The analysis of the dynamics of a method is becoming one of the most investigated parts within the study of iterative methods since it allows for classifying the different iterative schemes, not only from the point of view of their speed of convergence, but also analyzing its behavior based on the initial estimate taken (see, for example, [
6,
7,
8,
9,
10,
11,
12,
13]). This study allows for visualizing graphically the set of initial approximations that converge to a given root or to points that are not roots of the equation. In addition, it provides important information about the stability and reliability of the iterative method.
In this paper, we focus on studying the complex dynamic of the parametric family (
2) on quadratic polynomials of the form
, where
. For this study, we need to present the result called the Scaling Theorem, since it allows us to conjugate the dynamical behavior of one operator with the behavior associated with another, conjugated through an affine application, that is, our operator has the same stability on all quadratic polynomials. This result will be of great use to us since we can apply the Möbius transformation on the operator
associated with our parametric family acting on
, assuming that the conclusions obtained will be of general application for any quadratic polynomial used.
Now, we can apply the Möbius transformation on the operator associated with the parametric family (
2) in order to obtain an operator that does not depend on the constants
a and
b and, thus, be able to study the dynamical behavior of this family for any quadratic polynomial. The Möbius transformation, in this case, is
and has the following properties:
3.1. Fixed Points
The orbit of a point
is defined (see, for example, [
14,
15]) as the set of the successive applications of the rational operator, i.e.,
The performance of the orbit of z is deduced attending to its asymptotic behavior. A point is said to be T-periodic if and , for . For , this point is a fixed point.
Therefore, a fixed point is one that is kept invariant by the operator , that is, it is one that satisfies the equation . All the roots of the quadratic polynomial are, of course, fixed points of the operator. However, it may happen that fixed points appear that do not correspond to any root; we call these points strange fixed points. These points are not desirable from a numerical point of view because when an initial estimate is taken that is in the neighborhood of a strange fixed point, there is a possibility that the numerical method will converge to it, that is, to a point that is not a solution of the equation. Strange fixed points often appear when iterative methods are analyzed and their presence can show the instability of the method.
Fixed points can be classified according to the behavior of the derivative operator on them; thus, a fixed point can be:
Repulsor, if ;
Parabolic, if ;
Attracting, if ;
Superattracting, if .
Moreover, the basin of attraction of an attracting fixed point is the set of initial guesses whose orbits tend to . Therefore, the set of points whose orbit tends to an attracting fixed point defines the Fatou set , while its complement is the Julia set .
In what follows, we study what are the fixed points of operator and their character depending on the value of parameter . The proof of the following result is straightforward, as it only needs to solve the equation .
Proposition 1. By analyzing the equation , one obtains the following statements:
- (i)
and are superattracting fixed points for each value of γ.
- (ii)
is a strange fixed point when .
- (iii)
the roots of polynomialwhich we denote by , where , are also strange fixed points for each value of γ.
We need the expression of the differentiated operator to analyze the stability of the fixed points and to obtain the critical points:
It is clear that 0 and ∞ are always superattracting fixed points because they come from the roots of the polynomial, and the order of the iterative methods is higher than 2, but the stability of the other fixed points can change depending on the values of parameter .
Proposition 2. The character of the strange fixed point is as follows:
- (a)
If , then is not a strange fixed point.
- (b)
If or , then is an attracting point.
- (c)
If and , then is an attracting point.
- (d)
cannot be a superattracting point.
- (e)
If and , then is a parabolic point.
- (f)
In another case, is the repulsor.
Proof. It is not difficult to check that cannot be 0, so cannot be a superattractor, and, when , is not a fixed point.
Now, we are going to study when
is an attracting point. It is easy to check that
is equivalent to
. Rewriting the last expression, we obtain the following inequality:
Let us see when this inequality is verified. When , that is, , is an attracting point, so we obtain that is an attracting point when or . When we have , we need to satisfy for being a superattractor.
