Reduction of Spatially Structured Errors in Wide-Swath Altimetric Satellite Data Using Data Assimilation

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Synthetic SWOT Data
2.1.1. Synthetic SWOT Data Creation
2.1.2. SWOT Data Errors
- Ka-Band Radar Interferometer (KaRIn) error
- residual roll error
- phase error
- baseline dilatation
- timing error
- wet-troposphere error
2.2. The Error Reduction Method
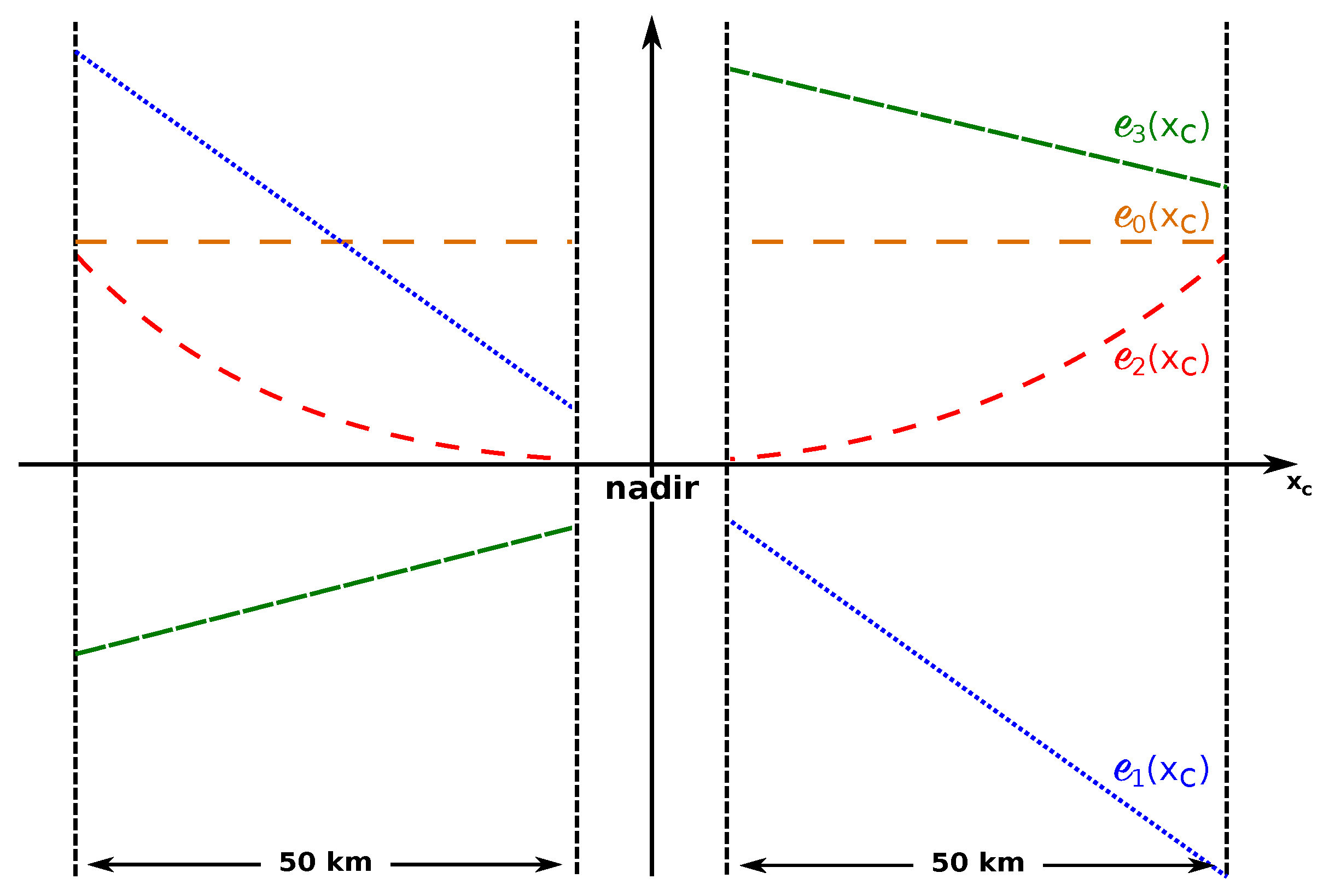
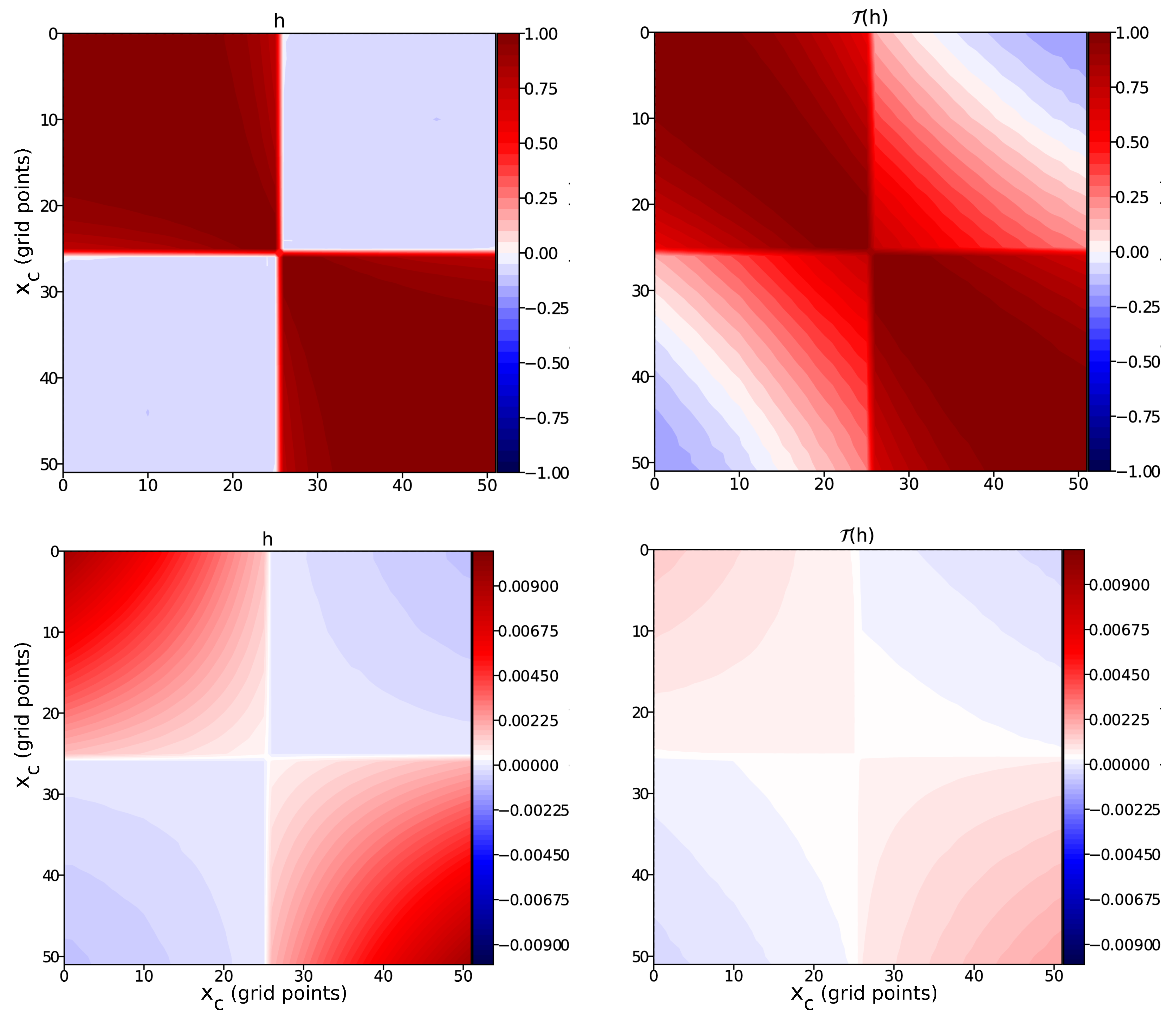
2.2.1. SWOT Data Detrending
2.2.2. Reducing Errors Using Data Assimilation
3. Results
3.1. The Experimental Setup
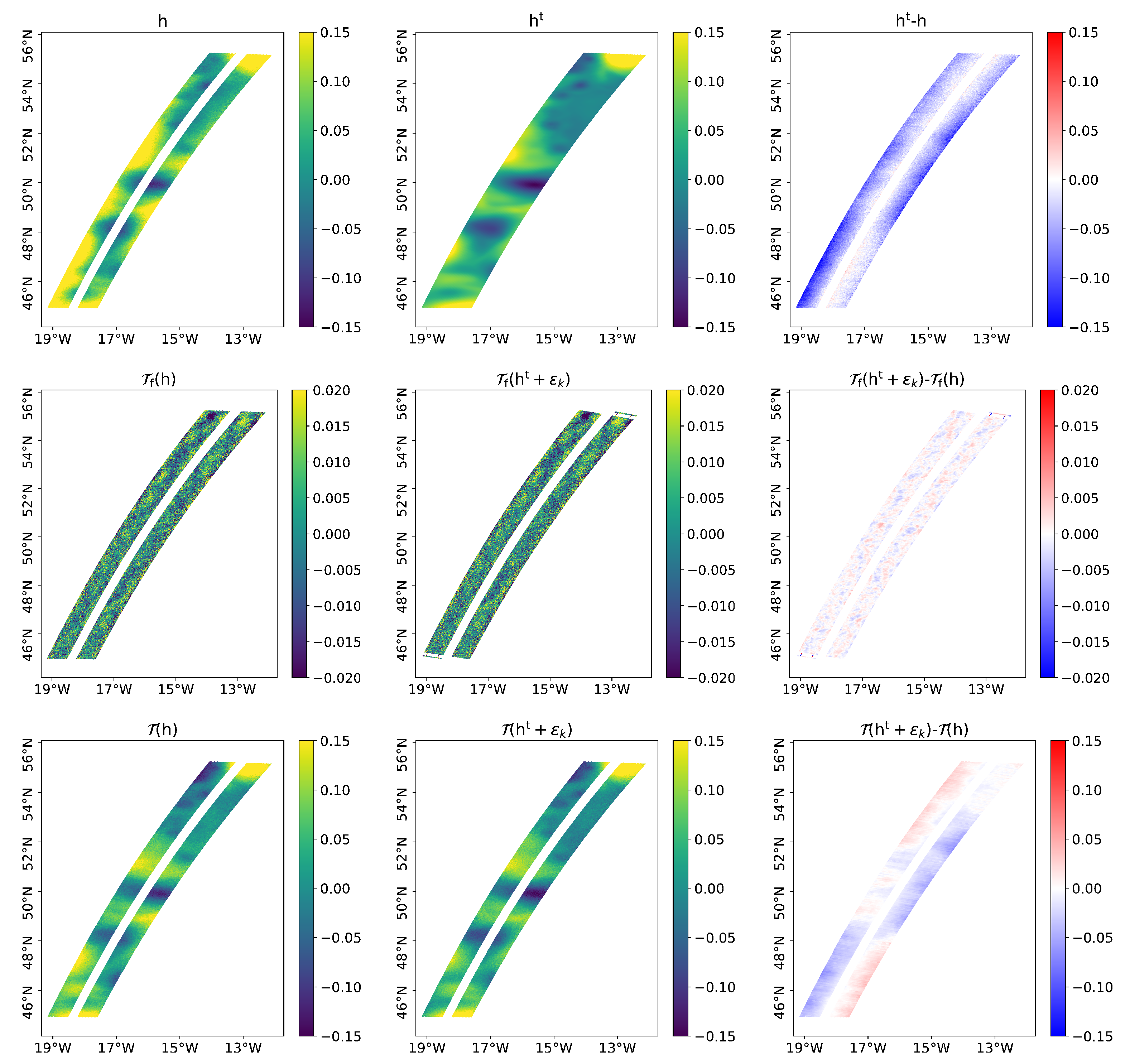
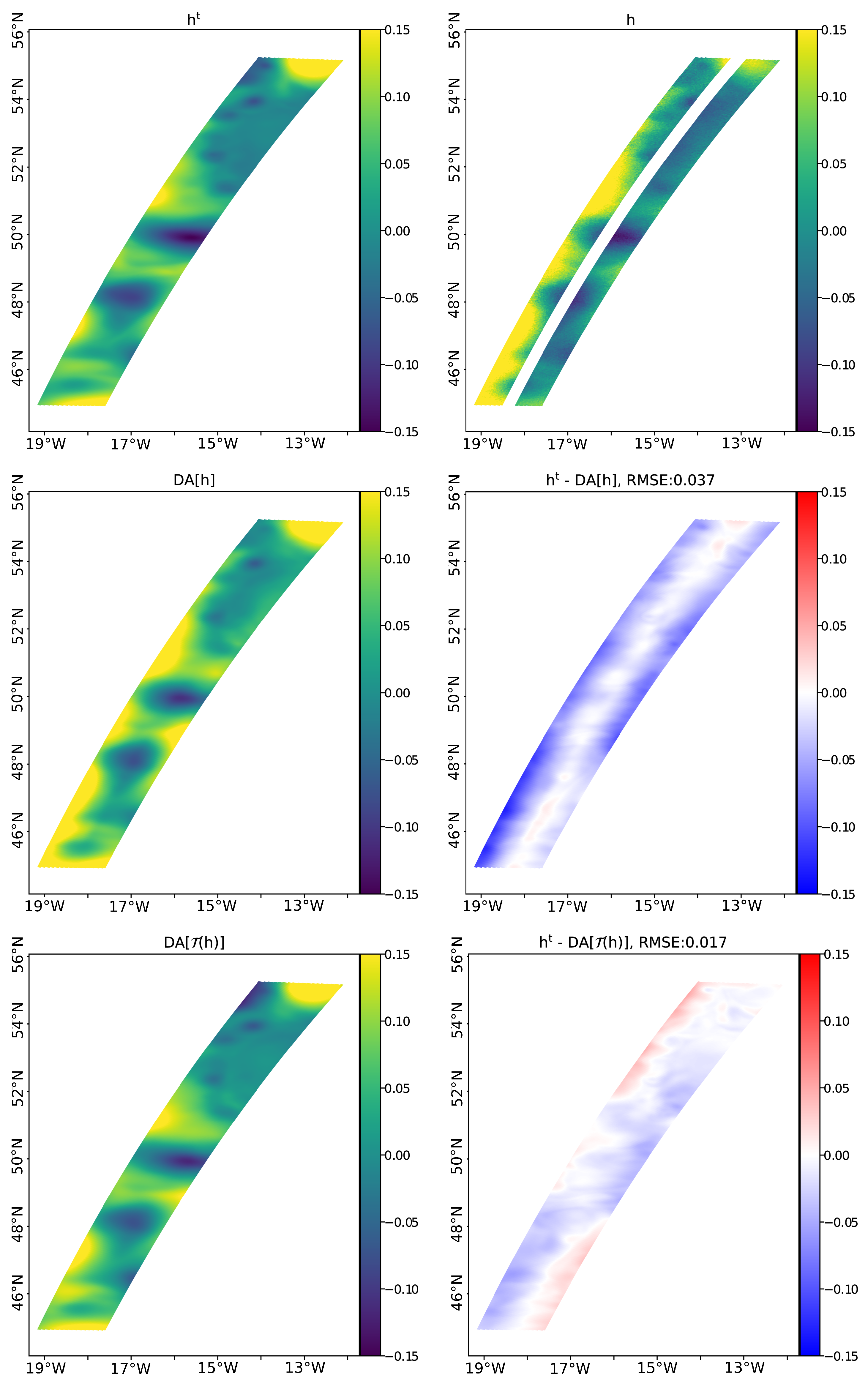
