The Preliminary Results for Five-System Ultra-Rapid Precise Orbit Determination of the One-Step Method Based on the Double-Difference Observation Model


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Multi-GNSS Observation Model of the New Prototype Software Platform
2.2. The Processing Strategies
2.2.1. Coordinate and Time Systems of the New Prototype Software Platform
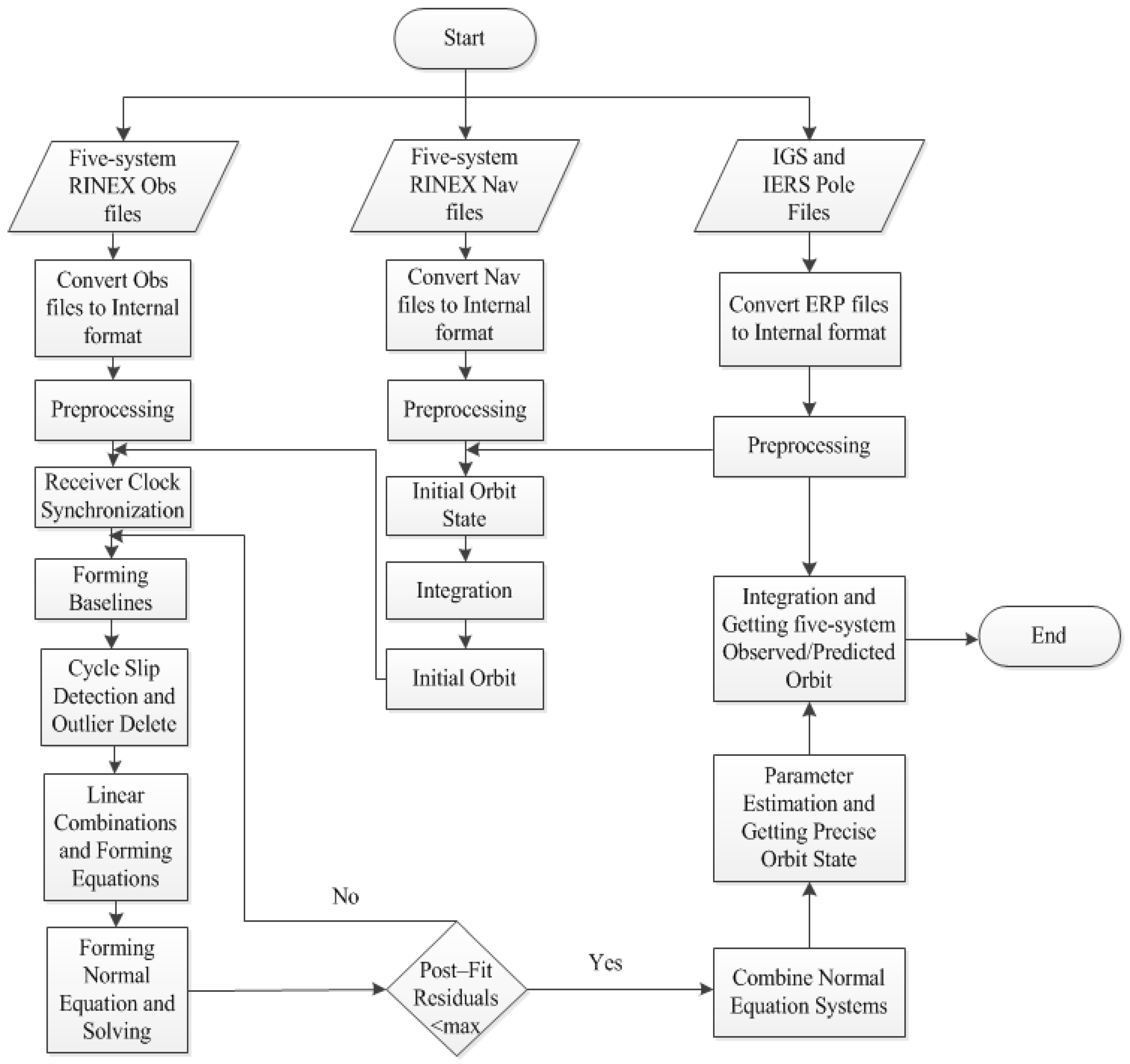
2.2.2. Partial Available Strategies and the Flowchart of the New Prototype Software Platform
3. Preliminary Results
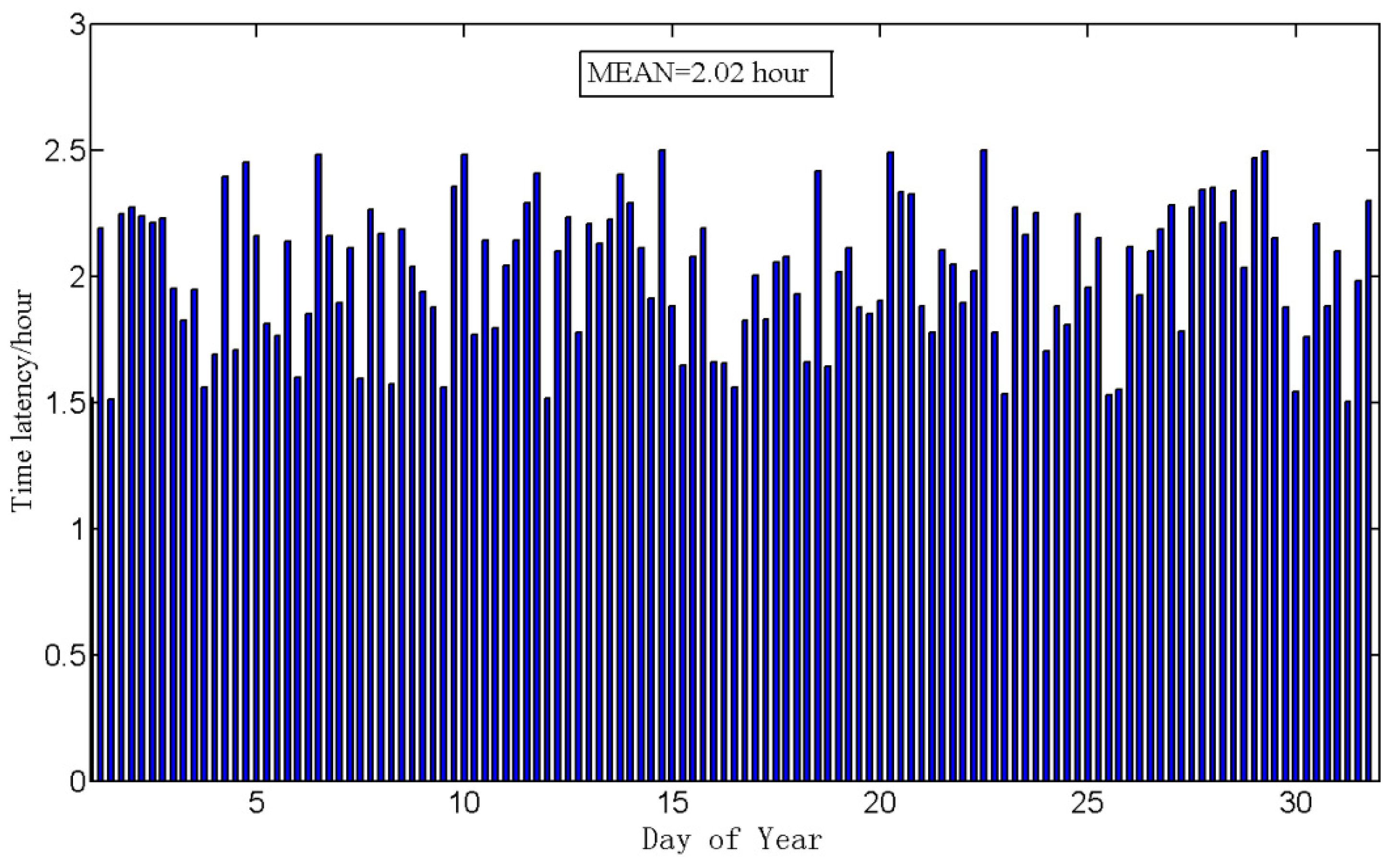
- Five-system ultra-rapid orbits were estimated, and the time latency for estimated ultra-rapid orbits is shown in Figure 3;
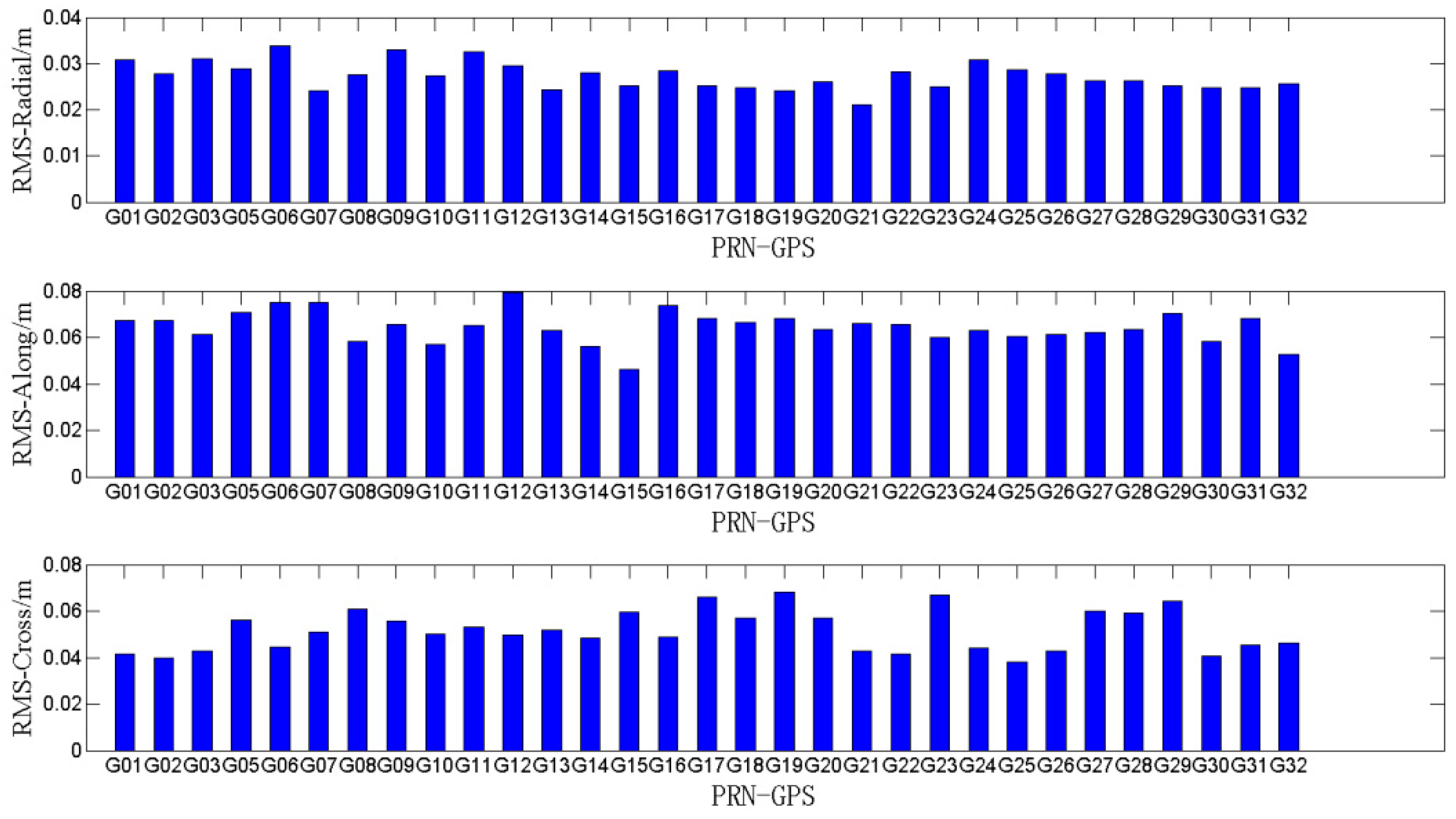
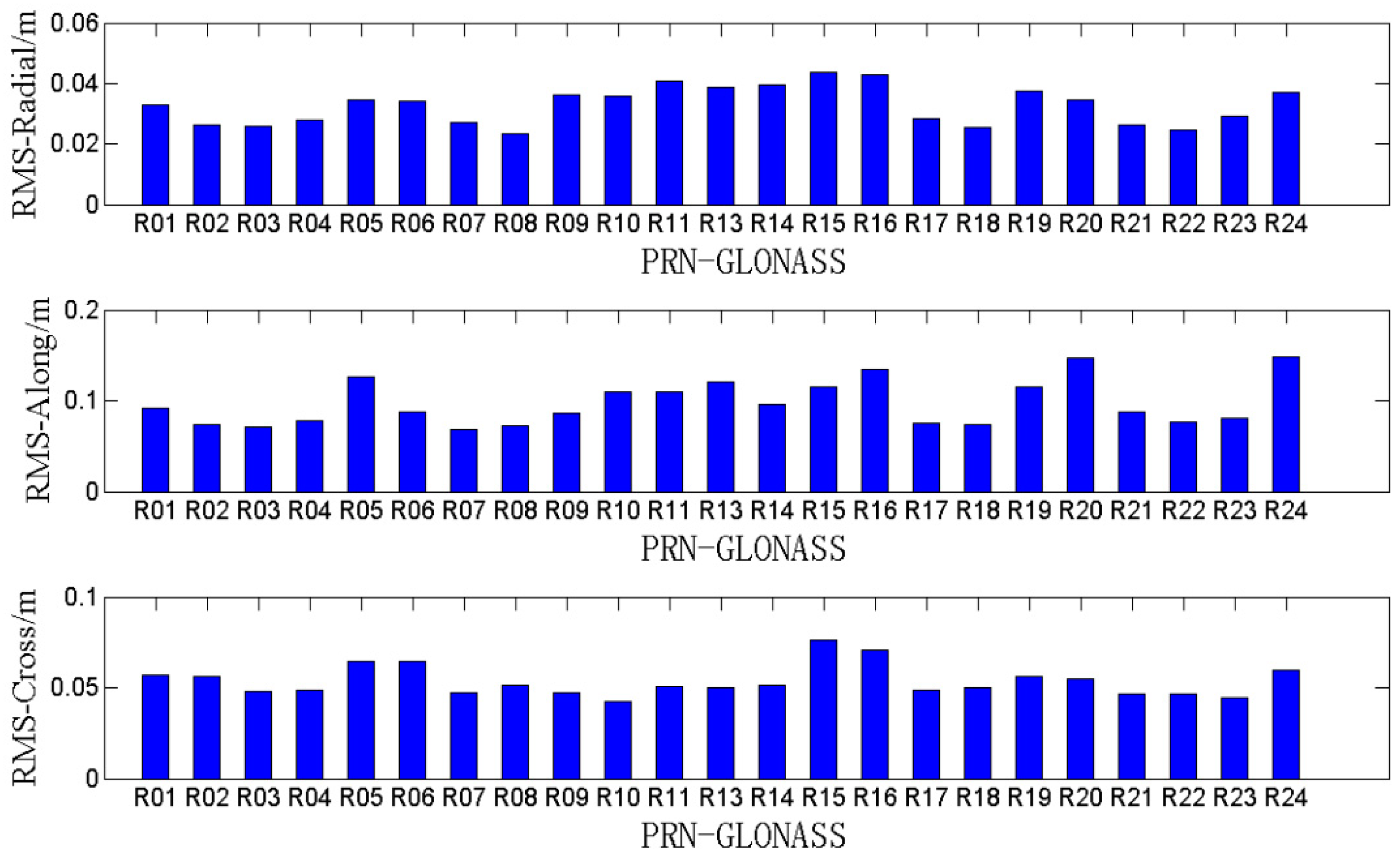
