
A Novel Method for Estimating and Balancing the Second Harmonic Error of Cylindrical Fused Silica Resonators

Abstract
:1. Introduction
2. The Influence of the Unbalanced Mass on Quality Factor
3. Theory and Simulation Aspects of the Second Harmonic Error on Frequency Split
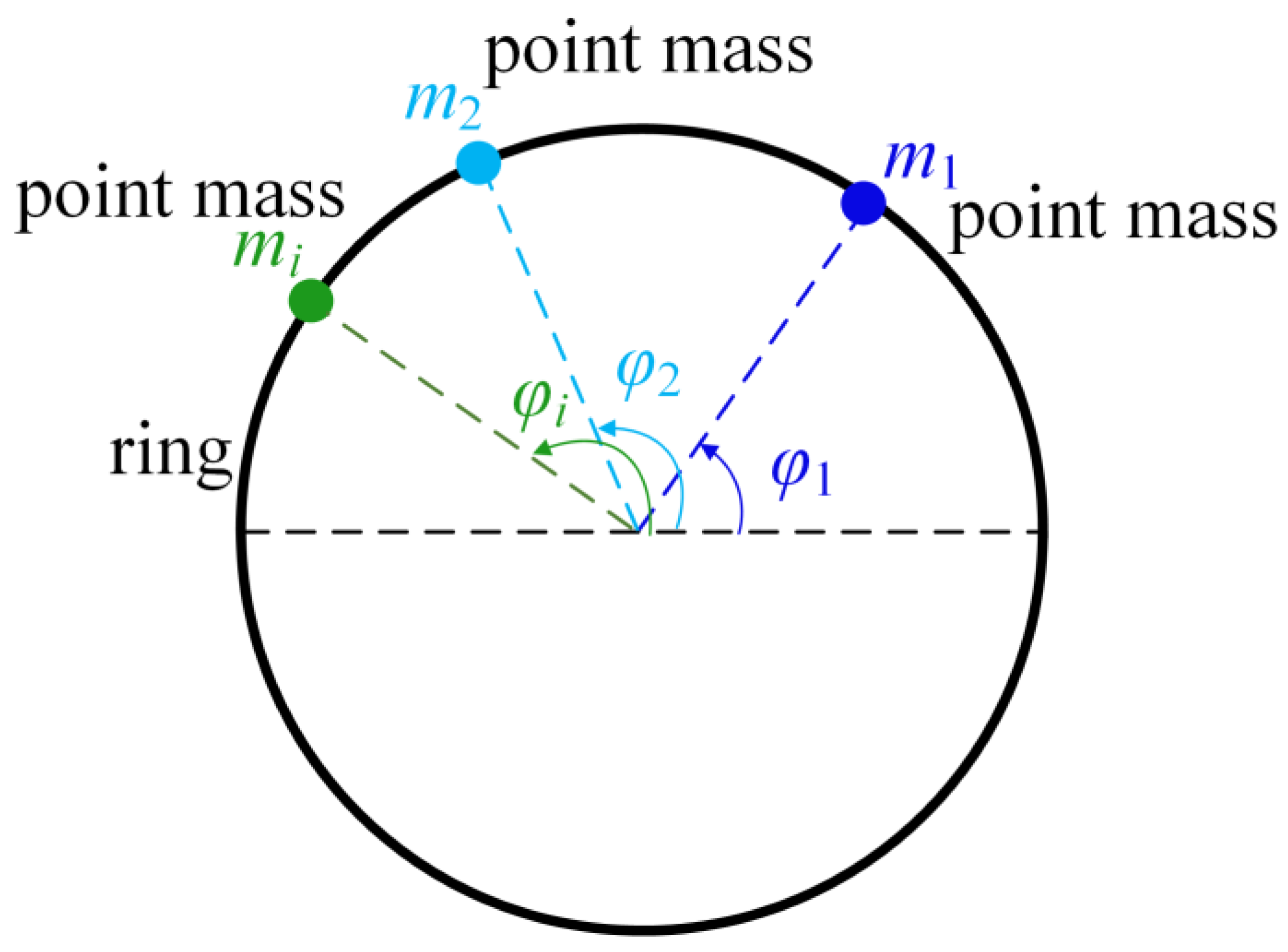
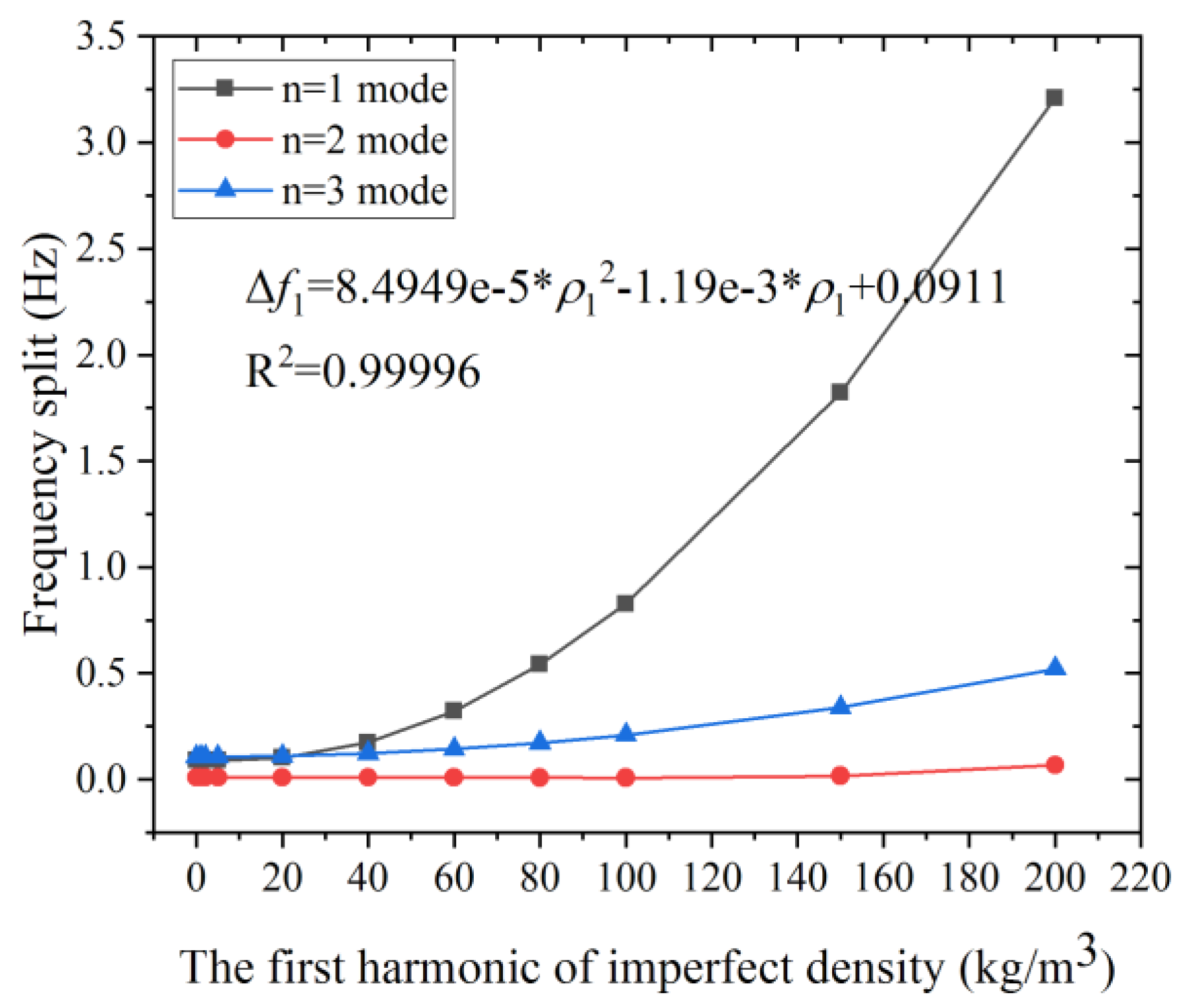
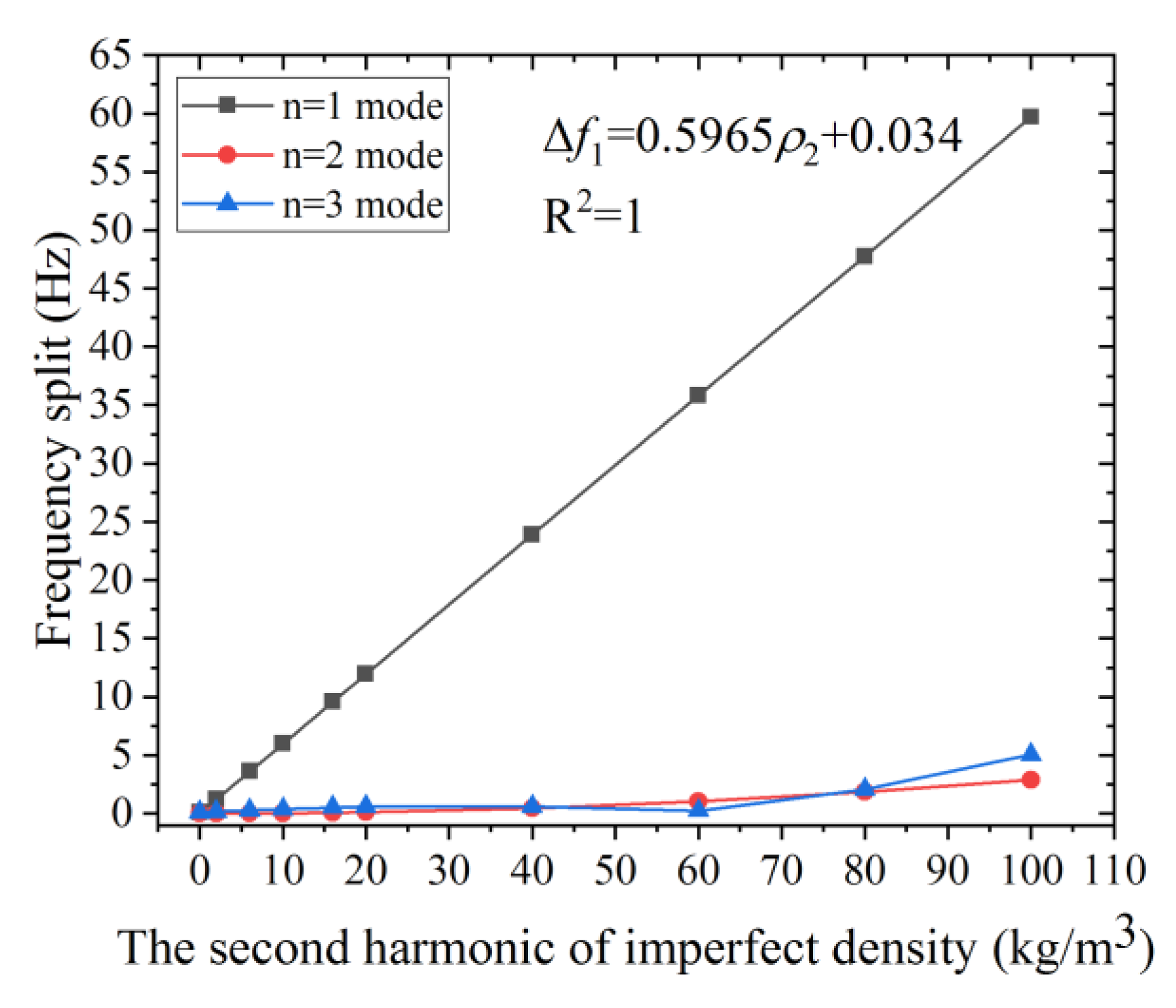
3.1. Relationship between the Second Harmonic Error and the Frequency Spilt of the n = 1 Mode
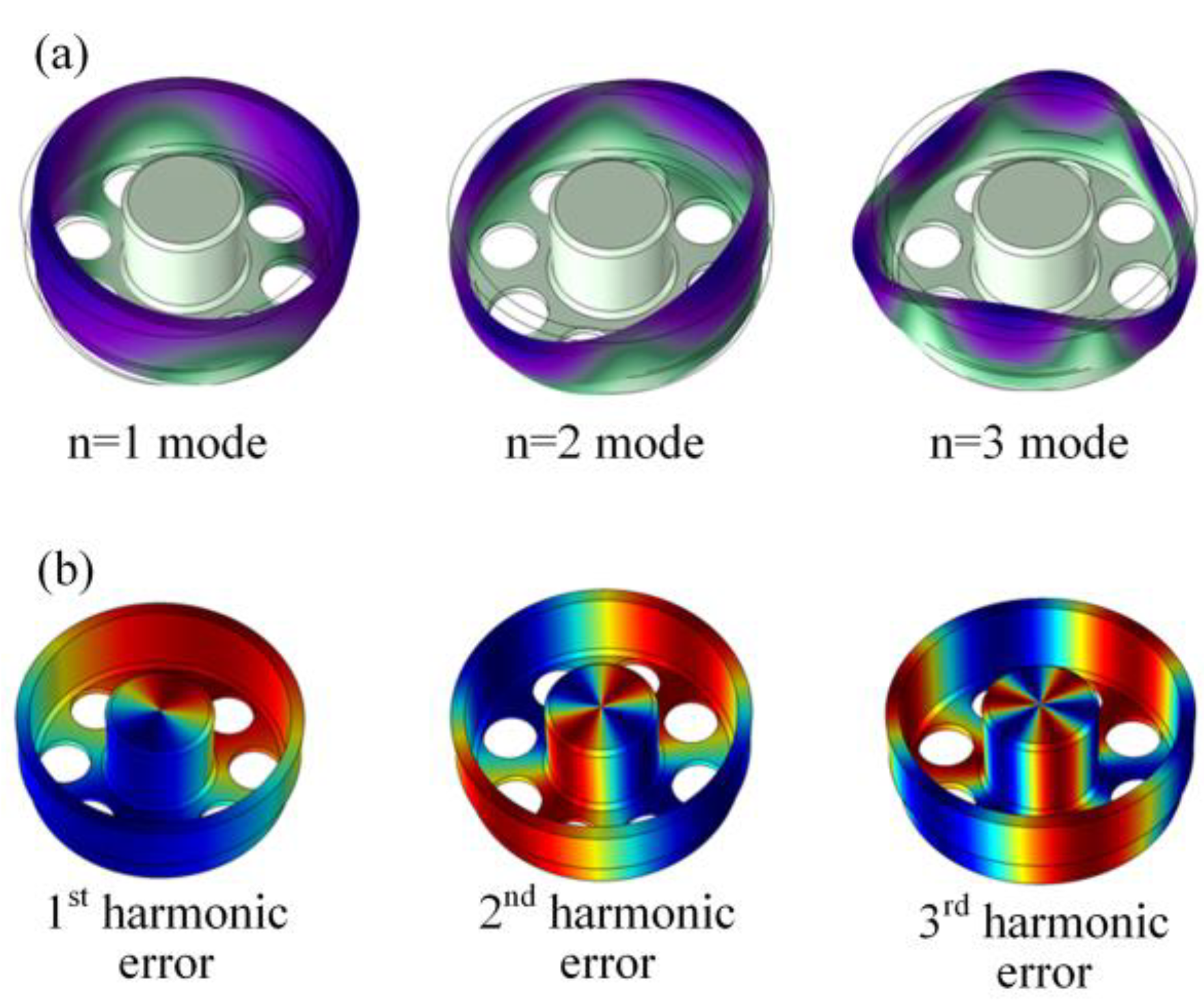
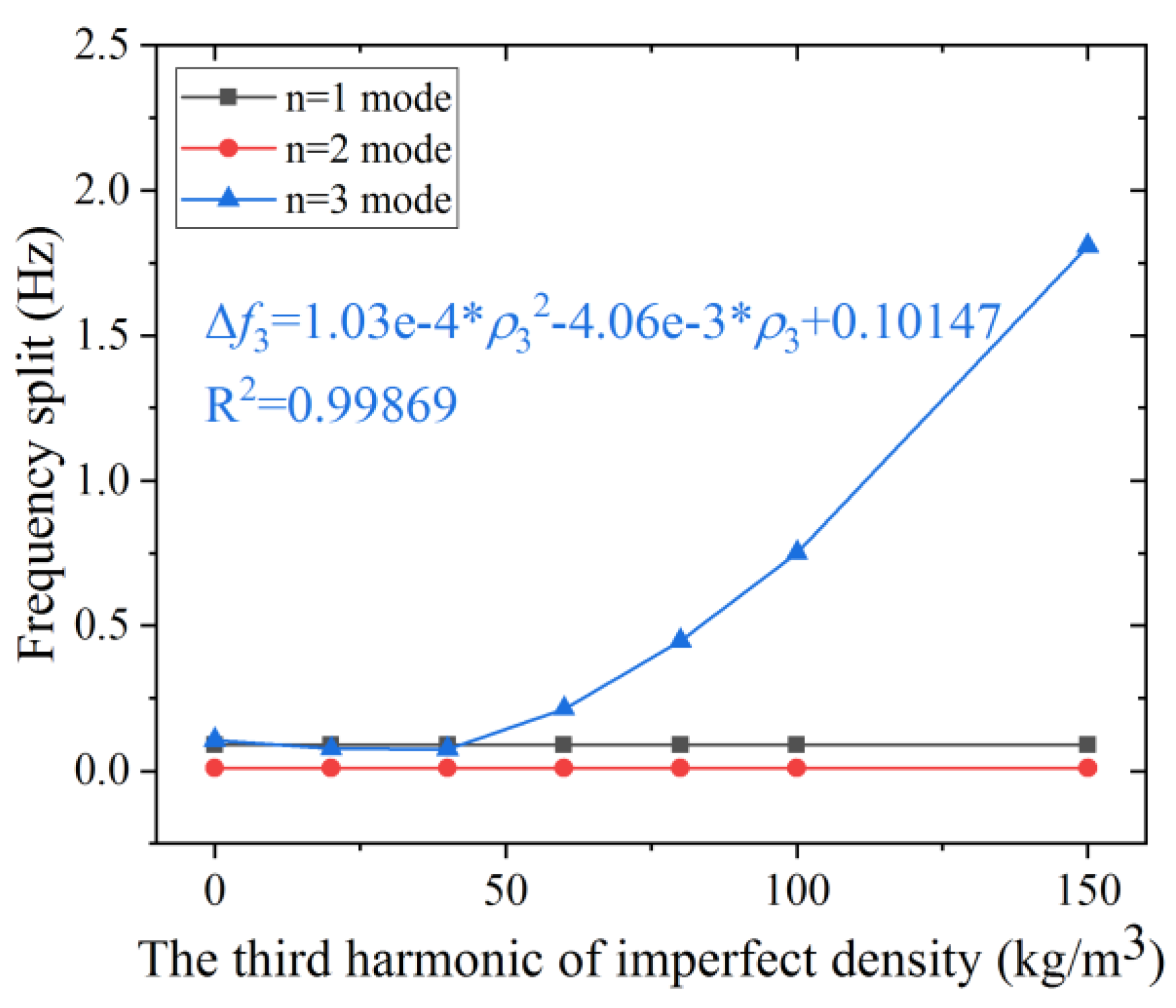
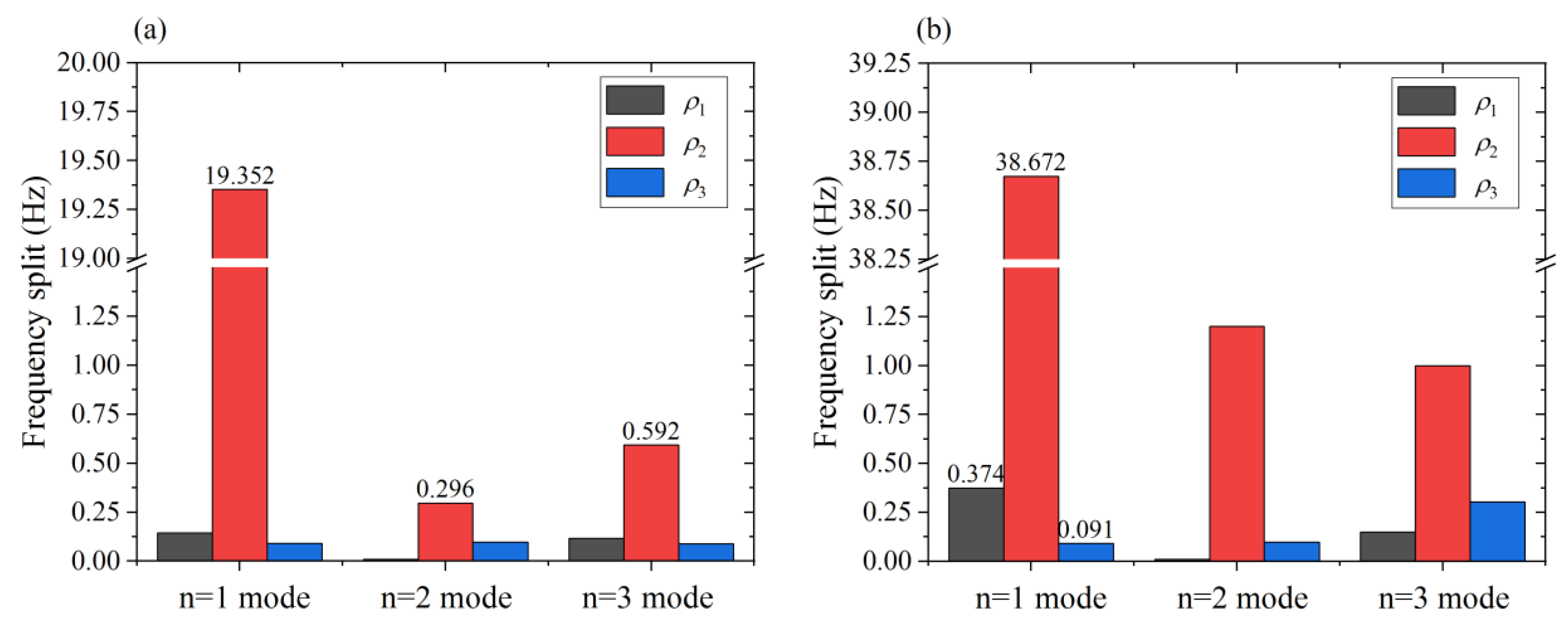
3.2. FEM Analysis of the First Three Harmonic Errors
4. Method of Reduction of the Second Harmonic Error
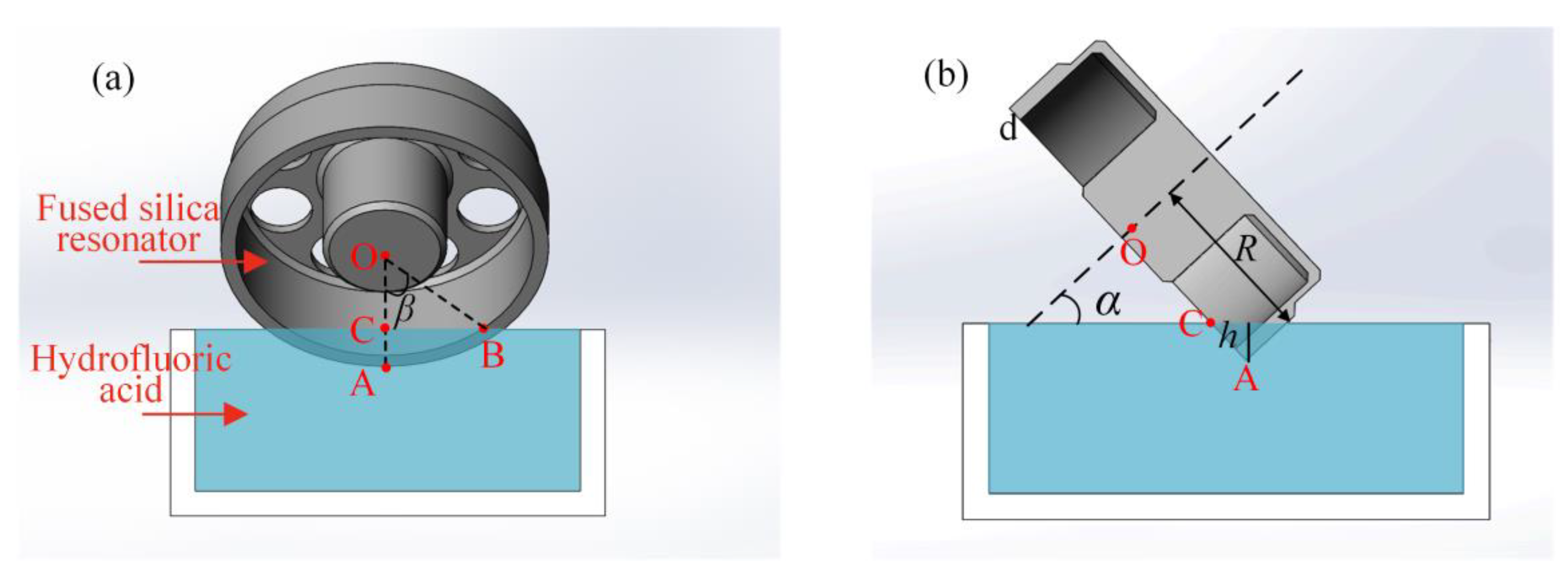
4.1. Chemical Balancing of the Second Harmonic Error
4.2. Determination of the Trimming Positions
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Apostolyuk, V. Coriolis Vibratory Gyroscopes: Theory and Design, 1st ed.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Foloppe, Y.; Lenoir, Y. HRG CrystalTM DUAL CORE: Rebooting the INS revolution. In Proceedings of the DGON Inertial Sensors and Systems Symposium, Braunschweig, Germany, 10–11 September 2019; pp. 1–5. [Google Scholar]