We are going to study when is a parabolic point. will be a parabolic point when , that is, is a parabolic point when and . □
Now, we establish the stability of the strange fixed points that are roots of the polynomial (
24). To do this, we calculate these roots noting that this polynomial is a sixth degree symmetric polynomial, that is, it is a polynomial that can be reduced to a third degree one, and that satisfies the following properties:
Performing the reduction of (
24), we obtain:
where
,
and
. Now, we calculate the roots of this polynomial and obtain:
To calculate the roots of polynomial (
24) from the
,
, we undo the variable change since
. Therefore, we obtain the roots of the sixth degree polynomial, which are conjugated two by two
Now, we study when the roots of the polynomial (
24) are superattractors. For them, we solve
for all
, and we get the following relevant values of
:
,
,
,
.
Next, we are going to study the character of the fixed points by analyzing those values of
close to the values of the parameter for which some
is a supertractor. To do this, we study how
behaves near the four previous values, and we obtain regions where some of the roots will be attractors. These regions are represented in
Figure 1.
3.2. Critical Points
The relevance of knowing that the free critical points (that is, critical points different from the roots of the polynomial) is based on this known fact: each invariant Fatou component contains, at least, one critical point. Operator
has as critical points
,
,
, and the roots of the polynomial
which we denote by
, where
.
Let us remark that
is a preimage of the fixed point
. We can see that
is a symmetric polynomial, so we can obtain the roots of
obtaining roots of a polynomial of degree 3. The polynomial reduced of
is the following one that we obtain analogously to the polynomial (
24):
In order to calculate the roots z of , we need to obtain the roots of and apply the following expression to them . Thus, the roots of are conjugated.
Now, we are going to study the asymptotic behavior of the critical points to establish if there are different convergence basins than those generated by the roots. For the free critical point , we have , who is a strange fixed point, so the parameter plane associated with this critical point is not significative, since we know the stability of .
The other free critical points are roots of a polynomial that depends on ; for that, we draw the parameter planes. As we have that the roots are conjugated, we will only draw three planes. We use as an initial estimate a free critical point that depends on . We establish a mesh in the complex plane of points. Each point of the mesh corresponds to a parameter value. In each of them, the rational function is iterated to obtain the orbit of the critical point as a function of . If that orbit converges to or to in less than 40 iterations, that point of the mesh is painted red; otherwise, the point appears in black.
As we can see, there are many values of the parameter
that would result in a method in which the free critical points converge to one of the two roots. As it is observed in
Figure 2, they are located in the red area on the right side of the plane. Moreover, some black areas can be identified as the regions of stability of those fixed points that can be attracting, such as
Figure 1b, whose stability region appears in black on the right side of
Figure 2c.
Now, we select some stable (in red in parameter planes) and unstable values of (in black) in order to show their performance.
