Improved Performance of M-Class PMUs Based on a Magnitude Compensation Model for Wide Frequency Deviations

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Theoretical Background
2.1. IEEE Std. C37.118.1
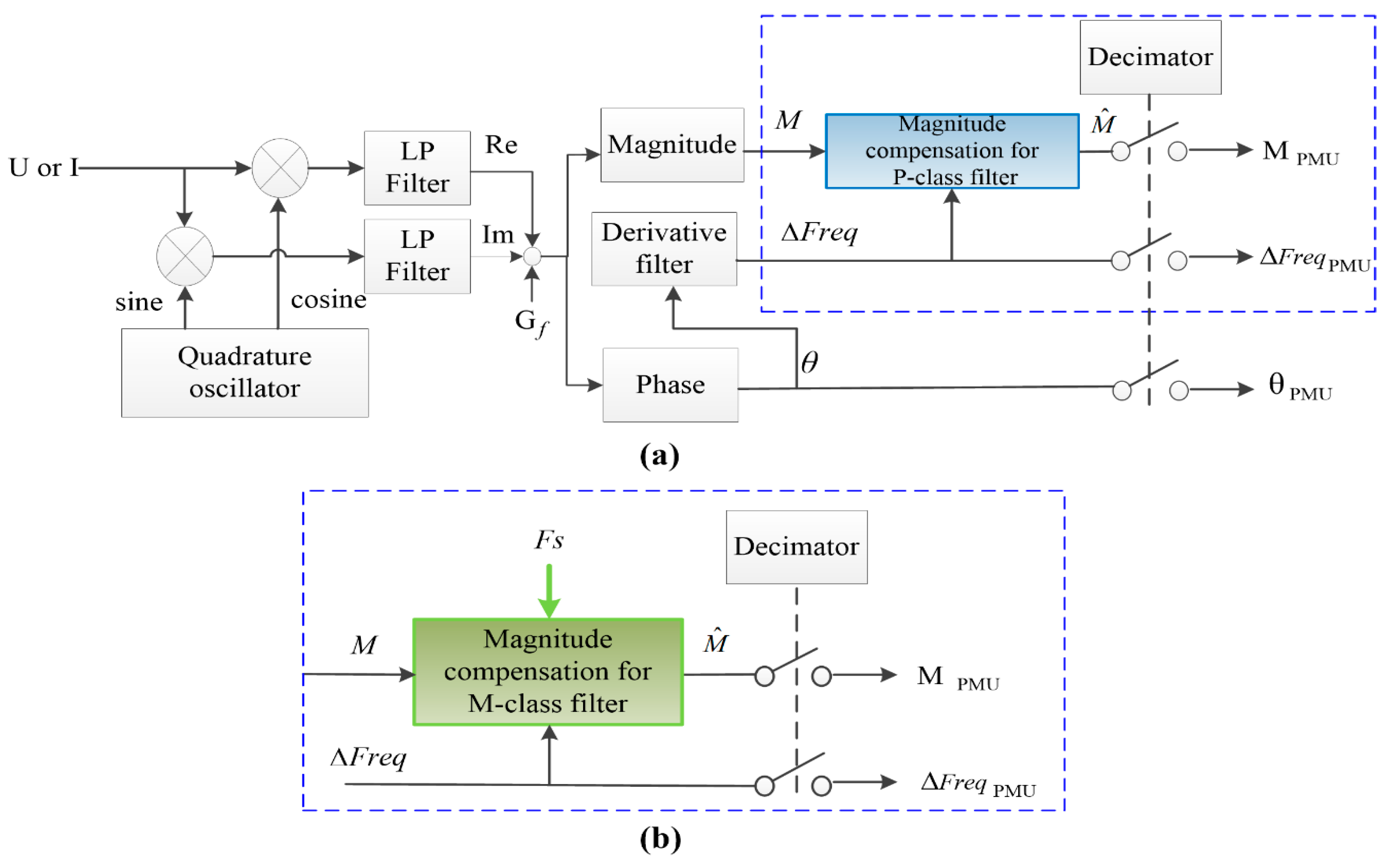
2.2. M-Class Filter
2.3. Steady-State and Dynamic Tests
2.4. Applications Related to Wide Frequency Deviations
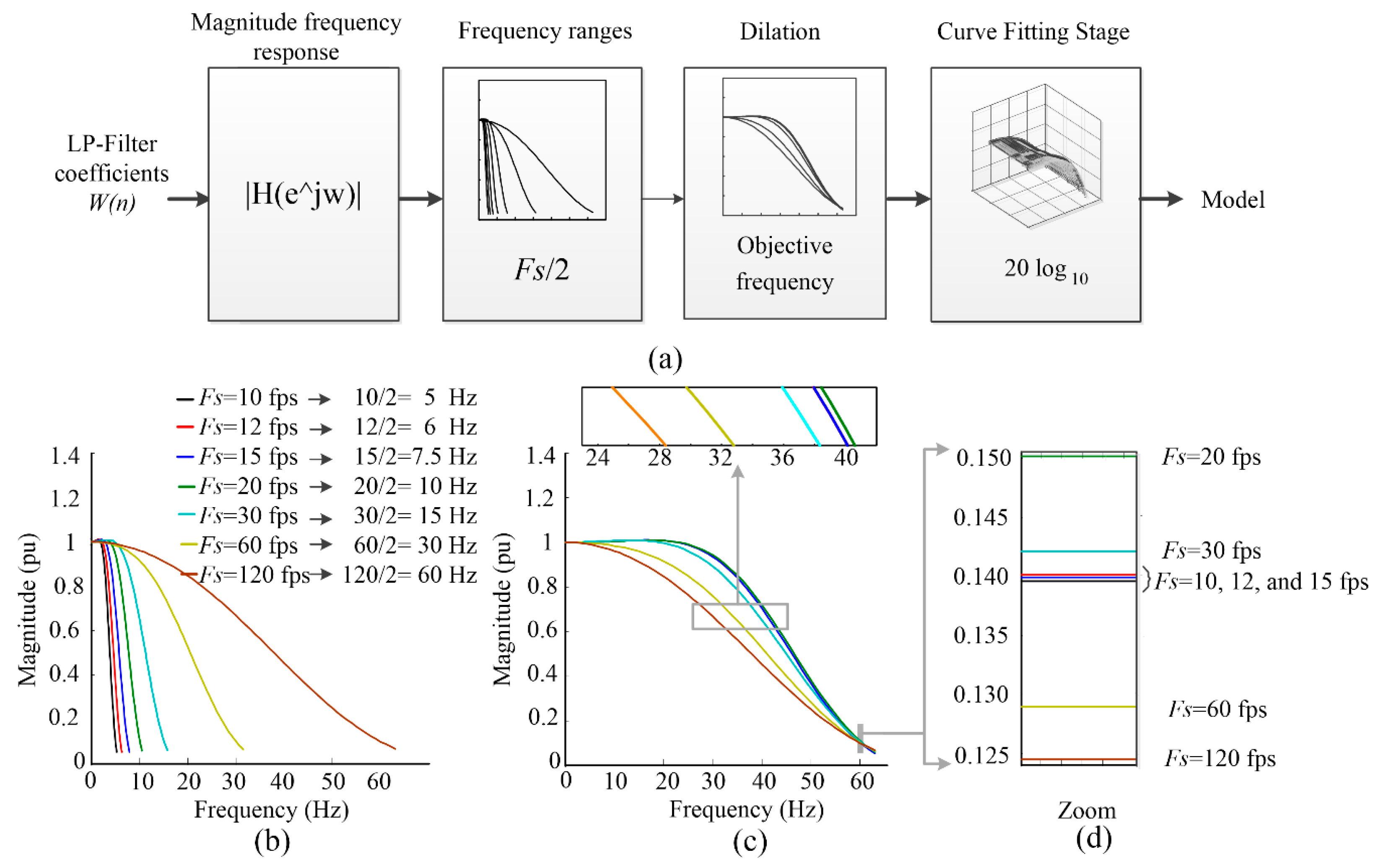
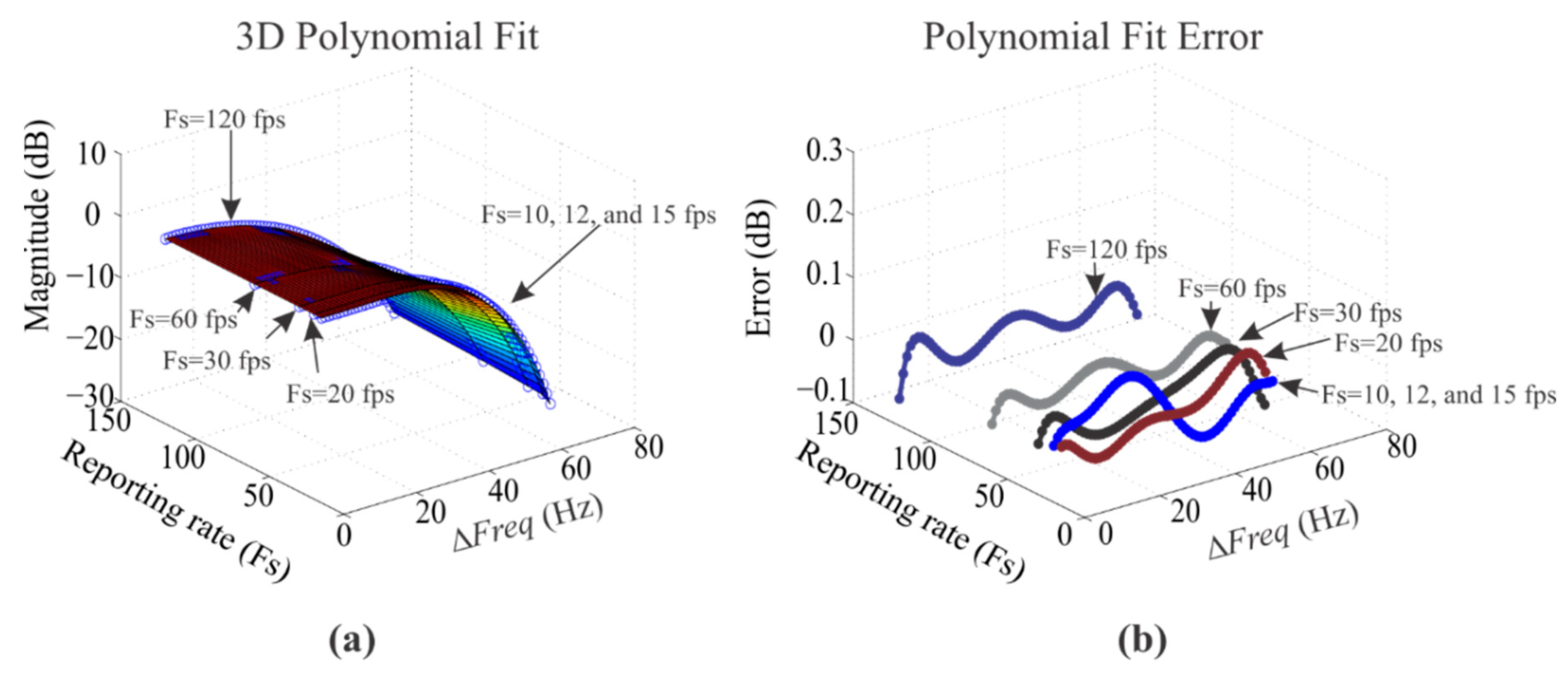
3. Proposed Methodology to Obtain the Compensation Model
4. Experimentation and Results
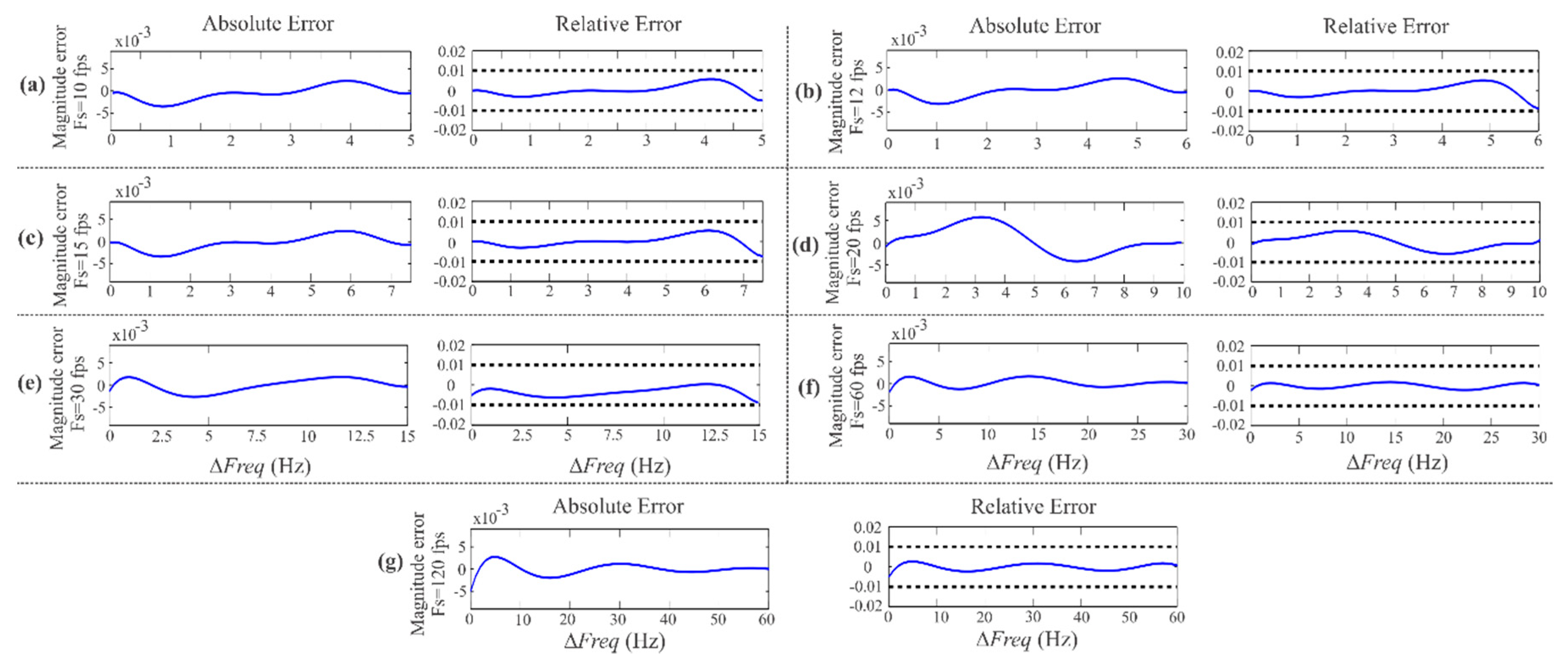
4.1. Model Results
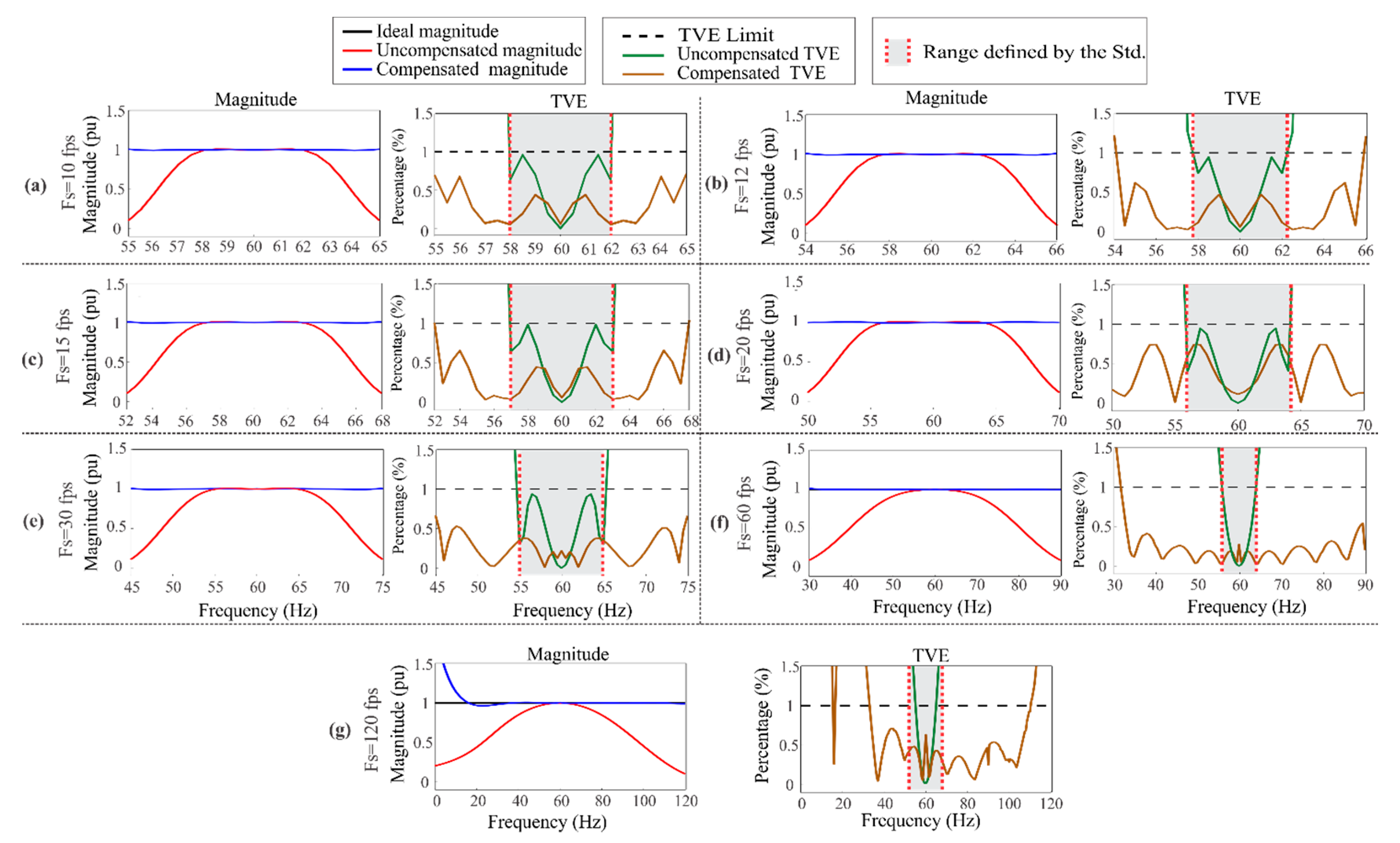
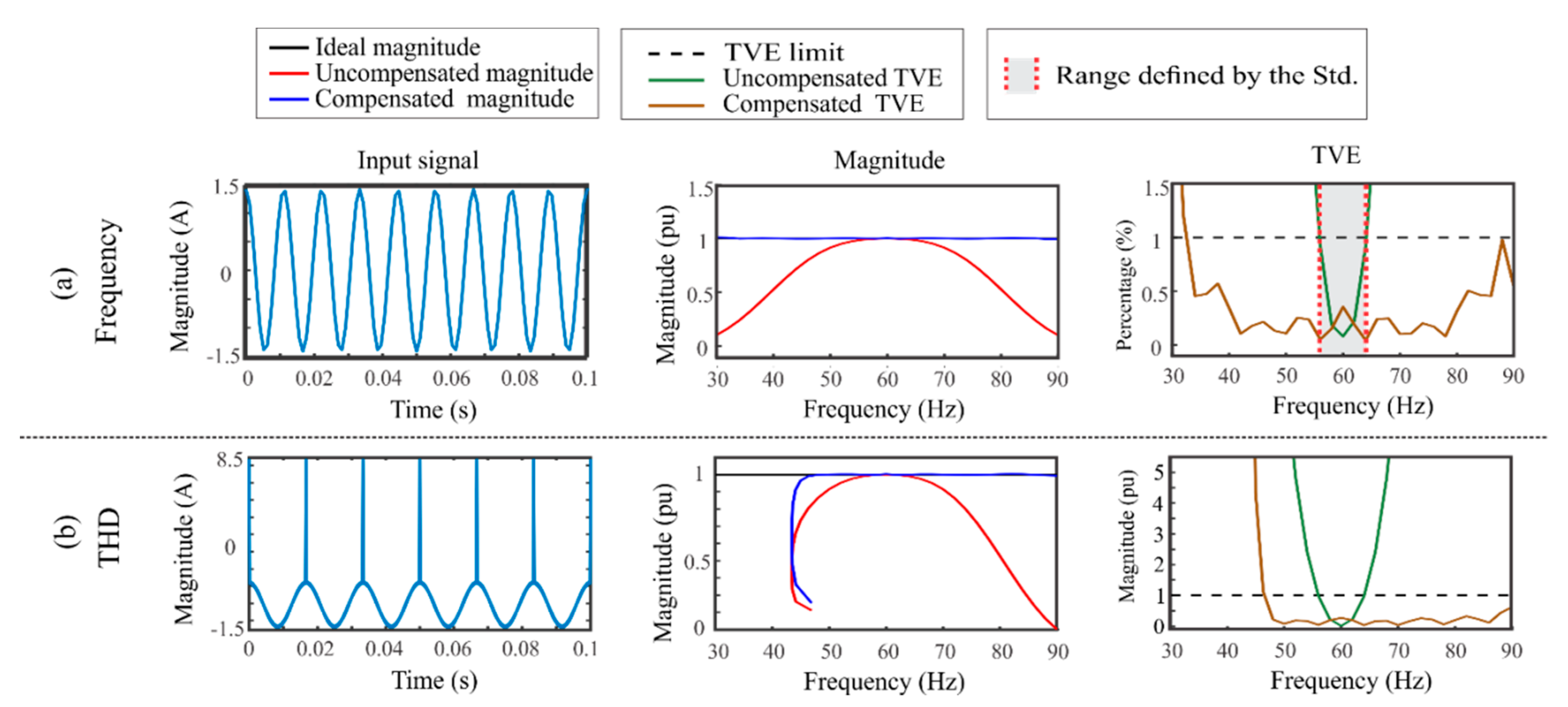
4.2. Steady-State Test
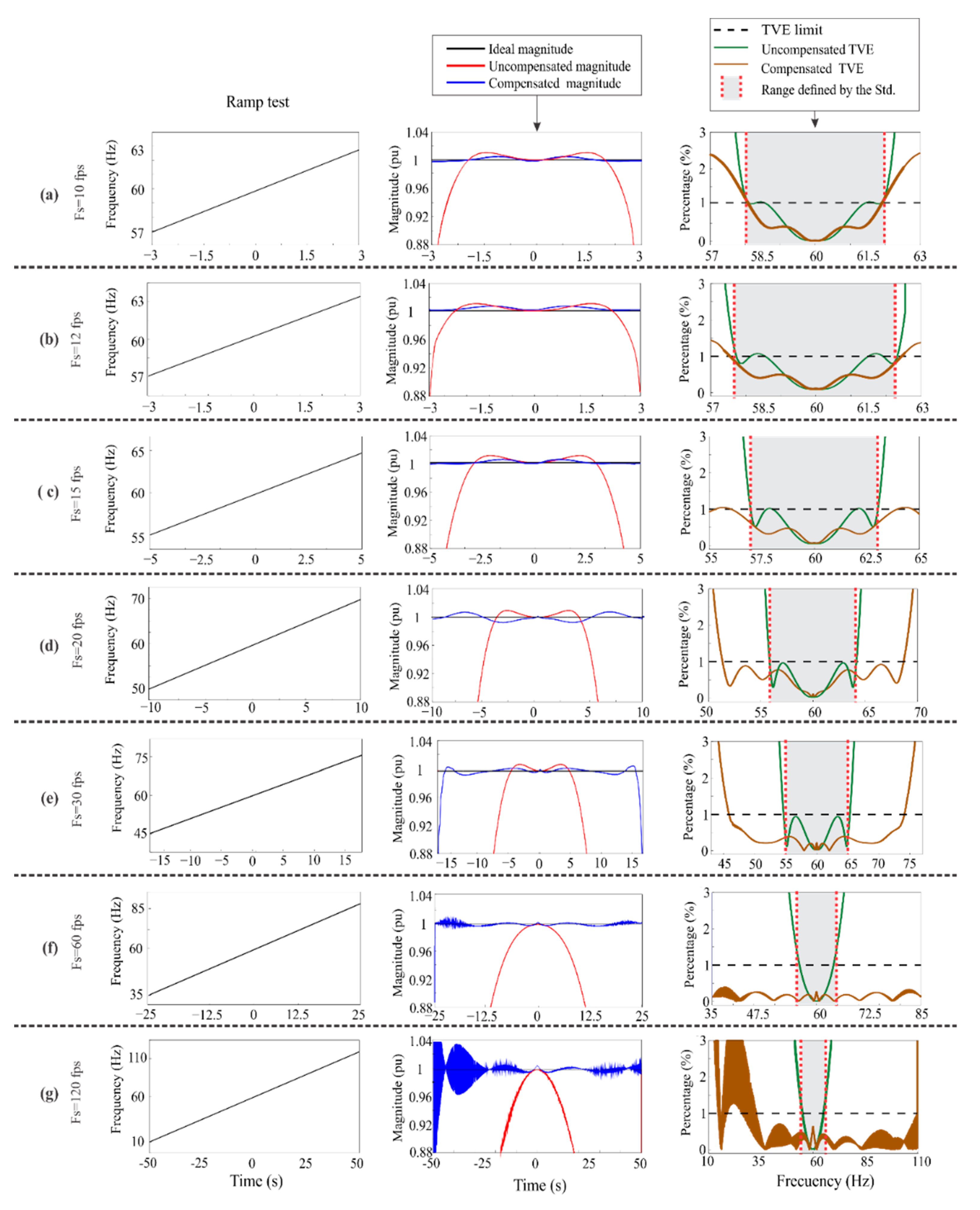
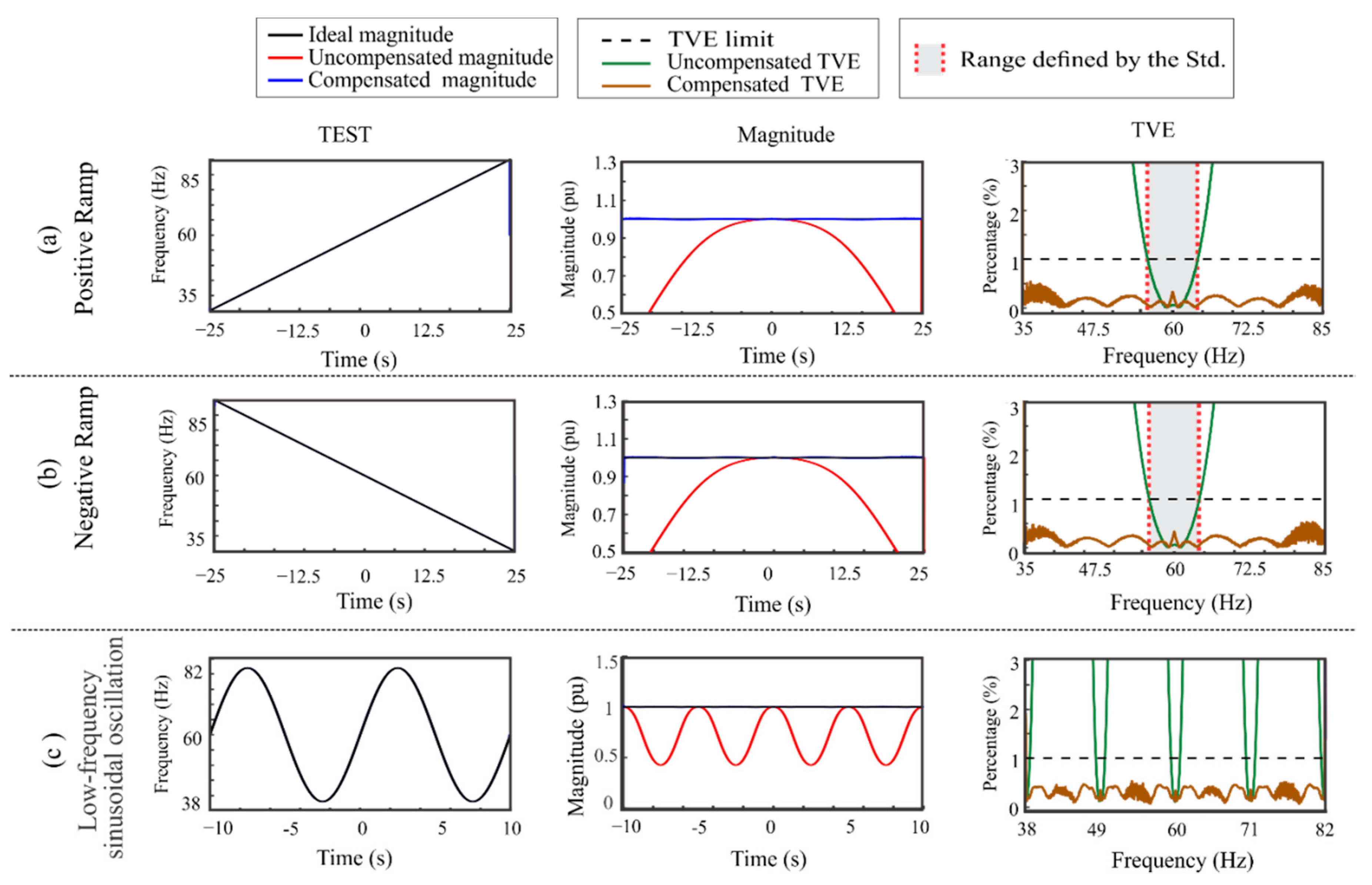
4.3. Dynamic Test: Linear Frequency Ramp
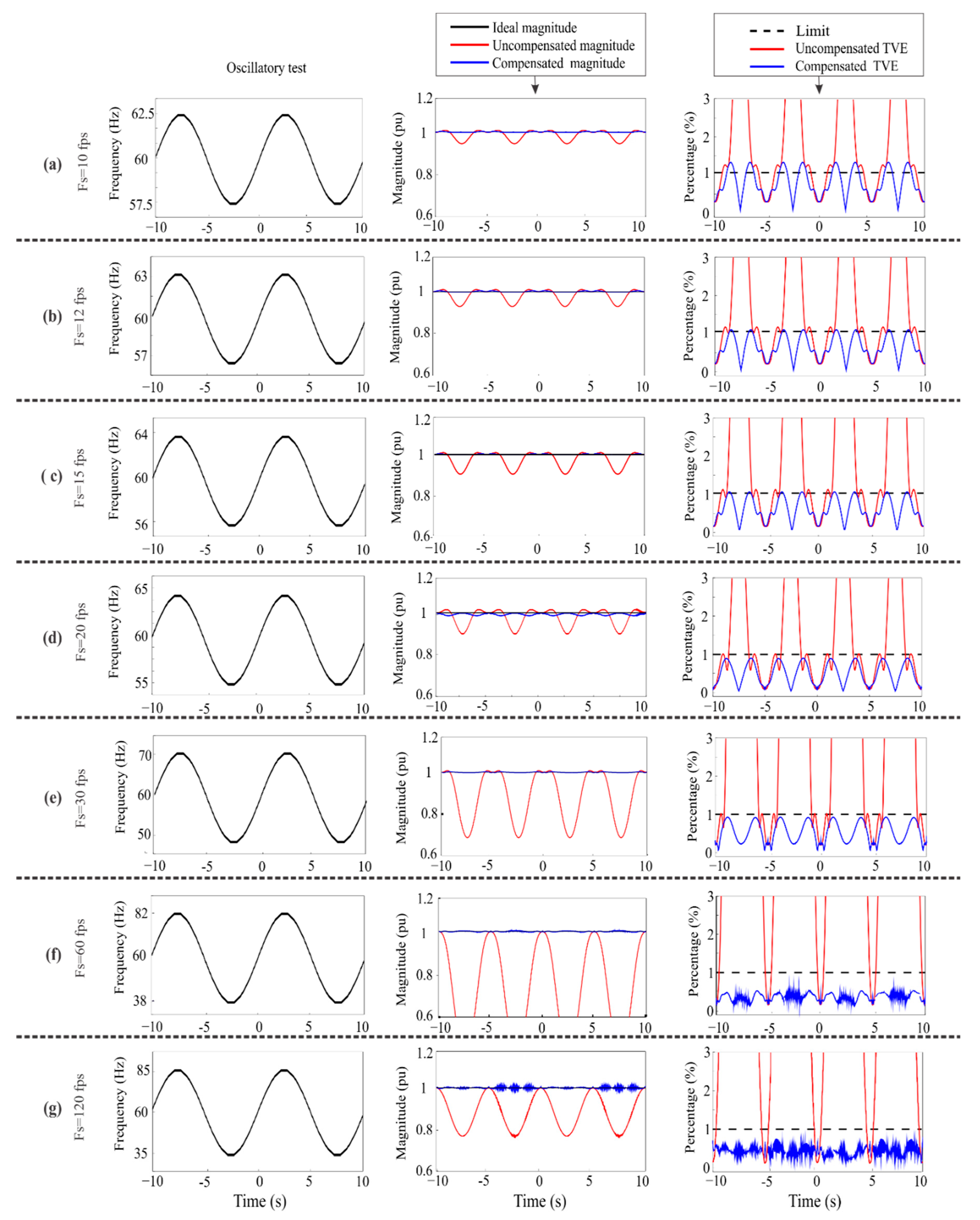
4.4. Dynamic Test: Sinusoidal Frequency Variation
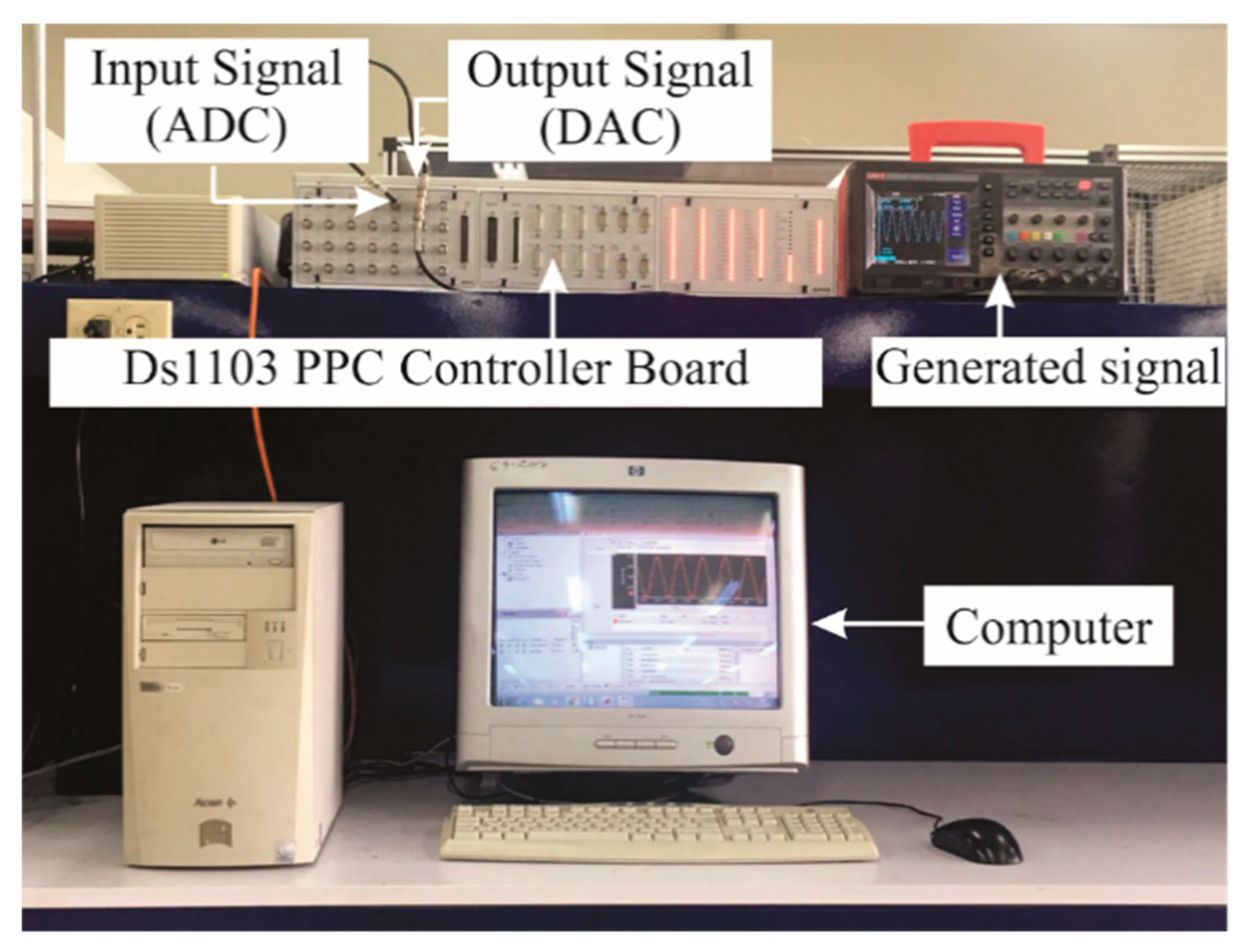
4.5. Signals in a Real Time Digital Simulator (RTD)
4.6. Comparison for M-Class Algorithms
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Roscoe, A.J.; Abdulhadi, I.F.; Burt, G.M. P and M class phasor measurement unit algorithms using adaptive cascaded filters. IEEE Trans. Power Deliv. 2013, 28, 1447–1459. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Cui, B.; Mallikeswaran, A.; Banerjee, P.; Srivastava, A.K. A review of synchrophasor applications in smart electric grid. Wiley Interdiscip. Rev. Energy Environ. 2017, 6, e223. [Google Scholar] [CrossRef]
- Grigoraș, G.; Neagu, B.-C.; Gavrilaș, M.; Triștiu, I.; Bulac, C. Optimal Phase Load Balancing in Low Voltage Distribution Networks Using a Smart Meter Data-Based Algorithm. Mathematics 2020, 8, 549. [Google Scholar] [CrossRef] [Green Version]
- Razo-Hernandez, J.R.; Mejia-Barron, A.; Granados-Lieberman, D.; Valtierra-Rodriguez, M.; Gomez-Aguilar, J.F. A New Phasor Estimator for PMU Applications: P Class and M Class. J. Mod. Power Syst. Clean Energy 2020, 8, 55–66. [Google Scholar] [CrossRef]