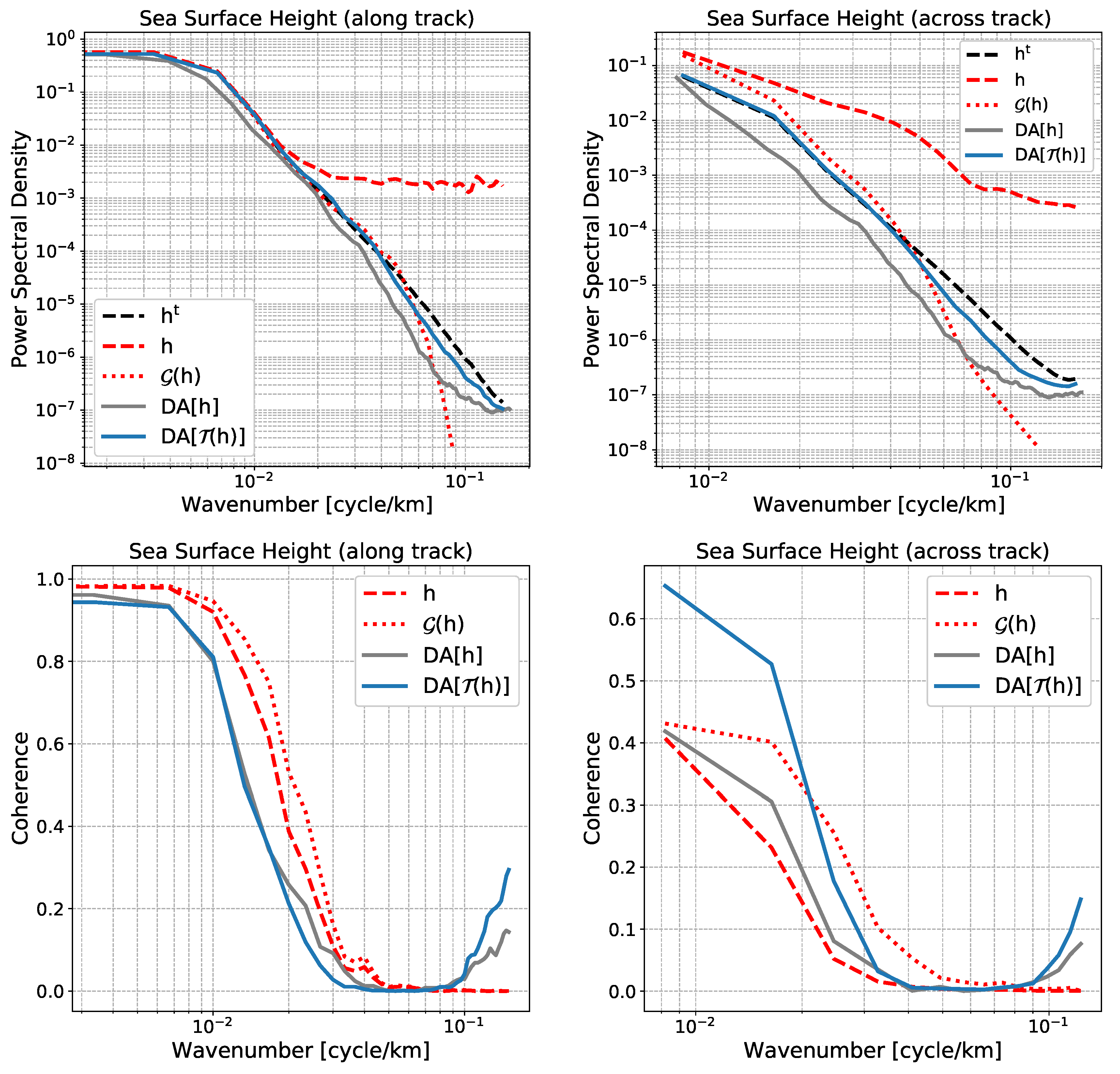
3.2. Error Reduction by Assimilating Detrended SWOT Data
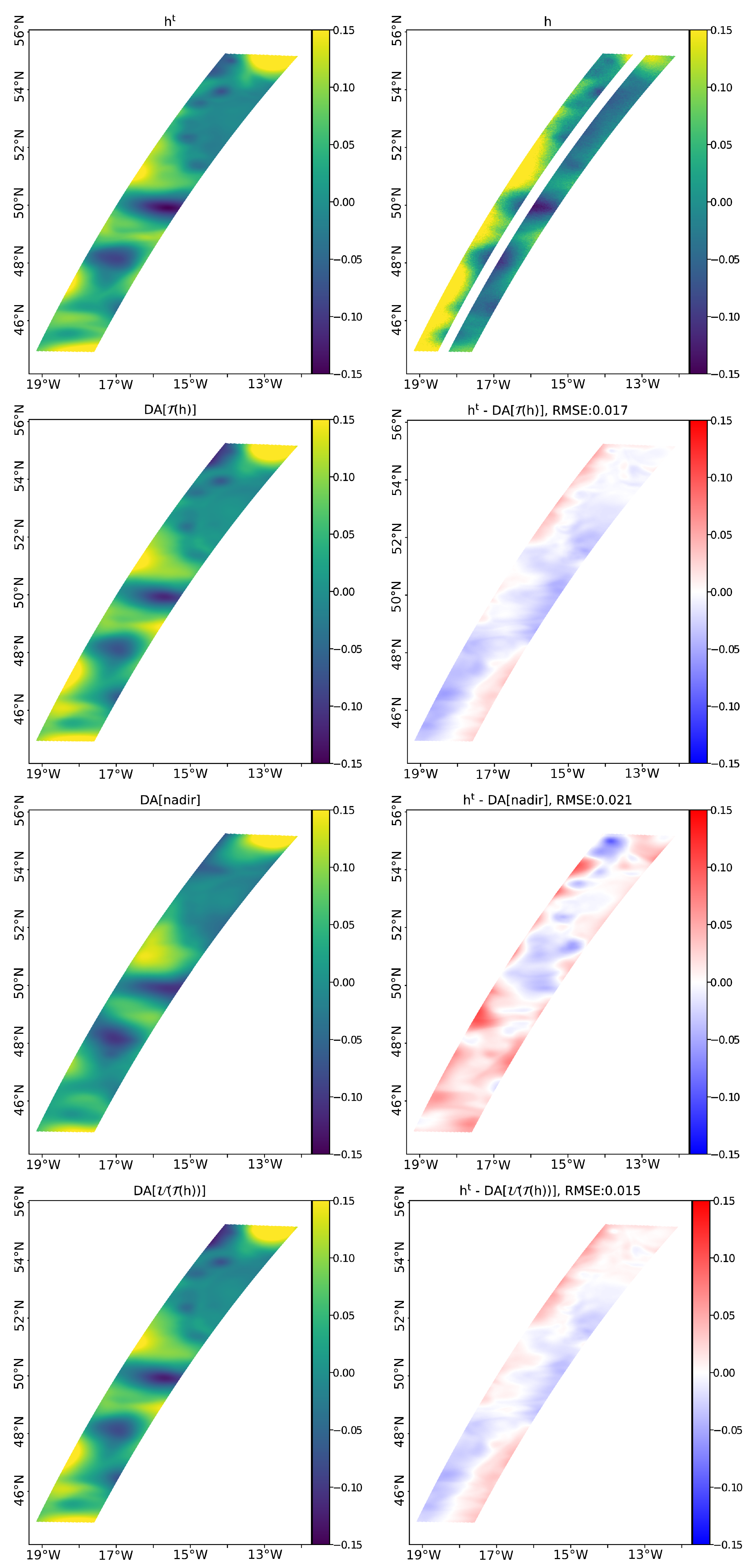
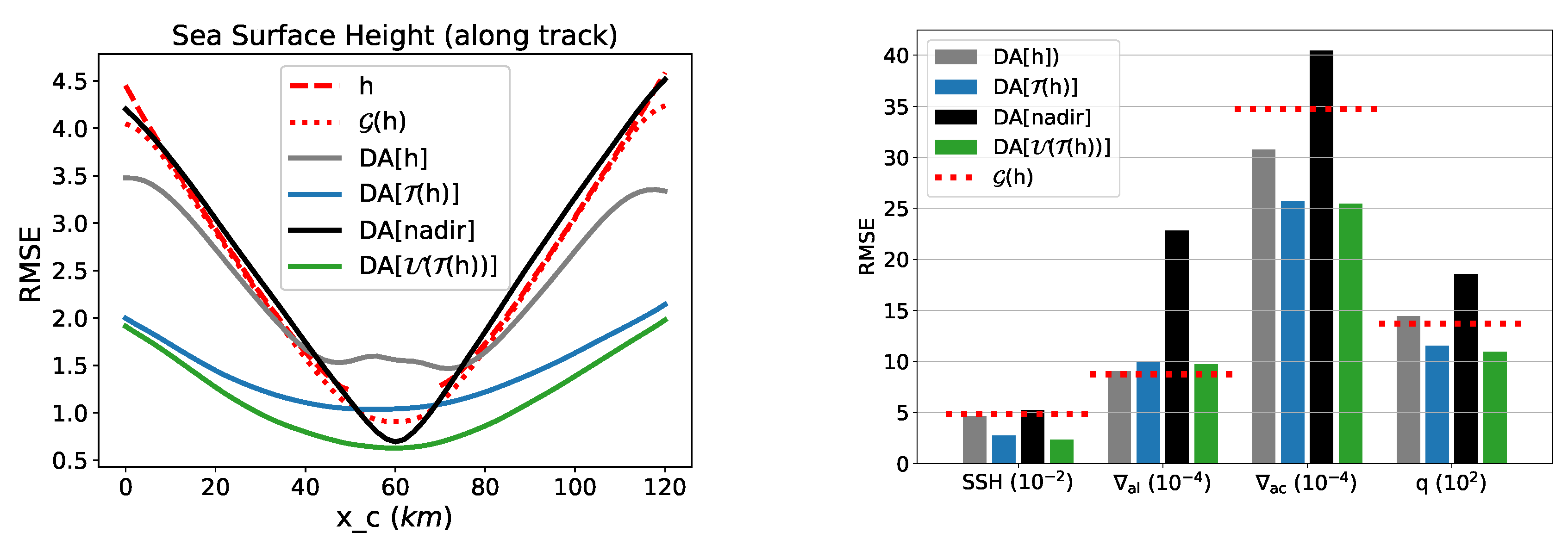
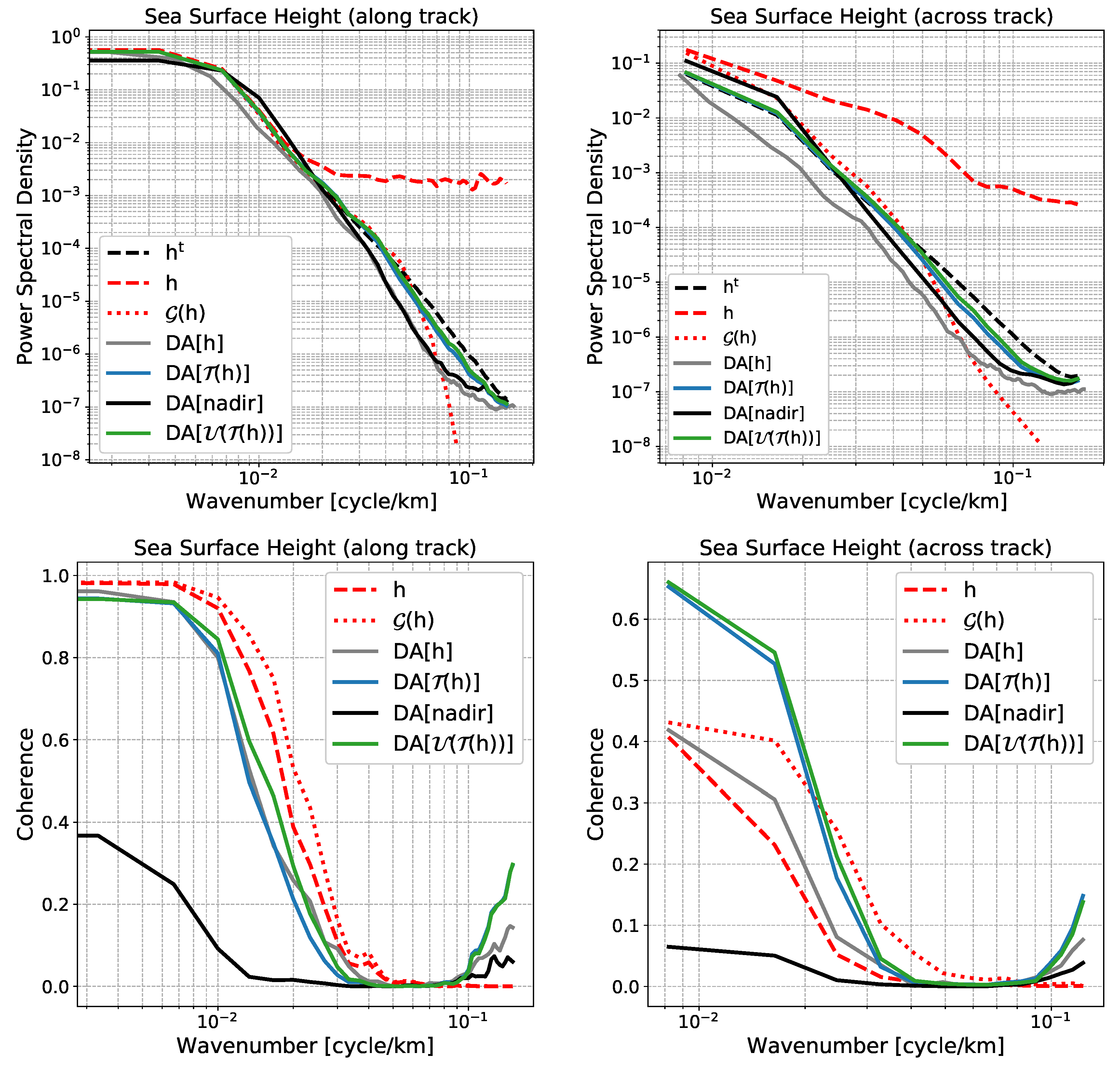
3.3. Combining Nadir and SWOT Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. SWOT Simulator Detailed Parameters
| #---Orbit file: |
| # Name of the orbit file |
| satname = "swot292" |
| filesat=dir_setup+ os.sep + ’orbit292.txt’ |
| # -----------------------# |
| # SWOT swath parameters |
| # -----------------------# |
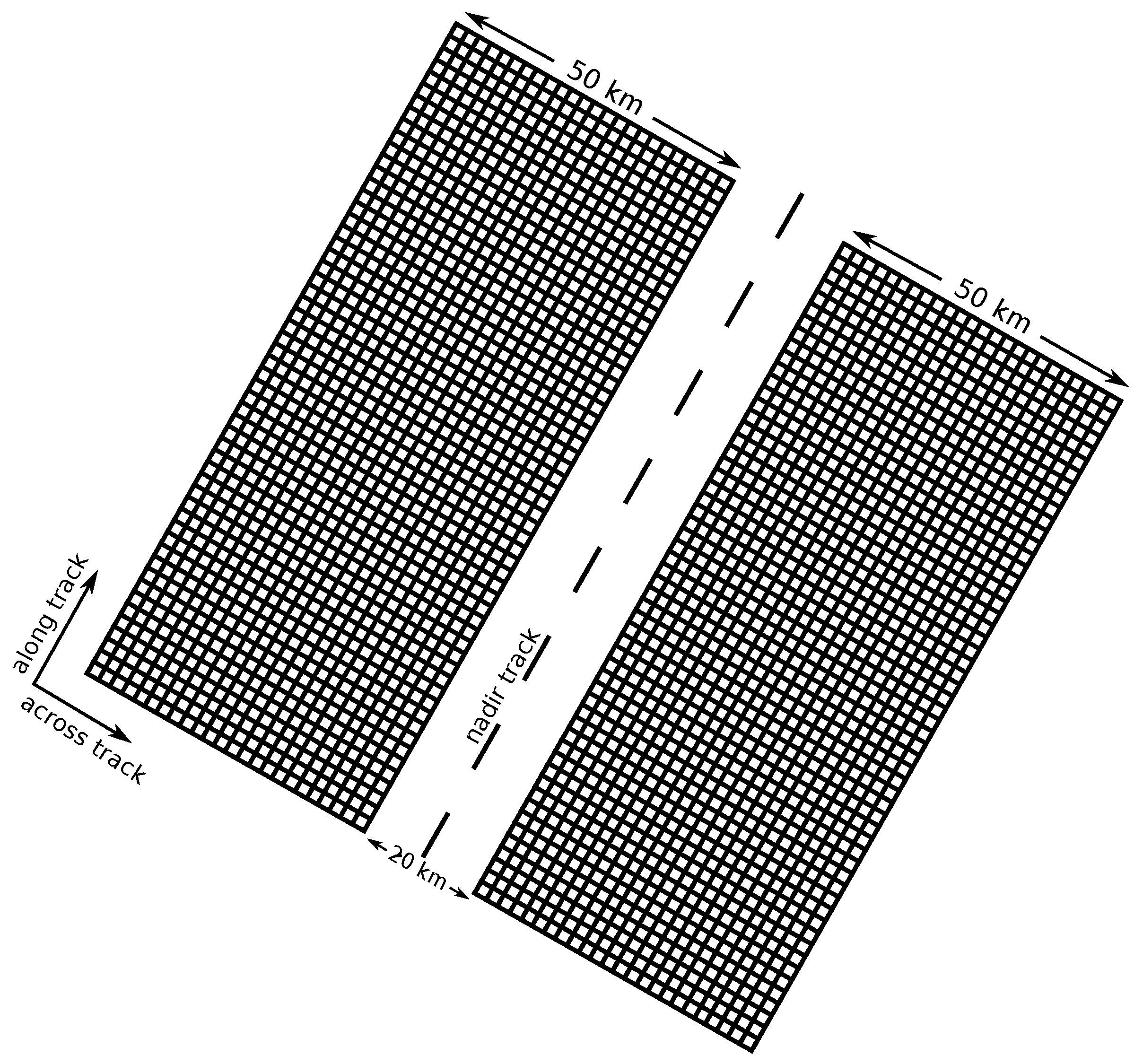
| #---Distance between nadir and the end of the swath (in km): |
| halfswath = 60. |
| #---Distance between nadir and the beginning of the swath (in km): |
