
Sliding Mode Observer-Based Fault Detection and Isolation Approach for a Wind Turbine Benchmark

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Wind Turbine Model
2.1.1. Blade and Pitch Model
2.1.2. Drive Train Model
2.1.3. Generator and Converter Model
2.2. Sliding Mode Observer
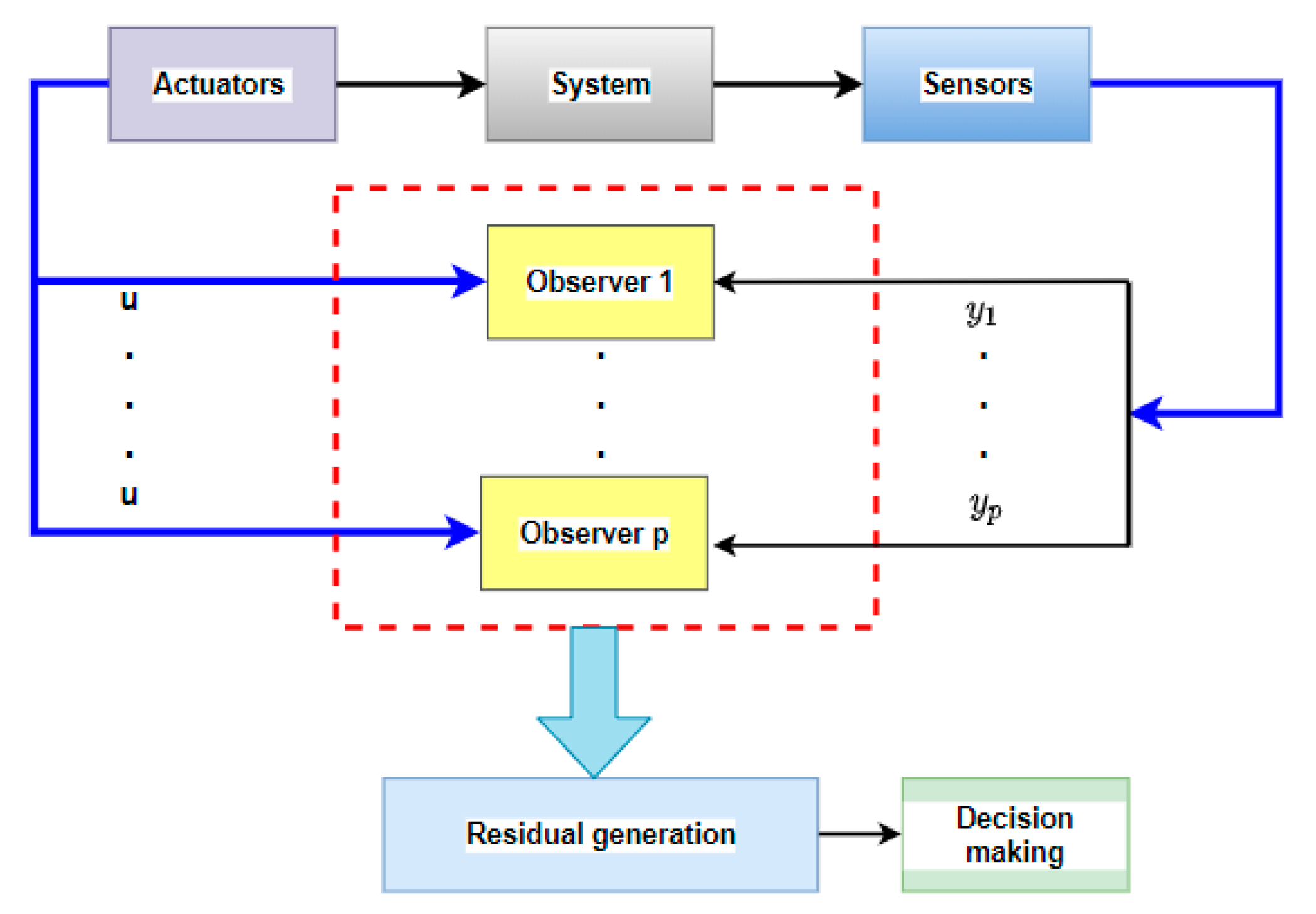
2.3. FDI Scheme Based on Sliding Mode Observers
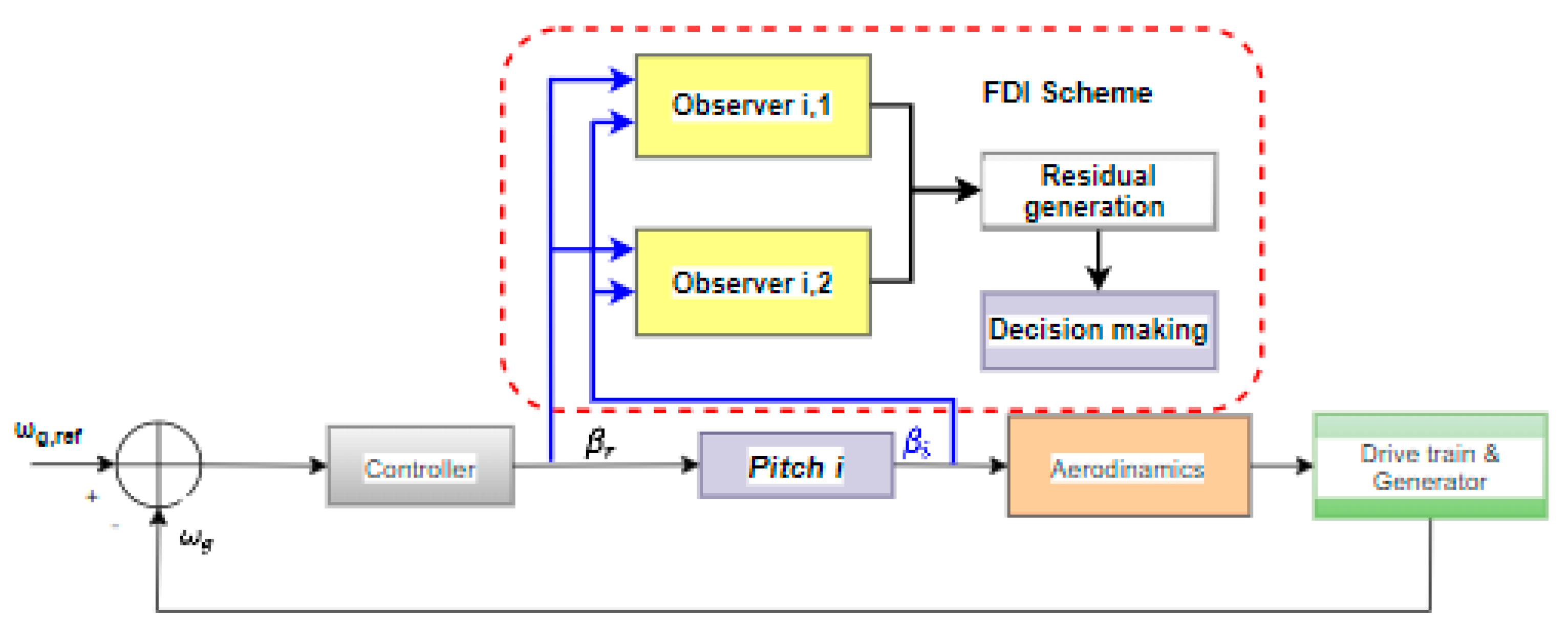
2.3.1. FDI Architecture for Pitch System
