4.1. The Case of
In the first example, we examine the roles of
representing the inertia in the production process. Taking fixed values of
and
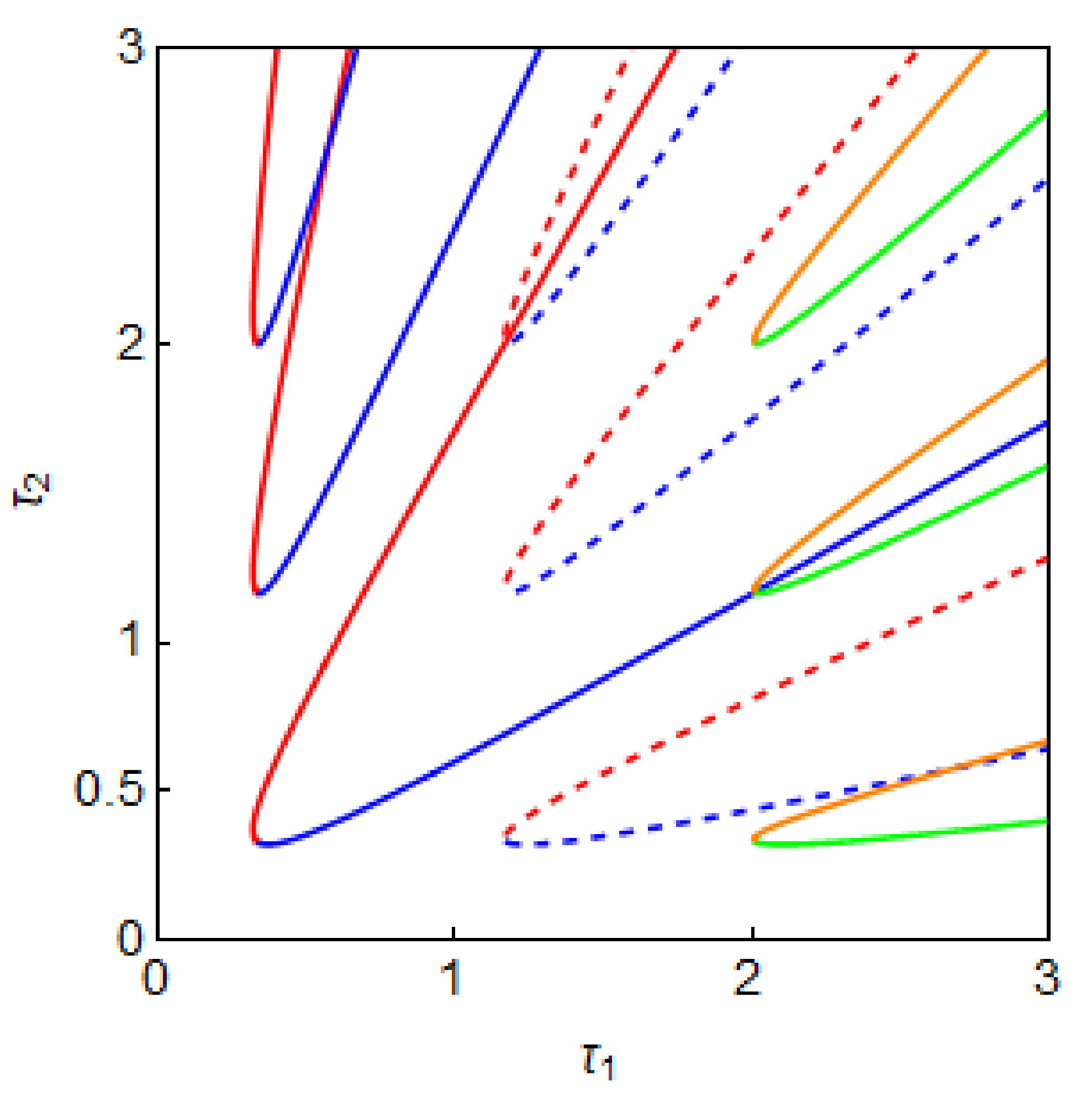
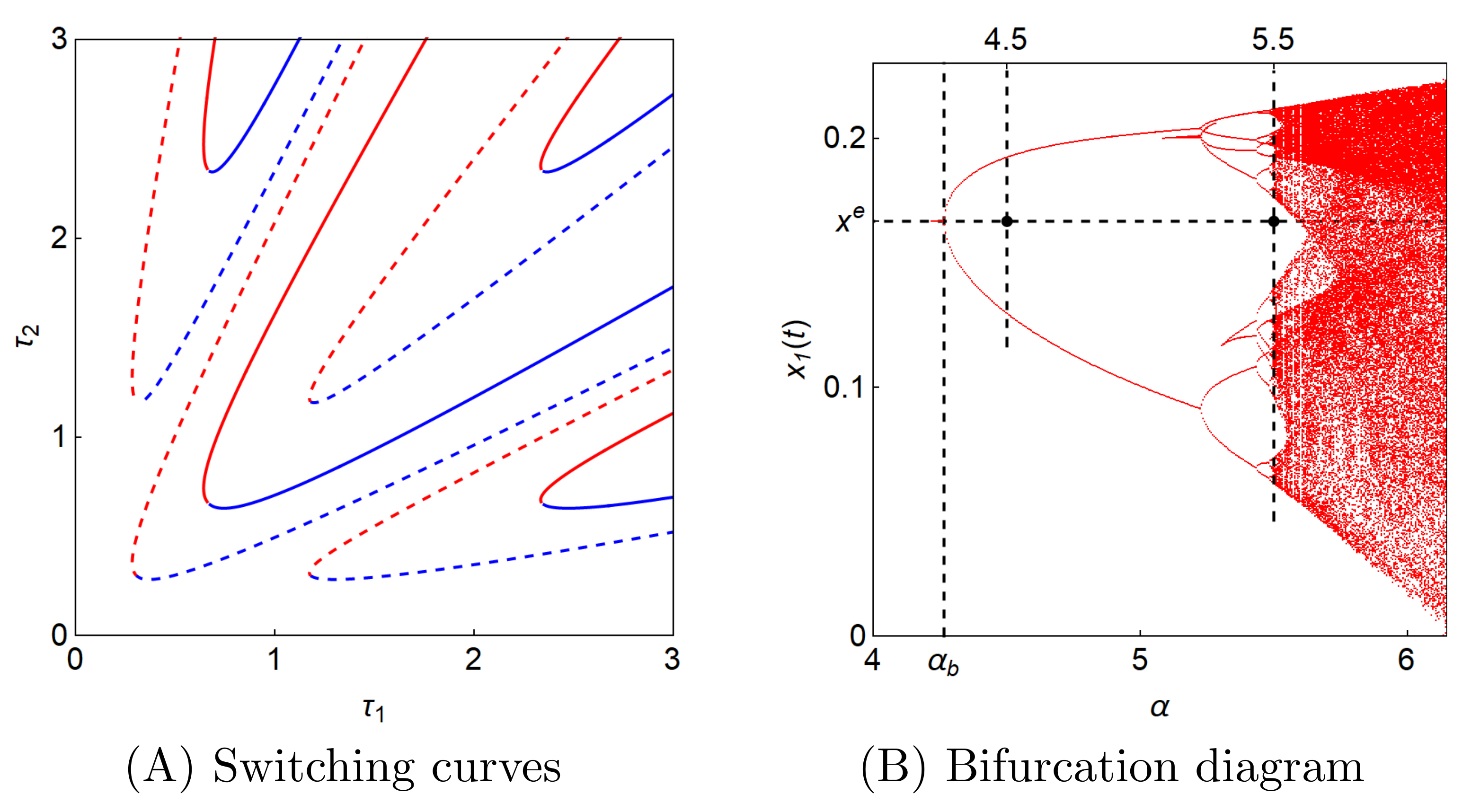
, we illustrate the solid switching curves with
and the dotted switching curve with
in
Figure 4A. The curve with
has the connecting point of the two branches in the lower part of the diagonal. The connecting point of the solid curve is
where
, and increasing
m shifts it rightward, increasing
n shifts it upward while the curve with
is located upper-right. It is observed that the dotted curves move further away from the origin than the solid curves, implying that increasing
enlarges the stability region. The dotted point
is located within the corn-shaped instability regions for
and
. However, as the value of
increases, the switching curves shift in the upper-right direction, and in consequence, the dotted point becomes located in the stable region for
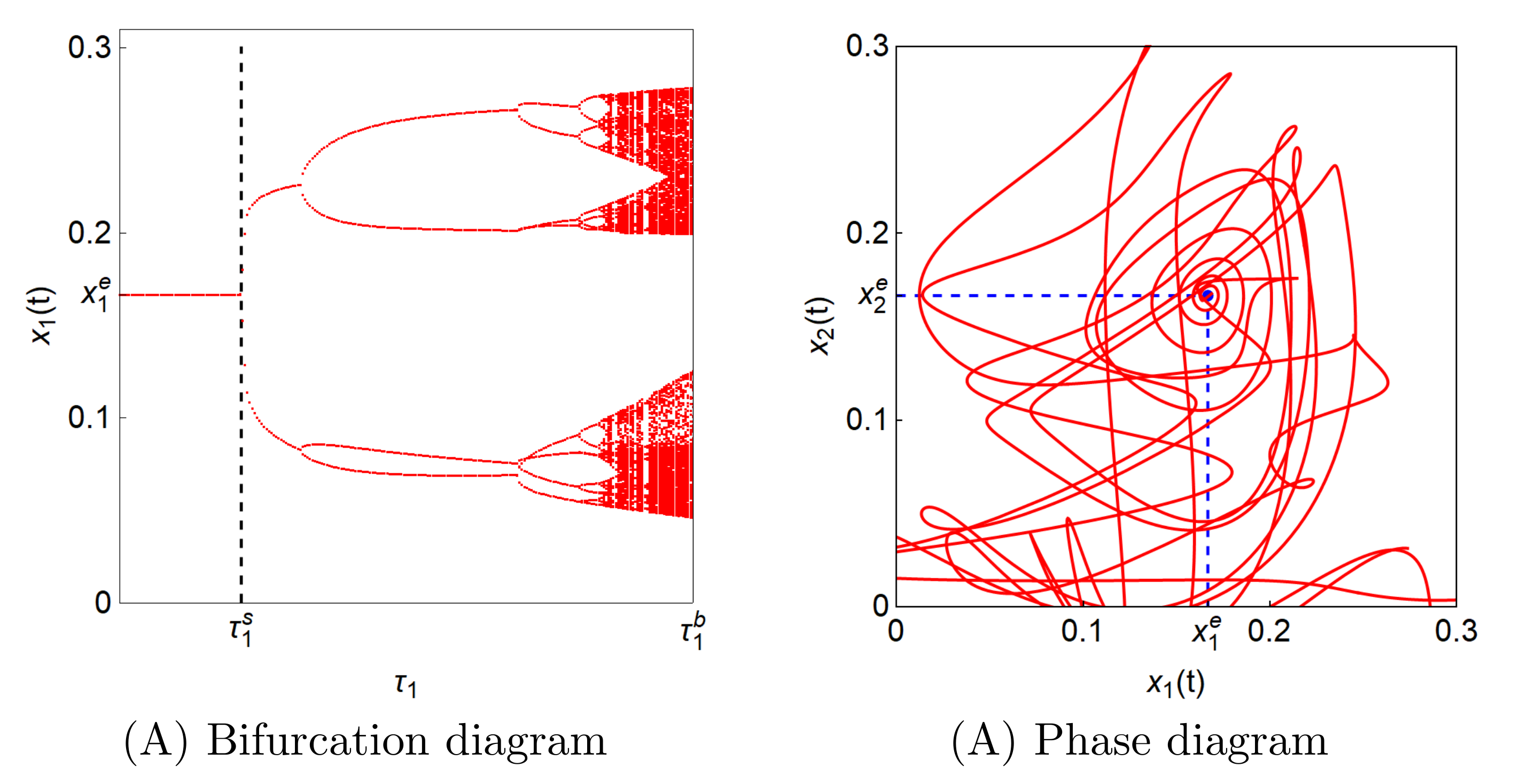
. This
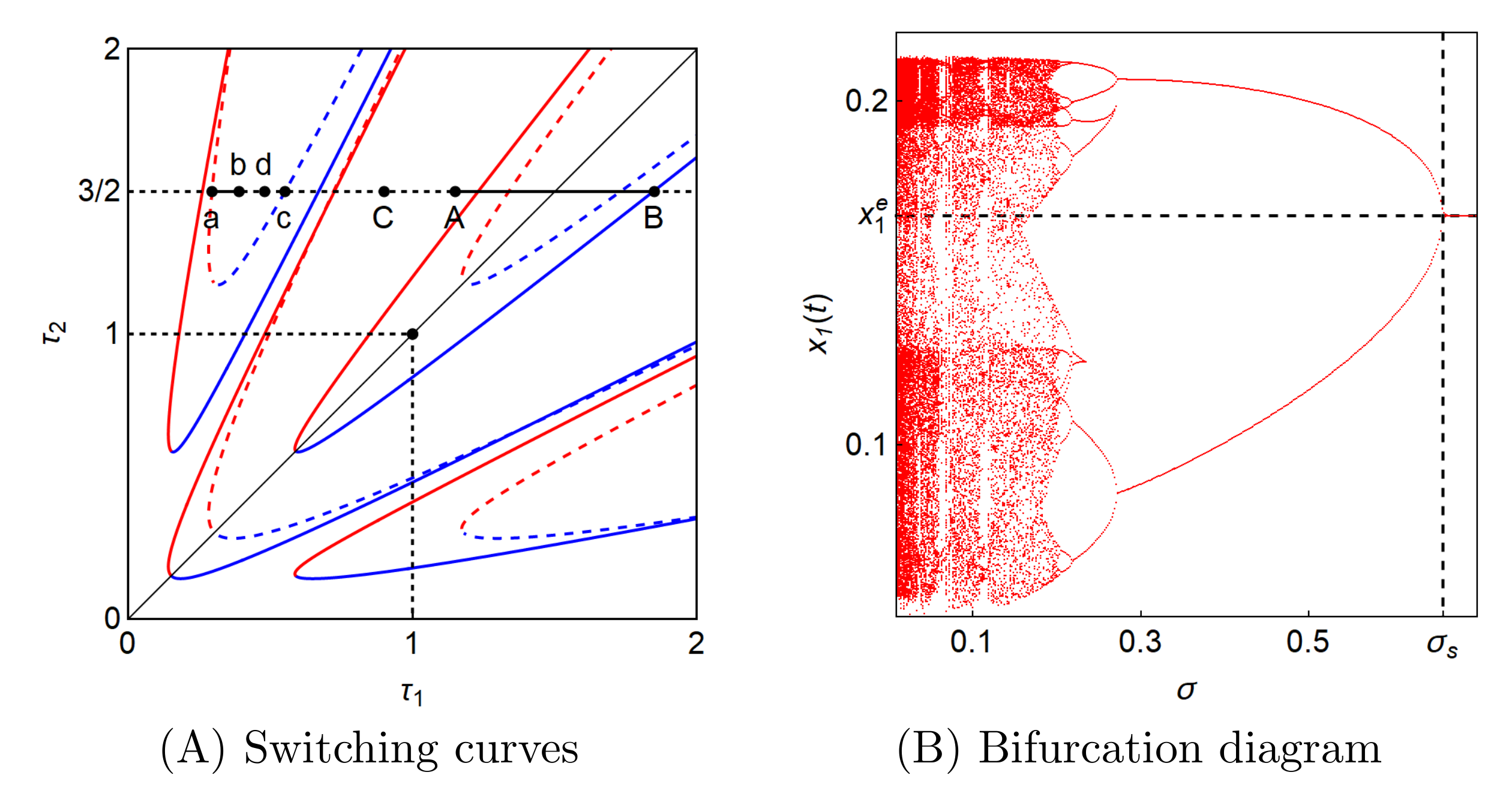
-stabilizing effect can be demonstrated more prominently in the bifurcation diagram for
in
Figure 4B. We choose
