3. Results
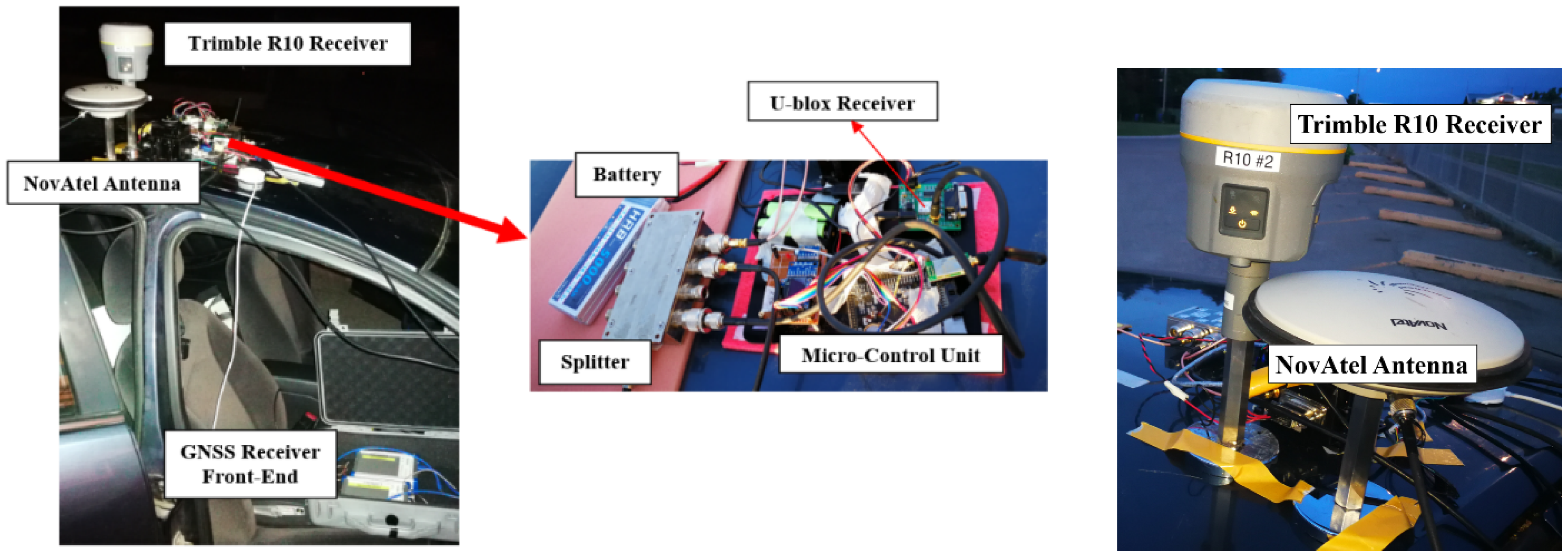
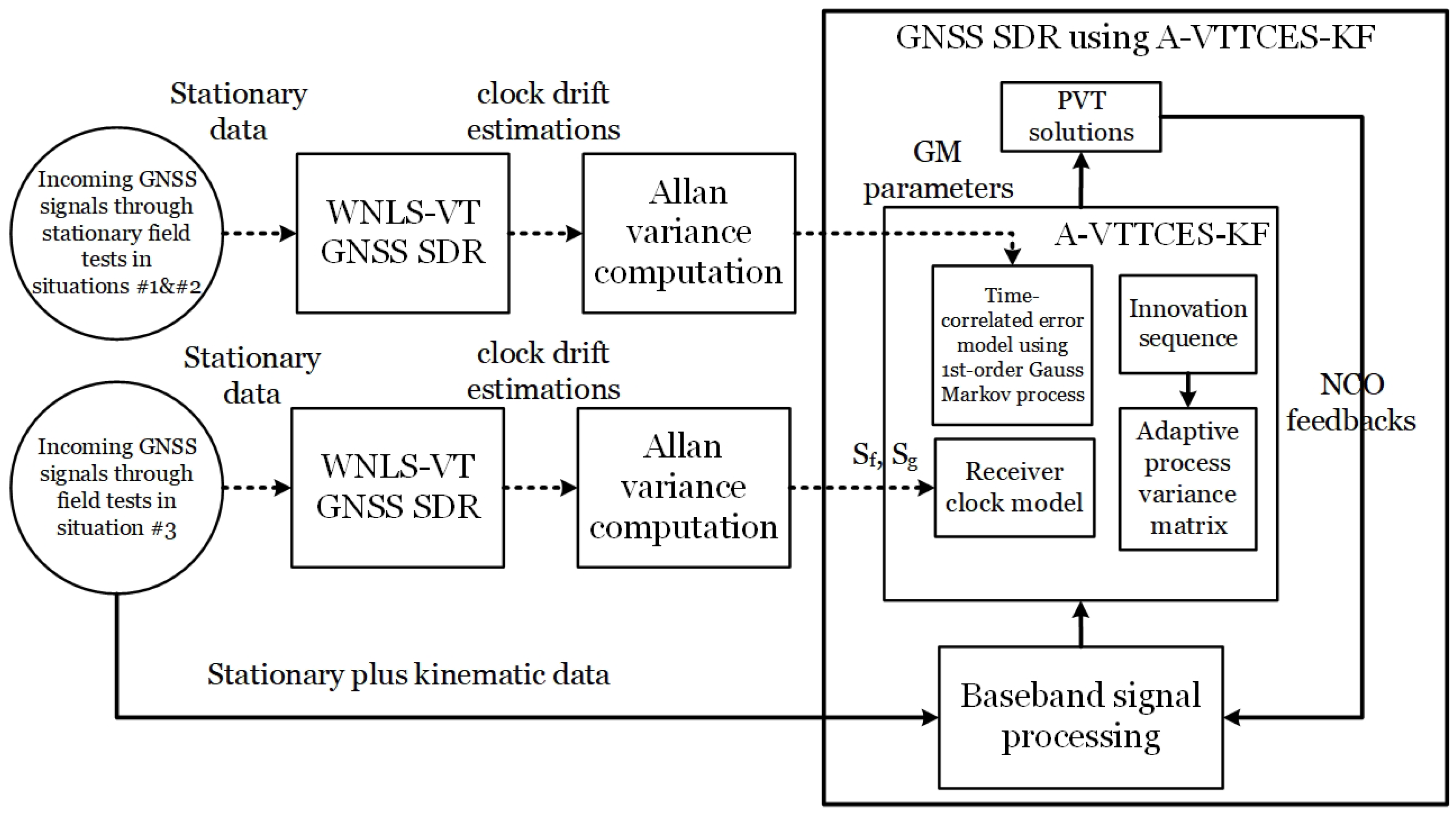
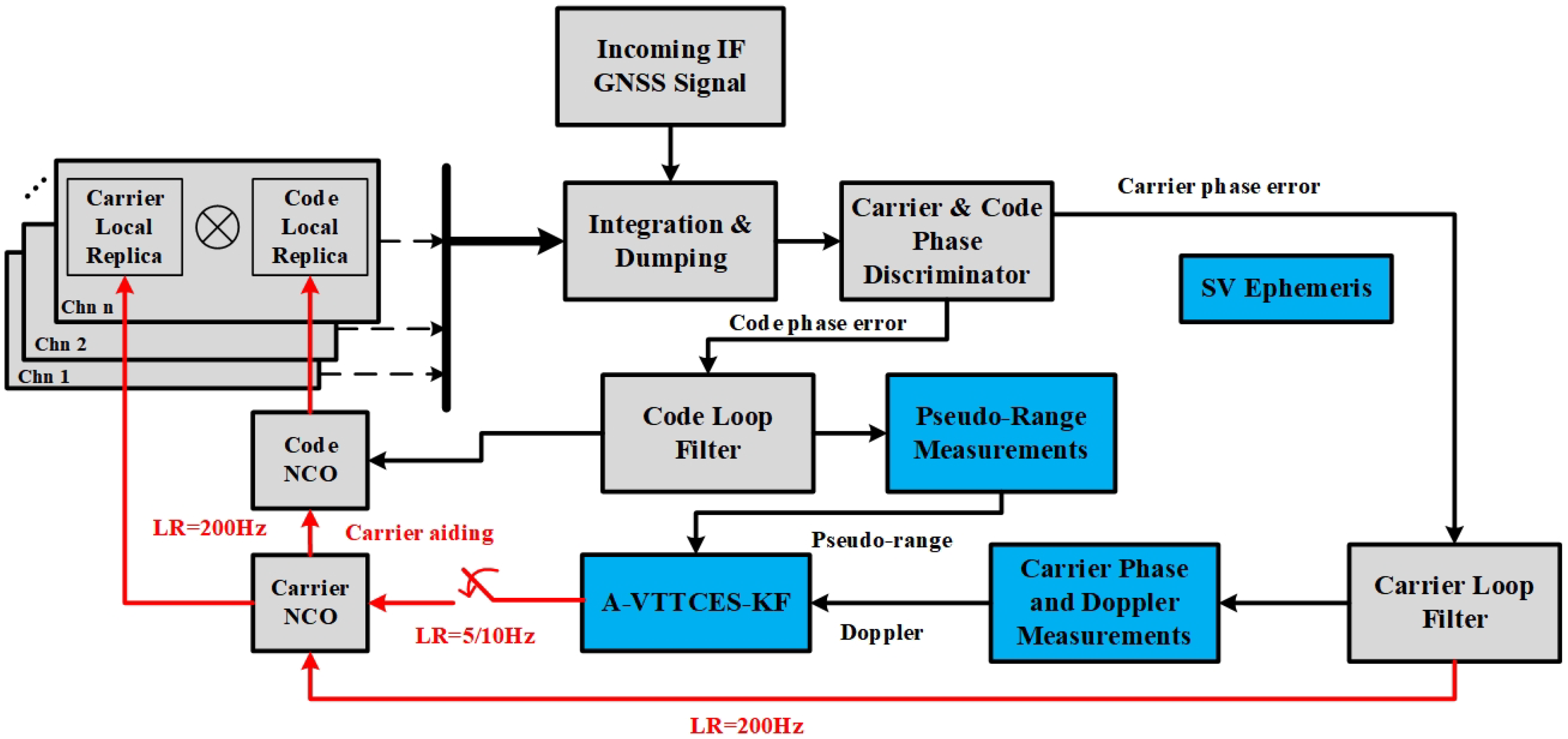
The setup for the field test based on the proposed A-VTTCES-KF is unchanged with the one for the stationary tests using the WNLS as illustrated in
Figure 2. Furthermore, the corresponding parameter definitions for the GNSS SDR in the experiment are listed in
Table 4.
Both the carrier-phase-based real-time kinematic (RTK) positioning solutions and pseudo-range-based differential global positioning system (DGPS) solutions will be produced using the open-source package program, RTKLIB [
77]. The related parameter settings for the RTK positioning algorithms are provided in
Table 5. Moreover, a short baseline which is far less than 20 kilometers is used in the field tests.