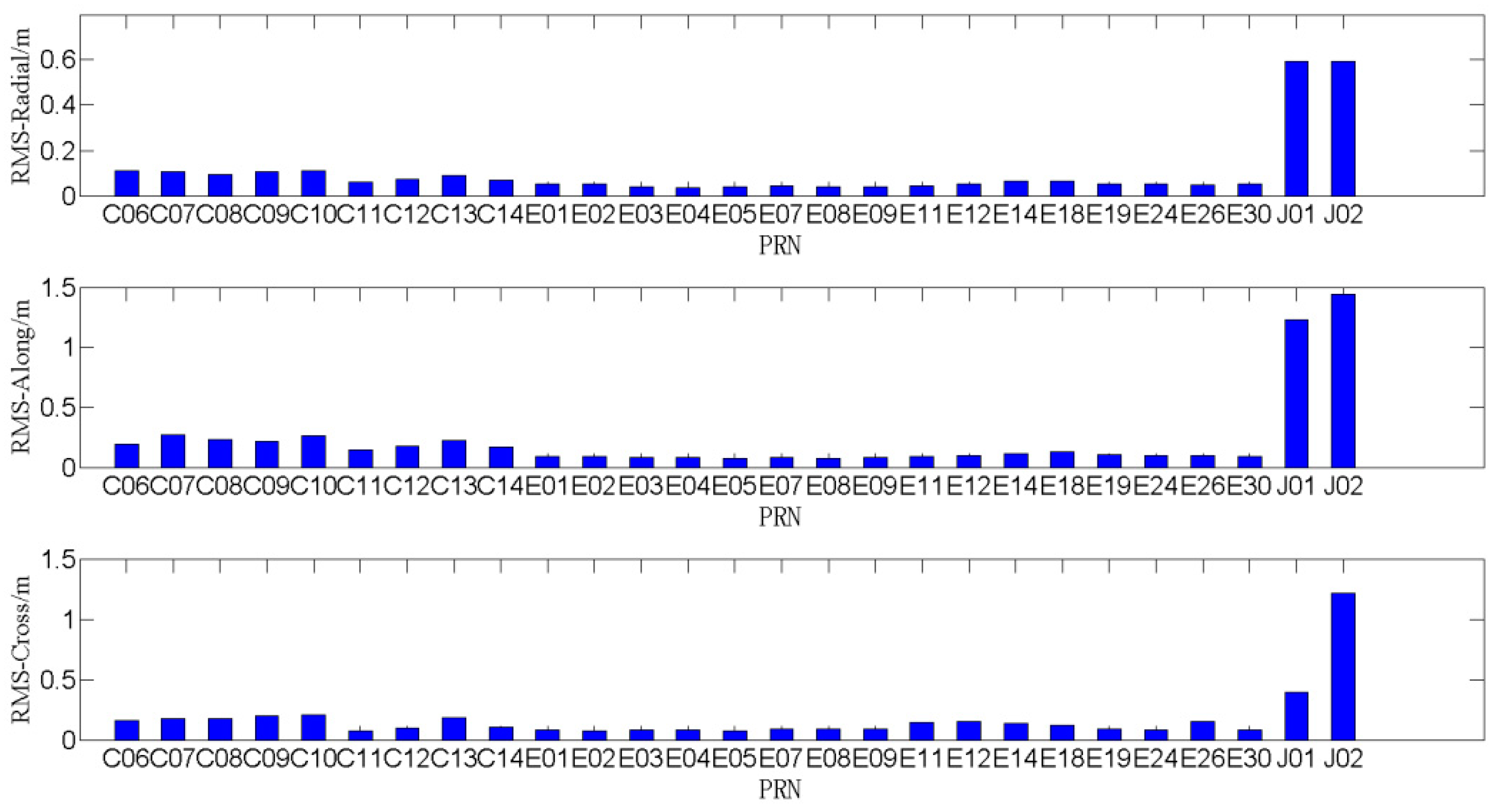
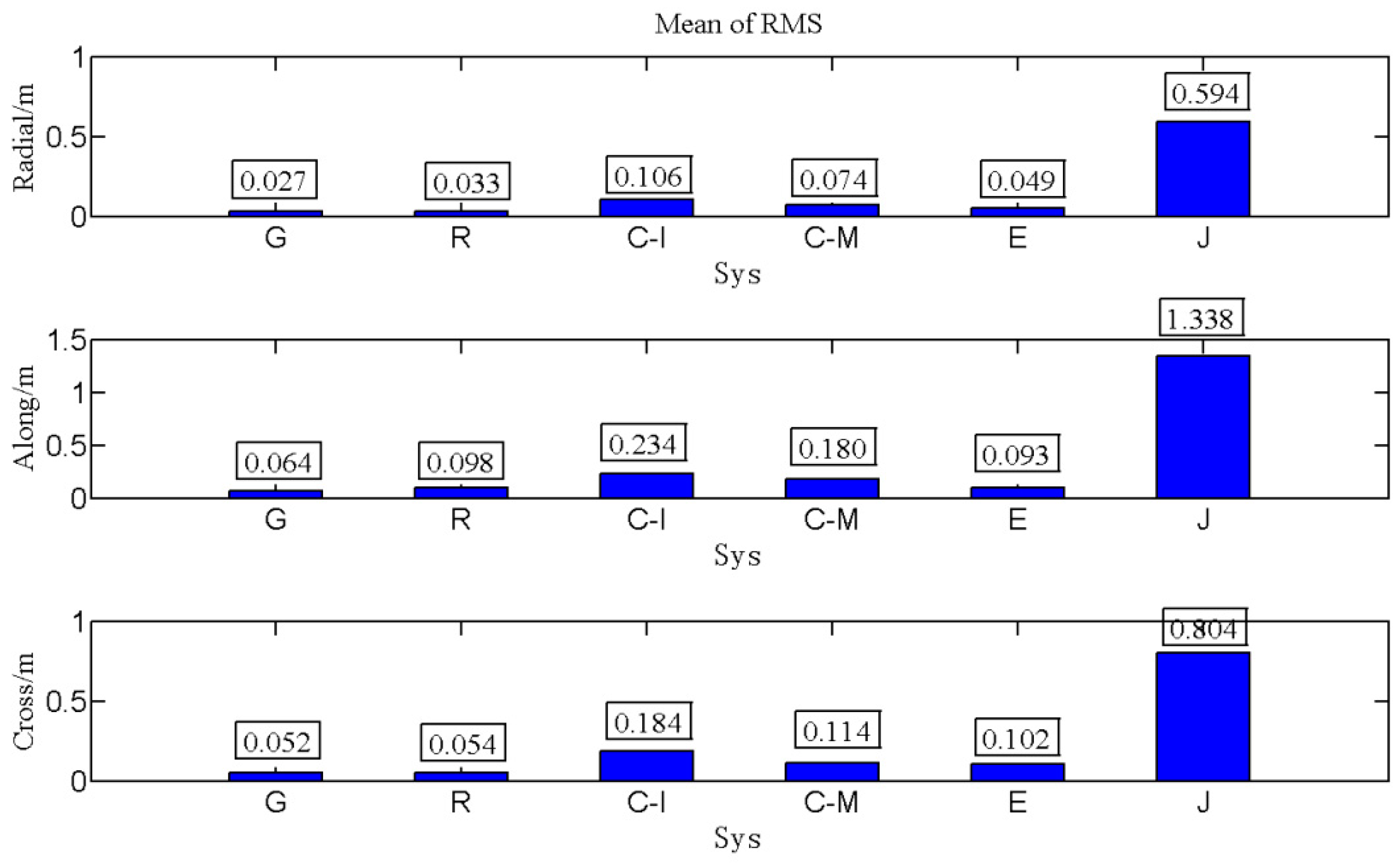
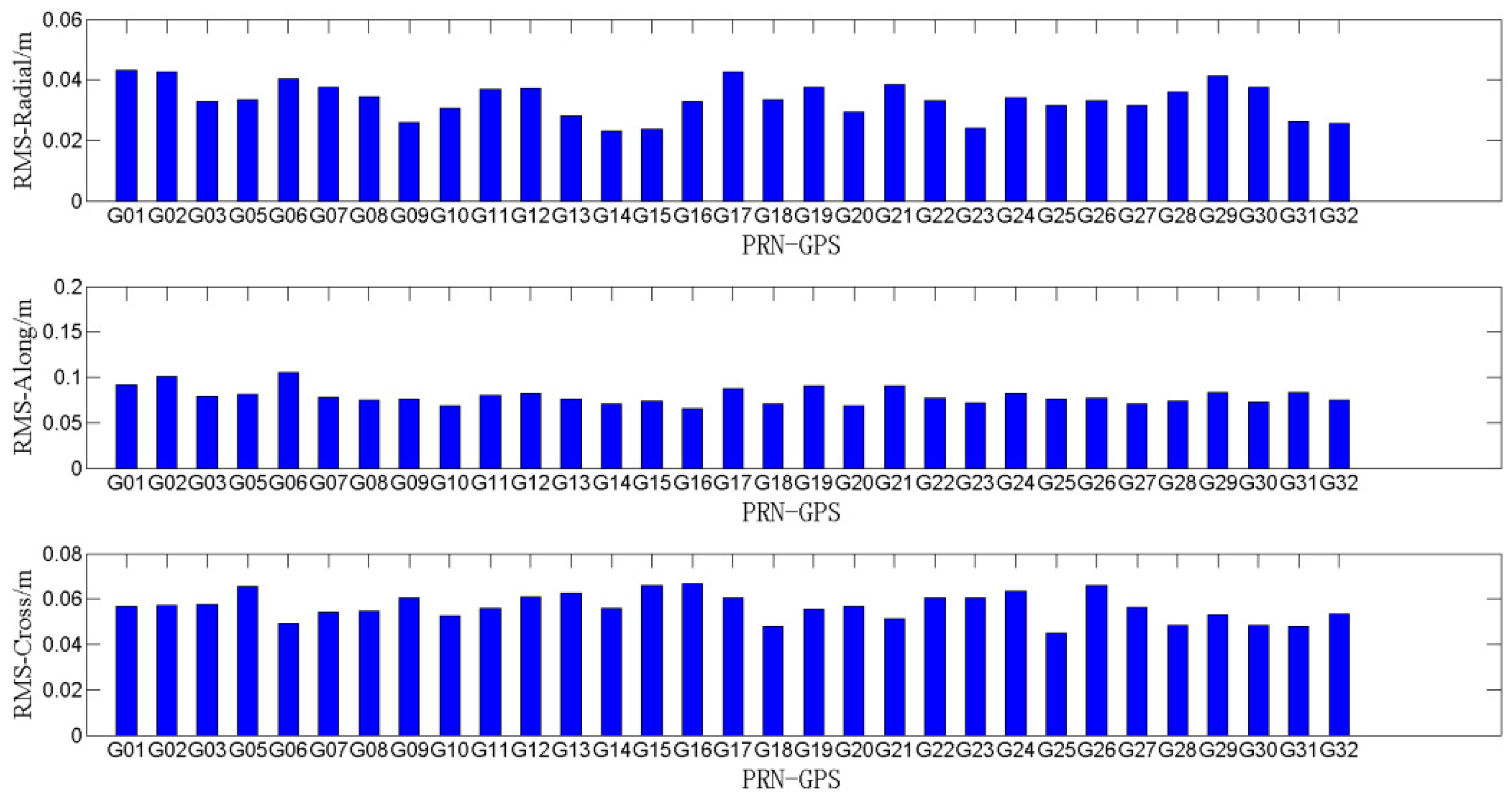
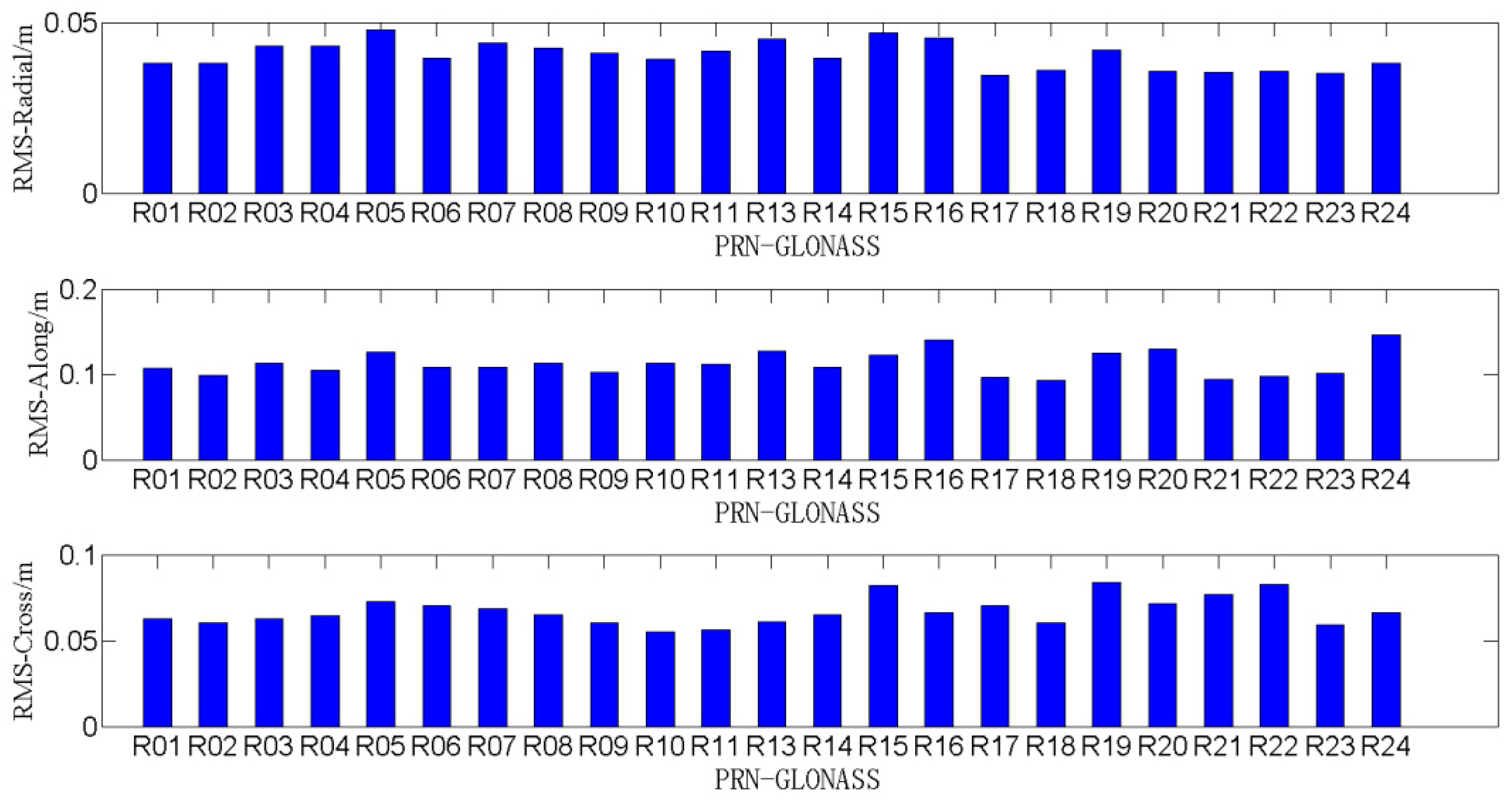
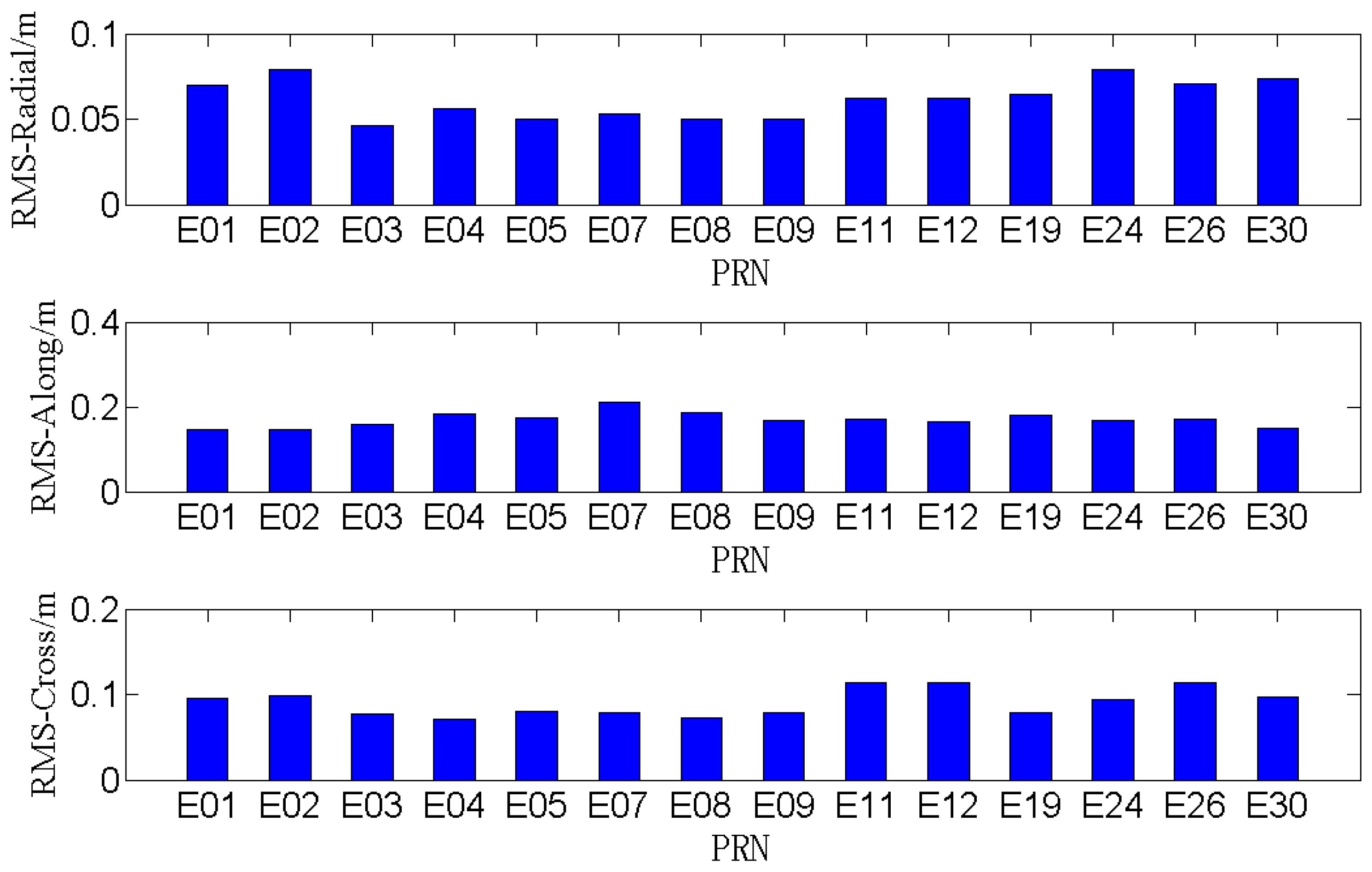
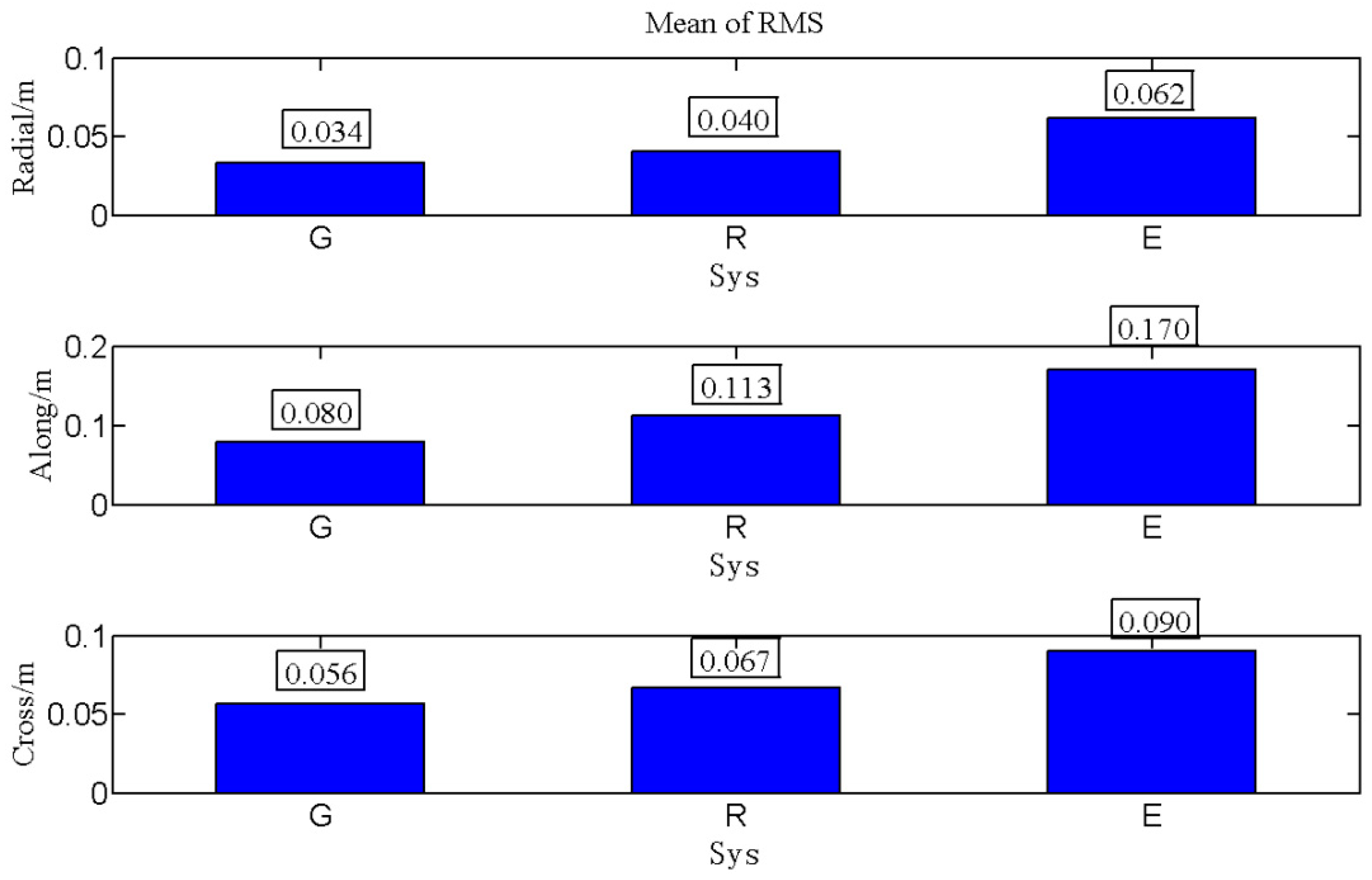
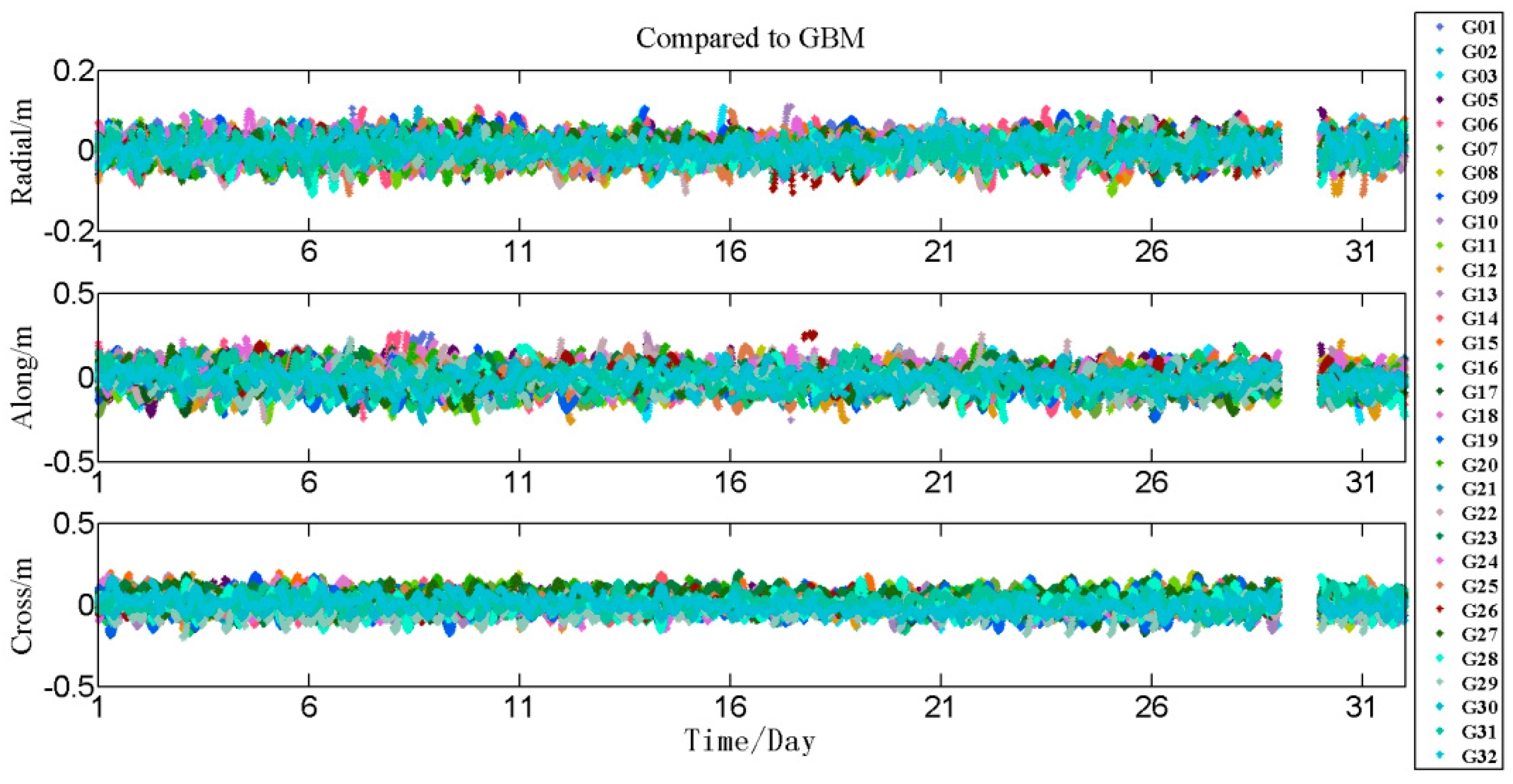
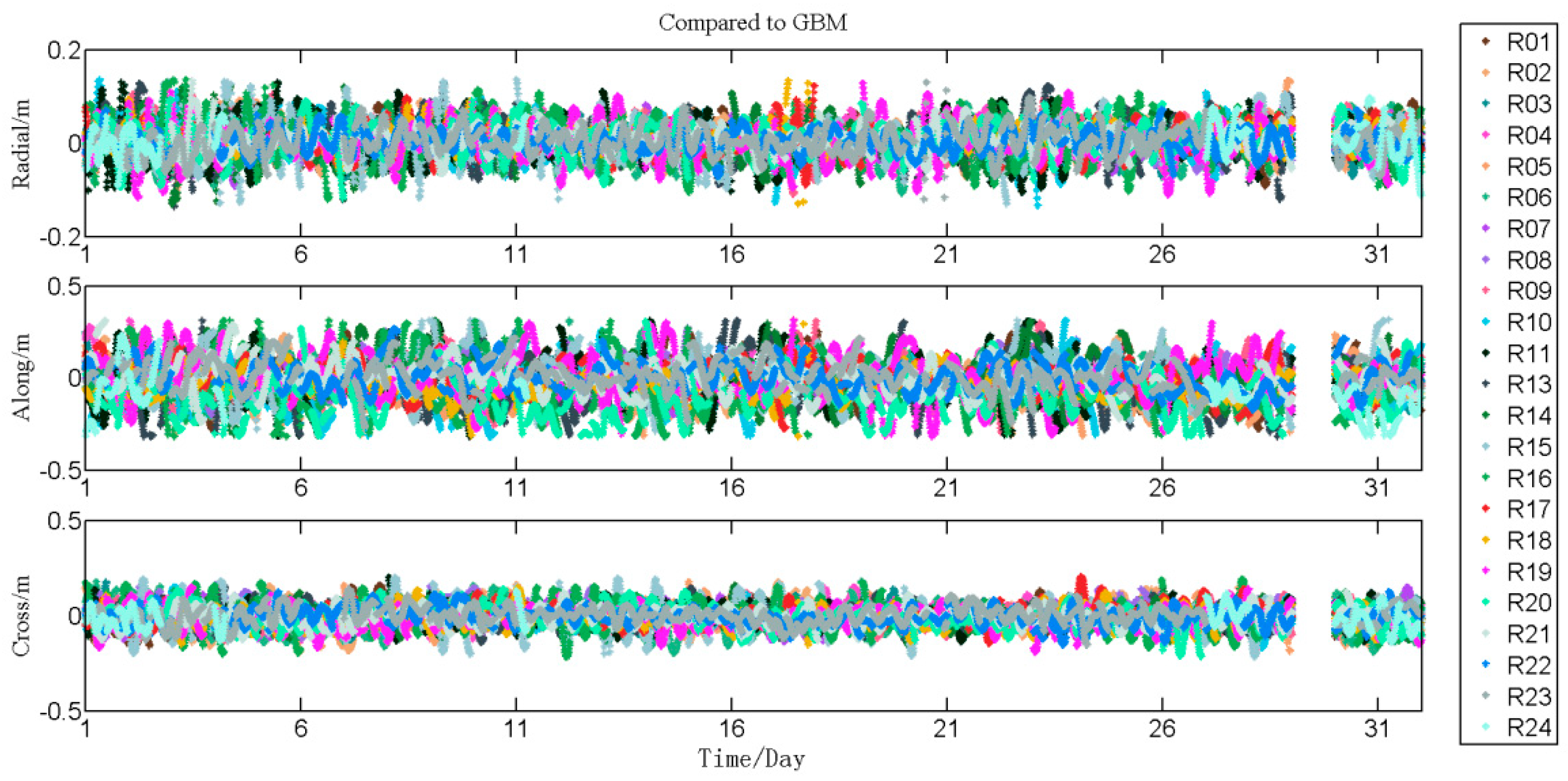
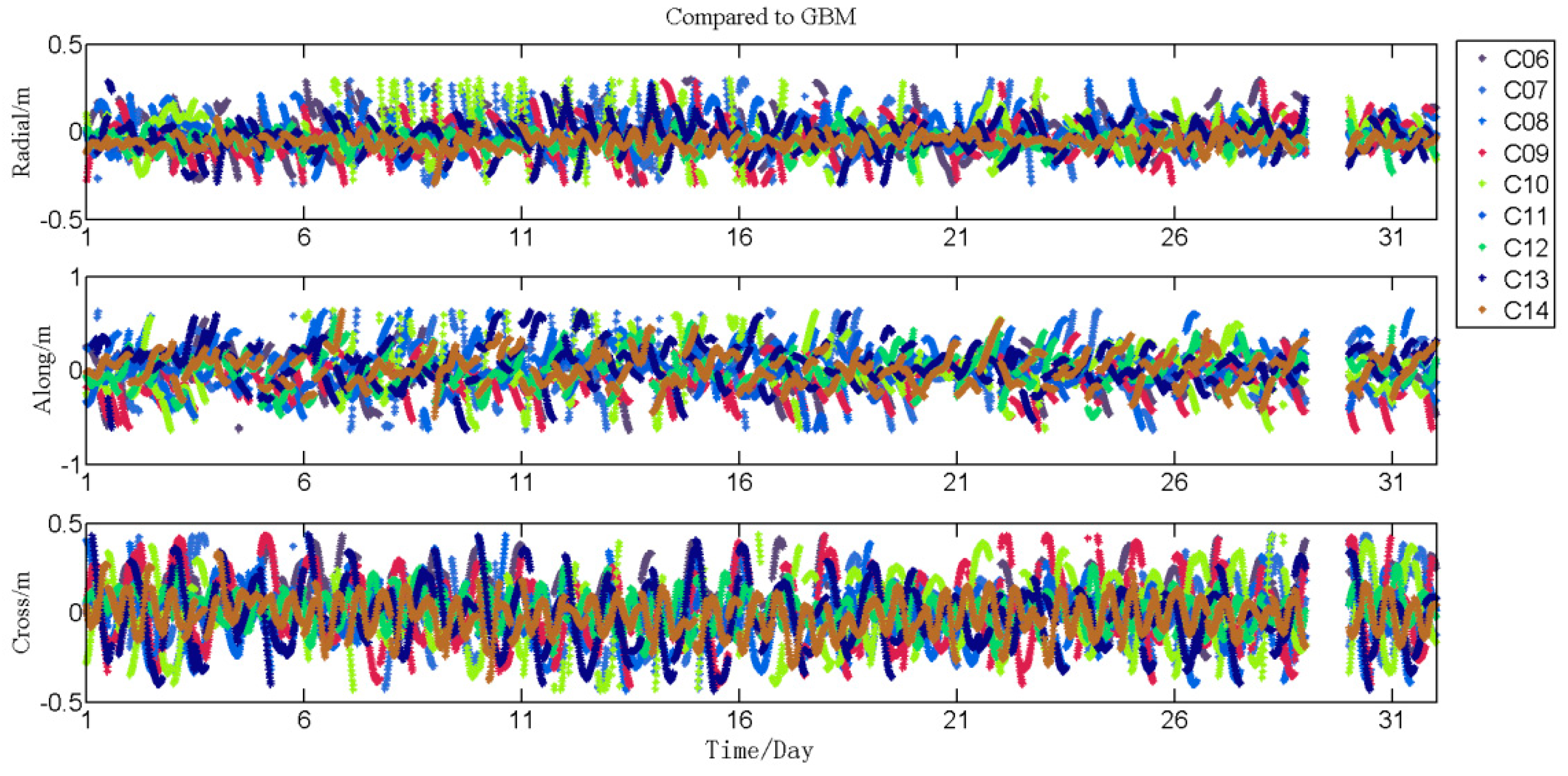
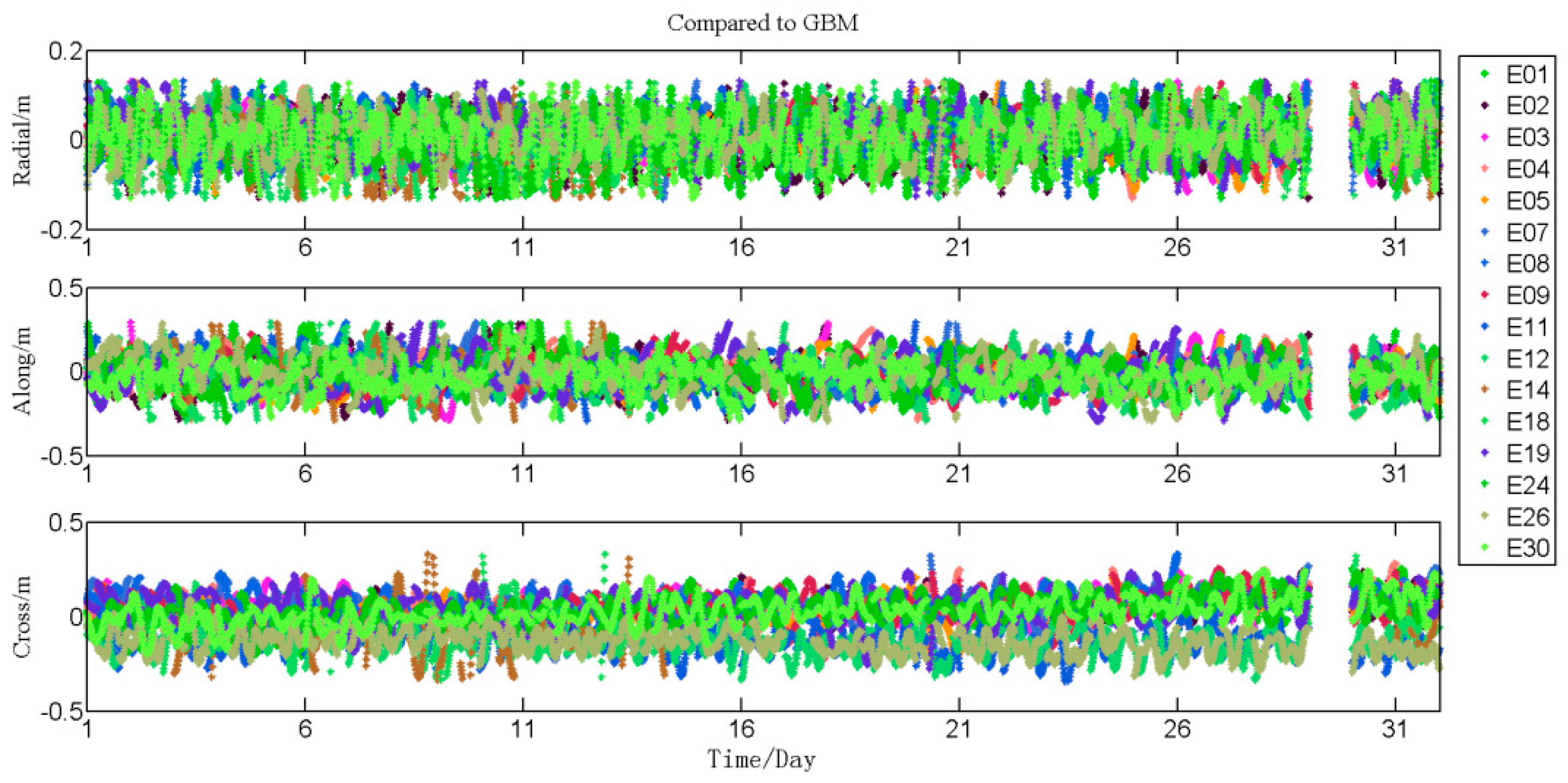
