
A NIR-Light-Driven Twisted and Coiled Polymer Actuator with a PEDOT-Tos/Nylon-6 Composite for Durable and Remotely Controllable Artificial Muscle



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Experimental Section
2.1. Materials
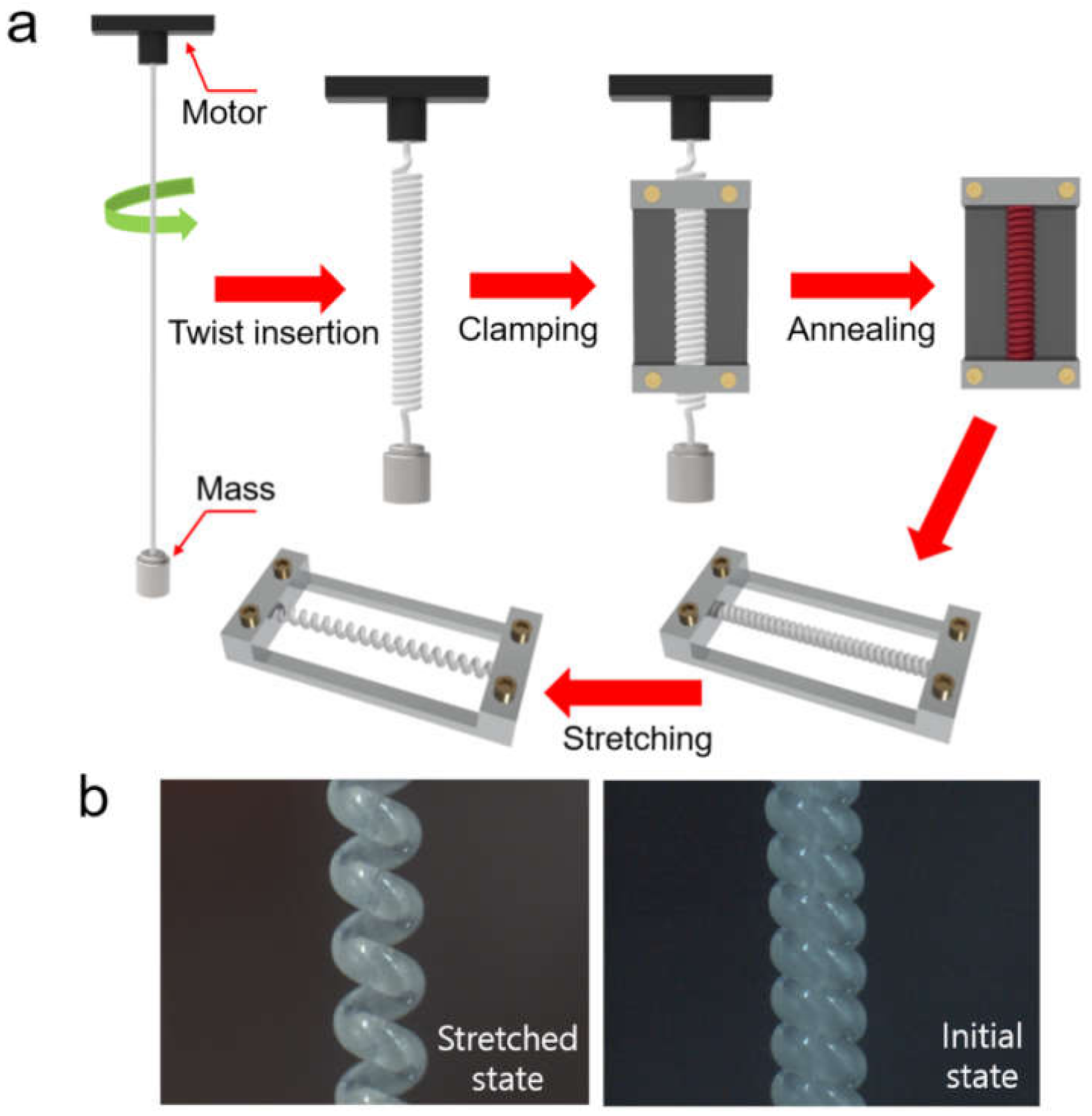
2.2. Structural Forming of a Twisted and Coiled Nylon-6 Fiber
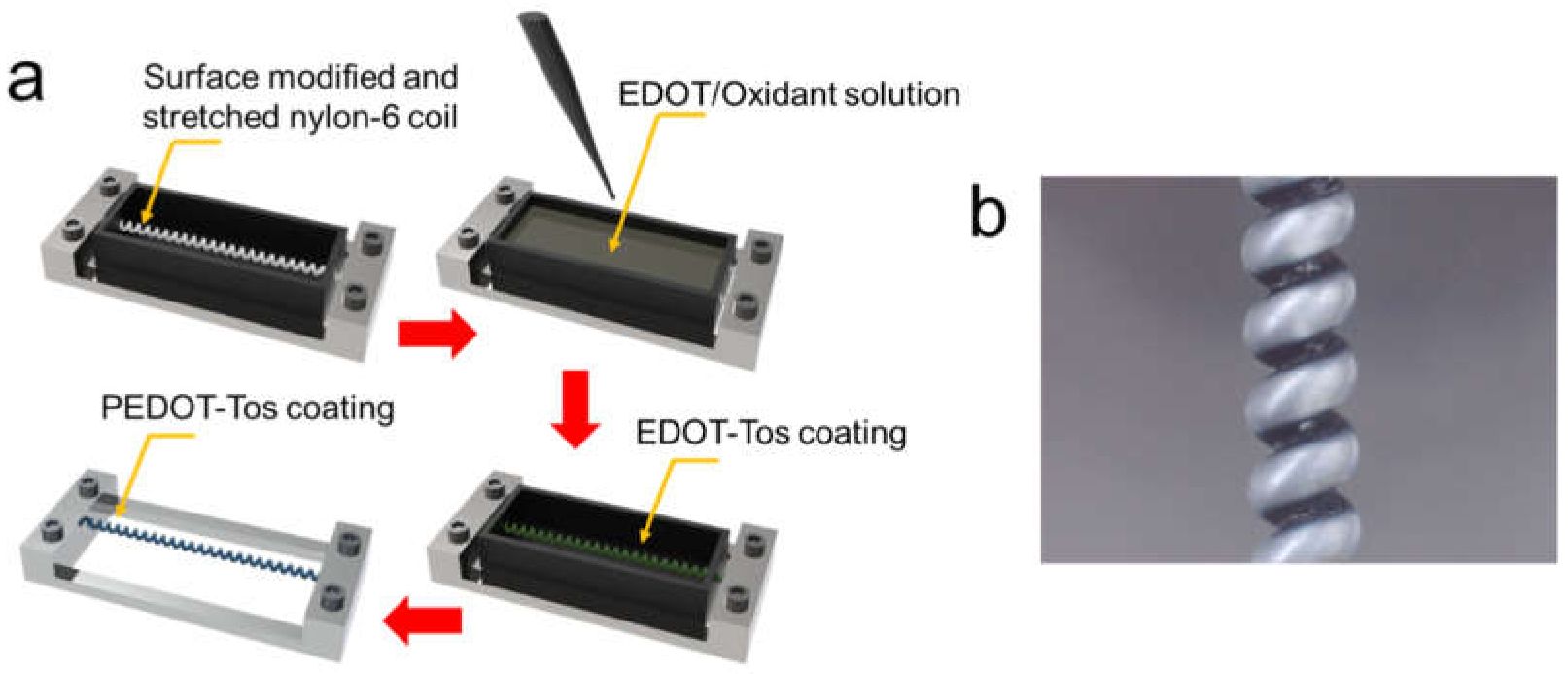
2.3. Preparation of PEDOT-Tos Coated TCN
2.4. Characterization
2.5. Performance Test
3. Results and Discussion
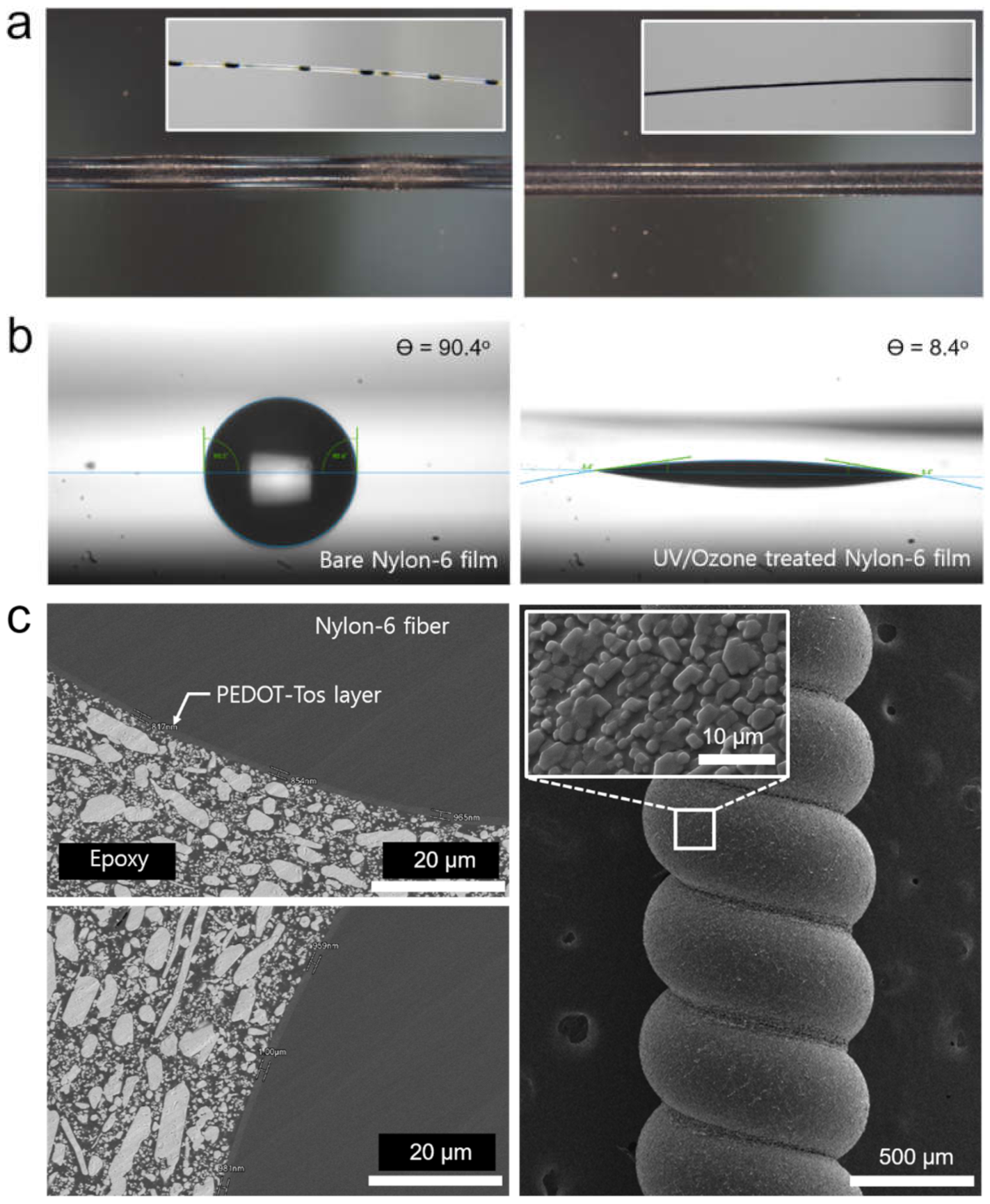
3.1. Constructing PEDOT-Tos Layer on Nylon-6 Material
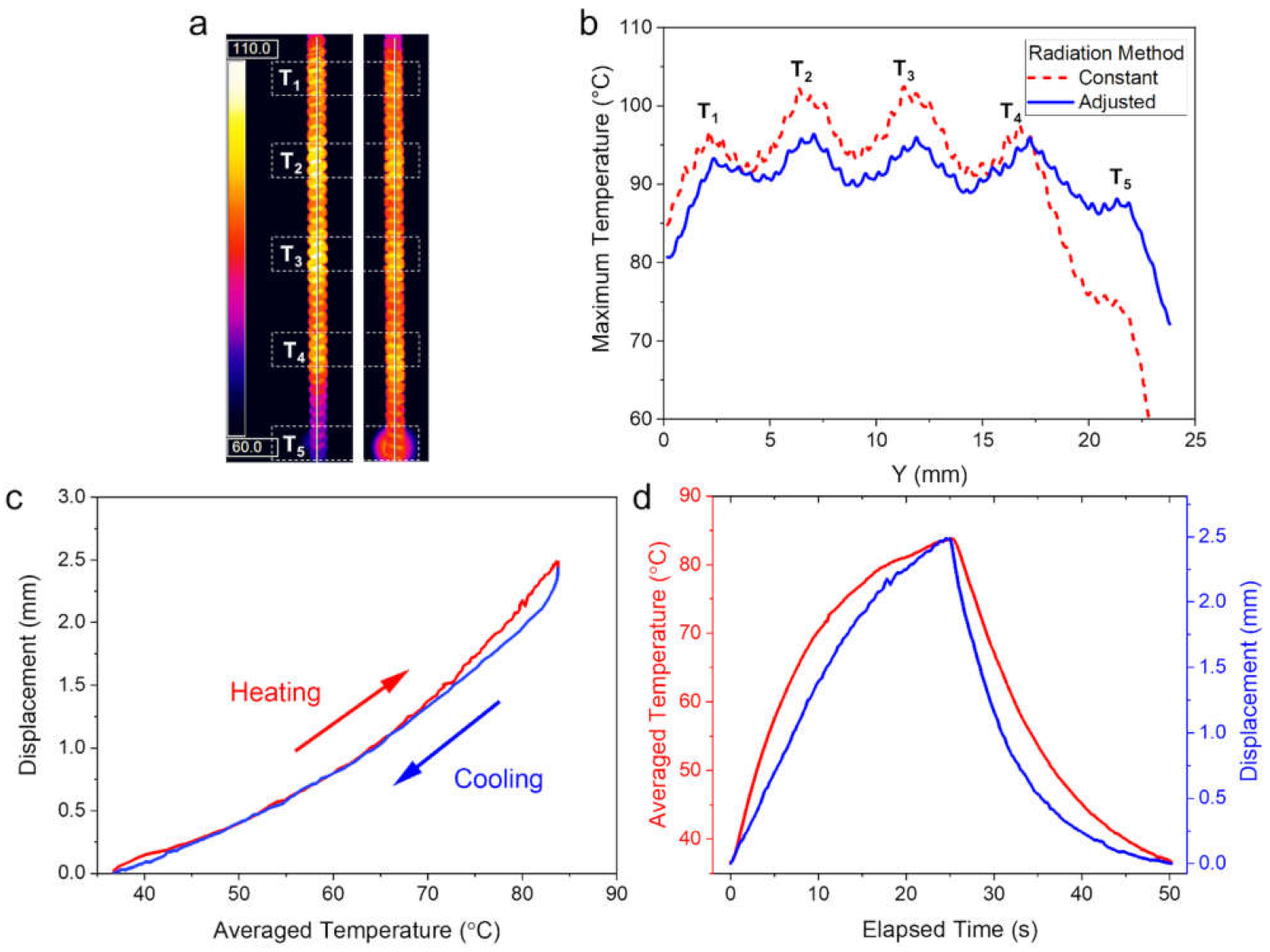
3.2. Photo-Thermal Heating Characteristics of the PEDOT-Tos Layer on TCN Structure
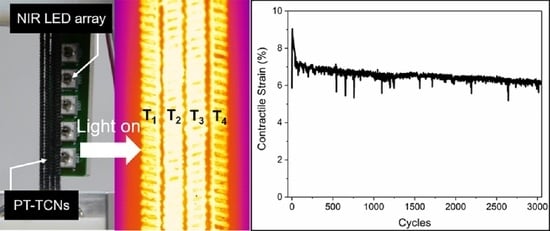
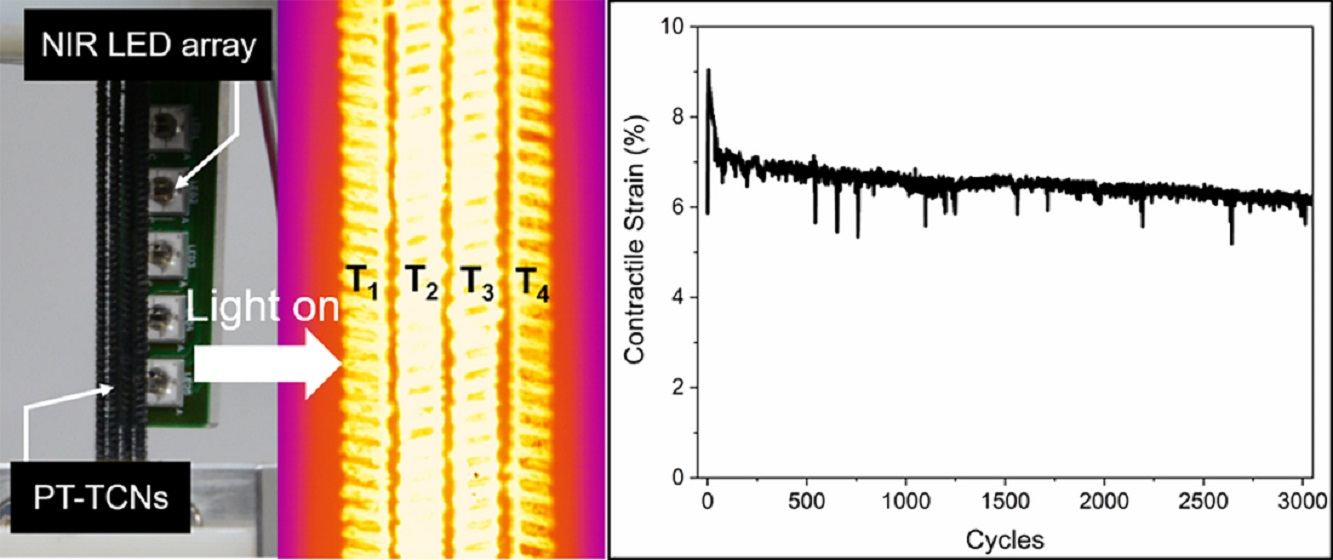
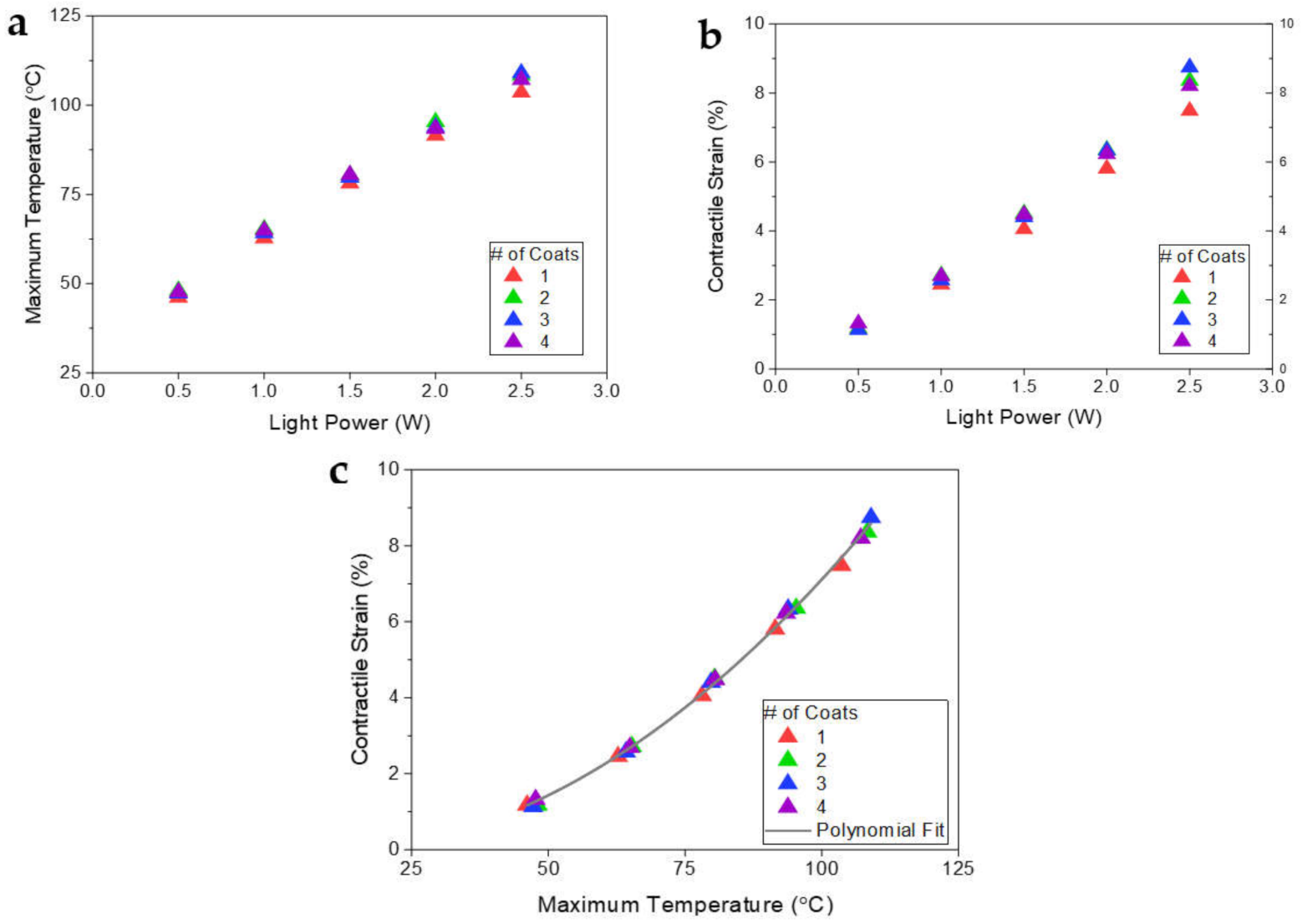
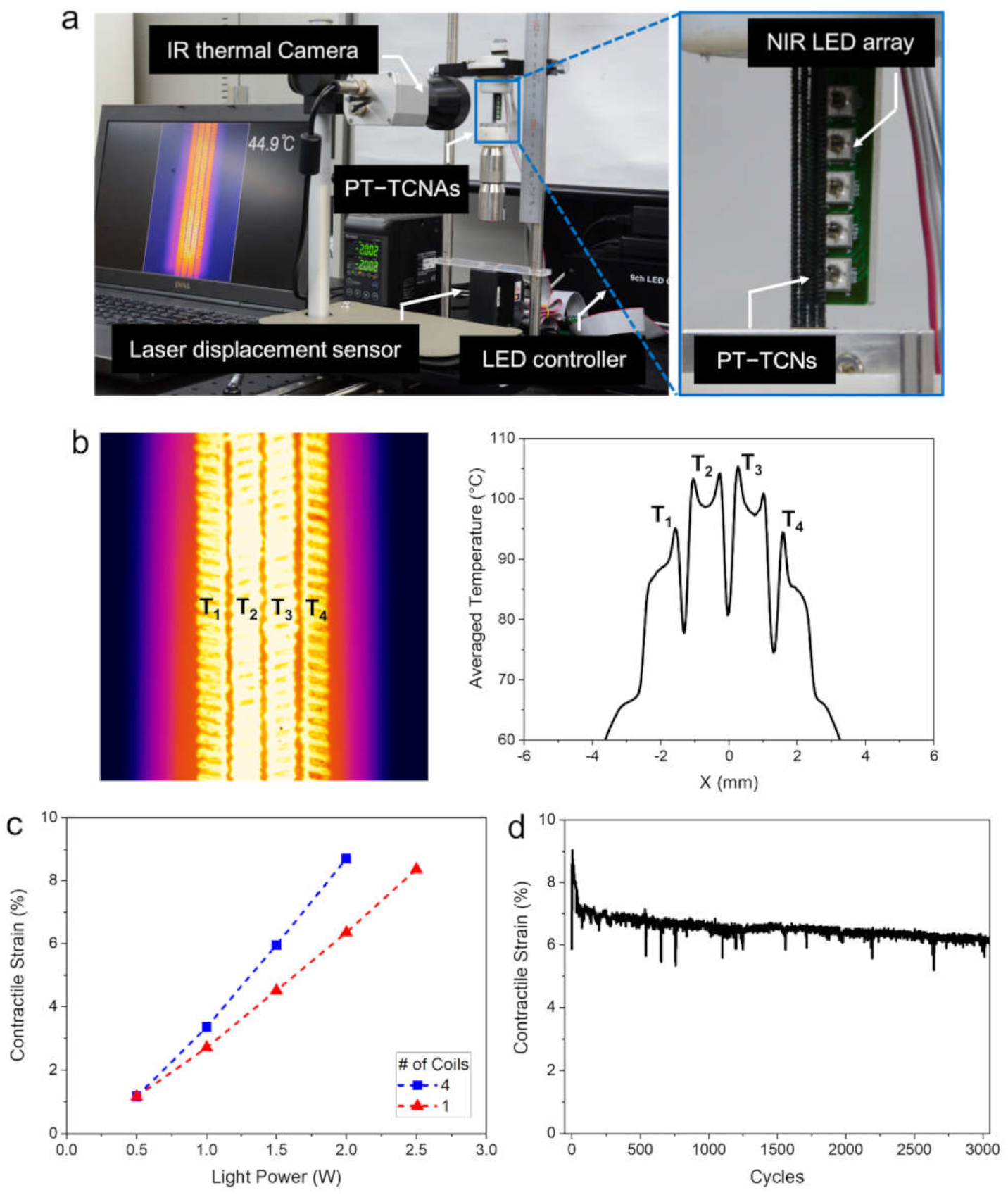
3.3. Actuation Performance of the PT-TCNA
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zou, M.; Li, S.; Hu, X.; Leng, X.; Wang, R.; Zhou, X.; Liu, Z. Progresses in Tensile, Torsional, and Multifunctional Soft Actuators. Adv. Funct. Mater. 2021, 31, 2007437. [Google Scholar] [CrossRef]