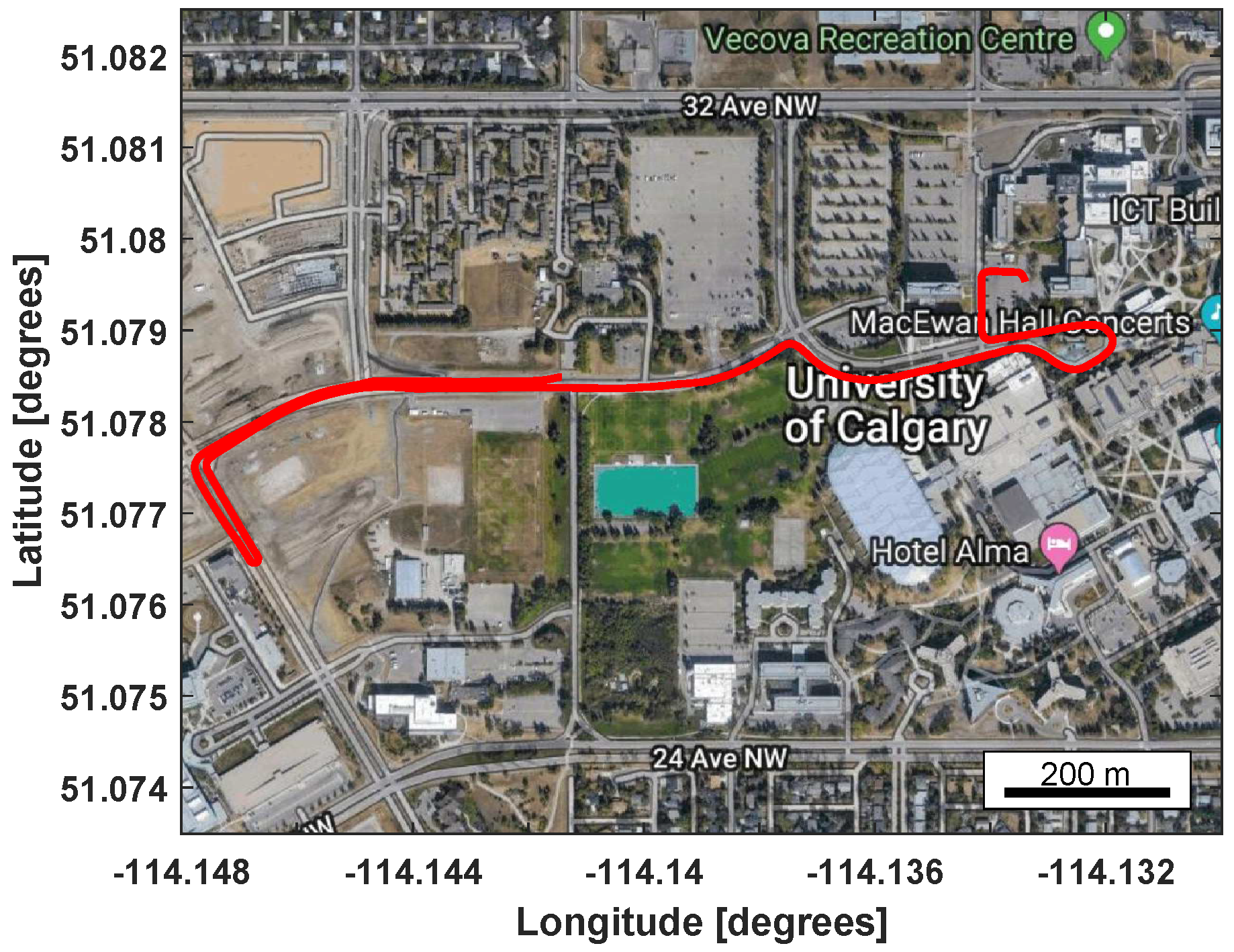
As shown in
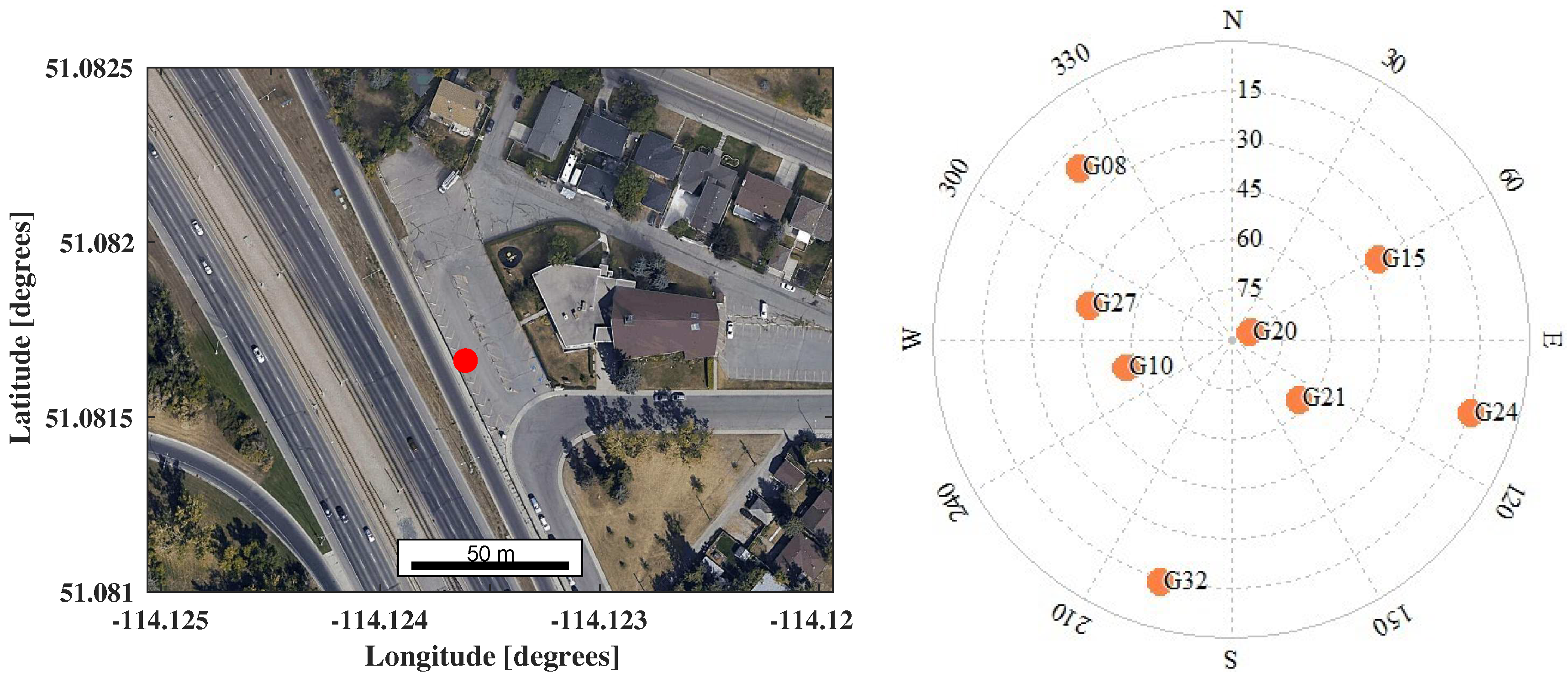
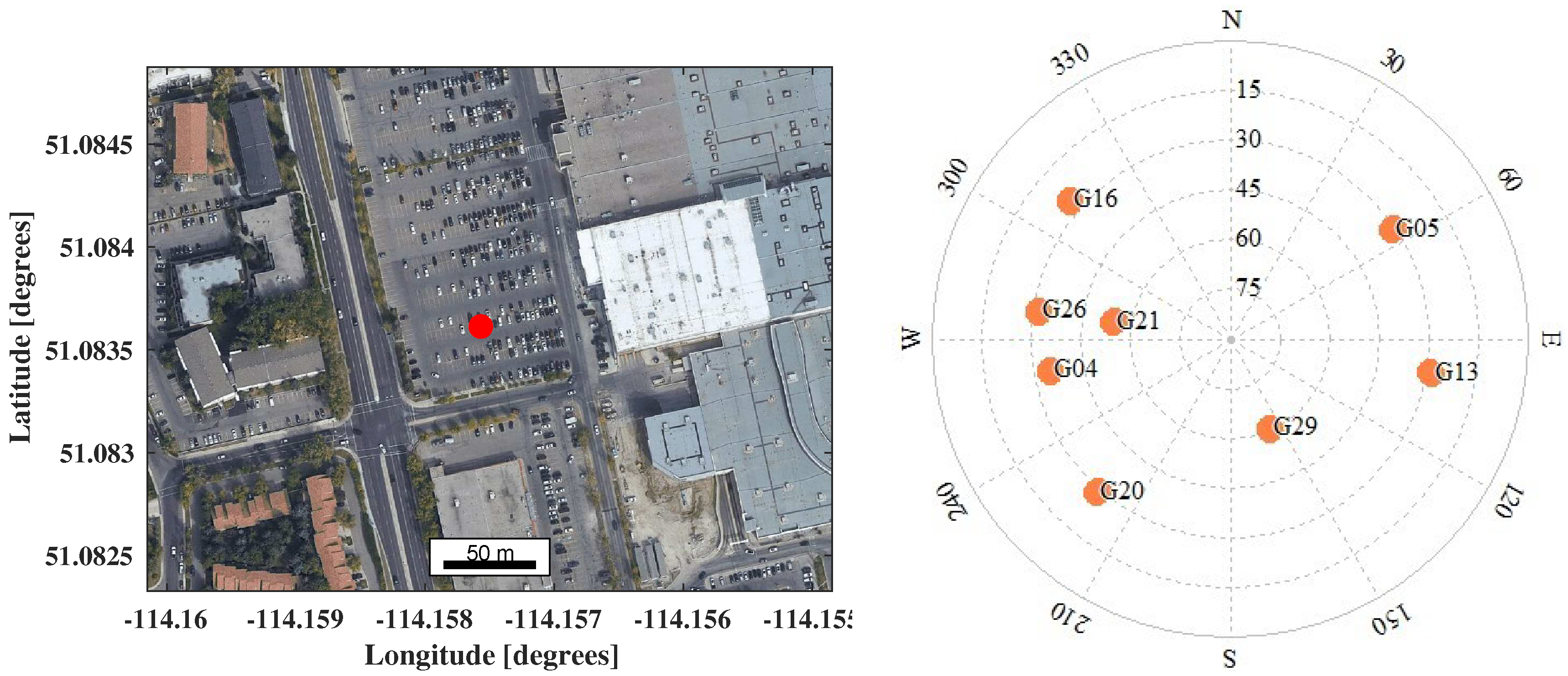
Figure 10, the trajectory is illustrated, and it is provided by the reference receiver of Trimble R10 in our work.
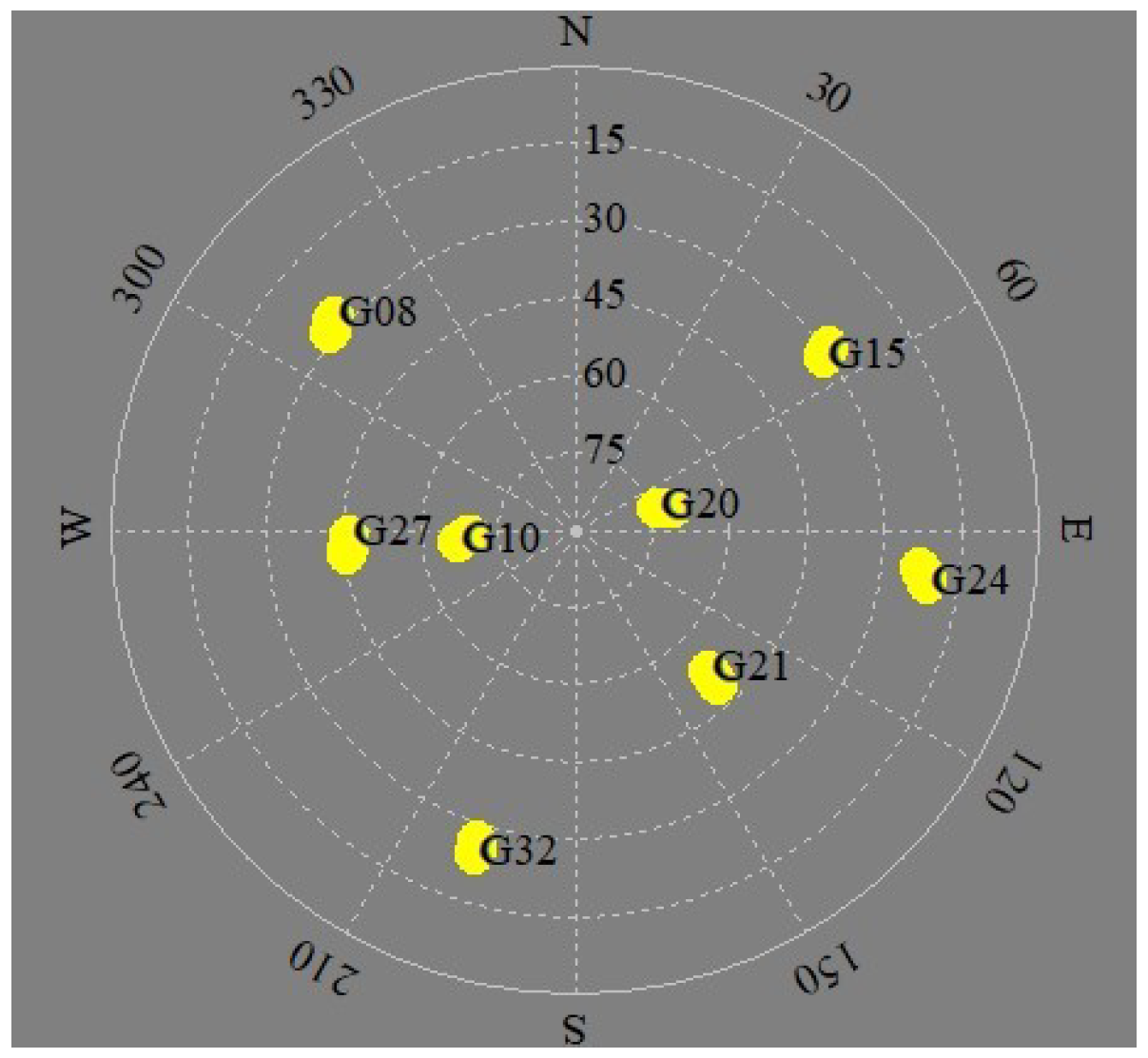
Figure 11 demonstrates the view of the sky plot for all the contributed GPS SVs in the experiment and eight satellites are included.