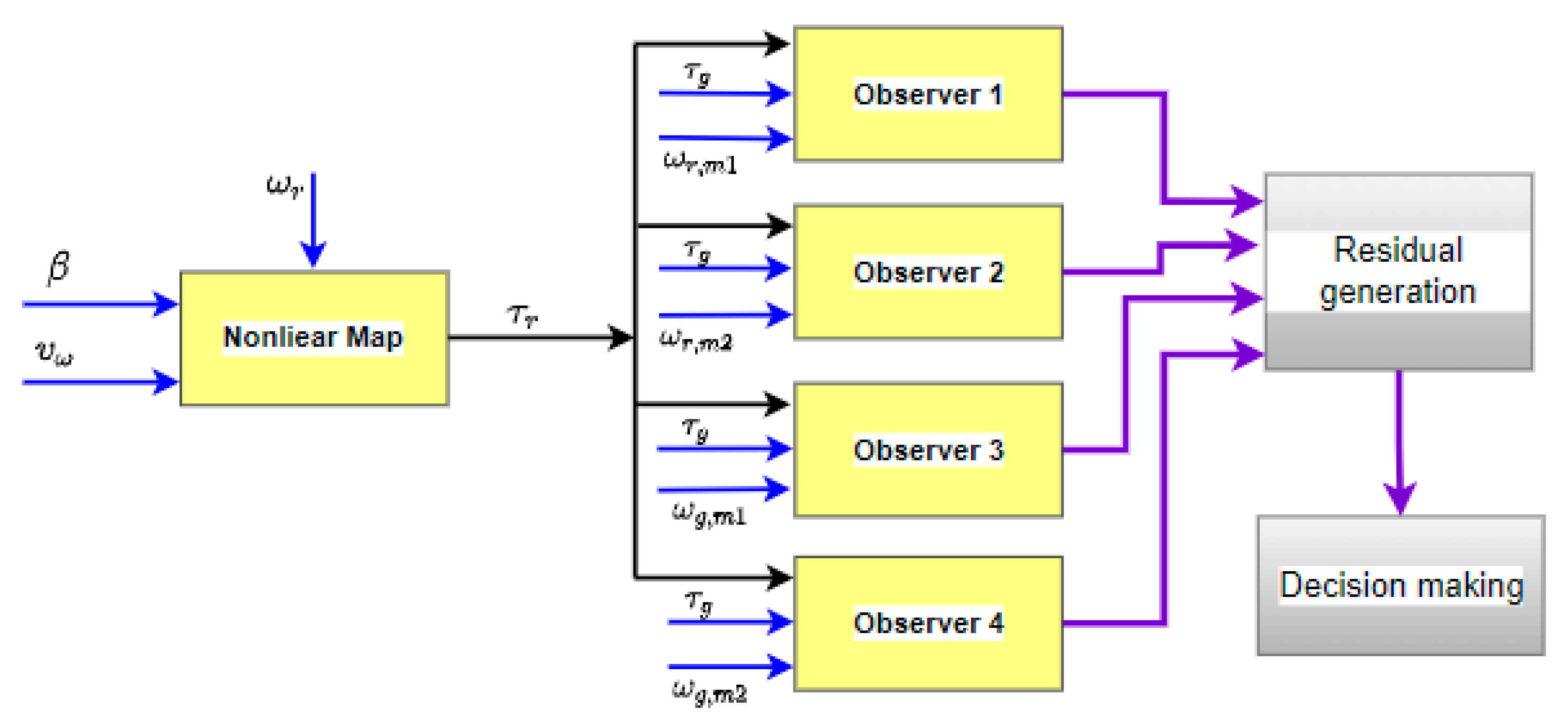
2.3.2. FDI Configurations for Drive Train System
3. Results
- •
- First fault: this fault is present at the first pitch system in sensor 1 and outcome in a fixed value: at time 2000–2100 s.
