
Effect of the Fracturing Degree of the Source Rock on Rock Avalanche River-Blocking Behavior Based on the Coupled Eulerian-Lagrangian Technique

Abstract
:1. Introduction
2. Methodology
2.1. CEL Technique
2.2. Governing Equation of Material
2.3. Dynamic Analysis Method
3. Model Validation
4. Design of Landslide River-Blocking Simulation
5. Results and Discussion
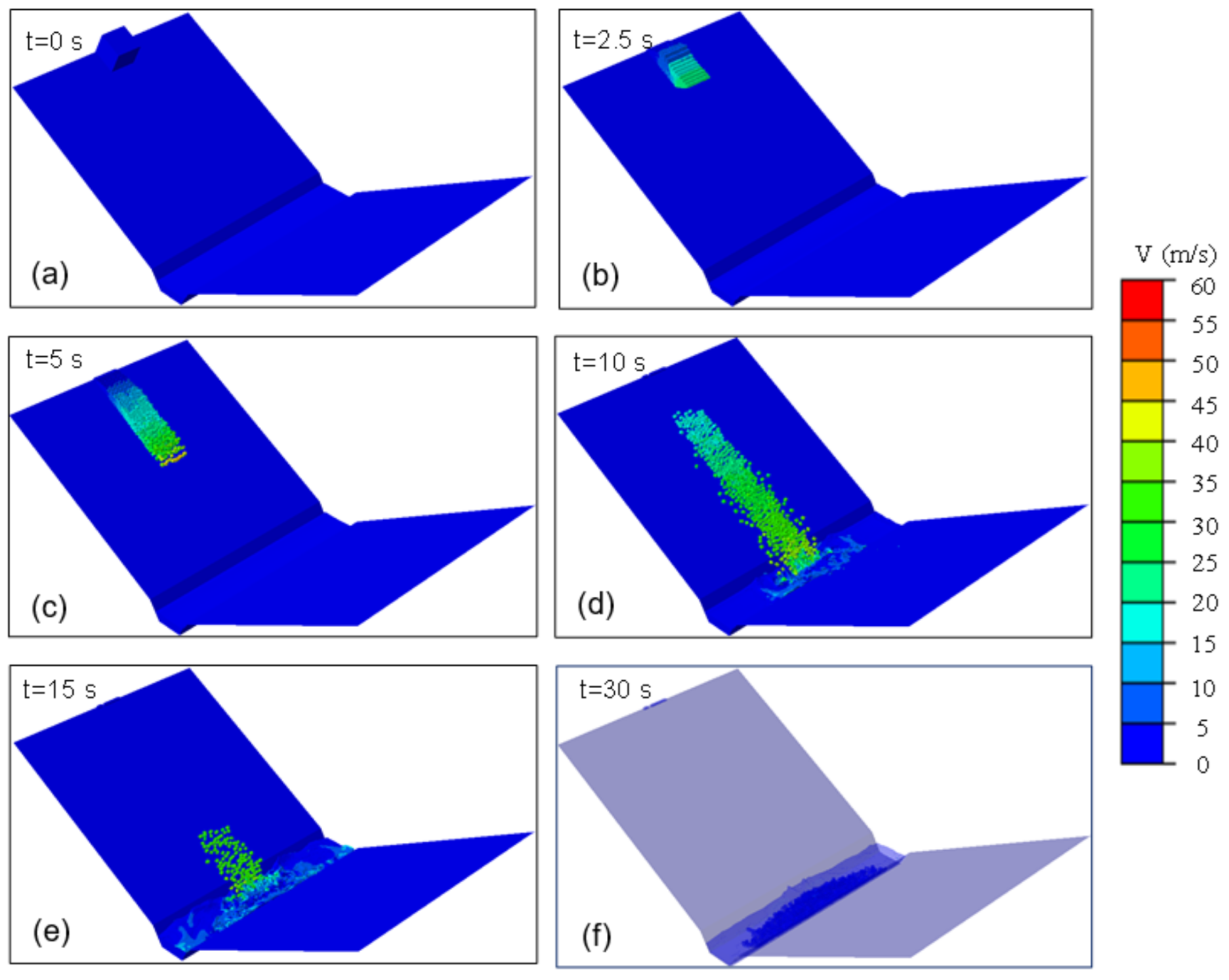
5.1. Typical Runout Process
5.2. Effect of the Fracturing Degree of the Source Rock on Sliding Behavior
5.3. Effect of the Fracturing Degree of the Source Rock on Impulse Wave Behavior
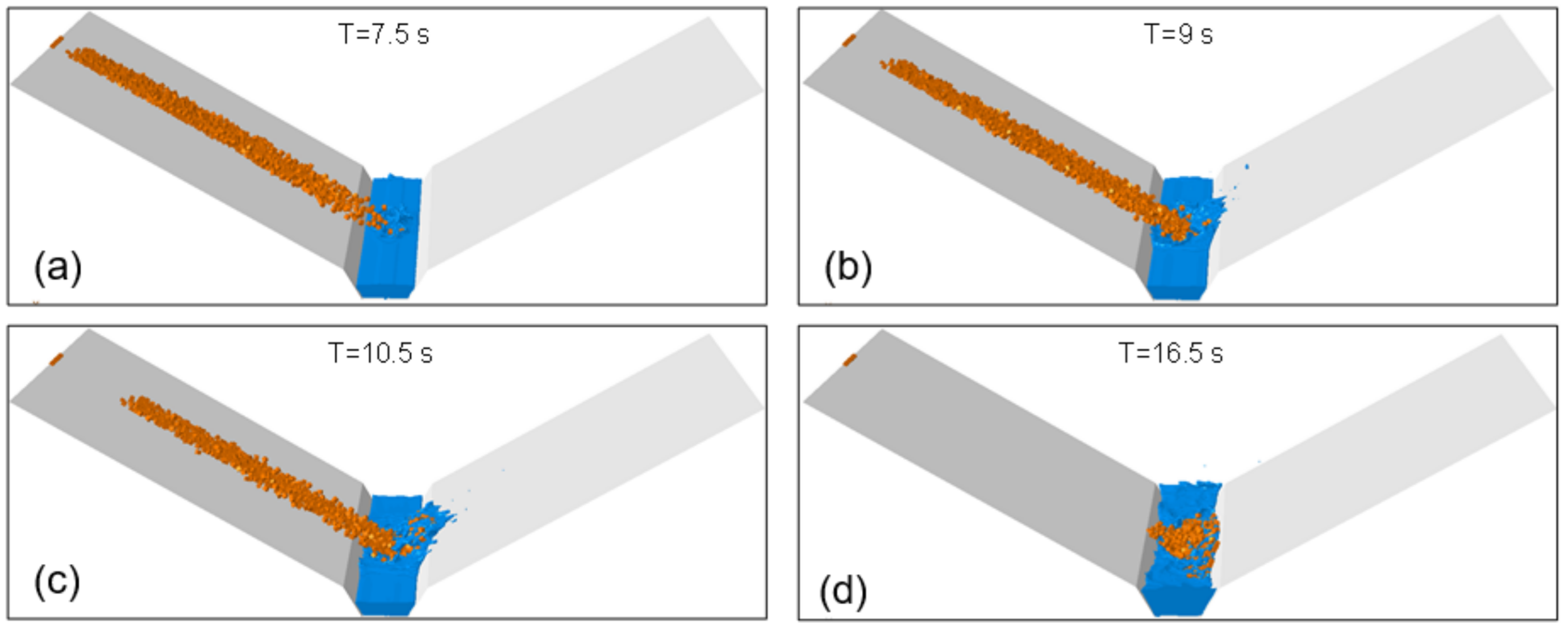
5.4. Effect of the Fracturing Degree of the Source Rock on the Formation of the Landslide Dam
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Costa, J.E.; Schuster, R.L. The formation and failure of natural dams. Geol. Soc. Am. Bull. 1988, 100, 1054–1068. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, W.; Cui, Z.; Li, W.; Wu, S.; Ma, J. Formation process of a large paleolandslide-dammed lake at Xuelongnang in the upper Jinsha River, SE Tibetan Plateau: Constraints from OSL and 14C dating. Landslides 2018, 15, 2399–2412. [Google Scholar] [CrossRef]
- Bao, Y.; Shai, S.; Chen, J.; Xu, P.; Sun, X.; Zhan, J.; Zhang, W.; Zhou, X. The evolution of the Samaoding paleolandslide river blocking event at the upstream reaches of the Jinsha River, Tibetan Plateau. Geomorphology 2020, 351, 106970. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Chen, J.; Soltanian, M.R.; Dai, Z.; WoldeGabriel, G. Mass-wasting-inferred dramatic variability of 130,000-year Indian summer monsoon intensity from deposits in the Southeast Tibetan Plateau. Geophys. Res. Lett. 2022, 49, e2021GL097301. [Google Scholar] [CrossRef]
- Chigira, M.; Wu, X.; Inokuchi, T.; Wang, G. Landslides induced by the 2008 Wenchuan earthquake, Sichuan, China. Geomorphology 2010, 118, 225–238. [Google Scholar] [CrossRef]
- Delaney, K.B.; Evans, S.G. The 2000 Yigong landslide (Tibetan Plateau), rockslide-dammed lake and outburst flood: Review, remote sensing analysis, and process modelling. Geomorphology 2015, 246, 377–393. [Google Scholar] [CrossRef]
- Liu, W.; Ju, N.; Zhang, Z.; Chen, Z.; He, S. Simulating the process of the Jinshajiang landslide-caused disaster chain in October 2018. Bull. Eng. Geol. Environ. 2020, 79, 2189–2199. [Google Scholar] [CrossRef]
- Hungr, O.; Evans, S.G. Entrainment of debris in rock avalanches: An analysis of a long runout mechanism. Geol. Soc. Am. Bull. 2004, 116, 1240–1252. [Google Scholar] [CrossRef]
