A Second-Order Well-Balanced Finite Volume Scheme for the Multilayer Shallow Water Model with Variable Density


Abstract
:1. Introduction
2. Governing Equations and Model
3. Numerical Scheme
3.1. First Order HLL-Type Scheme
3.2. Hydrostatic Reconstruction
3.3. Upwind Approximation of the Exchange Terms between Layers
3.4. Second Order Approximation
- First, we consider the reconstruction of the water depth h and free surface that is and and the reconstruction of the bathymetry is recovered by setting . In order to guarantee the positivity of the water depth during the reconstruction, we use the technique introduced in [46].
- Next, we consider the reconstruction of the relative density at each cell, . Let us denote by the slope of the reconstruction of and the corresponding slope for the water depth. Then, we define whereAgain, we follow [46] to guarantee that , .
- Finally, we consider the reconstruction of the velocity at each cell. Let us denote by the slope of the reconstruction of at the cell , then we define where
4. Numerical Tests
4.1. Order of Accuracy Test
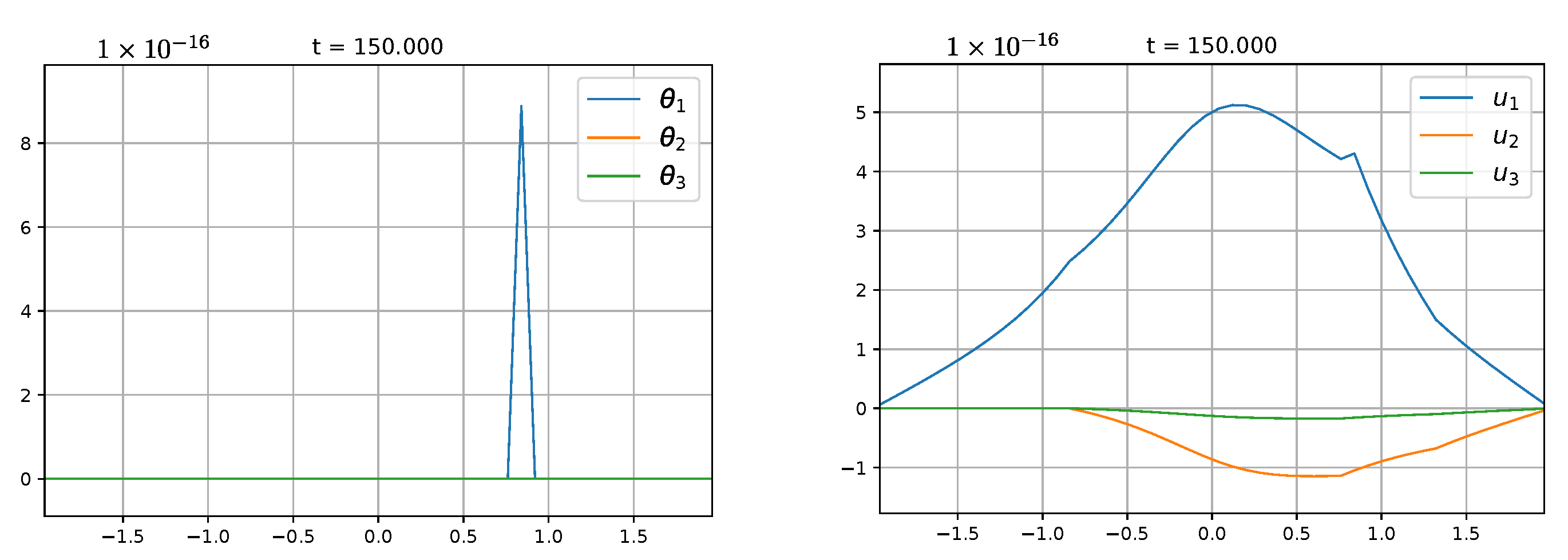
