A Transdisciplinary Approach for Analyzing Stress Flow Patterns in Biostructures

 ,
,
Abstract
:1. Introduction
2. Network Flow
- directed graph G (V, E), where V is a finite set of vertices, and E is a subset of ordered pairs of vertices representing the edges;
- vertex s ∈ V that has only outgoing edges represented as the source node;
- vertex t ∈ V that has only incoming edges represented as the sink node; and
- positive function c: E → R+ called the capacity function.
- Capacity constraint ∀u, v ∈ V requires that f(u, v) ≤ c(u, v); flow cannot exceed the capacity of the respective edge.
- Conservation of flow ∀u, v ∈ V − (s, t) requires that
- (a)
- ,
- (b)
- the total flow entering a node must equal the total flow leaving that node provided the node is not a source or sink node, and
- the total flow leaving the source node s must be equal to the total flow entering sink node t.
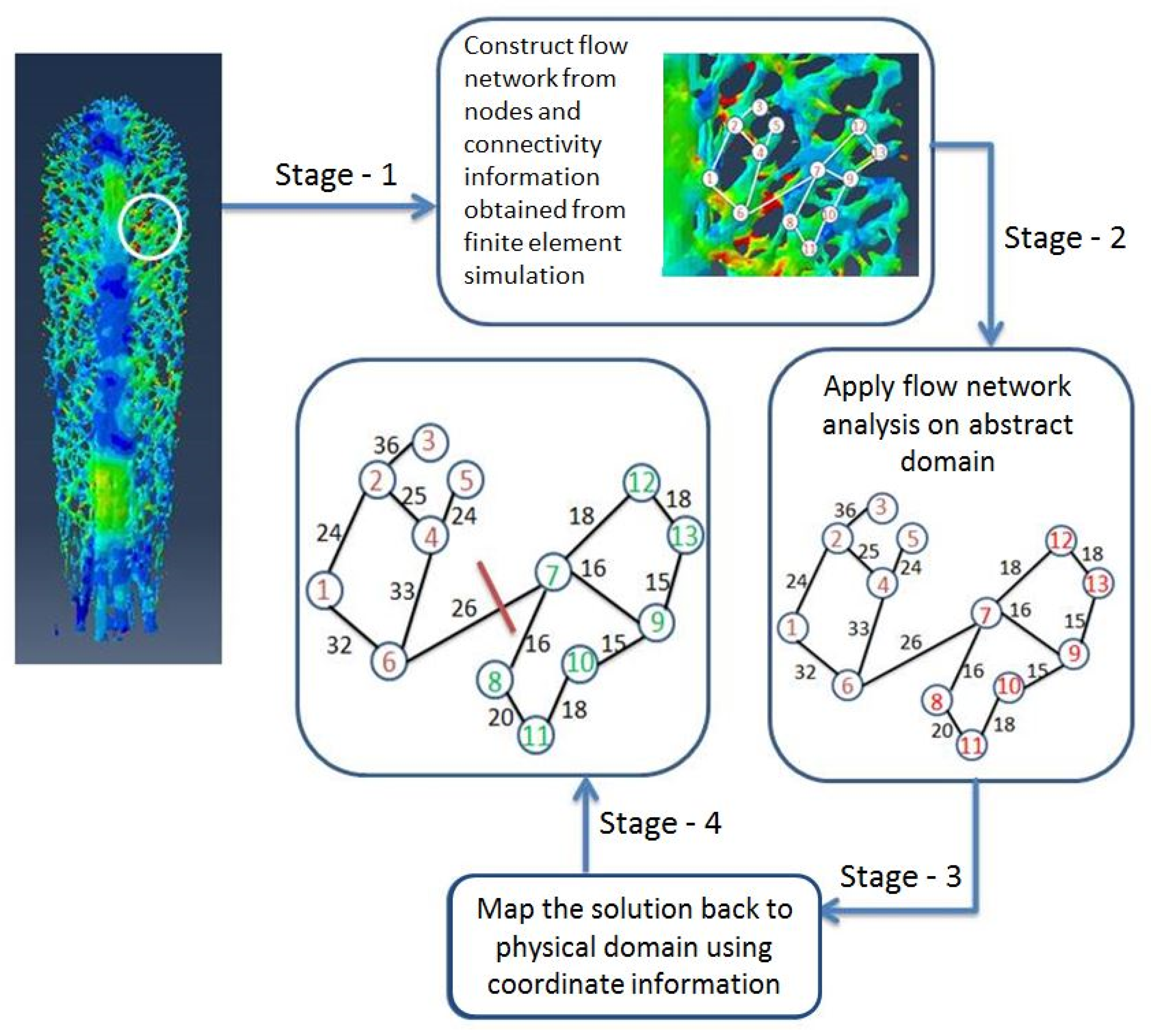
3. Formulation of the Biostructure as Network Flow Problem
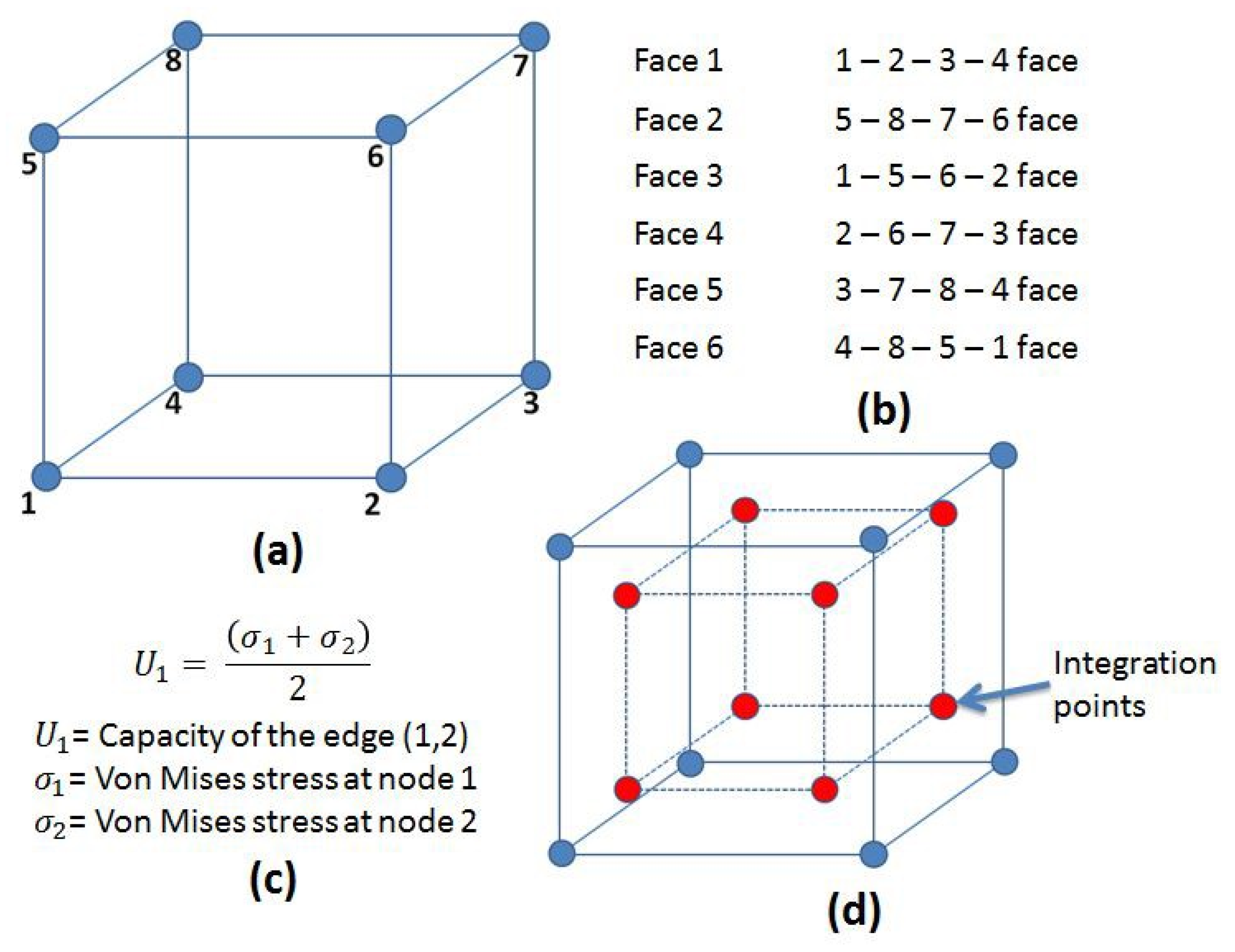
- V represents the nodes obtained from the finite element model of the biostructure. As shown in Figure 2a, for a hexahedral element in a finite element model, nodes are 1, 2, …, 8.
- E represents the edges, connecting the nodes in V, indicating connectivity A between the nodes. The edges of a hexahedral element, as shown in Figure 2a, are {(1, 2), (2, 3), (3, 4), (4, 1)} for Face 1.