- •
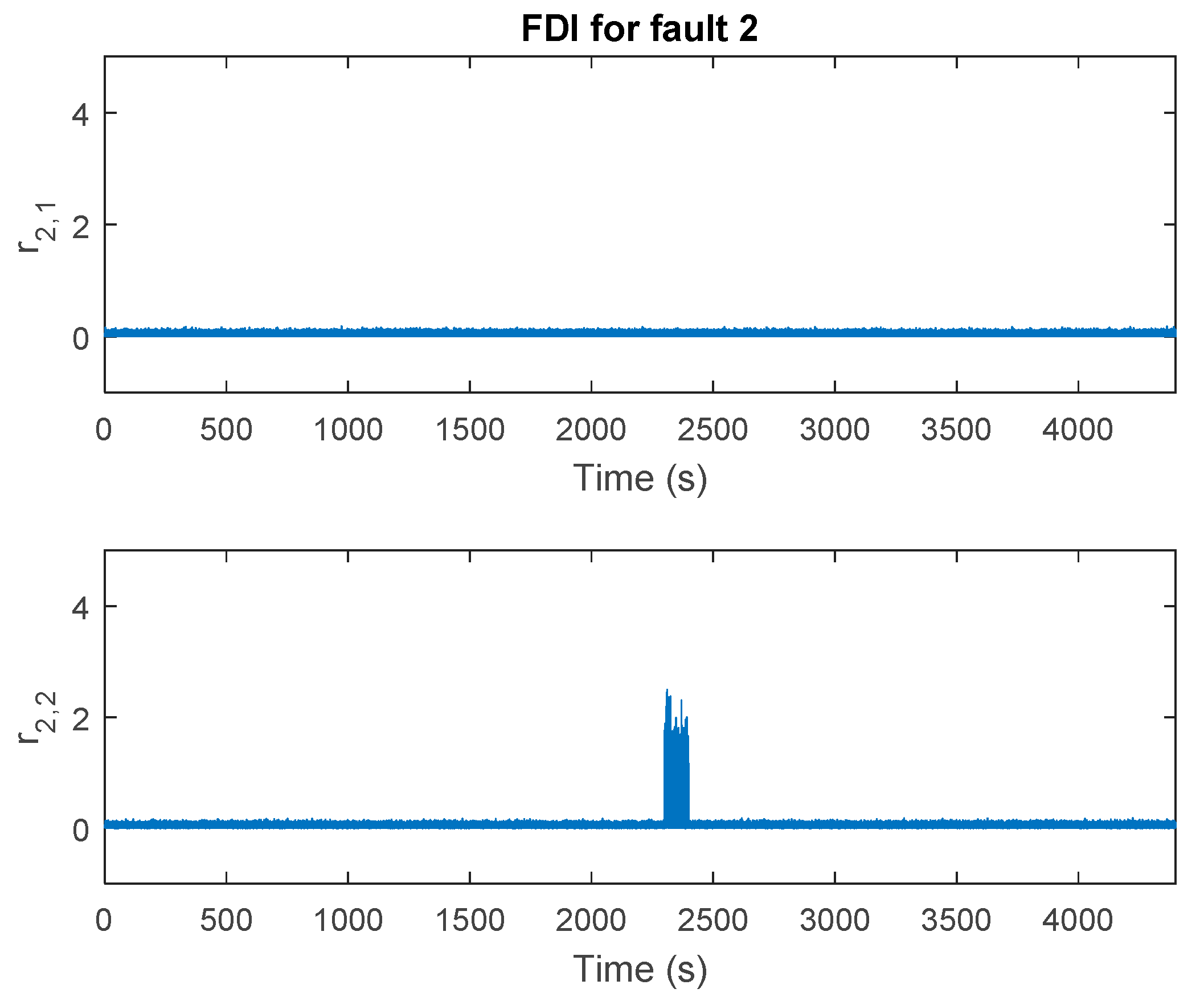
- Second fault: the sensor 2 in second pitch system is faulty and outcomes in a gain factor on the measurements: at time 2300–2400 s.
- •
- Third fault: the sensor 1 in third pitch system is faulty and outcomes in a fixed value: at time 2600–2700 s.
- •
- Fourth fault: the rotor speed sensor signal is faulty and outcomes in a fixed value: at time 1500–1600 s.
