1. Introduction
The usage of self-powered electronics is increasing because of robustness in the design [
1]. The advancement in technology specifically in Internet of Things (IoT) applications has resulted in a tremendous need for self-powered wireless sensors. As batteries are heavy and are expensive to maintain, and limited in capacity and life, there is therefore a need for mechanisms that can power the nano or microelectronics by absorbing structural energy [
2]. The field of energy harvesting is of great interest for researchers with applications in aerospace industry [
3]. There are many mechanisms for energy transformation i.e., electromagnetic [
4], electromechanical [
5,
6], and fluid-structure interaction systems [
7]. Among these mechanisms, fluid-structure interaction (FSI) systems play a vital role because of its voltage-dependent actuation [
8,
9,
10]. Many researchers are working on such techniques to drive electronic circuits in electromechanical systems [
11,
12]. The piezoelectric material is mostly used to harvest electrical energy by absorbing mechanical energy (mechanical vibrations) from the surrounding [
13,
14].
The flapping flag instability in an inviscid steady axial flow is a classical problem of FSI [
15]. Presently, the comprehension of this phenomenon is important for many applications such as paper processing [
16], snoring [
17], energy harvesting [
18] and turbulence reduction [
19]. In nature, many applications of flapping flag can be observed i.e., swimming of the fish [
20]. In recent decades, this interaction mechanism between oscillating structures and fluid flows has become of particular importance [
21]. At first, the flag-flutter phenomenon has been addressed by Rayleigh [
15] from a theoretical point of view. He suggested that an elastic plate of infinite dimensions is always unstable when immersed in the axial potential flow. More recently Argentina et al. [
