
Simulations and Experiments on the Vibrational Characteristics of Cylindrical Resonators with First Three Harmonic Errors

Abstract
:1. Introduction
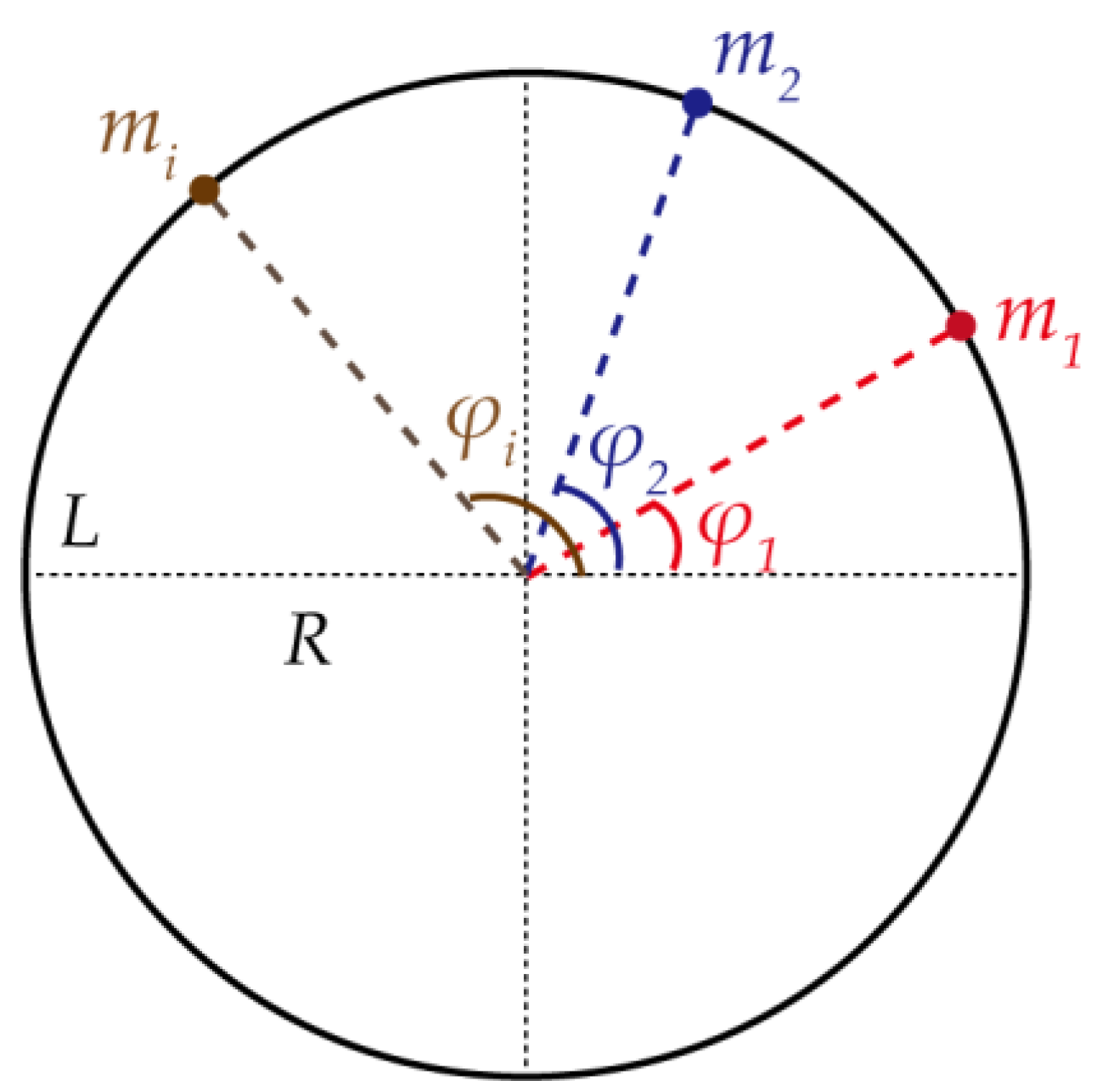
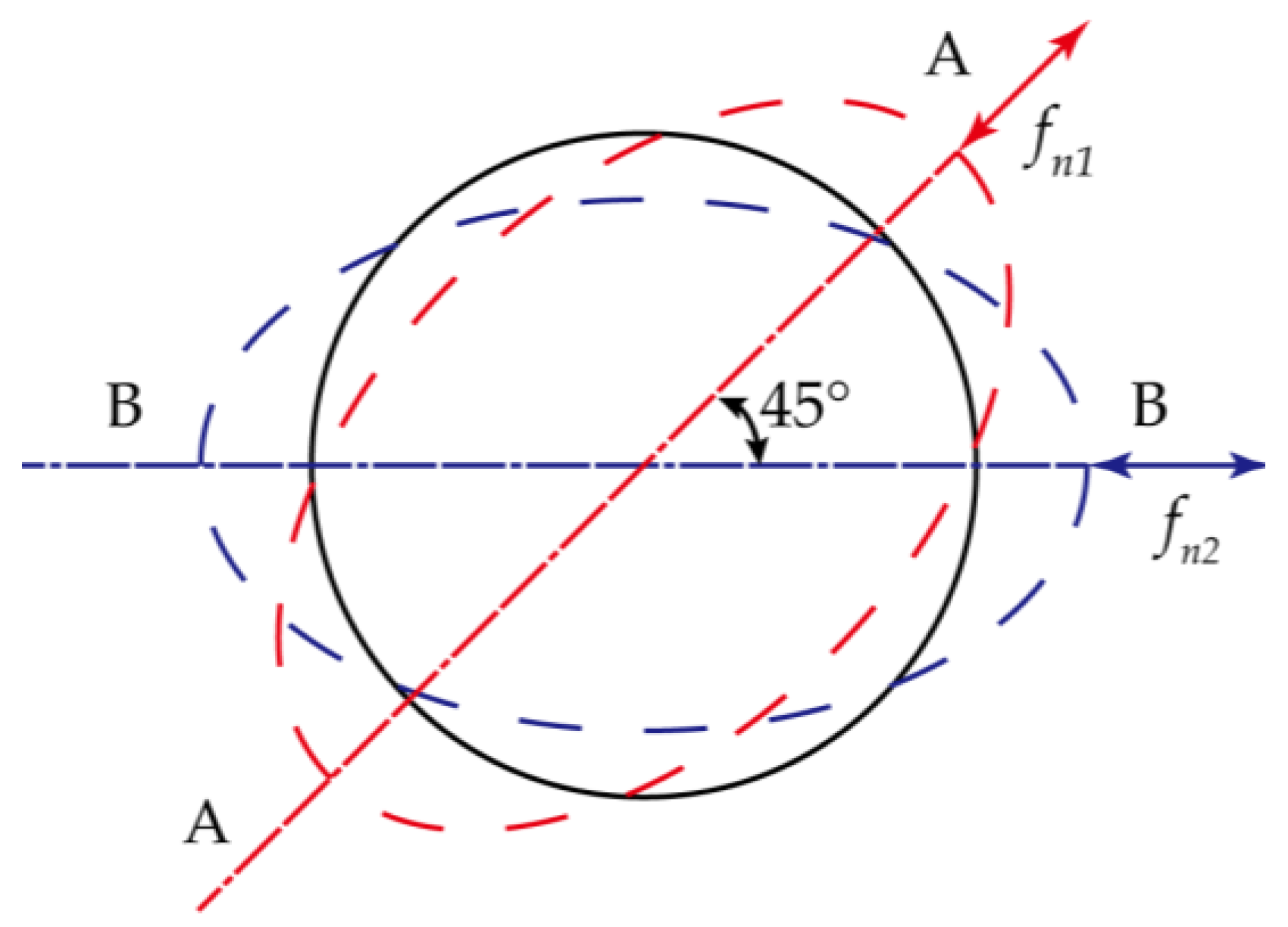
2. Mathematical Model
3. Simulations
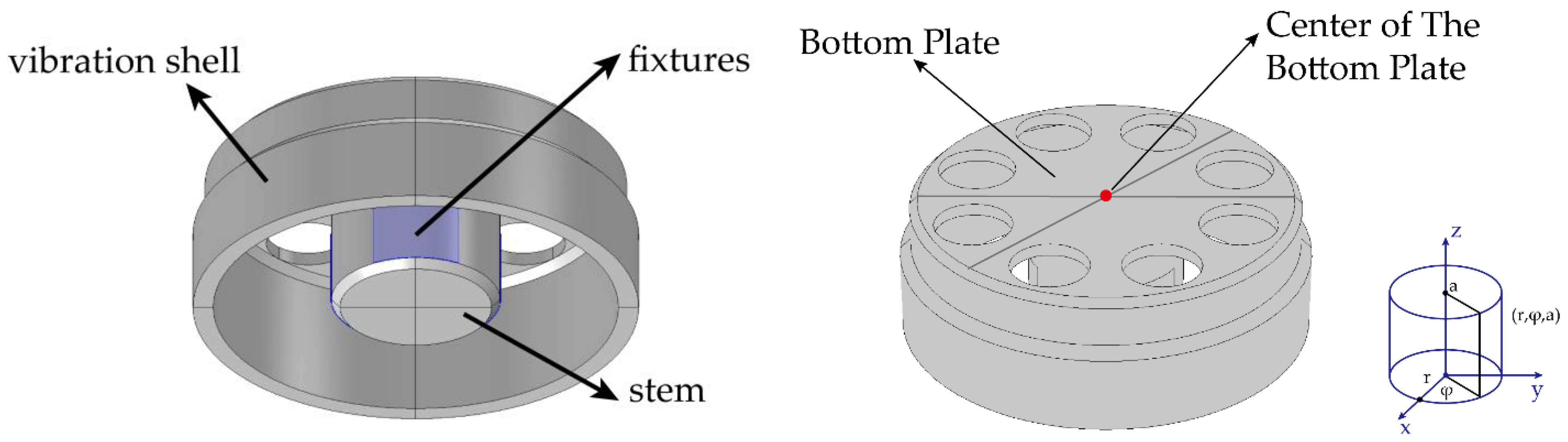
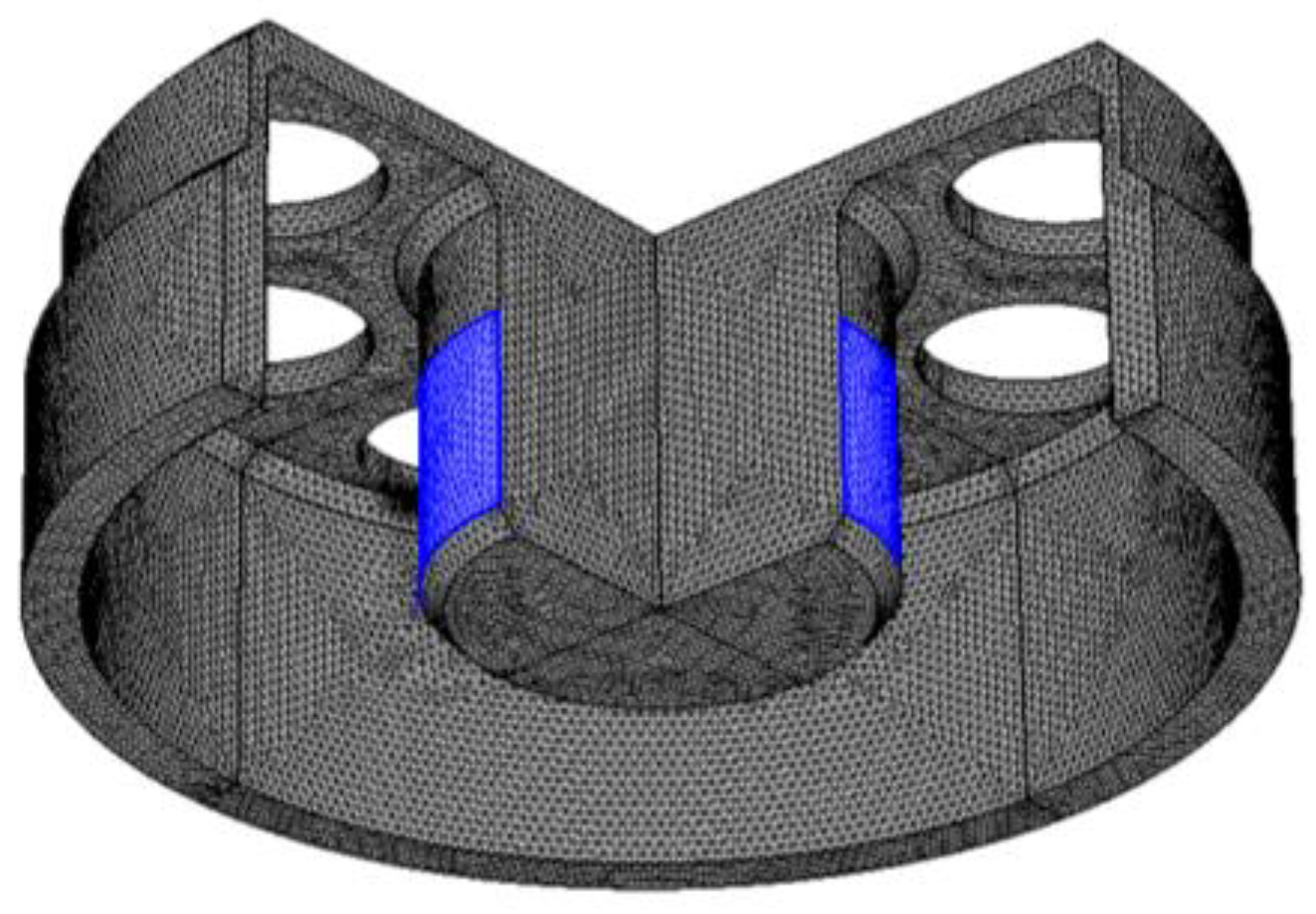
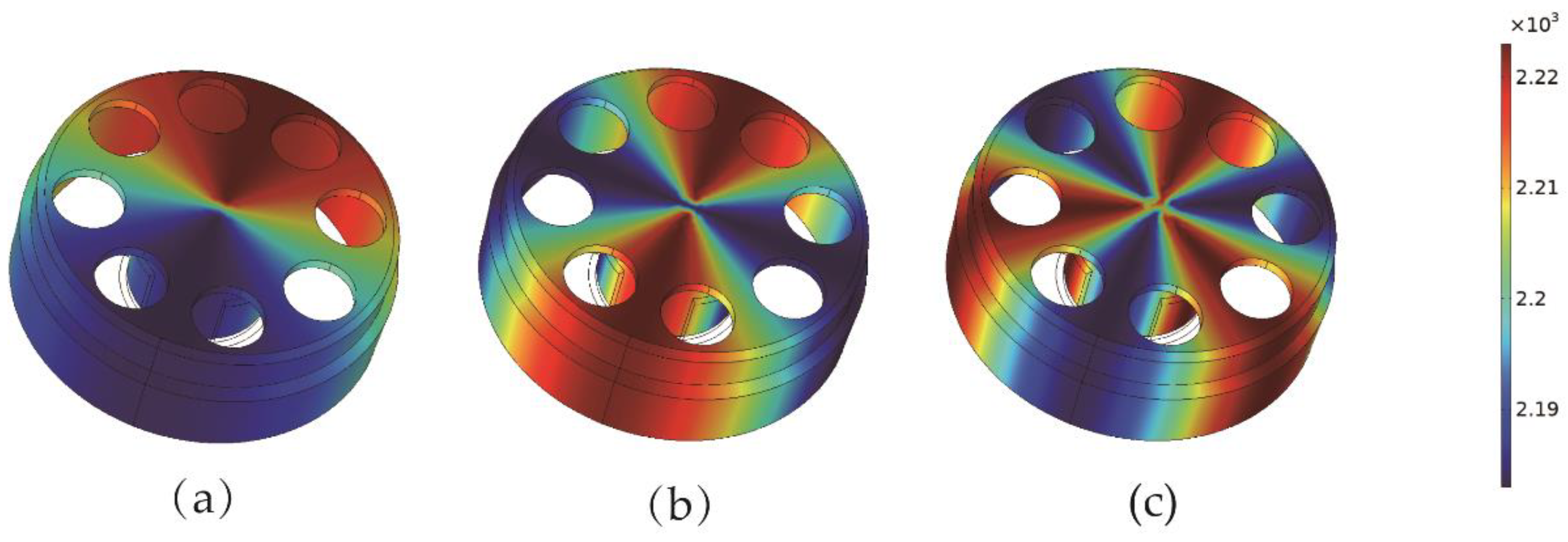
3.1. Establish the Resonator Model
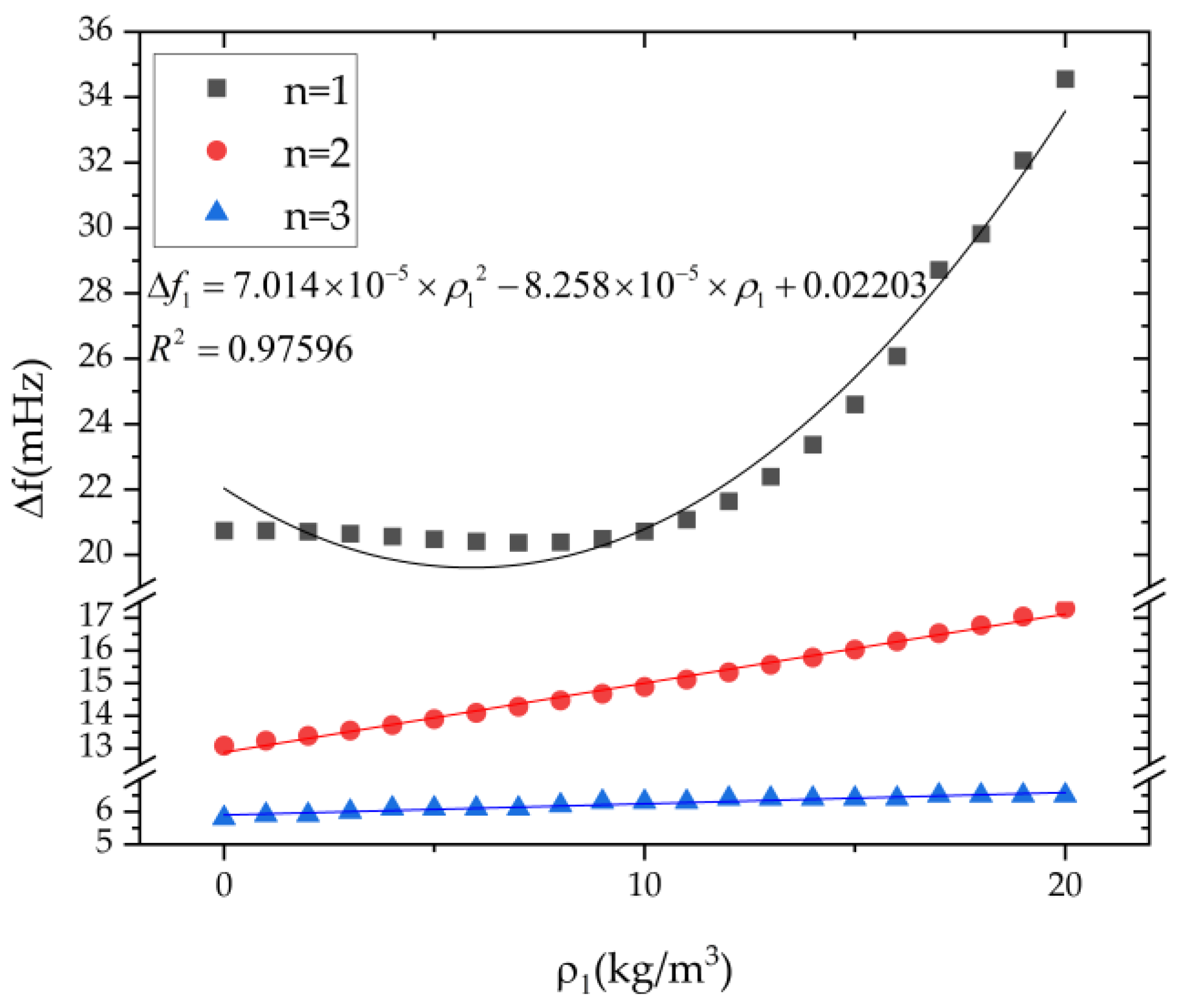
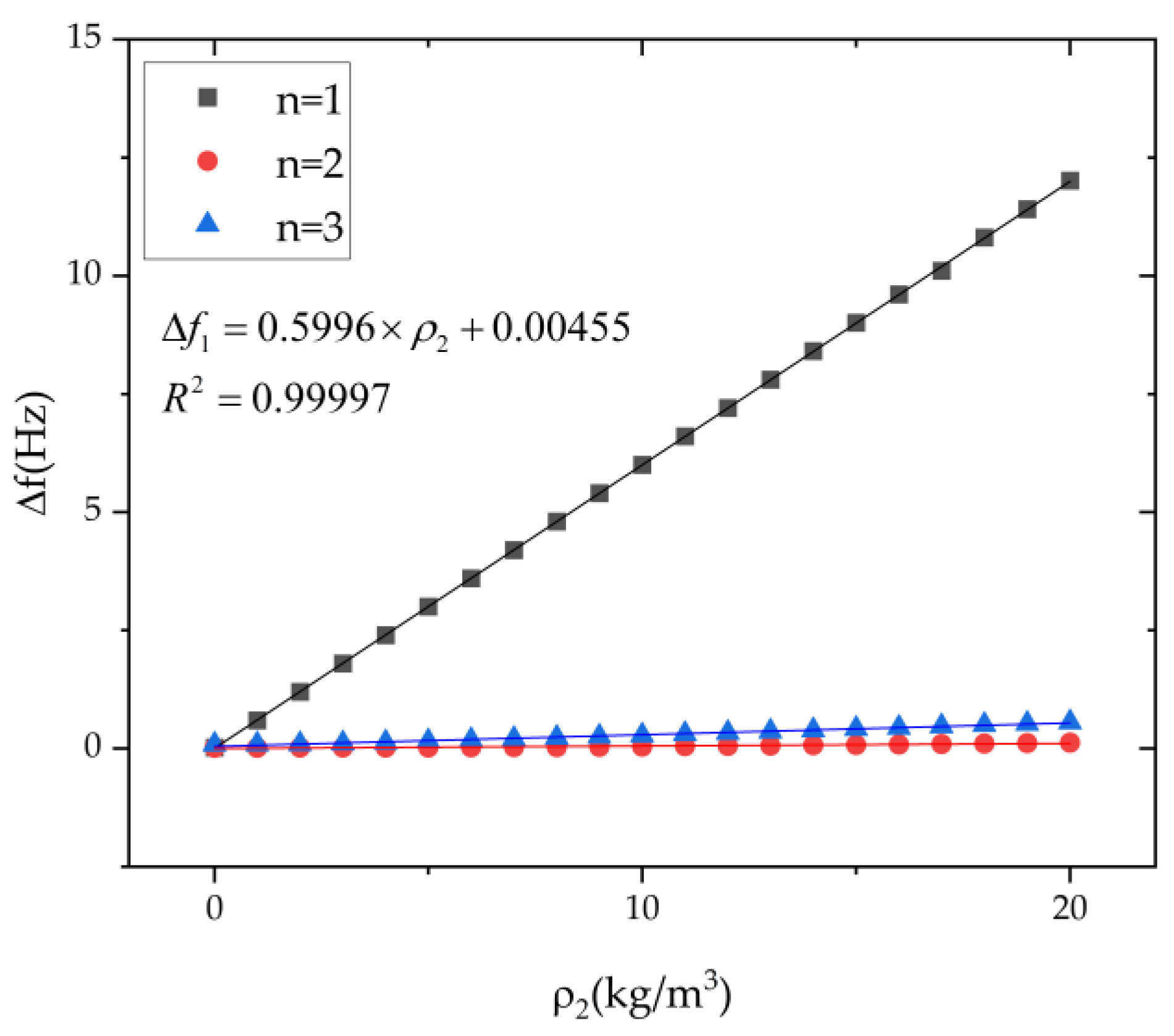
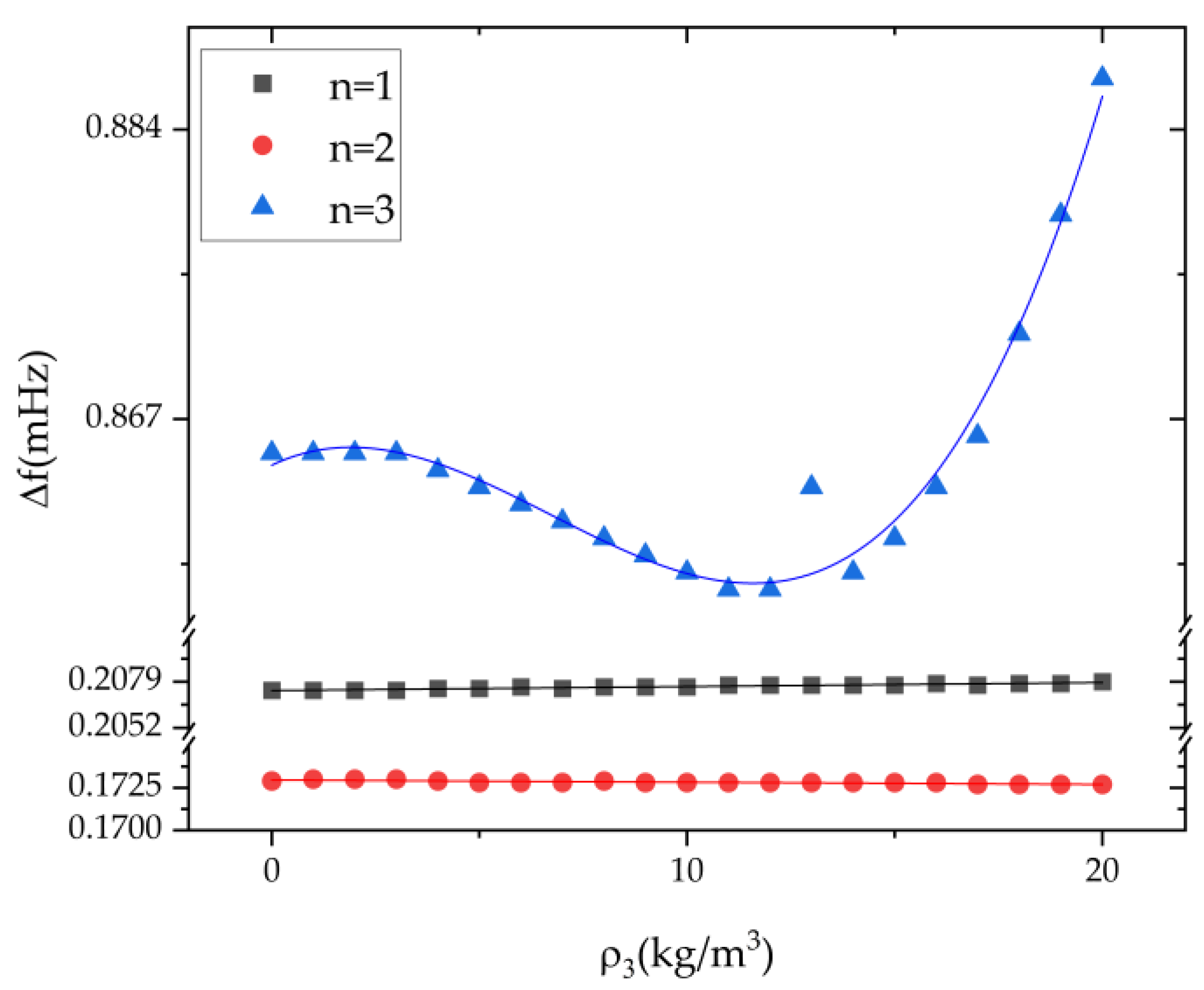
3.2. Relationships between the First Three Harmonic Errors and the Frequency Splits
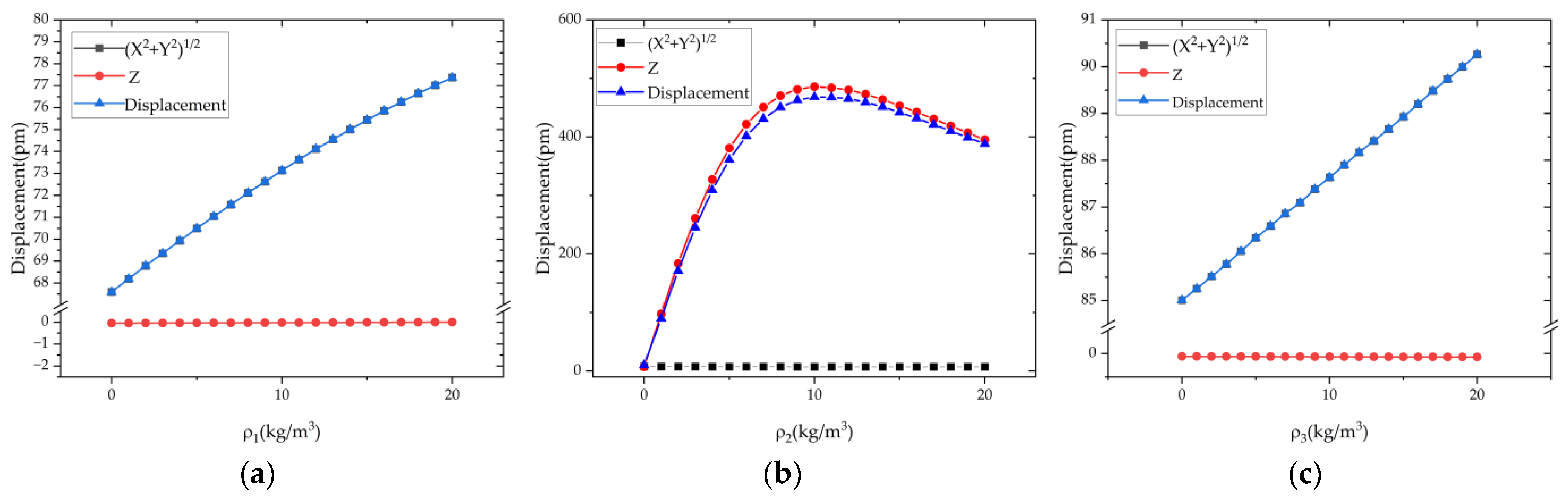
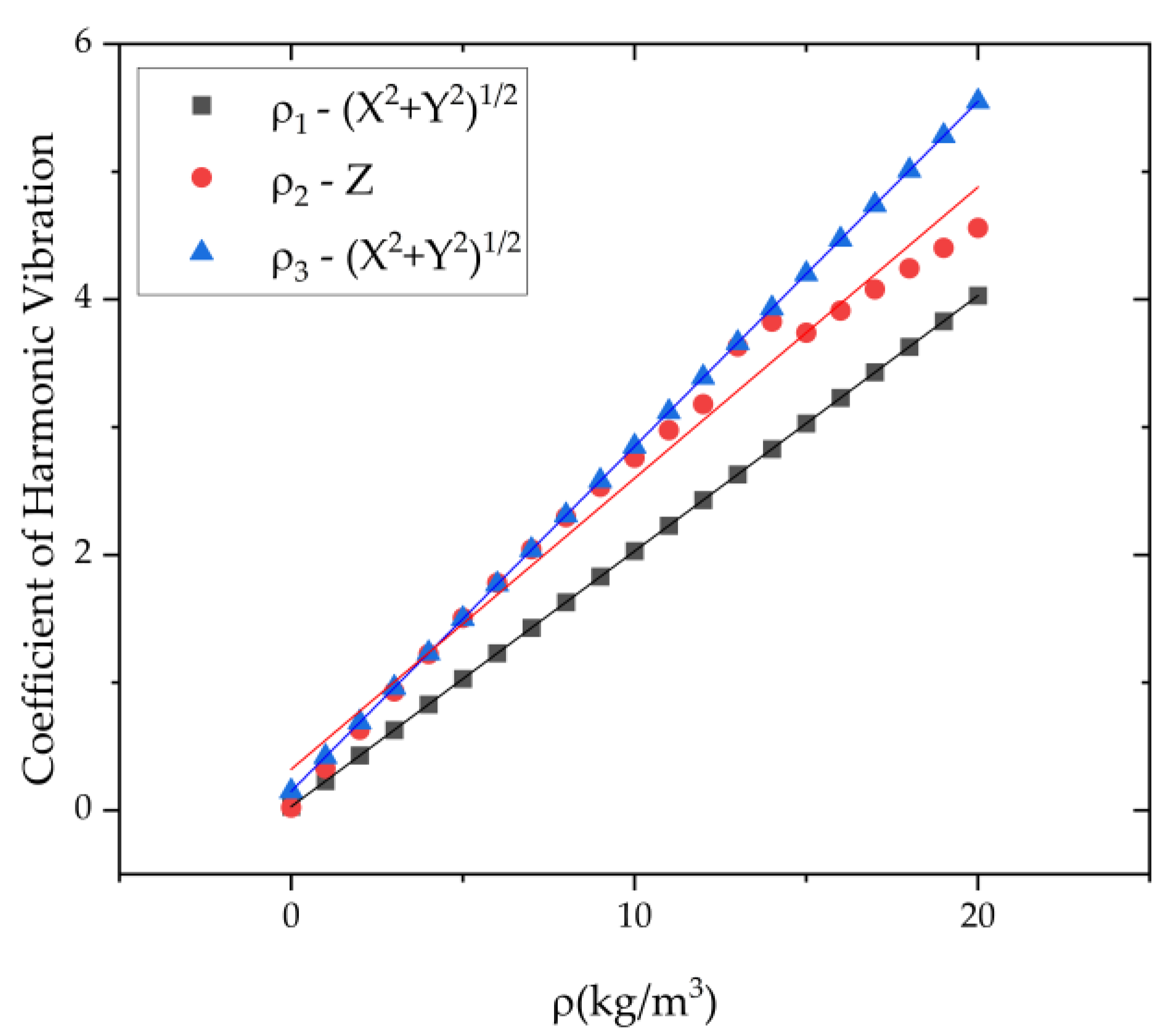
3.3. Relationships between the Displacement of the Center of the Bottom Plate and the First Three Harmonic Errors
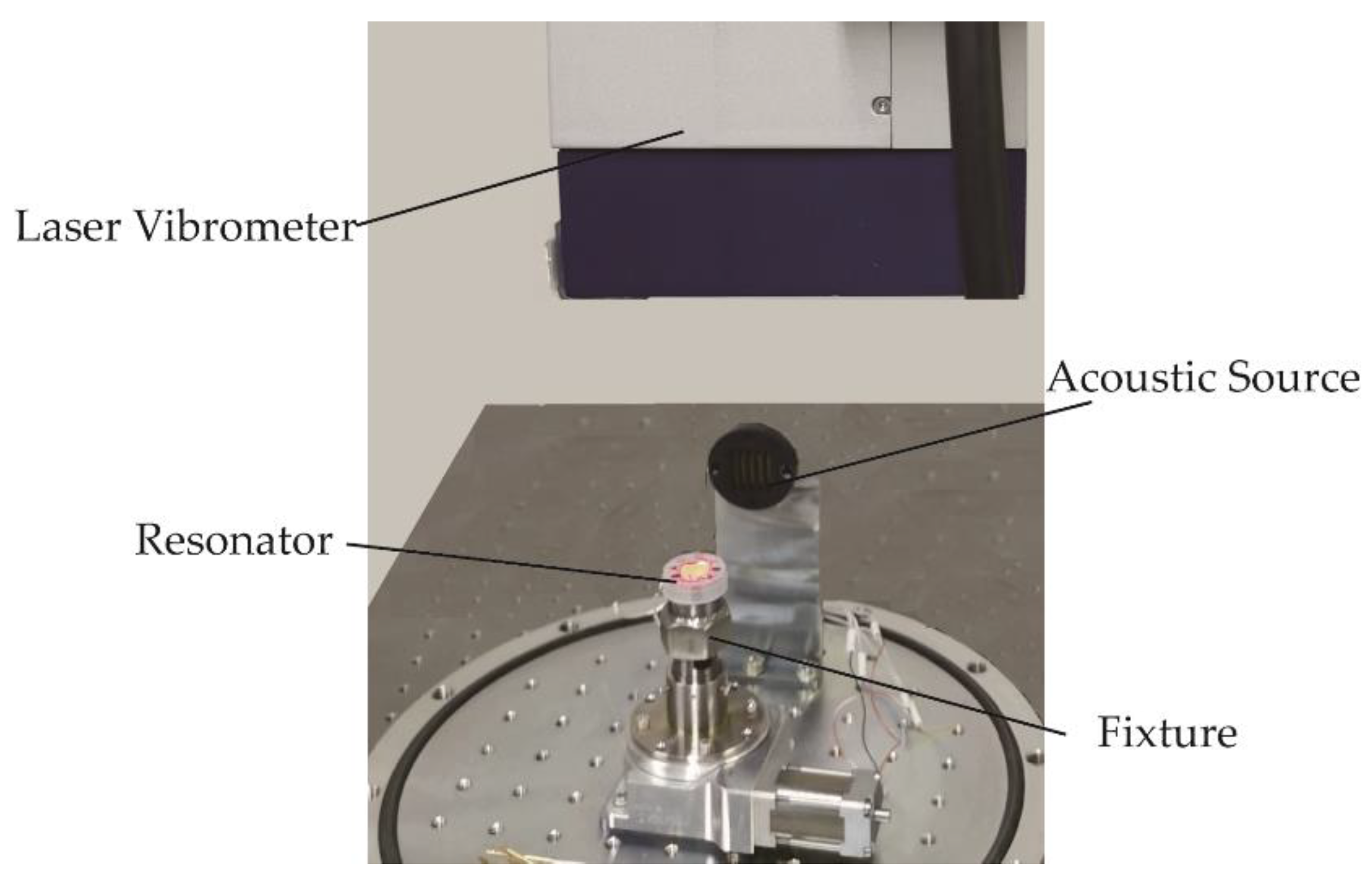
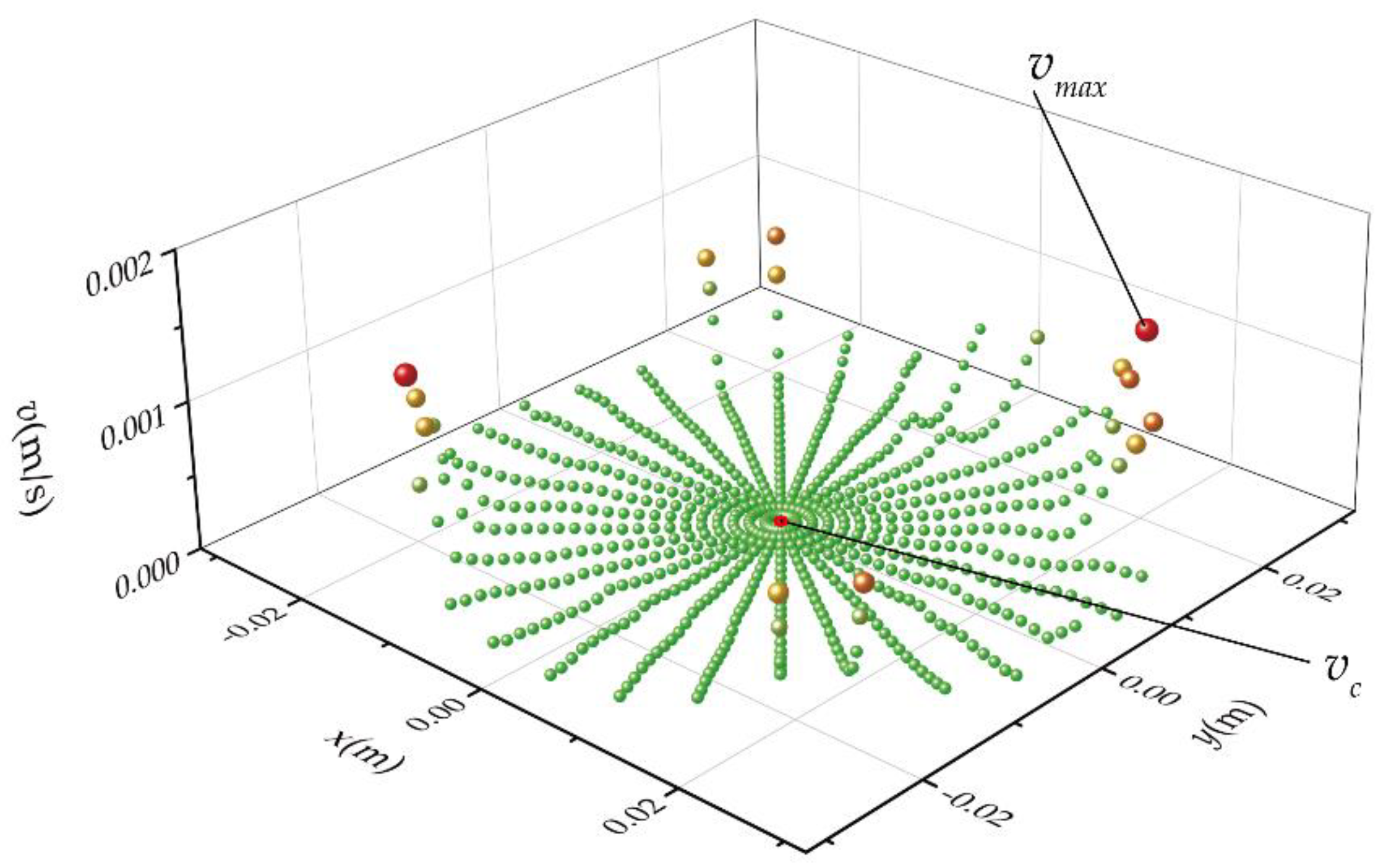
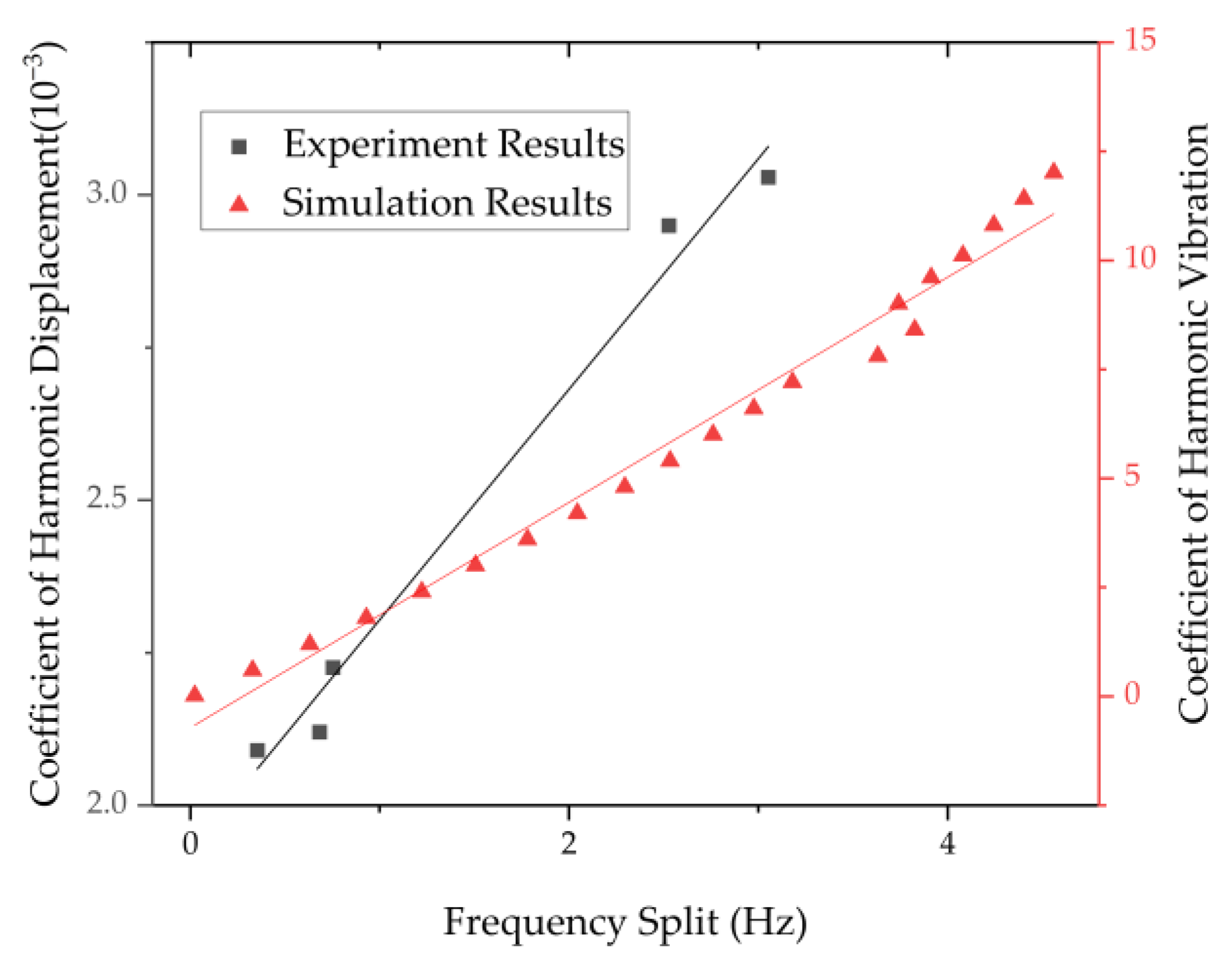
4. Experiments
