
On the Convergence of a New Family of Multi-Point Ehrlich-Type Iterative Methods for Polynomial Zeros



Faculty of Mathematics and Informatics, University of Plovdiv Paisii Hilendarski, 24 Tzar Asen, 4000 Plovdiv, Bulgaria
*
Author to whom correspondence should be addressed.
Mathematics 2021, 9(14), 1640; https://0-doi-org.brum.beds.ac.uk/10.3390/math9141640
Submission received: 17 June 2021
/
Revised: 6 July 2021
/
Accepted: 8 July 2021
/
Published: 12 July 2021
(This article belongs to the Special Issue Numerical Methods for Solving Nonlinear Equations)
Abstract
:In this paper, we construct and study a new family of multi-point Ehrlich-type iterative methods for approximating all the zeros of a uni-variate polynomial simultaneously. The first member of this family is the two-point Ehrlich-type iterative method introduced and studied by Trićković and Petković in 1999. The main purpose of the paper is to provide local and semilocal convergence analysis of the multi-point Ehrlich-type methods. Our local convergence theorem is obtained by an approach that was introduced by the authors in 2020. Two numerical examples are presented to show the applicability of our semilocal convergence theorem.
Keywords:
multi-point iterative methods; iteration functions; polynomial zeros; local convergence; error estimates; semilocal convergenceMSC:
65H041. Introduction
This work deals with multi-point iterative methods for approximating all the zeros of a polynomial simultaneously. Let us recall that an iterative method for solving a nonlinear equation is called a multi-point method if it can be defined by an iteration of the form
where N is a fixed natural number, and are initial approximations. In the literature, there are multi-point iterative methods for finding a single zero of a nonlinear equation (see, e.g., [1,2,3,4,5,6,7]). This study is devoted to the multi-point iterative methods for approximating all the zeros of a polynomial simultaneously (see, e.g., [8,9,10,11]).
Let us recall the two most popular iterative methods for simultaneous computation of all the zeros of a polynomial f of degree . These are Weierstrass’ method [12] and Ehrlich’s method [13].
Weierstrass’ method is defined by the following iteration:
where the function is defined by with
where is the leading coefficient of f and denotes the set of all vectors in with pairwise distinct components. Weierstrass’ method (1) has second order of convergence (provided that f has only simple zeros).
Ehrlich’s method is defined by the following fixed point iteration:
where the iteration function is defined by with
Ehrlich’s method has third order convergence. In 1973, this method was rediscovered by Aberth [14]. In 1970, Börsch-Supan [15] constructed another third-order method for simultaneous computing all the zeros of a polynomial. However in 1982, Werner [16] proved that both Ehrlich’s and Börsch-Supan’s methods are identical.
In 1999, Trićković and Petković [9] constructed and studied a two-point version of Ehrlich’s method. They proved that the two-point Ehrlich-type method has the order of convergence .
In the present paper, we introduce an infinite sequence of multi-point Ehrlich-type iterative methods. We note that the first member of this family of iterative methods is the two-point Ehrlich-type method constructed in [9]. The main purpose of this paper is to provide a local and semilocal convergence analysis of the multi-point Ehrlich-type methods.
Our local convergence result (Theorem 2) contains the following information: convergence domain; a priori and a posteriori error estimates; convergence order of every method of the family. For instance, we prove that for a given natural number N, the order of convergence of the Nth multi-point Ehrlich-type method is , where r is the unique positive solution of the equation
It follows from this result that the first iterative method has the order of convergence which coincides with the above mentioned result of Trićković and Petković. We note that each method of the new family has super-quadratic convergence of order . The semilocal convergence result (Theorem 4) states a computer-verifiable initial condition that guarantees fast convergence of the corresponding method of the family.
The paper is structured as follows: In Section 2, we introduce the new family of multi-point iterative methods. Section 3 contains some auxiliary results that underlie the proofs of the main results. In Section 3, we present a local convergence result (Theorem 2) for the iterative methods of the new family. This result contains initial conditions as well as a priori and a posteriori error estimates. In Section 5, we provide a semilocal convergence result (Theorem 4) with computer verifiable initial conditions. Section 6 provides two numerical examples to show the applicability of our semilocal convergence theorem and the convergence behavior of the proposed multi-point iterative methods. The paper ends with a conclusion section.