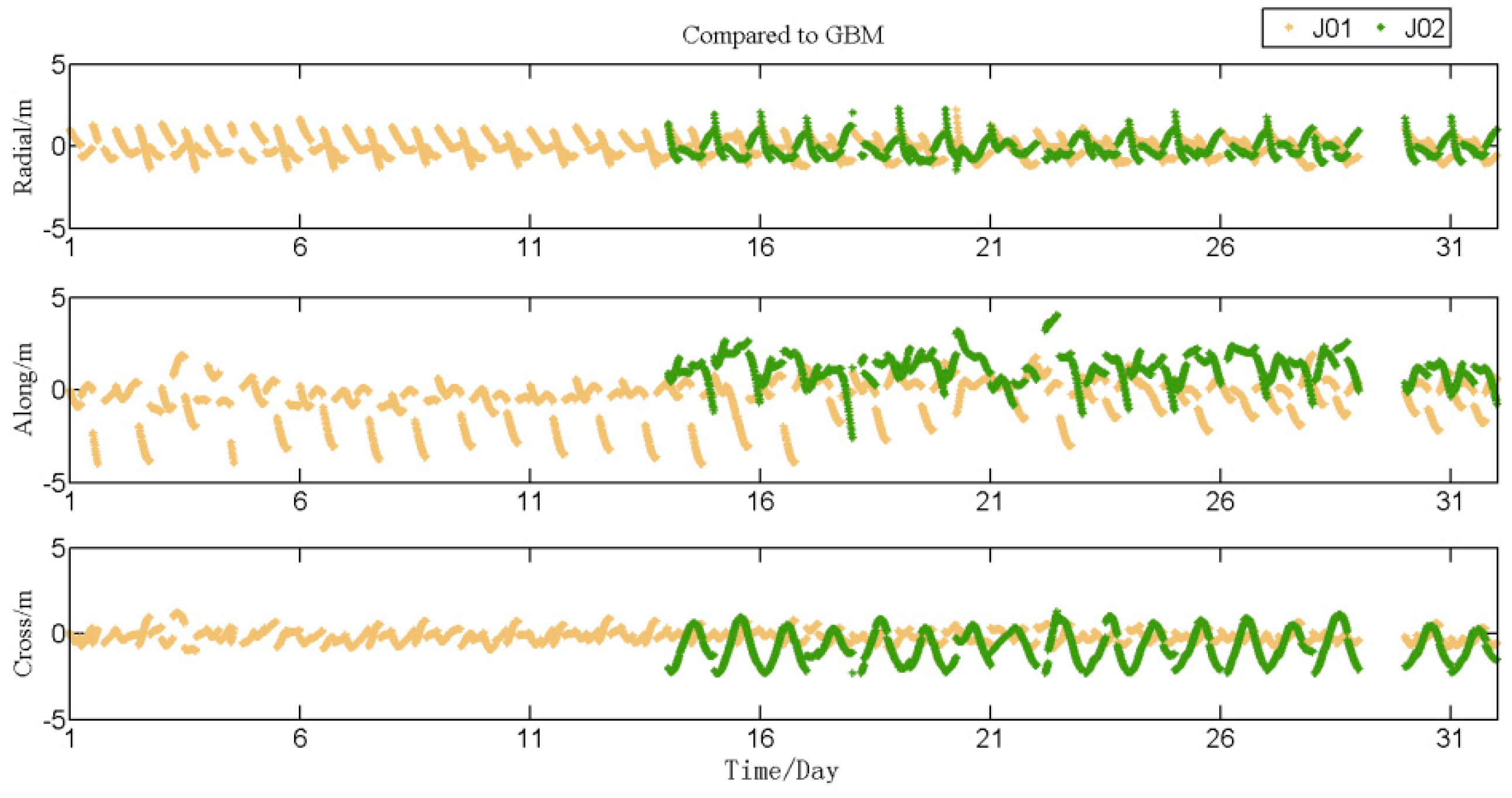
- The six-hour predicted part of each arc were compared to the final MGEX orbit products of GFZ (the accuracy codes are 0 for all satellites in gbm19861.sp3), and the root mean square (RMS) of the position deviation in the radial, along-track, and cross-track directions orbit components was calculated. Figure A1, Figure A2, Figure A3, Figure A4 and