- Chen, Q.; Yu, X.; Pei, Z.; Yang, Y.; Wei, Y.; Ji, Y. Multi-Stimuli Responsive and Multi-Functional Oligoaniline-Modified Vitrimers. Chem. Sci. 2017, 8, 724–733. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.; Gutierrez, M.P.; Lee, L.P. Reversible Self-Actuated Thermo-Responsive Pore Membrane. Sci. Rep. 2016, 6, 39402. [Google Scholar] [CrossRef]
- Chen, L.; Weng, M.; Zhang, W.; Zhou, Z.; Zhou, Y.; Xia, D.; Li, J.; Huang, Z.; Liu, C.; Fan, S. Transparent Actuators and Robots Based on Single-Layer Superaligned Carbon Nanotube Sheet and Polymer Composites. Nanoscale 2016, 8, 6877–6883. [Google Scholar] [CrossRef]
- Gao, D.; Ding, W.; Nieto-Vesperinas, M.; Ding, X.; Rahman, M.; Zhang, T.; Lim, C.; Qiu, C.-W. Optical Manipulation from the Microscale to the Nanoscale: Fundamentals, Advances and Prospects. Light Sci. Appl. 2017, 6, e17039. [Google Scholar] [CrossRef] [PubMed]
- Gelebart, A.H.; Jan Mulder, D.; Varga, M.; Konya, A.; Vantomme, G.; Meijer, E.W.; Selinger, R.L.B.; Broer, D.J. Making Waves in a Photoactive Polymer Film. Nature 2017, 546, 632–636. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Q.; Dunlop, J.W.C.; Qiu, X.; Huang, F.; Zhang, Z.; Heyda, J.; Dzubiella, J.; Antonietti, M.; Yuan, J. An Instant Multi-Responsive Porous Polymer Actuator Driven by Solvent Molecule Sorption. Nat. Commun. 2014, 5, 4293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, Y.-L.; Dong, W.-F.; Niu, L.-G.; Jiang, T.; Liu, D.-X.; Zhang, L.; Wang, Y.-S.; Chen, Q.-D.; Kim, D.-P.; Sun, H.-B. Protein-Based Soft Micro-Optics Fabricated by Femtosecond Laser Direct Writing. Light Sci. Appl. 2014, 3, e129. [Google Scholar] [CrossRef]
- Li, Q.; Liu, C.; Lin, Y.-H.; Liu, L.; Jiang, K.; Fan, S. Large-Strain, Multiform Movements from Designable Electrothermal Actuators Based on Large Highly Anisotropic Carbon Nanotube Sheets. ACS Nano 2015, 9, 409–418. [Google Scholar] [CrossRef]
- Amjadi, M.; Sitti, M. High-Performance Multiresponsive Paper Actuators. ACS Nano 2016, 10, 10202–10210. [Google Scholar] [CrossRef] [PubMed]