2. A New Family of Multi-Point Ehrlich-Type Iterative Methods
Throughout the paper stands for a valued field with a nontrivial absolute value and denotes the ring of uni-variate polynomials over . The vector space is equipped with the product topology.
For a given vector , always denotes the ith component of u. For example, if F is a map with values in , then denotes the ith component of the vector . Let us define a binary relation on as follows [17]
Here and throughout the paper, is defined by
Suppose is a polynomial of degree . A vector is called a root vector of the polynomial f if
where . It is obvious that f possesses a root vector in if and only if it splits over .
In the following definition, we introduce a real-value function of two vector variables that plays an essential role in the present study.
Definition 1.
Suppose is a polynomial of degree . We define an iteration function of two vector variables as follows:
where is defined by
Now the two-point Ehrlich-type root-finding method introduced by Trićković and Petković [9] can be defined by the following iteration
with initial approximations .
Theorem 1
Based on the function , we define a sequence of vector-valued functions such that the Nth function is a function of vector variables.
Definition 2.
We define a sequence of iteration functions
recursively by setting and
The sequence of domains is defined also recursively by setting and
Clearly, the iteration function coincides with the function .
Definition 3.
Let N be a given natural number, and be initial approximations. We define the Nth iterative method of an infinite sequence of multi-point Ehrlich-type methods by the following iteration
Note that in the case , the iterative method (11) coincides with the two-point Ehrlich-type method (8).
3. Preliminaries
In this section, we present two basic properties of the iteration function defined in Definition 1, which play an important role in obtaining the main result in Section 4.
In what follows, we assume that is endowed with the norm defined by
and with the cone norm defined by
assuming that is endowed with the component-wise ordering ⪯ defined by
Furthermore, for two vectors and , we denote by the vector
We define a function by with
Lemma 1
([11]). Suppose and ξ is a vector with pairwise distinct components.
where the function is defined by
Lemma 2.
Suppose is a polynomial of degree , which splits over , and is a root vector of f. Let be two vectors such that . If for some , then
where is defined by
Proof.
Lemma 3.
Let be a polynomial of degree with n simple zeros in , and let be a root vector of f. Suppose are two vectors such that . Then:
- (i)
- ;
- (ii)
- ;
- (iii)
- ,
Proof. (i) According to (17), we have . Then it follows from Lemma 1 that
for every . This yields . In view of (7), it remains to prove that
for . Let be fixed. We shall consider only the non-trivial case . In this case, (19) is equivalent to
On the other hand, it follows from Lemma 2 that (20) is equivalent to , where is defined by (15). By Lemma 1 with , we obtain
for every . From (15), (18) and (21), we obtain
This implies that which proves the first claim.
(ii) The second claim is equivalent to
for all . If , then (23) holds trivially. Let . Then, it follows from (21) that . It follows from (6), (20) and (14) that
Therefore, (23) holds, which proves the second claim.
(iii) By dividing both sides of the last inequality by and taking the max-norm, we obtain the third claim. □
Lemma 4.
Let be a polynomial of degree with n simple zeros in , and let be a root vector of f. Suppose are two vectors satisfying
- (i)
- ;
- (ii)
- ;
- (iii)
- .
4. Local Convergence Analysis
In this section, we present a local convergence theorem for the multi-point iterative methods (11). More precisely, we study the local convergence of the multi-point Ehrlich-type methods (11) with respect to the function of the initial conditions defined by (13), where is a root vector of a polynomial .
Definition 4.
and is defined by (10).
Lemma 5.
Let be a polynomial of degree with n simple zeros in and be a root vector of f. Assume and . Then:
- (i)
- ;
- (ii)
- ;
- (iii)
- ,
Proof.
Applying Lemma 1 with , we obtain (i). It follows from Definition 2, Lemma 3 (ii) and Definition 4 that
which proves (ii). From Definition 2, Lemma 3 (iii) and Definition 4, we obtain
which proves (iii). □
Lemma 6.
Let be a polynomial of degree with n simple zeros in , and let be a root vector of f. Assume and are vectors in such that
- (i)
- ;
- (ii)
- ;
- (iii)
- .
Proof.
The proof goes by induction on N. In the case , Lemma 6 coincides with Lemma 4. Suppose that for some the three claims of the lemma hold for every vectors satisfying (30). Let be vectors satisfying
We must prove the following three claims:
By induction assumption, we obtain . By induction assumption (ii) and (30), we obtain
By induction assumption, we also have
Now we are ready to state the first main result in this paper.