as a bifurcation parameter there and increase its value from
to
in steps of
. For each value of
, dynamic system (
2) is run for
under the parametric specification of
Discarding the data for we plot the local maxima and minima obtained from the remaining data vertically above the selected value of . Increasing the value of we repeat the same procedure until arrives at . The diagram shows that complex dynamics can arisefor smaller values of due to the fact that the dynamic structure with the Berezowski transformation is similar to that of the discrete-time system that exhibits complex dynamics. As increases, the complicated dynamics gradually disappear through a period-halving cascade. The fixed point is finally stabilized when the value of arrives at and increases. These results are summarized as follows:
Proposition 3. The inertia σ of dynamic system (2) has a twofold stabilizing effect in the sense that with increasing values, it enlarges the stability region and simplifies the complicated dynamics through a period-halving cascade. In the second example, we cfocus on the roles of
representing the relative speed of production adjustment. To explore this
-effect, we take
and plot the solid stability switching curves with
and the dotted switching curves with
in
Figure 5A. The relative locations of the curves depend on the values of
m and
n as in
Figure 4A. It shows that the dotted curves are closer to the origin than the solid curves. Hence, increasing the value of
shrinks the stability region. The bifurcation diagram for
is illustrated with
. It confirms the
-destabilizing effect in which the fixed point with
loses stability for
. It is also seen that a limit cycle appears for
, a cycle with many periods for
and erratic oscillations for larger values of
. These results are summarized as follows:
Proposition 4. The adjustment speed α has a twofold destabilizing effect in the sense that with increasing values, it contracts the stability region and complicates simple dynamics through a period-doubling cascade.
Next, we take a closer look at the global dynamic behavior for
and
. Therefore, we carry out more numerical simulations with the following parameters. For any other parameter specification, we might obtain the same qualitative results.
and the initial conditions,
We increase the value of
along the horizontal segment
in the upper-left corner in
