. Adv. Manuf. Technol. 2010, 51, 1149–1158. [Google Scholar] [CrossRef]
- Woeginger, G.J. Inapproximability results for no-wait job shop scheduling. Oper. Res. Lett. 2004, 32, 320–325. [Google Scholar] [CrossRef]
- Groeflin, H.; Klinkert, A. A new neighborhood and tabu search for the blocking jobshop. Discret. Appl. Math. 2009, 157, 3643–3655. [Google Scholar] [CrossRef] [Green Version]
- Oddi, A.; Rasconi, R.; Cesta, A.; Smith, S. Iterative improvement algorithms for the blocking jobshop. In Proceedings of the 22nd International Conference on Automated Planning and Scheduling, Atibaia, São Paulo, Brazil, 25–19 June 2012; AAAI Press: Palo Alto, CA, USA, 2012; pp. 199–207. [Google Scholar]
- Pranzo, M. and Pacciarelli, D. An iterated greedy metaheuristic for the blocking job shop scheduling problem. J. Heuristics 2016, 22, 587–611. [Google Scholar] [CrossRef]
- Trabelsi, W.; Sauvey, C.; Sauer, N. Heuristic methods for problems with blocking constraints solving jobshop scheduling. In Proceedings of the 8th International Conference on Modelling and Simulation, Hammamet, Tunisia, 10–12 May 2010; Lavoisier: Paris, France, 2010. [Google Scholar]
- Dabah, A.; Bendjoudi, A.; AitZai, A.; Taboudjemat, N.N. Efficient parallel tabu search for the blocking job shop scheduling problem. Soft Comput. 2019, 23, 13283–13295. [Google Scholar] [CrossRef]
- Mati, Y.; Rezg, N.; Xie, X. A taboo search approach for deadlock-free scheduling of automated manufacturing systems. J. Intell. Manuf. 2001, 12, 535–552. [Google Scholar] [CrossRef]
- Bürgy, R. A neighborhood for complex job shop scheduling problems with regular objectives. J. Sched. 2017, 20, 391–422. [Google Scholar] [CrossRef]
- Lange, J.; Werner, F. On Neighborhood Structures and Repair Techniques for Blocking Job Shop Scheduling Problems. Algorithms 2019, 12, 242. [Google Scholar] [CrossRef] [Green Version]
- Gorine, A.; Sauvey, C.; Sauer, N. Mathematical Model and Lower Bounds for Multi Stage Job-shop Scheduling Problem with Special Blocking Constraints. In Proceedings of the 14th IFAC Symposium on Information Control Problems in Manufacturing, Bucharest, Romania, 23–25 May 2012; Borangiu, T., Dumitrache, I., Dolgui, A., Filip, F., Eds.; Elsevier Science: Amsterdam, The Netherlands, 2012; pp. 87–92. [Google Scholar]
- Lawrence, S. Supplement to Resource Constrained Project Scheduling: An Experimental Investigation of Heuristic Scheduling Techniques; Graduate School of Industrial Administration, Carnegie-Mellon University: Pittsburgh, PA, USA, 1984. [Google Scholar]