| halfgap = 10. |
| #---Along track resolution (in km): |
| delta_al = 2. |
| #---Across track resolution (in km): |
| delta_ac = 2. |
| #---Shift longitude of the orbit file if no pass is in the domain |
| # (in degree): Default value is None (no shift) |
| shift_lon = None |
| #---Shift time of the satellite pass (in day): |
| # Default value is None (no shift) |
| shift_time = None |
| # -----------------------# |
| # Model input parameters |
| # -----------------------# |
| #---Type of grid: |
| grid = ’irregular’ |
| #---Time step between two model outputs (in days): |
| timestep = 1./24. |
| #---Number of outputs to consider: |
| # (timestep*nstep=total number of days) |
| nstep = 365.*24. |
| # -----------------------# |
| # SWOT output files |
| # -----------------------# |
| interpolation = ’linear’ |
| # -----------------------# |
| # SWOT error parameters |
| # -----------------------# |
| #---KaRIn noise (True to compute it): |
| KaRIn = True |
| #---SWH for the region: |
| swh = 2.0 |
| #---Number of km of random coefficients for KaRIn noise: |
| nrandKaRIn = 1000 |
| #---Other instrument error (roll, phase, baseline dilation, timing) |
| ## ----------------------------------------------------------------- |
| #---Compute nadir (True or False): |
| nadir = True |
| #---Number of random realisations for instrumental and geophysical |
| # error (recommended ncomp=2000), ncomp1d is used for 1D spectrum, |