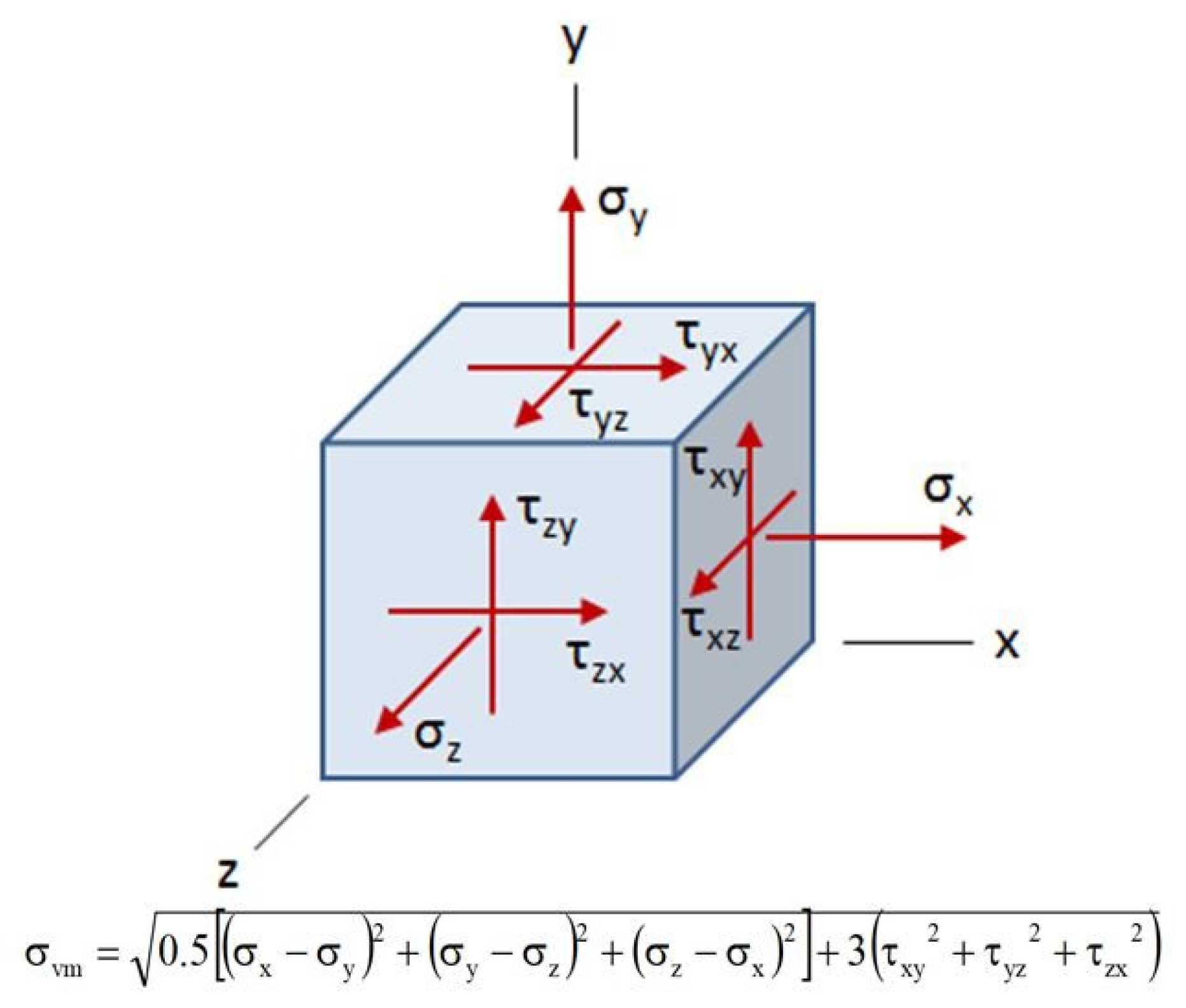
- Each edge (u, v) ∈ E has a capacity U associated with it that is representative of the maximum amount of flow that could be transmitted through the edge. Capacity calculation for Edge (1, 2) is shown in Figure 2c. Capacity for Edge (1, 2) is the average of the von Mises stresses at Nodes 1 and 2.
4. Verification of Approach on Known Datasets
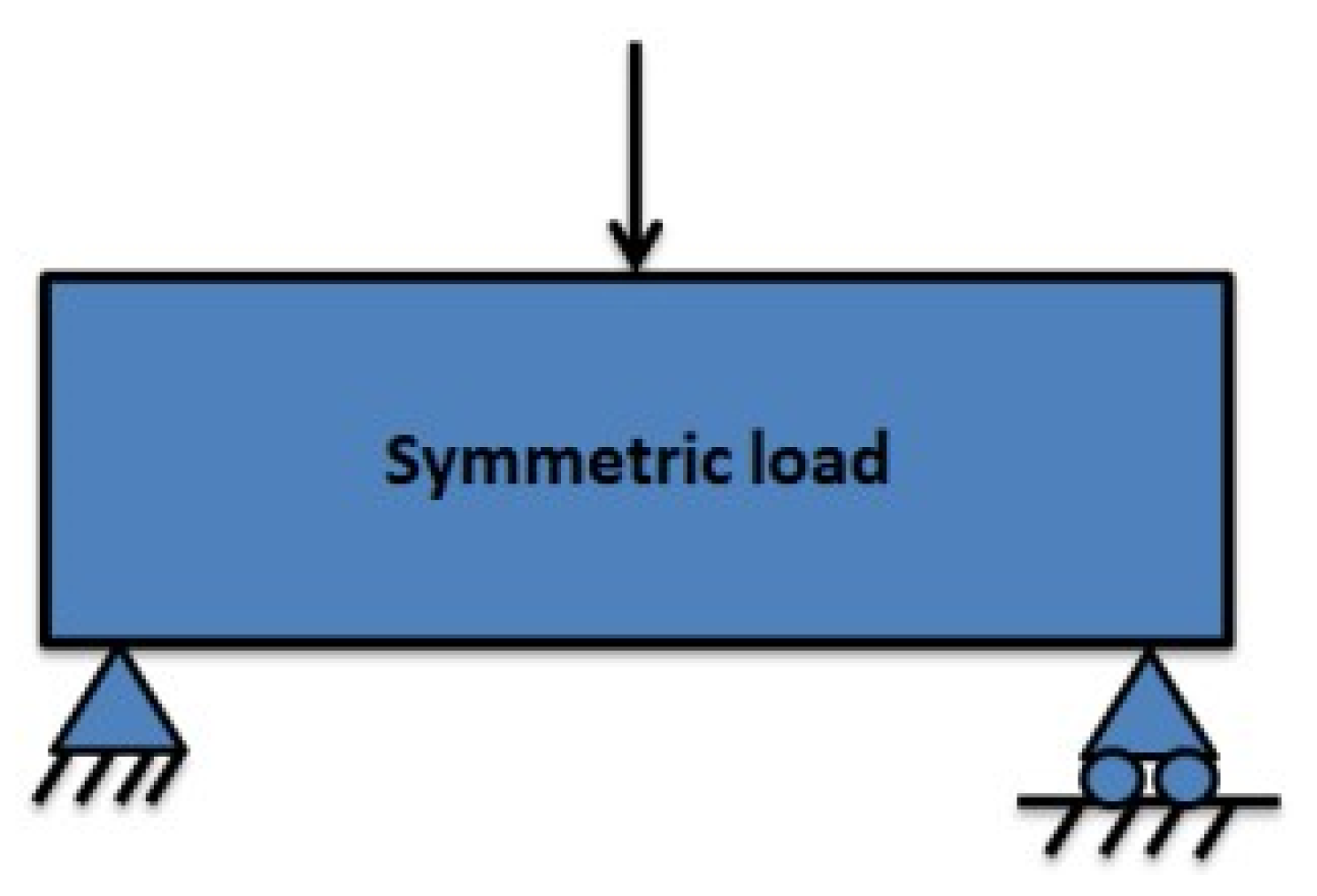
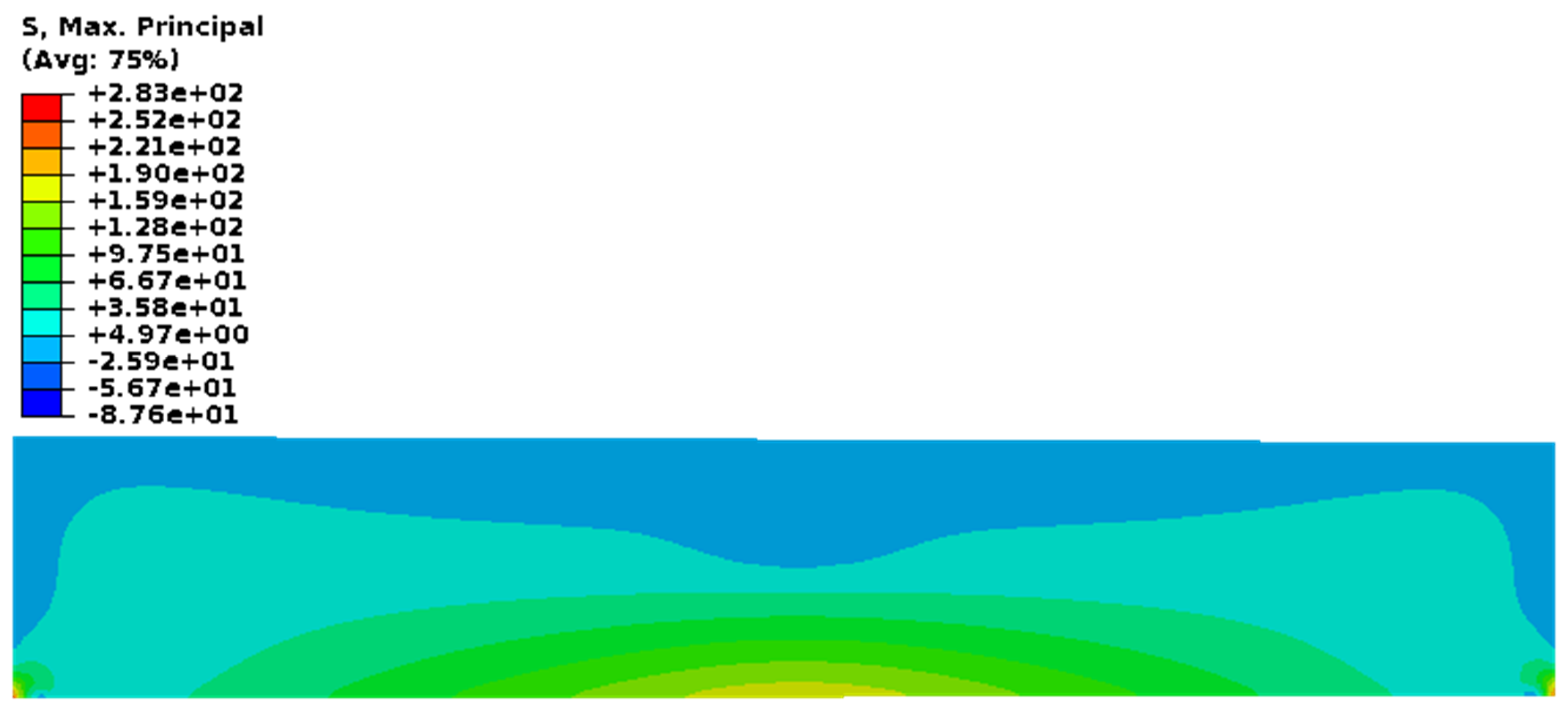
4.1. Problem 1: Three-Point Bending of a Simply Supported Beam
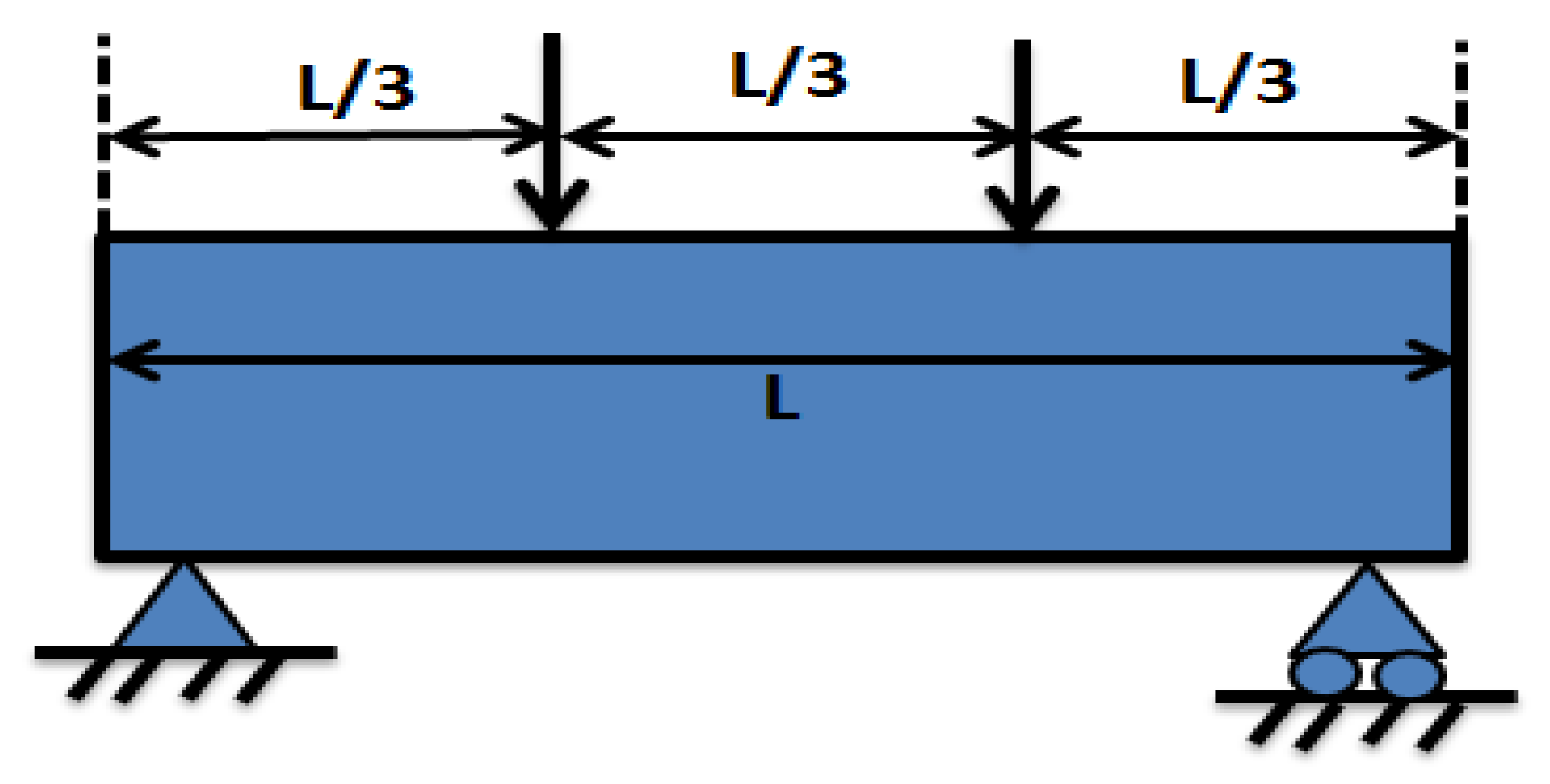
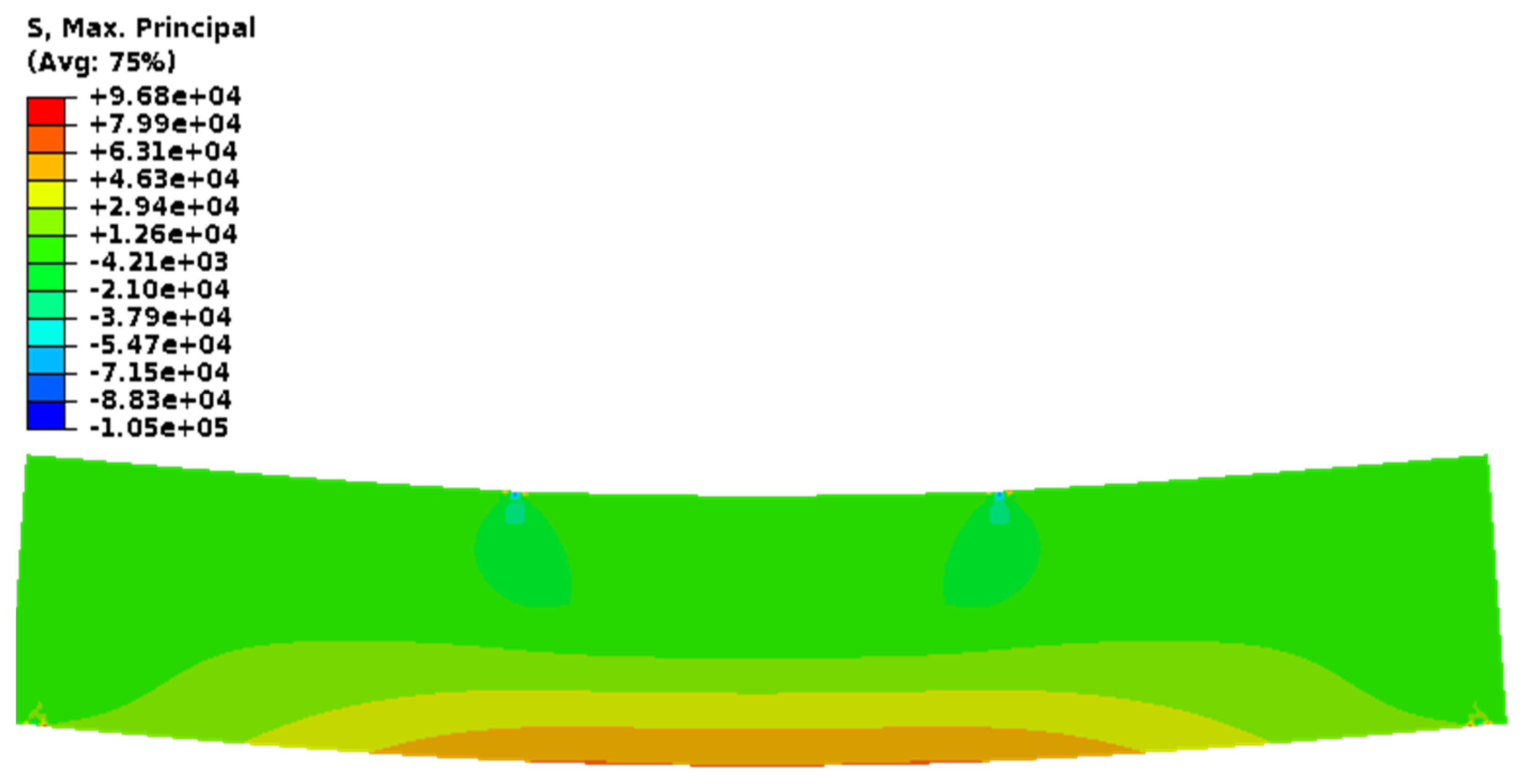
4.2. Problem 2: Four-Point Bending of a Simply Supported Beam
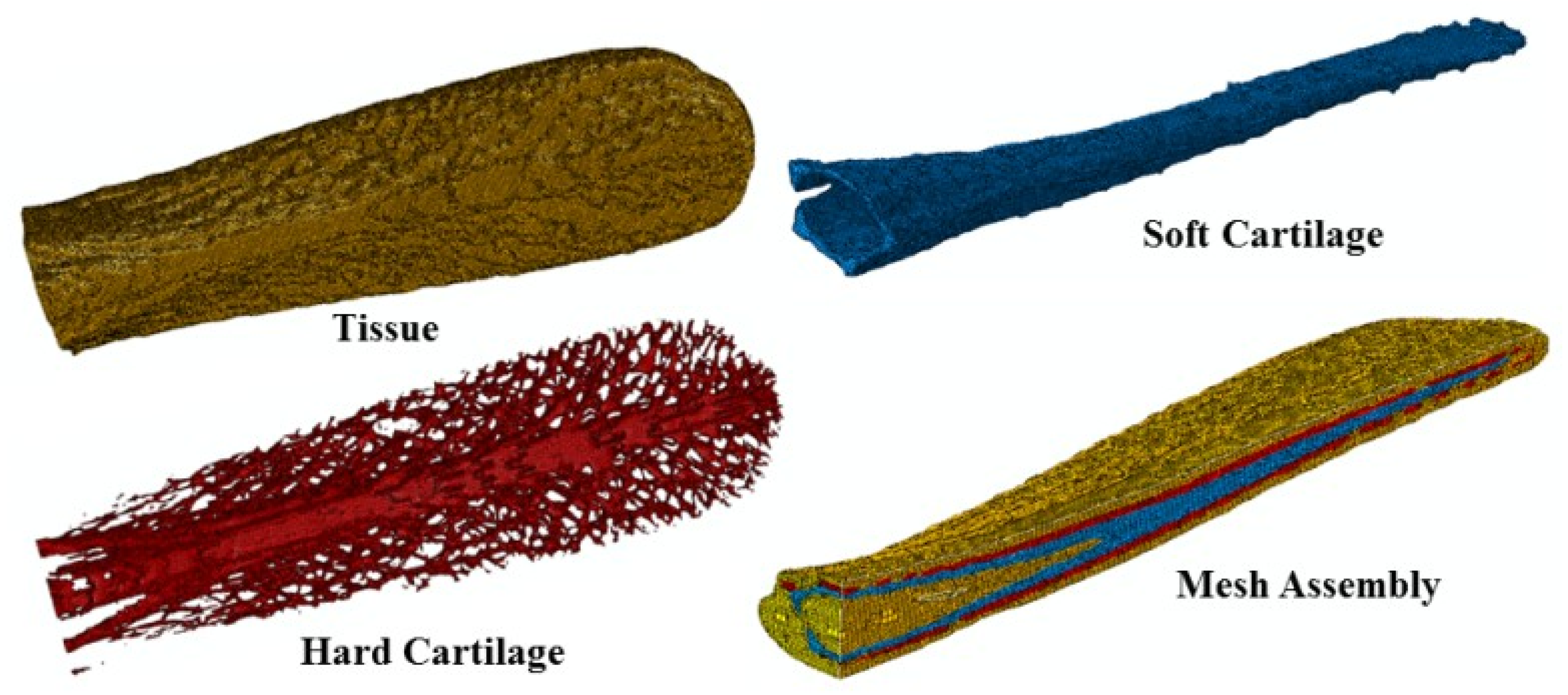
5. Computational Mechanics Experiments on the Rostrum
5.1. Material Properties
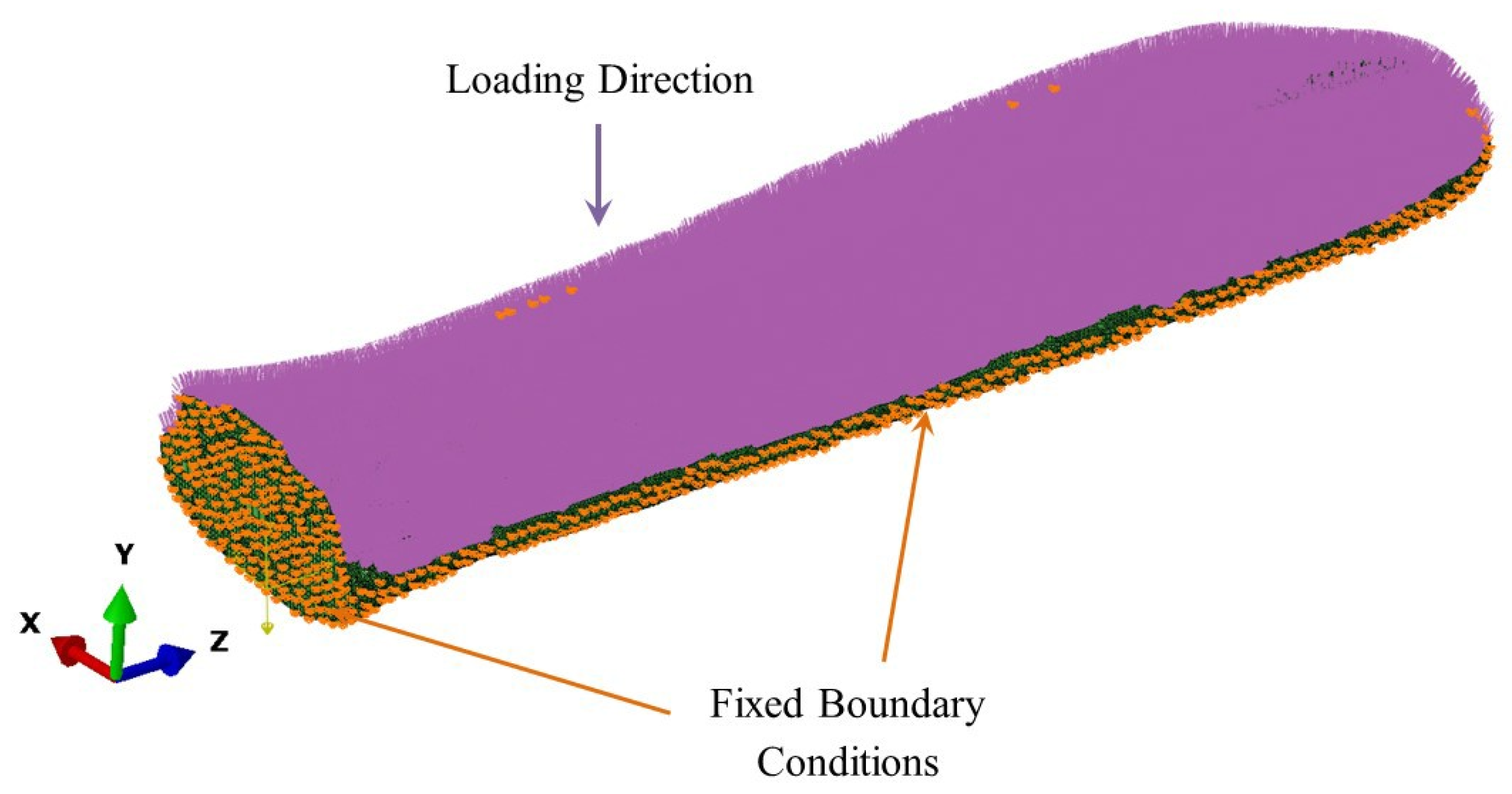
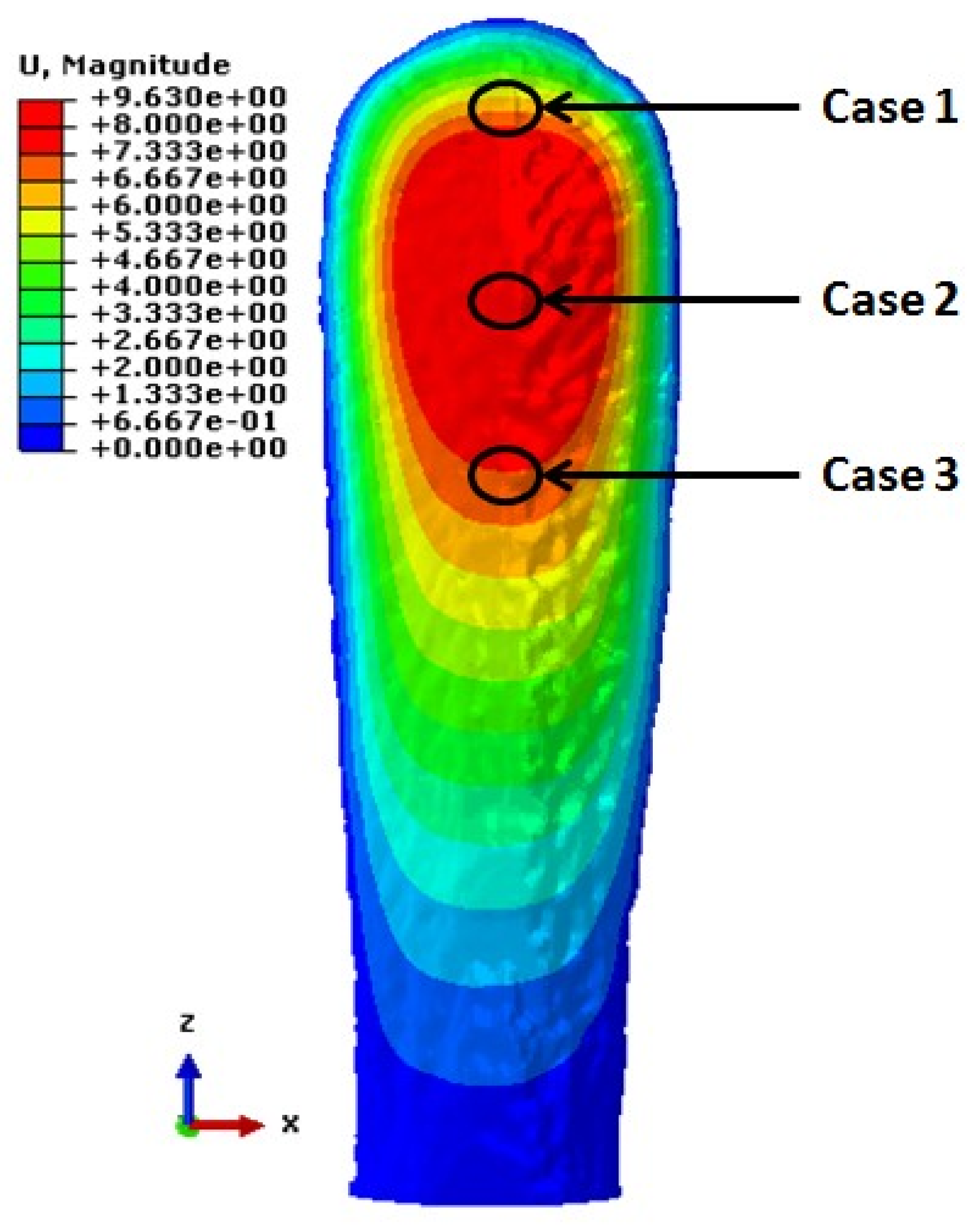
5.2. Force and Displacement Boundary Conditions
6. Results
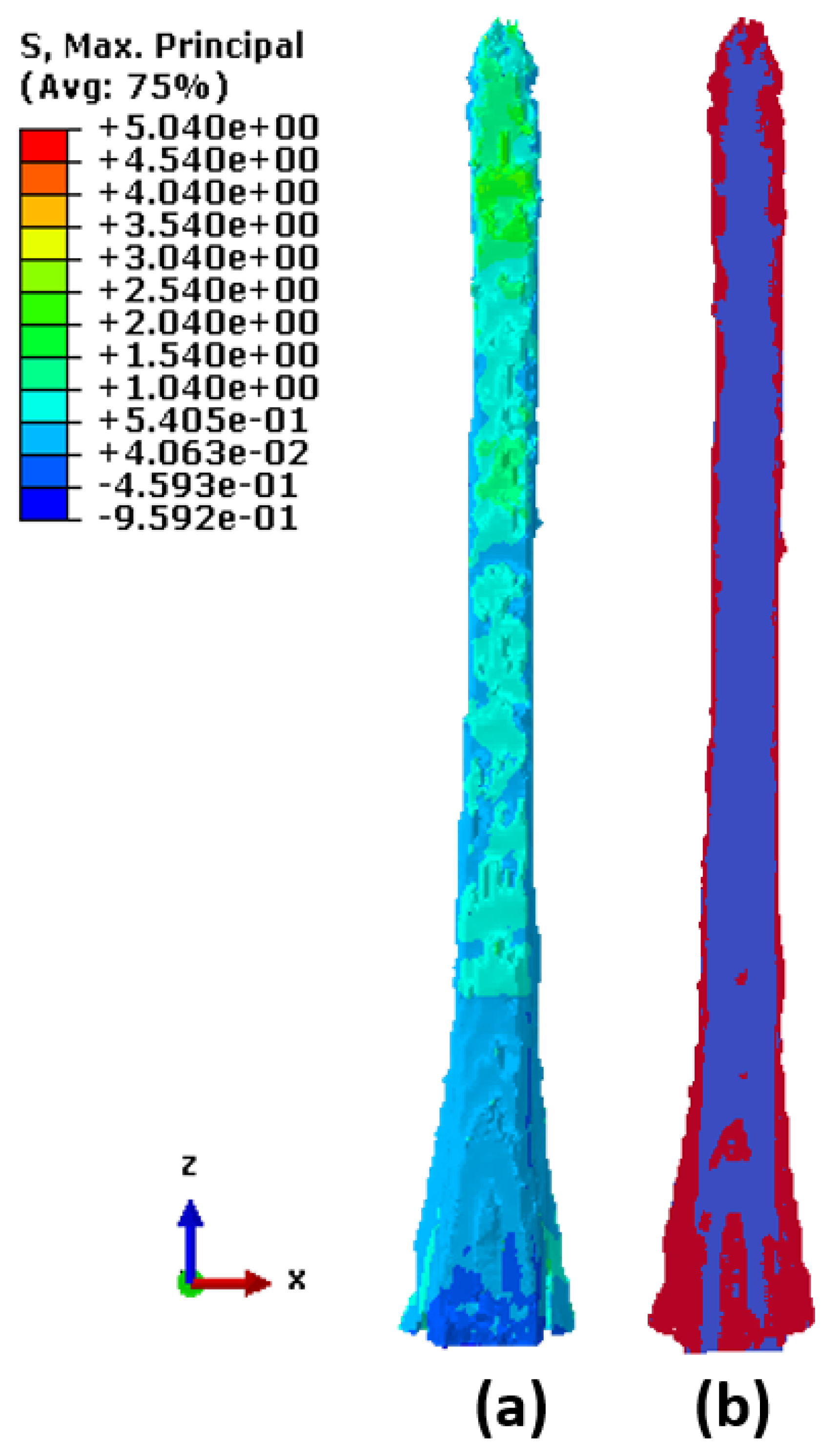
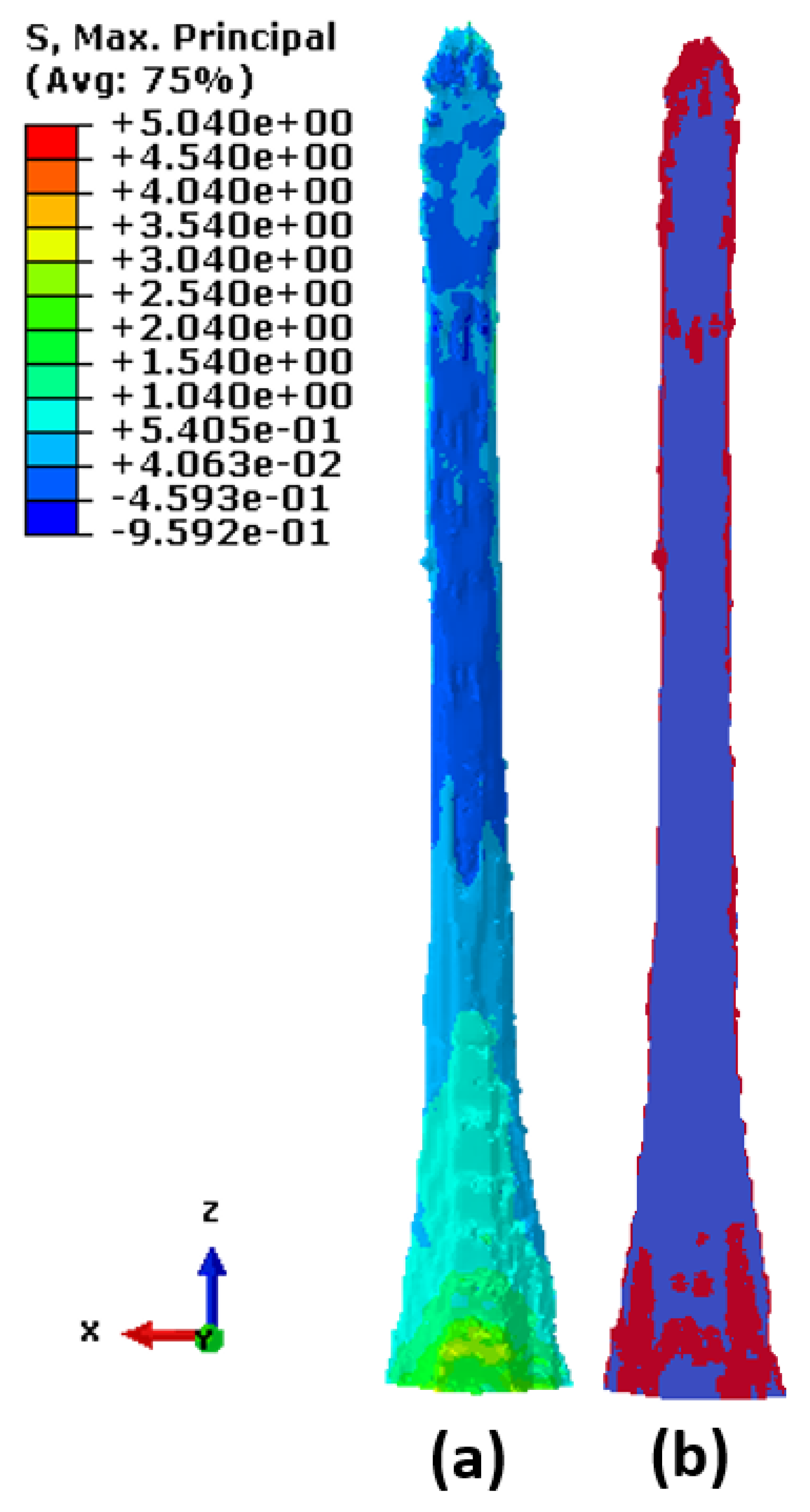
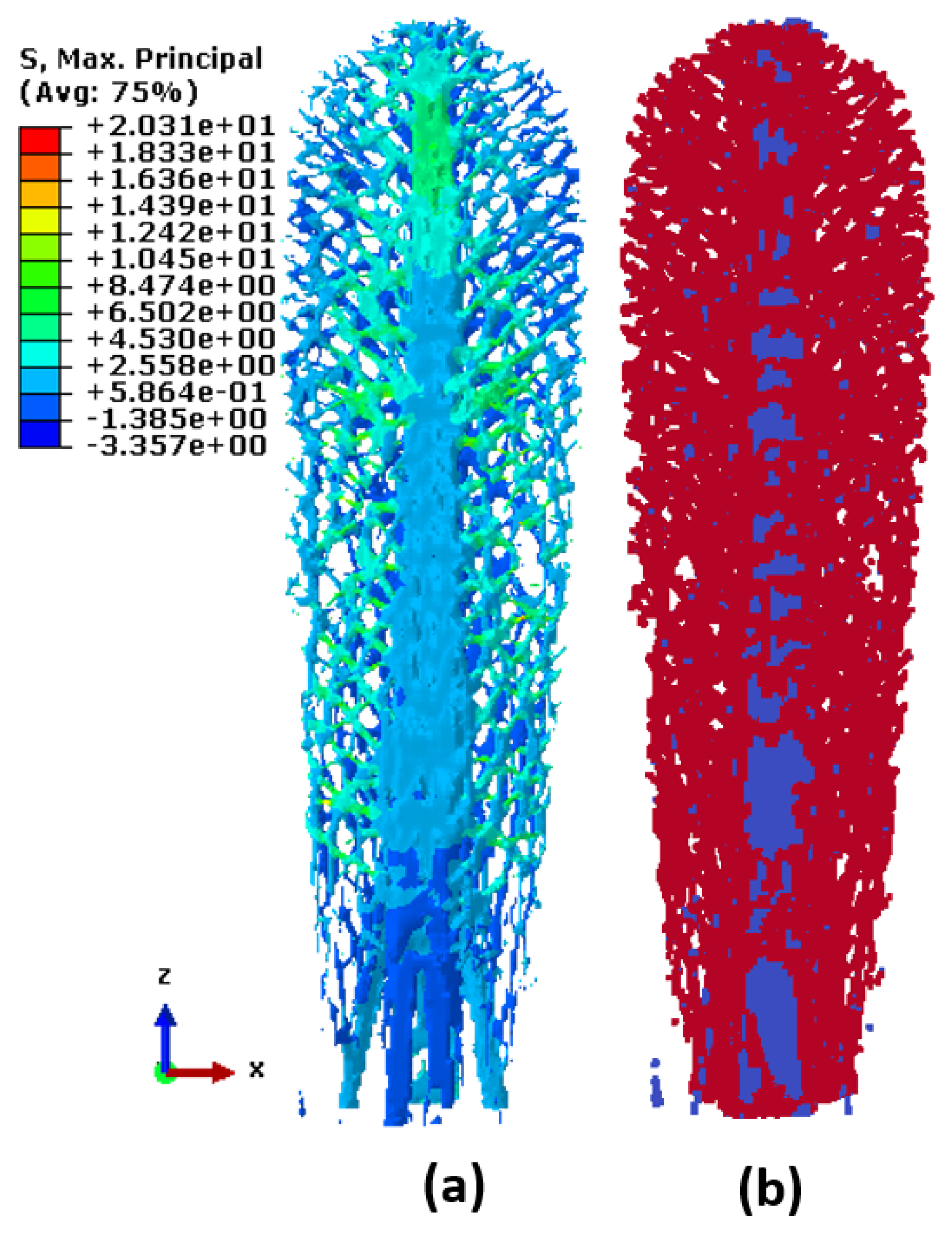
6.1. Flow Network Analysis on Soft Cartilage of the Rostrum
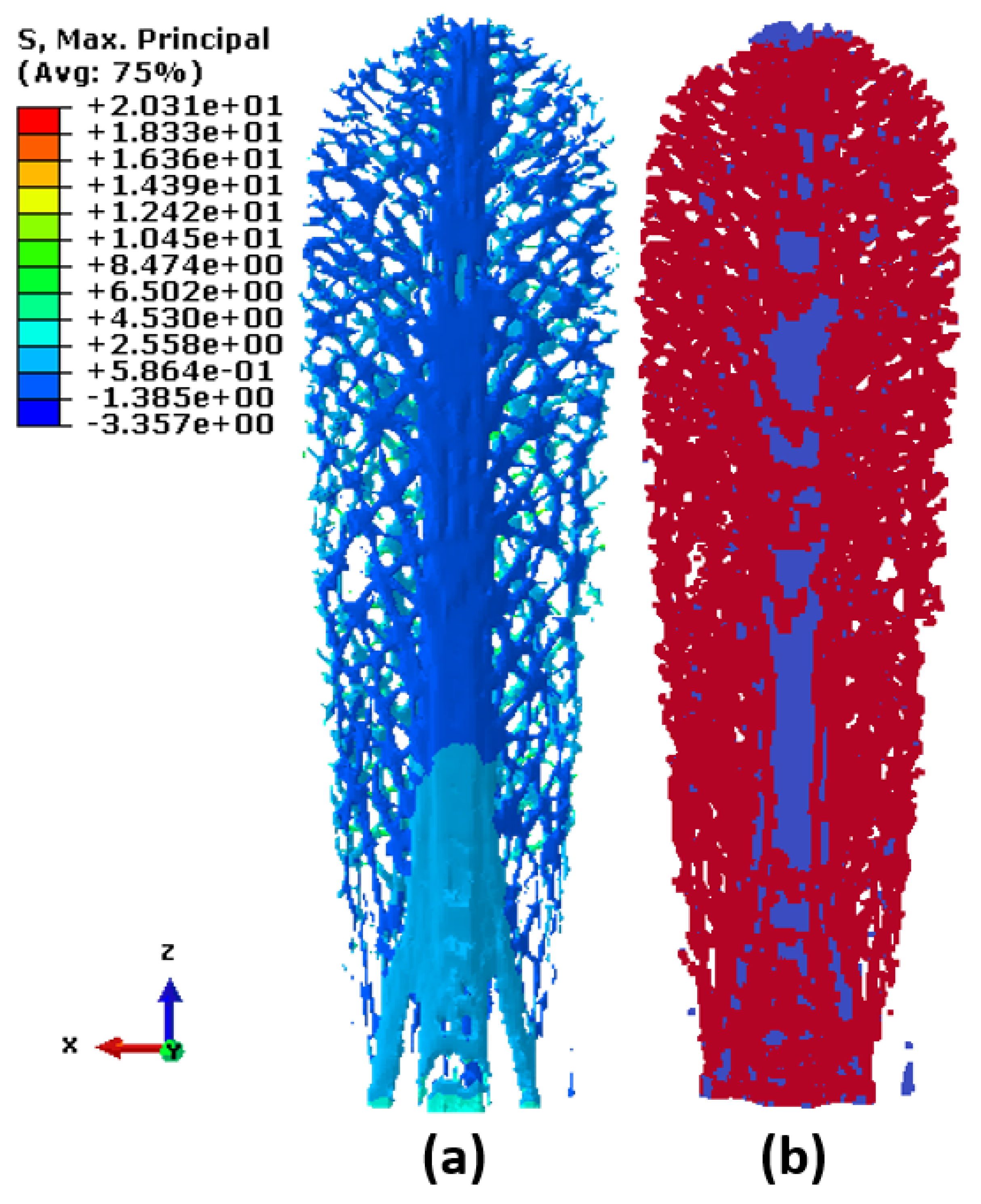
6.2. Flow Network Analysis on Hard Cartilage of Rostrum
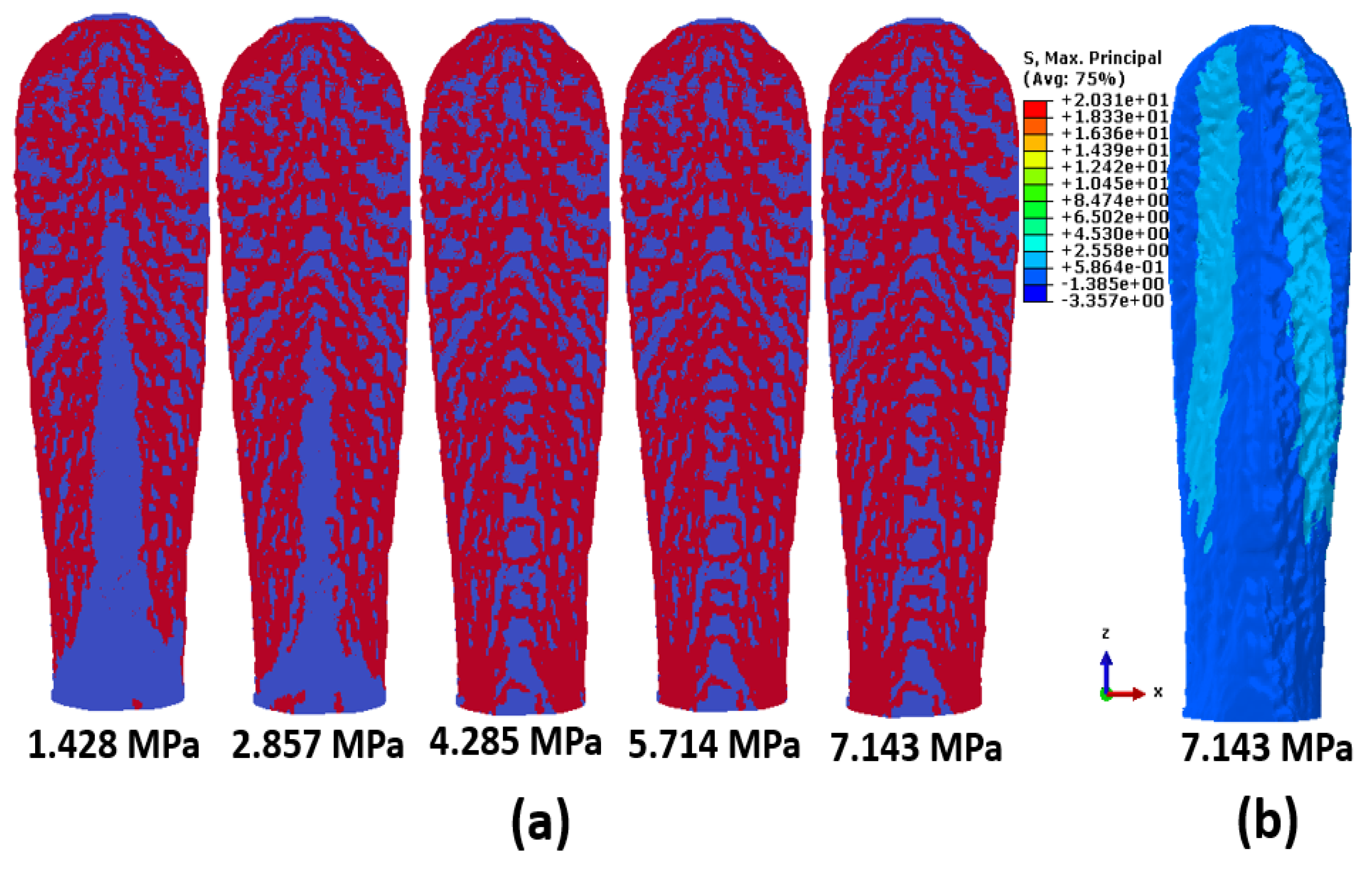
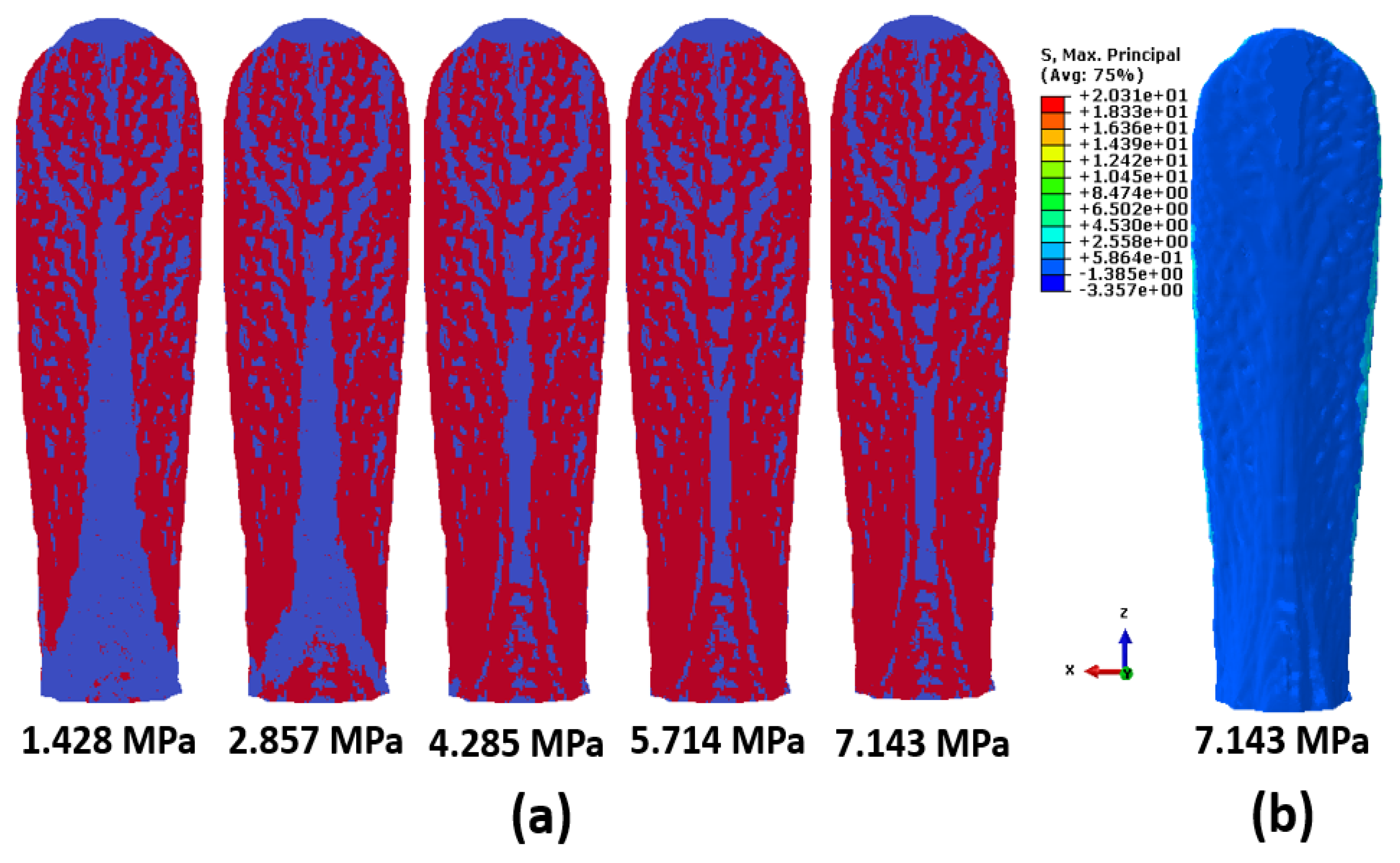
6.3. Flow Network Analysis on Rostrum Tissue
7. Conclusions
8. Comments on the Transdisciplinary Approach
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Aggelis, D.G. Classification of cracking mode in concrete by acoustic emission parameters. Mech. Res. Commun. 2011, 38, 153–157. [Google Scholar] [CrossRef]
- Carpinteri, A.; Lacidogna, G.; Niccolini, G.; Puzzi, S. Critical defect size distributions in concrete structures detected by the acoustic emission technique. Meccanica 2008, 43, 349–363. [Google Scholar] [CrossRef]