Figure A5 of Appendix A represent the differences between the predicted orbits of five-system ultra-rapid orbits and the orbits of GFZ for GPS, GLONASS, BDS, Galileo, and QZSS satellites. Figure 4, Figure 5, Figure 6 and Figure 7 represent the root mean square (RMS) of these satellites;
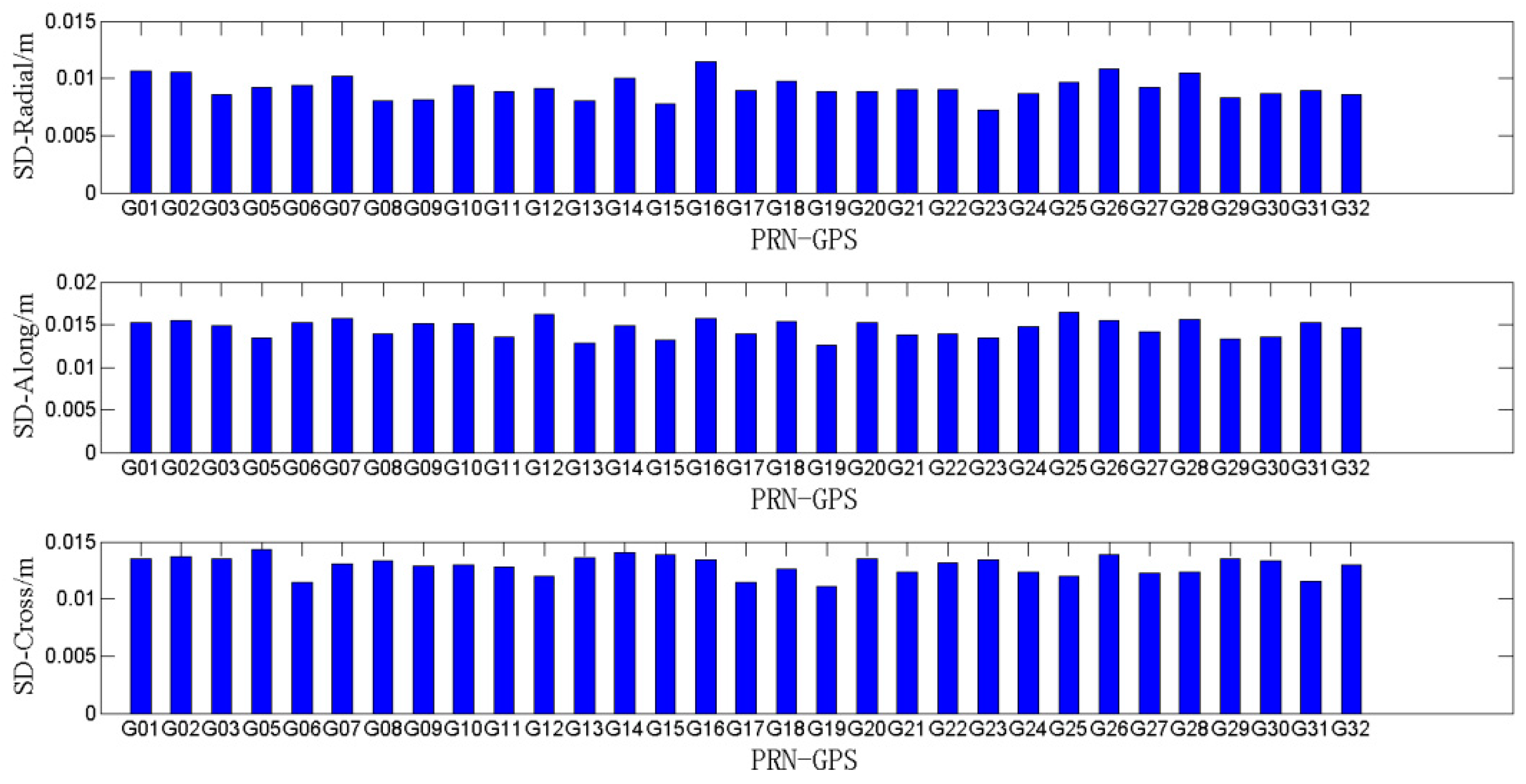
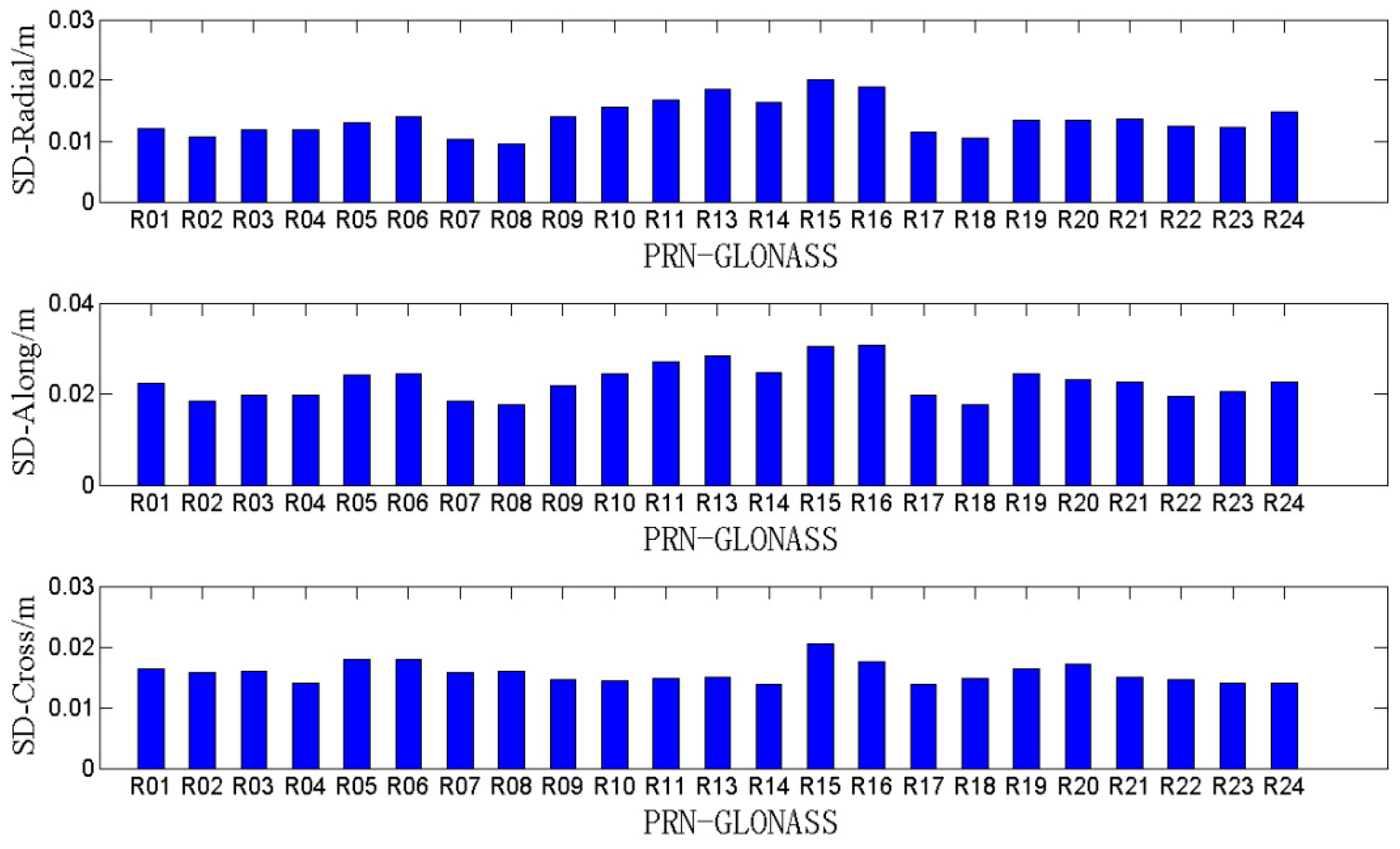
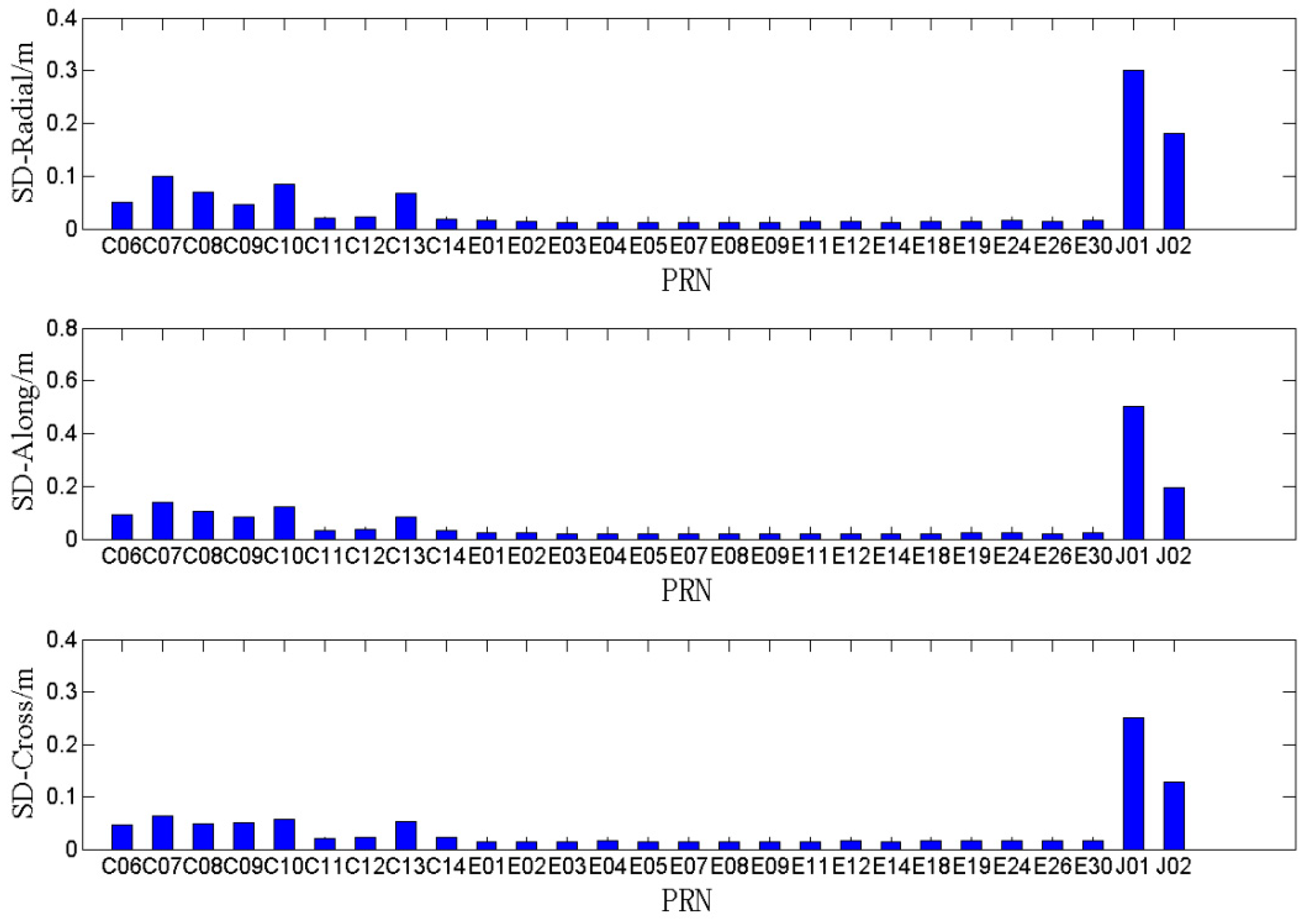