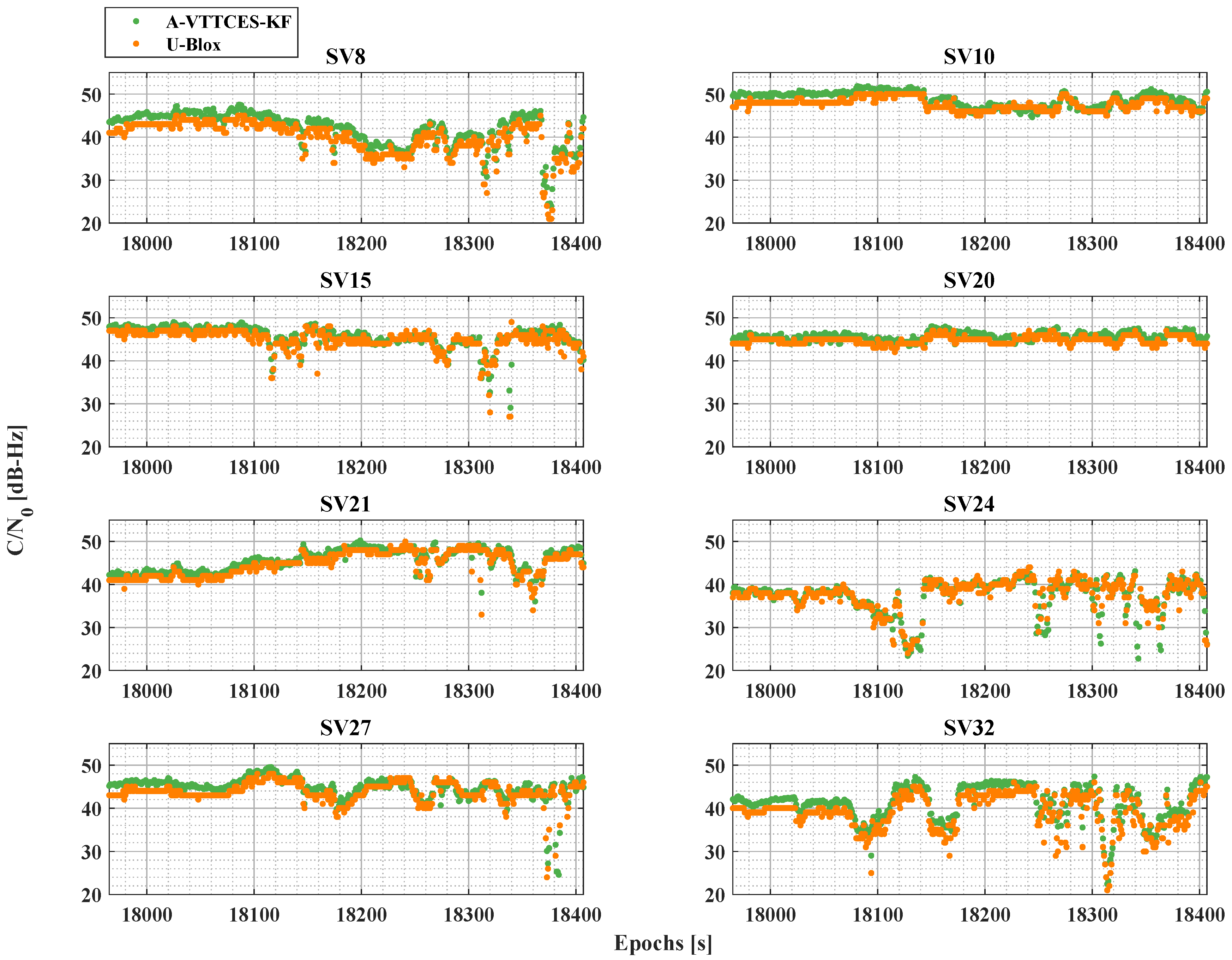
The trends of the signal power for all the tracking channels within the testing duration are provided in
Figure 12 where U-Blox represents the estimations produced by the low-cost commercial U-Blox receiver. The SV10, SV20 maintain stable
levels during the test due to the fact that they are embraced with the very high elevation angles. As to the other SVs from which the incoming GNSS signals are sometimes accidentally masked by the obstructions, e.g., the foliage and buildings during the whole testing. Furthermore, the received signals related to SV8, SV24, and SV32 are more frequently reduced by the environmental interference and blockage when compared with other signals, but the signal power can still be close to the level of the commercial U-Blox receiver in which the re-acquisition algorithm must be applied to confirm a high competition ability in the fierce commercial markets. It implies that the tracking performance of the GNSS receiver can highly be improved with the VT technique.
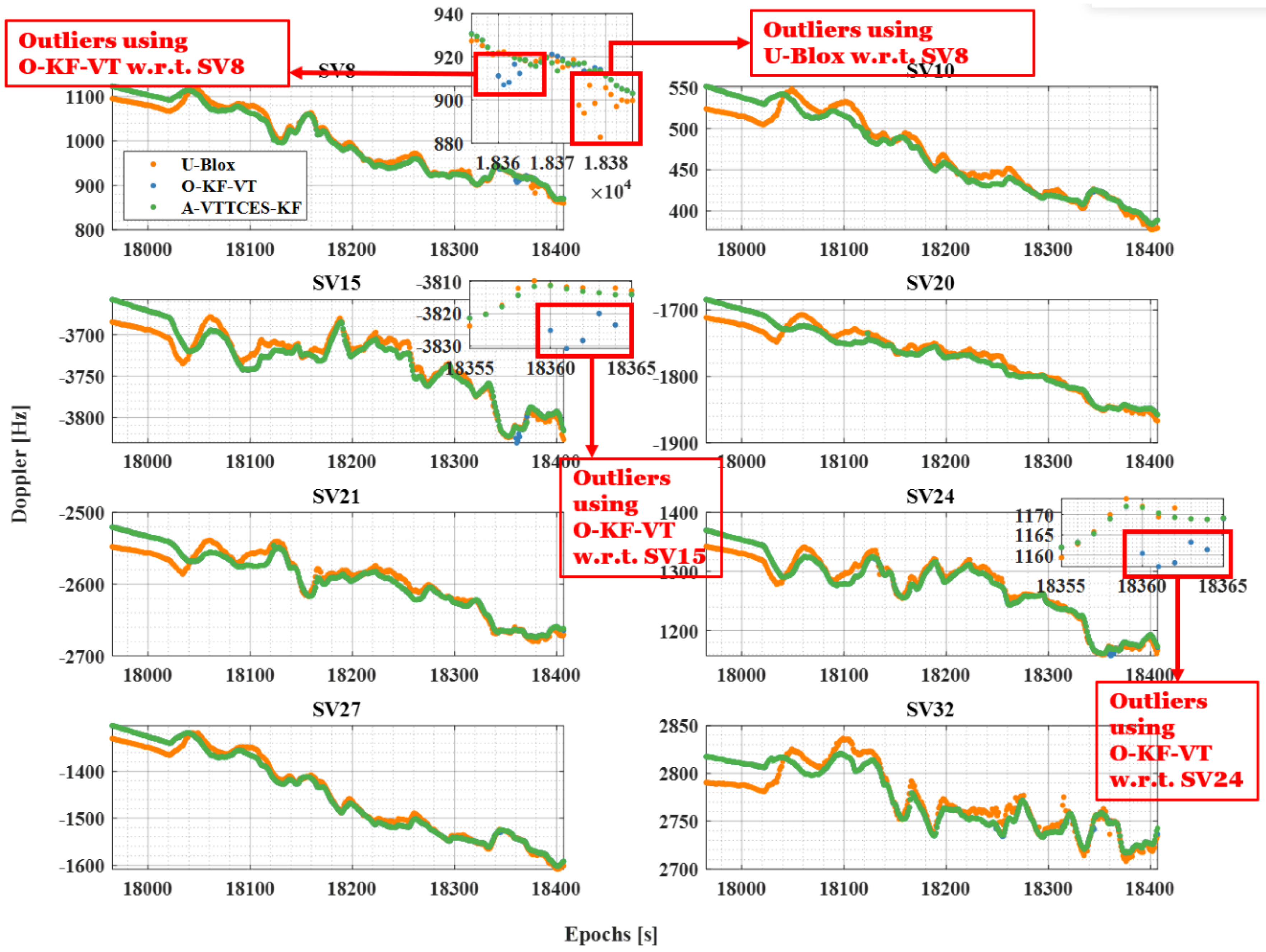
The Doppler estimation curves for all the used SVs are plot in
Figure 13, where O-KF-VT denotes the estimations based on VT-based SDR using the ordinary adaptive KF algorithm regardless of compensating the time-correlated error. During the beginning dozens of seconds, there is a fixed bias Doppler error between the VT-based GNSS SDR and the U-Blox receiver in terms of all the satellites, since it takes some time for the KF to converge. When the convergence procedure is done, the Doppler measurement value of which the quality is highly dependent on the accuracy of the clock drift estimation can be gradually close to the values produced by the U-Blox receiver as far as possible. According to the zoomed-in pictures which is displayed in
Figure 13, related to SV8, SV15, and SV24, the Doppler outliers are more possibly induced by the ordinary adaptive KF algorithm and the one provided by the U-Blox receiver, while the A-VTTCES-KF manages to maintain producing the Doppler measurements with the higher quality when compared with these two traditional approaches.