Theorem 2.
Suppose is a polynomial of degree which has n simple zeros in , is a root vector of f, and . Let be initial approximations such that
where the function is defined by (13). Then the multi-point Ehrlich-type iteration (11) is well defined and converges to ξ with order r and error estimates
where is the unique positive root of the Equation (5), and λ is defined by
Proof.
First, we will show that the iterative sequence generated by (11) is well defined and the inequality
holds for every integer . The proof is by induction. It follows from (39) that (40) holds for . Suppose that for some the iterates are well defined and
We shall prove that the iterate is well defined and that it satisfies the inequality (40) with . It follows from (39) that . Hence, from (41) we obtain
5. Semilocal Convergence Analysis
In this section, we present a semilocal convergence result for the multi-point Ehrlich type methods (11) with respect to the function of initial conditions defined by
where the function is defined by (2). We note that in the last decade, this is the most frequently used function to set the initial approximations of semilocal results for simultaneous methods for polynomial zeros. (see, e.g., [10,11,17,18,19,20,21,22]).
The new result is obtained as a consequence from the local convergence Theorem 2 by using the following transformation theorem:
Theorem 3
(Proinov [19]). Let be an algebraically closed field, be a polynomial of degree , and let be a vector with pairwise distinct components such that
where . Then f has only simple zeros in and there exists a root vector of f such that
Each iterative method for finding simultaneously all roots of a polynomial of degree is an iterative method in . It searches the roots of the polynomial f as a vector . We have noticed in Section 2 that such a vector is called a root vector of f. Clearly, a polynomial can have more than one vector of the roots. On the other hand, we can assume that the vector root is unique up to permutation.
A natural question arises regarding how to measure the distance of an approximation to the zeros of a polynomial. The first step is to identify all vectors whose components are the same up to permutation. Namely, we define a relation of equivalence ≡ on by if the components of x and y are the same up to permutation. Then following [11,20], we define a distance between two vectors as follows
Note that is a metric on the set of classes of equivalence. For simplicity, we shall identify equivalence classes with their representatives.
In what follows, we consider the convergence in with respect to the metric . Clearly, if a sequence in is convergent to a vector with respect to the norm , then it converges to x with respect to the metric . The opposite statement is not true (see [11]).
Before formulating the main result, we recall a technical lemma.
Lemma 7
Now we can formulate and prove the second main result of this paper.
Theorem 4.
Suppose is an algebraically closed field, is a polynomial of degree and . Let be initial approximations satisfying the following condition:
where the function is defined by (42). Then the polynomial f has only simple zeros and the multi-point Ehrlich-type iteration (11) is well defined and converges (with respect to the metric ρ) to a root vector ξ of f with order of convergence , where r is the unique positive solution of the Equation (5).
Proof.
The condition (47) can be represented in the form
where R is defined in (36). From Theorem 3 and the inequality (48), we conclude that f has n simple zeros in and that there exist root vectors such that
Let us put . Since are root vectors of f, then for all . It follows from Lemma 7 that there exist vectors such that and (49) can be represented in the form
The following criterion guarantees the convergence of the methods (11). It is an immediate consequence of Theorem 4.
Corollary 1
(Convergence criterion). If there exists an integer such that
then f has only simple zeros and the multi-point Ehrlich-type iteration (11) converges to a root vector ξ of f.
The next result is an immediate consequence of Theorem 5.1 of [19]. It can be used as a stopping criterion of a large class of iterative methods for approximating all zeros of a polynomial simultaneously.
Theorem 5
(Proinov [19]). Suppose is an algebraically closed field, is a polynomial of degree with simple zeros, and is a sequence in consisting of vectors with pairwise distinct components. If is such that
then the following a posteriori error estimate holds:
where the metric ρ is defined by (45), the function is defined by (42), and the function α is defined by
6. Numerical Examples
In this section, we present two numerical examples in order to show the applicability of Theorem 4. Using the convergence criterion (51), we show that at the beginning of the iterative process it can be proven numerically that the method is convergent under the given initial approximations.
We apply the first four methods of the family (11) for calculating simultaneously all the zeros of the selected polynomials. In each example, we calculate the smallest that satisfies the convergence criterion (51). In accordance with Theorem 5, we use the following stop criterion
where and are defined by (52) and (53), respectively. To see the convergence behavior of the methods, we show in the tables in addition to .