- Farhidzadeh, A.; Salamone, S.; Singla, P. A probabilistic approach for damage identification and crack classification in reinforced concrete structures. J. Intell. Mater. Syst. Struct. 2013, 24, 1722–1735. [Google Scholar] [CrossRef]
- Farhidzadeha, A.; Mpalaskasb, A.C.; Matikasb, T.E.; Farhidzadehc, H.; Aggelis, D.G. Fracture mode identification in cementitious materials using supervised pattern recognition of acoustic emission features. Constr. Build. Mater. 2014, 67, 129–138. [Google Scholar] [CrossRef]
- Kageyama, K.; Murayama, H.; Ohsawa, I.; Kanai, M.; Nagata, K.; Machijima, Y. Acoustic emission monitoring of a reinforced concrete structure by applying new fiber-optic sensors. Smart Mater. Struct. 2005, 14, s52–s59. [Google Scholar] [CrossRef]
- Ohtsu, M.; Uchida, M.; Okamoto, T.; Yuyama, S. Damage assessment of reinforced concrete beams qualified by acoustic emission. ACI Struct. J. 2002, 99, 411–417. [Google Scholar]
- Shiotani, T.; Aggelis, D.G.; Makishima, O. Global monitoring of large concrete structures using acoustic emission and ultrasonic techniques: Case study. J. Bridge Eng. 2009, 14, 188–192. [Google Scholar] [CrossRef]
- Bahlouli, N.; Guil, S.M.; Ahzi, S.; Laberge, M. Stress-strain response of biomaterials by a digital image correlation method: Application to tecoflex. J. Mater. Sci. Technol. 2004, 20, 114–116. [Google Scholar]
- Carroll, J.; Efstathiou, C.; Lambros, J.; Sehitoglu, H.; Hauber, B.; Spottswood, S.; Chona, R. Investigation of fatigue crack closure using multiscale image correlation experiments. Eng. Fract. Mech. 2009, 76, 2384–2398. [Google Scholar] [CrossRef]
- Fazzini, M.; Mistou, S.; Karama, M. Identification of elastomers by digital image correlation. In Proceedings of the 5th European Conference on Constitutive Models for Rubber, Paris, France, 4–7 September 2007. [Google Scholar]
