Explicit Continuity Conditions for G1 Connection of S-λ Curves and Surfaces



1
Department of Applied Mathematics, Xi’an University of Technology, Xi’an 710048, China
2
Department of Mathematics, University of Sargodha, Sargodha 40100, Pakistan
3
Department of Mechanical Engineering, Shizuoka University, Hamamatsu 432-8011, Japan
*
Authors to whom correspondence should be addressed.
Mathematics 2020, 8(8), 1359; https://0-doi-org.brum.beds.ac.uk/10.3390/math8081359
Submission received: 9 July 2020
/
Revised: 6 August 2020
/
Accepted: 11 August 2020
/
Published: 13 August 2020
(This article belongs to the Special Issue Modern Geometric Modeling: Theory and Applications)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:The S-λ model is one of the most useful tools for shape designs and geometric representations in computer-aided geometric design (CAGD), which is due to its good geometric properties such as symmetry, shape adjustable property. With the aim to solve the problem that complex S-λ curves and surfaces cannot be constructed by a single curve and surface, the explicit continuity conditions for G1 connection of S-λ curves and surfaces are investigated in this paper. On the basis of linear independence and terminal properties of S-λ basis functions, the conditions of G1 geometric continuity between two adjacent S-λ curves and surfaces are proposed, respectively. Modeling examples imply that the continuity conditions proposed in this paper are easy and effective, which indicate that the S-λ curves and surfaces can be used as a powerful supplement of complex curves and surfaces design in computer aided design/computer aided manufacturing (CAD/CAM) system.
Keywords:
S-λ basis functions; S-λ curves and surfaces; geometric continuity conditions; complex curve and surface designMSC:
65D07; 65D10; 65D17; 65D18; 68U05; 68U071. Introduction
In the design of complex curves and surfaces, the basis functions of geometric models determine the properties of the curves and surfaces constructed. The basis functions of common models in CAGD include the Bernstein basis function, the Poisson basis function, the negative Bernstein basis function, the B-spline basis function and so on, which are closely related to the probability distribution—especially the discrete probability distribution [1,2]. For example, the Bernstein basis function contained in the Bézier model is taken from binomial distribution, and the B-spline basis function used in the B-spline model is closely related to some stochastic processes [3]. The negative Bernstein basis function which was proposed by Goldman [4] corresponds to the negative binomial distribution, and the Poisson basis function advanced by Goldman and Morin [5] corresponds to the Poisson distribution. The S-λ basis functions proposed by [6,7] are a kind of discrete probability modeling defined by generating function and transformation factor combined with probability convolution. By taking different generating functions and transformation factors, different S-λ basis functions can be obtained, such as the Bernstein basis function, the Poisson basis function, the negative Bernstein basis function, etc. Therefore, we can study these well-known basis functions mentioned above in a unified way by S-λ basis function. Furthermore, S-λ curves and surfaces include Bézier curves and surfaces, Poisson curves and surfaces, rational Bézier curves and surfaces as well as many other curves and surfaces. In conclusion, the studies of S-λ methods provide a unified scheme for dealing with these curves and surfaces and reveal the relations among these curves and surfaces. Consequently, the related studies based on the S-λ curves and surfaces have great significant value in theory and practical application. Based on the advantages of the S-λ model, Lu and Qin [8] proposed a degree reduction method of S-λ curves on the basis of genetic simulated annealing algorithm. Chen et al. [9] proposed a new shape-adjustment method of S-λ curves. Some applications of S-λ model can be found in [10,11].
In addition, in the geometric-modeling design of CAD/CAM, a problem often encountered is that complex curves and surfaces cannot be constructed by a single curve and surface. Hence, it is necessary to study the geometric continuity conditions for S-λ curves and surfaces. To date, there are two kinds of methods established for the continuity between geometric models [12]. One is parametric continuity, which is called Cn continuity. The other is geometric continuity, or Gn continuity. Furthermore, it is usually required to satisfy some certain conditions. For example, for two adjacent parametric curves P(t) and Q(t), the necessary and sufficient conditions for G1 smooth continuity are P(1) = Q(0) and P’(1) = αQ’(0), where is a constant. Similarly, if two surfaces need to satisfy G1 continuity, they should not only have a common boundary curve, but also have a common tangent plane at the common joint. In order to solve the problem mentioned above, many international scholars have done many studies on the related algorithms of geometric continuity conditions for different geometric models [13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30].
As we all know, the geometric continuity conditions of traditional Bézier, rational Bézier and non-uniform rational B-spline (NURBS) surfaces, which can be used to produce engineering complex curves and surfaces, have been widely researched in [13,14,15,16,17,18,19]. Nowadays, the research on geometric continuity conditions of curves and surfaces with shape parameters is still a hot issue in the CAGD field. Hu et al. [20] presented a novel shape-adjustable generalized Bézier curves and surfaces (that is SG-Bézier curves and surfaces) firstly. Moreover, then the conditions of G1 and G2 geometric continuity between two adjacent SG-Bézier curves and surfaces are derived [21,22]. Subsequently, the geometric continuity conditions of Q-Bézier curves and surfaces are studied in [23] and [24], respectively. Furthermore, Qian and Tang [25] investigated the sufficient and necessary conditions for continuity of curvature and tangency between H-Bézier curves of degree 4. Usman et al. [26] discussed the C2 and G2 continuity conditions of TC Bézier-like curves for complex curve modeling. Cr and Gr (r = 0,1,2,3) continuity conditions between GHT-Bézier curves with shape parameters are studied by Bibi et al. [27]. In [28], algorithms of constructing complex curves by using generalized H-Bézier model are proposed. Hu and Wu [29] researched the geometric conditions of G1 and G2 continuity for generalized quartic H-Bézier curves and extended the conditions to the corresponding developable surface. Analogously, the conditions of G1 continuity, Farin–Boehm G2 continuity and G2 Beta continuity for developable Bézier-like surfaces are derived in [30]. In order to handle the problem of not being able to construct complex curves and surfaces using a single S-λ curve and surface, in this paper, the conditions of G1 geometric continuity between two adjacent S-λ curves and surfaces are derived, respectively. Numeric examples indicate that the method proposed in this paper is effective, so some complex S-λ curves and surfaces can be constructed well.
The rest of the paper is organized as follows: The definition of S-λ basis functions and S-λ curves and surfaces are introduced in Section 2. In Section 3, the geometric continuity conditions for S-λ curves and surfaces are derived. Moreover, some numeric examples are presented in Section 4. Finally, a brief conclusions are summarized in Section 5.