4.2. Well-Balanced Test
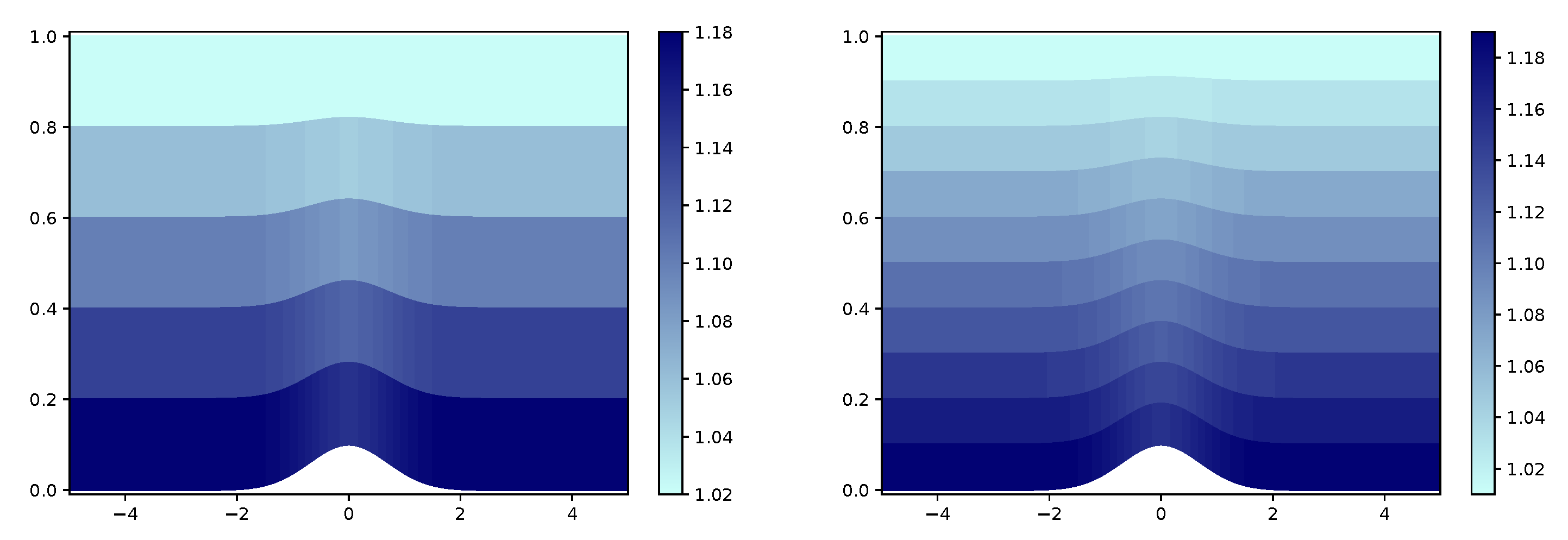
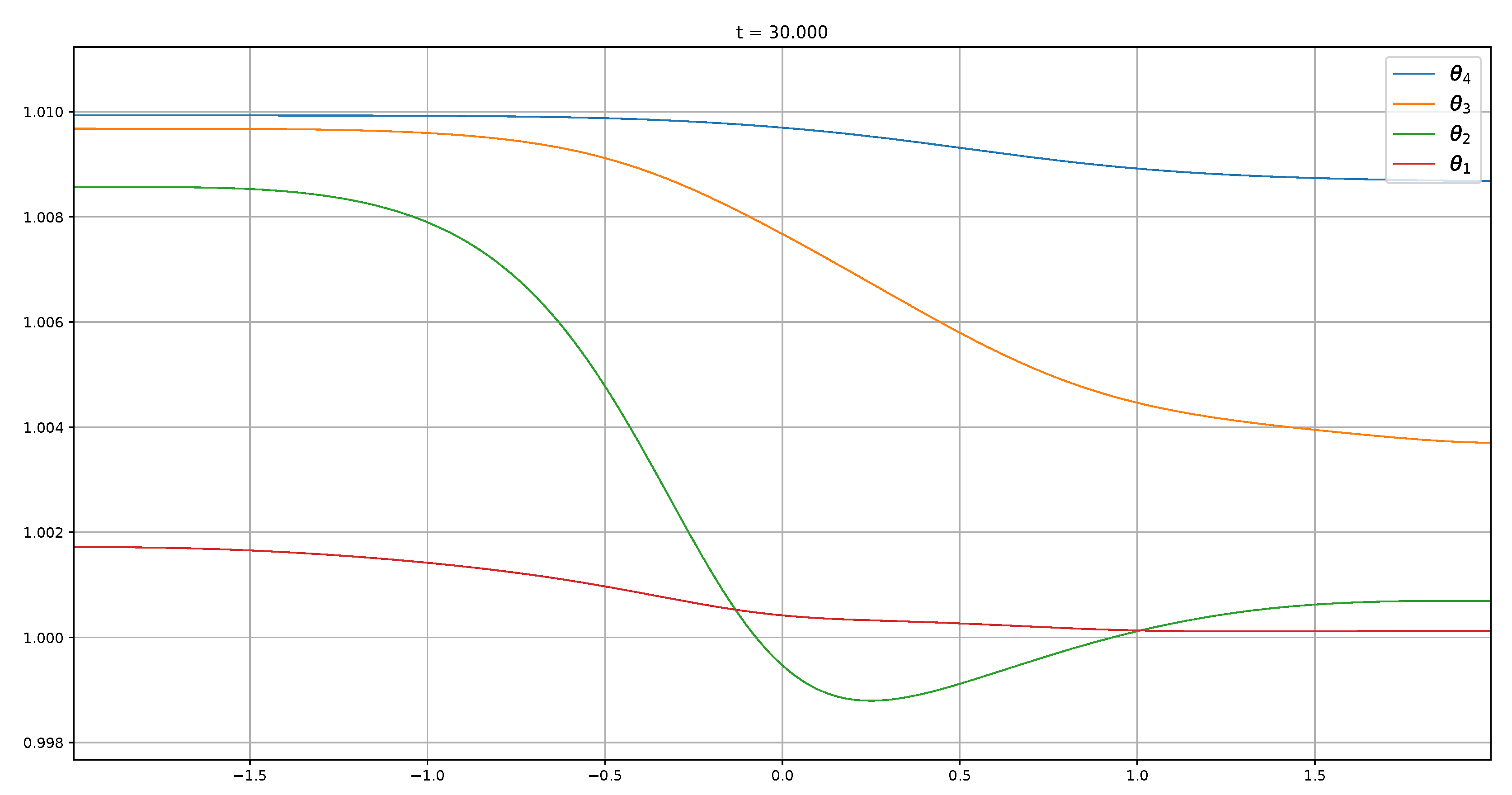
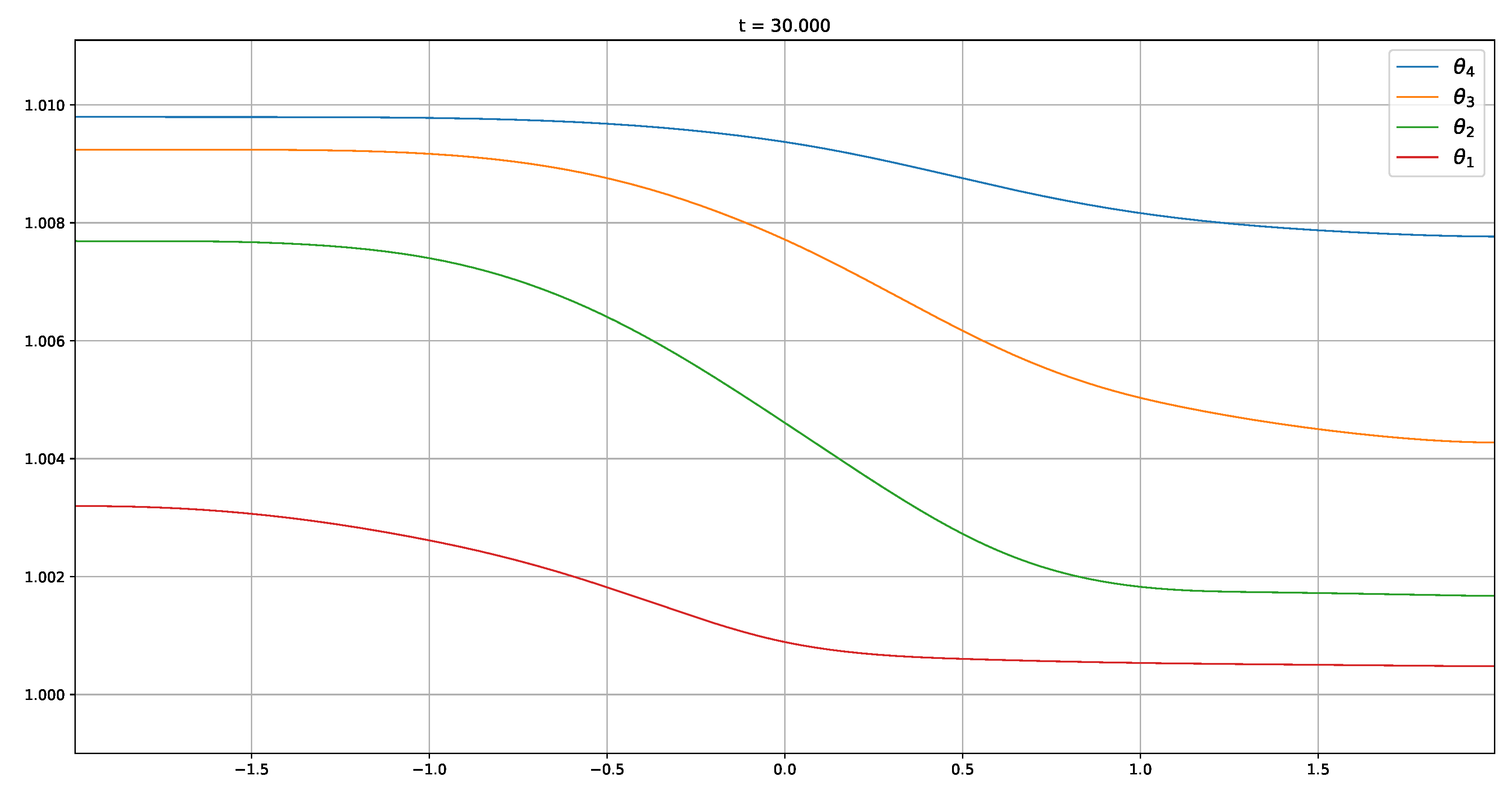
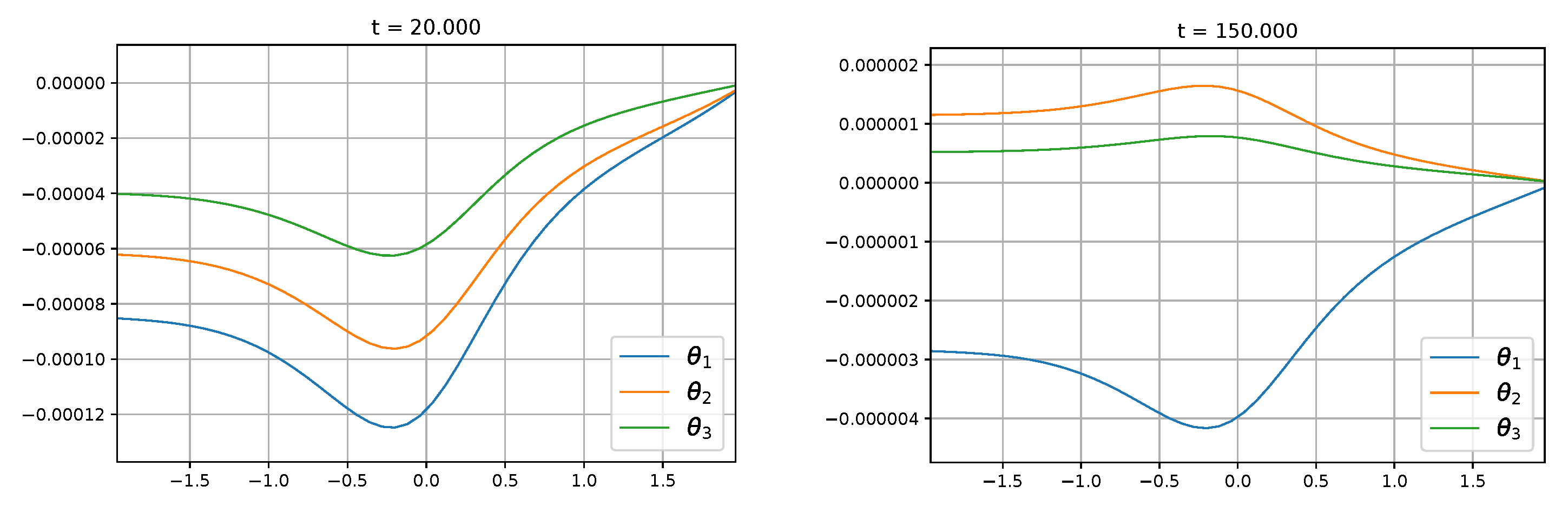
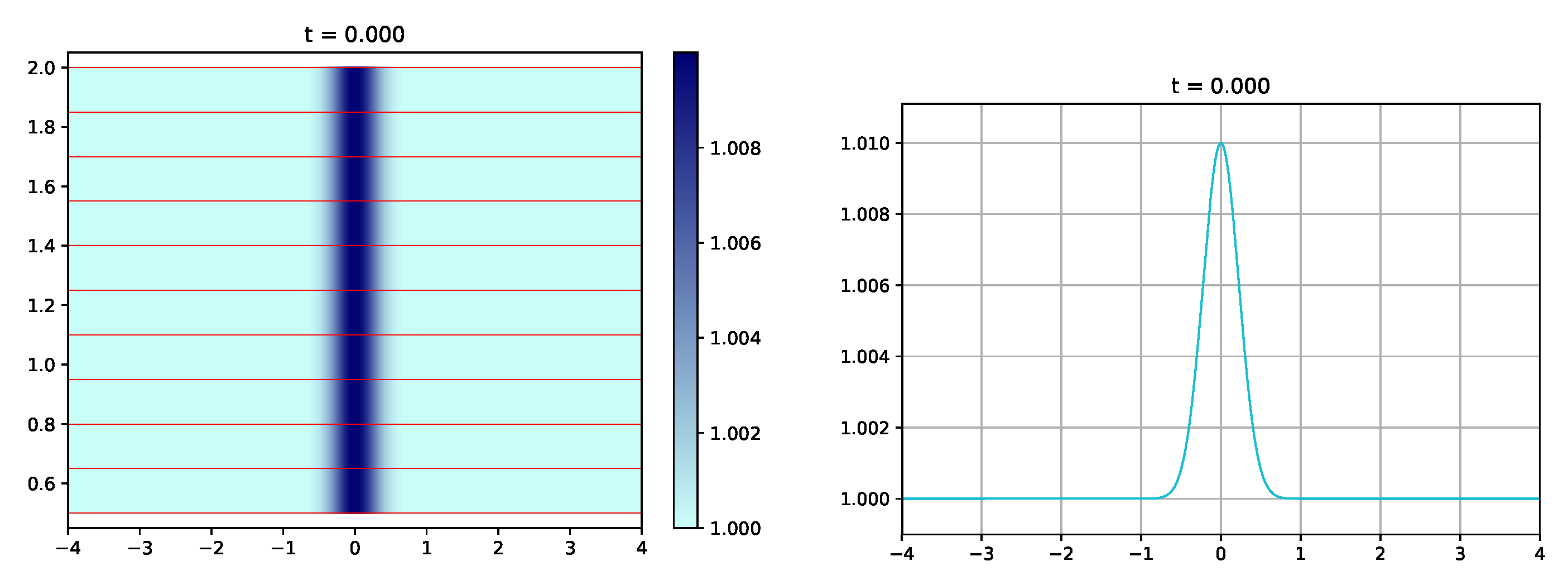
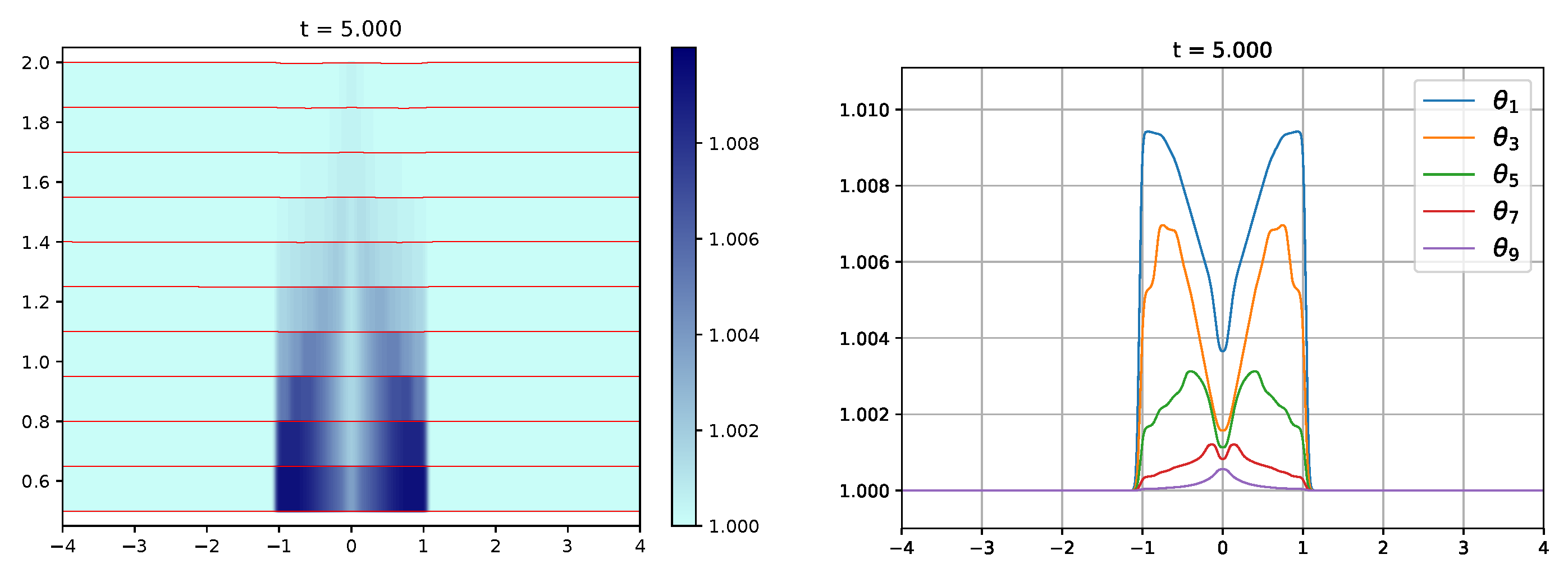
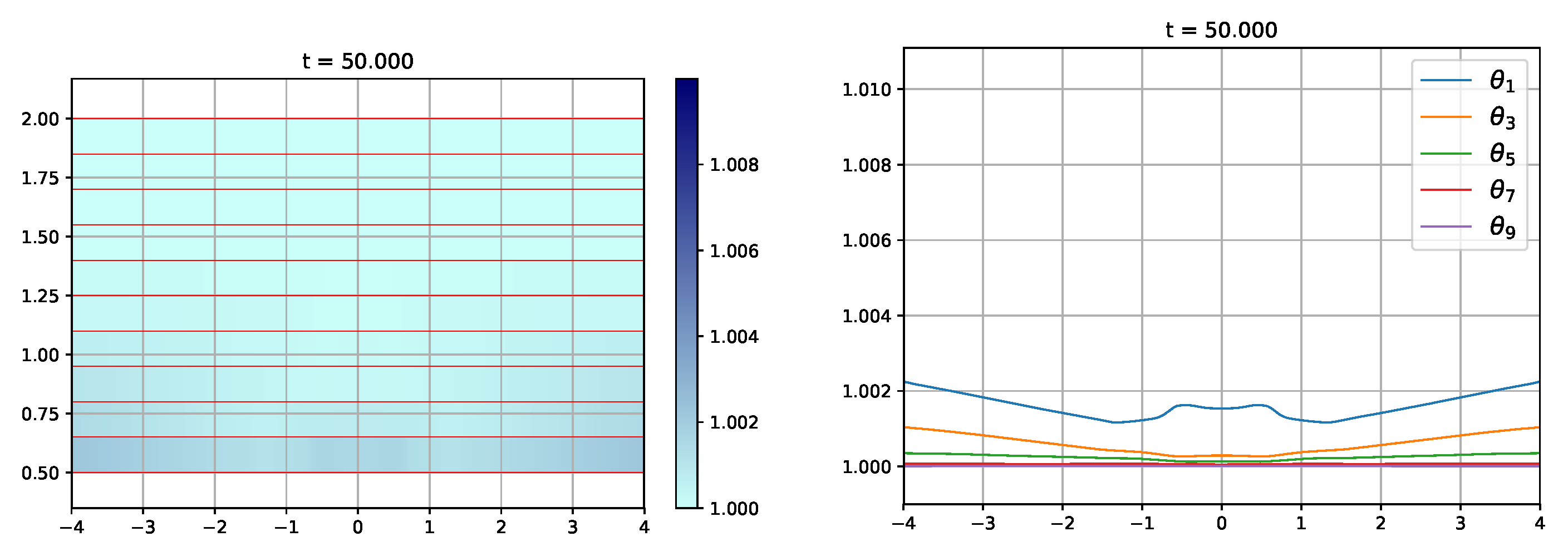
4.3. Simulation for a Smooth Distribution of Relative Density