- Bao, Y.; Han, X.; Chen, J.; Zhang, W.; Zhan, J.; Sun, X.; Chen, M. Numerical assessment of failure potential of a large mine waste dump in Panzhihua City, China. Eng. Geol. 2019, 253, 171–183. [Google Scholar] [CrossRef]
- Borykov, T.; Mège, D.; Mangeney, A.; Richard, R.; Gurgurewicz, J.; Lucas, A. Empirical investigation of friction weakening of ter-restrial and Martian landslides using discrete element models. Landslides 2019, 16, 1121–1140. [Google Scholar] [CrossRef] [Green Version]
- Heim, A. Bergsturz und Menschenleben (Landslides and Human Lives); Skermer, N., Translator; Bitech Press: Vancouver, BC, Canada, 1932. [Google Scholar]
- Staron, L.; Lajeunesse, E. Understanding how volume affects the mobility of dry debris flows. Geophys. Res. Lett. 2009, 36, 91–100. [Google Scholar] [CrossRef] [Green Version]
- Aaron, J.; McDougall, S. Rock avalanche mobility: The role of path material. Eng. Geol. 2019, 257, 105–126. [Google Scholar] [CrossRef]
- Ibañez, J.; Hatzor, Y. Rapid sliding and friction degradation: Lessons from the catastrophic Vajont landslide. Eng. Geol. 2018, 244, 96–106. [Google Scholar] [CrossRef]
- Fan, X.; Yang, F.; Siva Subramanian, S.; Xu, Q.; Feng, Z.; Mavrouli, O.; Peng, M.; Ouyang, C.; Jansen, J.D.; Huang, R. Prediction of a multi-hazard chain by an integrated numerical simulation approach: The Baige landslide, Jinsha River, China. Landslides 2020, 17, 147–164. [Google Scholar] [CrossRef]
- Tsou, C.; Feng, Z.; Chigira, M. Catastrophic landslide induced by Typhoon Morakot, Shiaolin, Taiwan. Geomorphology 2010, 127, 166–178. [Google Scholar] [CrossRef] [Green Version]
- Yin, Y.; Huang, B.; Chen, X.; Liu, G.; Wang, S. Numerical analysis on wave generated by the Qianjiangping landslide in Three Gorges Reservoir, China. Landslides 2015, 12, 355–364. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, F.; Yang, X.; Yang, Y.; Lu, P. Comprehensive analyses of the initiation and landslide-generated wave processes of the 24 June 2015 Hongyanzi landslide at the Three Gorges Reservoir, China. Landslides 2016, 13, 589–601. [Google Scholar] [CrossRef]
- Bowman, E.T.; Take, W.A.; Rait, K.L.; Hann, C. Physical models of rock avalanche spreading behaviour with dynamic frag-mentation. Can. Geotech. J. 2012, 49, 460–476. [Google Scholar] [CrossRef] [Green Version]
- Liao, H.; Yang, X.; Lu, G.; Tao, J.; Zhou, J. Experimental study on the formation of landslide dams by fragmentary materials from successive rock slides. Bull. Eng. Geol. Environ. 2020, 79, 1591–1604. [Google Scholar] [CrossRef]