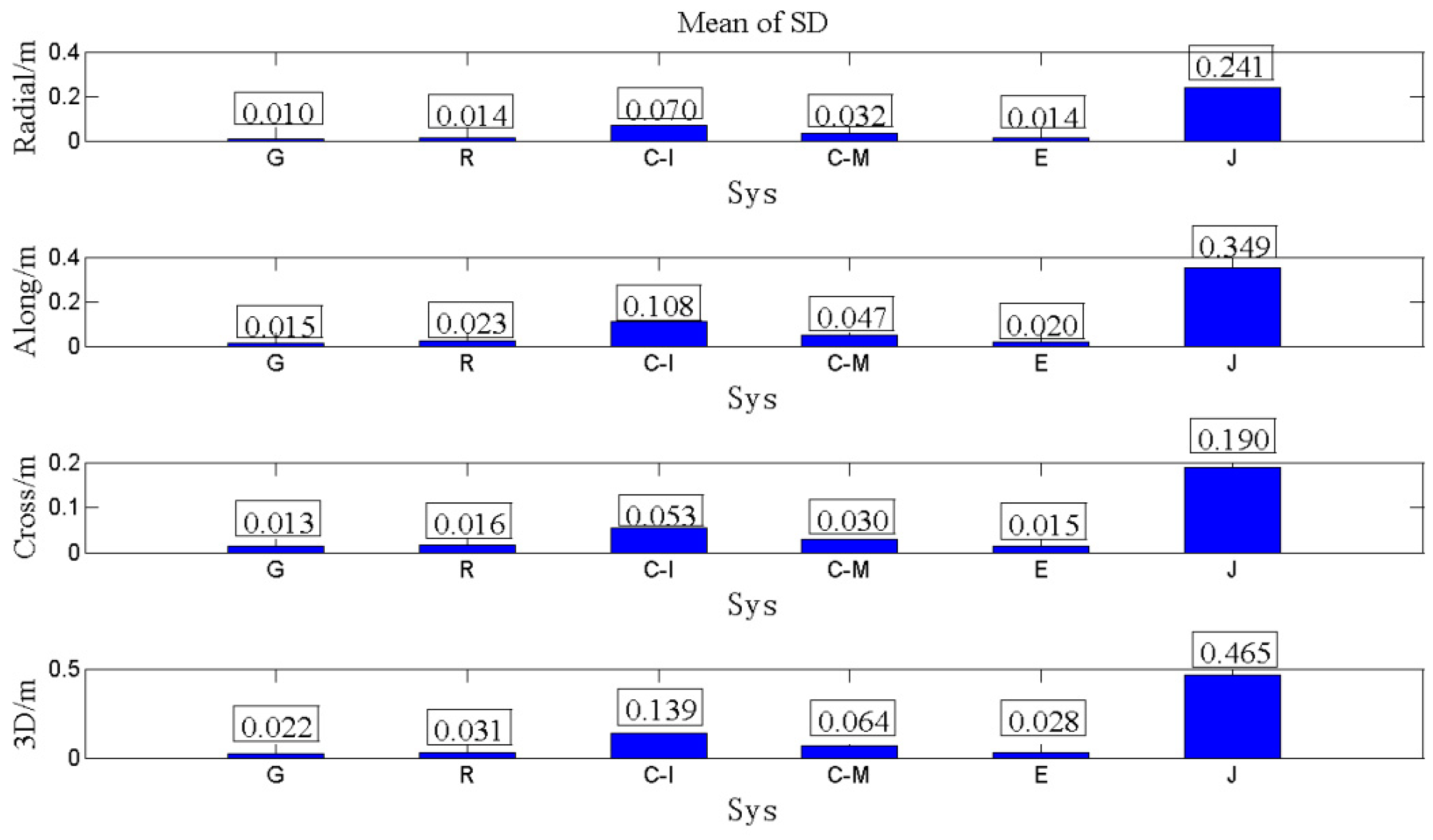
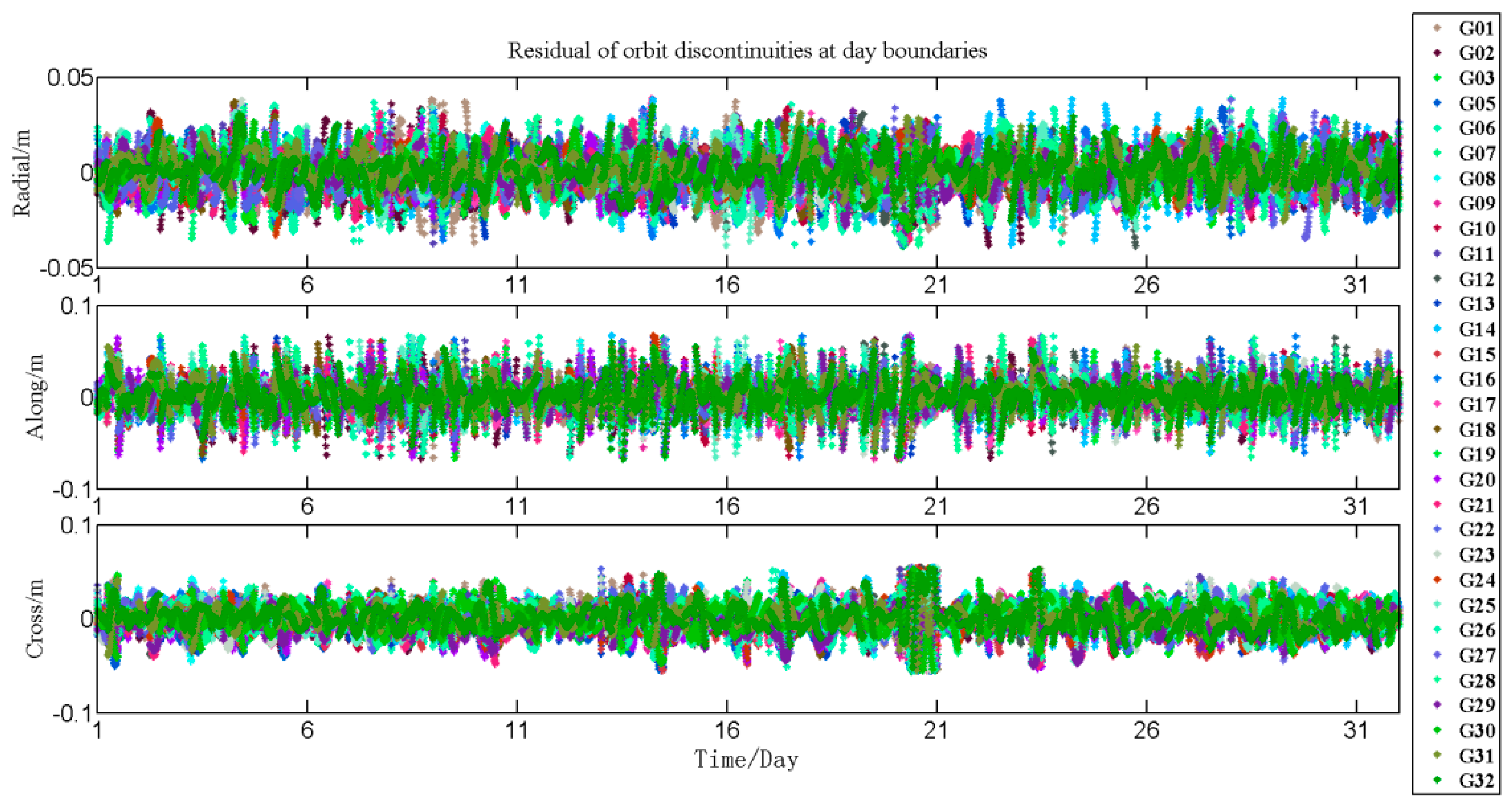
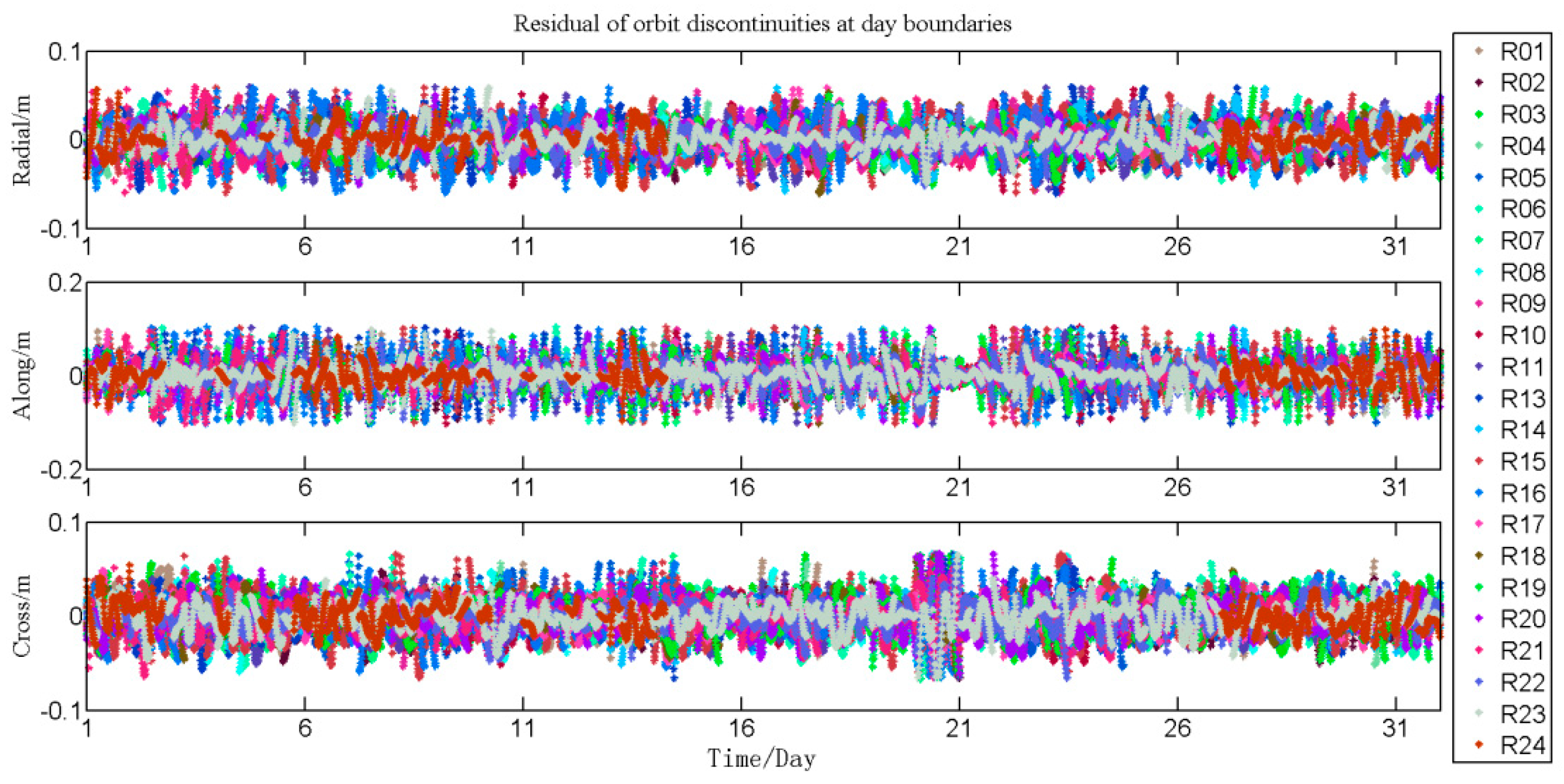
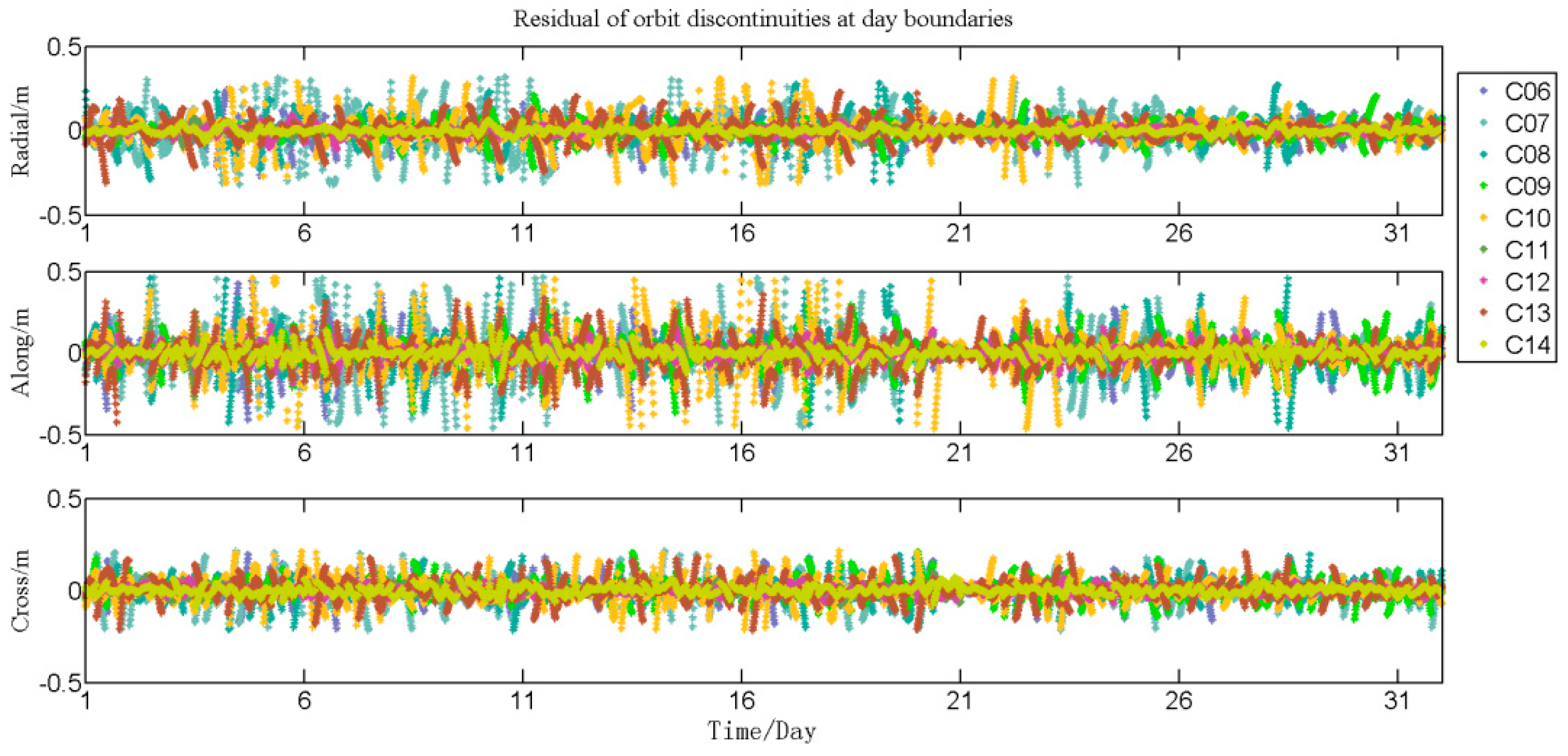
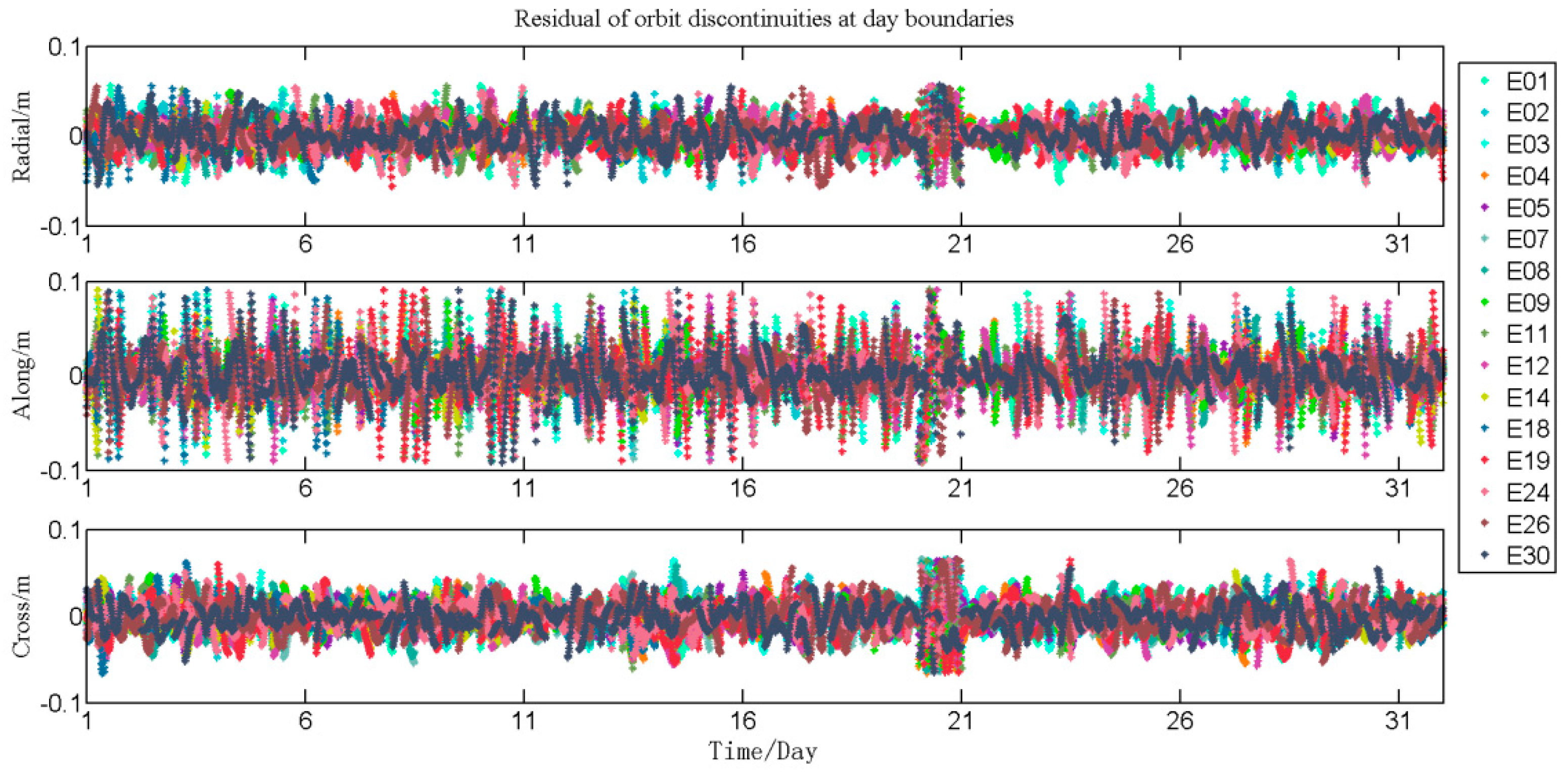
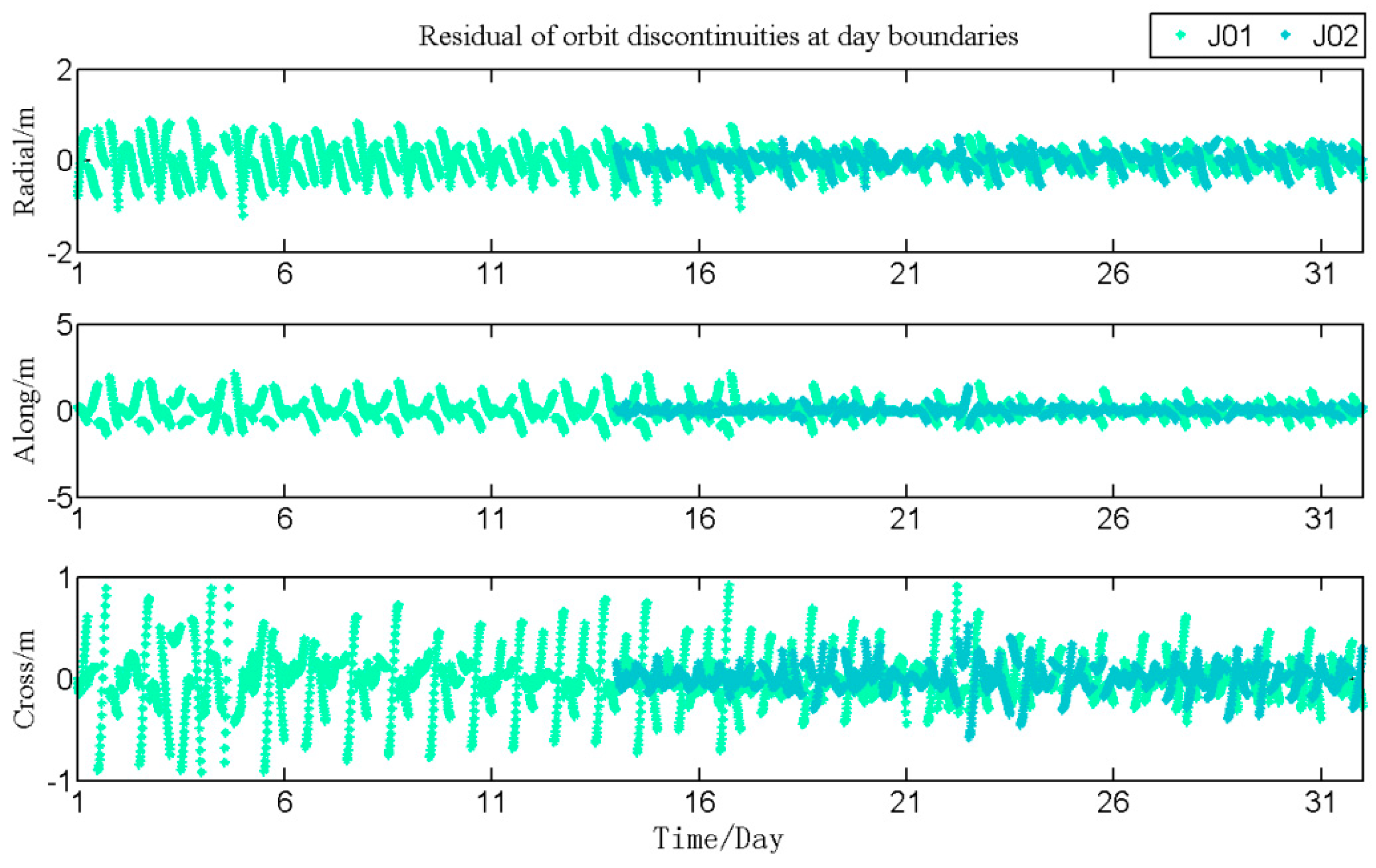
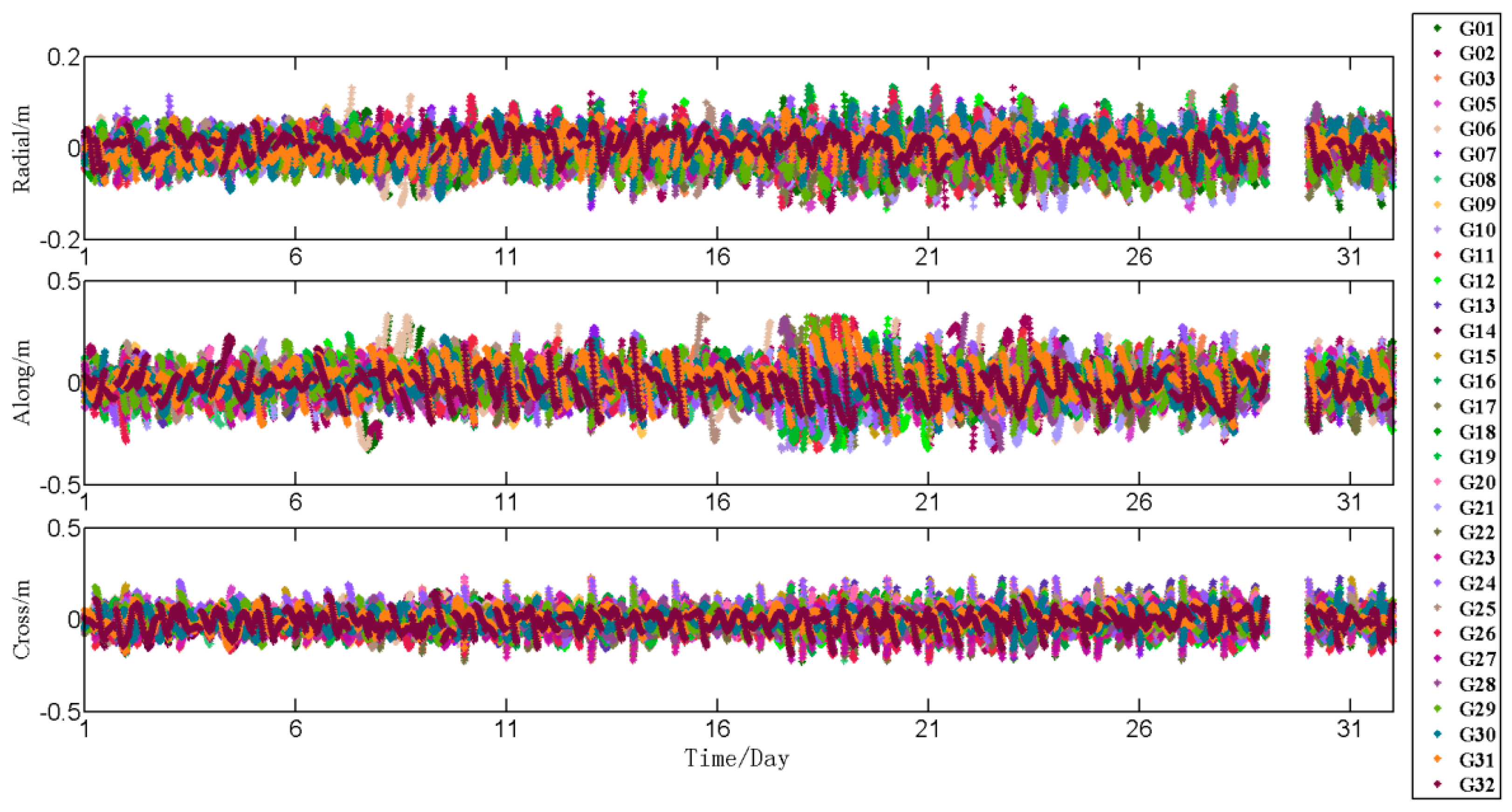
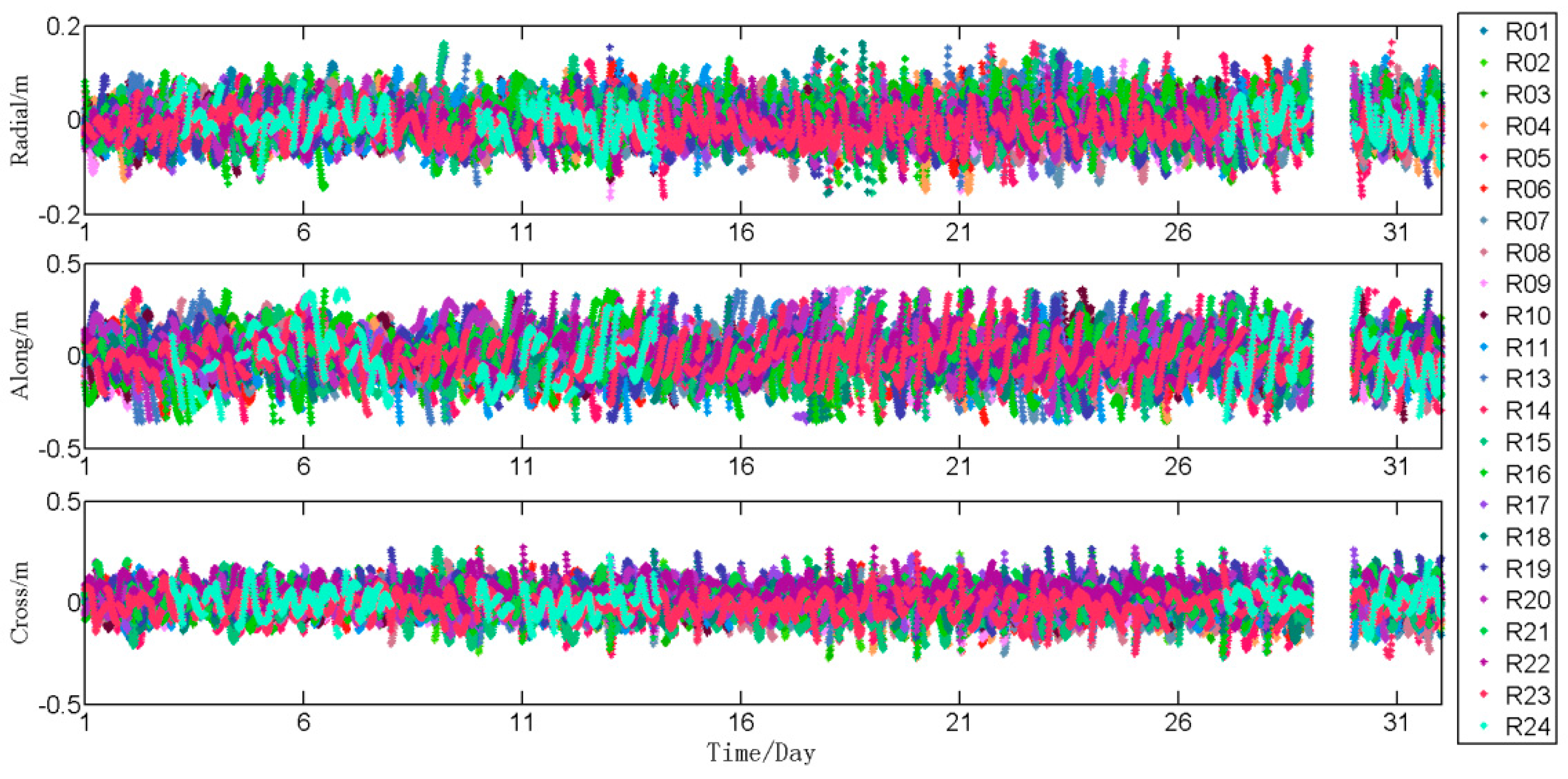
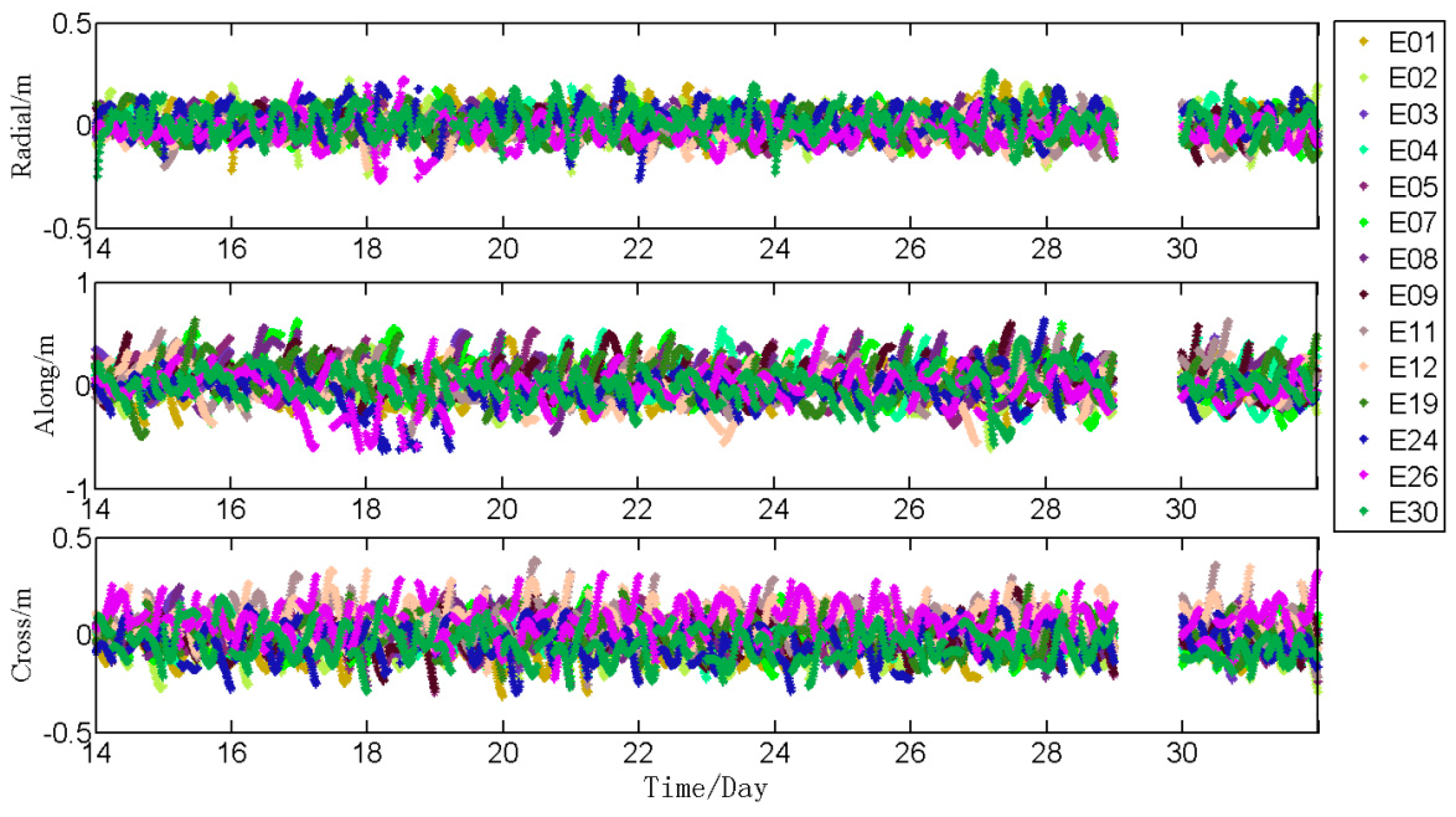
- The analysis of the orbit discontinuities at day boundaries. Figure A6, Figure A7, Figure A8, Figure A9 and Figure A10 of Appendix A represent the residuals of the fitting procedure for GPS, GLONASS, BDS, Galileo, and QZSS satellites in the radial, along-track, and cross-track directions orbit components. Figure 8, Figure 9, Figure 10 and Figure 11 represent the standard deviations (SD) of these satellites.