2. Preliminaries
2.1. Univariate S-λ Basis Functions and S-λ Curve
For any given positive integer m, let be a given sequence of positive numbers. is the generating function with radius of convergence R, which satisfies . Let be a continuous strictly monotone increasing function satisfying and mapping onto , where R and R1 may be . Furthermore, is called the transformation factor. For , let
Then we have as well as . According to the theory above, we give the following definition of S-λ basis functions.
Definition 1.
Let random variablebe an integer valued and satisfy
is n-convolution of. Its generating function is
Moreover, letbe a sequence of independent random variables with the same distribution as ξ. Let, according to the convolution formula of probability, we have
Random variableshave the probability distributions (4), which are called S-λ distributions. Denote
It can be proved that S-λ basis defined by (5) possess many properties similar to those of Bernstein basis, such as non-negativity, partition of unity, linear independence, degree elevation, etc.
Definition 2.
For any given S-λ basis functionsdefined by (5), the S-λ curves can be defined as follows [6]:
whereare control points of S-λ curves.
Similarly, the S-λ curves also possess many important properties, such as terminal properties, convex hull, interpolation and variation diminishing.
2.2. Tensor Product S-λ Basis Functions and S-λ Surface
Denote as a set of two-dimensional indicators. Let be the m-th and n-th convolution of nonnegative sequences and , respectively. Let , then denote . In terms of the definition of discrete convolution, we have
That is, sequence is the two-dimensional convolution of sequence with respect to index .
Obviously, if the generating functions of nonnegative sequences and are and , respectively, then the binary generating functions of sequences and are as below:
If are the S-λ basis functions determined by the generating function and the transformation factor , are the S-λ basis functions determined by the generating function and the transformation factor , then their tensor product S-λ basis function can be defined by
As we have done in the univariate S-λ basis function, according to the definition of convolution, we can define the tensor product S-λ basis functions by giving the binary generating function and the transformation factor directly. From the marks given above, we have the following definitions.
Definition 3.
Letbe the binary generating function satisfying,andbe two strictly monotone continuous functions onand, respectively. Then the tensor product S-λ basis function is defined as follows [7]
It is obvious that.
Tensor product S-λ basis function inherits many properties of univariate S-λ basis function, which includes nonnegativity, Partition of unity, interpolation, linear independence, etc. By using the tensor product S-λ basis function defined by (10), we can define tensor product S-λ surface as below.
Definition 4.
For a given control points sequence, the tensor product S-λ surface patch can be defined as below [7]
whereare the tensor product S-λ basis functions.
From the properties of tensor product S-λ basis function, we can obtain that tensor product S-λ surface also has most of the geometric properties of the S-λ curve, such as affine invariance, convex hull property, etc., and the boundary curve of S-λ surface is a S-λ curve.
3. Geometric Continuity Conditions for S-λ Curves and Surfaces
In the geometric design of curve and surface modeling, single curve or surface is difficult to describe complex geometric models, so it is often necessary to give multiple curves or surfaces, and then according to certain continuity conditions, these curve segments or surface patches are spliced into a complete curve or surface patch. There are two ways to measure the smooth continuity of curves and surfaces, one is parameter continuity and the other is geometric continuity. Here, we will discuss G1 and C1 continuity conditions for S-λ curves and surfaces. These smooth continuity conditions will be discussed one-by-one below.
3.1. The G1 and C1 Smooth Continuity for S-λ Curves
Given a S-λ curve where the basis functions are . In addition, the generating function and transformation factor of S-λ curve are and respectively.
Let’s solve the derivative of the S-λ curve at the initial endpoint first, that is
According to the definition of derivative
when , we have
when , we obtain
Substituting (15) and (14) into (12), we can obtain
and , so the derivative of the curve at the initial endpoint can be obtained as below
Now, let’s solve the derivative of the S-λ curve at the another endpoint, that is to say
On the basis of definition of derivative, we have
However
so we obtain
When ,
and
Consequently,
When ,
That is
Owing to
so we can obtain the conclusion
Similarly, when , notice that the highest power of molecule in is , it is much smaller than the highest power of denominator , that is mn + m, which means
Substituting (24) and (29) as well as (30) into (18), the derivative of the S-λ curve at the another endpoint can be represented as follows
Hence, the following theorems can be obtained based on the theory above.
Theorem 1.
Given two S-λ curvesandwith the control pointsand, respectively. Letandbe the generating functions of them. Moreover, transformation factor of both is. When two curves meet the following conditions
then two S-λ curves reach G1 smooth continuity at the common joint.
In particular, when in Theorem 1, the C1 smooth condition of two S-λ curves can be obtained as below.
Theorem 2.
When two S-λ curvesandsatisfy the conditions
then two S-λ curves reach C1 smooth continuity at the common joint.
3.2. The G1 and C1 Smooth Continuity for S-λ Surfaces
Given the generating functions and transformation factors . Denote
so the basis functions of tensor product S-λ surface are obtained as follows
On the basis of basis functions above, two S-λ surfaces and are defined as below:
where and are the control points of the corresponding surfaces.
Lemma 1.
Iftwo adjacent S-λ surfacesandneed to reach G1 smooth continuity in the u direction, they are required to meet the following conditions
The condition (37) means that two surface patches have a common joint, and the condition (38) requires that two surface patches have a common tangent plane at the common joint. Let’s consider the condition (37) at first. As we all know,
According to (37), we have
Owing to the linearly independence of basis functions, it must exist
In addition, (38) can be simplified as follows:
where is a positive real number.
The left side of the Equation (43) can be calculated as follows:
When , we have
then
When , we obtain
so
If , it is easy to check that
From the above calculation, we can obtain the conclusion as below
Now let’s calculate the right side of the equation (43). As we know,
and , so when , we obtain
when , we have
If , it is obvious that
Hence, by the calculation above, we can get
Based on the (43), (49) and (54), we have
Moreover, the basis function is linearly independent, so we have
where is a positive real number.
From (42) and (56), the sufficient conditions for two adjacent S-λ surfaces reach G1 continuity in the u direction can be obtained, that is Theorem 3.
Theorem 3.
Given two adjacent S-λ surface patchesas well aswith the basis functionsand, respectively. Here,
andandare the control points of the corresponding surfaces. When two S-λ surfacesandsatisfy the following conditions
the two surface patches reach G1 continuity in the u direction, whereis a positive real number.
Similarly, the following two theorems can be obtained as well.
Theorem 4.
Given two adjacent S-λ surface patchesas well aswith the basis functionsand, respectively. Here,
andandare the control points of the corresponding surfaces. Whenandsatisfy the following conditions
the two surface patches reach G1 continuity in the v direction, whereis a positive real number.