- Bisantino, T.; Fischer, P.; Gentile, F. Rheological characteristics of debris-flow material in South-Gargano watersheds. Nat. Hazards 2009, 54, 209–223. [Google Scholar] [CrossRef]
- Pellegrino, A.M.; Anna, S.D.S.; Schippa, L. An integrated procedure to evaluate rheological parameters to model debris flows. Eng. Geol. 2015, 196, 88–98. [Google Scholar] [CrossRef]
- Kaczmarek, Ł.; Popielski, P. Selected components of geological structures and numerical modeling of slope stability. Open Geosci. 2019, 11, 208–218. [Google Scholar] [CrossRef]
- Lin, C.; Lin, M. Evolution of the large landslide induced by Typhoon Morakot: A case study in the Butangbunasi River, southern Taiwan using the discrete element method. Eng. Geol. 2015, 197, 172–187. [Google Scholar] [CrossRef]
- Lo, C.; Lin, M.; Tang, C.; Hu, C. A kinematic model of the Hsiaolin landslide calibrated to the morphology of the landslide deposit. Eng. Geol. 2011, 123, 22–39. [Google Scholar] [CrossRef]
- Chen, K.; Wu, J. Simulating the failure process of the Xinmo landslide using discontinuous deformation analysis. Eng. Geol. 2018, 239, 269–281. [Google Scholar] [CrossRef]
- Do, T.; Wu, J. Simulating a mining-triggered rock avalanche using DDA: A case study in Nattai North, Australia. Eng. Geol. 2020, 264, 105386. [Google Scholar] [CrossRef]
- Sosio, R.; Crosta, G.B.; Hungr, O. Complete dynamic modeling calibration for the Thurwieser rock avalanche (Italian central alps). Eng. Geol. 2008, 100, 11–26. [Google Scholar] [CrossRef]
- Pastor, M.; Blanc, T.; Haddad, B.; Petrone, S.; Sanchez Morles, M.; Drempetic, V.; Issler, D.; Crosta, G.B.; Cascini, L.; Sorbino, G.; et al. Application of a SPH depth-integrated model to landslide run-out analysis. Landslides 2014, 11, 731–812. [Google Scholar] [CrossRef] [Green Version]
- Llano-Serna, M.A.; Farias, M.M.; Pedroso, D.M. An assessment of the material point method for modelling large scale runout processes in landslides. Landslides 2016, 13, 1057–1066. [Google Scholar] [CrossRef]
- Ouyang, C.; An, H.; Zhou, S.; Wang, Z.; Su, P.; Wang, D.; Cheng, D.; She, J. Insights from the failure and dynamic characteristics of two sequential landslides at Baige village along the Jinsha River, China. Landslides 2019, 16, 1397–1414. [Google Scholar] [CrossRef]