- Xu, Z.; Yi, G.; Er, M.J.; Huang, C. Effect of Uneven Electrostatic Forces on the Dynamic Characteristics of Capacitive Hemispherical Resonator Gyroscopes. Sensors 2019, 19, 1291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, Z.; Yi, G.; Huo, Y.; Qi, Z.; Xu, Z. The Synthesis Model of Flat-Electrode Hemispherical Resonator Gyro. Sensors 2019, 19, 1690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- David, M.R. The Hemispherical Resonator Gyro: From Wineglass to the Planets. In Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting, Savannah, GA, USA, 8–12 February 2009; pp. 1157–1178. [Google Scholar]
- Kim, J.-H.; Kim, J.-H. Trimming of imperfect hemispherical shell including point mass distributions. Int. J. Mech. Sci. 2017, 131, 847–852. [Google Scholar] [CrossRef]
- Yan, S.; Kun, L.; Xiang, X.; Wu, Y.; Dingbang, X.; Xuezhong, W. Geometric Imperfection Characterization and Precise Assembly of Micro Shell Resonators. J. Microelectromech. Syst. 2020, 29, 480–489. [Google Scholar]
- Singh, S.; Darvishian, A.; Yoong Cho, J.; Shiari, B.; Najafi, K. High-Q 3D Micro-Shell Resonator With High Shock Immunity and Low Frequency Mismatch for MEMS Gyroscopes. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems, Seoul, Korea, 27–31 January 2019. [Google Scholar]