In both examples, we take the same polynomials and initial approximations as in [11], where the initial approximations are chosen quite randomly. This choice gives the opportunity to compare numerically the convergence behavior of the multi-point Ehrlich-type methods with those of the multi-point Weierstrass-type methods which are studied in [11].
To present the calculated approximations of high accuracy, we implemented the corresponding algorithms using the programming package Wolfram Mathematica 10.0 with multiple precision arithmetic.
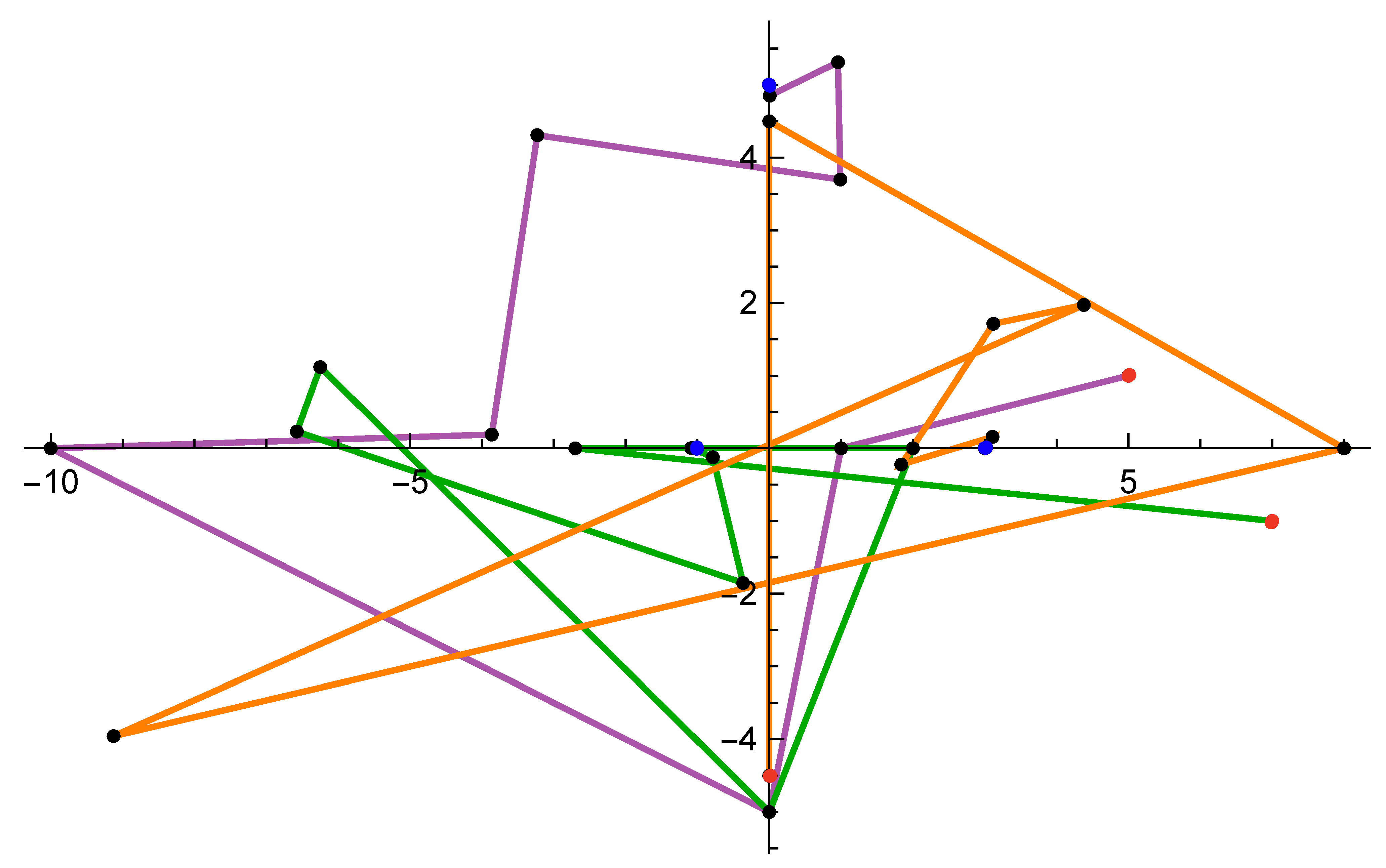
Example 1.