- Goh, C.P.; Ratnam, M.M.; Ismail, H. Large in-plane deformation mapping and determination of young’s modulus of rubber using scanner-based digital image correlation. Exp. Tech. 2015, 40, 1117–1127. [Google Scholar] [CrossRef]
- Gonzáles, G.L.; González, J.A.; Castro, J.T.; Freire, J.L. A J-integral approach using digital image correlation for evaluating stress intensity factors in fatigue cracks with closure effects. Theor. Appl. Fract. Mech. 2017, 90, 14–21. [Google Scholar] [CrossRef]
- Lopez-Crespo, P.; Shterenlikht, A.; Yates, J.; Patterson, E.; Withers, P. Some experimental observations on crack closure and crack-tip plasticity. Fatigue Fract. Eng. Mater. Struct. 2009, 32, 418–429. [Google Scholar] [CrossRef]
- Mudassar, A.A.; Butt, S. Improved digital image correlation method. Opt. Lasers Eng. 2016, 87, 156–167. [Google Scholar] [CrossRef]
- Sutton, M.A.; McNeill, S.R.; Helm, J.D.; Chao, Y.J. Advances in Two-Dimensional and Three Dimensional Computer Vision. In Photomechanics; Springer: Berlin/Heidelberg, Germany, 2000; pp. 323–372. [Google Scholar]
- Sutton, M.A.; Orteu, J.J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications; Springer Science and Business Media: New York, NY, USA, 2009. [Google Scholar]
- Vasco-Olmo, J.; Díaz, F.; García-Collado, A.; Dorado-Vicente, R. Experimental evaluation of crack shielding during fatigue crack growth using digital image correlation. Fatigue Fract. Eng. Mater. Struct. 2015, 38, 223–237. [Google Scholar] [CrossRef]
- Hallgren, M.; Bjerke, M. Non-linear finite element analyses of punching shear failure of column footings. Cem. Concr. Compos. 2002, 24, 491. [Google Scholar] [CrossRef]
- Mamede, N.F.; Ramos, A.P.; Faria, D.M. Experimental and parametric 3D nonlinear finite element analysis on punching of flat slabs with orthogonal reinforcement. Eng. Struct. 2013, 48, 442–457. [Google Scholar] [CrossRef]