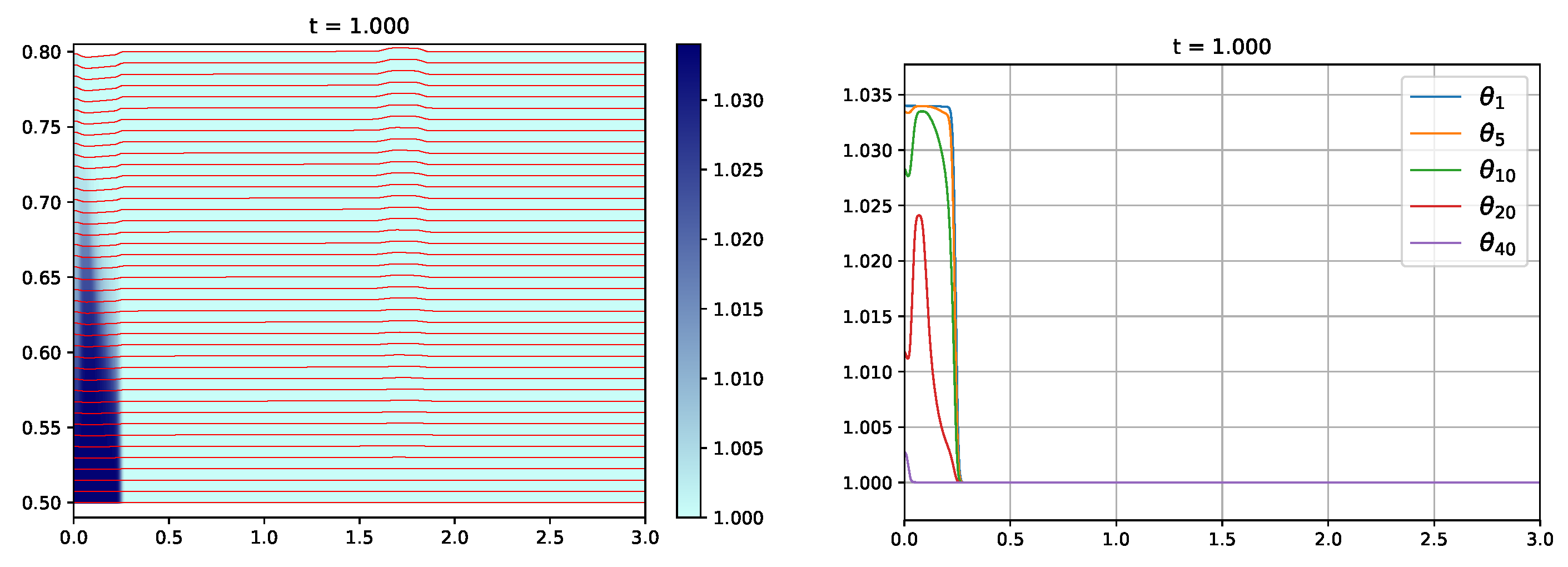
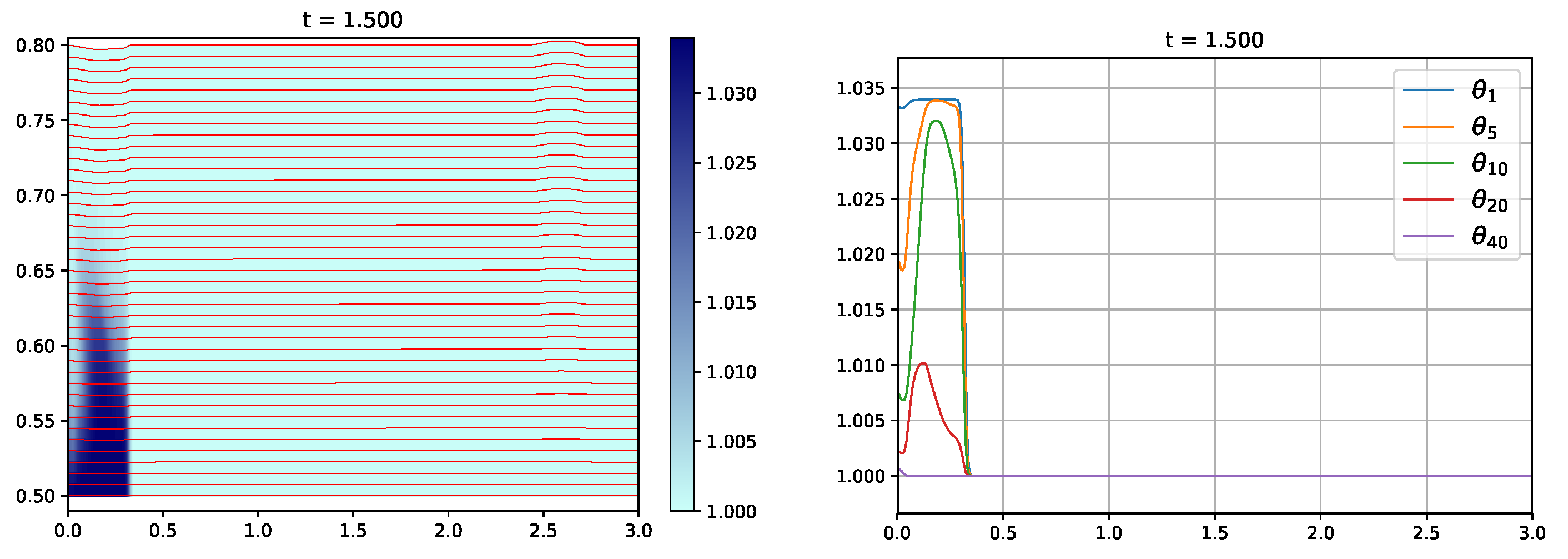
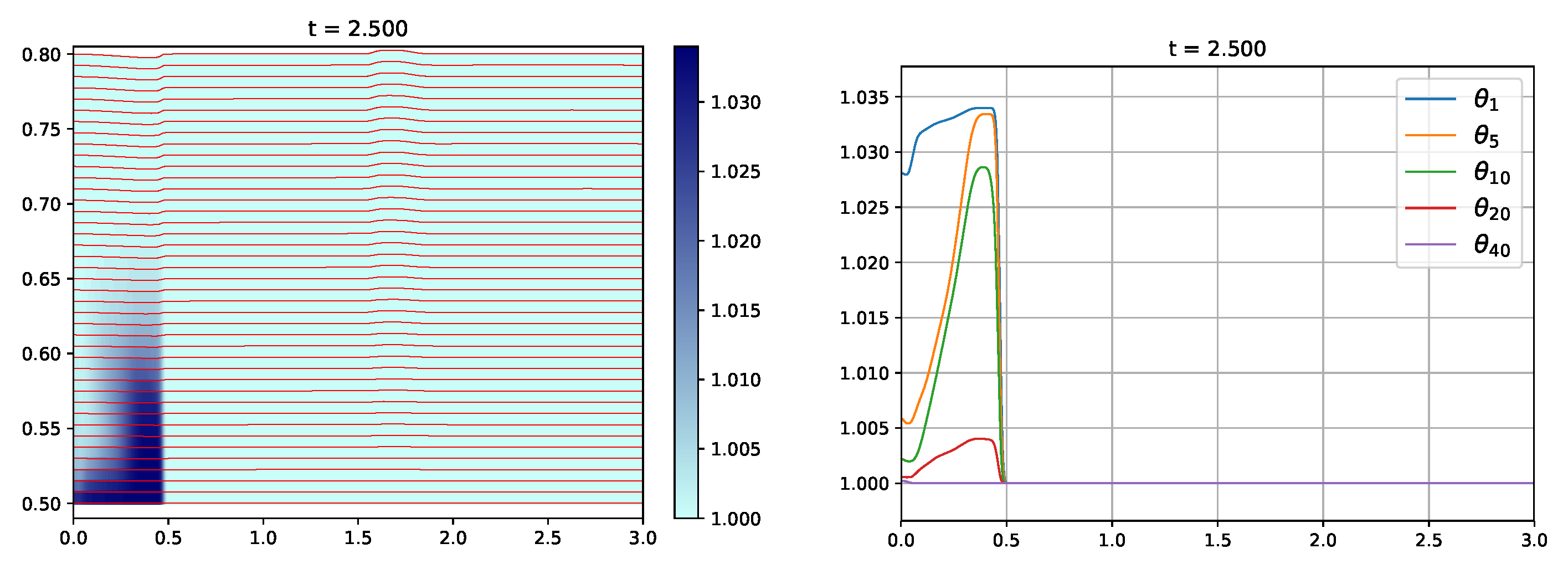
4.4. Simulation of a Lock-Exchange in a Flat Channel
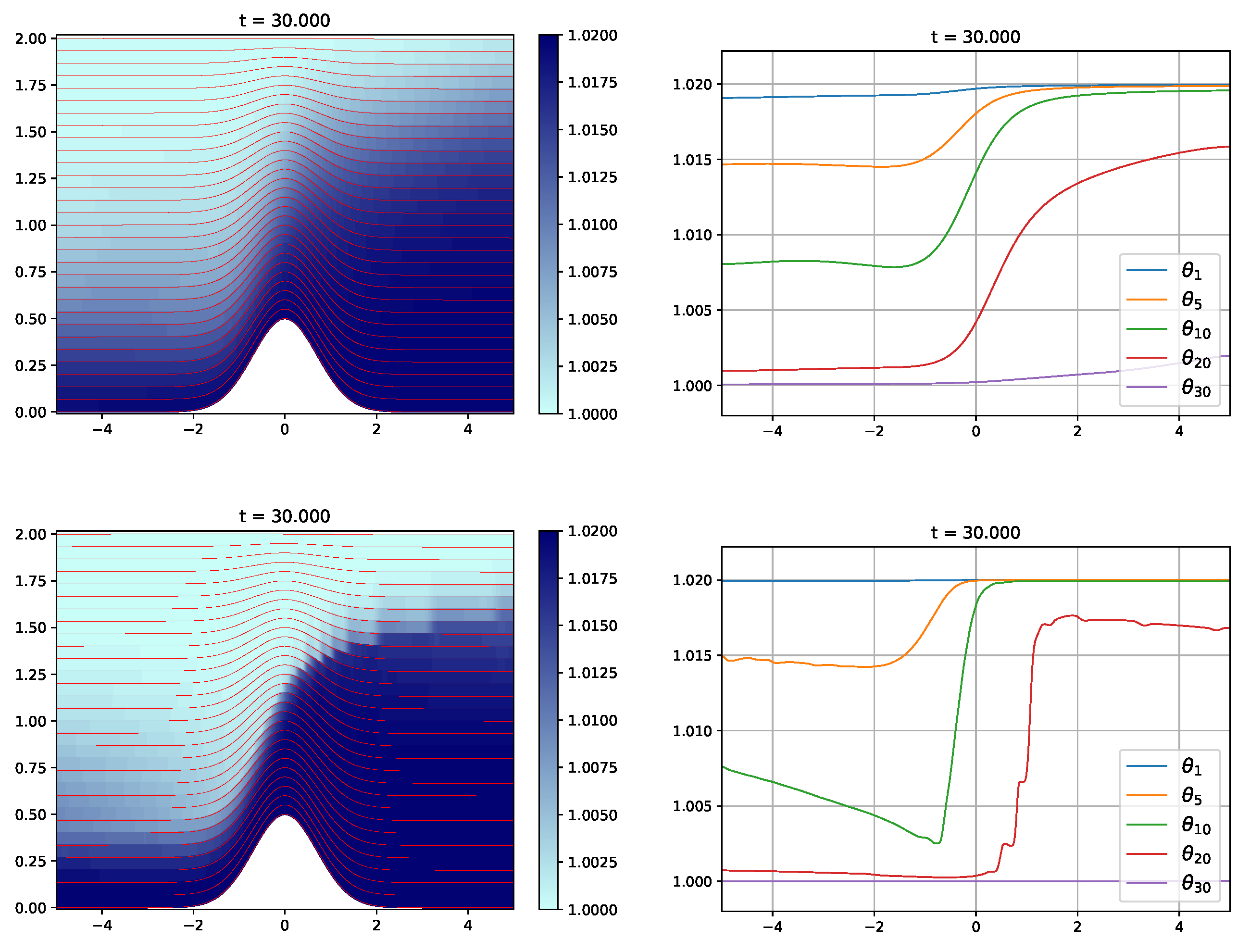
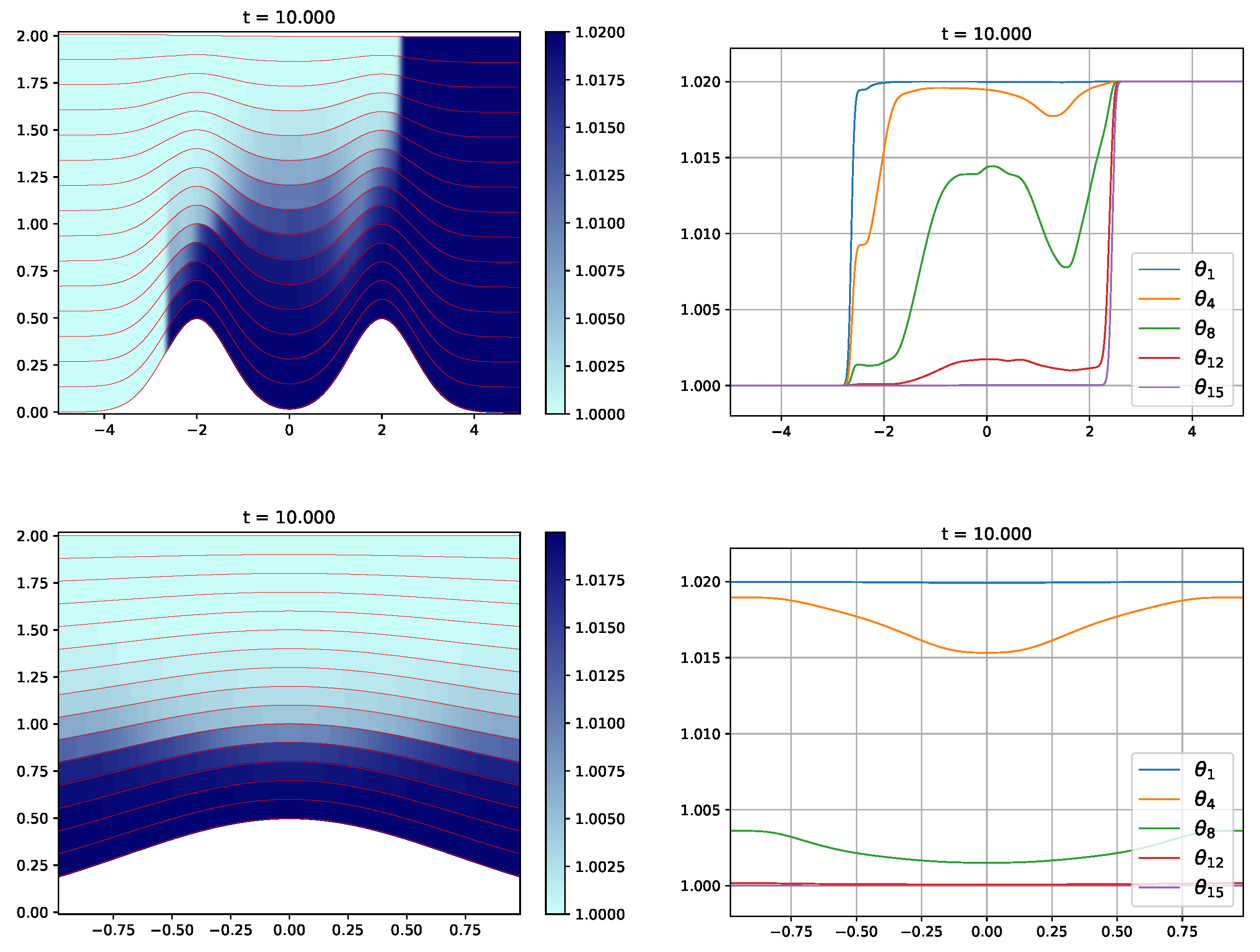
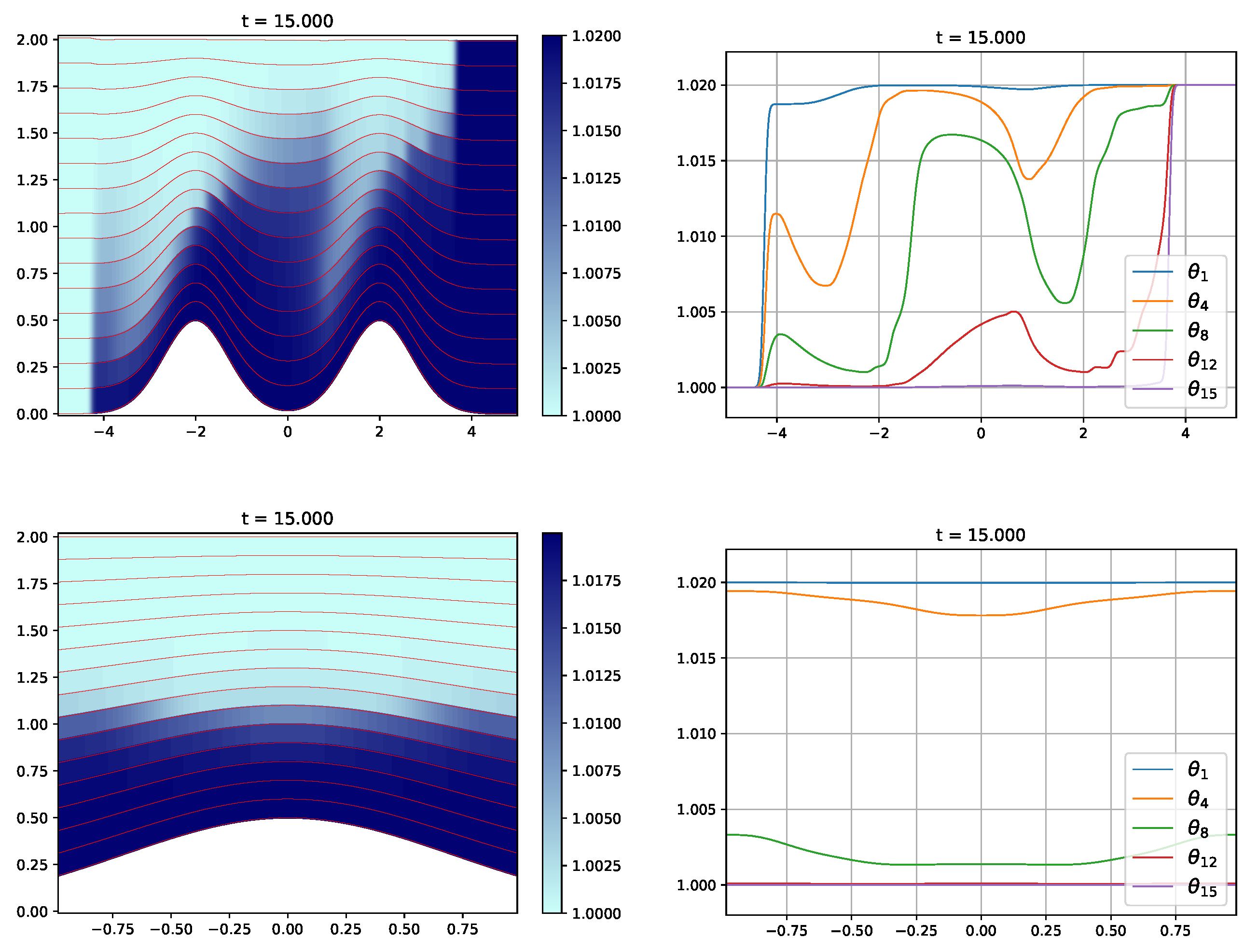
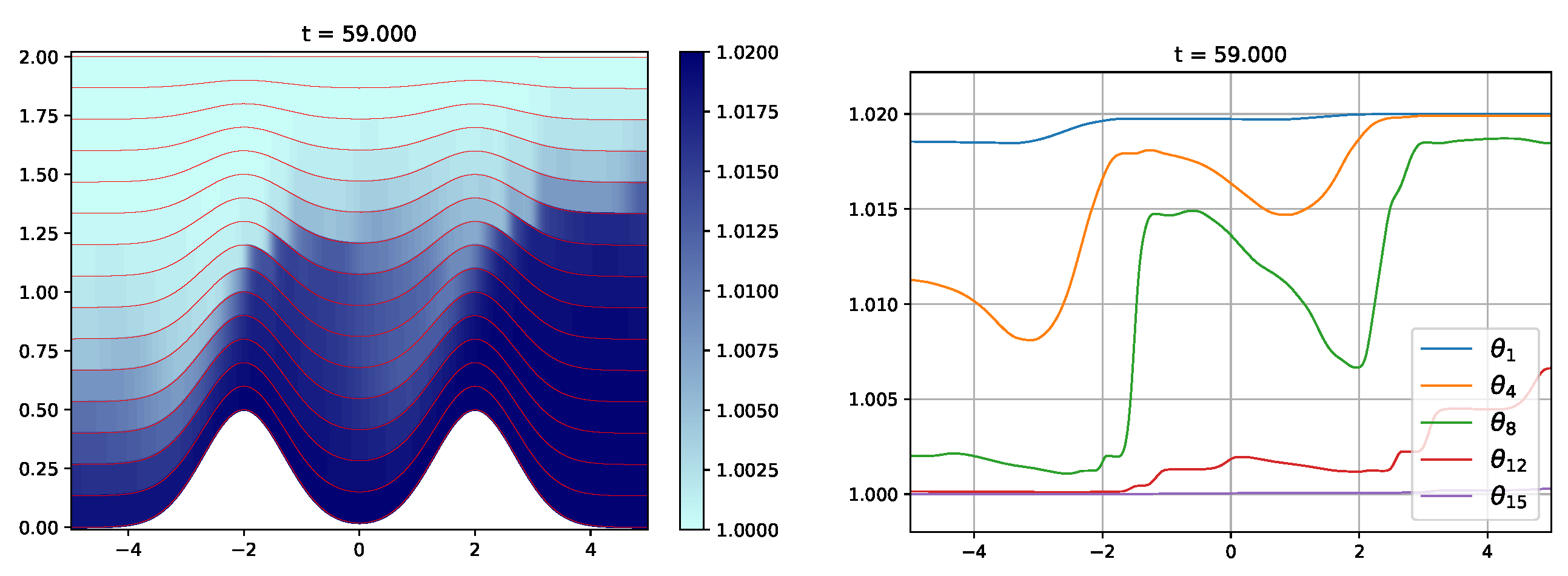