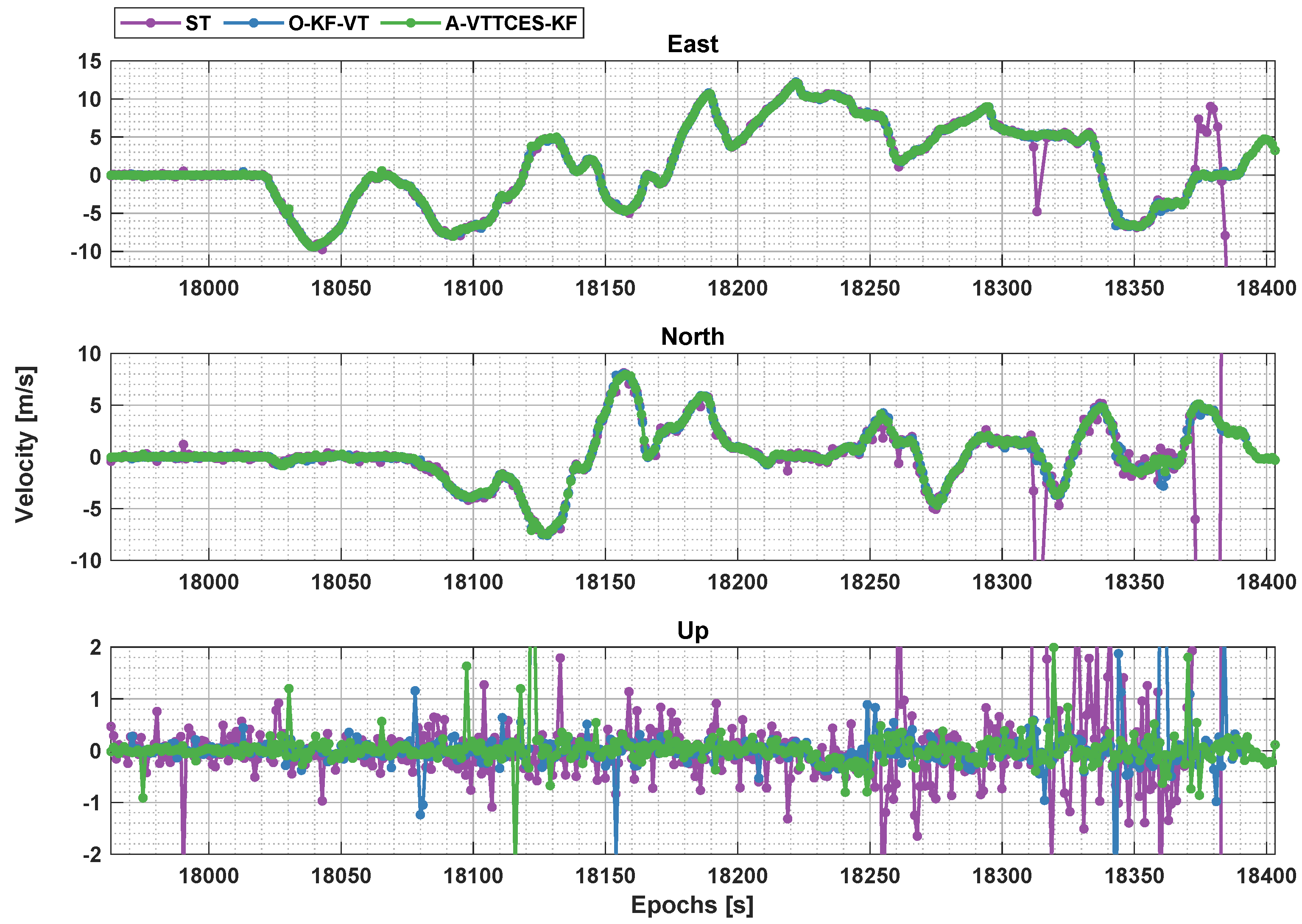
The velocity estimations through different algorithms are plot in
Figure 14, where ST stands for the scalar tracking results of the GNSS SDR, and A-VTTCES-KF denotes the proposed algorithm as mentioned earlier. The tested ground vehicle was not moving at the first sixty seconds. After that, the autonomous vehicle started to move. The maximum absolute velocities in the east and north were approximately at 13 m/s and 9 m/s, respectively. The velocity estimation fails to be produced by the ST SDR after 18,370 s. Furthermore, it can also be found that there is a large estimation slip at around 18,310 s in the implementation process of the ST SDR.
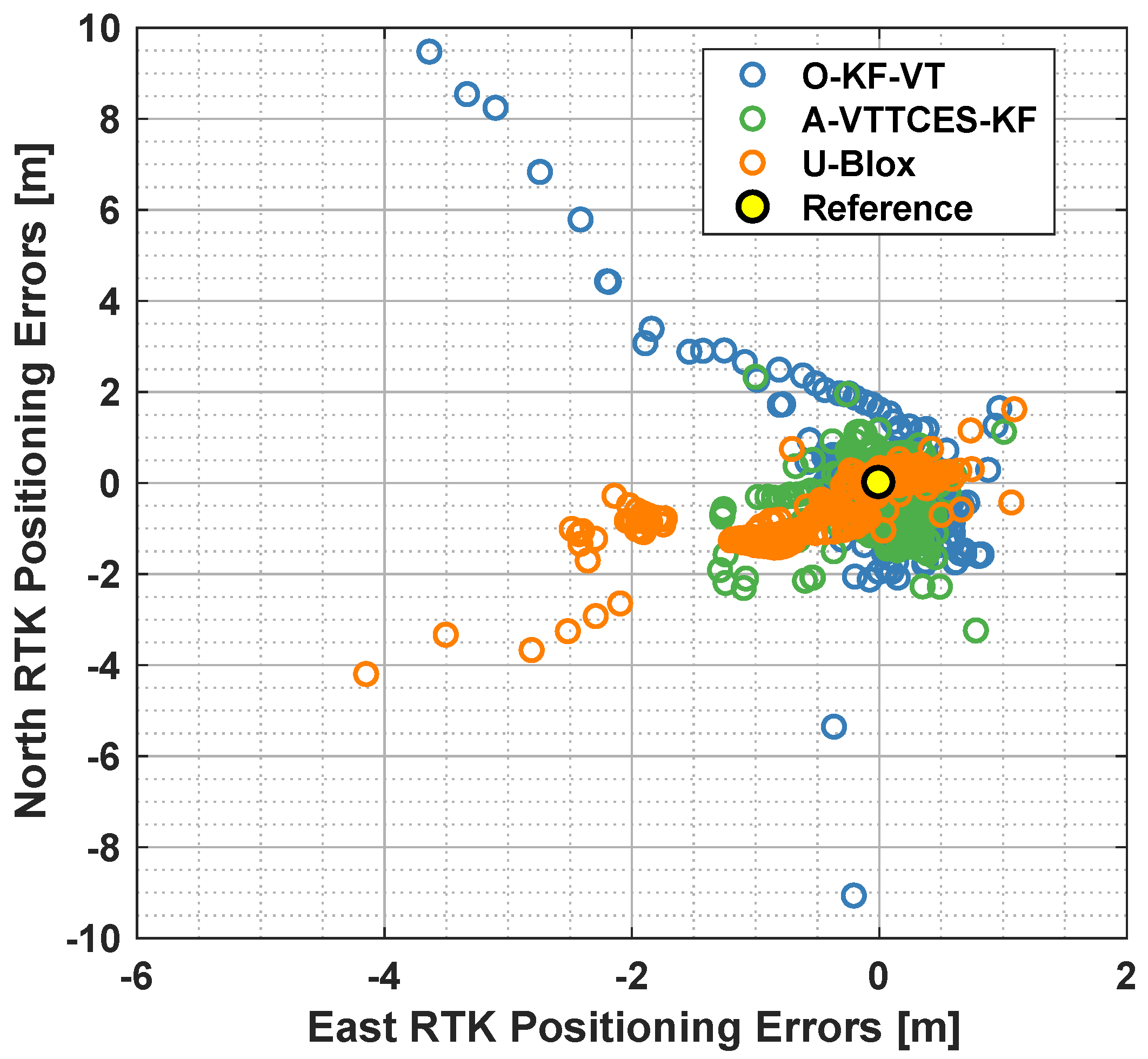
The error distributions produced by the RTK positioning method in the horizontal plain of the local level frame are illustrated in
Figure 15. The error estimations output by the U-Blox receiver are also provided as the comparison. As shown in the figure, the number of the outliers are reduced by the proposed A-VTTCES-KF when compared with the ordinary KF algorithm.
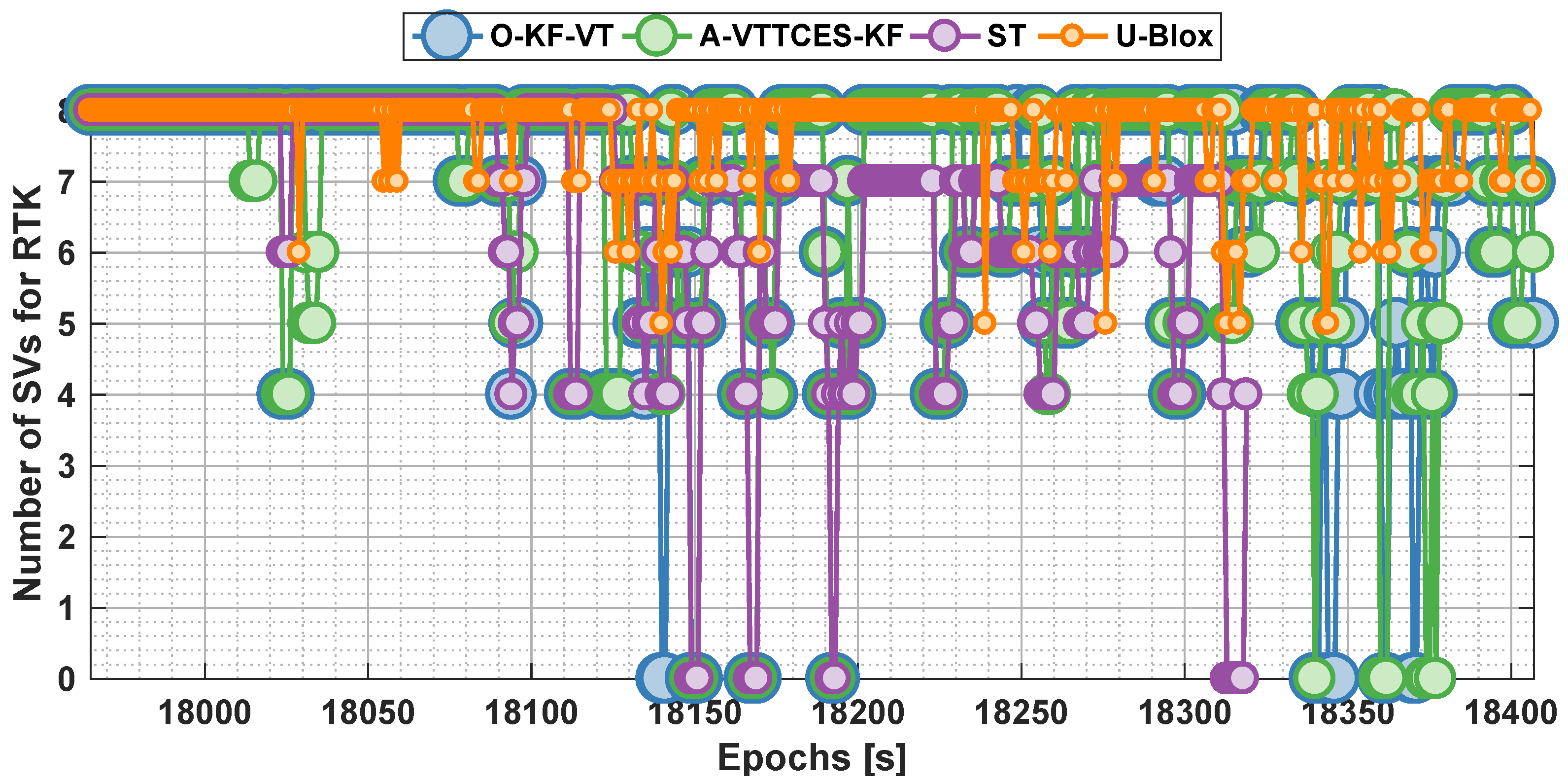
The curves in terms of how the number of satellites contributing to the PVT solutions changes with the spanning of the navigation epochs are displayed in
Figure 16. Referring to
Figure 12, apart from SV10 and SV20, the power loss of the other satellites occurred due to the blockages in the environmental place from the GPS time of 18,250 s to 18,350 s. The ST-based GNSS SDR failed to neither keep tracking most of the navigation satellites nor output the PVT solutions during and after this period. Nevertheless, the degraded numbers of satellites rise back again after some durations with severely environmental interferences in the VT GNSS SDR. On the other hand, although the SDR using the VT algorithms, i.e., O-KF-VT and A-VTTCES-KF, is not as robust as the commercial and self-contained U-Blox receiver, the tracking loops assisted with the VT technique are more than enough to tolerate the weak situation for much longer time when compared with the traditional scalar tracking architecture.