Figure 4A. In this study, the firms are identical under Assumptions 1 and 3, and the resultant stability switching curves are symmetric for the diagonal. In consequence, varying
and fixing
and fixing
and varying
can generate the same results. Notice that the horizontal line at
crosses the upper-left corn-shaped dotted curve twice at
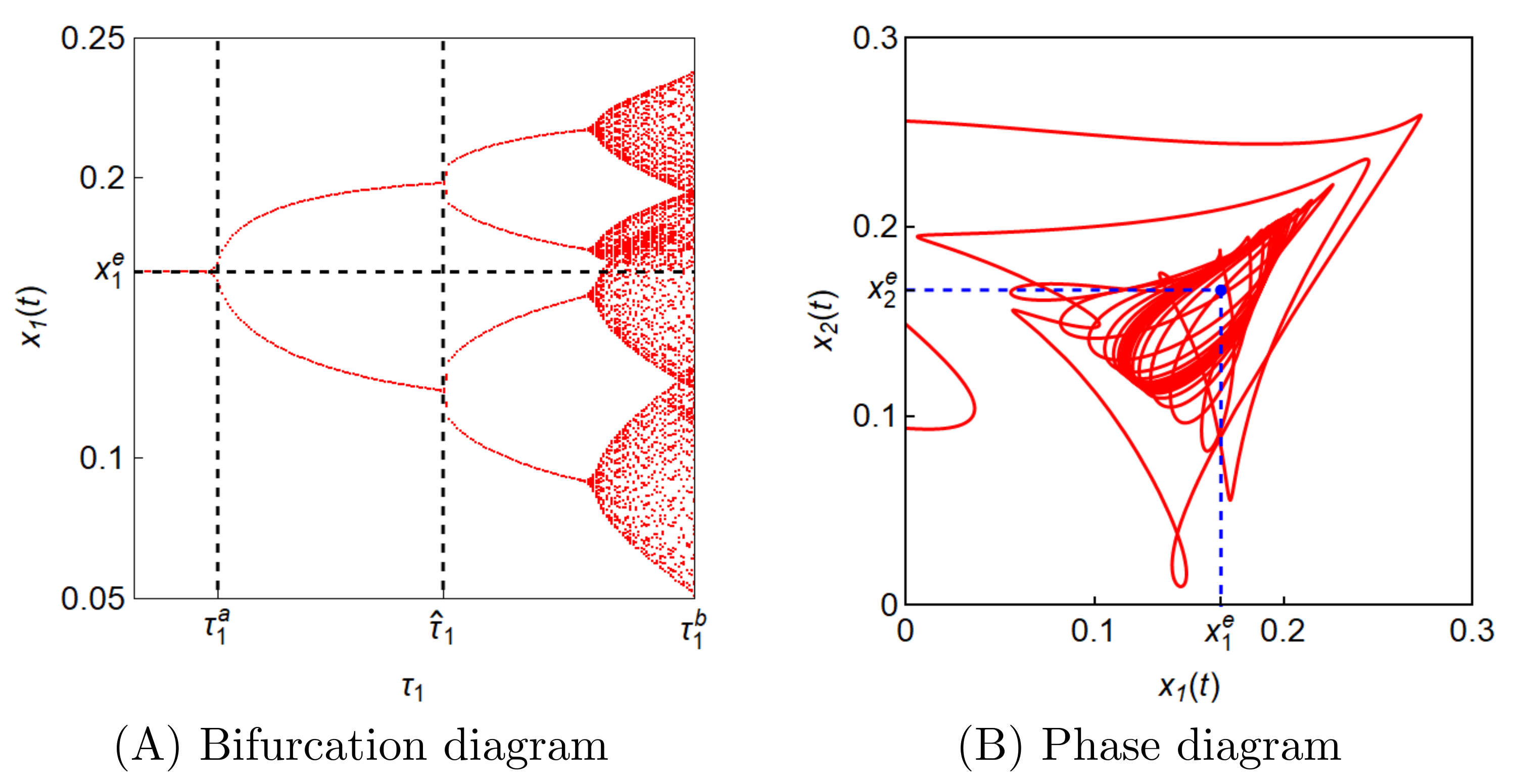
The first result is described by the bifurcation diagram in
Figure 6(A) in which
,
is a small number and
. For
there is a stable fixed point. We can see that an interesting phenomenon begins to happen when the value of
exceeds the critical value of
. For
the fixed point loses stability and is replaced with a limit cycle. As the value of
increases, the cyclic solution branches to form a doubly cyclic solution at the second bifurcation point near
. This value is a rough estimation. Further increasing
to
gives rise to a third bifurcation, after which much more complicated oscillations emerge. For
the dynamic system generates trajectories that might be negative, as is demonstrated in
Figure 6B. The model is not well-behaved and loses its economic meaning. However, for
just a little bit smaller than