Theorem 5.
Given two adjacent S-λ surface patchesas well aswith the basis functionsand, respectively. Here,
where,andare the control points of the corresponding surfaces. Whenandsatisfy the following conditions:
the two surface patches reach G1 continuity in the u and v direction, whereis a positive real number.
Whenin Theorem 3 to Theorem 5, the two S-λ surfaces reach C1 continuity in the splicing direction.
4. Numeric Examples
Example 1.
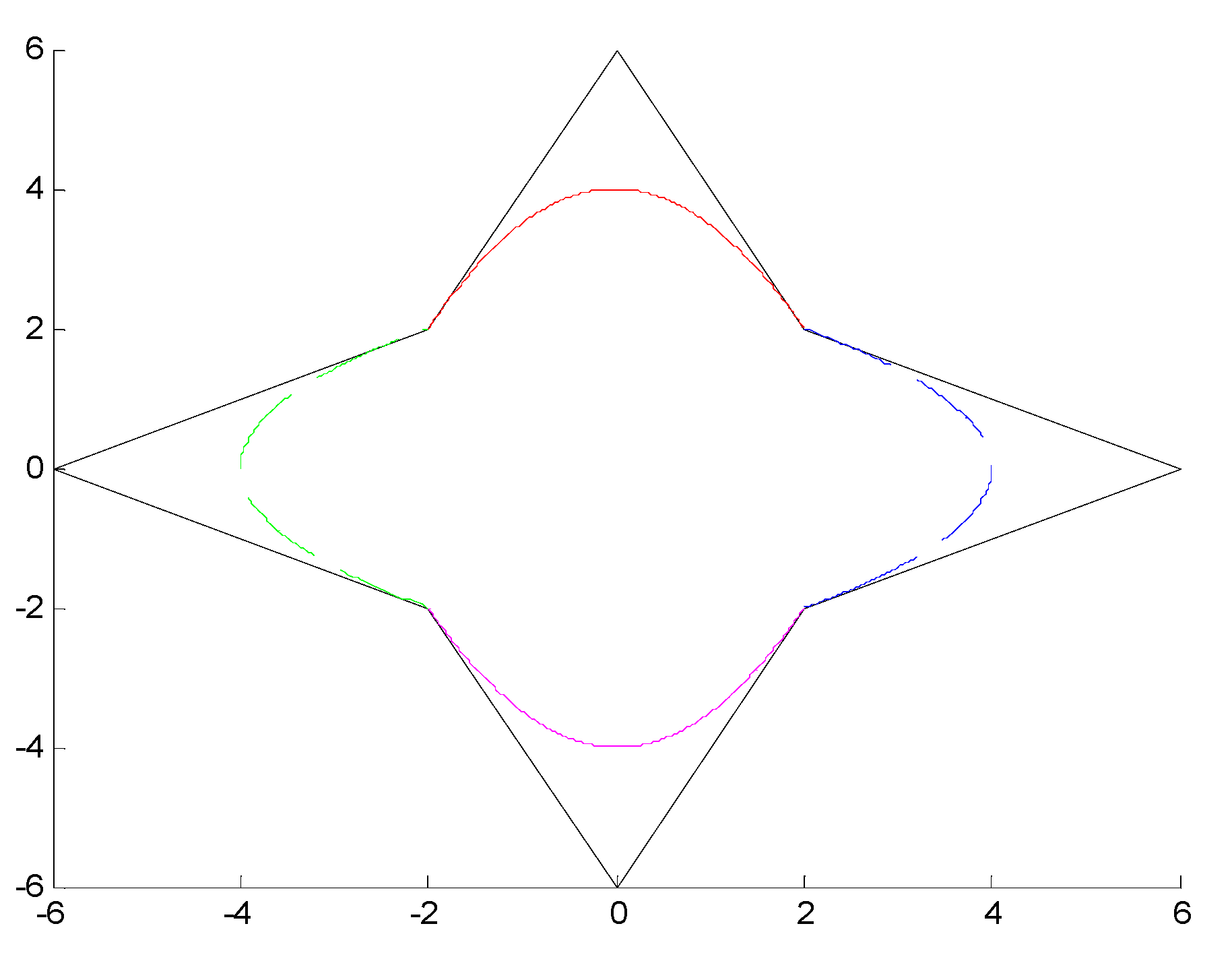
Figure 1 shows an example of G0 (namely C0) smooth continuity of four quadratic S-λ curves with the generating functions. The corresponding sets of control points are {(−2,2), (0,6), (2,2)}, {(2,2), (6,0), (2,−2)}, {(2,−2), (0,−6), (−2,−2) } {(−2,−2), (−6,0), (−2,2)}, respectively.
Example 2.