The first polynomial is
with zeros , 3 and (marked in blue in Figure 1). For , the initial approximations in are given in Table 2, where
In the case , the initial approximations are marked in red in Figure 1.
The numerical results for Example 1 are presented in Table 3. For instance, for the multi-point Ehrlich-type method (11) with , one can see that the convergence condition (51) is satisfied for which guarantees that the considered method is convergent with order of convergence . The stopping criterion (55) is satisfied for and at the sixth iteration the guaranteed accuracy is . At the next seventh iteration, the zeros of the polynomial f are calculated with accuracy .
In Figure 1, we present the trajectories of the approximations generated by the first six iterations of the method (11) for . We observe how each initial approximation, moving along a bizarre trajectory, finds a zero of the polynomial.
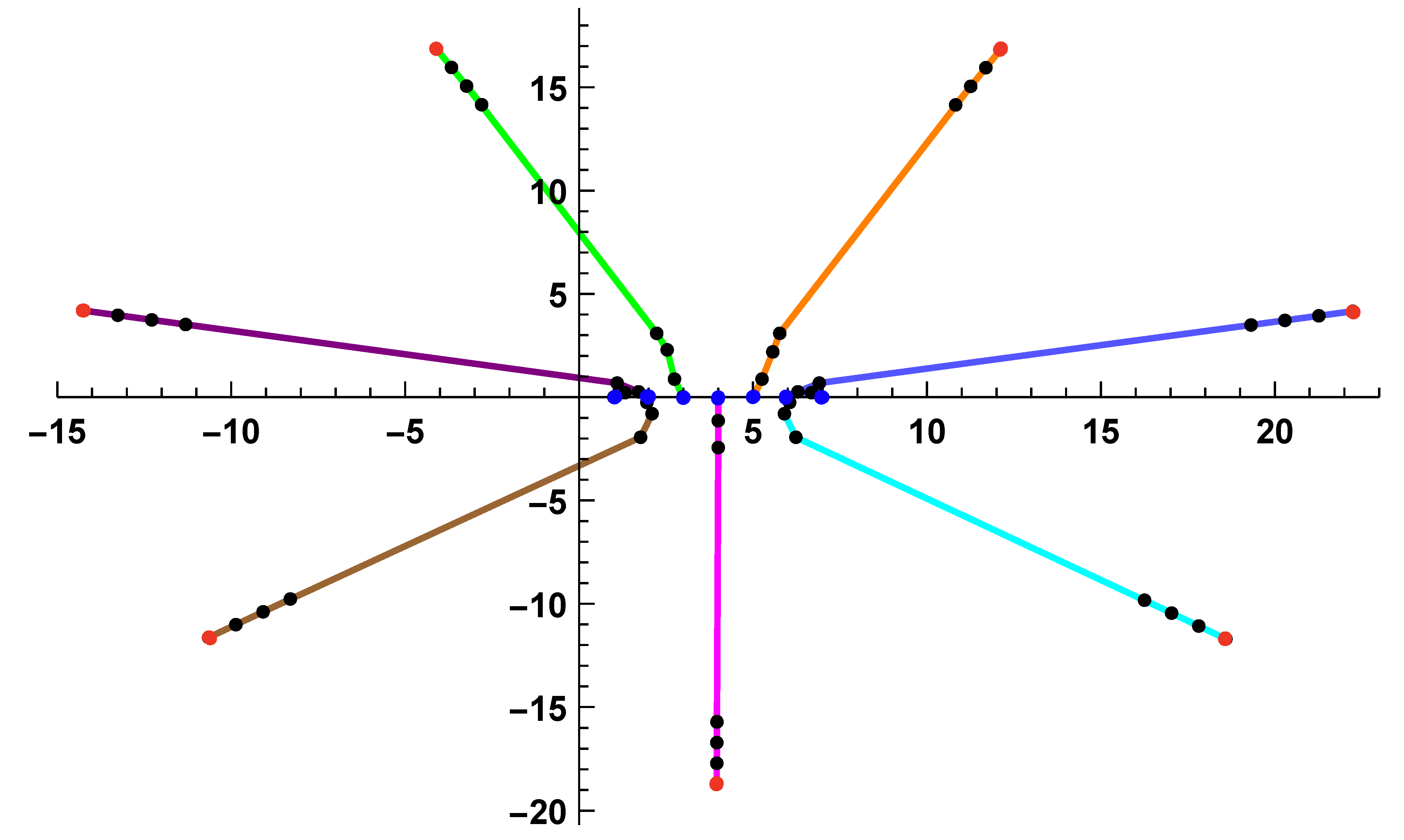
Example 2.