- Granados-Lieberman, D. Global Harmonic Parameters for Estimation of Power Quality Indices: An Approach for PMUs. Energies 2020, 13, 2337. [Google Scholar] [CrossRef]
- Power, I.; Society, E. C37.118.1-2011—IEEE Standard for Synchrophasor Measurements for Power Systems; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Srivastava, A.; Biswas, S. Synchrophasor Device Testing and Related Standards. In Smart Grid Handbook; John Wiley & Sons, Ltd.: Chichester, UK, 2016; pp. 1–24. [Google Scholar]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Wide frequency range adaptive phasor and frequency PMU algorithms. IEEE Trans. Smart Grid 2014, 5, 569–579. [Google Scholar] [CrossRef]
- Georgilakis, P.S. Technical challenges associated with the integration of wind power into power systems. Renew. Sustain. Energy Rev. 2008, 12, 852–863. [Google Scholar] [CrossRef] [Green Version]
- Granados-Lieberman, D.; Valtierra-Rodriguez, M.; Morales-Hernandez, L.; Romero-Troncoso, R.; Osornio-Rios, R. A Hilbert Transform-Based Smart Sensor for Detection, Classification, and Quantification of Power Quality Disturbances. Sensors 2013, 13, 5507–5527. [Google Scholar] [CrossRef] [Green Version]
- Nanda, S.; Dash, P.K.; Chakravorti, T.; Hasan, S. A quadratic polynomial signal model and fuzzy adaptive filter for frequency and parameter estimation of nonstationary power signals. Meas. J. Int. Meas. Confed. 2016, 87, 274–293. [Google Scholar] [CrossRef]
- Ferrero, A. Measuring electric power quality: Problems and perspectives. Meas. J. Int. Meas. Confed. 2008, 41, 121–129. [Google Scholar] [CrossRef]
- Kušljević, M.D.; Tomić, J.J.; Marčetić, D.P. Active power measurement algorithm for power system signals under non-sinusoidal conditions and wide-range frequency deviations. IET Gener. Transm. Distrib. 2009, 3, 57–65. [Google Scholar] [CrossRef]