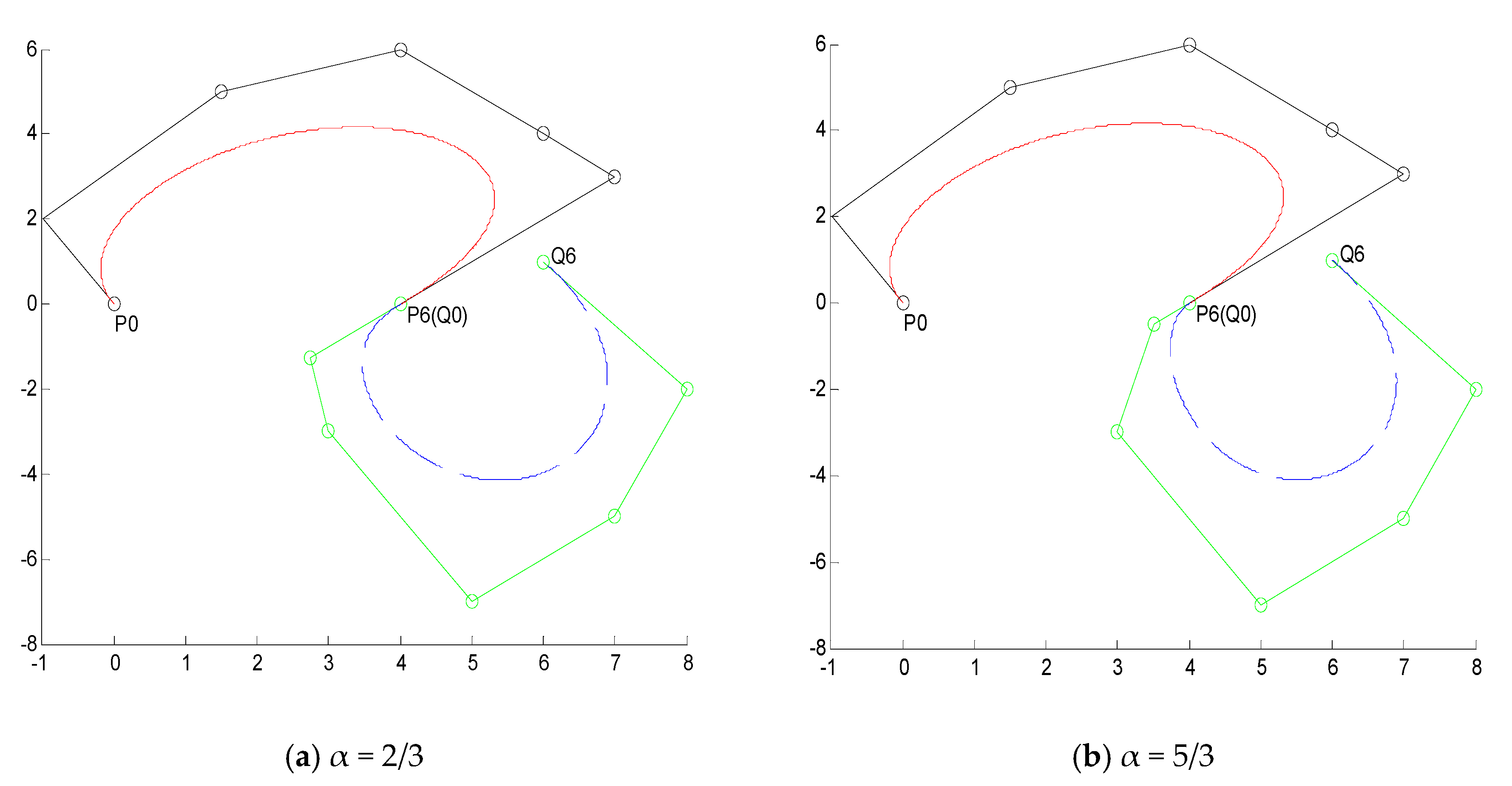
Figure 2 displays a modeling example to demonstrate the G1 smooth continuity between two S-λ curves of degree 6 and modifies the shape of composite surface by changing the ratio of tangent vector without changing the continuous conditions. In Figure 2, the red curves represent the original curves, the blue curves are the constructed curveswhich satisfy the G1 smooth continuity conditions, that is (32). The generating functions ofandareand, respectively. In Figure 2a, the set of control points of S-λ curveandare P = {(0,0), (−1,2), (1.5,5), (4,6), (6,4), (7,3), (4,0)}, Q = {(4,0), (33/12,−5/4), (3,−3), (5,−7), (7,−5), (8,−2), (6,1)}. In addition, the ratio of tangent vector of two S-λ curves is α = 2/3. In Figure 2b, we take α = 5/3, the control points of S-λ curve remain unchanged, the set of control points of S-λ curve is changed to Q = {(4,0), (7/2,−1/2), (3,−3), (5,−7), (7,−5), (8,−2), (6,1)}.
Example 3.
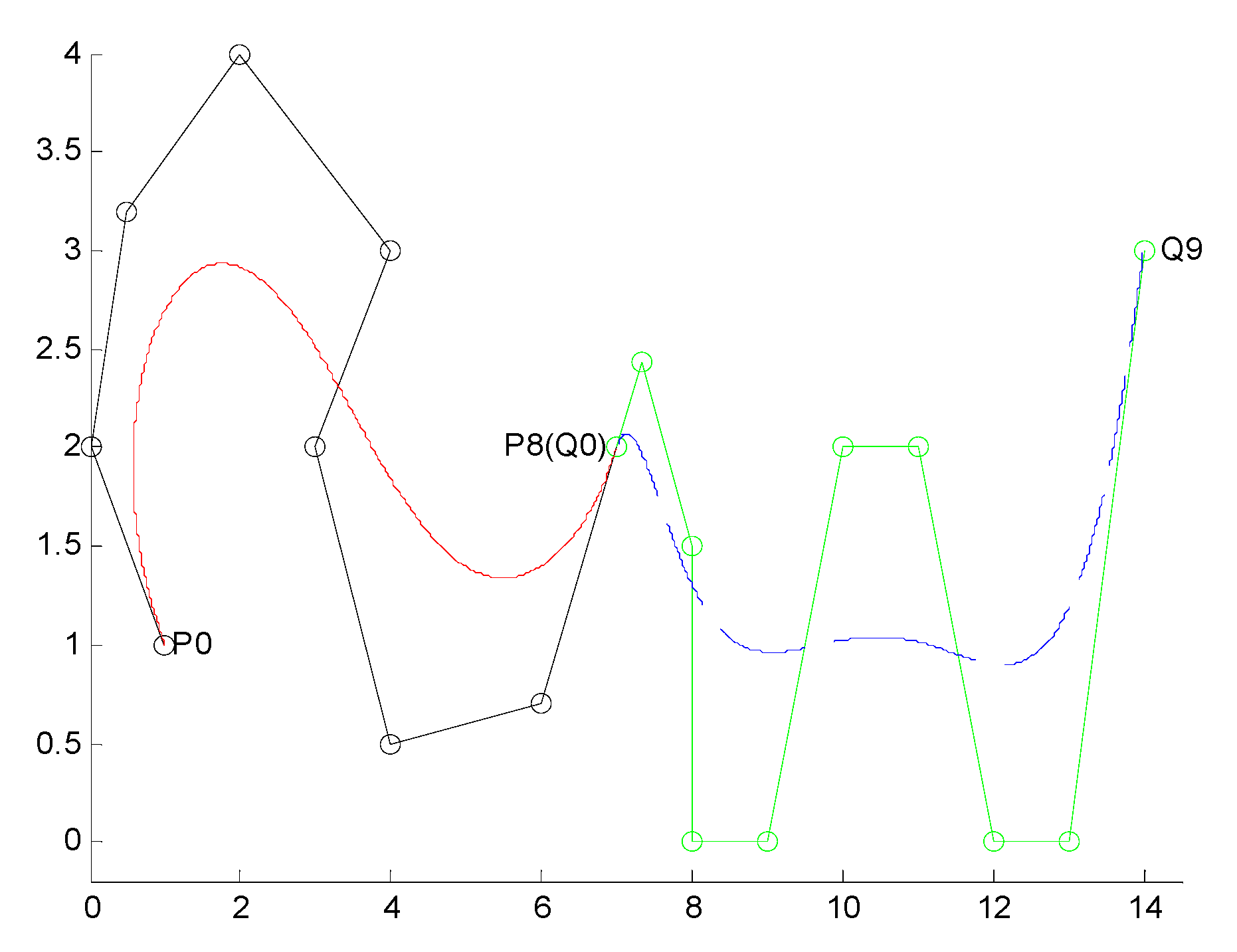
Figure 3 shows an example to illustrate the C1 smooth continuity between a S-λ curve of degree 8 and a S-λ curve of degree 9. The generating functions ofandareand. The sets of control points of S-λ curveandare P = {(1,1), (0,2), (0.5,3.2), (2,4), (4,3), (3,2), (4,0.5), (6,0.7), (7,2)}, Q = {(7,2), (22/3,73/30), (8,1.5), (8,0), (9,0), (10,2), (11,2), (12,0), (13,0), (14,3)}, respectively.