| # and ncomp2d for 2D spectrum (wet troposphere computation): |
| ncomp1d = 2000 |
| ncomp2d = 2000 |
| #---Cut off frequency: |
| lambda_cut = 20000 |
| lambda_max = 20000 |
| #---Roll error (True to compute it): |
| roll = True |
| #---Phase error (True to compute it): |
| phase = True |
| #---Baseline dilation error (True to compute it): |
| baseline_dilation = True |
| #---Timing error (True to compute it): |
| timing = True |
| ##---Geophysical error |
| ## ---------------------- |
| #---Wet tropo error (True to compute it): |
| wet_tropo = True |
| #---Beam print size (in km): |
| # Gaussian footprint of sigma km |
| sigma = 8. |
| #---Number of beam used to correct wet_tropo signal (1, 2 or ’both’): |
| nbeam = 2 |
| #---Beam position if there are 2 beams (in km from nadir): |
| beam_pos_l = -35. |
| beam_pos_r = 35. |
Appendix B. Ensemble Kalman Filter Brief Description
Appendix C. Data Assimilation Setup Details
- The observation error covariance matrices, , were not specifically tuned. They are assumed diagonal and constant along the diagonal: = diag(). The respective values of are detailed in Table A1.Table A1. The values of defining the observation error covariance matrices = diag(), in meters, for the respective observations .Table A1. The values of defining the observation error covariance matrices = diag(), in meters, for the respective observations .