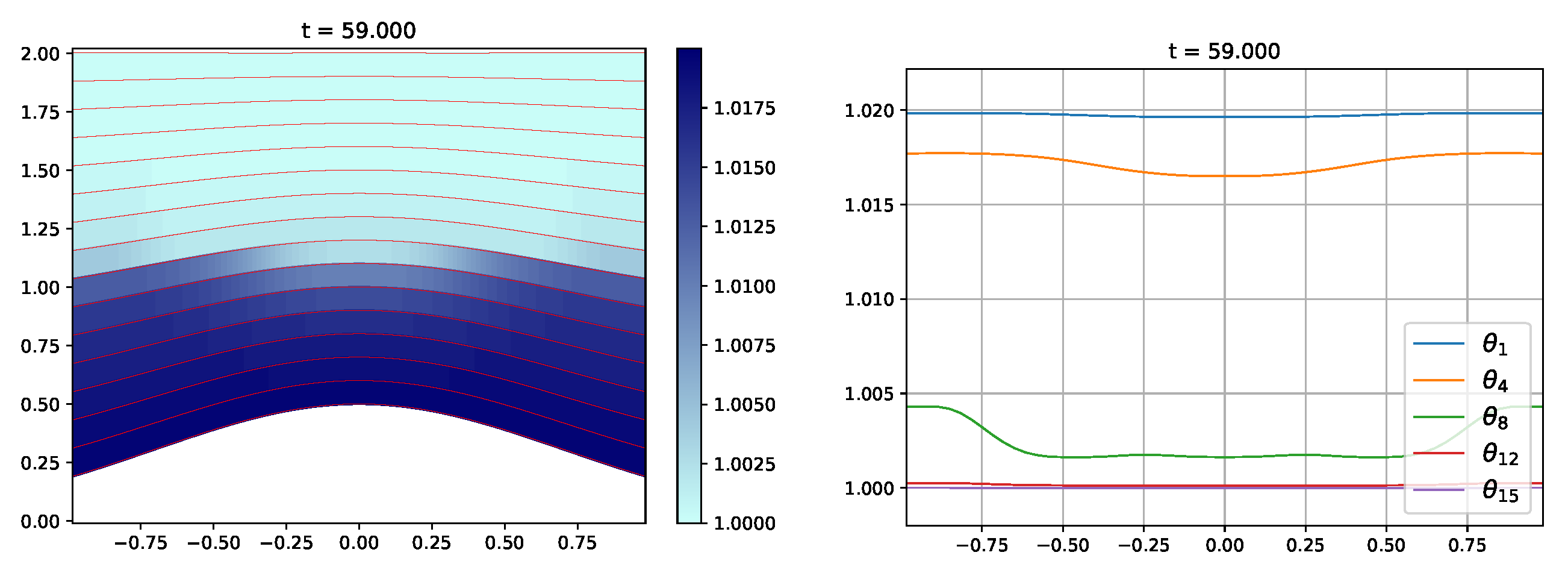
4.5. Simulation of a Dam Break Problem with a Non Constant Bathymetry Function
4.6. Simulation of a Dam Break Problem in Two Dimensions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Parallelization on GPU

Appendix B. Model Derivation
Appendix B.1. Weak Solutions with Discontinuities
- is a standard weak solution of (1) in each layer .