Example 4.
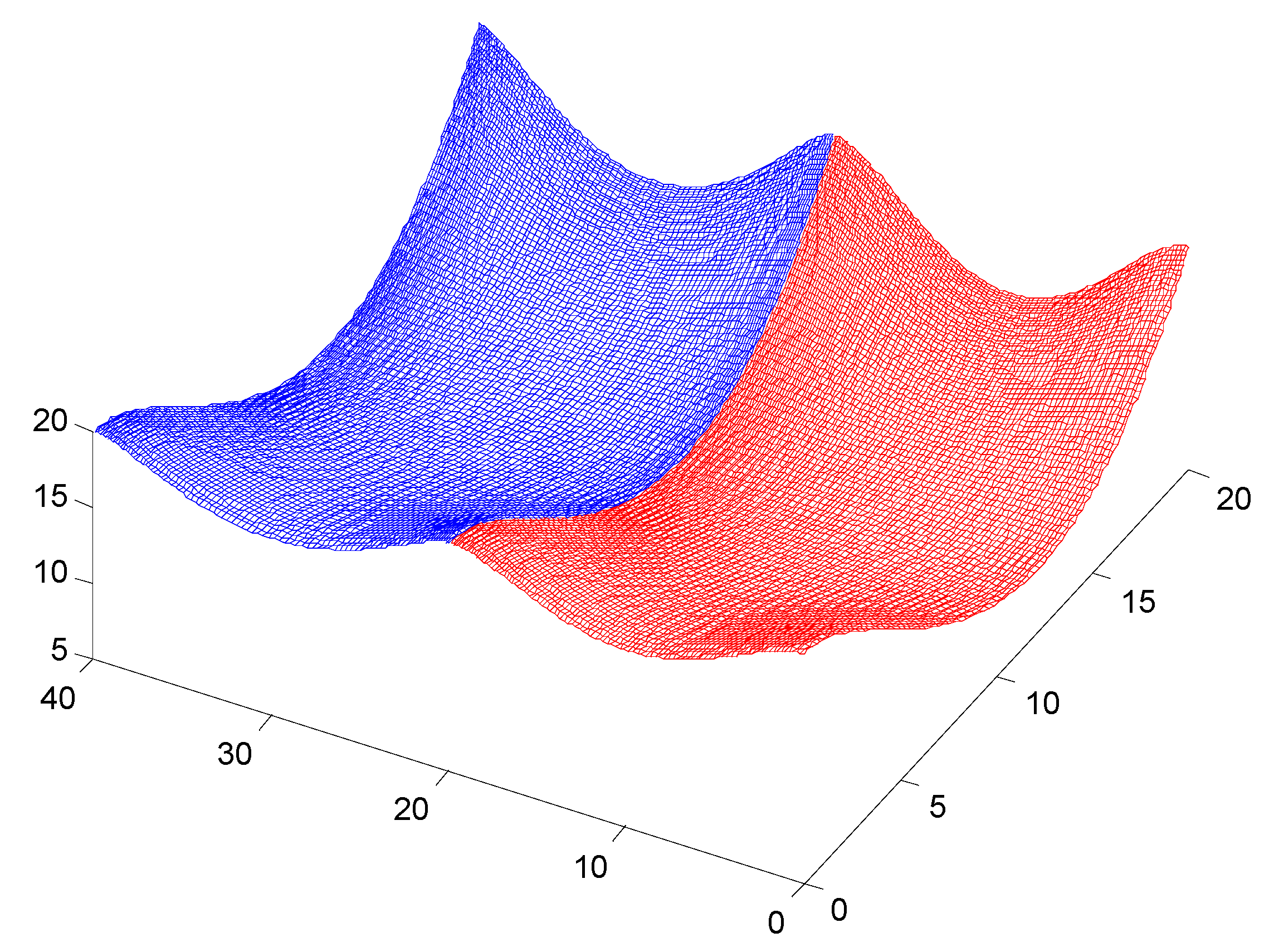
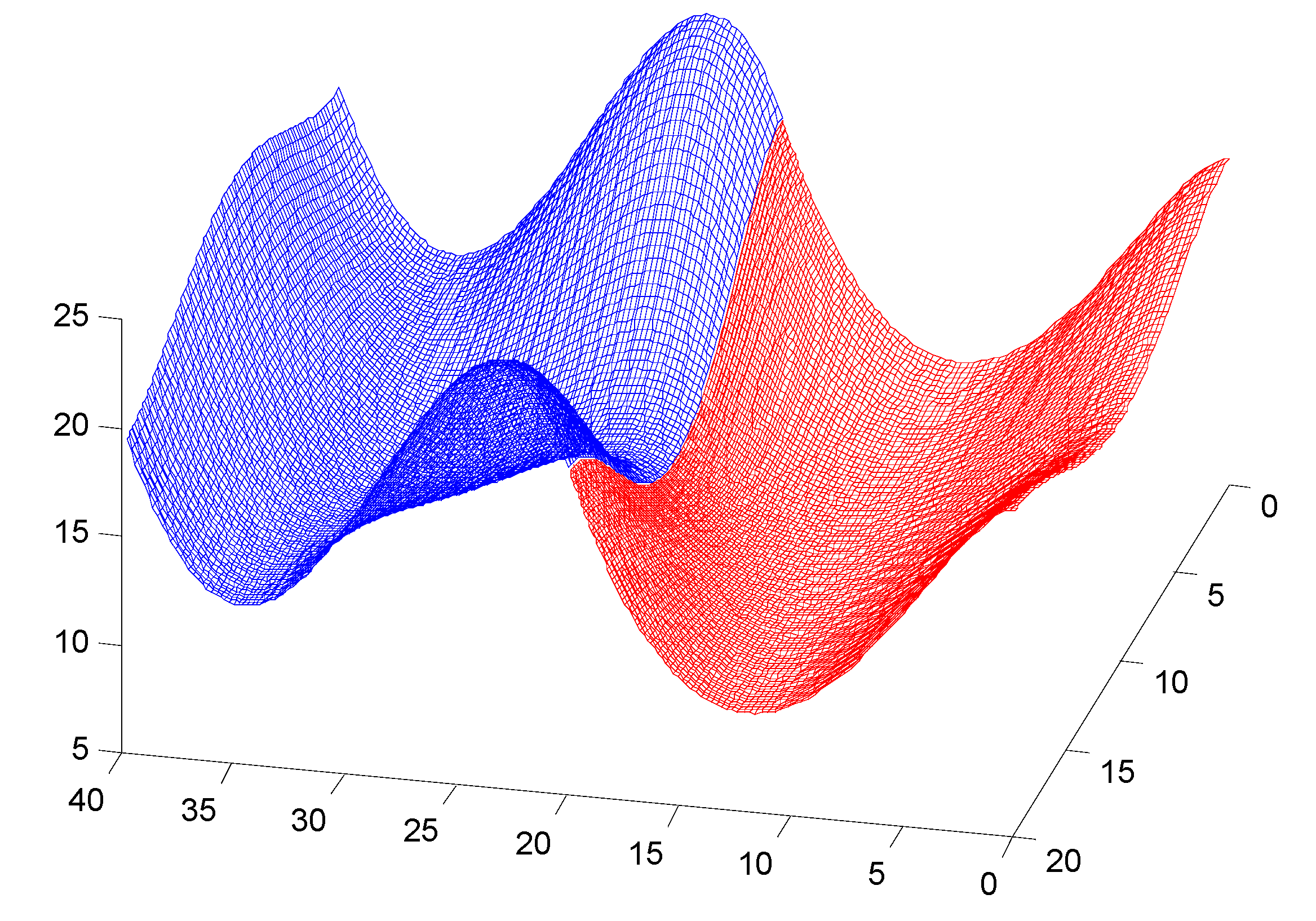
Figure 4 displays a modeling example to illustrate the G1 smooth continuity in the u direction between two S-λ surfaces. In Figure 4, the red mesh surface represents the original surface, the blue mesh surface is the constructed surfacewhich satisfies the G1 smooth continuity conditions in the u direction, that is Equation (57). In addition, the basis functions ofandareand, where
and
The control points of S-λ surfacesandare {(0,0,20), (0,5,20), (0,10,10), (0,15,20), (0,20,20); (5,0,20), (5,5,20), (5,10,10), (5,15,20), (5,20,20); (10,0,0), (10,5,0), (10,10,10), (10,15,0), (10,20,0); (15,0,5), (15,5,5), (15,10,15),(15,15,5), (15,20,5); (20,0,20), (20,5,20),(20,10,0), (20,15,20), (20,20,20)} and {(0,20,20), (0,25,20), (0,30,10), (0,35,20), (0,40,20); (5,20,20), (5,25,20), (5,30,10), (5,35,20), (5,40,20); (10,20,0), (10,25,0), (10,30,10), (10,35,0), (10,40,0); (15,20,5), (15,25,5), (15,30,15), (15,35,5), (15,40,5); (20,20,20), (20,25,20), (20,30,0), (20,35, 20), (20,40,20)}, respectively.
Example 5.
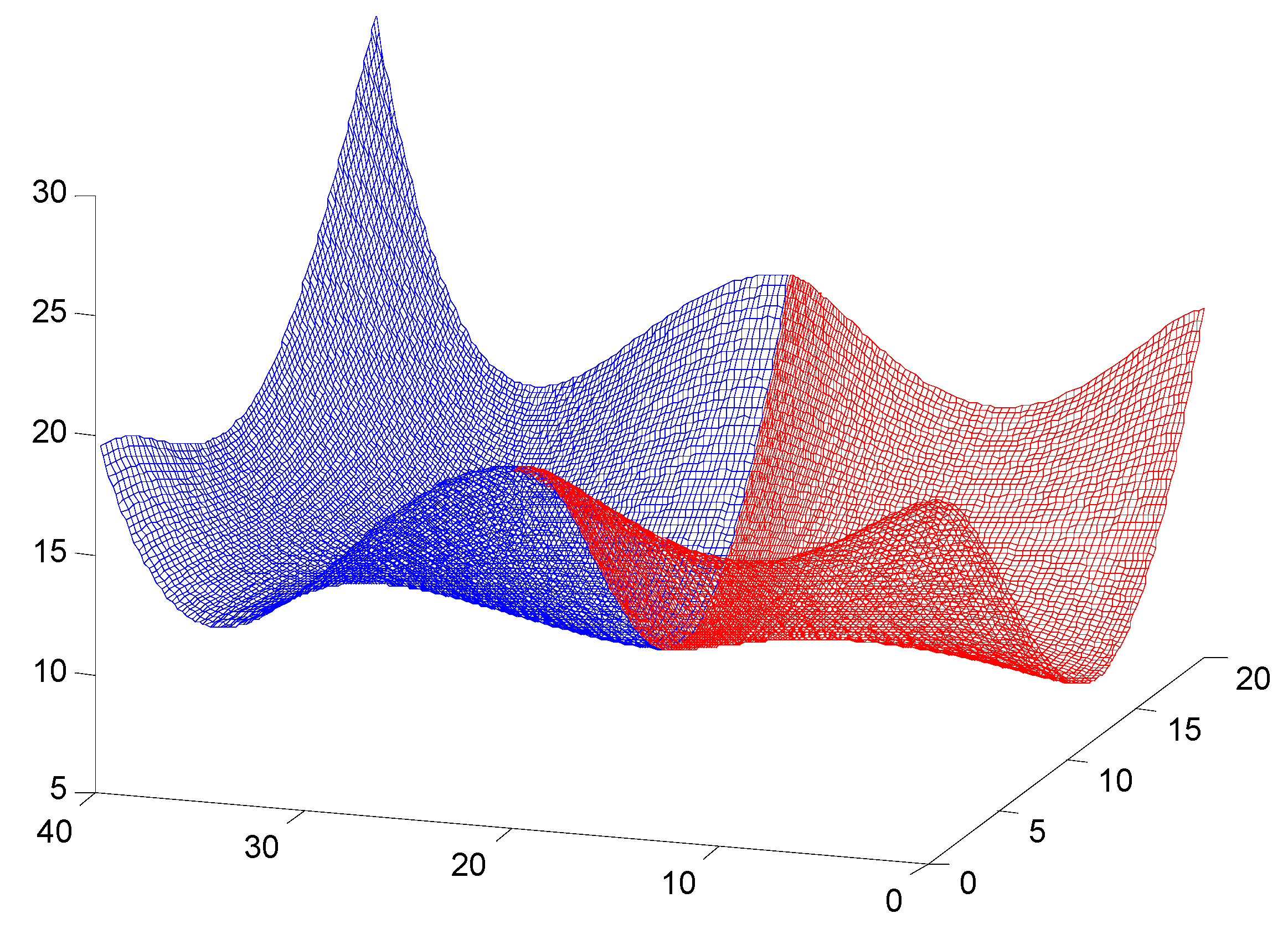
Figure 5 shows a modeling example to demonstrate the G1 smooth continuity in the v direction between two S-λ surfaces. In Figure 5, the red mesh surface represents the original surface, the blue mesh surface is the constructed surfacewhich satisfies the G1 smooth continuity conditions in the v direction, that is Equation (58). In addition, the basis functions ofandareand, where
and
The control points of S-λ surfacesandare {(0,0,20), (0,5,20), (0,10,10), (0,15,20), (0, 20,20); (5,0,20), (5,5,20), (5,10,10), (5,15,20), (5,20,20); (10,0,0), (10,5,0), (10,10,10), (10,15,0), (10, 20,0); (15,0,5), (15,5,5), (15,10,15), (15,15,5), (15,20,5); (20,0,20), (20,5,20), (20,10,0), (20,15,20), (20,20,20)} and {(20,0,20), (20,5,20), (20,10,0), (20,15,20), (20,20,20); (25,0,35), (25,5,35), (25,10,−15), (25,15,35), (25,20,35); (30,0,10), (30,5,10), (30,10,0), (30,15,10), (30,20,10); (35,0,5), (35,5,5), (35,10,15), (35,15,5), (35,20,5); (40,0,20), (40,5,20), (40,10,30), (40,15, 20), (40,20,20)}.