22] studied the response of cantilevered plate in axial flow by considering the linear beam model based on classical Theodorsen’s theory. This model was designed to analyze the effect of boundary conditions as well as the investigation of the flapping plate sound prediction [
23]. Alben et al. [
24] presented a linearized model for this interaction phenomenon by considering a vortex sheet coupled to a flag of finite-length. This model represented that by reducing the rigidity of the plate, the high spatial-frequency modes tends to become unstable, leading to the increase in complexity of the non-linear dynamics. A full non-linear model was presented by Michelin et al. [
25], in which the continuous vortex sheet shed by the flexible flag is replaced by the shedding of discrete point vortices with unsteady strengths. Other numerical models include the viscosity of fluid such as using Immersed Boundary Method (IBM) [
26] applied to the problem of flapping plates [
27]. Masoud et al. [
28] use another hybrid computational approach that integrates the Lattice Boltzmann Model (LBM) for the dynamics of incompressible viscous fluids and the Lattice Spring Model (LSM) for the mechanics of elastic solids.
From the experimental point of view, flag-flutter was first explored by Taneda et al. [
29]. They studied flags made of various materials and shapes in a wind tunnel induced to axial flow and their results provided a base for future exploration in this field. Taneda’s work seems to be the only systematic study in this field until the experiments on an elastic filament flapping in a flowing soap film [
30] and on paper sheets flapping in a breeze [
16]. These experiments were used to elucidate other aspects of the phenomena such as the bi-stability of the flapping and stationary states, and characterization of the transition curve. Moreover, Watanabe et al. [
16] coupled their structural model with a two-dimensional compressible Navier-Stokes solver. Tang et al. [
31] used a nonlinear structural model with not-extendibility to study cantilevered plates in axial flow. They used a Vortex Lattice Model (VLM) to calculate the aerodynamic lift over the plate. Tang et al. [