Since the field test is implemented in a moving autonomous ground vehicle, the dynamic stress residuals after the VT assistance on the tracking loop could be larger than the ones produced by a static receiver user. Hence, the bandwidth of the PLL is set to 5 Hz to make a trade-off between the tolerance in terms of the wide range of the dynamics caused by the moving vehicle and the reduction of the random noise through the PLL thermal noise jitter [
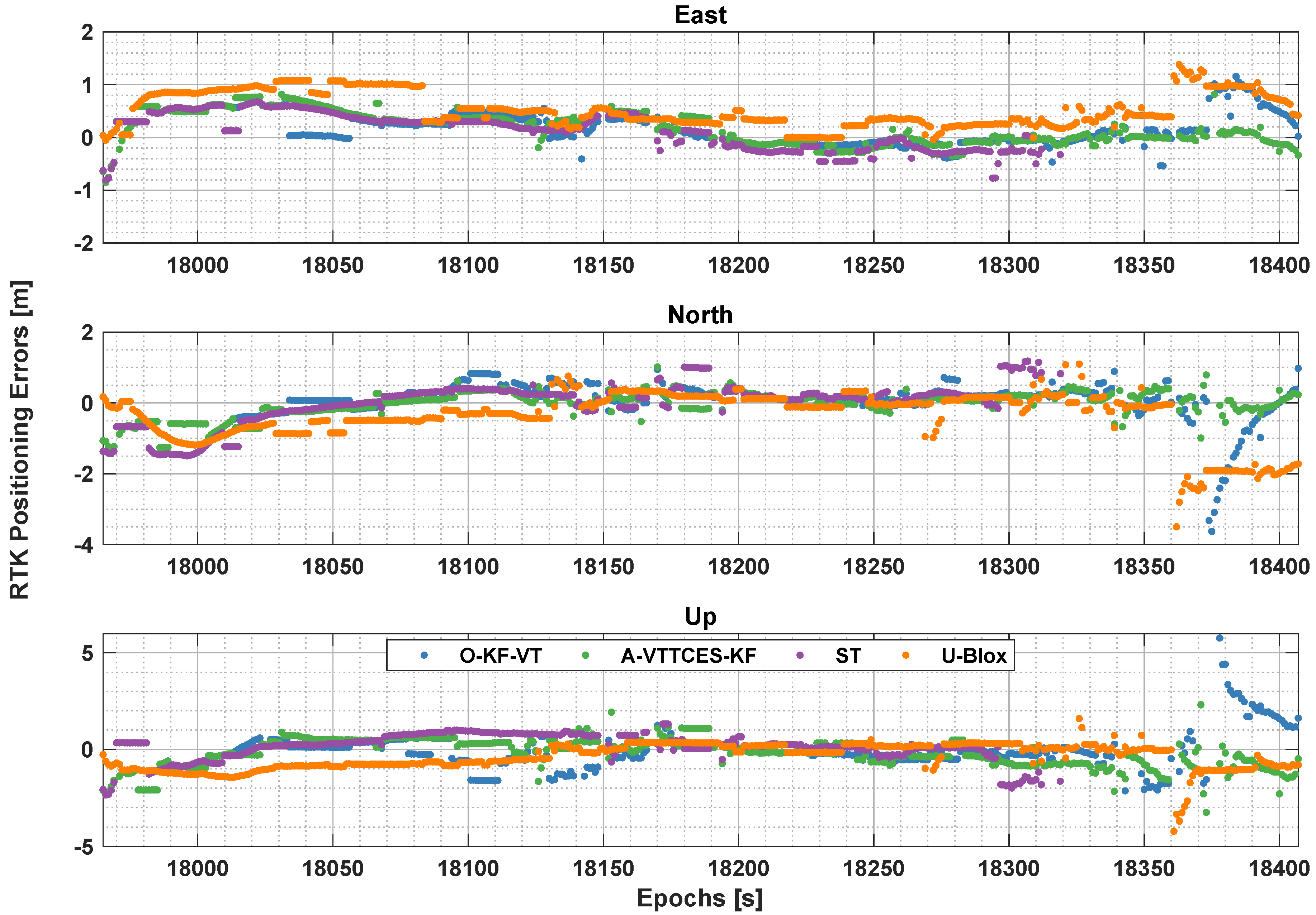
42]. The 5 Hz is chosen as the value of the VT LR, by which to give a trade-off in decreasing the VT-induced time-correlated error and the dynamics-induced error residuals on the PLL. Then, the results related to the RTK positioning errors are illustrated in
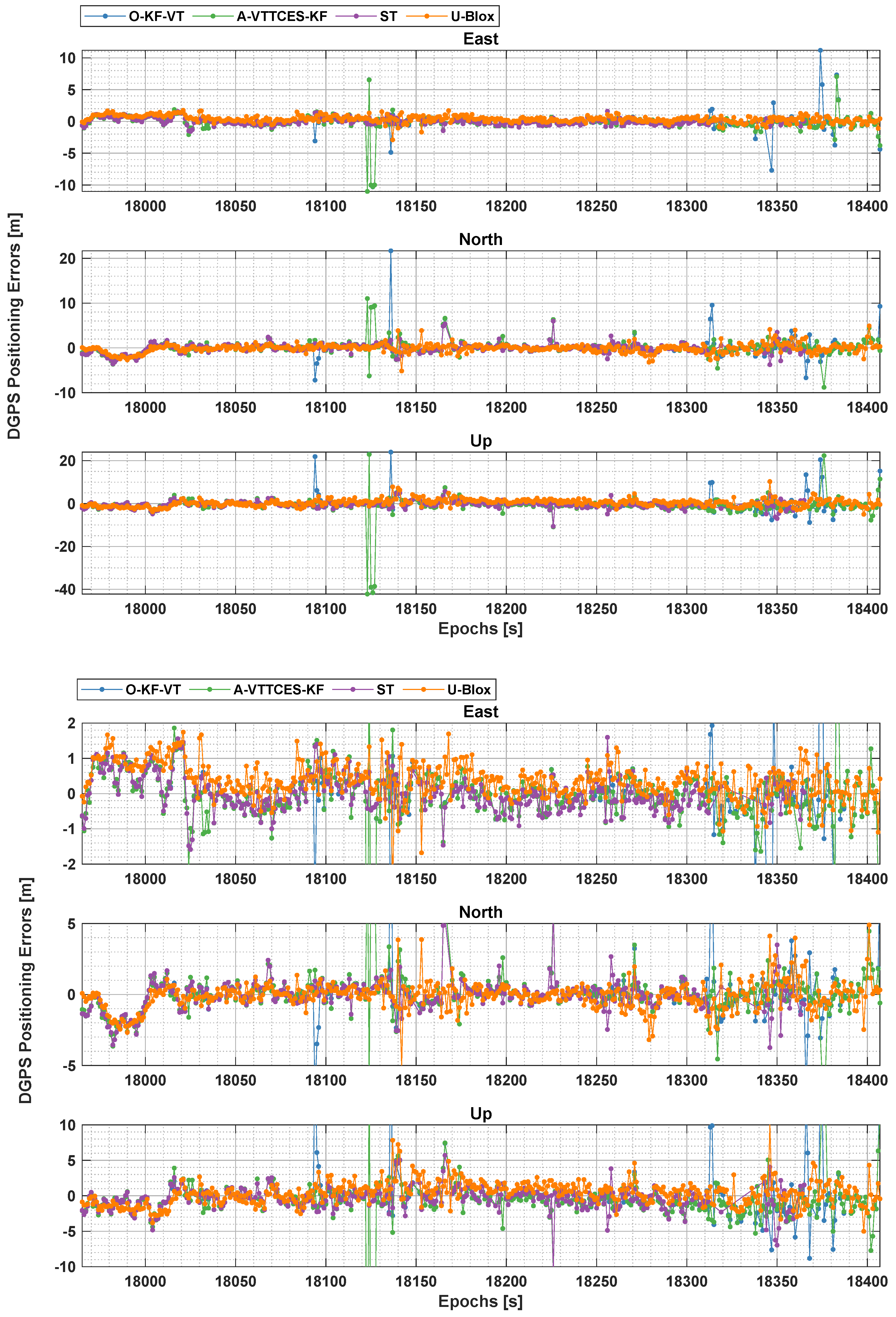
Figure 17. The RTK positioning performance is determined with the quality of the carrier phase measurements. Besides, the results of the DGPS positioning error relying on the pseudo-range observations are also provided in
Figure 18. The re-acquisition algorithms are not integrated in the GNSS SDR for our research as listed in
Table 4. The continuous positioning solutions produced by the ST SDR are cut off at around 18,320 s and the receiver stops working from such time on, while the VT SDR as well as the U-Blox receiver can keep outputting the positioning results over the whole field test duration. Furthermore, the environmental condition is severe, the ordinary adaptive KF is possibly more sensitive to the weak power level and result in more outliers than the proposed A-VTTCES-KF. Some similarities, about which the positioning solutions are more likely to be biased in the weak and interfered environment, simultaneously occur between the GNSS SDR using the O-KF-VT algorithm and the U-Blox receiver as shown in
Figure 17.