- Shu, J.; Plos, M.; Zandi, K.; Johansson, M.; Nilenius, F. Prediction of punching behavior of RC slabs using continuum non-linear FE analysis. Eng. Struct. 2016, 15, 15–25. [Google Scholar] [CrossRef]
- Borderie, C.L.; Lawrence, C.; Menou, A. Approche mésoscopique du comportement du béton: Apport de la représentation géométrique. Revue Européenne de Génie Civil 2007, 11, 407–421. [Google Scholar] [CrossRef]
- Grassl, P.; Grégoire, D.; Rojas-Solano, L.B.; Pijaudier-Cabot, G. Meso-scale modelling of the size effect on the fracture process zone of concrete. Int. J. Solids Struct. 2012, 49, 1818–1827. [Google Scholar] [CrossRef] [Green Version]
- Grégoire, D.; Verdon, L.B.; Lefort, V.; Grassl, P.; Saliba, J.; Regoin, J.P.; Loukili, A.; Pijaudier-Cabot, G. Mesoscale analysis of failure in quasi-brittle materials: Comparison between lattice model and acoustic emission data. Int. J. Numer. Anal. Methods Geomech. 2015, 39, 1639–6164. [Google Scholar] [CrossRef]
- Flores-Johnson, E.; Shen, L.; Guiamatsia, I.; Nguyen, G.D. A numerical study of bioinspired nacre-like composite plates under blast loading. Compos. Struct. 2015, 126, 329–336. [Google Scholar] [CrossRef] [Green Version]
- Flores-Johnson, E.; Shen, L.; Guiamatsia, I.; Nguyen, G.D. Numerical investigation of the impact behavior of bioinspired nacre-like aluminum composite plates. Compos. Sci. Technol. 2014, 96, 13–22. [Google Scholar] [CrossRef]
- Tran, P.; Ngo, T.D.; Mendis, P. Bioinspired composite structures subjected to under water impulsive loading. Comput. Mater. Sci. 2014, 82, 134–139. [Google Scholar] [CrossRef]
- Bertsekas, D.P. Network Optimization: Continuous and Discrete Models (Optimization, Computation, and Control); Athena Scientific: Nashua, NH, USA, 1998. [Google Scholar]
- Lin, Q.; Tordesillas, A. Towards an optimization theory for deforming dense granular materials: Minimum cost maximum flow solutions. J. Ind. Manag. Optim. 2014, 10, 337. [Google Scholar] [CrossRef]