32] and Doare et al. [
33] used a nonlinear equation of motion of the plate using the non-extendibility condition and an unsteady lumped vortex model to calculate the pressure difference across the plate and both the instability and the post-critical behavior of the system were studied. While these works remain as studies of the fundamentals of this natural phenomenon, fluid-induced flapping has found applications in energy harvesting in recent years. The energy harvested from the flutter of a plate in an axial flow by making use of piezoelectric materials was demonstrated by Doare et al. [
33], who derived the equations for fully coupled linear dynamics of the fluid-solid and electrical systems.
For a flag-flutter-based energy harvesting, phenomenon of flutter plays a critical role [
34]. Many researchers showed their interest towards PZT transduction-based FSI system [
35,
36]. The parametric distributed model from a cantilever beam for energy harvesting via electromechanical mechanism is presented by Elvin et al. [
37]. The classical aeroelastic model for the small angle of attack is presented by Theodorsen’s, which is based on flutter [
38], while Beran et al. presented the aeroelastic model for the large angle of attack by adding quasi-steady approximation [
39]. Muturi et al. presented that the amplitude of LCOs remains steady for the nonlinear aeroelastic system if they are initially excited over the critical value [
40]. Elahi et al. carried out a study to stress on the true prediction of aerodynamic model, as the evaluation of the performance of PZT aeroelastic energy harvester (PAEH) is dependent on it [
41].