- satisfies the normal flux conditions at for :
- For the continuity equations,
- For the mass conservation law,
- the horizontal velocity and the density fluctuation do not depend on z inside each layer,
- both and are lineal in z inside each layer.
Appendix B.1.1. Mass Conservation Jump Conditions
Appendix B.1.2. Momentum Conservation Jump Conditions
Appendix B.2. Vertical Velocity
- First, the quantity is determined from the given mass exchange through the bottom, and using (A9) by
- Then, for and , we set
Appendix B.3. A Particular Weak Solution with Hydrostatic Pressure
Appendix B.4. Closure of the Model
References
- De St. Venant, B. Theorie du mouvement non-permanent des eaux avec application aux crues des rivers et a l’introduntion des Marees dans leur lit. Acad. Sci. Comptes Redus 1871, 73, 148–154. [Google Scholar]
- Cushman-Roisin, B.; Beckers, J.M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Audusse, E.; Bristeau, M.O. Finite-Volume Solvers for a Multilayer Saint–Venant System. Appl. Math. Comput. Sci. 2007, 17, 311–320. [Google Scholar] [CrossRef] [Green Version]
- Audusse, E.; Bristeau, M.O.; Perthame, B.; Sainte-Marie, J. A multilayer Saint–Venant system with mass exchanges for shallow water flows. Derivation and numerical validation. ESAIM Math. Model. Numer. Anal. 2011, 45, 169–200. [Google Scholar] [CrossRef]
- Gosse, L. A well-balanced scheme using non-conservative products designed for hyperbolic systems of conservation laws with source terms. Math. Model. Methods Appl. Sci. 2001, 11, 339–365. [Google Scholar] [CrossRef] [Green Version]
- Macias, J.; Castro, M.J.; González-Vida, J.M.; de la Asunción, M.; Ortega, S. HySEA: An operational GPU-based model for Tsunami Early Warning Systems. In Proceedings of the EGU General Assembly 2014, Vienna, Austria, 27 April–2 May 2014; p. 14217. [Google Scholar]
- de la Asunción, M.; Castro, M.; Mantas, J.; Ortega, S. Numerical simulation of tsunamis generated by landslides on multiple GPUs. Adv. Eng. Softw. 2016, 99, 59–72. [Google Scholar] [CrossRef]
- LeVeque, R.J.; George, D.L.; Berger, M.J. Tsunami modelling with adaptively refined finite volume methods. Acta Numer. 2011, 20, 211–289. [Google Scholar] [CrossRef] [Green Version]
- Barthélemy, E. Nonlinear shallow water theories for coastal waves. Surv. Geophys. 2004, 25, 315–337. [Google Scholar] [CrossRef]
- Lastra, M.; Mantas, J.M.; Ureña, C.; Castro, M.J.; García-Rodríguez, J.A. Simulation of shallow-water systems using graphics processing units. Math. Comput. Simul. 2009, 80, 598–618. [Google Scholar] [CrossRef]
- Brufau, P.; Vázquez-Cendón, M.; García-Navarro, P. A numerical model for the flooding and drying of irregular domains. Int. J. Numer. Methods Fluids 2002, 39, 247–275. [Google Scholar] [CrossRef]
- Gonzalez-Sanchis, M.; Murillo, J.; Latorre, B.; Comin, F.; Garcia-Navarro, P. Transient Two-Dimensional Simulation of Real Flood Events in a Mediterranean Floodplain. J. Hydraul. Eng. ASCE 2012, 138, 629–641. [Google Scholar] [CrossRef] [Green Version]
- Ersoy, M.; Lakkis, O.; Townsend, P. A Saint–Venant shallow water model for overland flows with precipitation and recharge. arXiv 2017, arXiv:1705.05470. [Google Scholar]
- Martínez-Cantó, R.; Hidalgo, A. A Methodology Based on Numerical Simulation to Study River Floods. Application to Lower River Omaña Basin. Water Resour. 2019, 46, 844–852. [Google Scholar] [CrossRef]
- Ersoy, M.; Lakkis, O.; Townsend, P. Numerical simulation of flood inundation using a well-balanced kinetic scheme for the shallow water equations with bulk recharge and discharge. In Proceedings of the EGU General Assembly 2016, Vienna, Austria, 17 April–22 April 2016; Volume 18. [Google Scholar]
- Dawson, C.; Kubatko, E.J.; Westerink, J.J.; Trahan, C.; Mirabito, C.; Michoski, C.; Panda, N. Discontinuous Galerkin methods for modeling hurricane storm surge. Adv. Water Resour. 2011, 34, 1165–1176. [Google Scholar] [CrossRef] [Green Version]
- Mandli, K.T.; Dawson, C.N. Adaptive mesh refinement for storm surge. Ocean Model. 2014, 75, 36–50. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, S.; Bunya, S.; Westerink, J.J.; Dawson, C.; Luettich, R.A. Scalability of an unstructured grid continuous Galerkin based hurricane storm surge model. J. Sci. Comput. 2011, 46, 329–358. [Google Scholar] [CrossRef]
- Audusse, E.; Bristeau, M.O. A well-balanced positivity preserving “second-order” scheme for shallow water flows on unstructured meshes. J. Comput. Phys. 2005, 206, 311–333. [Google Scholar] [CrossRef]
- Fernández-Nieto, E.D.; Koné, E.H.; Chacón Rebollo, T. A Multilayer Method for the Hydrostatic Navier–Stokes Equations: A Particular Weak Solution. J. Sci. Comput. 2014, 60, 408–437. [Google Scholar] [CrossRef] [Green Version]
- Audusse, E.; Bristeau, M.; Decoene, A. Numerical simulations of 3D free surface flows by a multilayer Saint–Venant model. Int. J. Numer. Methods Fluids 2008, 56, 331–350. [Google Scholar] [CrossRef]
- Bonaventura, L.; Fernández-Nieto, E.D.; Garres-Díaz, J.; Narbona-Reina, G. Multilayer shallow water models with locally variable number of layers and semi-implicit time discretization. J. Comput. Phys. 2018, 364, 209–234. [Google Scholar] [CrossRef] [Green Version]
- Casulli, V.; Stelling, G.S. Numerical simulation of 3D quasi-hydrostatic, free-surface flows. J. Hydraul. Eng. 1998, 124, 678–686. [Google Scholar] [CrossRef]
- Casulli, V. A semi-implicit finite difference method for non-hydrostatic, free-surface flows. Int. J. Numer. Methods Fluids 1999, 30, 425–440. [Google Scholar] [CrossRef]
- Casulli, V.; Zanolli, P. Semi-implicit numerical modeling of nonhydrostatic free-surface flows for environmental problems. Math. Comput. Model. 2002, 36, 1131–1149. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Model. 2012, 43, 22–35. [Google Scholar] [CrossRef]
- Bristeau, M.O.; Mangeney, A.; Sainte-Marie, J.; Seguin, N. An energy-consistent depth-averaged Euler system: Derivation and properties. arXiv 2014, arXiv:1406.6565. [Google Scholar] [CrossRef]
- Fernández-Nieto, E.D.; Parisot, M.; Penel, Y.; Sainte-Marie, J. A hierarchy of dispersive layer-averaged approximations of Euler equations for free surface flows. Commun. Math. Sci. 2018, 16, 1169–1202. [Google Scholar] [CrossRef] [Green Version]
- Tumolo, G.; Bonaventura, L. Simulations of Non-hydrostatic Flows by an Efficient and Accurate p-Adaptive DG Method. In Numerical Methods for Flows: FEF 2017 Selected Contributions; Springer International Publishing: Cham, Switzerland, 2020; pp. 41–53. [Google Scholar] [CrossRef]
- de Luna, T.M.; Fernández Nieto, E.; Castro Díaz, M.J. Derivation of a Multilayer Approach to Model Suspended Sediment Transport: Application to Hyperpycnal and Hypopycnal Plumes. Commun. Comput. Phys. 2017, 22, 1439–1485. [Google Scholar] [CrossRef] [Green Version]