The numerical results for Example 2 are presented in Table 4. For example, for the multi-point Ehrlich-type method (11) with , the convergence condition (51) is satisfied for and the stopping criterion (55) is satisfied for which guarantees an accuracy . At the next ninth iteration, the zeros of the polynomial f are calculated with accuracy . In Figure 1, we present the trajectories of the approximations generated by the first seven iterations of the method (11) for . One can see that the trajectories are quite regular in the case of Aberth’s initial approximations.
7. Conclusions
In this paper, we introduced a new family of multi-points iterative methods for approximating all the zeros of a polynomial simultaneously. Let us note that the first member of this family is the two-point Ehrlich-type method introduced in 1999 by Trićković and Petković [9]. Its convergence order is .
We provide a local and semilocal convergence analysis of the new iterative methods. Our local convergence result (Theorem 2) contains the following information for each method: convergence order; initial conditions that guarantee the convergence; a priori and a posteriori error estimates. In particular, each method of the family has super-quadratic convergence of order . Our semilocal convergence result (Theorem 4) can be used to numerically prove the convergence of each method for a given polynomial and initial approximation.
Finally, we would like to note that the local convergence theorem was obtained by a new approach developed in our previous article [11]. We believe that this approach can be applied to obtain convergence results for other multi-point iterative methods.
Author Contributions
The authors contributed equally to the writing and approved the final manuscript of this paper. Both authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Science Fund of the Bulgarian Ministry of Education and Science under Grant DN 12/12.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declares no conflict of interest.
References
- Stewart, G.W. On the convergence of multipoint iterations. Numer. Math. 1994, 68, 143–147. [Google Scholar] [CrossRef] [Green Version]
- Abu-Alshaikh, I.; Sahin, A. Two-point iterative methods for solving nonlinear equations. Appl. Math. Comput. 2006, 182, 871–878. [Google Scholar] [CrossRef]
- Ignatova, B.; Kyurkchiev, N.; Iliev, A. Multipoint algorithms arising from optimal in the sense of Kung-Traub iterative procedures for numerical solution of nonlinear equations. Gen. Math. Notes 2011, 11, 45–79. [Google Scholar]
- Argyros, I.K.; González, D. Unified majorizing sequences for Traub-type multipoint iterative procedures. Numer. Algorithms 2013, 64, 549–565. [Google Scholar] [CrossRef]
- Tiruneh, A.T.; Ndlela, W.N.; Nkambule, S.J. A two-point Newton method suitable for nonconvergent cases and with super-quadratic convergence. Adv. Numer. Anal. 2013, 687382. [Google Scholar] [CrossRef] [Green Version]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint methods for solving nonlinear equations: A survey. Appl. Math. Comput. 2014, 226, 635–660. [Google Scholar] [CrossRef] [Green Version]
- Amat, S.; Argyros, I.; Busquier, S.; Hernández-Verón, M.A.; Rubio, M.J. A unified convergence analysis for some two-point type methods for nonsmooth operators. Mathematics 2019, 7, 701. [Google Scholar] [CrossRef] [Green Version]
- Kanno, S.; Kjurkchiev, N.V.; Yamamoto, T. On some methods for the simultaneous determination of polynomial zeros. Jpn. J. Indust. Appl. Math. 1996, 13, 267–288. [Google Scholar] [CrossRef]
- Tričković, S.B.; Petković, M.S. Multipoint methods for the determination of multiple zeros of a polynomial. Novi Sad J. Math. 1999, 29, 221–233. [Google Scholar]
- Proinov, P.D.; Petkova, M.D. Convergence of the two-point Weierstrass root-finding method. Jpn. J. Indust. Appl. Math. 2014, 31, 279–292. [Google Scholar] [CrossRef]