By using PZT material for energy harvesting based on flag-flutter, in-depth dynamic details of FSI-based flag-flutter are needed. The aeroelastic instability of a flag in a potential flow has been explored both numerically and experimentally in this paper. In particular, the study is conducted by using different numerical models with increasing complexity. The numerical model allows a first evaluation of how different parameters can influence the stability of the flag, namely, the unperturbed state. The nature of the observed bifurcation is studied experimentally in subsonic wind-tunnel. Finally, an experimental study is conducted and the results are compared with the numerical one. The main observed feature of the studied bifurcation process is a hysteresis phenomenon, which suggests the presence of a sub-critical bifurcation. The main contribution of the present paper is to present an analysis of a flag-flutter phenomenon both in terms of stability margin parameters (flutter flow speed, frequencies, and characteristic geometrical parameters) and critical aeroelastic mode shapes; via numerical and experimental campaign. The comparison of power generated by various PAEHs based on flutter mechanism is represented in
Table 1.
This research work is the advancement of the work by Eugeni et al. [
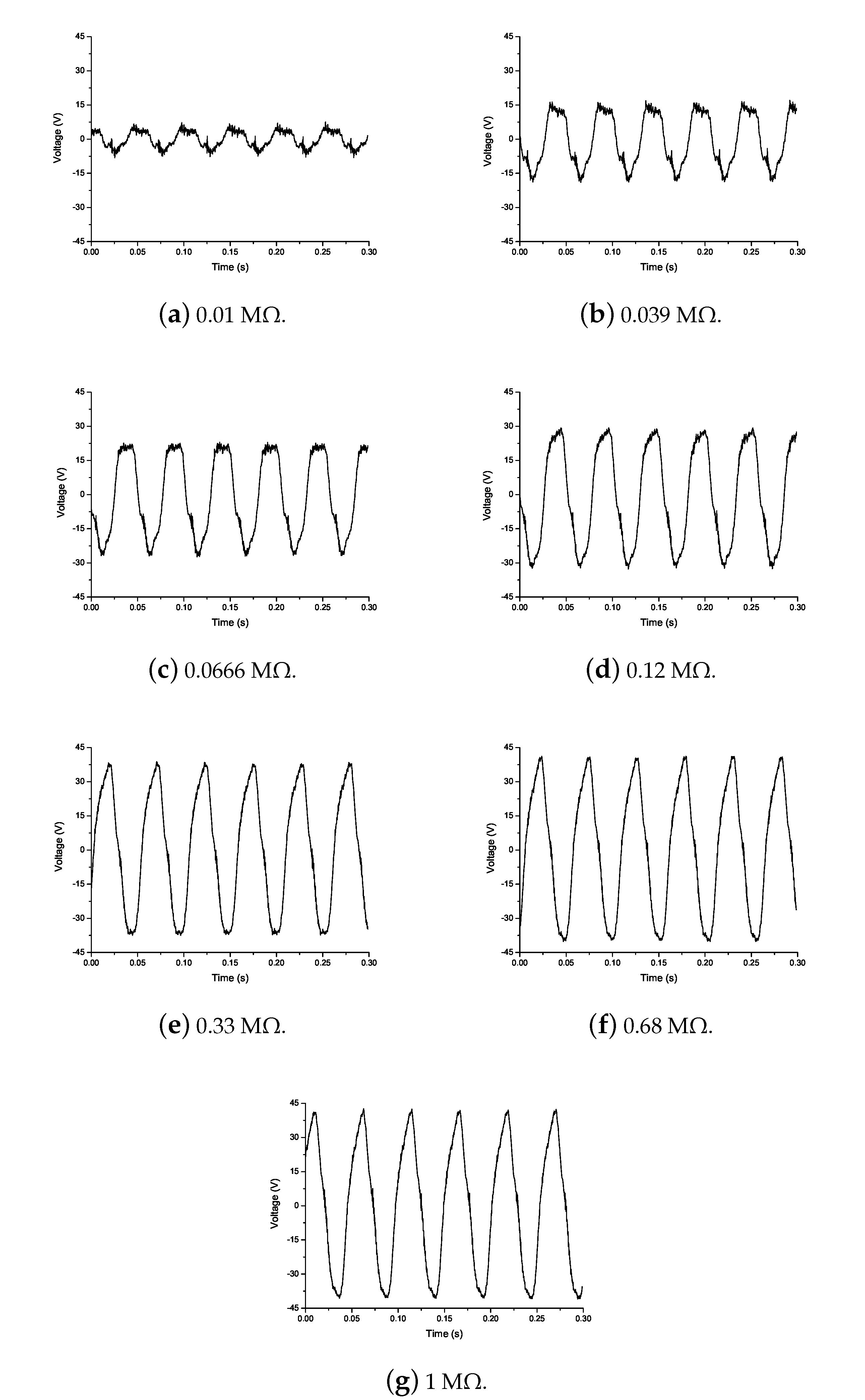
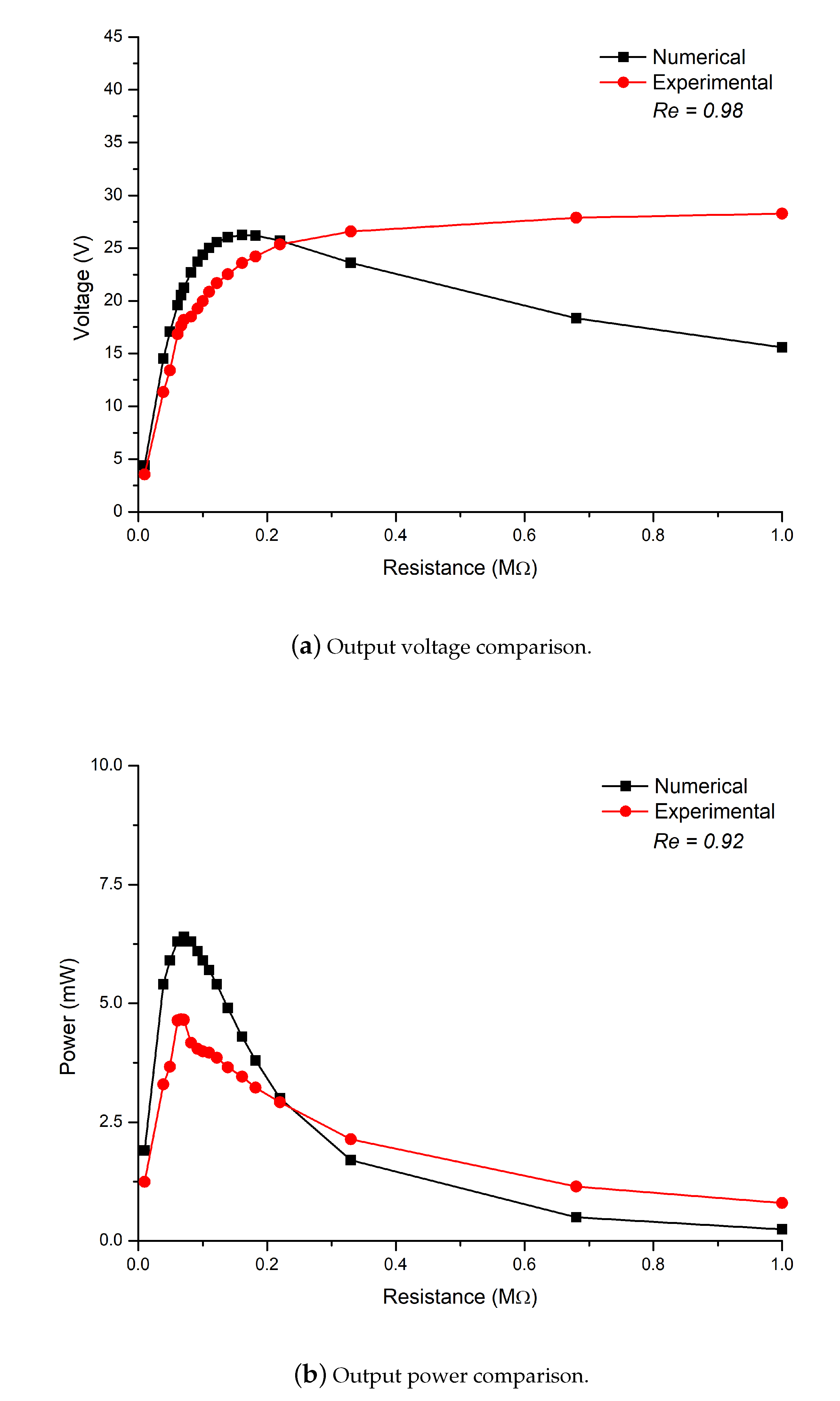
42]. The current manuscript explains all the results of the numerical and experimental campaign carried out. The scientific novel contribution of this manuscript is extensive experimentation validated with numerical simulations for flutter mode vibrations. In this research, energy harvesting results are discussed both numerically and experimentally at variable resistance ranging from 0.01 M
to 1 M
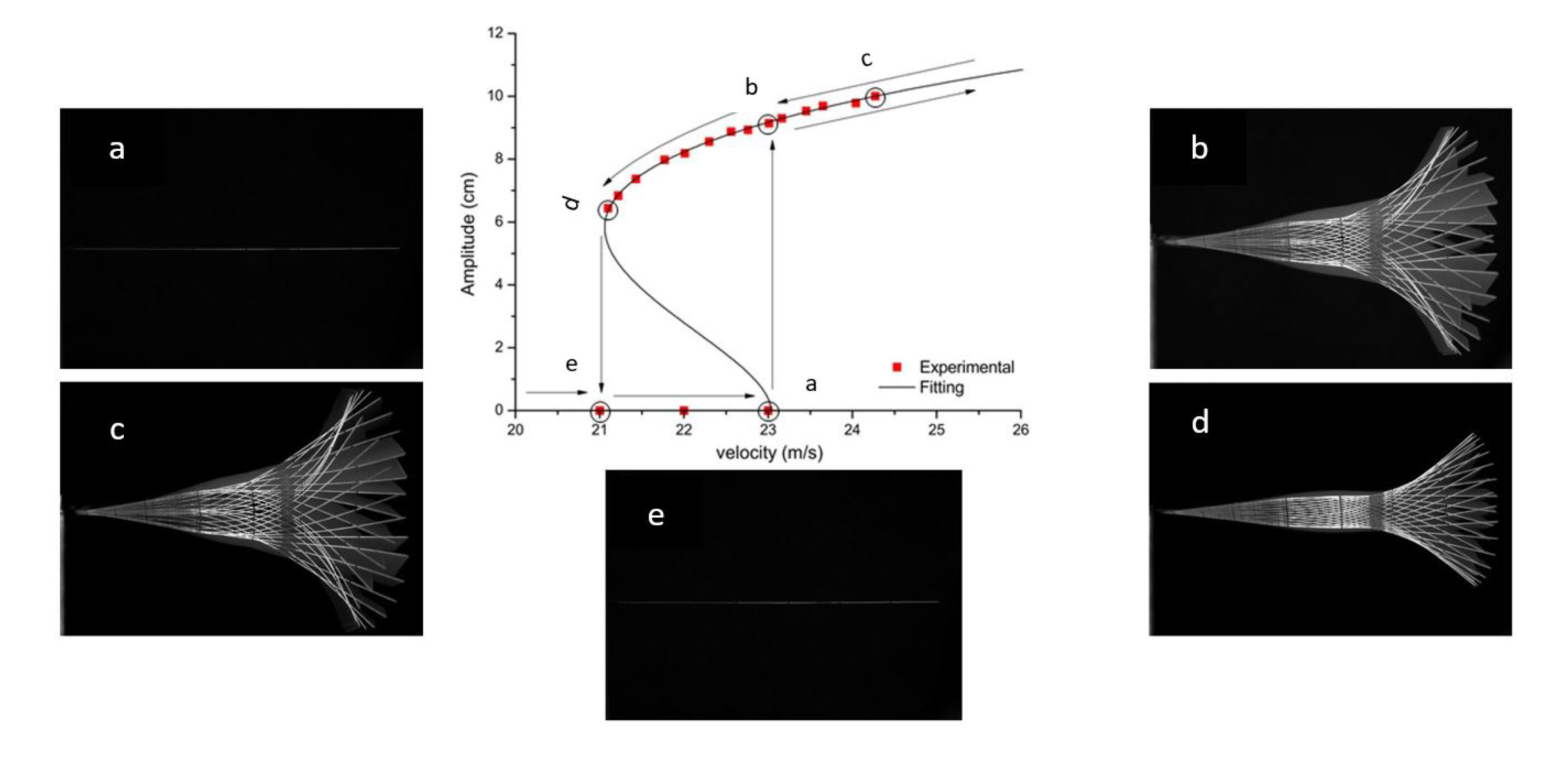
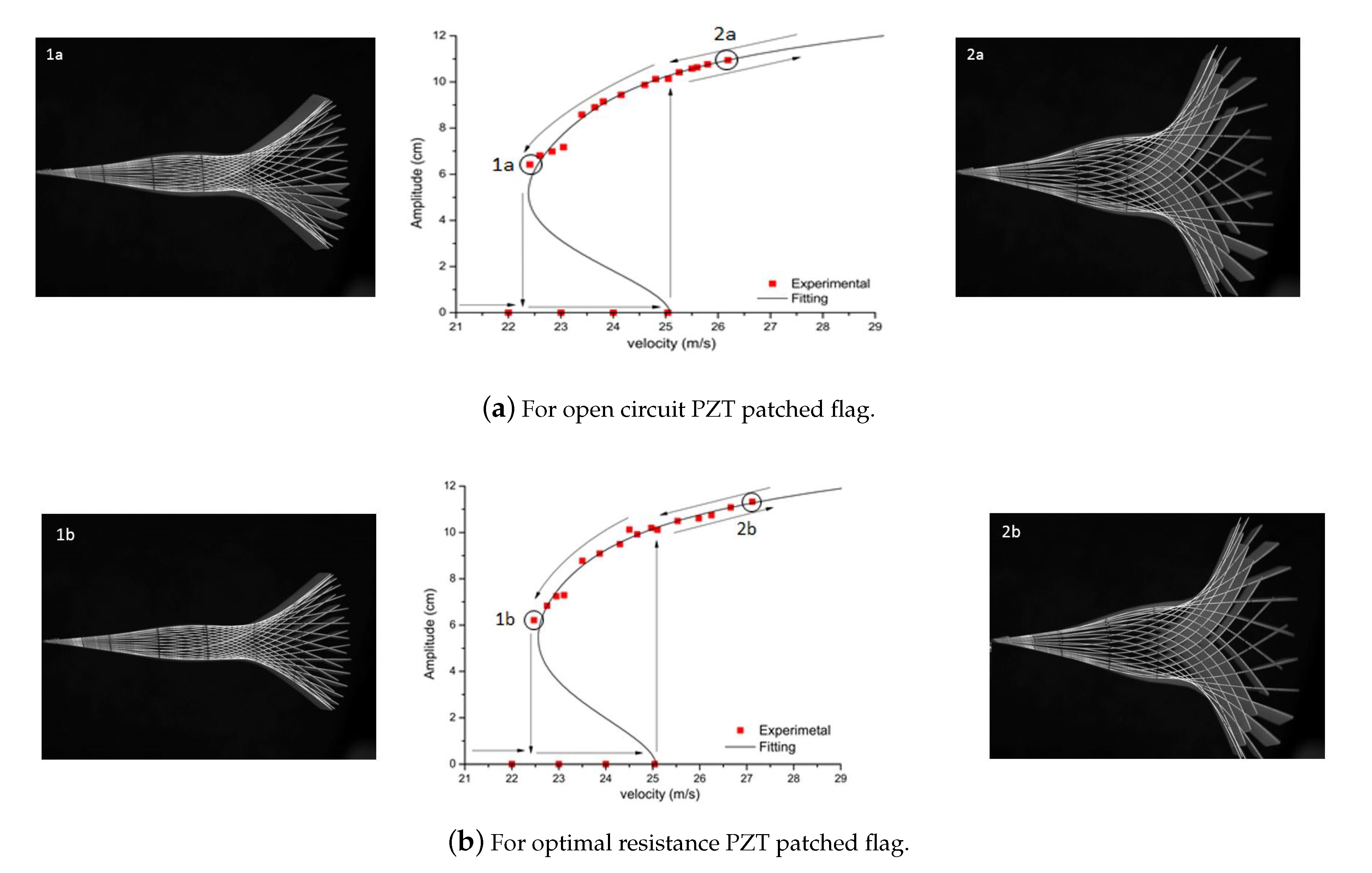
. The evolution of generated voltage is also represented for different resistances. Moreover, the optimal resistance is predicted experimentally for maximizing the energy harvesting phenomenon. In the experimental campaign, the bifurcation diagrams are observed with Photron FASTCAM AX200 (Tokyo, Japan) to understand the modification of the flutter-mode vibration with the flow velocity along the observed bifurcation LCOs