- Tal, N.; Jae, Y.C.; Behrouz, S.; Ali, D.; Khalil, N. 259 Second ring-down time and 4.45 million quality factor in 5.5 kHz fused silica birdbath shell resonator. In Proceedings of the 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017. [Google Scholar]
- Pan, Y.; Wang, D.; Wang, Y.; Liu, J.; Wu, S.; Qu, T.; Yang, K.; Luo, H. Monolithic Cylindrical Fused Silica Resonators with High Q Factors. Sensors 2016, 16, 1185. [Google Scholar] [CrossRef] [Green Version]
- Chikovani, V.V.; Okon, I.M.; Barabashov, A.S.; Tewksbury, P. A set of high accuracy low cost metallic resonator CVG. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, PLANS, Monterey, CA, USA, 5–8 May 2008; pp. 236–243. [Google Scholar]
- Chikovani, V.V.; Yatzenko, A.Y.; Kovalenko, A.V. Coriolis Force Gyroscope with High Sensitivity. U.S. Patent 7281425B2, 16 October 2007. [Google Scholar]
- Waston, S.W.; Eau Claire, W.I. High Q Angular Rate Sensing Gyroscope. U.S. Patent 6845667B1, 25 January 2005. [Google Scholar]
- Luo, Y.; Qu, T.; Cui, Y.; Pan, Y.; Yu, M.; Luo, H.; Jia, Y.; Tan, Z.; Liu, J.; Zhang, B. Cylindrical Fused Silica Resonators Driven by PZT Thin Film Electrodes with Q Factor Achieving 2.89 Million after Coating. Sci. Rep. 2019, 9, 9461. [Google Scholar] [CrossRef]
- Fox, C.H.J. A simple theory for the analysis and correction of frequency splitting in slightly imperfect ring. J. Sound Vib. 1990, 142, 227–243. [Google Scholar] [CrossRef]