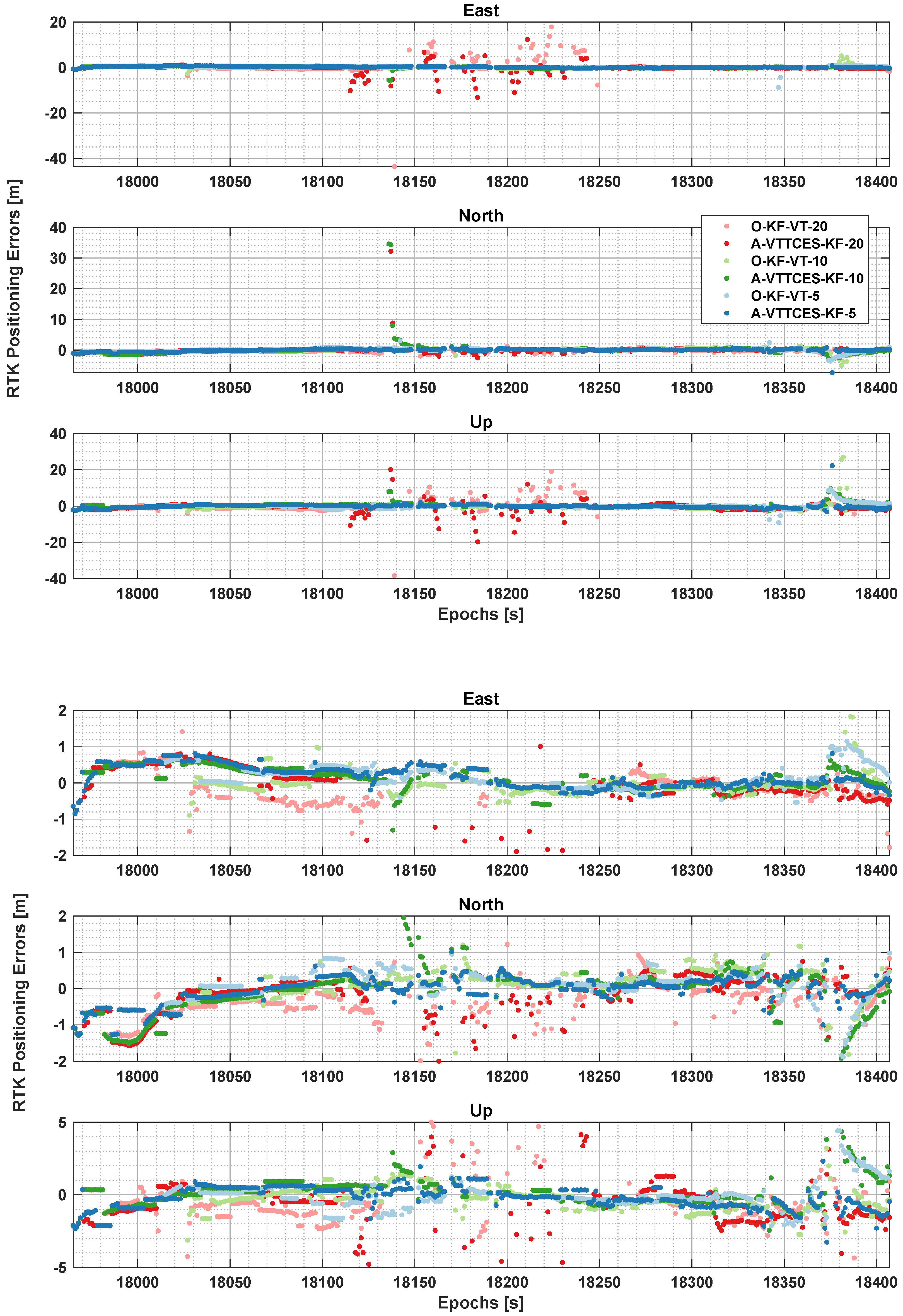
Both the A-VTTCES-KF and the O-KF-VT algorithms with different VT LRs, i.e., 5 Hz, 10 Hz, and 20 Hz, are also evaluated and compared using RTK and DGPS positioning algorithms. The results coming from the RTK methods are provided in
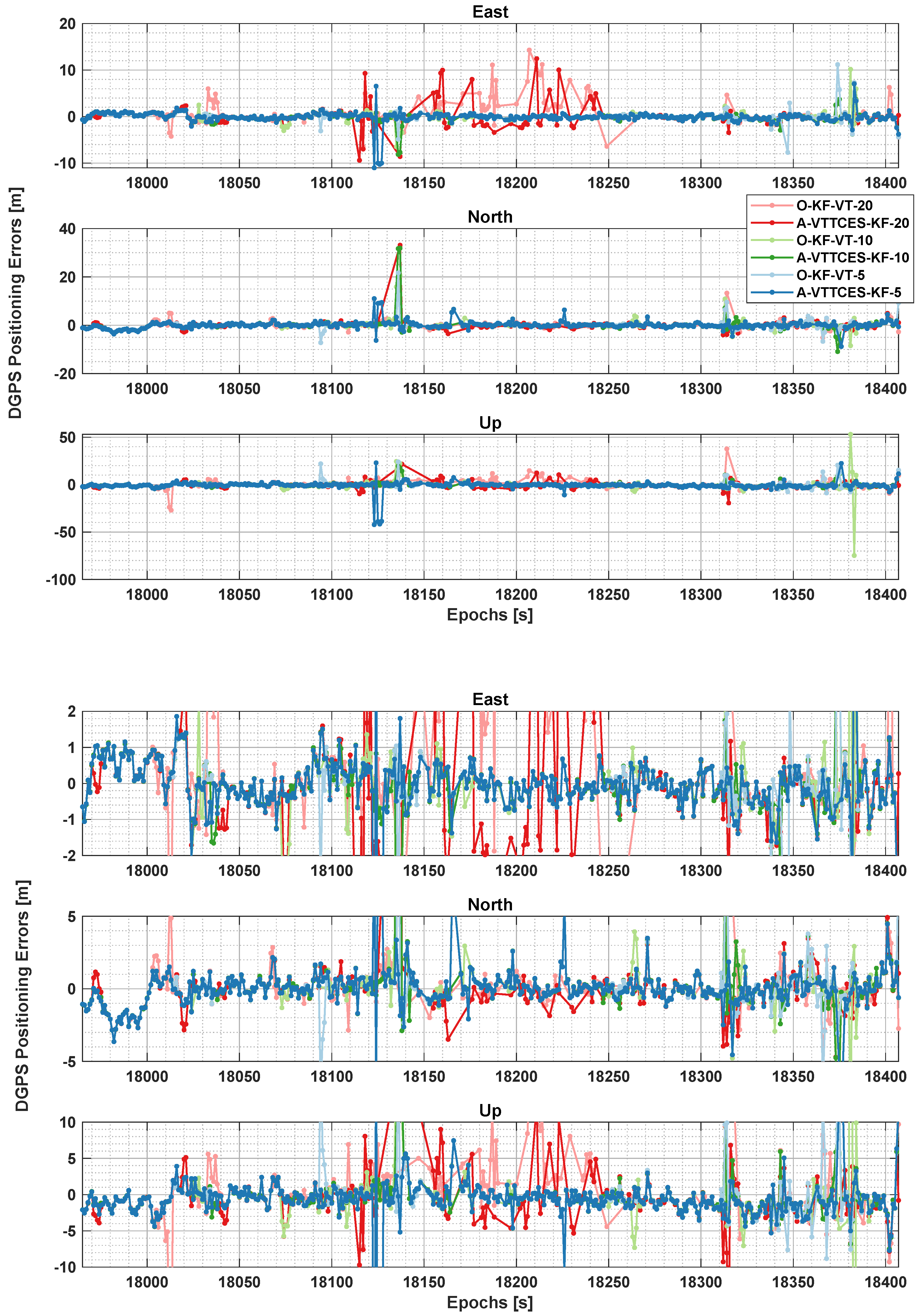
Figure 19, while the ones associated with the DGPS approaches are depicted in
Figure 20. When the VT LR increases to 20 Hz, the A-VTTCES-KF and the O-KF-VT architectures are proved to fail to provide the reliable positioning solutions during the period ranging from 18,110 s to 181,250 s. As shown in
Figure 14, the resultant velocity exactly started to become larger at the epoch of 18,110 s. Hence, it can be verified that the value of 20 Hz generally exceeds the tolerance range of the VT LR, applied to the A-VTTCES-KF as well as the O-KF-VT, for a moving ground vehicle. A smaller value related to the VT LR in this work should be used and it is more reasonable to be applied in our proposed algorithms.
4. Discussion
Maximum eight SVs contribute to the carrier-based and code-based positioning estimation processes for the GNSS SDR and the commercial U-Blox receiver in the field test in this work. The
levels have been evaluated in the experiment, and the corresponding results are illustrated in
Figure 12. With the assistance of the VT loop and the receiver velocity feedbacks, the tracking loop processing the satellite signal which are confronted with the signal masking problems can manage to tolerate the weak environment for a long time, e.g., the signals from SV8, SV24, and SV32. None of the acquired channels suffers from a signal loss in tracking procedure, and all the channels is being tracked through the whole time spanning of the field test in this work. It can be verified that, the proposed A-VTTCES-KF takes full advantages of the VT technique to help all the tracking channels, without the re-acquisition algorithm, keep working as what the self-contained commercial U-Blox receiver fulfills in a GNSS-challenged environment. Hence, the tracking robustness has been proved to be significantly improved by the A-VTTCES-KF technique.
Figure 13 depicts the Doppler estimation results. As mentioned before, the proposed algorithm can remove more unexpected blunders than the ordinary adaptive KF and the baseband signal processing method in the U-Blox receiver. The same conclusions can be drawn through the plots and results in
Figure 15. In other words, it can be stated that the A-VTTCES-KF can provide more reliable Doppler observations. Also, the Doppler estimation, which the carrier NCO associated with the PLL updating accounts for, is made use of by the production of the pseudo-range measurement, such that the code-based observation quality is assured to be simultaneously enhanced through the proposed A-VTTCES-KF.
The velocities along the east, north, and up directions are illustrated in
Figure 14, which indicates that the tested autonomous car is moving and kinematic. Such testing condition could be comparatively challenging and more than enough to verify the performance of the proposed algorithms in this research.
The self-designed GNSS SDR sometimes embraces less satellites for positioning than the U-Blox receiver as shown in
Figure 16, but it does not mean that the tracking channels which do not participate in positioning perform worse than the counterparts in the U-Blox receiver. Since the GNSS SDR is less self-contained than the U-Blox receiver due to the discrepancy in terms of the entire design strategy. However, this work is not our contribution in the research, and the related information will be not involved with the subsequent discussions. Carrier-based and code-based positioning performances with different algorithms are compared in the experiments and the associated results are plot in
Figure 17 and
Figure 18, respectively. The positioning results depending on different VT LRs, i.e., 5 Hz, 10 Hz, and 20 Hz, are also computed during the post processing process, and the error curves with respect to the GPS time spanning are displayed in
Figure 19 and
Figure 20. Since the blunder positioning results could dramatically reduce the accuracy, and such ambiguous results with the contributions of the outliers cannot exactly reflect the real discrepancy among the proposed A-VTTCES-KF and the other ordinary methods. The three-sigma (3
) rule is adopted to get rid of the unexpected and erroneous solutions, after which the remained positioning data series are subsequently exploited to obtain the corresponding root-mean-square errors (RMSEs). Assuming that the positioning errors follow the Gaussian white noise distribution, the 3
thresholds, which 99.7% of the absolute positioning errors should be no more than, can accordingly be approximately judged through the plot error curves from
Figure 17 to
Figure 20. The values in terms of the positioning RMSE are summarized and listed in
Table 6, where E, N, U, and All represent the positioning errors along the east, north, up or vertical directions, and the resultant values through these three directions, respectively. Some states can be announced through the listed information which be subsequently discussed.
Firstly, the results on the condition that the VT LR is equal to 5 Hz will be discussed. As to the RTK positioning results, although positioning accuracies through both the O-KF-VT and the proposed A-VTTCES-KF in the vertical direction are faced with slight reductions, they have large improvements in the east and north directions compared with the solutions of the U-Blox receiver, as well as the resultant positioning results of these two algorithms are superior to the counterparts of the commercial receiver. In addition, the positioning performances produced by the A-VTTCES-KF exceeds the results obtained from the O-KF-VT in all directions. On the other hand, the O-KF-VT and A-VTTCES-KF positioning accuracies using the code-based DGPS algorithm are very close to each other in the east direction, while the latter performs better than the former in the east and up directions. In addition, the eastern DGPS positioning results produced by the VT-based SDR perform slightly better than the solutions estimated from the U-Blox receiver, while the positioning estimations along the other two directions using the SDR have a slightly worse performance.
Secondly, the positioning solutions using 10-Hz VT LR will be subsequently analyzed, and they will also be made comparisons with the ones produced by the VT-based SDR with the LR value of 5 Hz. The general results with respect to the RTK positioning using the A-VTTCES-KF show small reductions of the performance in the northern direction when compared with the O-KF-VT, but positioning accuracies are still gained in other two directions. Besides, the eastern and northern solutions produced by the U-Blox receiver are obtained in a weaker quality than the VT GNSS SDR, while the up-direction results are inversely addressed better than the solutions computed with the algorithms based on such VT mode. With regard to the DGPS estimations, the positioning results using the A-VTTCES-KF SDR outperform the solutions offered by the O-KF-VT system towards all the axes in the local level frame. Furthermore, a similarity in terms of the DGPS positioning results between the 10-Hz-VT-LR SDR and the U-Blox receiver can be found, when compared with the previous discussions on the comparisons related to the 5-Hz-VT-LR SDR and the U-Blox one.
A summary for the improved performances using the A-VTTCES-KF technique is listed in
Table 7, where O-KF-VT in this table corresponds to the improvement percentages when the proposed algorithm is in comparison with the O-KF-VT algorithm; U-Blox denotes the counterparts with respect to the algorithm implemented by the U-Blox receiver. Some conclusions can be drawn through the results in this table.
Regarding the case using 5-Hz-VT-LR SDR, some discussions can be stated as follow.
Firstly, the A-VTTCES-KF outperforms the O-KF-VT in terms of the listed positioning results for most of the cases. Hence, the proposed algorithm can be confirmed that it is efficient on the error suppression. For example, the overall RTK positioning performance has been improved by 14.17%, while the positioning accuracy of the DGPS algorithm has a gain of 9.73%.
