Precise Onboard Real-Time Orbit Determination with a Low-Cost Single-Frequency GPS/BDS Receiver

 , ,
, ,
Abstract
:
1. Introduction
2. Algorithm
2.1. Dynamical Models
2.2. GNSS Measurements
2.3. Parameter Estimation
3. Experiments
3.1. Datasets and Orbit Determination Strategies
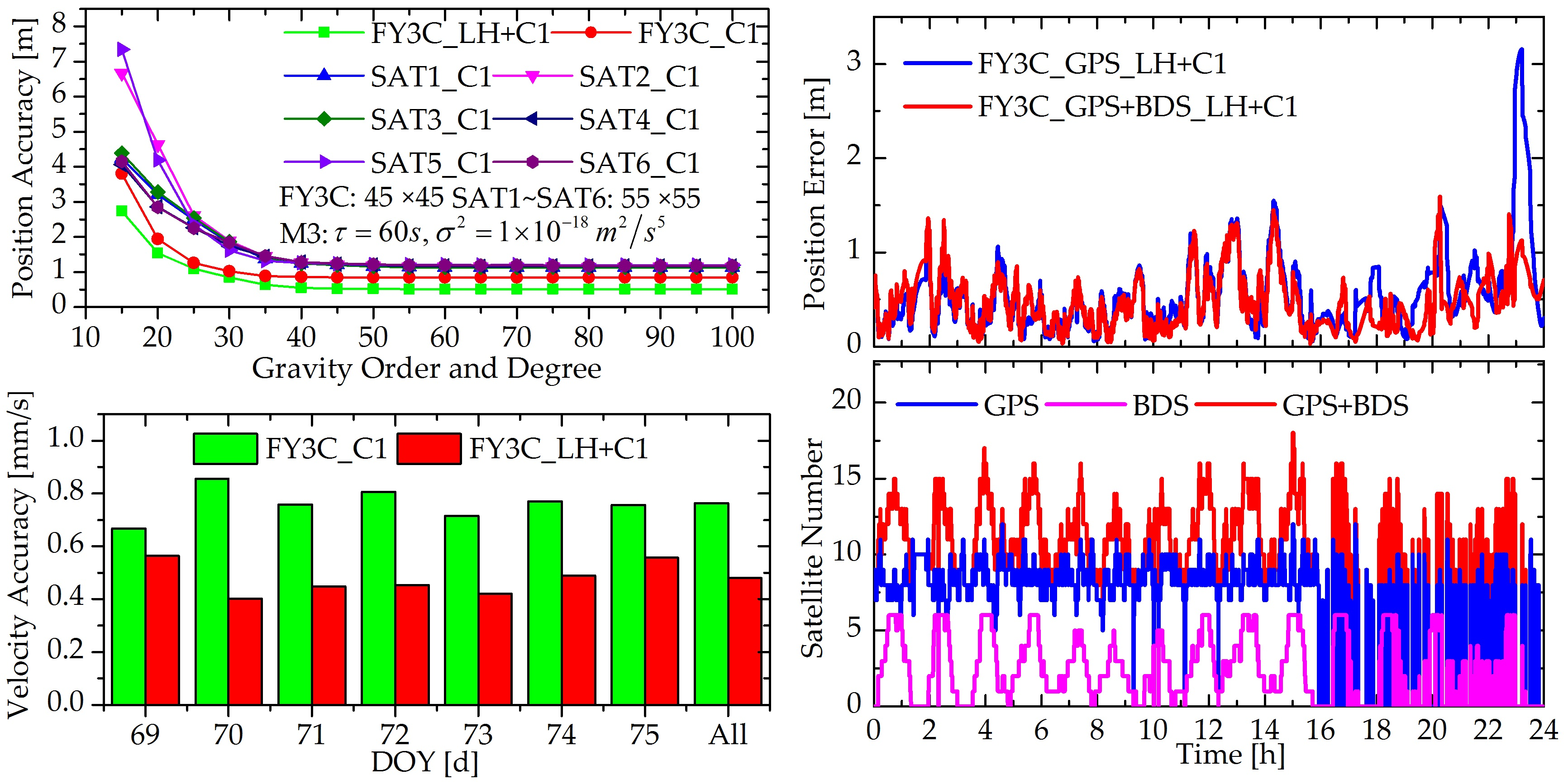
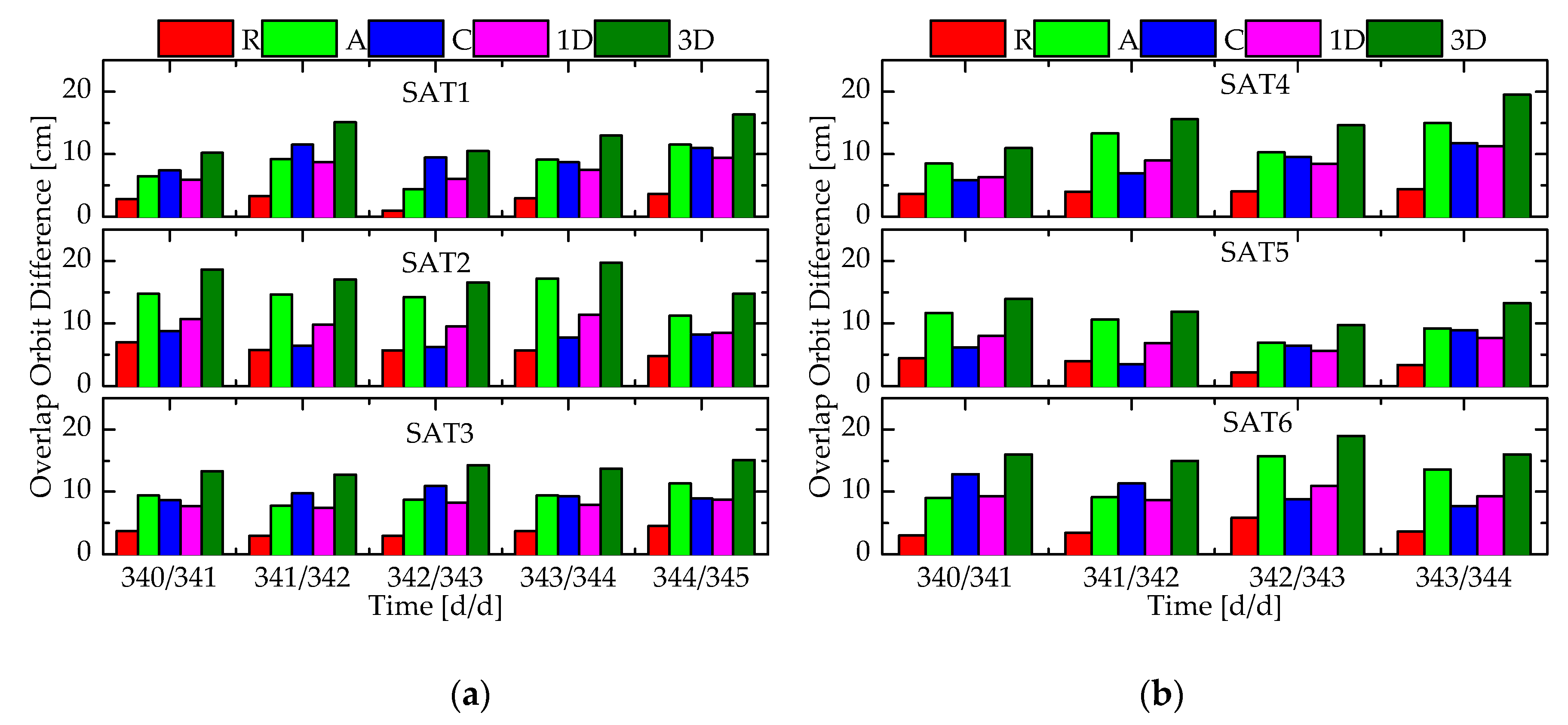
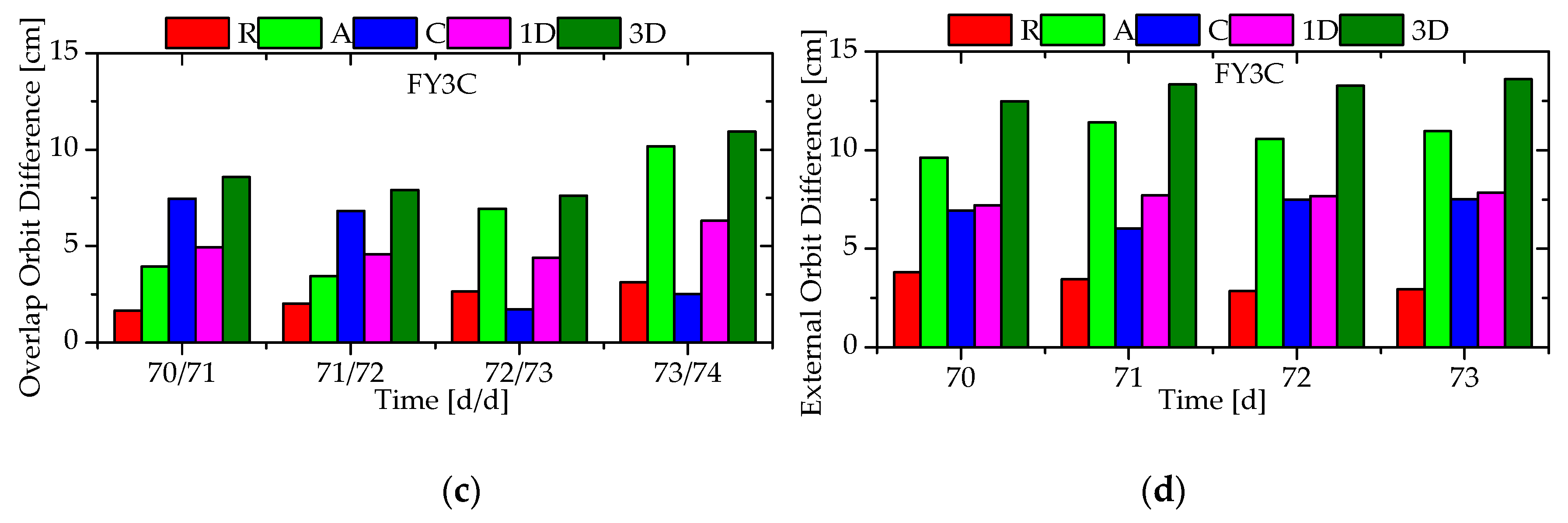