Y h nadir 0.08 0.03 0.01 0.02 - The localization used in the ensemble Kalman Filter is the domain localization described in Hunt et al. [38]. The localization parameters, namely the localization cutoff and radius, are specified for each observation in Table A2.Table A2. The localization cutoff and radius , in km, for the respective observations .
Y h nadir 80 80 80 80 40 40 60 40

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Durand, M.; Fu, L.L.; Lettenmaier, D.; Alsdorf, D.; Rodriguez, E.; Esteban-Fernandez, D. The Surface Water and Ocean Topography Mission: Observing terrestrial surface water and oceanic submesoscale eddies. Proc. IEEE 2010, 98, 766–779. [Google Scholar] [CrossRef]
- Fu, L.L.; Ferrari, R. Observing oceanic submesoscale processes from space. Eos Trans. Am. Geophys. Union 2008, 89, 488. [Google Scholar] [CrossRef]
- Fu, L.L.; Alsdorf, D.; Rodriguez, E.; Morrow, R.; Mognard, N.; Lambin, J.; Vaze, P.; Lafon, T. The SWOT (Surface Water and Ocean Topography) Mission: Spaceborne radar interferometry for oceanographic and hydrological applications. In Proceedings of the OCEANOBS’09 Conference, Venice, Italy, 21–25 September 2009. [Google Scholar]
- McWilliams, J.C. The nature and consequences of oceanic eddies. Ocean Model. Eddy. Regime 2008, 177, 5–15. [Google Scholar]
- McWilliams, J.C. Submesoscale currents in the ocean. Proc. R. Soc. A Math. Phys. Eng. Sci. 2016, 472, 20160117. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M.; Farrar, J.T.; Molemaker, M.J.; McWilliams, J.C.; Gula, J. Prospects for future satellite estimation of small-scale variability of ocean surface velocity and vorticity. Prog. Oceanogr. 2019, 173, 256–350. [Google Scholar] [CrossRef]
- Gómez-Navarro, L.; Fablet, R.; Mason, E.; Pascual, A.; Mourre, B.; Cosme, E.; Le Sommer, J. SWOT Spatial Scales in the Western Mediterranean Sea Derived from Pseudo-Observations and an Ad Hoc Filtering. Remote Sens. 2018, 10, 599. [Google Scholar] [CrossRef]
- Ruggiero, G.A.; Cosme, E.J.M.; Le Sommer, J.C. An efficient way to account for observation error correlations in the assimilation of data from the future swot high-resolution altimeter mission. J. Atmos. Ocean. Technol. 2016, 33, 2755–2768. [Google Scholar] [CrossRef]
- Yaremchuk, M.; D’Addezio, J.M.; Panteleev, G.; Jacobs, G. On the approximation of the inverse error covariances of high-resolution satellite altimetry data. Q. J. R. Meteorol. Soc. 2018, 144, 1995–2000. [Google Scholar] [CrossRef]
- Dibarboure, G.; Ubelmann, C. Investigating the performance of four empirical cross-calibration methods for the proposed SWOT mission. Remote Sens. 2014, 6, 4831–4869. [Google Scholar] [CrossRef]
- Esteban-Fernandez, D. SWOT Project Mission Performance and Error Budget Document; JPL Doc. JPL D-79084; NASA: Washington, DC, USA, 2014. [Google Scholar]
- Fresnay, S.; Ponte, A.L.; Le Gentil, S.; Le Sommer, J. Reconstruction of the 3-D Dynamics From Surface Variables in a High-Resolution Simulation of North Atlantic. J. Geophys. Res. Oceans 2018, 123, 1612–1630. [Google Scholar] [CrossRef] [Green Version]
- Amores, A.; Jordá, G.; Arsouze, T.; Le Sommer, J. Up to what extent can we characterize ocean eddies using present-day gridded altimetric products? J. Geophys. Res. Oceans 2018, 123, 7220–7236. [Google Scholar] [CrossRef]
- Madec, G. NEMO ocean engine. In Note du Pôle de Modélisation; No 27; Institut Pierre-Simon Laplace (IPSL): Paris, France, 2015; ISSN 1288-1619. [Google Scholar]
- Qiu, B.; Chen, S.; Klein, P.; Wang, J.; Torres, H.; Fu, L.L.; Menemenlis, D. Seasonality in transition scale from balanced to unbalanced motions in the world ocean. J. Phys. Oceanogr. 2018, 48, 591–605. [Google Scholar] [CrossRef]
- Gula, J.; Blacic, T.M.; Todd, R.E. Submesoscale coherent vortices in the Gulf Stream. Geophys. Res. Lett. 2019, 46. [Google Scholar] [CrossRef]
- Buckingham, C.E.; Naveira Garabato, A.C.; Thompson, A.F.; Brannigan, L.; Lazar, A.; Marshall, D.P.; George Nurser, A.J.; Damerell, G.; Heywood, K.J.; Belcher, S.E.; et al. Seasonality of submesoscale flows in the ocean surface boundary layer. Geophys. Res. Lett. 2016, 43, 2118–2126. [Google Scholar] [CrossRef] [Green Version]
- Gaultier, L.; Ubelmann, C.; Fu, L.L. SWOT Simulator Documentation; Tech. Rep. 1.0.0; Jet Propulsion Laboratory, California Institute of Technology: Pasadena, CA, USA, 2015. [Google Scholar]
- NATL60 Configuration on GitHub. Available online: https://zenodo.org/record/1210116#.XPDnb3GYOUk (accessed on 12 April 2019).