Secondly, the A-VTTCES-KF has a more distinctive superiority towards the north and up directions, while there are few accuracy improvements in the eastern axis. Some analysis will be subsequently given to explain the phenomenas. As mentioned earlier, the time-correlated error induced by the VT technique is tightly coupled with the clock drift estimations which are highly associated with the constitution of the Doppler measurements. Paying attention to the sky plot of the satellites in the kinematic field test as illustrated in
Figure 11, more SVs are distributed along the east-west direction. As we know, the position accuracy is dependent on the dilution of precision (DOP) corresponding to the expression,
, where
denotes the measurement design matrix [
42]. This fact leads to the consequence that the clock drift residuals will be averaged along the east direction in the positioning estimation. Referring to
Figure 11 and
Figure 12, the signal power of SV32, which is shown to be significant of guaranteeing an adequate DOP distribution along the south-north direction, is severely reduced by the environmental interference at most of the time in the field test. Such that the positioning accuracies, especially related to the carrier-based positioning algorithms, will be highly degraded in terms of the northern direction. Because the clock drift errors are intimately added to the northern positioning results. As far as we know, the positioning accuracy in terms of the up direction is always highly influenced by the clock estimation results, since there must be no satellite distributed on or under the ground. This fact will not only decrease the positioning accuracy, but also tie the performance of the clock errors tightly to the positioning solutions, in terms of the height. Again, the time-correlated error coupled in the clock drift estimations could be suppressed by the proposed A-VTTCES-KF, so, the northern and vertical carrier-based positioning results, which have a close relationship with the clock drift noise error as explained earlier, will gain more distinctive improvements, when compared with the ones in terms of the eastern positioning results. The theoretical analysis has been proved to be consistent with the experimental results as listed in
Table 7.
Thirdly, it can also be found that, the code-based DGPS positioning results, though, embrace similar improvement trends as the RTK solutions do, the increasing rates are smaller than the ones obtained from the RTK algorithm. As we know, the code-based positioning results are more likely to be relied on the clock bias estimations, and the carrier-based ones are more possibly dependent on the clock drift estimations. The clock bias can be assumed to be equivalent to the integration of the clock drift, and the integration time is identical to the update interval of the positioning estimation process. In other words, the clock drift passing through a resembling low-pass filter produced by the integration implementation gives the clock bias, and the time-correlated error will be reduced through this process. Therefore, it is reasonable that the DGPS positioning results have a slower improvement rate when compared with the RTK method.
Fourthly, there are significant increases in RTK positioning accuracy along the east and north directions when compared with the solutions produced by the U-Blox receiver, while a slight decrease in vertical accuracy occurs. The bandwidth of the PLL becomes smaller on the condition that a VT loop is involved in the GNSS SDR. For example, the bandwidth of the PLL applied to the ST loop is set to 18 Hz while the bandwidth with respect to the VT loop shrink to 5 Hz for our GNSS SDR in this research. The RTK solutions are more sensitive to the performance of the PLL and the estimation accuracy of the local clock drift due to the characteristics of the receiver design [
42]. The vertical positioning results are ultra-tightly coupled with clock error estimations due to the geometry of the satellite distribution in the vertical direction. There is no sign transition in terms of the cosine direction vector for the height, while the corresponding coefficient for the clock error estimation is equivalent to one. In this case, this fact leads to the consequence that the height positioning results are highly related to the clock error estimations. Other two directions’ positioning results do not meet the same issue as the vertical one does. It can be inferred that the clock estimation in our presented GNSS SDR is less accurate than the results computed with the U-Blox receiver. Hence, it is totally possible that the local clock in the GNSS SDR is too coarse to enhance the positioning performance in the height.
Fifthly, the code-based DGPS positioning performance is not only relying on the PLL, but also mostly determined by the DLL, multipath mitigation algorithms applied in the code discriminator, and the clock bias estimations. The commercial U-Blox receiver can be assured to exploit some advanced techniques inside the GNSS receiver design to confirm the pseudo-range measurement to maintain a relatively high quality. Still, the way to improve the performance of the pseudo-range observation is not the primary contribution in this work. Therefore, it is acceptable that the positioning results based on the DGPS algorithms can be addressed better using the U-Blox receiver than the SDR with the A-VTTCES-KF in the north and vertical directions.
Regarding the comparisons in terms of the GNSS SDR using 10-Hz-VT-LR and 5-Hz-VT-LR algorithms, some conclusions can be subsequently drawn.
Sixthly, it can be found that the positioning accuracies in the north and vertical directions for both RTK and DGPS algorithms decline when using 10-Hz-VT-LR GNSS SDR. Accordingly, we can infer that when the VT LR increases, it will be harder to get rid of the time-correlated error in the VT loop through the proposed algorithm.