- Chang, Y.; Liu, R.; Ba, Y.; Li, W. A New Control Logic for a Wind-Area on the Balancing Authority Area Control Error Limit Standard for Load Frequency Control. Energies 2018, 11, 121. [Google Scholar] [CrossRef] [Green Version]
- Giray, M.M.; Sachdev, M.S. Off-Nominal Frequency Measurements in Electric power systems. IEEE Power Eng. Rev. 1989, 9, 42–43. [Google Scholar] [CrossRef]
- Kundu, P.; Pradhan, A.K. Wide area measurement based protection support during power swing. Int. J. Electr. Power Energy Syst. 2014, 63, 546–554. [Google Scholar] [CrossRef]
- Guan, M.; Pan, W.; Zhang, J.; Hao, Q.; Cheng, J.; Zheng, X. Synchronous Generator Emulation Control Strategy for Voltage Source Converter (VSC) Stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Compliance analysis of PMU algorithms and devices for wide-area stabilizing control of large power systems. IEEE Trans. Power Syst. 2013, 28, 1766–1778. [Google Scholar] [CrossRef]
- Cuesta, A.; Gomez-Gil, F.; Fraile, J.; Rodríguez, J.; Calvo, J.; Vara, J. Feasibility of a Simple Small Wind Turbine with Variable-Speed Regulation Made of Commercial Components. Energies 2013, 6, 3373–3391. [Google Scholar] [CrossRef] [Green Version]
- Silva, R.P.M.; Delbem, A.C.B.; Coury, D.V. Genetic algorithms applied to phasor estimation and frequency tracking in PMU development. Int. J. Electr. Power Energy Syst. 2013, 44, 921–929. [Google Scholar] [CrossRef]
- Sa-ngawong, N.; Ngamroo, I. Intelligent photovoltaic farms for robust frequency stabilization in multi-area interconnected power system based on PSO-based optimal Sugeno fuzzy logic control. Renew. Energy 2015, 74, 555–567. [Google Scholar] [CrossRef]
- Chakir, M.; Kamwa, I.; Le Huy, H. Extended C37.118.1 PMU algorithms for joint tracking of fundamental and harmonic phasors in stressed power systems and microgrids. IEEE Trans. Power Deliv. 2014, 29, 1465–1480. [Google Scholar] [CrossRef]