Example 6.
Figure 6 shows an example to display the G1 smooth continuity in the u and v direction between two S-λ surfaces. In Figure 6, the red mesh surface represents the original surface, the blue mesh surface is the constructed surfacewhich satisfies the G1 continuity conditions in the u and v direction, that is (59). Furthermore, the basis functions ofandareand, where
and
The control points of S-λ surfacesandare {(0,0,20), (0,5,20), (0,10,10), (0,15,20), (0,20,20); (5,0,20), (5,5,20), (5,10,10), (5,15,20), (5,20,20); (10,0,0), (10,5,0), (10,10,10), (10,15,0), (10,20,0); (15,0,5), (15,5,5), (15,10,15), (15,15,5), (15,20,5); (20,0,20), (20,5,20), (20,10,0), (20,15,20), (20,20,20)} and {(0,20,20), (5,20,20), (10,20,0), (15,20,5), (20,20,20); (0,25,20), (5,25,20), (10,25,0), (15,25,5), (20,25, 20); (0,30,15), (5,30,15), (10,30,10), (15,30,5), (20,30,15); (0,35,5), (5,35,5), (10,35,15), (15,35,5), (20,35,5); (0,40,20), (5,40,20), (10,40,10), (15,40,20), (20,40,30)}.
5. Conclusions
In this paper, we introduced the S-λ curves and surfaces and derived the geometric conditions for G1 smooth continuity between two adjacent S-λ curves and surfaces, respectively. In addition—in terms of the proposed continuity conditions—some modeling examples are provided to verify the effectiveness of the method. In summary, the research in this paper not only provides a unified method for dealing with common geometric models (such as the Bézier model, the B-spline model and the Poisson model), but also provides a practical technology with distinctive characteristics for the CAGD system. The advantages of the S-λ model can be summarized as follows:
- (a)
- (b)
- For any composite S-λ curves and surfaces which satisfy G1 or C1 geometric continuity, its local and global shape can be adjusted flexibly by modifying the shape parameters without changing the control points;