- Tordesillas, A.; Tobin, S.T.; Cil, M.; Alshibli, K.; Behringer, R.P. Network flow model of force transmission in unbonded and bonded granular media. Phys. Rev. E 2015, 91, 062204. [Google Scholar] [CrossRef]
- Lefort, V.; Pijaudier-Cabot, G.; Grégoire, D. Analysis by Ripley’s function of the correlations involved during failure in quasi-brittle materials: Experimental and numerical investigations at the mesoscale. Eng. Fract. Mech. 2015, 147, 449–467. [Google Scholar] [CrossRef]
- Ripley, B.D. Modelling spatial patterns. J. R. Stat. Soc. Ser. B Methodol. 1977, 39, 172–212. [Google Scholar] [CrossRef]
- Duncan, R.P. Flood disturbance and the coexistence of species in a lowland podocarp forest, south Westland, New Zealand. J. Ecol. 1993, 81, 403–416. [Google Scholar] [CrossRef]
- Stamp, N.E.; Lucas, J.R. Spatial Patterns and Dispersal Distances of Explosively Dispersing Plants in Florida Sandhill Vegetation. J. Ecol. 1990, 78, 589–600. [Google Scholar] [CrossRef]
- Diggle, P.J.; Chetwynd, A.G. Second-Order Analysis of Spatial Clustering for Inhomogeneous Populations. Biometrics 1991, 47, 1155–1163. [Google Scholar] [CrossRef]
- Weiner, S.; Wagner, H.D. The material bone: Structure-Mechanical Function Relation. Annu. Rev. Mater. Sci. 1998, 28, 271–298. [Google Scholar] [CrossRef]
- Hoover, J.J.; George, S.G.; Killgore, K.J. Rostrum size of paddlefish (Polyodon spathula) (Acipenseiformes: Polyodontidae) from the Mississippi Delta. Copeia 2000, 1, 288–290. [Google Scholar] [CrossRef]
- Kuhajda, B.R. Polyodontidae: Paddlefishes; Johns Hopkins University Press: Baltimore, MD, USA, 2014. [Google Scholar]
- Riveros, G.A.; Patel, R.R.; Hoover, J.J. Swimming and Energy Dissipation Enhancement Induced by the Rostrum of the Paddlefish (Polyodon spathula): A Multiphysics, Fluid-Structure Interaction Analysis. In Proceedings of the Materials Research Society Fall Meeting, Boston, MA, USA, 29 November–4 December 2015. [Google Scholar]