Finally, the eastern positioning accuracy are generally enhanced when the VT LR increases. For example, when compared with the O-KF-VT, the improved percentage of the RTK and DGPS with the 5-Hz VT LR is 0.83% and −0.10%, while the one with the 10-Hz VT LR is 5.59% and 4.32%, respectively.
5. Conclusions
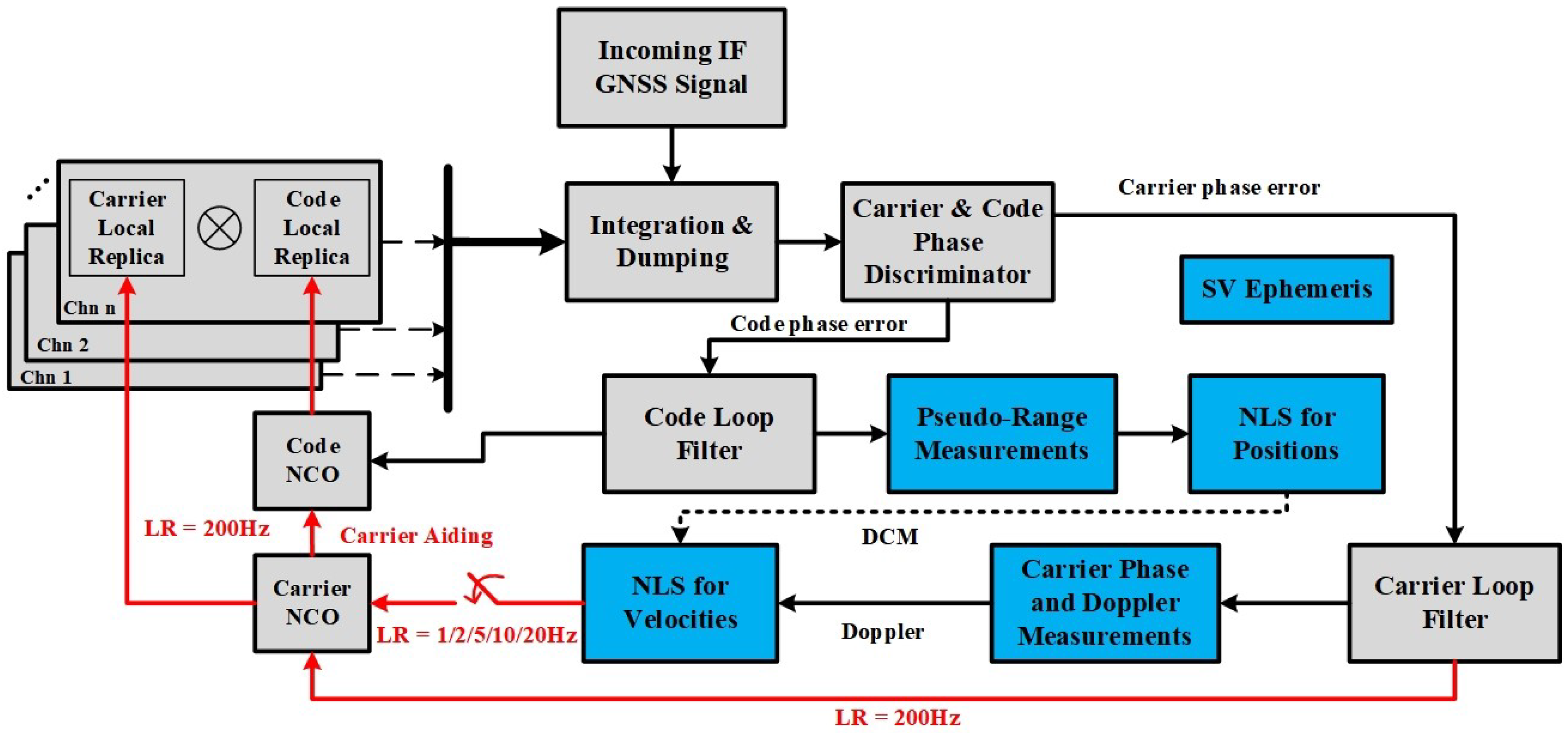
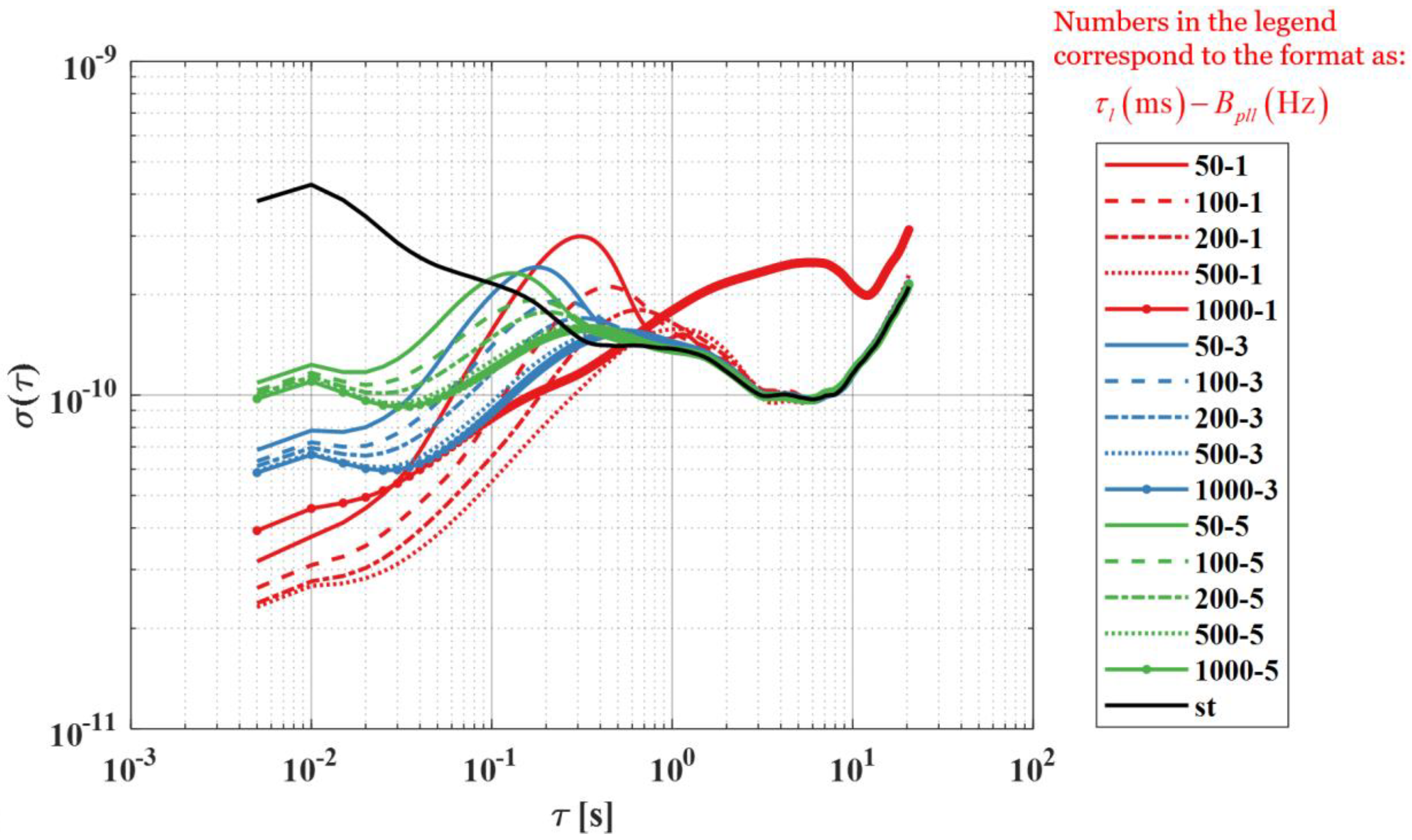
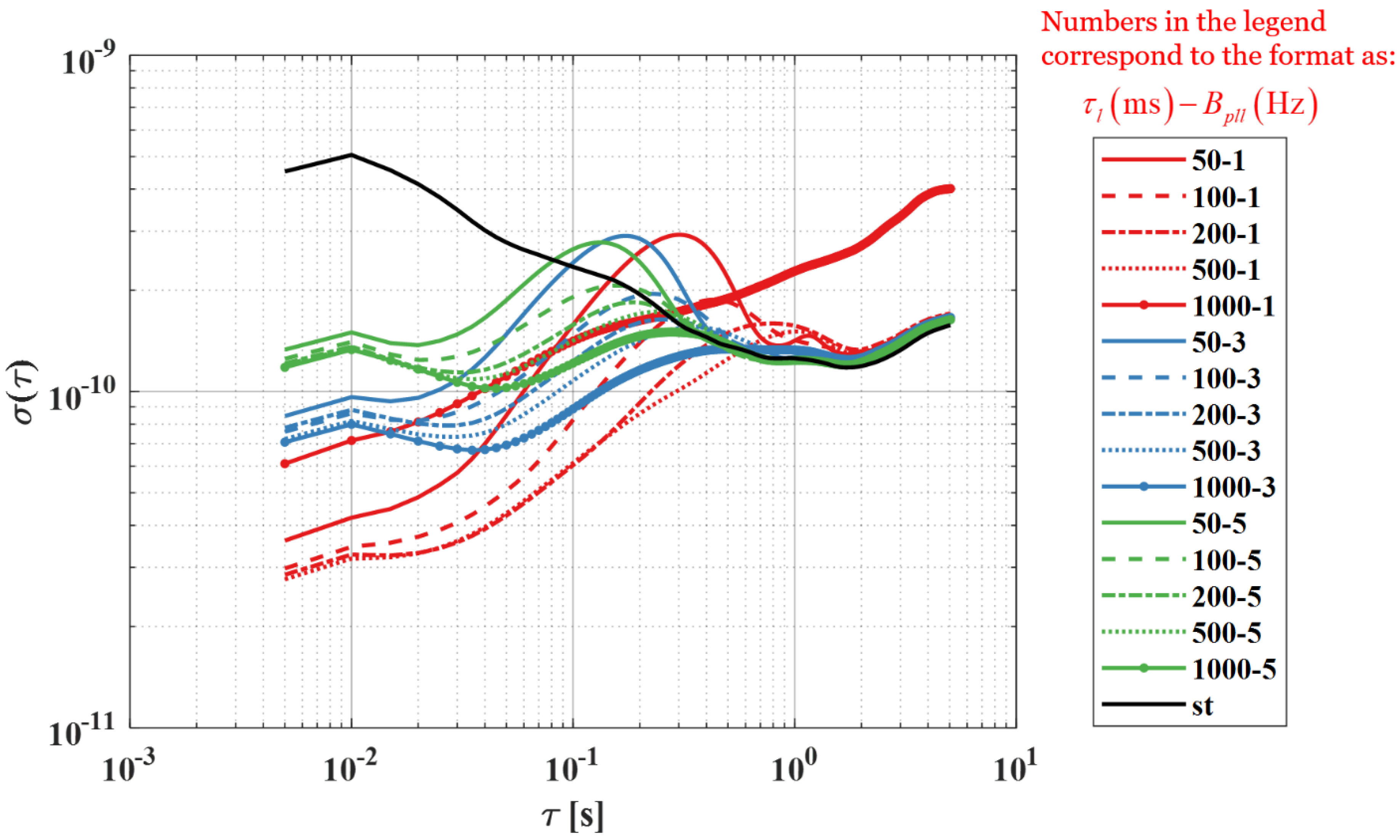
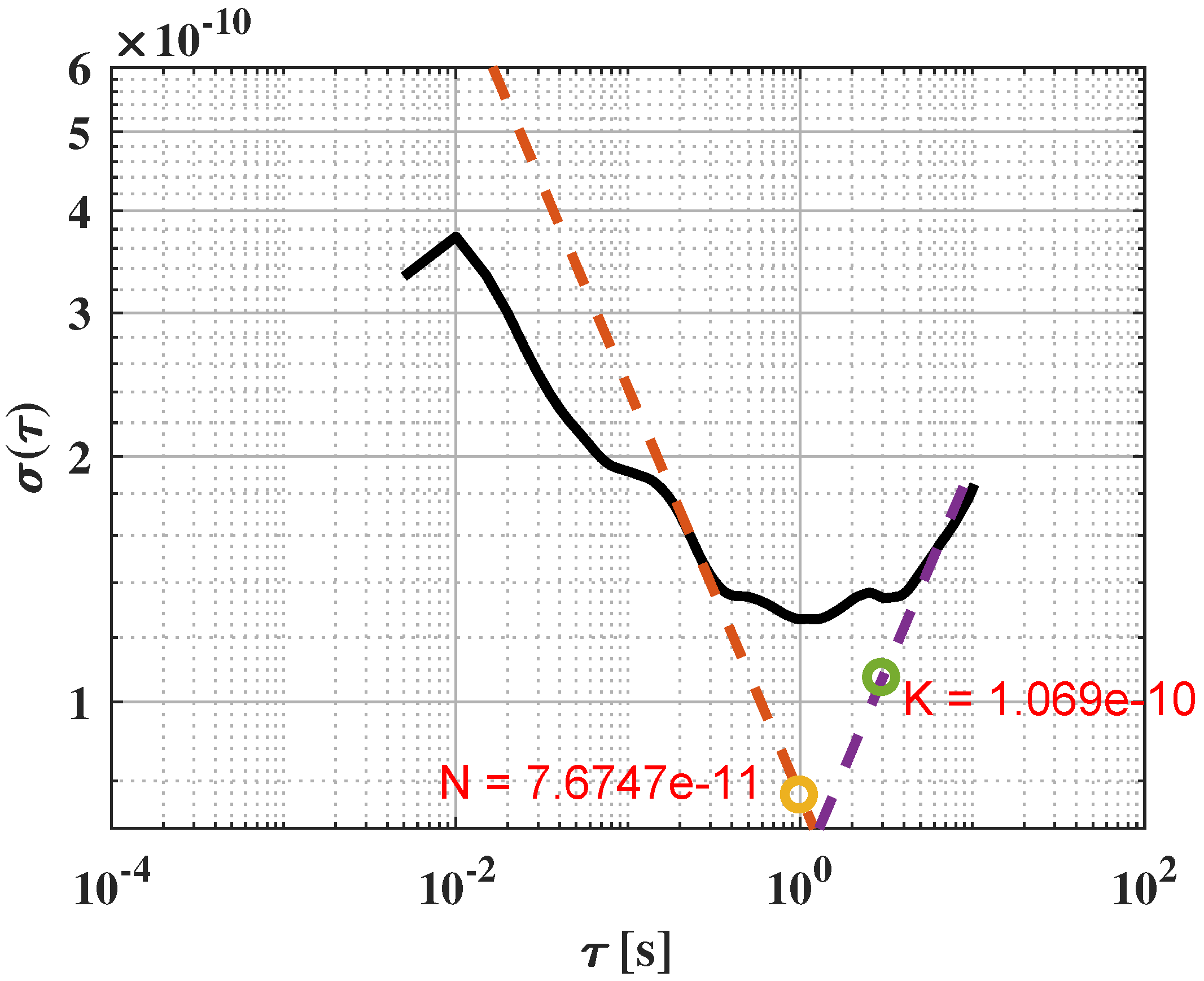
In this paper we provide an introduction about how to use the Allan variance algorithm to model the time-correlated error present in the local clock estimation data due to the VT feedback process. We applied the preliminary stationary field tests in two open-sky situations, and the estimated clock drift residual curves in terms of the Allan deviation are plot based on these static statistic data. A distinctive segment has been discovered in the curve shape related to the VT loop which can be differentiated from the one produced by the ST loop. The separate segment marks that the Markov noise is present in the clock drift estimated from the GNSS SDR using the VT technique instead of the ST architecture. In this work, the 1st-order Gauss-Markov process is adopted to model such noise source. Then, an improved A-VTTCES-KF algorithm is proposed to suppress the biased error in the PVT solutions caused by such VT-induced time-correlated error in the tracking loop. The state vector and the process covariance matrix can be improved with the given time-correlated model. Once the time-correlated error is estimated through the A-VTTCES-KF, the performance of the clock drift estimations can be enhanced by removing the known error source. In other words, the carrier NCO updates, i.e., Equation (
24), can end up with obtaining a more accurate value, and the code NCO updates, which are aided by the carrier NCO, will accordingly be improved as well.
A Matlab-based GNSS SDR designed by the author is used to process the GPS L1 C/A signals in the field test to verify the proposed algorithms. The respective SDR using ordinary adaptive KF algorithm and the commercial low-cost U-Blox receiver are used for calculating the positioning solutions, relied on an open-source package program, RTKLIB, as the comparisons. The coherent integration time is chosen as 5 ms in this work, so the loop rate of the PLL and DLL updates is 200 Hz in the GNSS SDR. The experimental results have demonstrated that, when the LR of the VT architecture is set to 5 Hz, the GNSS SDR using the proposed A-VTTCES-KF can embrace the improvements of 14.17% and 21.40% in terms of the RTK positioning when compared with the VT SDR with the ordinary adaptive KF method and the U-Blox receiver, respectively. In addition, the DGPS positioning solutions produced by the proposed VT SDR also outperform the ones obtained from the SDR using the ordinary method method at a percentage of 9.73%. Towards the case of increasing the performance based on the code-based positioning algorithms, the receiver design methods, e.g., the discriminator applied for the code error estimation, the DLL bandwidth, could dramatically make a difference on the navigation solutions. Since the multipath interference has a higher influence on the pseudo-range measurement than the carrier phase measurement. Under this circumstance, it is acceptable that the DGPS positioning results estimated from the U-Blox receiver performed better than the proposed SDR architecture. It should also be noted that the proposed approach seems to work more efficiently in areas where the VT LR is lower. For example, the enhanced GNSS SDR was proved to provide higher improvements when the VT LR is chosen as 5Hz rather than the case of the VT LR being set to 10 Hz.
An approach using the Allan variance to account for the time-correlated error present in the typical VT loop has been proposed in this work, and the idea to compensate such error towards the VT-based receiver design has seldom been mentioned in previous researches. The time-correlated error would add extra biases to the GNSS measurements such that the code-based and carrier-phase-based positioning results can be intimately affected, and the related accuracies will be accordingly decreased. Under this circumstance, two major improvements have been made through the proposed A-VTTCES-KF. Firstly, the time-correlated error present in the measurements produced by the VT-based GNSS SDR can be reduced; secondly, the more accurate PVT results or state estimations in the prior epoch will be realized based on the first improvement, so that the innovation sequence used in the A-VTTCES-KF is able to adaptively enhance the performance of the priori process covariance matrix in the KF. It means that the positioning accuracy using the A-VTTCES-KF in the current epoch can be again increased. In a word, both bias in terms of the time-correlated error and the random noise error in terms of the KF process covariance matrix are promising to be suppressed by the proposed approach towards the VT loop architecture. These superiorities can overall improve the PVT performance produced by the VT-based GNSS receiver, as well as enhance its robustness ability in the challenging environments, e.g., weak, dynamic, or multipath-interfered cases. In our case, only the GM process is identified and quantified by the Allan deviation curve towards the time-correlated error modelling, but such error source may be accounted for using more than one models besides of the GM process in reality. An improved tool, GMWM, has recently been proposed to analyze the noise source distribution of the stochastic data [
67]. Our research for the time-correlated error modelling in the VT loop may be further fulfilled in a more precision way with the GMWM in the future work.

 ,
, 

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}