- Joubert, S.V.; Shatalov, M.Y.; Coetzee, C.E. Using Fourier series to analyse mass imperfections in vibratory gyroscopes. J. Symb. Comput. 2014, 61– 62, 116–127. [Google Scholar] [CrossRef]
- Bisegna, P.; Caruso, G. Frequency split and vibration localization in imperfect rings. J. Sound Vib. 2007, 306, 691–711. [Google Scholar] [CrossRef]
- Μатвеев, B.A.; Лунин, Б.C.; Басараб, M.A. НΑВИГΑЦИОННЪΙΕ СИСТΕΜЪΙ НΑ ВОЛНОВЪΙХ ТВΕРДОТΕЛЪНЪΙХ ГИРОСКОПΑХ; Harbin Institute of Technology Press: Harbin, China, 2013. [Google Scholar]
- Painter, C.C.; Shkel, A.M. Identification of anisoelasticity for electrostatic trimming of rate-integrating gyroscopes. In Proceedings of the International Society for Optical Engineering, Singapore, 18–21 July 2002; pp. 157–168. [Google Scholar]
- Efimovskaya, A.; Yu-Wei, L.; Danmeng, W.; Shkel, A.M. Electrostatic compensation of structural imperfections in dynamically amplified dual-mass gyroscope. In Proceedings of the 4th IEEE International Symposium on Inertial Sensors and Systems, INERTIAL 2017, Kauai, HI, USA, 27–30 March 2017; pp. 1–4. [Google Scholar]
- Hu, Z.X.; Gallacher, B.J.; Burdess, J.S.; Bowles, S.R.; Grigg, H.T.D. A systematic approach for precision electrostatic mode tuning of a MEMS gyroscope. J. Micromech. Microeng. 2014, 24, 125003. [Google Scholar] [CrossRef]