- (c)
- S-λ model can be transformed into different geometric models when the generating functions and transformation factors of the S-λ basis functions are different, so the research of this paper plays an important role in the complex modeling design of other common geometric models as well.
It is noteworthy that the G1 geometric continuity conditions of S-λ curves and surfaces are studied for the first time in this paper. We will focus on studying the G2 geometric continuity conditions of S-λ model in future work. In addition, some interesting directions for future research would be to implement the performance and esthetics comparison of S-λ methods with other methods.
Author Contributions
Conceptualization, G.H., M.A. and K.T.M.; data curation, G.H., H.L., M.A. and G.W.; formal analysis, H.L. and G.W.; funding acquisition, G.H., M.A. and K.T.M.; investigation, G.H., H.L., K.T.M. and G.W.; methodology, G.H. and H.L.; project administration, G.H. and K.T.M.; resources, G.H. and M.A.; software, H.L. and G.W.; supervision, G.H., M.A. and K.T.M.; validation, H.L.; visualization, K.T.M.; writing—original draft, G.H., H.L. and G.W.; writing—review & editing, M.A. and K.T.M. All authors read and approved the final manuscript.
Funding
This research was supported by the National Natural Science Foundation of China (No.51875454). This research was also funded by JST CREST Grant No. JPMJCR1911, JSPS Grant-in-Aid for Scientific Research (B) Grant No. 19H02048 and JSPS Grant-in-Aid for Challenging Exploratory Research Grant No. 26630038.
Acknowledgments
We thank to the anonymous reviewers for their insightful suggestions and recommendations, which led to the improvements of presentation and content of the paper.
Conflicts of Interest
The authors declare that there is no conflicts of interests regarding the publication of this paper.