- Fusco, S.; Sakar, M.S.; Kennedy, S.; Peters, C.; Bottani, R.; Starsich, F.; Mao, A.; Sotiriou, G.A.; Pané, S.; Pratsinis, S.E.; et al. An Integrated Microrobotic Platform for On-Demand, Targeted Therapeutic Interventions. Adv. Mater. 2014, 26, 952–957. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-Scale Soft-Bodied Robot with Multimodal Locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Han, D.-D.; Zhang, Y.-L.; Liu, Y.; Liu, Y.-Q.; Jiang, H.-B.; Han, B.; Fu, X.-Y.; Ding, H.; Xu, H.-L.; Sun, H.-B. Bioinspired Graphene Actuators Prepared by Unilateral UV Irradiation of Graphene Oxide Papers. Adv. Funct. Mater. 2015, 25, 4548–4557. [Google Scholar] [CrossRef]
- Seok, S.; Onal, C.D.; Cho, K.-J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A Peristaltic Soft Robot with Antagonistic Nickel Titanium Coil Actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 1485–1497. [Google Scholar] [CrossRef]
- Lin, H.-T.; Leisk, G.G.; Trimmer, B. GoQBot: A Caterpillar-Inspired Soft-Bodied Rolling Robot. Bioinspiration Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef] [PubMed]
- Onal, C.D.; Rus, D. Autonomous Undulatory Serpentine Locomotion Utilizing Body Dynamics of a Fluidic Soft Robot. Bioinspiration Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef]
- Steltz, E.; Mozeika, A.; Rodenberg, N.; Brown, E.; Jaeger, H.M. JSEL: Jamming Skin Enabled Locomotion. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 5672–5677. [Google Scholar] [CrossRef] [Green Version]
- Tolley, M.T.; Shepherd, R.F.; Karpelson, M.; Bartlett, N.W.; Galloway, K.C.; Wehner, M.; Nunes, R.; Whitesides, G.M.; Wood, R.J. An Untethered Jumping Soft Robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 561–566. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A Novel Type of Compliant and Underactuated Robotic Hand for Dexterous Grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A Bending Pneumatic Rubber Actuator Realizing Soft-Bodied Manta Swimming Robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 4975–4980. [Google Scholar] [CrossRef]