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Neil, M.B.; John, M.E.; Roy, H.S. Inertial Instruments: Where to Now. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Hilton Head Island, SC, USA, 10–12 August 1992; pp. 566–574. [Google Scholar]
- Jerebets, S.A. Gyro Evaluation for the Mission to Jupiter. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–9. [Google Scholar]
- Isaak, M.O.; Dmitri, V.S.; Anton, S.B. Sensing Element of Coriolis Force Gyroscope. U.S. Patent 0154542A1, 24 June 2010. [Google Scholar]
- Waston, S.W.; Eau Claire, W.I. High Q Angular Rate Sensing Gyroscope. U.S. Patent 6845667B1, 25 January 2005. [Google Scholar]
- Chikovani, V.V.; Okon, I.M.; Barabashov, A.S.; Tewksbury, P. A set of high accuracy low cost metallic resonator CVG. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 238–243. [Google Scholar]
- Jin, L.; Qin, S.-Y.; Zhang, R.; Li, M.-W. High-sensitivity tunneling magneto-resistive micro-gyroscope with immunity to external magnetic interference. Sci. Rep. 2020, 10, 16441. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Wang, D.; Wang, Y.; Liu, J.; Wu, S.; Qu, T.; Yang, K.; Luo, H. Monolithic Cylindrical Fused Silica Resonators with High Q Factors. Sensors 2016, 16, 1185. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chikovani, V.V.; Okon, I.M.; Barabashov, A.S. Digitally Controlled High Accuracy Metallic Resonator CVG. In Proceedings of the Symposium Gyro Technology, Stuttgart, Germany, 19–20 September 2006; pp. 4.0–4.7. [Google Scholar]
- Anders, J.; Pearson, R. Applications of the ‘START’ Vibratory Gyroscope. GEC Rev. 1994, 9, 168–175. [Google Scholar]
- Cho, J.Y.; Woo, J.; He, G.; Yang, D.; Boyd, C.; Singh, S.; Darvishian, A.; Shiari, B.; Najafi, K. 1.5-Million Q-Factor Vacuum-Packaged Birdbath Resonator Gyroscope (BRG). In Proceedings of the 2019 IEEE 32th International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Korea, 27–31 January 2019; pp. 210–213. [Google Scholar]