3.2. Reference Orbits
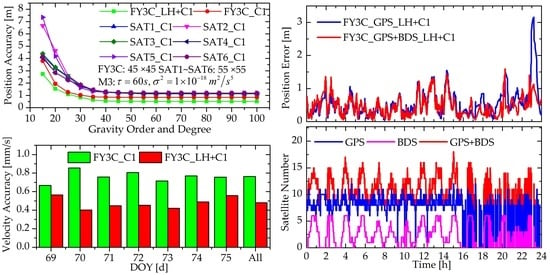
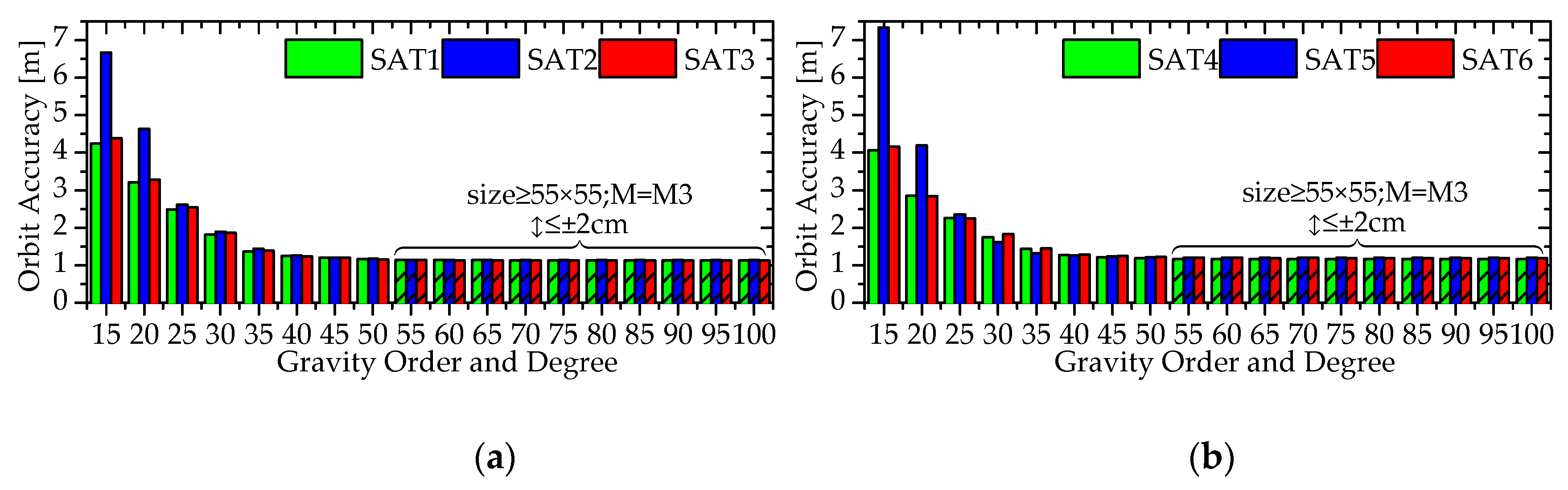
3.3. Force Model Trade-off
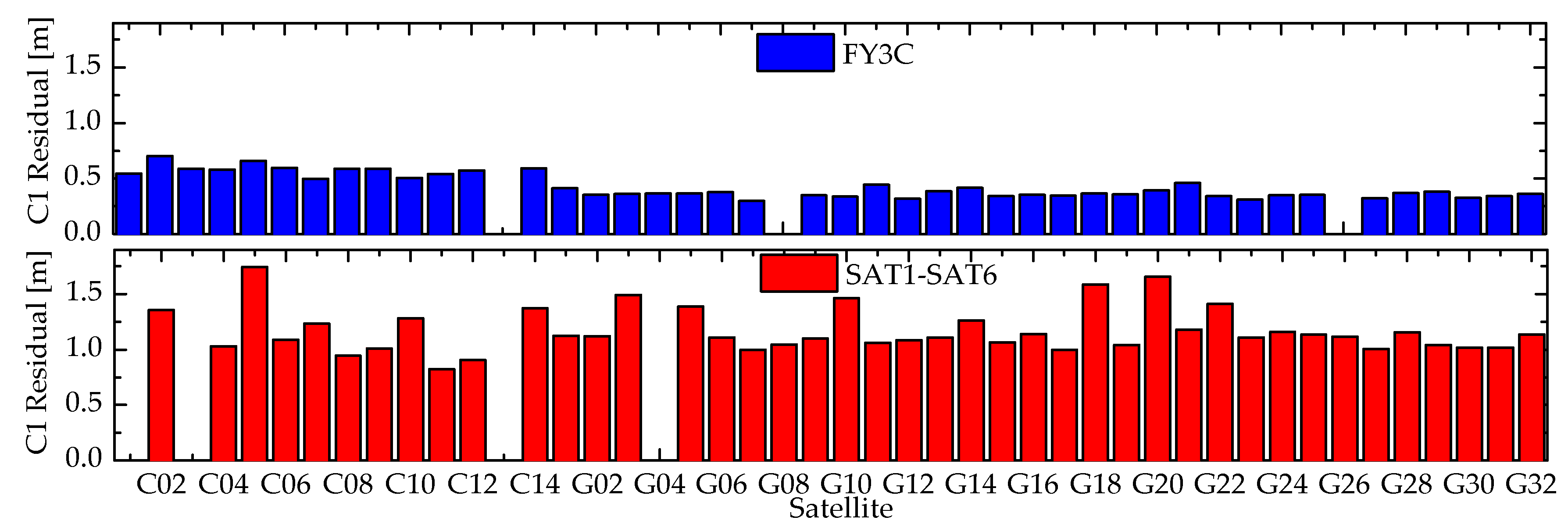