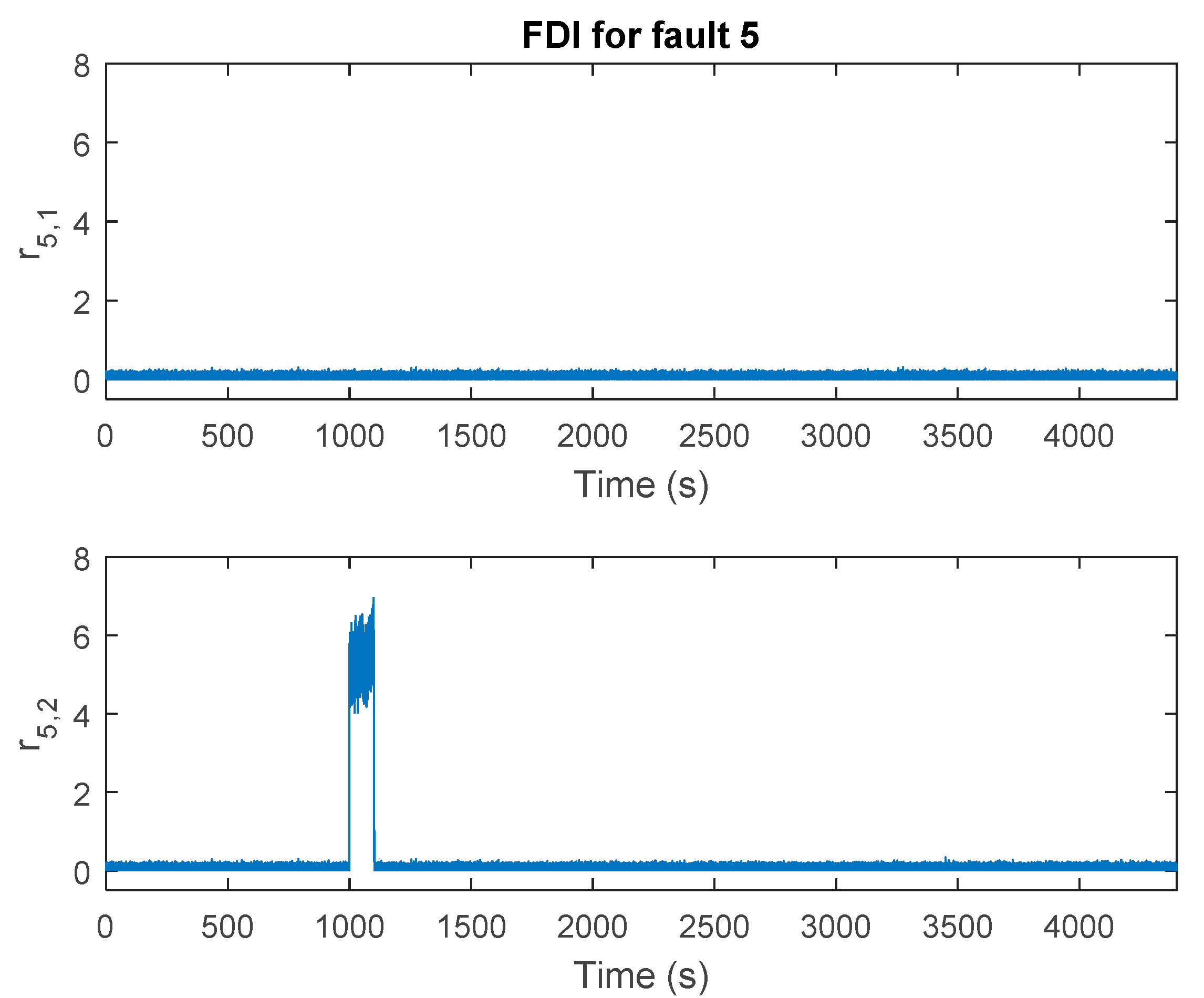
- •
- Fifth fault: the generator speed sensor signal is faulty and outcomes in a gain factor on the measurements: at time 1000–1100 s.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| System matrix | |
| Input matrix | |
| Output matrix | |
| Distribution matrix | |
| Estimation error | |
| Viscous friction | |
| Observer gain | |
| Torsion damping coefficient | |
| Moment of inertia | |
| Torsion stiffness | |
| Gear ratio | |
| Power | |
| Rotor ratio | |
| Residual signal | |
| Power coefficient | |
| Change of Coordinates Matrix | |
| Wind speed | |
| Discontinue function | |
| System states | |
| Estimate of | |
| Output system | |
| Estimate of y | |
| a known function | |
| Pitch angle | |
| Cutoff frequency | |
| Damping coefficient | |
| Efficiency | |
| Torsion angle | |
| Tip speed ratio | |
| Bounded uncertainty | |
| Wind density | |
| Scalar | |
| Torque | |
| Natural frequency | |
| Speed | |
| Subscripts | |
| Drive train | |
| Generator | |
| Linear | |
| Nonlinear | |
| Pitch blade | |
| Rotor | |
| Reference | |
| Wind |
References
- Sawant, M.; Thakare, S.; Rao, A.; Feijóo-Lorenzo, A.; Bokde, N. A Review on State-of-the-Art Reviews in Wind-Turbine- and Wind-Farm-Related Topics. Energies 2021, 14, 2041. [Google Scholar] [CrossRef]
- Mazzeo, D.; Matera, N.; De Luca, P.; Baglivo, C.; Congedo, P.M.; Oliveti, G. A literature review and statistical analysis of photovoltaic-wind hybrid renewable system research by considering the most relevant 550 articles: An upgradable matrix literature database. J. Clean. Prod. 2021, 295, 126070. [Google Scholar] [CrossRef]
- Pfaffel, S.; Faulstich, S.; Rohrig, K. Performance and Reliability of Wind Turbines: A Review. Energies 2017, 10, 1904. [Google Scholar] [CrossRef] [Green Version]
- Márquez, F.P.G.; Tobias, A.M.; Pérez, J.M.P.; Papaelias, M. Condition monitoring of wind turbines: Techniques and methods. Renew. Energy 2012, 46, 169–178. [Google Scholar] [CrossRef]
- Bianchi, F.D.; De Battista, H.; Mantz, R.J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer: London, UK, 2007; Volume 19. [Google Scholar]
- Alaskari, M.; Abdullah, O.; Majeed, M.H. Analysis of Wind Turbine Using QBlade Software. IOP Conf. Series Mater. Sci. Eng. 2019, 518, 032020. [Google Scholar] [CrossRef]
- Raut, S. Simulation of Micro Wind Turbine Blade in Q-Blade. Int. J. Res. Appl. Sci. Eng. Technol. 2017, 5, 256–262. [Google Scholar] [CrossRef]
- Chaudhary, M.; Roy, A. Design & optimization of a small wind turbine blade for operation at low wind speed. World J. Eng. 2015, 12, 83–94. [Google Scholar] [CrossRef]
- Liu, J.; Yao, Q.; Hu, Y. Model predictive control for load frequency of hybrid power system with wind power and thermal power. Energy 2019, 172, 555–565. [Google Scholar] [CrossRef]