- Scaringi, G.; Fan, X.; Xu, Q.; Liu, C.; Ouyang, C.; Domènech, G.; Yang, F.; Dai, L. Some considerations on the use of numerical methods to simulate past landslides and possible new failures: The case of the recent Xinmo landslide (Sichuan, China). Landslides 2018, 15, 1359–1375. [Google Scholar]
- Huang, Y.; Zhu, C. Simulation of flow slides in municipal solid waste dumps using a modified MPS method. Nat. Hazards 2014, 74, 491–508. [Google Scholar] [CrossRef]
- Zhu, C.; Chen, Z.; Huang, Y. Coupled moving particle simulation-finite-element method analysis of fluid-structure interaction in geodisasters. Int. J. Geomech. 2021, 21, 04021081. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, K. Analysis of the impact force of debris flows on a check dam by using a coupled Eulerian-Lagrangian (CEL) method. Comput. Geotech. 2019, 116, 103214. [Google Scholar] [CrossRef]
- Koshizuka, S.; Oka, Y.; Tamako, H. A Particle Method for Calculating Splashing of Incompressible Viscous Fluid; American Nuclear Society, Inc.: La Grange Park, IL, USA, 1995. [Google Scholar]
- Tan, H.; Chen, S. A hybrid DEM-SPH model for deformable landslide and its generated surge waves. Adv. Water Resour. 2017, 108, 256–276. [Google Scholar] [CrossRef]
- Zhang, W.; Lan, Z.; Ma, Z.; Tan, C.; Que, J.; Wang, F.; Cao, C. Determination of statistical discontinuity persistence for a rock mass characterized by non-persistent fractures. Int. J. Rock Mech. Min. Sci. 2020, 126, 104177. [Google Scholar] [CrossRef]
- Xi, X.; Yang, S.; McDermott, C.; Shipton, Z.; Fraser-Harris, A.; Edlmann, K. Modelling rock fracture induced by hydraulic pulses. Rock Mech. Rock Eng. 2021, 54, 3977–3994. [Google Scholar] [CrossRef]
- Ma, G.; Zhou, W.; Ng, T.; Cheng, Y.; Chang, X. Microscopic modeling of the creep behavior of rockfills with a delayed particle breakage model. Acta Geotech. 2015, 10, 481–496. [Google Scholar] [CrossRef]
- Ditoro, G.; David, L.G.; Terry, E.T. Friction falls towards zero in quartz rock as slip velocity approaches seismic rates. Nature 2004, 427, 436–439. [Google Scholar] [CrossRef]
- Han, R.; Shimamoto, T.; Hirose, T.; Ree, J.; Ando, J. Ultralow friction of carbonate faults caused by thermal decomposition. Science 2007, 316, 878–881. [Google Scholar] [CrossRef] [Green Version]
- McDougall, S. 2014 Canadian Geotechnical Colloquium: Landslide runout analysis—Current practice and challenges. Can. Geotech. J. 2017, 54, 605–620. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Huang, R.; McSaveney, M.; Yao, L.; Xu, Q.; Feng, M.; Zhang, X. Superheated steam, hot CO2 and dynamic recrys-tallization from frictional heat jointly lubricated a giant landslide: Field and experimental evidence. Earth Planet. Sci. Lett. 2019, 510, 85–93. [Google Scholar] [CrossRef]