- Nakabo, Y.; Mukai, T.; Ogawa, K.; Ohnishi, N.; Asaka, K. Biomimetic soft robot using artificial muscle. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2004), Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Ogawa, K.; Nakabo, Y.; Mukai, T.; Asaka, K.; Ohnishi, N. A snake-like swimming artificial muscle. In Proceedings of the Second Conference on Artificial Muscles, Osaka, Japan, 20–21 May 2004. [Google Scholar]
- Leng, X.; Hu, X.; Zhao, W.; An, B.; Zhou, X.; Liu, Z. Recent Advances in Twisted-Fiber Artificial Muscles. Adv. Intell. Syst. 2021, 3, 2000185. [Google Scholar] [CrossRef]
- Shi, Q.; Li, J.; Hou, C.; Shao, Y.; Zhang, Q.; Li, Y.; Wang, H. A Remote Controllable Fiber-Type near-Infrared Light-Responsive Actuator. Chem. Commun. 2017, 53, 11118–11121. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Xiang, C.; Sun, D.; Li, M.; Yan, K.; Wang, D. Photothermal and Moisture Actuator Made with Graphene Oxide and Sodium Alginate for Remotely Controllable and Programmable Intelligent Devices. ACS Appl. Mater. Interfaces 2019, 11, 21926–21934. [Google Scholar] [CrossRef] [PubMed]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; de Andrade, M.J.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.A.; Park, S.H.; Baek, J.H.; Ko, Y.D.; Lee, H.S.; Cho, K.; Lee, J.Y.; Lee, D.R.; Cho, J.H. Selectively Patterned Highly Conductive Poly(3,4-Ethylenedioxythiophene)-Tosylate Electrodes for High Performance Organic Field-Effect Transistors. Appl. Phys. Lett. 2009, 95, 233509. [Google Scholar] [CrossRef] [Green Version]
- Lim, H.; Park, T.; Na, J.; Park, C.; Kim, B.; Kim, E. Construction of a Photothermal Venus Flytrap from Conductive Polymer Bimorphs. NPG Asia Mater. 2017, 9, e399. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Lee, M.S.; Wakida, T.; Tokuyama, T.; Inoue, G.; Ishida, S.; Itazu, T.; Miyaji, Y. Chemical Modification of Nylon 6 and Polyester Fabrics by Ozone-Gas Treatment. J. Appl. Polym. Sci. 2006, 100, 1344–1348. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, H.J.; Mun, S.; Yun, S.; Kang, T.J. A Light-Driven Vibrotactile Actuator with a Polymer Bimorph Film for Localized Haptic Rendering. ACS Appl. Mater. Interfaces 2021, 13, 6597–6605. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, I.; Mun, S.; Shin, H.; Yun, S. A NIR-Light-Driven Twisted and Coiled Polymer Actuator with a PEDOT-Tos/Nylon-6 Composite for Durable and Remotely Controllable Artificial Muscle. Polymers 2022, 14, 432. https://0-doi-org.brum.beds.ac.uk/10.3390/polym14030432
Hwang I, Mun S, Shin H, Yun S. A NIR-Light-Driven Twisted and Coiled Polymer Actuator with a PEDOT-Tos/Nylon-6 Composite for Durable and Remotely Controllable Artificial Muscle. Polymers. 2022; 14(3):432. https://0-doi-org.brum.beds.ac.uk/10.3390/polym14030432
Chicago/Turabian StyleHwang, Inwook, Seongcheol Mun, Hyungcheol Shin, and Sungryul Yun. 2022. "A NIR-Light-Driven Twisted and Coiled Polymer Actuator with a PEDOT-Tos/Nylon-6 Composite for Durable and Remotely Controllable Artificial Muscle" Polymers 14, no. 3: 432. https://0-doi-org.brum.beds.ac.uk/10.3390/polym14030432