- Chen, J.; Patton, R.J. Robust Model-Based Fault Diagnosis for Dynamic Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999; Volume 11. [Google Scholar]
- Luo, G.; Hurwitz, J.; Habetler, T.G. A survey of multi-sensor systems for online fault detection of electric machines. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; pp. 338–343. [Google Scholar]
- Janssens, O.; Loccufier, M.; Van Hoecke, S. Thermal Imaging and Vibration-Based Multisensor Fault Detection for Rotating Machinery. IEEE Trans. Ind. Inform. 2019, 15, 434–444. [Google Scholar] [CrossRef] [Green Version]
- Luwei, K.C.; Yunusa-Kaltungo, A.; Sha’Aban, Y.A. Integrated fault detection framework for classifying rotating machine faults using frequency domain data fusion and Artificial Neural Networks. Machines 2018, 6, 59. [Google Scholar] [CrossRef] [Green Version]
- Yunusa-Kaltungo, A.; Cao, R. Towards Developing an Automated Faults Characterisation Framework for Rotating Machines. Part 1: Rotor-Related Faults. Energies 2020, 13, 1394. [Google Scholar] [CrossRef] [Green Version]
- Cao, R.; Yunusa-Kaltungo, A. An Automated Data Fusion-Based Gear Faults Classification Framework in Rotating Machines. Sensors 2021, 21, 2957. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Ding, S.; Haghani, A.; Naik, A.; Khan, A.; Yin, S. Observer-based FDI Schemes for Wind Turbine Benchmark. IFAC Proc. Vol. 2011, 44, 7073–7078. [Google Scholar] [CrossRef]
- Hwas, A.; Katebi, R. Model-based fault detection and isolation for wind turbine. In Proceedings of the 2012 UKACC International Conference on Control, Cardiff, UK, 3–5 September 2012; pp. 876–881. [Google Scholar]
- XiaHou, K.; Li, M.S.; Liu, Y.; Wu, Q.H. Sensor Fault Tolerance Enhancement of DFIG-WTs via Perturbation Observer-Based DPC and Two-Stage Kalman Filters. IEEE Trans. Energy Convers. 2017, 33, 483–495. [Google Scholar] [CrossRef]
- Sharan, B.; Jain, T. Actuator and Sensor Fault Diagnosis for Wind Energy Conversion Systems. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 955–959. [Google Scholar]
- Zhang, X.; Zhang, Q.; Zhao, S.; Ferrari, R.; Polycarpou, M.; Parisini, T. Fault detection and isolation of the wind turbine benchmark: An estimation-based approach. IFAC Proc. Vol. 2011, 44, 8295–8300. [Google Scholar] [CrossRef] [Green Version]
- Odgaard, P.F.; Stoustrup, J. Unknown input observer based detection of sensor faults in a wind turbine. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 310–315. [Google Scholar]
- Mokhtari, A.; Belkheiri, M. An adapative observer based FDI for wind turbine benchmark model. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 742–746. [Google Scholar]