- Holland, J.H. Outline for logical theory of adaptive systems. J. Assoc. Comput. Mach. 1962, 3, 297–314. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Piscataway, NJ, USA, 27 November–1 December 1995; University of Western Australia: Pearth, Australia, 1995; pp. 1942–1948. [Google Scholar]
- Bierwirth, C. A generalized permutation approach to job-shop scheduling with genetic algorithms. OR Spektrum 1995, 17, 87–92. [Google Scholar] [CrossRef]
- Burdett, R.L.; Kozan, E. A disjunctive graph model and framework for constructing new train schedules. Eur. J. Oper. Res. 2010, 200, 85–98. [Google Scholar] [CrossRef]
- Gonçalves, J.F.; de Magalhăes Mendes, J.J.; Resend, M.G.C. A hybrid genetic algorithm for the job shop scheduling problem. Eur. J. Oper. Res. 2005, 167, 77–95. [Google Scholar] [CrossRef] [Green Version]
- Sauvey, C.; Sauer, N. A genetic algorithm with genes-association recognition for flowshop scheduling problems. J. Intell. Manuf. 2012, 23, 1167–1177. [Google Scholar] [CrossRef]
- Eberhart, R.; Shi, Y. Comparison between genetic algorithms and particle swarm optimization. Lect. Notes Comput. Sci. 1998, 1447, 611–616. [Google Scholar]
- Xia, W.J.; Wu, Z.M. A hybrid particle swarm optimization approach for the jobshop scheduling problem. Int. J. Adv. Manuf. Technol. 2006, 29, 360–366. [Google Scholar] [CrossRef]
- Wong, T.C.; Ngan, S.C. A comparison of hybrid genetic algorithm and hybrid particle swarm optimization to minimize makespan for assembly job shop. Appl. Soft Comput. 2013, 13, 1391–1399. [Google Scholar] [CrossRef]
- Eftekharian, S.E.; Shojafar, M.; Shamshirband, S. 2-Phase NSGA II: An Optimized Reward and Risk Measurements Algorithm in Portfolio Optimization. Algorithms 2017, 10, 130. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jobs | Machines | Blocking Constraints | |||
|---|---|---|---|---|---|
| A1 | A2 | A3 | A4 | ||
| 5 | 5 | 0.04 | 0.03 | 0.02 | 0.04 |
| 10 | 5 | 67.77 | 33.78 | 47.44 | 40.37 |
| 10 | 10 | 1174.30 | 618.32 | 605.60 | 84.9 |
| 15 | 5 | >1 h | >1 h | >1 h | >1 h |
| j | m | Meta-Heuristic | Parameters | A1 | A2 | A3 | A4 |
|---|---|---|---|---|---|---|---|
| 5 | 5 | PSO | ctbvi = 10; nb_indiv = 10 | 22.7 | 9.6 | 10.4 | 21.5 |
| PSO | ctbvi = 100; nb_indiv = 100 | 14.8 | 5.8 | 5.2 | 17.0 | ||
| GA | ctbvi = 100; nb_indiv = 100 | 12.6 | 2.4 | 2.3 | 12.3 | ||
| 10 | 5 | PSO | ctbvi = 10; nb_indiv = 10 | 63.3 | 59.2 | 52.4 | 66.2 |
| PSO | ctbvi = 100; nb_indiv = 100 | 49.0 | 47.6 | 40.3 | 51.6 | ||
| GA | ctbvi = 100; nb_indiv = 100 | 40.8 | 33.3 | 30.8 | 22.7 |
| j | m | GA (%) | GA (s) | PSO (%) | PSO (s) |
|---|---|---|---|---|---|
| 10 | 5 | 5.91 | 0.6 | 9.47 | 2.0 |
| 10 | 10 | 8.24 | 1.6 | 12.88 | 6.6 |
| 15 | 5 | 1.28 | 1.2 | 3.17 | 4.2 |
| 15 | 10 | 16.59 | 3.4 | 19.90 | 16.8 |