- Lu, K.; Xi, X.; Li, W.; Shi, Y.; Hou, Z.; Zhuo, M.; Wu, X.; Wu, Y.; Xiao, D. Research on precise mechanical trimming of a micro shell resonator with T-shape masses using femtosecond laser ablation. Sens. Actuators A Phys. 2019, 290, 228–238. [Google Scholar] [CrossRef]
- Raspopov, V.Y.; Volchikhin, I.A. Solid-state wave gyroscope ensuring the required accuracy parameters. In Proceedings of the 25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 28–30 May 2018; pp. 1–3. [Google Scholar]
- Tao, Y.; Xi, X.; Xiao, D.; Tan, Y.; Cui, H.; Wu, X. Precision balance method for cupped wave gyro based on cup-bottom trimming. Chin. J. Mech. Eng. 2012, 25, 63–70. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, Y.; Zhong, H.; Zeng, K.; Sun, X.; Duan, J. Precise Dynamic Mass-stiffness Balancing of Cylindrical Shell Vibrating Gyroscope along Working Modal Axis. IEEE Sens. J. 2019, 19, 10347–10354. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, Y.; Qu, T.; Jia, Y.; Yang, K.; Luo, H. Decreasing Frequency Splits of Hemispherical Resonators by Chemical Etching. Sensors 2018, 18, 3772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Basarab, M.A.; Lunin, B.S.; Matveev, V.A.; Chumankin, E.A. Static balancing of metal resonators of cylindrical resonator gyroscopes. Gyroscopy Navig. 2014, 5, 213–218. [Google Scholar] [CrossRef]