- Davies, T.R.; McSaveney, M.J. Runout of dry granular avalanches. Can. Geotech. J. 1999, 36, 313–320. [Google Scholar] [CrossRef]
- Johnson, B.C.; Campbell, C.S. Drop height and volume control the mobility of long-runout landslides on the Earth and Mars. Geophys. Res. Lett. 2017, 44, 12091–12097. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Yin, Y.; Du, C. Risk management study on impulse waves generated by Hongyanzi landslide in Three Gorges Reservoir of China on June 24, 2015. Landslides 2016, 13, 603–616. [Google Scholar] [CrossRef]
- Masson, S.; Martinez, J. Effect of particle mechanical properties on silo flow and stresses from distinct element simulations. Powder Technol. 2000, 109, 164–178. [Google Scholar] [CrossRef]
- Wiacek, J.; Molenda, M.; Ooi, J.Y.; Favier, J.F. Experimental and numerical determination of representative elementary volume for granular plant materials. Granul. Matter 2012, 14, 449–456. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.D.; Ye, P.; Wu, Y.J.; Zhai, E.C. Experimental study on simultaneous heat-water-salt migration of bare soil subjected to evaporation. J. Hydrol. 2022, 609, 127710. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Parameters | ||||
|---|---|---|---|---|---|
| Water | (kg/m3) | (m/s) | (Pa·s) | ||
| 1000 | 1500 | 0 | 0 | 0.001 | |
| Glass tank | (kg/m3) | E (MPa) | f | / | |
| 1800 | 78,500 | 0.3 | 0.001 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, Y.; Chen, J.; Zhang, W.; Li, Y.; Li, Z.; Du, N. Effect of the Fracturing Degree of the Source Rock on Rock Avalanche River-Blocking Behavior Based on the Coupled Eulerian-Lagrangian Technique. Minerals 2022, 12, 901. https://0-doi-org.brum.beds.ac.uk/10.3390/min12070901
Bao Y, Chen J, Zhang W, Li Y, Li Z, Du N. Effect of the Fracturing Degree of the Source Rock on Rock Avalanche River-Blocking Behavior Based on the Coupled Eulerian-Lagrangian Technique. Minerals. 2022; 12(7):901. https://0-doi-org.brum.beds.ac.uk/10.3390/min12070901
Chicago/Turabian StyleBao, Yiding, Jianping Chen, Weifeng Zhang, Yuchao Li, Zhihai Li, and Ni Du. 2022. "Effect of the Fracturing Degree of the Source Rock on Rock Avalanche River-Blocking Behavior Based on the Coupled Eulerian-Lagrangian Technique" Minerals 12, no. 7: 901. https://0-doi-org.brum.beds.ac.uk/10.3390/min12070901