| 15 | 15 | 14.56 | 8.4 | 18.71 | 39.2 |
| 20 | 5 | 0.31 | 2.4 | 2.54 | 6.4 |
| 20 | 10 | 16.06 | 8.0 | 18.91 | 26.6 |
| 30 | 10 | 5.60 | 13.8 | 9.26 | 77.2 |
| Average: | 8.57 | 11.86 | |||
| j | m | Blocking Matrix | Execution Time | j | m | Blocking Matrix | Execution Time | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A1 | A2 | A3 | A4 | A1 | A2 | A3 | A4 | A1 | A2 | A3 | A4 | A1 | A2 | A3 | A4 | ||||
| 10 | 5 | 1512 | 1167 | 1217 | 1127 | 3 | 7 | 3 | 4 | 30 | 10 | 7792 | 5101 | 5295 | 4421 | 53 | 67 | 63 | 88 |
| 10 | 5 | 1503 | 1140 | 1172 | 1086 | 5 | 3 | 4 | 3 | 30 | 10 | 8204 | 5742 | 5289 | 4836 | 83 | 58 | 79 | 121 |
| 10 | 5 | 1278 | 1050 | 1086 | 1004 | 2 | 7 | 2 | 2 | 30 | 10 | 7814 | 5126 | 4949 | 4819 | 43 | 94 | 161 | 53 |
| 10 | 5 | 1212 | 1025 | 973 | 903 | 4 | 3 | 7 | 4 | 30 | 10 | 7710 | 5545 | 4842 | 4630 | 49 | 43 | 75 | 150 |
| 10 | 5 | 1189 | 945 | 864 | 872 | 3 | 3 | 5 | 3 | 30 | 10 | 7657 | 4700 | 5083 | 4945 | 48 | 165 | 143 | 82 |
| 10 | 10 | 2524 | 1679 | 1983 | 1827 | 8 | 11 | 9 | 6 | 30 | 15 | 8101 | 6097 | 5505 | 5029 | 102 | 43 | 368 | 306 |
| 10 | 10 | 2296 | 1722 | 1611 | 1437 | 6 | 8 | 7 | 9 | 30 | 15 | 7988 | 5291 | 5563 | 4991 | 68 | 239 | 256 | 384 |
| 10 | 10 | 2434 | 1569 | 1834 | 1692 | 19 | 9 | 14 | 6 | 30 | 15 | 7552 | 5767 | 5668 | 4884 | 198 | 133 | 89 | 179 |
| 10 | 10 | 2605 | 1819 | 1762 | 1812 | 15 | 8 | 18 | 6 | 30 | 15 | 8163 | 5336 | 5681 | 4962 | 87 | 196 | 120 | 193 |
| 10 | 10 | 2704 | 1689 | 1750 | 1676 | 6 | 11 | 6 | 17 | 30 | 15 | 8186 | 5486 | 5893 | 4993 | 80 | 241 | 130 | 307 |
| 15 | 5 | 2173 | 1718 | 1644 | 1546 | 8 | 5 | 4 | 4 | 30 | 20 | 8143 | 6261 | 5853 | 5776 | 302 | 186 | 420 | 243 |
| 15 | 5 | 1938 | 1527 | 1364 | 1456 | 12 | 5 | 12 | 10 | 30 | 20 | 8220 | 6060 | 6058 | 5435 | 139 | 334 | 285 | 399 |
| 15 | 5 | 2101 | 1649 | 1628 | 1441 | 10 | 8 | 9 | 11 | 30 | 20 | 7783 | 5917 | 6195 | 5653 | 302 | 186 | 420 | 243 |
| 15 | 5 | 2229 | 1772 | 1686 | 1667 | 7 | 6 | 9 | 11 | 30 | 20 | 8252 | 6063 | 6002 | 5462 | 338 | 382 | 393 | 251 |
| 15 | 5 | 1888 | 1741 | 1544 | 1576 | 12 | 5 | 5 | 10 | 30 | 20 | 7785 | 6017 | 6422 | 5452 | 292 | 194 | 443 | 275 |
| 15 | 10 | 3852 | 2548 | 2644 | 2546 | 19 | 17 | 26 | 18 | 50 | 15 | 12,195 | 10,046 | 9615 | 8598 | 359 | 560 | 523 | 469 |
| 15 | 10 | 3592 | 2431 | 2232 | 2487 | 20 | 14 | 18 | 15 | 50 | 15 | 12,184 | 9812 | 9094 | 8165 | 230 | 796 | 420 | 390 |
| 15 | 10 | 3783 | 2640 | 2779 | 2321 | 25 | 15 | 17 | 11 | 50 | 15 | 11,672 | 9767 | 8946 | 8451 | 430 | 613 | 351 | 648 |
| 15 | 10 | 3720 | 2471 | 2430 | 2504 | 36 | 14 | 18 | 27 | 50 | 15 | 11,977 | 9512 | 9712 | 7647 | 658 | 898 | 414 | 976 |