- Dey, S.; Pisu, P.; Ayalew, B. A Comparative Study of Three Fault Diagnosis Schemes for Wind Turbines. IEEE Trans. Control Syst. Technol. 2015, 23, 1853–1868. [Google Scholar] [CrossRef]
- Ziyabari, S.H.S.; Shoorehdeli, M.A.; Karimirad, M. Robust fault estimation of a blade pitch and drivetrain system in wind turbine model. J. Vib. Control 2021, 27, 277–294. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Dong, M.; Joo, Y.H. Kalman filter-based wind speed estimation for wind turbine control. Int. J. Control Autom. Syst. 2017, 15, 1089–1096. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Habibi, H.; Howard, I.; Simani, S.; Fekih, A. Decoupling Adaptive Sliding Mode Observer Design for Wind Turbines Subject to Simultaneous Faults in Sensors and Actuators. IEEE/CAA J. Autom. Sin. 2021, 8, 837–847. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Stoustrup, J.; Kinnaert, M. Fault-tolerant control of wind turbines: A benchmark model. IEEE Trans. Control Syst. Technol. 2013, 21, 1168–1182. [Google Scholar] [CrossRef] [Green Version]
- Edwards, C.; Spurgeon, S. On the development of discontinuous observers. Int. J. Control 1994, 59, 1211–1229. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S.; Patton, R.J. Sliding mode observers for fault detection and isolation. Automatic 2000, 36, 541–553. [Google Scholar] [CrossRef]
- Simani, S.; Fantuzzi, C.; Patton, R.J. Model-Based Fault Diagnosis Techniques. In Advances in Industrial Control; Springer: London, UK, 2003; pp. 19–60. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residuals | Definition | Fault 1 | Fault 2 | Fault3 |
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 0 | 0 | 0 | ||
| 0 | 0 | 0 | ||
| 0 | 1 | 0 | ||
| 0 | 0 | 0 | ||
| 0 | 0 | 1 |
| Residuals | Definition | Fault 4 | Fault 5 |
|---|---|---|---|
| 1 | 0 | ||
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borja-Jaimes, V.; Adam-Medina, M.; López-Zapata, B.Y.; Vela Valdés, L.G.; Claudio Pachecano, L.; Sánchez Coronado, E.M. Sliding Mode Observer-Based Fault Detection and Isolation Approach for a Wind Turbine Benchmark. Processes 2022, 10, 54. https://0-doi-org.brum.beds.ac.uk/10.3390/pr10010054
Borja-Jaimes V, Adam-Medina M, López-Zapata BY, Vela Valdés LG, Claudio Pachecano L, Sánchez Coronado EM. Sliding Mode Observer-Based Fault Detection and Isolation Approach for a Wind Turbine Benchmark. Processes. 2022; 10(1):54. https://0-doi-org.brum.beds.ac.uk/10.3390/pr10010054
Chicago/Turabian StyleBorja-Jaimes, Vicente, Manuel Adam-Medina, Betty Yolanda López-Zapata, Luis Gerardo Vela Valdés, Luisana Claudio Pachecano, and Eduardo Mael Sánchez Coronado. 2022. "Sliding Mode Observer-Based Fault Detection and Isolation Approach for a Wind Turbine Benchmark" Processes 10, no. 1: 54. https://0-doi-org.brum.beds.ac.uk/10.3390/pr10010054