- The Institute of Geodesy and Geophysics (IGG), as one of the iGMAS ACs, has provided ultra-rapid orbits estimated by the two-step method [51]; therefore, the six-hour predicted part of each arc for these orbits (named IGGAC in this paper) were compared to the final MGEX orbits of GFZ in the radial, along-track, and cross-track directions orbit components. In this test period, the available ultra-rapid orbits of IGGAC included satellites of GPS and GLONASS from 1 January 2018 to 31 January 2018, and of Galileo from 14 January 2018 to 31 January 2018. Figure A11, Figure A12 and Figure A13 of Appendix A represent the differences between the predicted orbits of IGGAC and the orbits of GFZ for GPS, GLONASS, and Galileo satellites. Figure 12, Figure 13, Figure 14 and Figure 15 represent the root mean square (RMS) of these satellites. Table A1 of Appendix A shows the differences between the results of our new prototype software platform and IGGAC in consistency with the final MGEX orbit products of GFZ.
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | The New Prototype Software Platform (m) | IGGAC (m) | Improved Percentage (%) | |
|---|---|---|---|---|
| GPS | Radial | 0.010 | 0.034 | 70.59 |
| Along | 0.015 | 0.080 | 81.25 | |
| Cross | 0.013 | 0.056 | 76.79 | |
| 3D | 0.022 | 0.103 | 78.51 | |
| GLONASS | Radial | 0.014 | 0.040 | 65.00 |
| Along | 0.023 | 0.113 | 79.65 | |
| Cross | 0.016 | 0.067 | 76.12 | |
| 3D | 0.031 | 0.137 | 77.19 | |
| Galileo | Radial | 0.014 | 0.062 | 77.42 |
| Along | 0.020 | 0.170 | 88.24 | |
| Cross | 0.015 | 0.090 | 83.33 | |
| 3D | 0.029 | 0.202 | 85.82 | |
References
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.G.; Zhao, Q.L.; Perosanz, F.; Romero, I.; Noll, C.; Sturze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Broadcast versus precise ephemerides: A multi-GNSS perspective. GPS Solut. 2015, 19, 321–333. [Google Scholar] [CrossRef]
- Harnisch, F.; Healy, S.B.; Bauer, P.; English, S.J. Scaling of GNSS Radio Occultation Impact with Observation Number Using an Ensemble of Data Assimilations. Mon. Weather Rev. 2013, 141, 4395–4413. [Google Scholar] [CrossRef]
- Zhao, C.; Yuan, Y.; Zhang, B.; Li, M. Ionosphere Sensing with a Low-Cost, Single-Frequency, Multi-GNSS Receiver. IEEE Trans. Geosci. Remote Sens. 2018, 1–12. [Google Scholar] [CrossRef]
- Li, X.; Zus, F.; Lu, C.; Dick, G.; Ning, T.; Ge, M.; Wickert, J.; Schuh, H. Retrieving of atmospheric parameters from multi-GNSS in real time: Validation with water vapor radiometer and numerical weather model. J. Geophys. Res.-Atmos. 2015, 120, 7189–7204. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.X.; Zhang, X.H.; Wang, J.L. The contribution of Multi-GNSS Experiment (MGEX) to precise point positioning. Adv. Space Res. 2017, 59, 2714–2725. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef] [Green Version]
- Li, B.F.; Li, Z.; Zhang, Z.T.; Tan, Y.A. ERTK: Extra-wide-lane RTK of triple-frequency GNSS signals. J. Geod. 2017, 91, 1031–1047. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Lutz, S.; Meindl, M.; Steigenberger, P.; Beutler, G.; Sosnica, K.; Schaer, S.; Dach, R.; Arnold, D.; Thaller, D.; Jaeggi, A. Impact of the arc length on GNSS analysis results. J. Geod. 2016, 90, 365–378. [Google Scholar] [CrossRef]
- Bury, G.; Sośnica, K.; Zajdel, R. Multi-GNSS orbit determination using satellite laser ranging. J. Geod. 2018. [Google Scholar] [CrossRef]
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J.-C. Zero-difference GPS ambiguity resolution at CNES–CLS IGS Analysis Center. J. Geod. 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Prange, L.; Dach, R.; Lutz, S.; Schaer, S.; Jäggi, A. The CODE MGEX Orbit and Clock Solution; Springer: Cham, Switzerland, 2015; pp. 767–773. [Google Scholar]
- Uhlemann, M.; Gendt, G.; Ramatschi, M.; Deng, Z. GFZ Global Multi-GNSS Network and Data Processing Results; Springer: Cham, Switzerland, 2015; pp. 673–679. [Google Scholar]
- Steigenberger, P.; Hugentobler, U.; Loyer, S.; Perosanz, F.; Prange, L.; Dach, R.; Uhlemann, M.; Gendt, G.; Montenbruck, O. Galileo orbit and clock quality of the IGS Multi-GNSS Experiment. Adv. Space Res. 2015, 55, 269–281. [Google Scholar] [CrossRef]
- Springer, T.; Otten, M.; Flohrer, C. Spreading the usage of NAPEOS, the ESA tool for satellite geodesy. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 22–27 April 2012. [Google Scholar]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Kasho, S. Accuracy evaluation of QZS-1 precise ephemerides with satellite laser ranging. In Proceedings of the 19th International Workshop on Laser Ranging, Annapolis, MD, USA, 27–31 October 2014; p. 30. [Google Scholar]
- Prange, L.; Orliac, E.; Dach, R.; Arnold, D.; Beutler, G.; Schaer, S.; Jäggi, A. CODE’s five-system orbit and clock solution—The challenges of multi-GNSS data analysis. J. Geod. 2017, 91, 345–360. [Google Scholar] [CrossRef]
- Steigenberger, P.; Hugentobler, U.; Montenbruck, O.; Hauschild, A. Precise orbit determination of GIOVE-B based on the CONGO network. J. Geod. 2011, 85, 357–365. [Google Scholar] [CrossRef]
- Li, X.; Yuan, Y.; Zhu, Y.; Huang, J.; Wu, J.; Xiong, Y.; Zhang, X.; Li, X. Precise orbit determination for BDS3 experimental satellites using iGMAS and MGEX tracking networks. J. Geod. 2018. [Google Scholar] [CrossRef]
- Springer, T.A.; Hugentobler, U. IGS ultra rapid products for (near-) real-time applications. Phys. Chem. Earth Part A-Solid Earth Geod. 2001, 26, 623–628. [Google Scholar] [CrossRef]
- Ray, J.; Griffiths, J. Status of IGS ultra-rapid products for realtime applications. In Proceedings of the 2008 AGU Fall Meeting, San Francisco, CA, USA, 15–19 December 2008; p. 18. [Google Scholar]
- Choi, K.K.; Ray, J.; Griffiths, J.; Bae, T.-S. Evaluation of GPS orbit prediction strategies for the IGS Ultra-rapid products. GPS Solut. 2013, 17, 403–412. [Google Scholar] [CrossRef]
- Dousa, J. Precise orbits for ground-based GPS meteorology: Processing strategy and quality assessment of the orbits determined at geodetic observatory Pecny. J. Meteorol. Soc. Jpn. 2004, 82, 371–380. [Google Scholar] [CrossRef]
- Lutz, S.; Beutler, G.; Schaer, S.; Dach, R.; Jaeggi, A. CODE’s new ultra-rapid orbit and ERP products for the IGS. GPS Solut. 2016, 20, 239–250. [Google Scholar] [CrossRef]
- Li, X.; Chen, X.; Ge, M.; Schuh, H. Improving multi-GNSS ultra-rapid orbit determination for real-time precise point positioning. J. Geod. 2018. [Google Scholar] [CrossRef]
- Hadas, T.; Krypiak-Gregorczyk, A.; Hernandez-Pajares, M.; Kaplon, J.; Paziewski, J.; Wielgosz, P.; Garcia-Rigo, A.; Kazmierski, K.; Sosnica, K.; Kwasniak, D.; et al. Impact and Implementation of Higher-Order Ionospheric Effects on Precise GNSS Applications. J. Geophys. Res.-Solid Earth. 2017, 122, 9420–9436. [Google Scholar] [CrossRef]
- Beutler, G.; Brockmann, E.; Gurtner, W.; Hugentobler, U.; Mervart, L.; Rothacher, M.; Verdun, A. Extended orbit modeling techniques at the CODE processing center of the international GPS service for geodynamics (IGS): Theory and initial results. Manuscr. Geod. 1994, 19, 367–386. [Google Scholar]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, S.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geod. 2015, 89, 775–791. [Google Scholar] [CrossRef] [Green Version]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; University of Bern, Bern Open Publishing: Bern, Switzerland, 2015; p. 174. [Google Scholar]
- IGS, RTCM-SC104. RINEX: The Receiver Independent Exchange Format, Version 3.02; Technical Report; IGS Central Bureau: Kwun Tong, Hong Kong, 2013. [Google Scholar]
- Interface Specifcation I.S. GPS-200, Revision D, Navstar GPS Space Segment/Navigation User Interfaces; Navstar Joint Program Office: El Segundo, CA, USA, 2004. [Google Scholar]
- Glonass ICD. Glonass Interface Control Document; Russian Institute of Space Device Engineering: Moscow, Russia, 2008. [Google Scholar]
- ICD BDS. BeiDou Navigation Satellite System Signal in Space Interface Control Document; China Satellite Navigation Office: Changdou, China, 2013; p. 12.
- European Union. European GNSS (Galileo) Open Service: Signal in Space Interface Control Document; Office for Official Publications of the European Communities: Brussels, Belgium, 2010. [Google Scholar]
- Quasi-Zenith Satellite System Navigation Service, Interface Specifications for QZSS (IS-QZSSVer 1.2). Available online: http://qzss.jaxa.jp/isqzss/index_e.html (accessed on 28 November 2014).
- Yang, Y.; Lu, M.; Han, C. Some notes on interoperability of GNSS. Acta Geod. Cartogr. Sin. 2016, 45, 253–259. [Google Scholar] [CrossRef]
- Sośnica, K.; Prange, L.; Kaźmierski, K.; Bury, G.; Drożdżewski, M.; Zajdel, R.; Hadas, T. Validation of Galileo orbits using SLR with a focus on satellites launched into incorrect orbital planes. J. Geod. 2018, 92, 131–148. [Google Scholar] [CrossRef]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkulin, R.; Kogure, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short Note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]
- Luzum, B.J.; Ray, J.R.; Carter, M.S.; Josties, F.J. Recent Improvements to IERS Bulletin A Combination and Prediction. GPS Solut. 2001, 4, 34–40. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The Development and Evaluation of the Earth Gravitational Model 2008 (EGM2008) (vol 117, B04406, 2012). J. Geophys. Res.-Solid Earth. 2013, 118, 2633. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010); Bureau International des Poids et Mesures Sevres: Sèvres, France, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Soffel, M.; Klioner, S.A.; Petit, G.; Wolf, P.; Kopeikin, S.M.; Bretagnon, P.; Brumberg, V.A.; Capitaine, N.; Damour, T.; Fukushima, T.; et al. The IAU 2000 resolutions for astrometry, celestial mechanics, and metrology in the relativistic framework: Explanatory supplement. Astron. J. 2003, 126, 2687–2706. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sosnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2017, 22, 11. [Google Scholar] [CrossRef]
- Sośnica, K.; Thaller, D.; Dach, R.; Steigenberger, P.; Beutler, G.; Arnold, D.; Jäggi, A. Satellite laser ranging to GPS and GLONASS. J. Geod. 2015, 89, 725–743. [Google Scholar] [CrossRef] [Green Version]
- Tan, B.; Yuan, Y.; Wen, M.; Ning, Y.; Liu, X. Initial Results of the Precise Orbit Determination for the New-Generation BeiDou Satellites (BeiDou-3) Based on the iGMAS Network. ISPRS Int. J. Geo-Inf. 2016, 5, 196. [Google Scholar] [CrossRef]
- Deng, Z.; Fritsche, M.; Uhlemann, M.; Wickert, J.; Schuh, H. Reprocessing of GFZ multi-GNSS product GBM. In Proceedings of the IGS Workshop, Sydney, Australia, 8–12 February 2016; pp. 8–12. [Google Scholar]















| Items | Description |
|---|---|
| Processing scheme | IF double-difference network processing |
| Solar radiation | ECOM 5-parameter model |
| Sampling interval | 180 s |
| Cut-off angle | 3 degrees |
| Tropospheric delay | GPT model, GMF mapping function, two-hourly ZTDs [42,43] |
| A priori ERP | IERS Bulletin A and continuous piecewise linear function [44] |
| Attitude | Yaw-steering always assumed for all sat |
| Ambiguity | Real constant value for each ambiguity arc |
| PCO/PCV(Sat) | GPS, GLONASS: PCO and PCV from IGS; Galileo: PCO and PCV from ESA; BeiDou, QZSS: PCO from IGS MGEX |
| PCO/PCV(Rec.) | GPS, GLONASS: IGS PCO and PCV; new GNSS: adopted from GPS L1 and L2 |
| Update frequency | 6 h |
| A priori orbits | Broadcast ephemeris |
| A priori coordinates | Previous 3-day solution, strong constraint (0.01, 0.01, 0.01) m |
| Earth gravity | EGM2008 12 × 12 [45] |
| Solid earth tide and pole tide | IERS2010 [46] |
| Ocean tide | FES2004 [47] |
| Nutation model | IAU2000 [48] |
| N-body gravitation | Sun, moon, and other planets (DE405) |
| Relativity effect | IERS2010 [46] |
| Sys | Frequency | Signal | ||
|---|---|---|---|---|
| Band | MHz | Phase/Code | ||
| G | L1 | 1575.42 | L1C/C1C | L1W/C1W |
| L2 | 1227.60 | L2W/C2W L2S/C2S L2C/C2C | L2X/C2X L2L/C2L L2D/C2D | |
| G1 | 1598.0625 | L1C/C1C | ||
| −1608.75 | L1P/C1P | |||
| G2 | 1242.9375 | L2P/C2P | ||
| −1251.25 | L2C/C2C | |||
| E | E1 | 1575.42 | L1X/C1X | L1C/C1C |
| E5a | 1176.45 | L5X/C5X | L5Q/C5Q | |
| C | B1 | 1561.098 | L1I/C1I | L2I/C2I |
| L2X/C2X | ||||
| B2 | 1207.14 | L7I/C7I | L7X/C7X | |
| J | L1 | 1575.42 | L1C/C1C | L1X/C1X |
| L2 | 1227.60 | L2X/C2X | L2L/C2L | |
| L2S/C2S | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, F.; Yuan, Y.; Tan, B.; Deng, Z.; Ou, J. The Preliminary Results for Five-System Ultra-Rapid Precise Orbit Determination of the One-Step Method Based on the Double-Difference Observation Model. Remote Sens. 2019, 11, 46. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010046
Ye F, Yuan Y, Tan B, Deng Z, Ou J. The Preliminary Results for Five-System Ultra-Rapid Precise Orbit Determination of the One-Step Method Based on the Double-Difference Observation Model. Remote Sensing. 2019; 11(1):46. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010046
Chicago/Turabian StyleYe, Fei, Yunbin Yuan, Bingfeng Tan, Zhiguo Deng, and Jikun Ou. 2019. "The Preliminary Results for Five-System Ultra-Rapid Precise Orbit Determination of the One-Step Method Based on the Double-Difference Observation Model" Remote Sensing 11, no. 1: 46. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11010046