diagrams experimentally evaluated (PZT and Al patch attached). This evaluation is critical for the harvester performance because the bending mode is the most important for the energy harvesting maximization. The designed PZT energy harvester via flag-flutter mechanism is suitable for energy harvesting in aerospace engineering applications i.e., in high altitude platforms, stratospheric probe balloons, and unmanned aerial vehicles.
The paper is organized as follows: in
Section 2, the numerical model is elaborated; in
Section 3, the experimental set-up is discussed; in
Section 4, results are presented and are compared with the experimental and numerical predictions. Finally, in
Section 5 concluding remarks are given.
2. Numerical Model
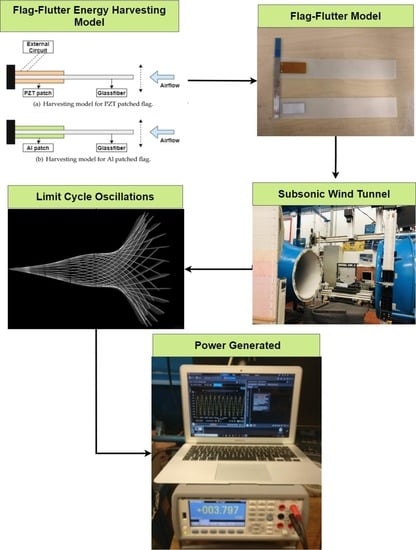
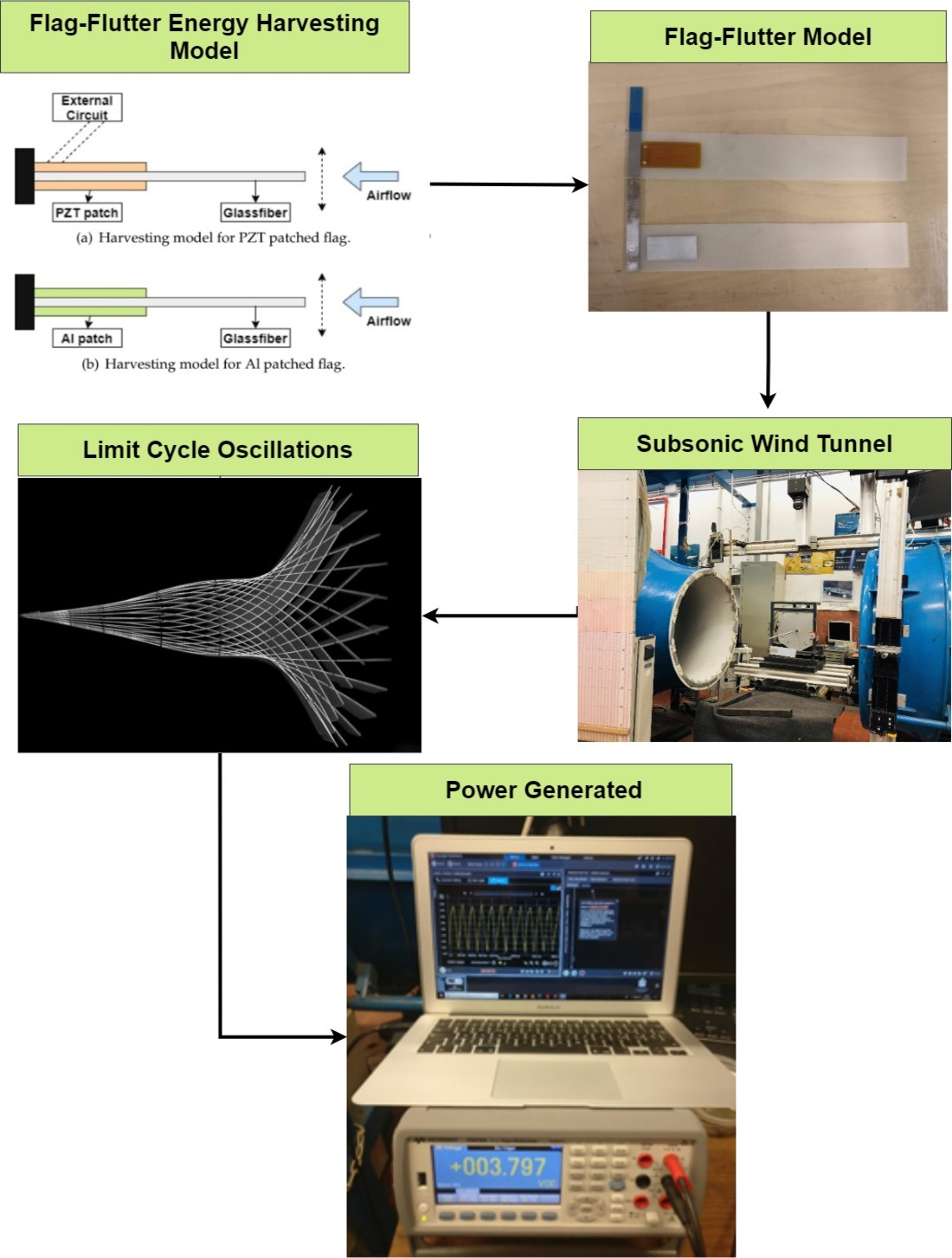
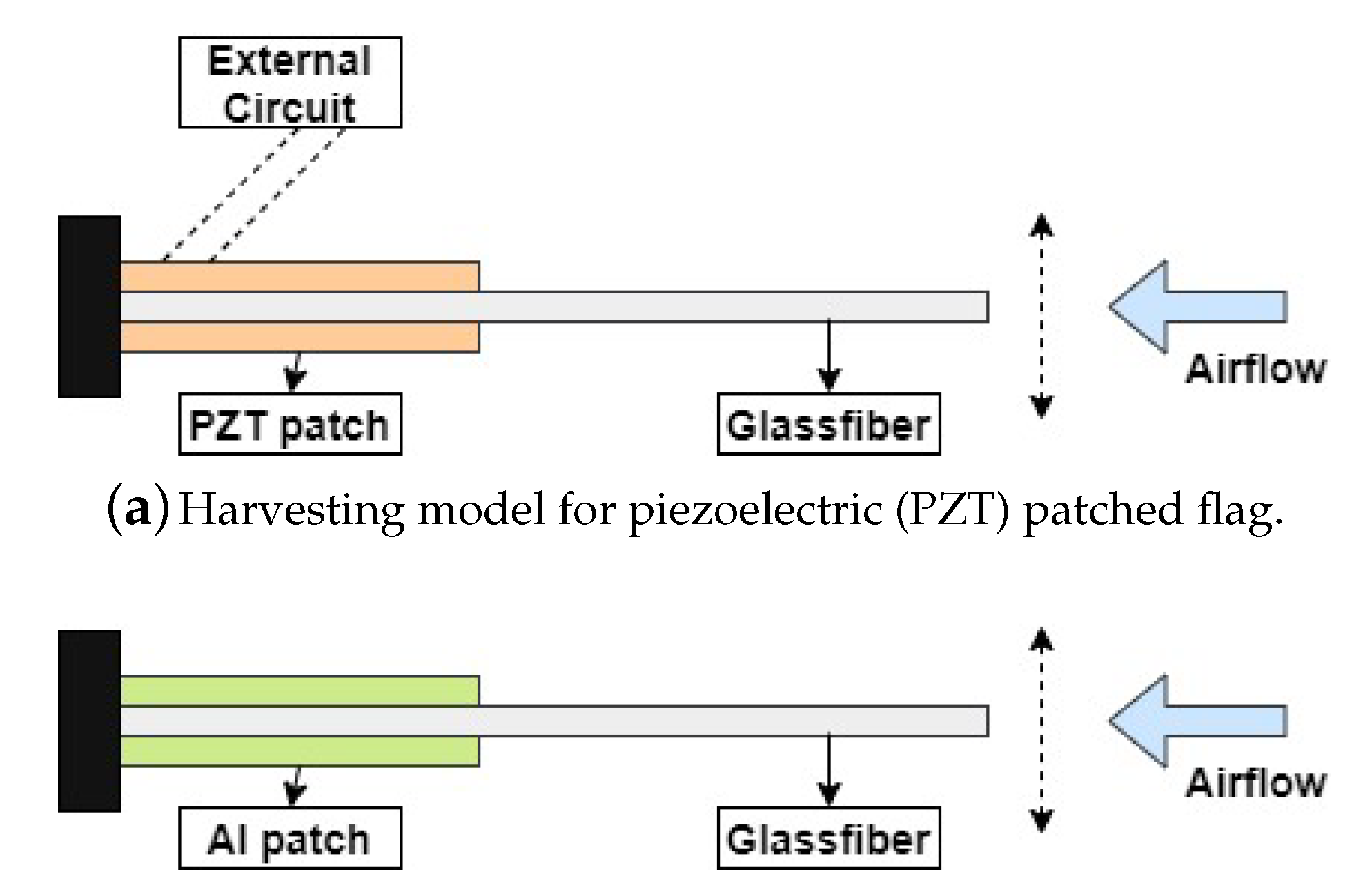
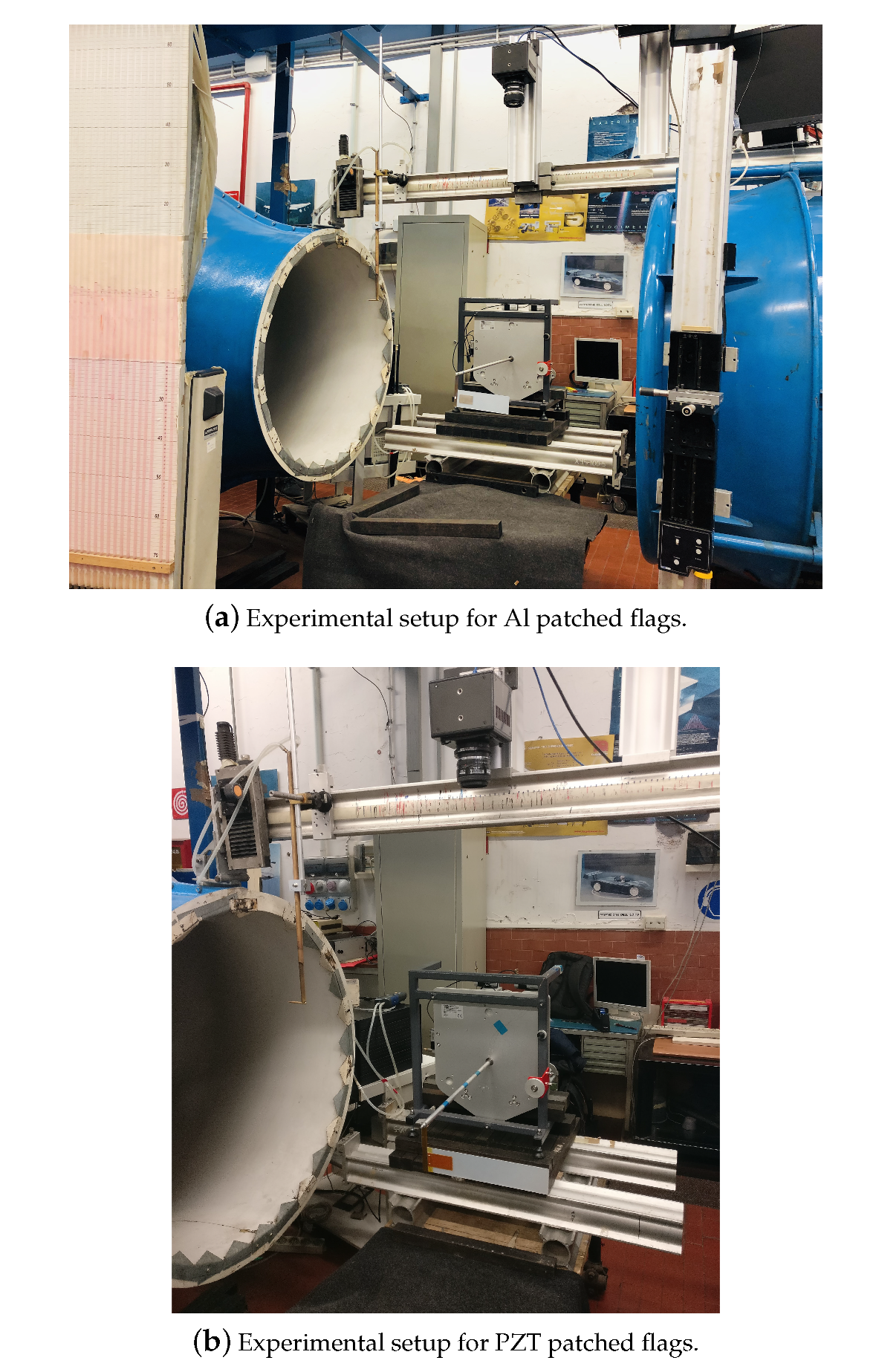
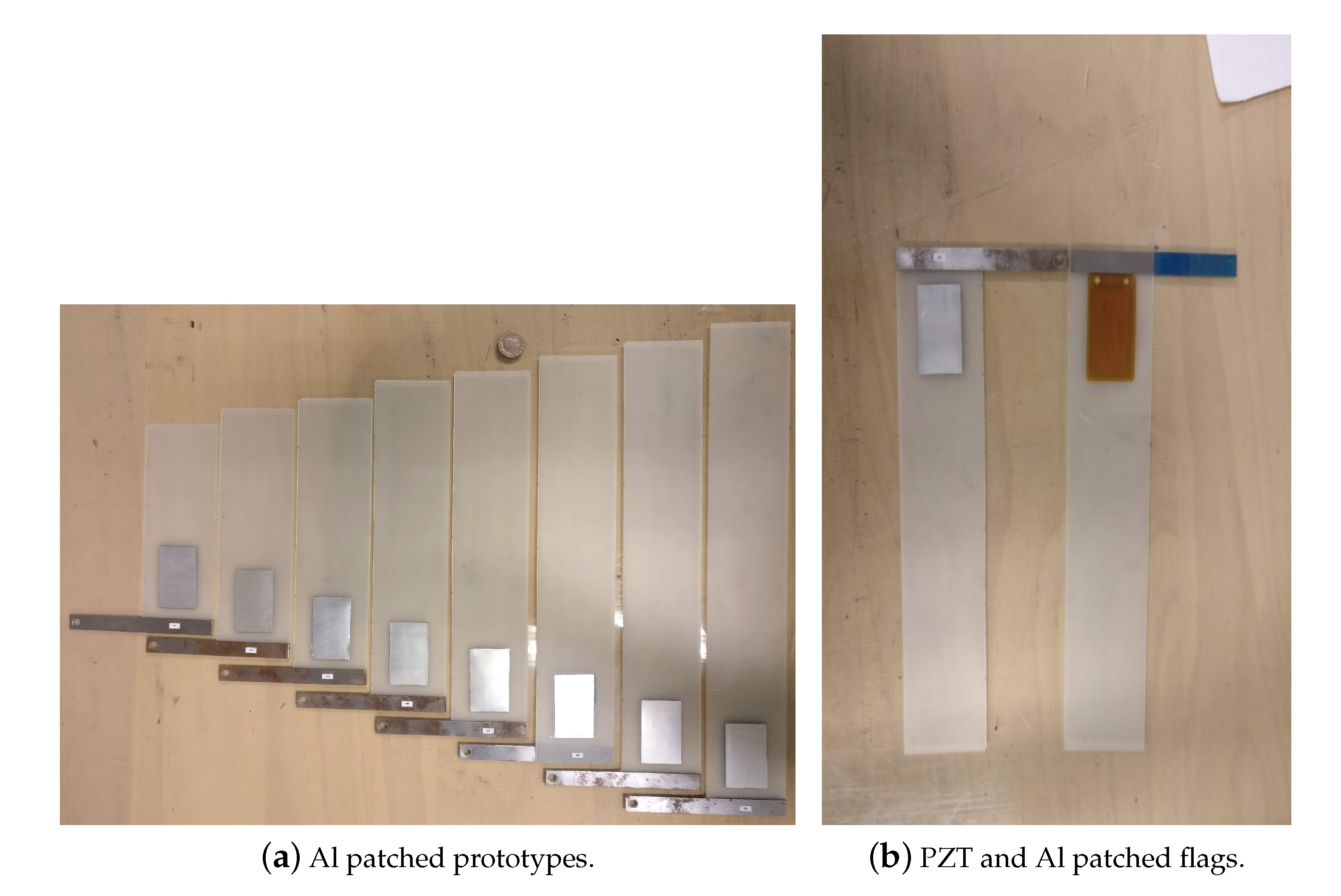
In this paper, the PEH is based on the flag-flutter mechanism in which the harvester is considered to be a fiberglass plate as shown in
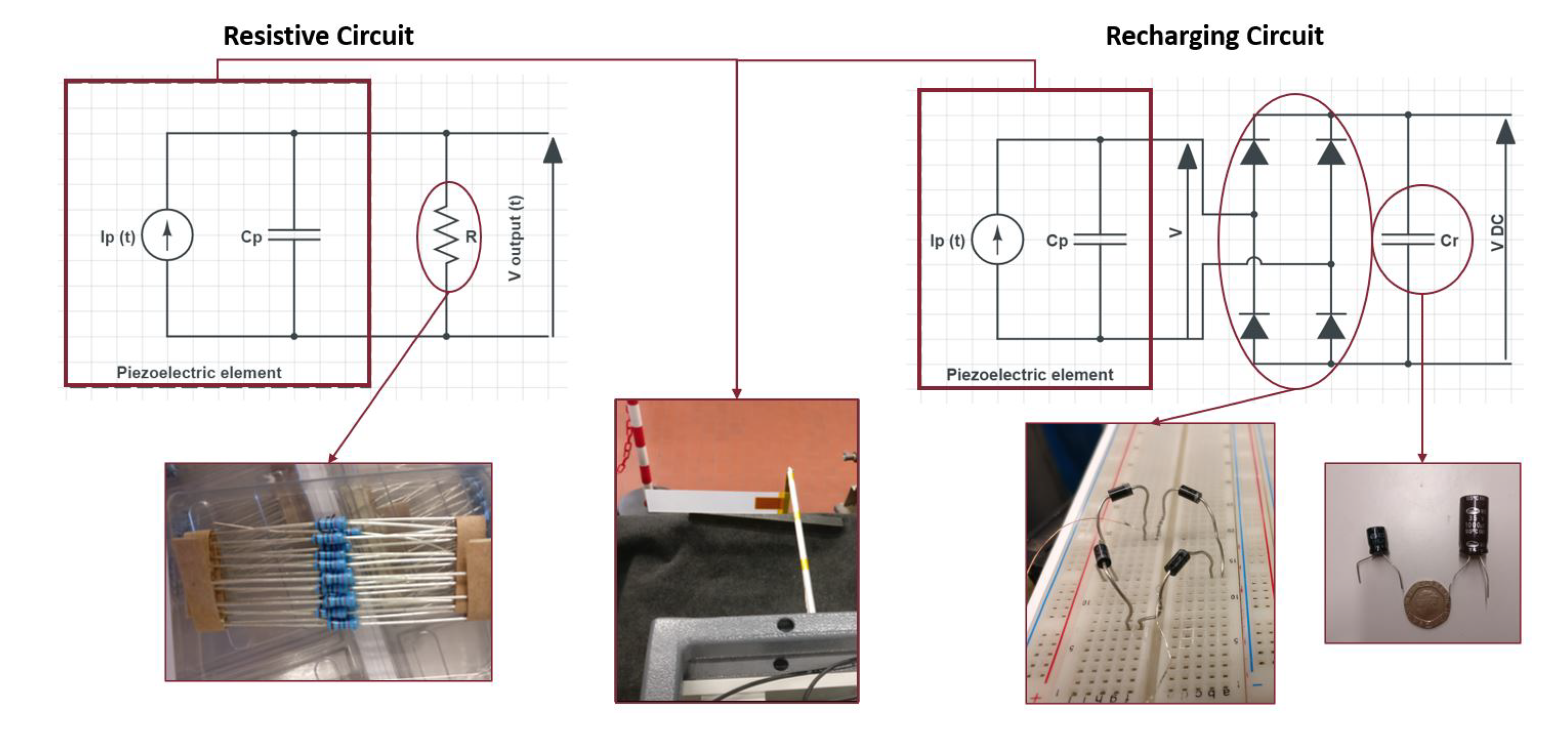
Figure 1. For energy harvesting purposes, the bimorph configuration of PIC 255 (PZT material) is attached to the host structure provided with electronic circuits as shown in
Figure 1a. For the validation of the designed energy harvesting model, another model is constructed. In this model, the same strategy is used as of PZT attached harvester except for two Aluminium (Al) patches without external circuits, which are attached to the fixed end of the host structure as shown in
Figure 1b. These designed harvesters experience the airflow, resulting in LCOs, the PZT patches absorbs the flow-induced structural vibrations and transform them into useful electrical energy. The overall mechanism of PZT energy harvesting by the flag-flutter mechanism is shown in
Figure 1. The geometry of the harvester is represented in
Table 2 and the material properties of the harvester are shown in
Table 3.