- Syms, R.R.A.; Moore, D.F. Focused ion beam tuning of in-plane vibrating micromechanical resonators. Electron. Lett. 1999, 35, 1–2. [Google Scholar] [CrossRef] [Green Version]
- Behbahani, A.H.; Kim, D.; Stupar, P.; DeNatale, J.; M’Closkey, R.T. Tailored Etch Profiles for Wafer-Level Frequency Tuning of Axisymmetric Resonators. J. Microelectromech. Syst. 2017, 26, 333–343. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Pan, Y.; Jia, Y.; Liu, J.; Tan, Z.; Yang, Z.; Luo, H. Frequency tuning of fused silica cylindrical resonators by chemical etching. In Proceedings of the DGON Inertial Sensors and Systems Symposium, Braunschweig, Germany, 10–11 September 2019; p. 6. [Google Scholar]
- Jeanroy, A.; Bouvet, A.; Remillieux, G. HRG and marine applications. Gyroscopy Navig. 2014, 5, 67–74. [Google Scholar] [CrossRef]
- Bodunov, B.P.; Lopatin, V.M.; Lunin, B.S.; Lynch, D.D.; Voros, A.R. Low-Cost Hemispherical Resonator for Use in Small Commercial HRG-Based Navigation Systems. In Proceedings of the 4th Saint Petersburg International Conference on Integrated Navigation Systems, Saint Petersburg, Russia, 26–28 May 1997; pp. 41–47. [Google Scholar]