- Bi, T.; Liu, H.; Feng, Q.; Qian, C.; Liu, Y. Dynamic phasor model-based synchrophasor estimation algorithm for M-class PMU. IEEE Trans. Power Deliv. 2015, 30, 1162–1171. [Google Scholar] [CrossRef]
- Chauhan, K.; Reddy, M.V.; Sodhi, R. A novel distribution-level phasor estimation algorithm using empirical wavelet transform. IEEE Trans. Ind. Electr. 2018, 65, 7984–7995. [Google Scholar] [CrossRef]
- Tosato, P.; Macii, D.; Luiso, M.; Brunelli, D.; Gallo, D.; Landi, C. A Tuned Lightweight Estimation Algorithm for Low-Cost Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2018, 67, 1047–1057. [Google Scholar] [CrossRef]
- Xu, S.; Liu, H.; Bi, T.; Martin, K.E. An improved Taylor weighted least squares method for estimating synchrophasor. Int. J. Electr, Power Energy Syst. 2020, 120, 105987. [Google Scholar] [CrossRef]
- Roscoe, A.J. Exploring the relative performance of frequency-tracking and fixed-filter phasor measurement unit algorithms under C37.118 test procedures, the effects of interharmonics, and initial attempts at merging P-Class response with M-Class filtering. IEEE Trans. Instrum. Meas. 2013, 62, 2140–2153. [Google Scholar] [CrossRef] [Green Version]
- Phadke, A.G.; Kasztenny, B. Synchronized phasor and frequency measurement under transient conditions. IEEE Trans. Power Deliv. 2009, 24, 89–95. [Google Scholar] [CrossRef]
- Warichet, J.; Sezi, T.; Maun, J.C. Considerations about synchrophasors measurement in dynamic system conditions. Int. J. Electr. Power Energy Syst. 2009, 31, 452–464. [Google Scholar] [CrossRef]
- Ren, J.; Kezunovic, M.; Stenbakken, G. Characterizing dynamic behavior of PMUs using step signals. Eur. Trans. Electr. Power 2011, 21, 1496–1508. [Google Scholar] [CrossRef]
- Gurusinghe, D.R.; Rajapakse, A.D.; Narendra, K. Testing and enhancement of the dynamic performance of a phasor measurement unit. IEEE Trans. Power Deliv. 2014, 29, 1551–1560. [Google Scholar] [CrossRef]