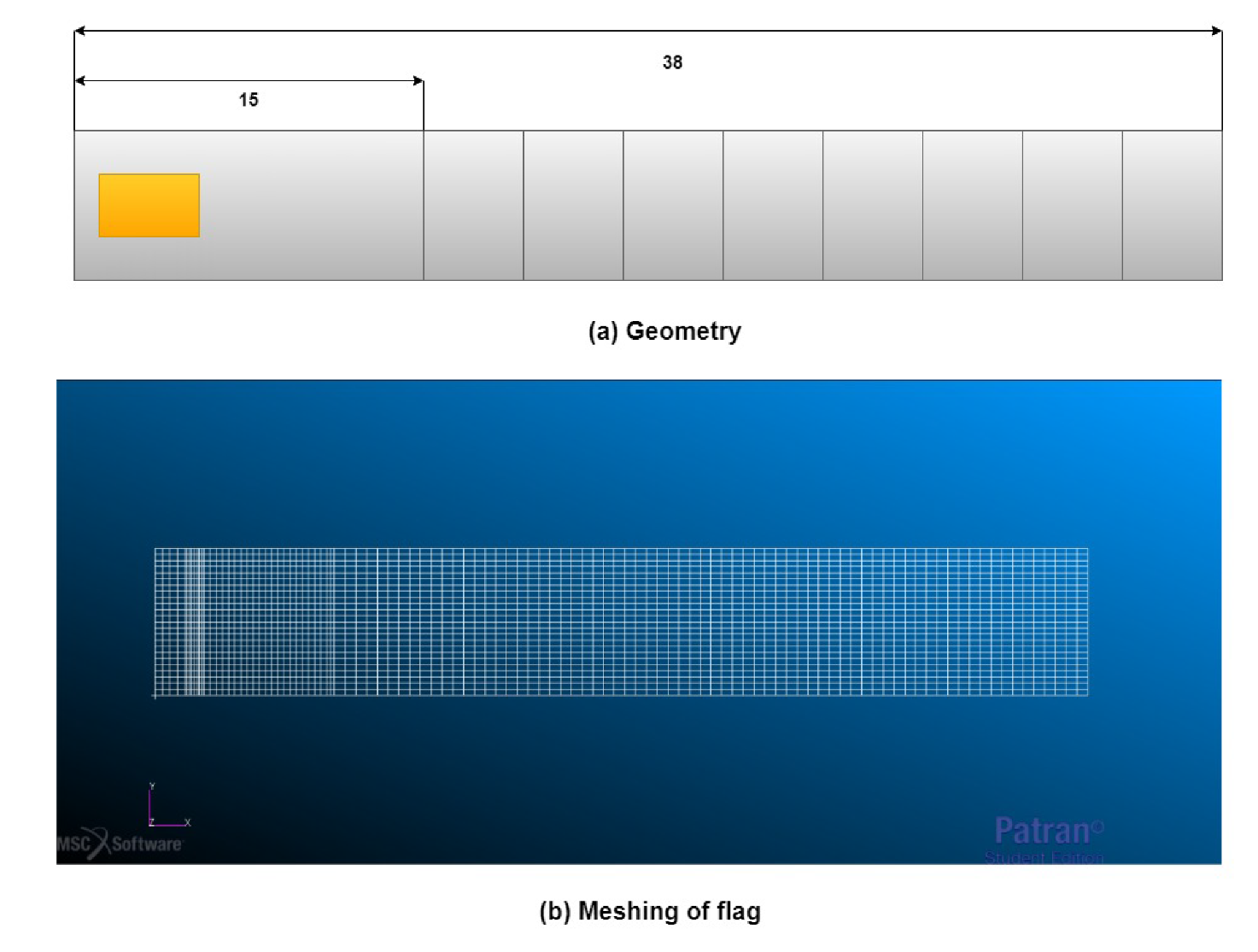
For numerical simulations, MSC Nastran software SOL 145 (2017, MSC Software, Newport Beach, CA, USA) is used for understanding the phenomenon of energy harvesting by the flag-flutter mechanism. The overall numerical model of the flag is represented in
Figure 2. To have an in-depth knowledge of the harvesting mechanism, the modeled flags were of different lengths and configurations as represented in
Figure 2a. The dimensions of the flag and PZT element is represented in
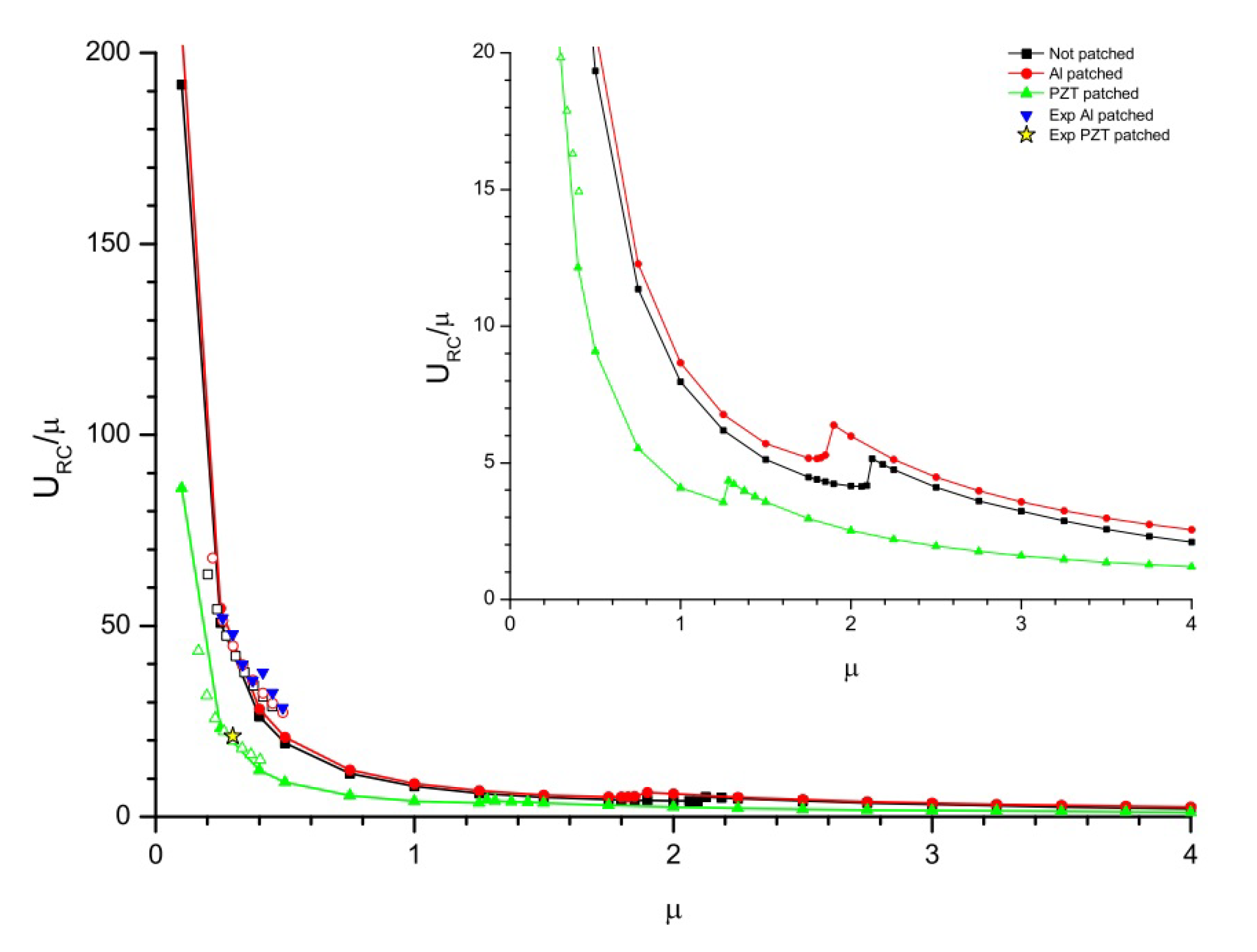
Table 2. Three different configurations of the numerical model are constructed in this phase; (i) flag with Al patch attached, (ii) flag with no patch attached, and (iii) flag with PZT patch attached. These configurations are realized to predict the optimal output power and exploring of a wide range of airflow velocity for the flutter analysis.