- Proinov, P.D.; Petkova, M.D. Local and semilocal convergence of a family of multi-point Weierstrass-type root-finding methods. Mediterr. J. Math. 2020, 17, 107. [Google Scholar] [CrossRef]
- Weierstrass, K. Neuer Beweis des Satzes, dass jede ganze rationale Function einer Veränderlichen dargestellt werden kann als ein Product aus linearen Functionen derselben Veränderlichen. Sitzungsber. Königl. Akad. Wiss. Berlin 1891, II, 1085–1101. [Google Scholar] [CrossRef]
- Ehrlich, L. A modified Newton method for polynomials. Commun. ACM 1967, 10, 107–108. [Google Scholar] [CrossRef]
- Aberth, O. Iteration methods for finding all zeros of a polynomial simultaneously. Math. Comput. 1973, 27, 339–344. [Google Scholar] [CrossRef]
- Börsch-Supan, W. Residuenabschätzung für Polynom-Nullstellen mittels Lagrange-Interpolation. Numer. Math. 1969/70, 14, 287–296. [Google Scholar] [CrossRef]
- Werner, W. On the simultaneous determination of polynomial roots. In Iterative Solution of Nonlinear Systems of Equations (Oberwolfach, 1982); Springer: Berlin, Germany; New York, NY, USA, 1982; Volume 953, pp. 188–202. [Google Scholar]
- Proinov, P.D.; Vasileva, M.T. On the convergence of high-order Ehrlich-type iterative methods for approximating all zeros of a polynomial simultaneously. J. Inequal. Appl. 2015, 2015, 336. [Google Scholar] [CrossRef]
- Proinov, P.D. General convergence theorems for iterative processes and applications to the Weierstrass root-finding method. J. Complex. 2016, 33, 118–144. [Google Scholar] [CrossRef]
- Proinov, P.D. Relationships between different types of initial conditions for simultaneous root finding methods. Appl. Math. Lett. 2016, 52, 102–111. [Google Scholar] [CrossRef]
- Proinov, P.D.; Ivanov, S.I. Convergence analysis of Sakurai-Torii-Sugiura iterative method for simultaneous approximation of polynomial zeros. J. Comput. Appl. Math. 2019, 357, 56–70. [Google Scholar] [CrossRef]
- Cholakov, S.I.; Vasileva, M.T. A convergence analysis of a fourth-order method for computing all zeros of a polynomial simultaneously. J. Comput. Appl. Math. 2017, 321, 270–283. [Google Scholar] [CrossRef]
- Ivanov, S.I. A unified semilocal convergence analysis of a family of iterative algorithms for computing all zeros of a polynomial simultaneously. Numer. Algorithms 2017, 75, 1193–1204. [Google Scholar] [CrossRef]
Figure 1.
Trajectories of the approximations for Example 1 ().

Figure 2.
Trajectories of the approximations for Example 2 ().


{kind=link}
{kind=link}
Table 1.
Values of the convergence order for .
| N | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
Table 2.
Initial approximations for Example 1.
| N | |||||
|---|---|---|---|---|---|
| 1 | − | − | − | a | b |
| 2 | − | − | a | b | c |
| 3 | − | a | b | c | u |
| 4 | a | b | c | u | v |
Table 3.
Convergence behavior for Example 1 ().
| N | m | k | r | ||||
|---|---|---|---|---|---|---|---|
| 1 | 4 | 5 | |||||
| 2 | 5 | 5 | |||||
| 3 | 6 | 6 | |||||
| 4 | 7 | 7 |
Table 4.
Convergence behavior for Example 2 ().
| N | m | k | ||||
|---|---|---|---|---|---|---|
| 1 | 18 | 21 | ||||
| 2 | 6 | 8 | ||||
| 3 | 7 | 8 | ||||
| 4 | 14 | 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Proinov, P.D.; Petkova, M.D. On the Convergence of a New Family of Multi-Point Ehrlich-Type Iterative Methods for Polynomial Zeros. Mathematics 2021, 9, 1640. https://0-doi-org.brum.beds.ac.uk/10.3390/math9141640
AMA Style
Proinov PD, Petkova MD. On the Convergence of a New Family of Multi-Point Ehrlich-Type Iterative Methods for Polynomial Zeros. Mathematics. 2021; 9(14):1640. https://0-doi-org.brum.beds.ac.uk/10.3390/math9141640
Chicago/Turabian StyleProinov, Petko D., and Milena D. Petkova. 2021. "On the Convergence of a New Family of Multi-Point Ehrlich-Type Iterative Methods for Polynomial Zeros" Mathematics 9, no. 14: 1640. https://0-doi-org.brum.beds.ac.uk/10.3390/math9141640
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.