a limit cycle is obtained again and then the fixed point regains stability for
Figure 6B shows the second result obtained for
that is between
and
It displays an expanding phase diagram in which
oscillates around the fixed point denoted by the blue dot for a while but gradually moves away from it, finally becomes negative for some values of
t.
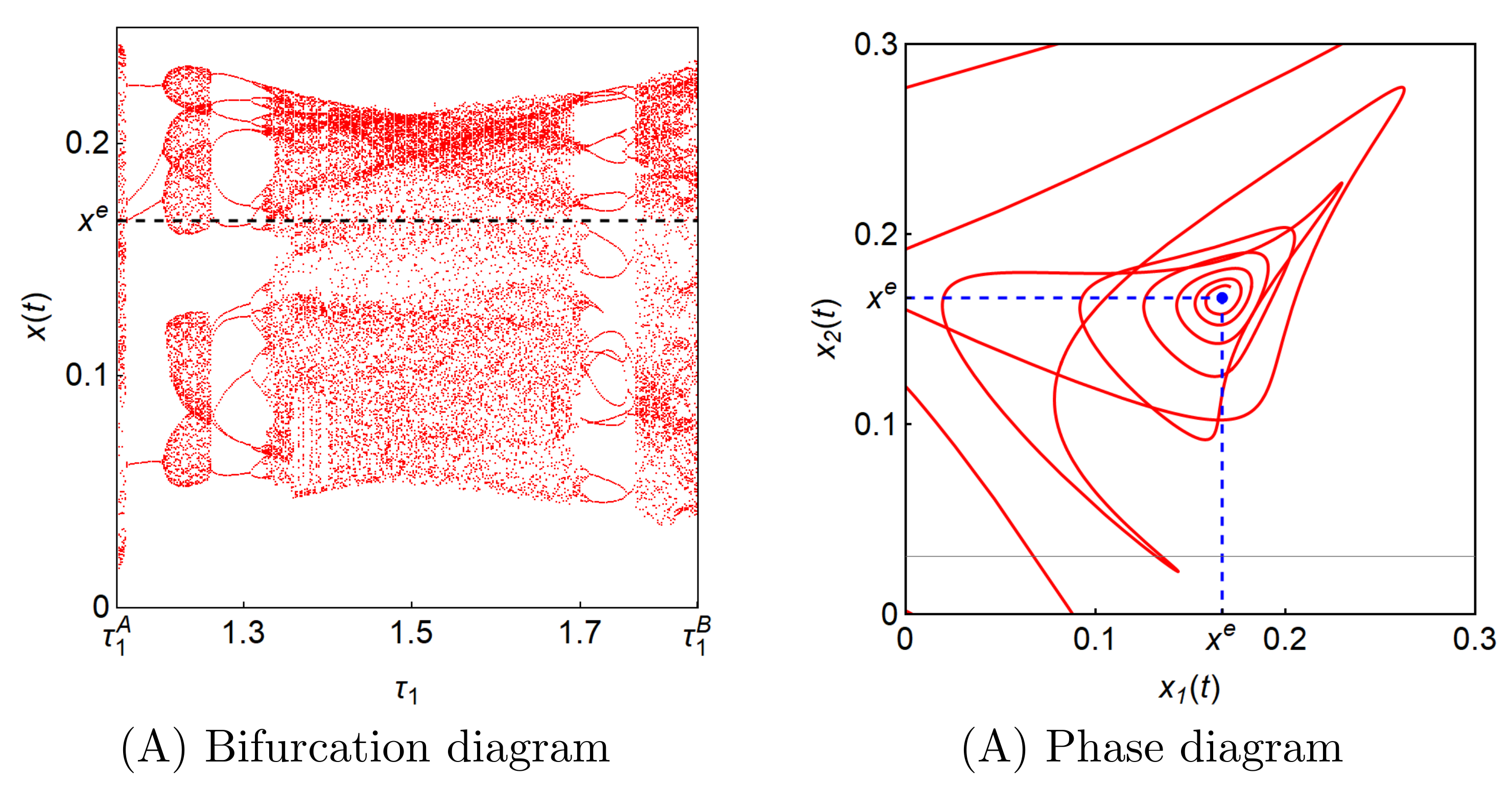
Under the same parameter set, we carry out the fourth example. Its result is illustrated in
Figure 4A when the value of
increases along the segment
The extreme values of
are
Notice that the segment
is located within the largest dotted corn-shaped stability switching curve. The fixed point is unstable for
. As compared to
Figure 6A, we present
Figure 7A in which the bifurcation diagram for
within this interval undergoes more complicated motions. The solution of the system bifurcates to erratic oscillations from regular oscillations and vice versa. A bit after
a regular cycle is clearly seen, which proceeds to spreading oscillations and then a regular cycle again with more periodicity appears as
increases. However, just raising
slightly from
or lowering it from
, we find unfavorable trajectories that sooner or later take negative values.