- Patel, R.R.; Riveros, G.A.; Thompson, D.S.; Acosta, F.J.; Perkins, E.J.; Hoover, J.J.; Peters, J.F.; Tordesillas, A. Early Detection of Failure Mechanisms in Resilient Biostructures: A Network Flow Study; ERDC: Vicksburg, MS, USA, 2017. [Google Scholar]
- Patel, R.R.; Valles, D.; Riveros, G.A.; Thompson, D.S.; Perkins, E.J.; Hoover, J.J.; Peters, J.F.; Tordesillas, A. Stress flow analysis of biostructures using the finite element method and the flow network approach. Finite Elem. Anal. Des. 2018, 152, 46–54. [Google Scholar] [CrossRef]
- Bondy, J.A.; Murty, U.S.R. Graph Theory. In Graduate Texts in Mathematics; Springer: New York, NY, USA, 2008. [Google Scholar]
- Jungnickel, D. Graphs, Networks and Algorithms. In Algorithms and Computation in Mathematics 5, 3rd ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Tordesillas, A.; Pucilowski, S.; Tobin, S.; Kuhn, M.R.; Ando, E.; Viggiani, G.; Druckrey, A.; Alshibli, K. Shear bands as bottlenecks in force transmission. Eur. Phys. Lett. 2015, 110, 58005. [Google Scholar] [CrossRef] [Green Version]
- Dassault Systems. Abaqus 6.13 Using Abaqus Online Documentation. Available online: http://dsk.ippt.pan.pl/docs/abaqus/v6.13/pdf_books/HELP.pdf (accessed on 26 April 2019).
- Riveros, G.A.; Gopalaratnam, V.S. Fracture response of reinforced concrete deep beams finite element investigation of strength and beam size. Appl. Math. 2013, 4, 1568. [Google Scholar] [CrossRef]
- Riveros, G.A.; Gopalaratnam, V.S. Shear Response of Reinforced Concrete Deep Beam: Validating Fracture Mechanics Based Numerical Modelling with Experiments; American Concrete Institute: Farmington Hills, MI, USA, 2015. [Google Scholar]
- Segalman, D.J.; Fulcher, C.W.G.; Reese, G.M.; Field, R.V., Jr. An Efficient Method for Calculating RMS von Mises Stress in a Random Vibration Environment. J. Sound Vib. 1998, 230, 393–410. [Google Scholar] [CrossRef]