- SWOT Simulator on GitHub. Available online: https://github.com/SWOTsimulator (accessed on 12 April 2019).
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R.W. The Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E), NASDA’s contribution to the EOS for global energy and water cycle studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Ménard, Y.; Fu, L.L.; Escudier, P.; Parisot, F.; Perbos, J.; Vincent, P.; Desai, S.; Haines, B.; Kunstmann, G. The Jason-1 mission special issue: Jason-1 calibration/validation. Mar. Geod. 2003, 26, 131–146. [Google Scholar] [CrossRef]
- Lambin, J.; Morrow, R.; Fu, L.L.; Willis, J.K.; Bonekamp, H.; Lillibridge, J.; Zaouche, G.; Vaze, P.; Bannoura, W.; Parisot, F. The OSTM/Jason-2 mission. Mar. Geod. 2010, 33, 4–25. [Google Scholar] [CrossRef]
- Daley, R. Atmospheric Data Analysis; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Ghil, M.; Malanotte-Rizzoli, P. Data assimilation in meteorology and oceanography. Adv. Geophys. 1991, 33, 141–266. [Google Scholar]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Asch, M.; Bocquet, M.; Nodet, M. Data Assimilation: Methods, Algorithms, and Applications; Fundamentals of Algorithms, SIAM: Philadelphia, PL, USA, 2016. [Google Scholar]
- Carrassi, A.; Bocquet, M.; Bertino, L.; Evensen, G. Data assimilation in the geosciences: An overview of methods, issues, and perspectives. WIREs Clim. Chang. 2018, 9, e535. [Google Scholar] [CrossRef]
- Bennett, A.F. Inverse Methods in Physical Oceanography; Cambridge University Press: Cambridge, UK; New York, NY, USA, 1992. [Google Scholar]
- Pham, D.T.; Verron, J.; Roubaud, M.C. A singular evolutive extended Kalman filter for data assimilation in oceanography. J. Mar. Syst. 1998, 16, 323–340. [Google Scholar] [CrossRef]
- Bertino, L.; Evensen, G.; Wackernagel, H. Sequential data assimilation techniques in oceanography. Int. Stat. Rev. 2003, 71, 223–241. [Google Scholar] [CrossRef]
- Lermusiaux, P.F.J. Uncertainty estimation and prediction for interdisciplinary ocean dynamics. J. Comp. Phys. 2006, 217, 176–199. [Google Scholar] [CrossRef] [Green Version]
- Sakov, P.; Counillon, F.; Bertino, L.; Lisaeter, K.A.; Oke, P.R.; Korablev, A. Topaz4: An ocean-sea ice data assimilation system for the north atlantic and arctic. Ocean Sci. 2012, 8, 633–656. [Google Scholar] [CrossRef]
- Brankart, J.M.; Ubelmann, C.; Testut, C.E.; Cosme, E.; Brasseur, P.; Verron, J. Efficient parameterization of the observation error covariance matrix for square root or ensemble Kalman filters: application to ocean altimetry. Mon.Weather Rev. 2009, 137, 1908–1927. [Google Scholar] [CrossRef]
- Fu, L.L.; Rodriguez, E.; Alsdorf, D.; Morrow, R. The SWOT Mission Science Document; JPL Publication: California, CA, USA, 2012. [Google Scholar]
- Evensen, G. Data Assimilation: The Ensemble Kalman Filter, 2nd ed.; Springer: Berlin/Heildelberg, Germany, 2009. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Hunt, B.; Kostelicj, E.J.; Szunyogh, I. Efficient data assimilation for spatiotemporal chaos: A local ensemble transform Kalman filter. Physica D 2007, 230, 112–126. [Google Scholar] [CrossRef] [Green Version]
Sample Availability: Samples of the compounds … are available from the authors. |











| Science Orbit | |
|---|---|
| Repeat Cycle (days) | |
| Repeat Cycle (Orbits) | 292 |
| Sub-cycles (days) | |
| Inclination | |
| Elevation (km) | 891 |
| Notations and Markers | ||
|---|---|---|
| Truth | Dashed black line | |
| SWOT observation | h | Dashed red line |
| Gaussian filtered SWOT | Dotted red line | |
| SWOT DA | Grey | |
| Detrended SWOT DA | Blue | |
| Nadir DA | Orange | |
| Nadir-adjusted detrended SWOT DA | Green | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Metref, S.; Cosme, E.; Le Sommer, J.; Poel, N.; Brankart, J.-M.; Verron, J.; Gómez Navarro, L. Reduction of Spatially Structured Errors in Wide-Swath Altimetric Satellite Data Using Data Assimilation. Remote Sens. 2019, 11, 1336. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111336
Metref S, Cosme E, Le Sommer J, Poel N, Brankart J-M, Verron J, Gómez Navarro L. Reduction of Spatially Structured Errors in Wide-Swath Altimetric Satellite Data Using Data Assimilation. Remote Sensing. 2019; 11(11):1336. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111336
Chicago/Turabian StyleMetref, Sammy, Emmanuel Cosme, Julien Le Sommer, Nora Poel, Jean-Michel Brankart, Jacques Verron, and Laura Gómez Navarro. 2019. "Reduction of Spatially Structured Errors in Wide-Swath Altimetric Satellite Data Using Data Assimilation" Remote Sensing 11, no. 11: 1336. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111336