The flag is considered to be cantilevered to duplicate the experimental conditions (carried out in subsonic wind tunnel). In particular, flags were discretized recurring to 2D rectangular planar bending elements. This was implemented in MSC Patran recurring to shell elements which are associated with CQUAD4s elements. Which defines isoparametric quadrilateral plate elements. Mesh was realised so that the displacement, in the connection and material changes area, could be well described with particular focus to the piezoelectric area. This required a thicker mesh in piezoelectric patch area, other parts of the flag were meshed in the way that the flutter motion is well described. Load conditions are adjusted in MSC Nastran input file, for this type of analysis the solver couples flow and structure, calculating for each value of the velocity interval.
The Doublet Lattice Method (DLM) is used for aeroelastic analysis. For the unsteady flow, the DLM is an extension of the steady vortex-lattice method (VLM) to unsteady flow. To analyze flow-induced structural vibrations, the solver couples the structure and flow, for every interval value of airflow velocity. The unknown lifting pressures are assumed to be concentrated uniformly across the one-quarter chord line of each aerodynamic panel as described in the modelling part as shown in
Figure 2b. The total number of nodes and elements in the meshing of the flag during the numerical analysis is 1765 (17 cm) to 2625 (38 cm) and 1344 (17 cm) to 2496 (38 cm) respectively. The number of nodes and elements used in meshing during the numerical analysis are represented in
Table 4.
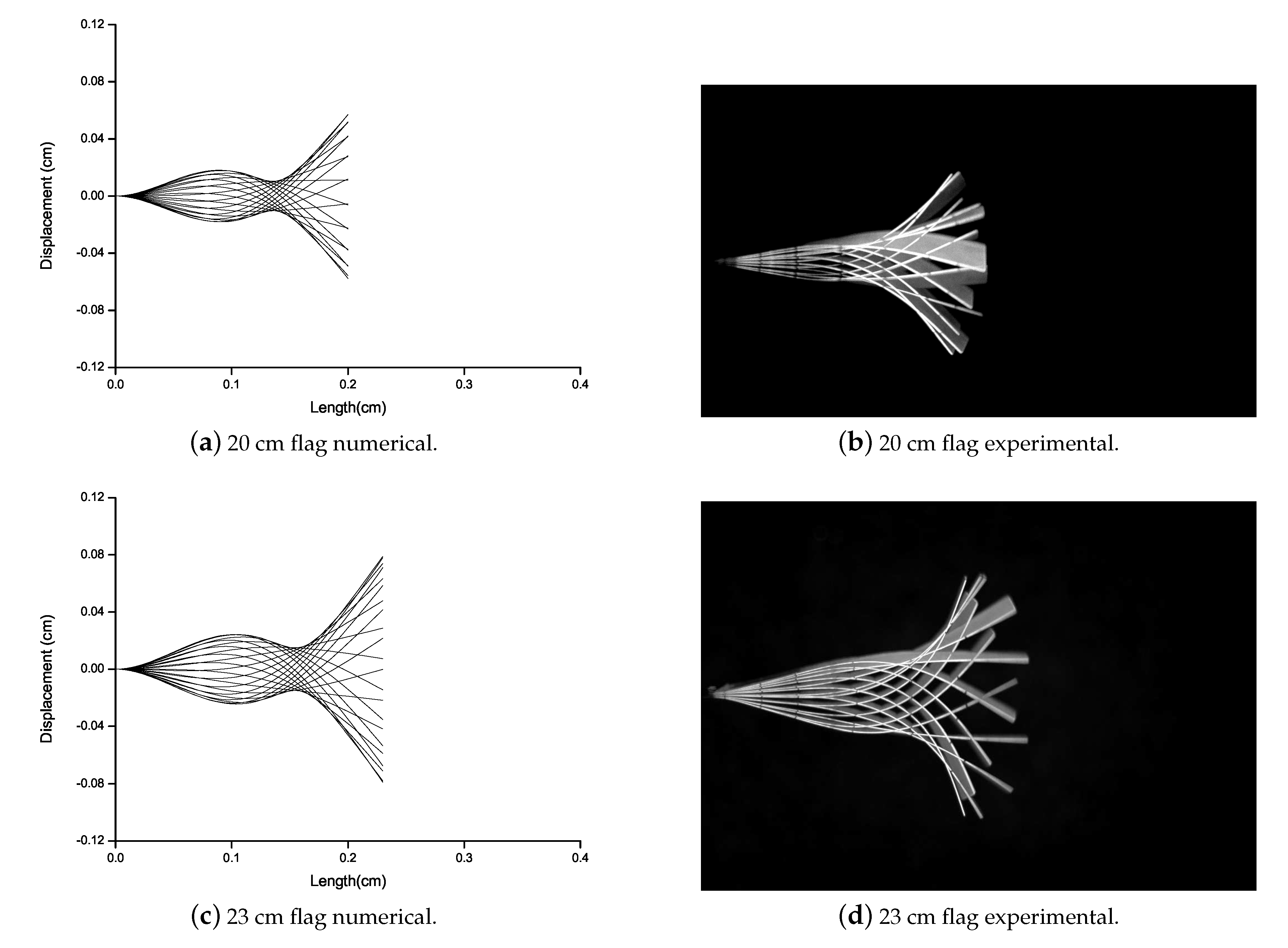
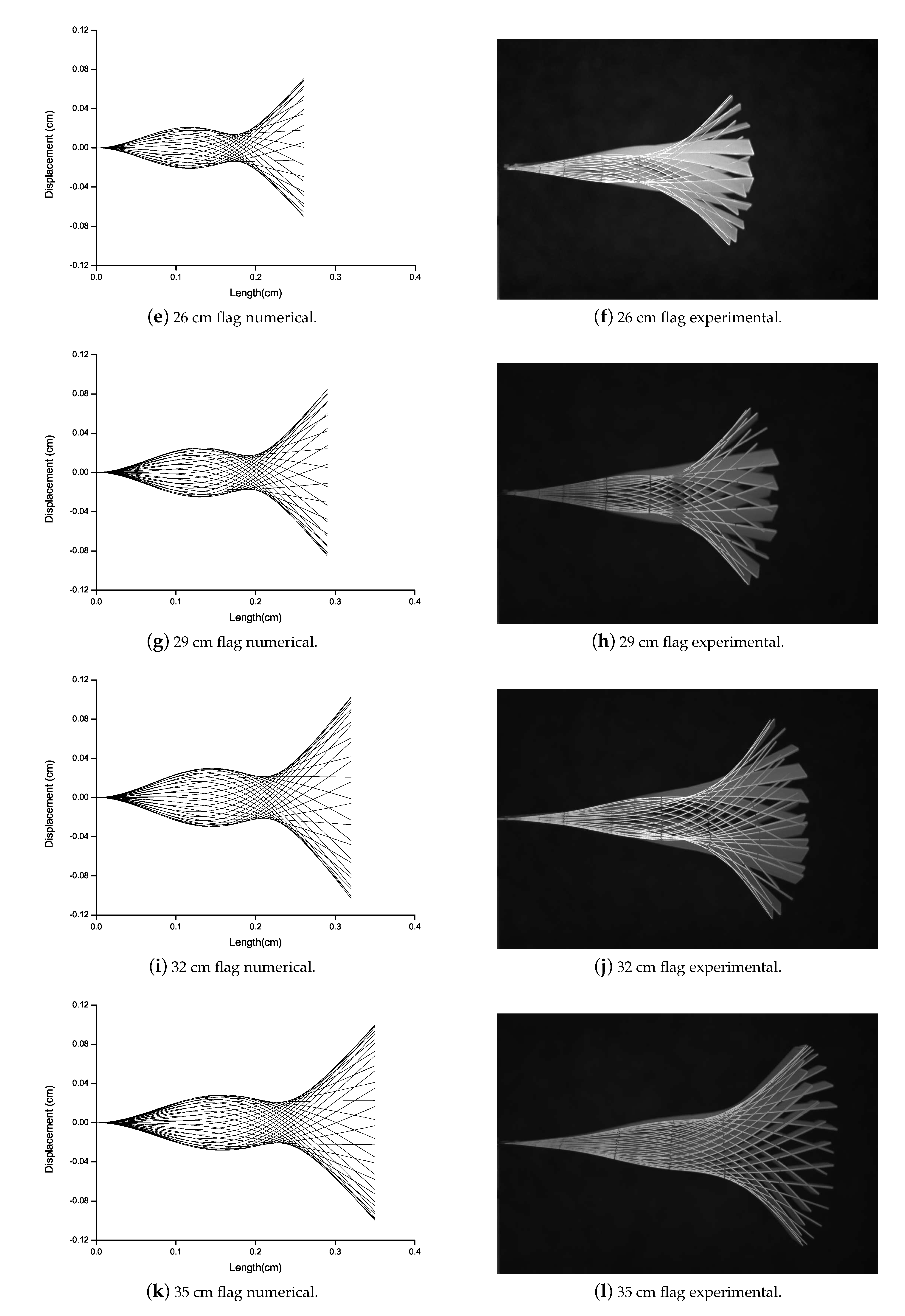
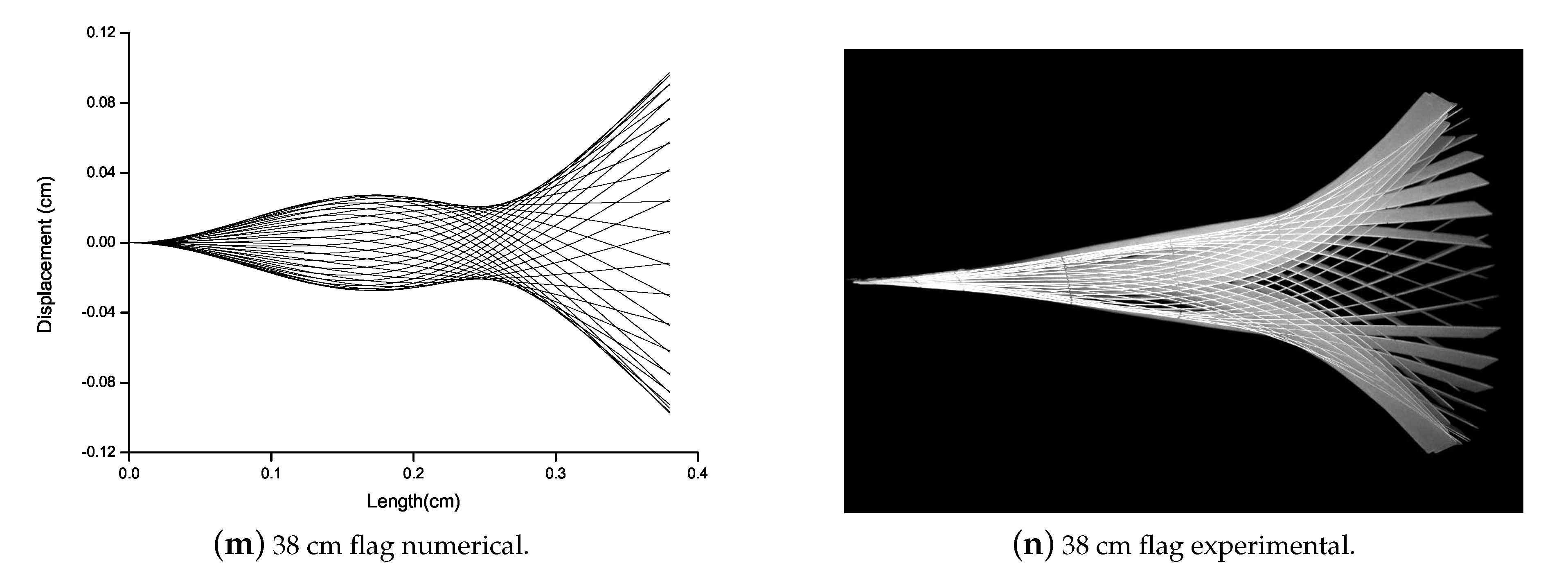
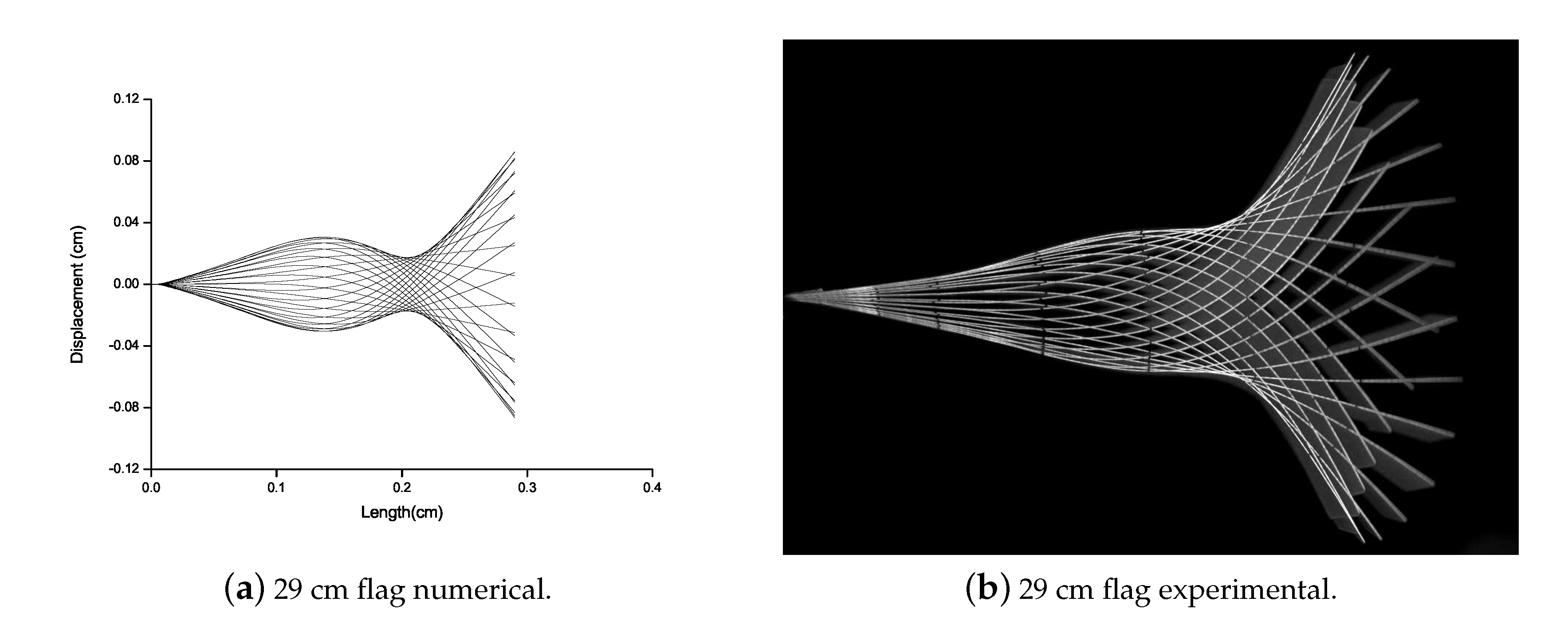
For the energy harvesting mechanism, the prediction of the optimal length of the flag is a crucial element. Elahi et al. elaborated that for the working model of the PZT element, the voltage generated is directly proportional to the curvature of the flag [
35]. It is evident from the research carried out by Eugeni et al. that a 29 cm flag is most optimized for energy harvesting mechanism via PZT transduction [
42]. Therefore, a 29 cm length of the flag is selected for experiments.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}