- McWilliam, S.; Ong, J.; Fox, C.H.J. On the statistics of natural frequency splitting for rings with random mass imperfections. J. Sound Vib. 2005, 279, 453–470. [Google Scholar] [CrossRef]
- Basarab, M.A.; Lunin, B.S.; Matveev, V.A.; Chumankin, E.A. Balancing of hemispherical resonator gyros by chemical etching. Gyroscopy Navig. 2015, 6, 218–223. [Google Scholar] [CrossRef]
- Rourke, A.K.; McWilliam, S.; Fox, C.H.J. Multi-Mode Trimming of Imperfect Thin Rings Using Masses at Pre-Selected Locations. J. Sound Vib. 2002, 256, 319–345. [Google Scholar] [CrossRef]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; McNie, M.E. Multimodal tuning of a vibrating ring using laser ablation. Proc. Instn Mech. Engrs. Part. C J. Mech. Eng. Sci. 2003, 217, 557–576. [Google Scholar] [CrossRef]
- Behbahani, A.H.; M’Closkey, R.T. Multimodal Tuning of an Axisymmetric Resonator. J. Dyn. Sys. Meas. Control. 2019, 141, 91010. [Google Scholar] [CrossRef] [Green Version]
- Weinberg, M. Symmetric Gyroscope Frequency Separation by Geometry and Roughness. In Proceedings of the International Symposium on Inertial Sensors and Systems (ISISS), Laguna Beach, CA, USA, 25–26 February 2014. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perfect density | 2203 kg/m3 |
| Young’s modulus | 71.7 GPa |
| Poisson’s ratio | 0.17 |
| Inner radius of resonator shell | 12 mm |