- Fox, C.H. A simple theory for the analysis and correction of frequency splitting in slightly imperfect rings. J. Sound Vib. 1990, 142, 227–243. [Google Scholar] [CrossRef]
- Joubert, S.V.; Shatalov, M.Y.; Coetzee, C.E. Using Fourier series to analyse mass imperfections in vibratory gyroscopes. J. Symb. Comput. 2014, 61, 116–127. [Google Scholar] [CrossRef]
- Maтвеев, B.A.; Лунин, Б.C.; Бaсaрaб, M.A. НABИГAЦИОННЪIE CИCТEMЪI НA BОЛНОBЪIХ ТBEРДОТEЛЪНЪIХГИРОCКОΠAХ; Harbin Institute of Technology Press: Harbin, China, 2013. [Google Scholar]
- Bisegna, P.; Caruso, G. Frequency split and vibration localization in imperfect rings. Journal of Sound Vibration 2007, 306, 691–711. [Google Scholar] [CrossRef]
- Mcwilliam, S.; Ong, J.S.A.; Fox, C.H. On the statistics of natural frequency splitting for rings with random mass imperfections. J. Sound Vib. 2005, 279, 453–470. [Google Scholar] [CrossRef]
- Rourke, A.K.; Mcwilliam, S.; Fox, C.H. Frequency trimming of a vibrating ring-based multi-axis rate sensor. J. Sound Vib. 2005, 280, 495–530. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, Y.; Zhong, H.; Zeng, K.; Sun, X.; Duan, J.A. Precise Dynamic Mass-Stiffness Balancing of Cylindrical Shell Vibrating Gyroscope Along Working Modal Axis. IEEE Sens. J. 2019, 19, 10347–10354. [Google Scholar] [CrossRef]
- Hu, Z.; Gallacher, B.J.; Burdess, J.S.; Bowles, S.; Grigg, H.T.D. A systematic approach for precision electrostatic mode tuning of a MEMS gyroscope. J. Micromechanics Microengineering 2014, 24, 125003. [Google Scholar] [CrossRef]
- Pan, Y.; Tao, Y.; Zeng, L.; Tang, X.; Yang, K.; Luo, H. Investigation on the Optimal Fixation Condition of Cylindrical Resonators. In Proceedings of the 28th Saint Petersburg International Conference on Integrated Navigation Systems, Saint Petersburg, Russia, 31 May 2021–2 June 2021; pp. 1–3. [Google Scholar]
- Tao, Y.; Xi, X.; Xiao, D.; Tan, Y.Q.; Cui, H.J.; Wu, X. Precision balance method for cupped wave gyro based on cup-bottom trimming. Chin. J. Mech. Eng. 2012, 25, 63–70. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, Y.; Qu, T.; Jia, Y.; Yang, K.; Luo, H. Decreasing Frequency Splits of Hemispherical Resonators by Chemical Etching. Sensors 2018, 18, 3772. [Google Scholar] [CrossRef] [Green Version]
- Haedong, E.; Jungju, K.; Subong, K.; Ilkeun, K. Force Measuring Apparatus for Mass Imbalance Measurement of Hemispherical Resonator. KR Patent 20170176252A, 20 December 2017. [Google Scholar]
- Vasiliy, P.; Zeng, X.; Luo, J.; Rakhim, R.; Zuo, W.; Zhang, X.; Tian, C.; Zou, C.; Fu, D.; Yang, B. Double-step gas cluster ion beam smoothing. Acta Phys. Sin. 2021, 70, 053601. [Google Scholar] [CrossRef]
- Bodunov, B.P.L.; Lopatin, V.M.; Lunin, B.S. Method Of Balancing of Hemispherical Resonator of Wave Solid Gyroscope. RU Patent 98122643A, 4 December 1998. [Google Scholar]
- Zhbanov, Y.K.; Zhuravlev, V.P. Effect of movability of the resonator center on the operation of a hemispherical resonator gyro. Mech. Solids 2007, 42, 851–859. [Google Scholar] [CrossRef]