- Castello, P.; Lixia, M.; Muscas, C.; Pegoraro, P.A. Impact of the model on the accuracy of synchrophasor measurement. IEEE Trans. Instrum. Meas. 2012, 61, 2179–2188. [Google Scholar] [CrossRef]
- Shah, N.N.; Joshi, S.R. Utilization of DFIG-based wind model for robust damping of the low frequency oscillations in a single SG connected to an infinite bus. Int. Trans. Electr. Energy Syst. 2019, 29, e2761. [Google Scholar] [CrossRef]
- Seo, W.S.; Kang, S.H.; Nam, S.R. Non-recursive Discrete Fourier Transform-Based Frequency Estimation of the Power System. J. Electr. Eng. Technol. 2019, 14, 1505–1515. [Google Scholar] [CrossRef]
- Nam, S.-R.; Kang, S.-H.; Kang, S.-H. Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method. Energies 2014, 8, 79–93. [Google Scholar] [CrossRef]
- Bamigbade, A.; Khadkikar, V.; al Hosani, M.; Zeineldin, H.H.; el Moursi, M.S. Gain compensation approach for low-voltage ride-through and dynamic performance improvement of three-phase type-3 PLL. IET Power Electr. 2020, 13, 1613–1621. [Google Scholar] [CrossRef]
- Razo-Hernandez, J.R.; Valtierra-Rodriguez, M.; Granados-Lieberman, D.; Tapia-Tinoco, G.; Rodriguez-Rodriguez, J.R. A phasor estimation algorithm based on Hilbert transform for P-class PMUs. Adv. Electr. Comput. Eng. 2018, 18, 97–104. [Google Scholar] [CrossRef]
- Martin, K.E.; Hamai, D.; Adamiak, M.G.; Anderson, S.; Begovic, M.; Benmouyal, G.; Brunello, G.; Burger, J.; Cai, J.Y.; Dickerson, B.; et al. Exploring the IEEE standard C37.118-2005 synchrophasors for power systems. IEEE Trans. Power Deliv. 2008, 23, 1805–1811. [Google Scholar] [CrossRef]
- Fan, D.; Centeno, V. Phasor-based synchronized frequency measurement in power systems. IEEE Trans. Power Deliv. 2007, 22, 2010–2016. [Google Scholar] [CrossRef]
- Howlader, A.M.; Sadoyama, S.; Roose, L.R.; Chen, Y. Active power control to mitigate voltage and frequency deviations for the smart grid using smart PV inverters. Appl. Energy 2020, 258, 114000. [Google Scholar] [CrossRef]