Figure 7B illustrates a phase portrait for
. The time trajectory oscillates around the fixed point for smaller values of
t but gets out of the nonnegative region for larger values. The numerical results obtained along the horizontal line at
are summarized as follows:
Proposition 5. For the fixed value of a solution of delay system exhibits various dynamics ranging from a limit cycle to an erratic oscillation as increases. Further, some solution could be negative and thus loses its economic meaning.
4.2. The Case Including
We now draw attention to the dynamic behavior under
for which
holds. From
for
in (
12),
Let
and
defined in (
8) is equal to
where
and
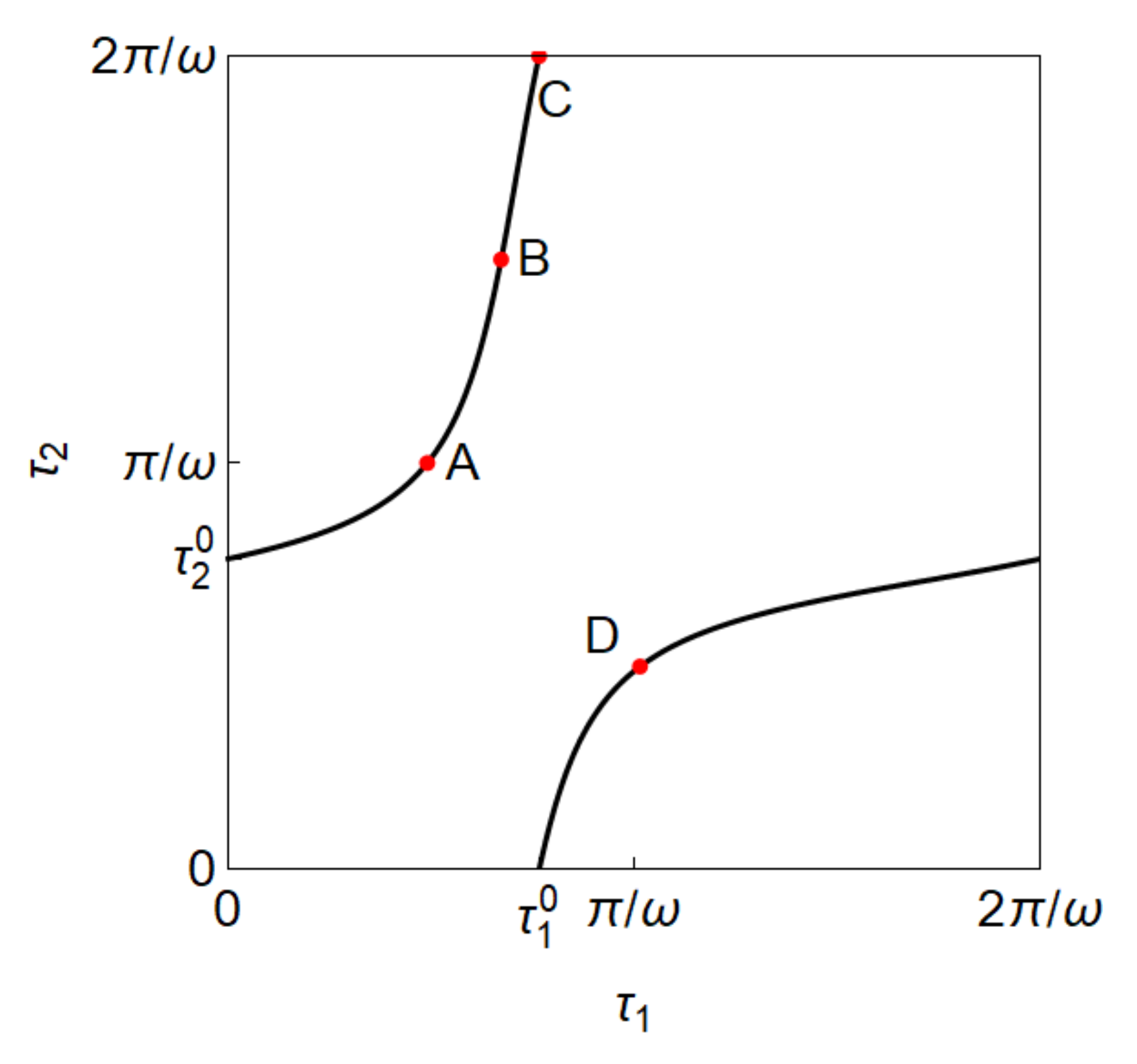
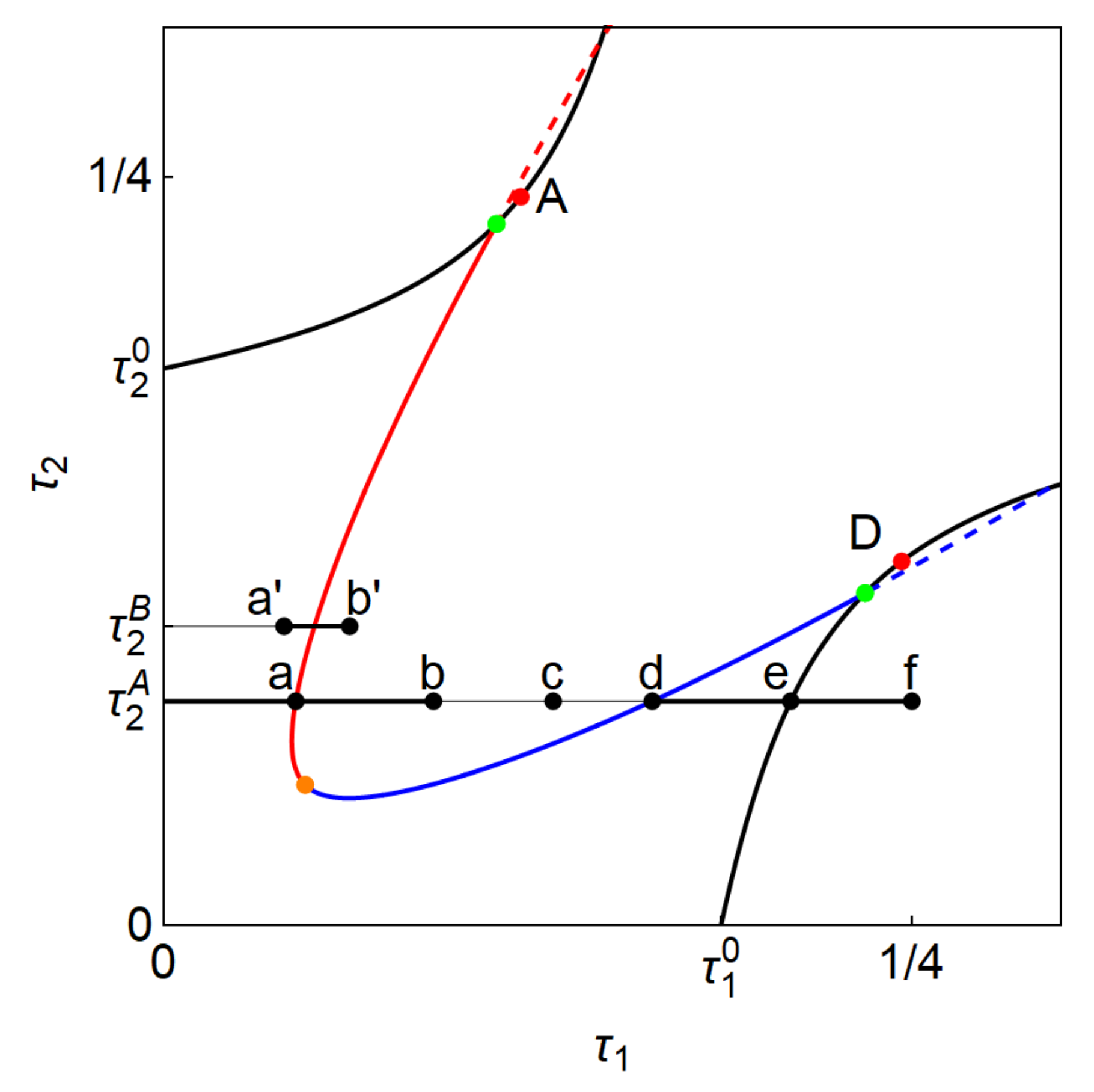
The black curves in
Figure 8 are the same as those in
Figure 3 in which
. Applying Theorem 3 with the newly specified values of the parameters, we obtain that the solid red-blue curve is loci of
whereasthe dotted red-blue curves as loci of
and
where
and
in (
13) and (
16) are re-defined as
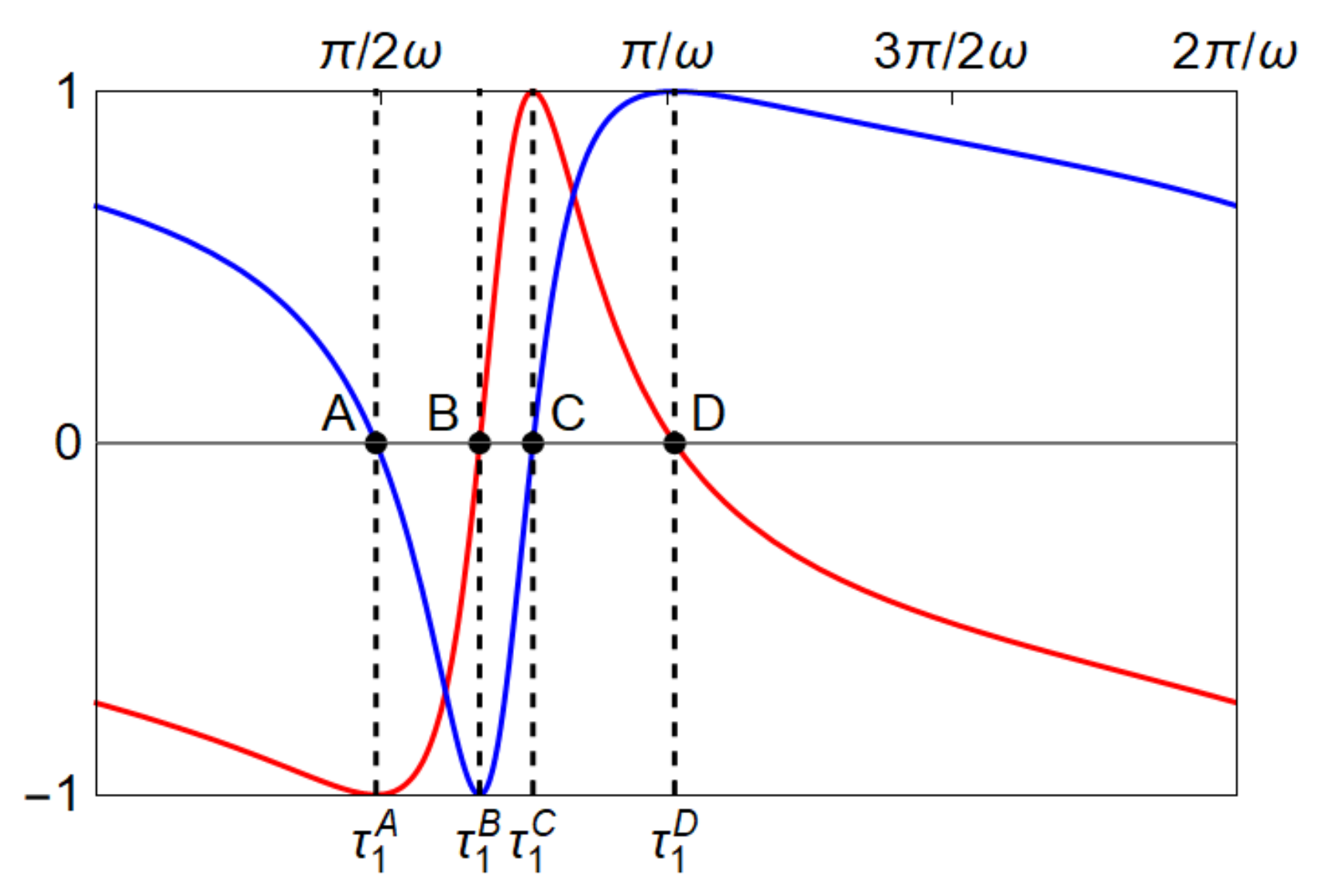
Notice that along the black curves, along the dotted curves and along the solid curves.
The stability region including the origin is surrounded by the upper black curve starting at
on the vertical axis, the solid red-blue segment and the lower black curve ending at