- Deang, J.; Horstemeyer, M.; Williams, L.; Perkins, E.; Allison, P.; Riveros, G. Paddlefish rostrum as a structure for bioinspiration: Analysis and modeling of the of the stress state and strain rate dependence behavior of cartilage. In Proceedings of the TMS Annual Meeting and Exhibition, Nashville, TN, USA, 14–18 February 2016. [Google Scholar]
- Allison, P.G.; Deang, J.F.; Diaz, A.J.; Poda, A.R.; Hoover, J.J.; Horstemeyer, M.F.; Perkins, E.J. Characterization of paddlefish (Polyodon spathula) rostrum stellate bones. Bioinspired Biomim. Nanobiomater. 2013, 3, 63–68. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Commercial Material | Elastic Modulus |
|---|---|---|
| Tissue | Vinyl ester epoxy | 2.9 GPa |
| Hard cartilage | Polyethylene fibers | 66 GPa |
| Soft cartilage | Polyethylene/epoxy(as isotropic) | 49,762 MPa |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patel, R.; Riveros, G.; Thompson, D.; Perkins, E.; Hoover, J.J.; Peters, J.; Tordesillas, A. A Transdisciplinary Approach for Analyzing Stress Flow Patterns in Biostructures. Math. Comput. Appl. 2019, 24, 47. https://0-doi-org.brum.beds.ac.uk/10.3390/mca24020047
Patel R, Riveros G, Thompson D, Perkins E, Hoover JJ, Peters J, Tordesillas A. A Transdisciplinary Approach for Analyzing Stress Flow Patterns in Biostructures. Mathematical and Computational Applications. 2019; 24(2):47. https://0-doi-org.brum.beds.ac.uk/10.3390/mca24020047
Chicago/Turabian StylePatel, Reena, Guillermo Riveros, David Thompson, Edward Perkins, Jan Jeffery Hoover, John Peters, and Antoinette Tordesillas. 2019. "A Transdisciplinary Approach for Analyzing Stress Flow Patterns in Biostructures" Mathematical and Computational Applications 24, no. 2: 47. https://0-doi-org.brum.beds.ac.uk/10.3390/mca24020047