- Liu, X.; Laverty, D.M.; Best, R.J.; Li, K.; Morrow, D.J.; McLoone, S. Principal Component Analysis of Wide-Area Phasor Measurements for Islanding Detection—A Geometric View. IEEE Trans. Power Deliv. 2015, 30, 976–985. [Google Scholar] [CrossRef]
- Samantaray, S.R.; Kamwa, I.; Joos, G. Phasor measurement unit based wide-area monitoring and information sharing between micro-grids. IET Gener. Transm. Distrib. 2017, 11, 1293–1302. [Google Scholar] [CrossRef]
- Kamwa, I.; Pradhan, A.K.; Joos, G. Adaptive phasor and frequency-tracking schemes for wide-area protection and control. IEEE Trans. Power Deliv. 2011, 26, 744–753. [Google Scholar] [CrossRef]
- Siti, M.W.; Tungadio, D.H.; Sun, Y.; Mbungu, N.T.; Tiako, R. Optimal frequency deviations control in microgrid interconnected systems. IET Renew. Power Gener. 2019, 13, 2376–2382. [Google Scholar] [CrossRef]
- Marzebali, M.H.; Mazidi, M.; Mohiti, M. An adaptive droop-based control strategy for fuel cell-battery hybrid energy storage system to support primary frequency in stand-alone microgrids. J. Energy Storage 2020, 27, 101127. [Google Scholar] [CrossRef]
- Cao, J.; Du, W.; Wang, H.; McCulloch, M. Optimal Sizing and Control Strategies for Hybrid Storage System as Limited by Grid Frequency Deviations. IEEE Trans. Power Syst. 2018, 33, 5486–5495. [Google Scholar] [CrossRef]
- Liu, Y.; Du, W.; Xiao, L.; Wang, H.; Cao, J. A method for sizing energy storage system to increase wind penetration as limited by grid frequency deviations. IEEE Trans. Power Syst. 2016, 31, 729–737. [Google Scholar] [CrossRef]
- Lay, D. Linear Algebra and Its Applications, 4th ed.; Pearson Education: Boston, MA, USA, 2012. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steady-State Test | Dynamic Test | ||
|---|---|---|---|
| Description | Steady state signals with different ΔFreq | Linear frequency ramp | Sinusoidal frequency variations |