on the horizontal axis. Points
A and
D are those shown in
Figure 3. The orange point is the connecting point of the blue and red segments,
and the green points are on the black curves,
These green points are asymmetric with respect to the diagonal, the starting points of the solid curves and the end points of the dotted curves.
We present some numerical results to observe what dynamics system (
2) can generate. The red and blue segments correspond to the case of
and the case of
is shown by the two black segments. Let
and choose
as a bifurcation parameter. The horizontal line at
crosses the stability switching curve three times whose
-coordinates are
The fixed point is asymptotically stable for
loses its stability at
and undergoes a Hopf bifurcation. It regains stability at
and then loses stability again at
. Although it is known that the fixed point is unstable for
and
it is not known what kind of dynamics could emerge. For this reason, we perform simulations, focusing on the unstable intervals.
Figure 9A describes possible dynamics for
with
and
p is a small number. The Hopf value is
A cyclic solution occurs for
and its amplitude gets larger as
becomes larger. The second bifurcation takes place around
(This value is also a rough estimation.)and periodicity of the cycle is doubled.
Figure 9B is a bifurcation diagram for
with
A Hopf bifurcation occurs at
and the stable fixed point for
bifurcates to a limit cycle for
Two more examples are given to explore the occurrence of stability switching. We change only the value of
from
to
keeping other parameter values fixed as given.
Figure 10A shows that delay system (
2) undergoes a period-doubling bifurcation for
with
and
along the horizontal curve at
The solution can exchange its form (stable point, limit cycle, period-doubling and chaos) for different values of
Comparing
Figure 10A with
Figure 9A indicates that system (
2) apparently generates more complicated dynamics involving the transition from order to chaos when
is increased. The next example in
Figure 10B is a phase diagram at point
c with
between points
b and
c in
Figure 8. It indicates that system (
2) possesses exploded dynamics for bifurcation parameter
in the range of
A trajectory starting in the neighborhood of the fixed point oscillatory moves away, repeat erratic ups and downs several times and then crosses the horizontal or vertical axis. Crossing the axis means that such a trajectory takes a negative value and loses its economic meaning. Similar exploded results are obtained for the different values of
and
.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