- Basarab, M.A.; Chumankin, E.A.; Lunin, B.S.; Matveev, V.A. Application of a magnetic sensor for determining the mass imbalance of the Coriolis vibratory gyroscope with cylindrical metallic resonator. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Spring (PIERS), St. Petersburg, Russia, 22–25 May 2017; pp. 2975–2979. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Young’s Modulus (GPa) | Poisson’s Ratio | Density (kg/m3) | |
|---|---|---|---|
| Resonator | 71.7 | 0.17 | 2203 |
| Fixture | 90 | 0.32 | 8500 |
| Resonator Number | Vibration Frequency (Hz) | Frequency Under n = 1 Mode (Hz) | Frequency Split Under n = 1 (Hz) | vmax (μm/s) | vc (μm/s) | Γ (10−3) | |
|---|---|---|---|---|---|---|---|
| 1 | 8078.748 | 3102.380 | 3104.907 | 2.527 | 968.2 | 2.858 | 2.95 |
| 2 | 8119.080 | 3129.590 | 3132.642 | 3.052 | 1167 | 3.535 | 3.029 |
| 3 | 8104.285 | 3071.240 | 3071.923 | 0.683 | 1278 | 2.710 | 2.12 |
| 4 | 8095.251 | 3110.010 | 3110.754 | 0.753 | 1176 | 2.618 | 2.226 |
| 5 | 8166.211 | 3397.705 | 3398.059 | 0.354 | 1156.9 | 2.418 | 2.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, C.; Yang, K.; Pan, Y.; Tao, Y.; Li, J.; Jin, S.; Luo, H. Simulations and Experiments on the Vibrational Characteristics of Cylindrical Resonators with First Three Harmonic Errors. Micromachines 2022, 13, 1679. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13101679
Liang C, Yang K, Pan Y, Tao Y, Li J, Jin S, Luo H. Simulations and Experiments on the Vibrational Characteristics of Cylindrical Resonators with First Three Harmonic Errors. Micromachines. 2022; 13(10):1679. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13101679
Chicago/Turabian StyleLiang, Chen, Kaiyong Yang, Yao Pan, Yunfeng Tao, Jingyu Li, Shilong Jin, and Hui Luo. 2022. "Simulations and Experiments on the Vibrational Characteristics of Cylindrical Resonators with First Three Harmonic Errors" Micromachines 13, no. 10: 1679. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13101679