| Range | ±2.0 Hz for Fs < 10; ±Fs/5 for 10 ≤ Fs ≤ 25; ±5 Hz for Fs ≥ 25 | Lesser of ±(Fs/5) or ±5 Hz | No defined |
| Limit errors | TVE = 1% | TVE = 1% | No defined |
| Coefficients | ||||
|---|---|---|---|---|
| C0,0 = 0 | C5,0 = 2.20676 × 10−7 | C0,6 = −1.4120 × 10−9 | C5,1 = 2.10556 × 10−10 | C1,3 = 2.15466 × 10−6 |
| C1,0 = −6.0525 × 10−2 | C0,1 = 3.7635 × 10−4 | C1,1 = 6.66086 × 10−3 | C1,2 = −1.86745 × 10−4 | C2,3 = 1.50529 × 10−7 |
| C2,0 = −3.28595 × 10−3 | C0,2 = −6.57461 × 10−5 | C2,1 = 1.83899 × 10−4 | C2,2 = −1.04144 × 10−5 | C3,3 = −5.62059 × 10−12 |
| C30 = 3.4396 × 10−4 | C0,3 = 1.2709 × 10−6 | C3,1 = −9.29113 × 10−7 | C3,2 = 2.05616 × 10−8 | C1,4 = −8.33054 × 10−9 |
| C4,0 = −1.5051 × 10−4 | C0,4 = −6.51693 × 10−9 | C4,1 = 2.07606 × 10−8 | C4,2 = −3.06276 × 10−10 | C2,4 = −6.75353 × 10−10 |
| Reporting Rate (fps) | 10 | 12 | 15 | 20 | 30 | 60 | 120 |
|---|---|---|---|---|---|---|---|
| Range established by the IEEE Std. C37.118.1 (Hz) | ±2 | ±2.4 | ±3 | ±4 | ±5 | ±5 | ±5 |
| Range with the proposal (Hz) | ±5 | ±6 | ±8 | ±10 | ±15 | ±30 | +60, −23 |
| Reporting Rate (fps) | 10 | 12 | 15 | 20 | 30 | 60 | 120 |
|---|---|---|---|---|---|---|---|
| Range established by the IEEE Std. C37.118.1 (Hz) | ±2 | ±2.3 | ±3 | ±4 | ±5 | ±5 | ±5 |
| Range with the proposal (Hz) | ±2 | ±2.5 | ±4 | ±8.5 | ±14 | ±26 | 35 to 100 |
| Amplitude Step Test | Phase Step Test | Frequency Deviation Steady-State Test | Positive Ramp Test | Negative Ramp Test | IEEE Std. C37.118.1: Fs/RT limit/TVE limit | Frequency Range | |
|---|---|---|---|---|---|---|---|
| Algorithm M-Class | Response Time [ms] | Response Time [ms] | TVE [%] | TVE [%] | TVE [%] | ||
| Complex filters [4] | 49 | 58 | 2.6 × 10−5 | 0.0953 | 0.0953 | 60 fps 79 ms 1% | 60 ±5 Hz |
| Adaptive extended Kalman Filtering [8] | 65.1 | 17.85 | 0 | NR | NR | 60 fps 79 ms 1% | 60 ±15 Hz |