| 15 | 10 | 3749 | 2572 | 2358 | 2310 | 48 | 25 | 29 | 23 | 50 | 15 | 12,108 | 9827 | 8893 | 8116 | 545 | 251 | 653 | 832 |
| 15 | 15 | 5455 | 3680 | 3390 | 3508 | 31 | 31 | 36 | 29 | 50 | 20 | 13,105 | 10,386 | 10,090 | 9291 | 556 | 1935 | 829 | 741 |
| 15 | 15 | 6445 | 3874 | 3708 | 3911 | 32 | 32 | 16 | 44 | 50 | 20 | 12,582 | 10,737 | 9616 | 8860 | 754 | 681 | 796 | 981 |
| 15 | 15 | 5741 | 3019 | 3357 | 3214 | 61 | 50 | 61 | 42 | 50 | 20 | 12,705 | 9823 | 10,344 | 8852 | 747 | 1671 | 327 | 1335 |
| 15 | 15 | 5404 | 3525 | 3349 | 3527 | 31 | 22 | 44 | 50 | 50 | 20 | 12,579 | 10,399 | 9981 | 9312 | 902 | 717 | 714 | 981 |
| 15 | 15 | 5856 | 3485 | 3371 | 3761 | 21 | 42 | 35 | 47 | 50 | 20 | 13,342 | 9943 | 9914 | 8850 | 276 | 1231 | 1349 | 1452 |
| 20 | 5 | 2798 | 2209 | 2153 | 2134 | 12 | 15 | 11 | 10 | 100 | 20 | 22,632 | 22,363 | 20,972 | 18,108 | 5547 | 2517 | 3130 | 3251 |
| 20 | 5 | 2545 | 1915 | 1840 | 1785 | 8 | 15 | 21 | 15 | 100 | 20 | 23,598 | 21,479 | 20,796 | 17,913 | 3886 | 7498 | 4863 | 7111 |
| 20 | 5 | 2725 | 2235 | 2211 | 2115 | 8 | 13 | 15 | 16 | 100 | 20 | 23,797 | 20,866 | 20,584 | 17,482 | 3871 | 5529 | 2207 | 6603 |
| 20 | 5 | 2735 | 2362 | 1923 | 2086 | 14 | 11 | 14 | 14 | 100 | 20 | 23,925 | 21,273 | 20,513 | 19,538 | 4709 | 6505 | 5209 | 4375 |
| 20 | 5 | 2787 | 2212 | 2201 | 2303 | 12 | 14 | 9 | 13 | 100 | 20 | 24,947 | 23,354 | 21,578 | 19,088 | 3962 | 4323 | 3342 | 5823 |
| 20 | 10 | 5405 | 3507 | 3777 | 3462 | 23 | 29 | 17 | 25 | ||||||||||
| 20 | 10 | 5139 | 3610 | 3453 | 3294 | 39 | 37 | 39 | 24 | ||||||||||
| 20 | 10 | 5175 | 3451 | 3276 | 3599 | 33 | 40 | 47 | 31 | ||||||||||
| 20 | 10 | 5185 | 3477 | 3150 | 3176 | 24 | 32 | 29 | 38 | ||||||||||
| 20 | 10 | 5375 | 3907 | 3324 | 3564 | 22 | 21 | 27 | 19 | ||||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sauvey, C.; Trabelsi, W.; Sauer, N. Mathematical Model and Evaluation Function for Conflict-Free Warranted Makespan Minimization of Mixed Blocking Constraint Job-Shop Problems. Mathematics 2020, 8, 121. https://0-doi-org.brum.beds.ac.uk/10.3390/math8010121
Sauvey C, Trabelsi W, Sauer N. Mathematical Model and Evaluation Function for Conflict-Free Warranted Makespan Minimization of Mixed Blocking Constraint Job-Shop Problems. Mathematics. 2020; 8(1):121. https://0-doi-org.brum.beds.ac.uk/10.3390/math8010121
Chicago/Turabian StyleSauvey, Christophe, Wajdi Trabelsi, and Nathalie Sauer. 2020. "Mathematical Model and Evaluation Function for Conflict-Free Warranted Makespan Minimization of Mixed Blocking Constraint Job-Shop Problems" Mathematics 8, no. 1: 121. https://0-doi-org.brum.beds.ac.uk/10.3390/math8010121