In the case of dynamical planes, the value of the parameter
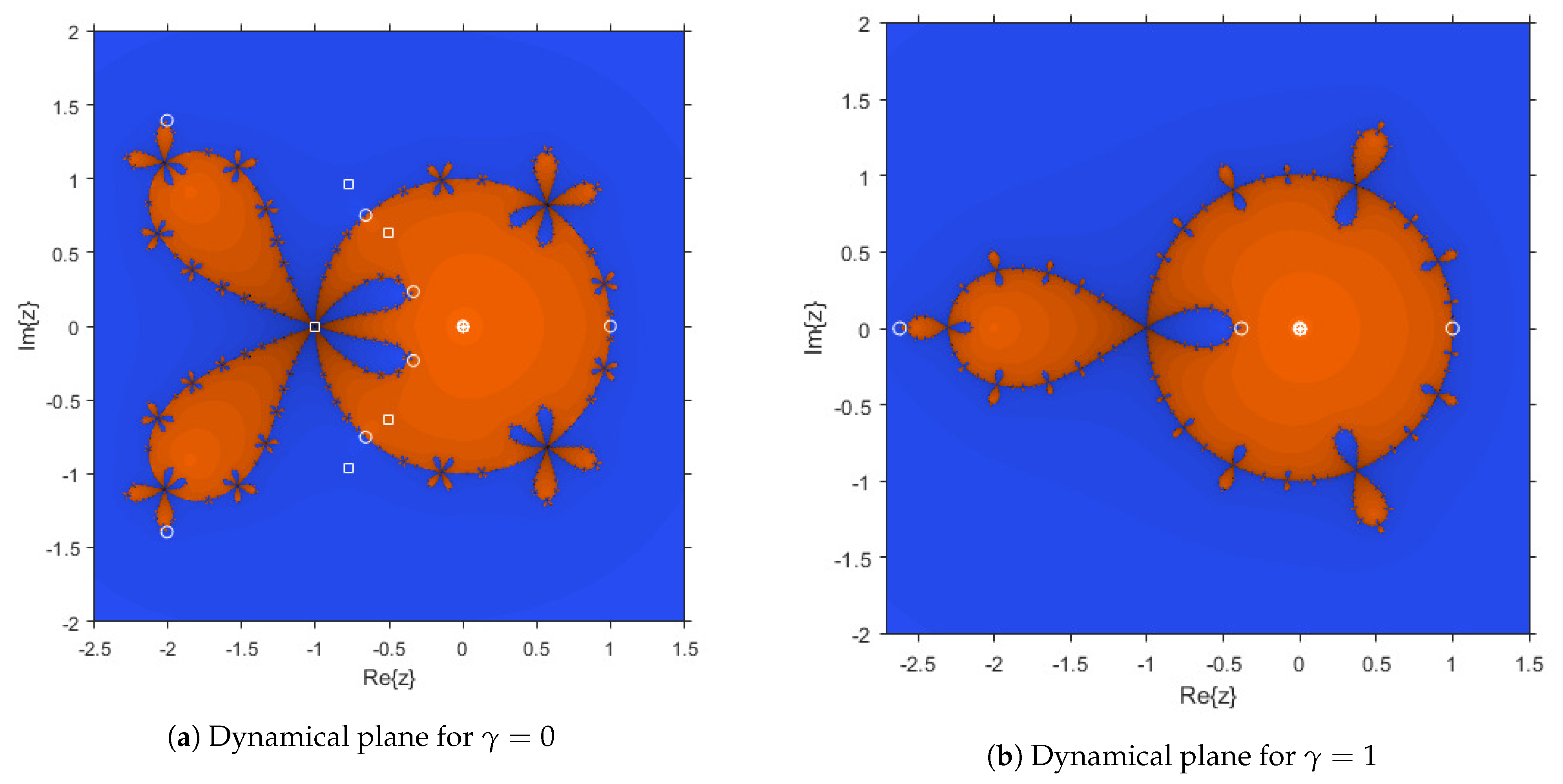
is fixed. Each point in the complex plane is considered as a starting point of the iterative scheme, and it is painted in different colors depending on the point that it has converged to. In this case, we paint in blue points what converged to
∞, and in orange points what converged to 0. These dynamical planes have been generated with a mesh of
points and a maximum of 40 iterations per point. We mark strange fixed points with white circles, the fixed point z = 0 with a white star, and free critical points with white squares (again, the routines used appear in [
6]).
One value of the parameter that would be an interesting value is
because it is the only one that obtains order 4. In that case, we obtain the dynamical plane that we can see in
Figure 3a. In this case, two free critical points are in each basin of attraction, and the strange fixed points are in the boundary of both basins of attraction, so they are repulsive. In that case, the method is stable, and, as we can see, almost every point converges to 0 or
∞ (Let us notice that, in practice, any initial estimation taken in the Julia set will converge to 0 or to
∞, due to the rounding error).
Other value for the parameter that we study is
,
Figure 3b. As we can see, this dynamical plane is similar to that of
, but, in this case, we obtain less free critical points and less strange fixed points, due to the simplification of the rational function for this value of
.