References
- Johnson, N.L.; Kemp, A.W.; Kotz, S. Univariate Discrete Distributions; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Poston, W.L.; Johnson, N.L.; Kotz, S. Discrete Multivariate Distributions; Wiley: Hoboken, NJ, USA, 1998; Volume 40, p. 160. [Google Scholar]
- Goldman, R.N. Urn models and B-splines. Constr. Approx. 1988, 4, 265–288. [Google Scholar] [CrossRef]
- Goldman, R.N. The rational Bernstein bases and the multirational blossoms. Comput. Aided Geom. Des. 1999, 16, 701–738. [Google Scholar] [CrossRef]
- Morin, G.; Goldman, R.N. A subdivision scheme for Poisson curves and surfaces. Comput. Aided Geom. Des. 2000, 17, 813–833. [Google Scholar] [CrossRef]
- Fan, F.L.; Zeng, X.M. S-λ basis functions and S-λ curves. Comput. Aided Des. 2012, 44, 1049–1055. [Google Scholar] [CrossRef]
- Zhou, G.R.; Zeng, X.M.; Fan, F.L. Bivariate S-λ bases and S-λ surface patches. Comput. Aided Geom. Des. 2014, 31, 674–688. [Google Scholar] [CrossRef]
- Lu, J.; Qin, X.Q. Degree Reduction of S-λ Curves Using a Genetic Simulated Annealing Algorithm. Symmetry 2018, 11, 15. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.N.; Zhao, C.; Zeng, X.M. A New Shape Adjustment Method of S-λ Curve. Comput. Aided Draft. Des. Manuf. 2014, 24, 39–43. [Google Scholar]
- Zeng, X.M.; Lin, L. On limiting properties of Bernstein–Trotter type operator. J. Math. Study 1994, 27, 200–203. [Google Scholar]
- Zhao, J.H. Quantify behaviors of approximation degree to unbounded functions by generalized Feller operators derived S–λ. Acta Math. Sci. 1997, 17, 466–472. [Google Scholar]
- Shi, F.Z. Computer Aided Geometric Design and NURBS; China Higher Education Press: Beijing, China, 2001. [Google Scholar]
- Liu, D.; Hoschek, J. GC1 continuity conditions between adjacent rectangular and triangular Bezier surface patches. Comput. Aided Des. 1989, 21, 194–200. [Google Scholar] [CrossRef]
- Degen, W.L.F. Explicit continuity conditions for adjacent Bézier surface patches. Comput. Aided Geom. Des. 1990, 7, 181–189. [Google Scholar] [CrossRef]
- Liu, D.Y. GC1 continuity conditions between two adjacent rational Bézier surface patches. Comput. Aided Geom. Des. 1990, 7, 151–163. [Google Scholar] [CrossRef]
- Chui, C.K.; Lai, M.J.; Lian, J.A. Algorithms for G1 connection of multiple parametric bicubic NURBS surfaces. Numer. Algorithms 2000, 23, 285–313. [Google Scholar] [CrossRef]
- Konno, K.; Tokuyama, Y.; Chiyokura, H. A G1 connection around complicated curve meshes using C1 NURBS Boundary Gregory Patches. Comput. Aided Des. 2001, 33, 293–306. [Google Scholar] [CrossRef]
- Yu, P.Q.; Shi, X.Q. G1 continuous conditions for bicubic NURBS surfaces. J. Dalian Univ. Technol. 2004, 44, 330–333. [Google Scholar]
- Wu, L.S.; Gao, X.Q.; Xiong, H. Improved curve surface seamless splicing based on NURBS. Opt. Precis. Eng. 2013, 21, 431–436. [Google Scholar]
- Hu, G.; Zhang, G.; Wu, J.L.; Qin, X.Q. A novel extension of the Bézier model and its applications to surface modeling. Adv. Eng. Softw. 2018, 125, 27–54. [Google Scholar] [CrossRef]
- Hu, G.; Bo, C.; Wu, J.; Wei, G.; Hou, F. Modeling of free-form complex curves using SG-Bézier curves with constraints of geometric continuities. Symmetry 2018, 10, 545. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Bo, C.C.; Wei, G.; Qin, X.Q. Shape-adjustable generalized Bézier Surfaces: Construction and its geometric continuity conditions. Appl. Math. Comput. 2020, 378, 125215. [Google Scholar]
- Hu, G.; Bo, C.C.; Qin, X.Q. Continuity conditions for Q-Bézier curves of degree n. J. Inequalities Appl. 2017, 115, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Bo, C.; Qin, X. Continuity conditions for tensor product Q-Bézier surfaces of degree (m, n). Comp. Appl. Math. 2018, 37, 4237–4258. [Google Scholar] [CrossRef]
- Qian, J.; Tang, Y. The application of H-Bézier-like curves in engineering. Numer. Methods Comput. Appl. 2007, 28, 167–178. [Google Scholar]
- Usman, M.; Abbas, M.; Miura, K.T. Some engineering applications of new trigonometric cubic Bezier-like curves to free-form complex curve modeling. J. Adv. Mech. Des. Syst. 2020, 14, jamdsm0048. [Google Scholar] [CrossRef] [Green Version]
- Bibi, S.; Abbas, M.; Miura, K.T.; Misro, M.Y. Geometric Modeling of Novel Generalized Hybrid Trigonometric Bézier-Like Curve with Shape Parameters and Its Applications. Mathematics 2020, 8, 967. [Google Scholar] [CrossRef]
- Li, F.; Hu, G.; Abbas, M.; Miura, K.T. The generalized H-Bézier model: Geometric continuity conditions and applications to curve and surface modeling. Mathematics 2020, 8, 924. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L. Generalized quartic H-Bézier curves: Construction and application to developable surfaces. Adv. Eng. Softw. 2019, 138, 102723. [Google Scholar] [CrossRef]
- Hu, G.; Cao, H.X.; Zhang, S.X.; Wei, G. Developable Bézier-like surfaces with multiple shape parameters and its continuity conditions. Appl. Math. Model. 2017, 45, 728–747. [Google Scholar] [CrossRef]
Figure 1.
G0(also C0) smooth continuity of quadratic S-λ curves.

Figure 2.
G1 smooth continuity of two sextic S-λ curves.

Figure 3.
C1 smooth continuity of S-λ curves.

Figure 4.
G1 smooth continuity of two S-λ surfaces in the u direction.

Figure 5.
G1 smooth continuity of two S-λ surfaces in the v direction.

Figure 6.
G1 smooth continuity of two S-λ surfaces in the u and v direction.

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hu, G.; Li, H.; Abbas, M.; Miura, K.T.; Wei, G. Explicit Continuity Conditions for G1 Connection of S-λ Curves and Surfaces. Mathematics 2020, 8, 1359. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081359
AMA Style
Hu G, Li H, Abbas M, Miura KT, Wei G. Explicit Continuity Conditions for G1 Connection of S-λ Curves and Surfaces. Mathematics. 2020; 8(8):1359. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081359
Chicago/Turabian StyleHu, Gang, Huinan Li, Muhammad Abbas, Kenjiro T. Miura, and Guoling Wei. 2020. "Explicit Continuity Conditions for G1 Connection of S-λ Curves and Surfaces" Mathematics 8, no. 8: 1359. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081359
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.