- Bürger, R.; Fernández-Nieto, E.D.; Andrés Osores, V. A dynamic multilayer shallow water model for polydisperse sedimentation. ESAIM Math. Model. Numer. Anal. 2019. [Google Scholar] [CrossRef] [Green Version]
- Audusse, E.; Bristeau, M.O.; Pelanti, M.; Sainte-Marie, J. Approximation of the hydrostatic Navier–Stokes system for density stratified flows by a multilayer model: Kinetic interpretation and numerical solution. J. Comput. Phys. 2011, 230, 3453–3478. [Google Scholar] [CrossRef]
- Bouchut, F.; Zeitlin, V. A robust well-balanced scheme for multi-layer shallow water equations. Discret. Contin. Dyn. Syst. Ser. B 2010, 13, 739–758. [Google Scholar] [CrossRef] [Green Version]
- Castro, M.; Macías, J.; Parés, C. A Q-scheme for a class of systems of coupled conservation laws with source term. Application to a two-layer 1D shallow water system. ESAIM Math. Model. Numer. Anal. 2001, 35, 107–127. [Google Scholar] [CrossRef] [Green Version]
- Adduce, C.; Sciortino, G.; Proietti, S. Gravity Currents Produced by Lock Exchanges: Experiments and Simulations with a Two-Layer Shallow-Water Model with Entrainment. J. Hydraul. Eng. 2012, 138, 111–121. [Google Scholar] [CrossRef]
- Bermúdez, A.; Vázquez, M.E. Upwind methods for hyperbolic conservation laws with source terms. Comput. Fluids 1994, 23, 1049–1071. [Google Scholar] [CrossRef]
- Creaco, E.; Campisano, A.; Khe, A.; Modica, C.; Russo, G. Head reconstruction method to balance flux and source terms in shallow water equations. J. Eng. Mech. 2010, 136, 517–523. [Google Scholar] [CrossRef]
- Russo, G.; Khe, A. High order well-balanced schemes based on numerical reconstruction of the equilibrium variables. In Waves and Stability in Continuous Media; World Scientific: Singapore, 2010; pp. 230–241. [Google Scholar]
- Castro, M.J.; de Luna, T.M.; Parés, C. Well-balanced schemes and path-conservative numerical methods. In Handbook of Numerical Analysis; Elsevier: Amsterdam, The Netherlands, 2017; Volume 18, pp. 131–175. [Google Scholar]
- Castro, M.J.; Pardo Milanés, A.; Parés, C. Well-balanced numerical schemes based on a generalized hydrostatic reconstruction technique. Math. Model. Methods Appl. Sci. 2007, 17, 2055–2113. [Google Scholar] [CrossRef]
- Parés, C. Numerical methods for nonconservative hyperbolic systems: A theoretical framework. SIAM J. Numer. Anal. 2006, 44, 300–321. [Google Scholar] [CrossRef]
- Castro, M.; Fernández-Nieto, E. A Class of Computationally Fast First, Order Finite Volume Solvers: PVM Methods. SIAM J. Sci. Comput. 2012, 34. [Google Scholar] [CrossRef] [Green Version]
- Audusse, E.; Bouchut, F.; Bristeau, M.O.; Klein, R.; Perthame, B. A Fast and Stable Well-Balanced Scheme with Hydrostatic Reconstruction for Shallow Water Flows. SIAM J. Sci. Comput. 2004, 25, 2050–2065. [Google Scholar] [CrossRef]
- Morales de Luna, T.; Castro Díaz, M.; Parés, C. Reliability of first order numerical schemes for solving shallow water system over abrupt topography. Appl. Math. Comput. 2013, 219, 9012–9032. [Google Scholar] [CrossRef] [Green Version]
- Van Leer, B. Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method. J. Comput. Phys. 1979, 32, 101–136. [Google Scholar] [CrossRef]
- Zhang, X.; Shu, C.W. On maximum-principle-satisfying high order schemes for scalar conservation laws. J. Comput. Phys. 2010, 229, 3091–3120. [Google Scholar] [CrossRef]
- Gottlieb, S.; Shu, C.W. Total Variation Diminishing Runge–Kutta Schemes. Math. Comput. 1996, 67. [Google Scholar] [CrossRef] [Green Version]
- Castro, M.J.; Parés, C. Well-Balanced High-Order Finite Volume Methods for Systems of Balance Laws. J. Sci. Comput. 2020, 82, 48. [Google Scholar] [CrossRef]
- Escalante, C.; de Luna, T.M.; Castro, M. Non-hydrostatic pressure shallow flows: GPU implementation using finite volume and finite difference scheme. Appl. Math. Comput. 2018, 338, 631–659. [Google Scholar] [CrossRef] [Green Version]
- Lane-Serff, G.F.; Beal, L.M.; Hadfield, T.D. Gravity current flow over obstacles. J. Fluid Mech. 1995, 292, 39–53. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Juckeland, G. OpenACC for Programmers: Concepts and Strategies; Addison-Wesley Professional: Boston, MA, USA, 2017. [Google Scholar]
- Christgau, S.; Spazier, J.; Schnor, B.; Hammitzsch, M.; Babeyko, A.; Waechter, J. A comparison of CUDA and OpenACC: Accelerating the Tsunami Simulation EasyWave. In Proceedings of the ARCS 2014—2014 Workshop Proceedings on Architecture of Computing Systems, Luebeck, Germany, 25–28 February 2014; pp. 1–5. [Google Scholar]
- Hoshino, T.; Maruyama, N.; Matsuoka, S.; Takaki, R. CUDA vs OpenACC: Performance Case Studies with Kernel Benchmarks and a Memory-Bound CFD Application. In Proceedings of the 2013 13th IEEE/ACM International Symposium on Cluster, Cloud, and Grid Computing, Delft, The Netherlands, 13–16 May 2013; pp. 136–143. [Google Scholar]
- Mantas, J.M.; De la Asunción, M.; Castro, M.J. An introduction to GPU computing for numerical simulation. In Numerical Simulation in Physics and Engineering; Springer: Berlin, Germany, 2016; pp. 219–251. [Google Scholar]










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | ||||||
|---|---|---|---|---|---|---|
| N. Cells | Error | Order | Error | Order | Error | Order |
| 25 | 5.97 | - | 4.74 | - | 2.14 | - |
| 50 | 4.51 | 0.41 | 3.71 | 0.35 | 1.72 | 0.31 |
| 100 | 2.82 | 0.68 | 2.46 | 0.59 | 1.13 | 0.61 |
| 200 | 1.60 | 0.82 | 1.50 | 0.72 | 6.57 | 0.78 |
| 400 | 8.16 | 0.97 | 8.03 | 0.90 | 3.38 | 0.96 |
| h | ||||||
|---|---|---|---|---|---|---|
| N. Cells | Error | Order | Error | Order | Error | Order |
| 25 | 2.18 | - | 2.32 | - | 5.92 | - |
| 50 | 1.17 | 0.90 | 1.34 | 0.79 | 3.77 | 0.64 |
| 100 | 5.06 | 1.21 | 5.47 | 1.29 | 1.73 | 1.12 |
| 200 | 1.53 | 1.72 | 1.57 | 1.80 | 5.21 | 1.74 |
| 400 | 3.82 | 2.00 | 3.87 | 2.02 | 1.30 | 2.00 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerrero Fernández, E.; Castro-Díaz, M.J.; Morales de Luna, T. A Second-Order Well-Balanced Finite Volume Scheme for the Multilayer Shallow Water Model with Variable Density. Mathematics 2020, 8, 848. https://0-doi-org.brum.beds.ac.uk/10.3390/math8050848
Guerrero Fernández E, Castro-Díaz MJ, Morales de Luna T. A Second-Order Well-Balanced Finite Volume Scheme for the Multilayer Shallow Water Model with Variable Density. Mathematics. 2020; 8(5):848. https://0-doi-org.brum.beds.ac.uk/10.3390/math8050848
Chicago/Turabian StyleGuerrero Fernández, Ernesto, Manuel Jesús Castro-Díaz, and Tomás Morales de Luna. 2020. "A Second-Order Well-Balanced Finite Volume Scheme for the Multilayer Shallow Water Model with Variable Density" Mathematics 8, no. 5: 848. https://0-doi-org.brum.beds.ac.uk/10.3390/math8050848