| Thickness of resonator shell | 1.2 mm |
| Mode | The First Harmonic Error | The Second Harmonic Error | The Third Harmonic Error | |
|---|---|---|---|---|
| n = 1 | Contribution | 1.35% | 98.51% | 0.14% |
| Relation | Quadratic | Linear | Nearly no impact | |
| n = 2 | Contribution | 0.24% | 99.45% | 0.31% |
| Relation | Approximate Quadratic | Quadratic | Nearly no impact | |
| n = 3 | Contribution | 3.49% | 83.95% | 12.56% |
| Relation | Quadratic | Approximate Quadratic | Quadratic | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Pan, Y.; Liu, J.; Jia, Y.; Yang, K.; Luo, H. A Novel Method for Estimating and Balancing the Second Harmonic Error of Cylindrical Fused Silica Resonators. Micromachines 2021, 12, 380. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12040380
Tao Y, Pan Y, Liu J, Jia Y, Yang K, Luo H. A Novel Method for Estimating and Balancing the Second Harmonic Error of Cylindrical Fused Silica Resonators. Micromachines. 2021; 12(4):380. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12040380
Chicago/Turabian StyleTao, Yunfeng, Yao Pan, Jianping Liu, Yonglei Jia, Kaiyong Yang, and Hui Luo. 2021. "A Novel Method for Estimating and Balancing the Second Harmonic Error of Cylindrical Fused Silica Resonators" Micromachines 12, no. 4: 380. https://0-doi-org.brum.beds.ac.uk/10.3390/mi12040380