3.4. Effect of Measurements Type
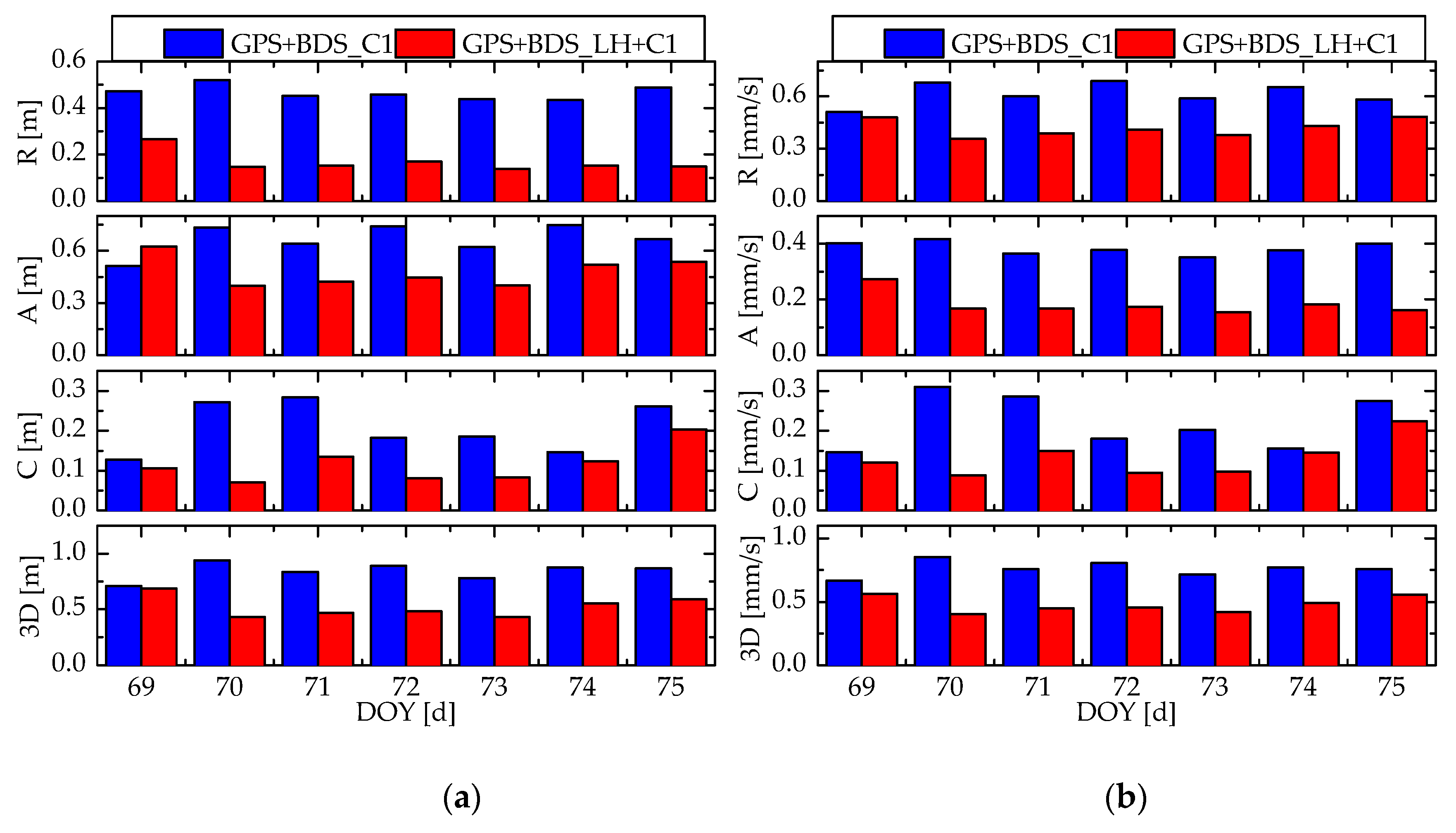
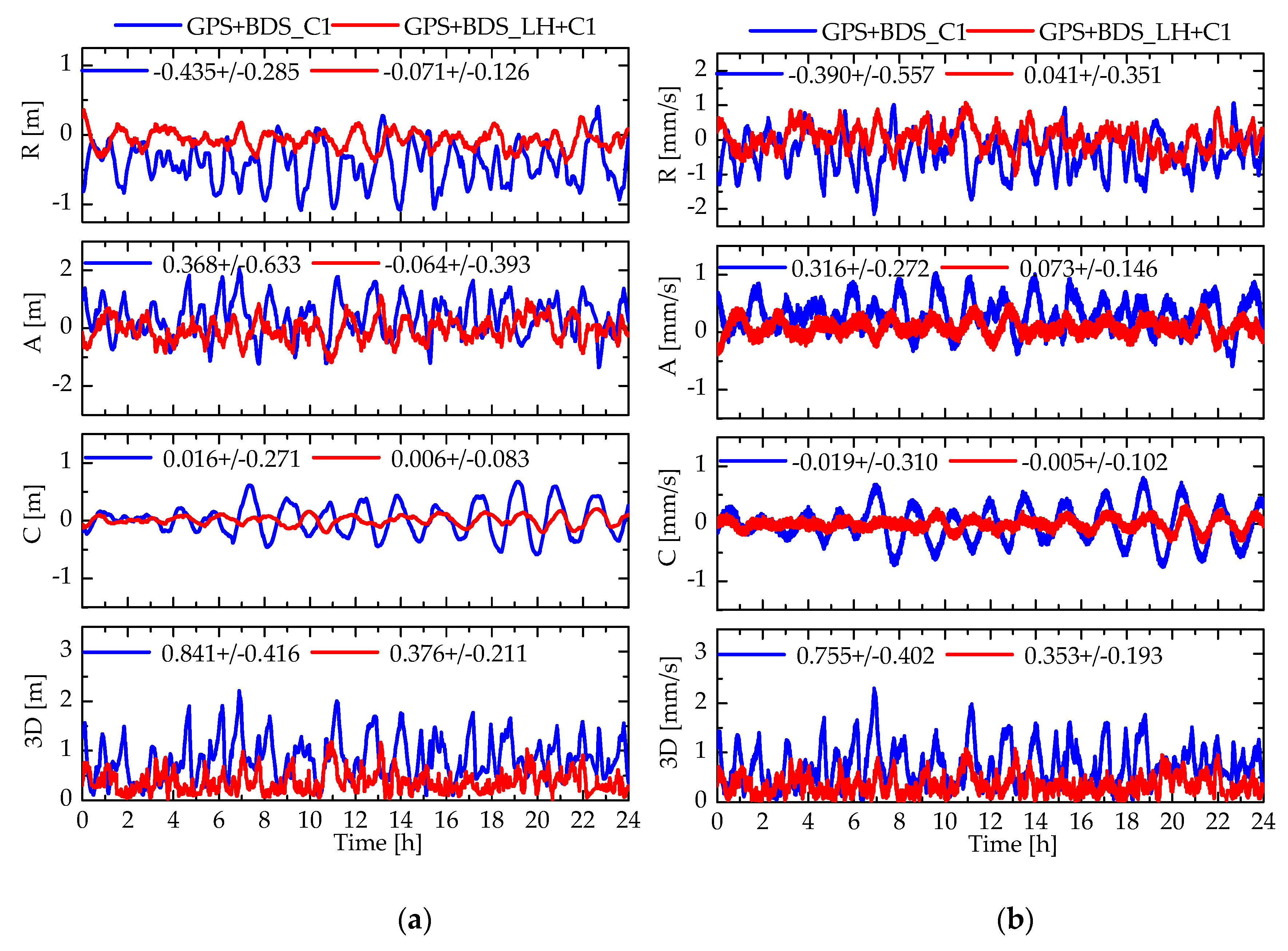