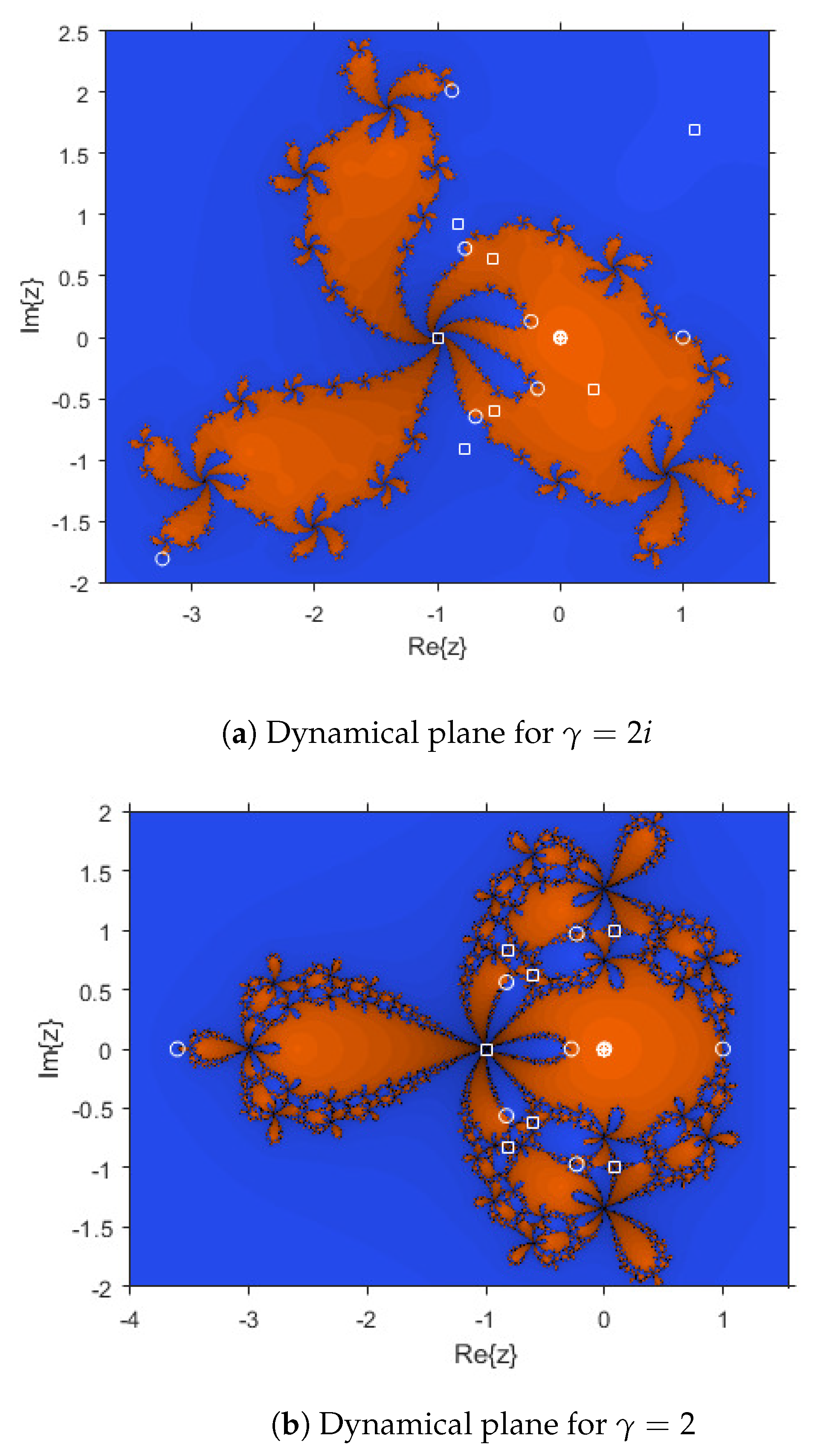
Carrying out numerous experiments, we have realized that the simplest dynamics is that of the methods with parameter
and
. Next, we will see other dynamical planes associated with other values of the parameter
. Some of these planes do not have a bad dynamics, although it is not as simple as the previous ones. This is the case of
,
Figure 4b, or the case of
,
Figure 4a.