| Second-order Taylor [23] | 32 | 37 | 0.123 | 0.021 | NR | 50 fps 199 ms 1% | 50 ±5 Hz |
| Empirical wavelet transform [24] | 17.8 | 17.8 | 9.7 × 10−4 | 1.4 × 10−4 | NR | 50 fps 199 ms 1% | 50 ±5 Hz |
| Interpolated DFT and Taylor Fourier Transform [25] | NR | NR | 0.01 | 0.02 | 0.02 | 50 fps 199 ms 1% | 50 ±5 Hz |
| Improved Taylor weighted least square [26] | 52 | 32 | 1.1 × 10−5 | 0.003 | 0.003 | 100 fps 50 ms 1% | 50 ±5 Hz |
| Real value Taylor weighted least square [26] | 84 | 39 | 1.158 | 1.156 | 1.156 | 100 fps 50 ms 1% | 50 ±5 Hz |
| DFT-based demodulation [26] | 70 | 37 | 0.064 | 0.074 | 0.074 | 100 fps 50 ms 1% | 50 ±5 Hz |
| Frequency-tracking and fixed-filter [27] | 29.97 | NR | 0.07 | 0.07 | 0.07 | 50 fps 199 ms 1% | 50 ±5 Hz |
| Proposal | 15 | 15 | 1 | 1 | 1 | 120 fps 35 ms 1% | 60 +60, −23 Hz (steady-state test) and +40, −25 Hz (dynamic test) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razo-Hernandez, J.R.; Urbina-Salas, I.; Tapia-Tinoco, G.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Granados-Lieberman, D. Improved Performance of M-Class PMUs Based on a Magnitude Compensation Model for Wide Frequency Deviations. Mathematics 2020, 8, 1361. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081361
Razo-Hernandez JR, Urbina-Salas I, Tapia-Tinoco G, Amezquita-Sanchez JP, Valtierra-Rodriguez M, Granados-Lieberman D. Improved Performance of M-Class PMUs Based on a Magnitude Compensation Model for Wide Frequency Deviations. Mathematics. 2020; 8(8):1361. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081361
Chicago/Turabian StyleRazo-Hernandez, Jose Roberto, Ismael Urbina-Salas, Guillermo Tapia-Tinoco, Juan Pablo Amezquita-Sanchez, Martin Valtierra-Rodriguez, and David Granados-Lieberman. 2020. "Improved Performance of M-Class PMUs Based on a Magnitude Compensation Model for Wide Frequency Deviations" Mathematics 8, no. 8: 1361. https://0-doi-org.brum.beds.ac.uk/10.3390/math8081361