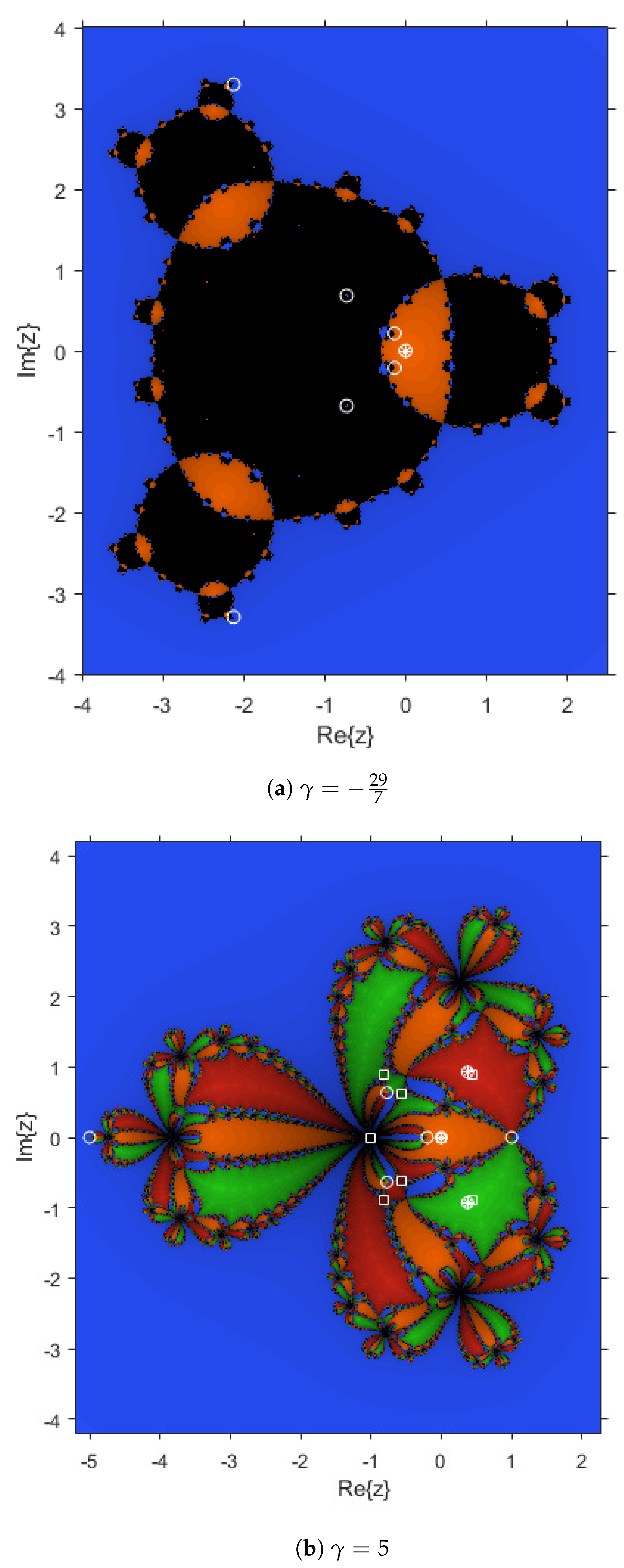
However, values such as
,
or
present a dynamical plane with the same number of basins of attraction but with more complicated performance. We can see some of these dynamical planes in
Figure 5a,b and
Figure 6a. There are also parameter values for which the number of basins of attraction increases, for example,
(
Figure 6b). These cases should be avoided since our method may not converge to the roots and may end up converging to other points.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}