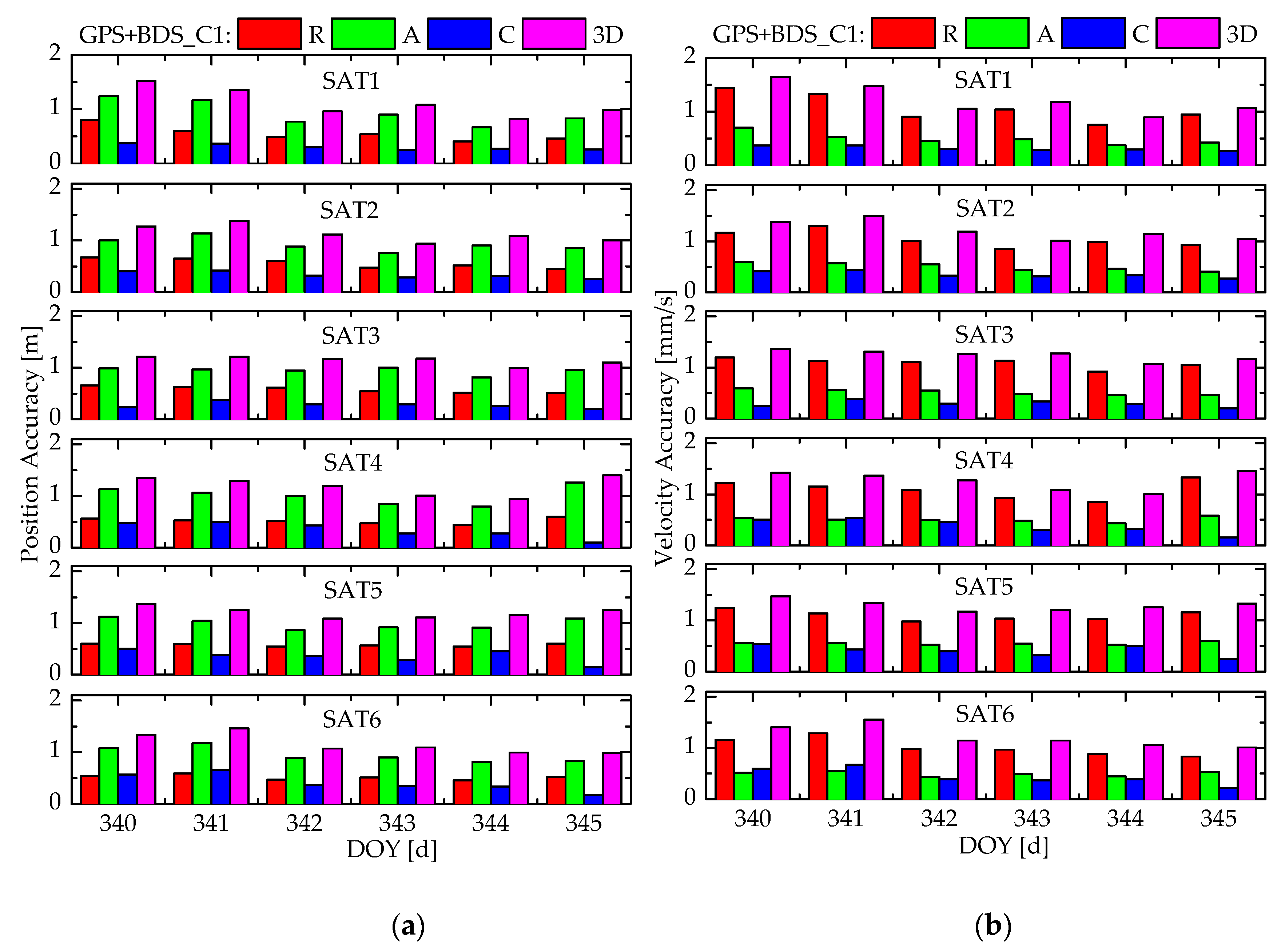
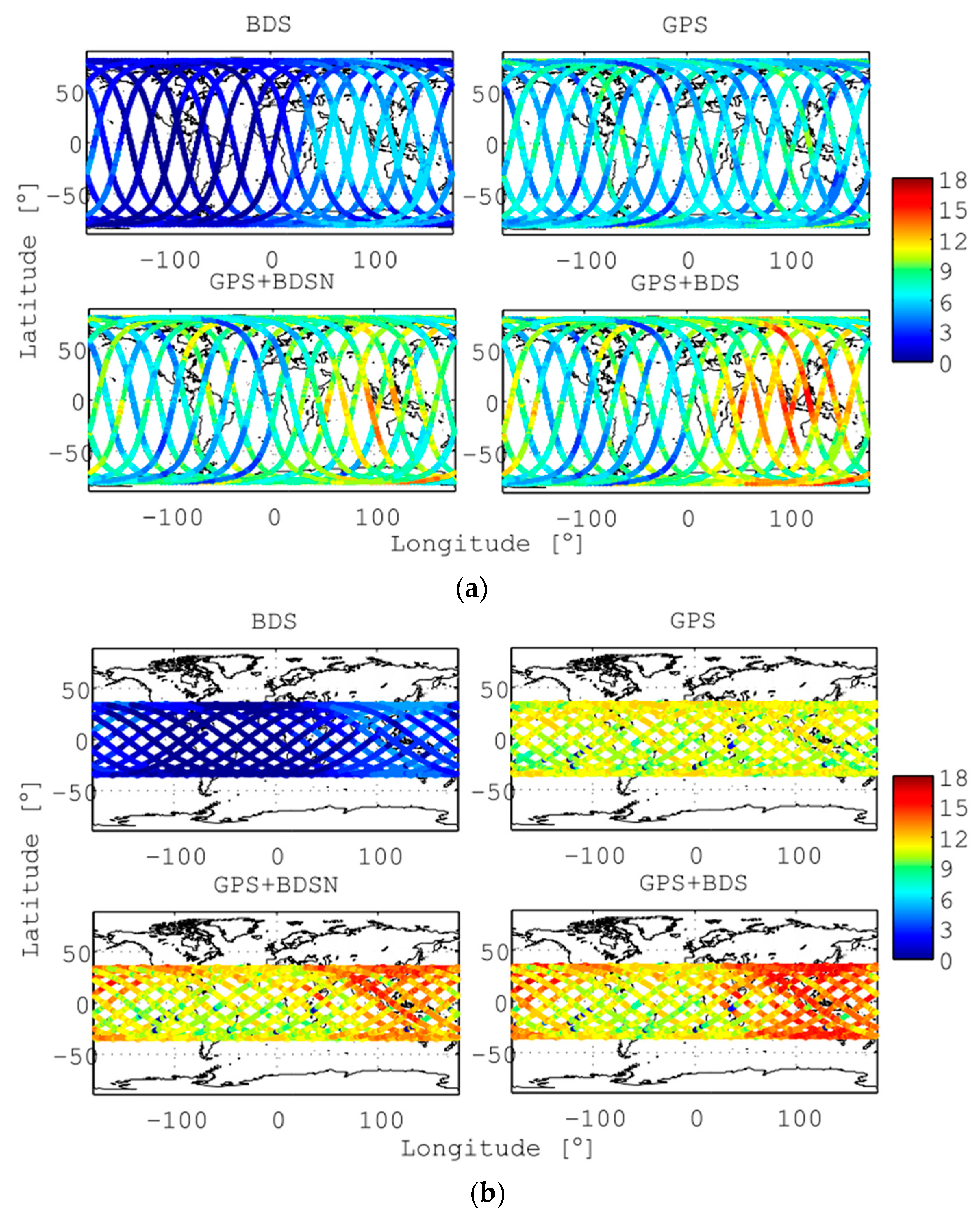
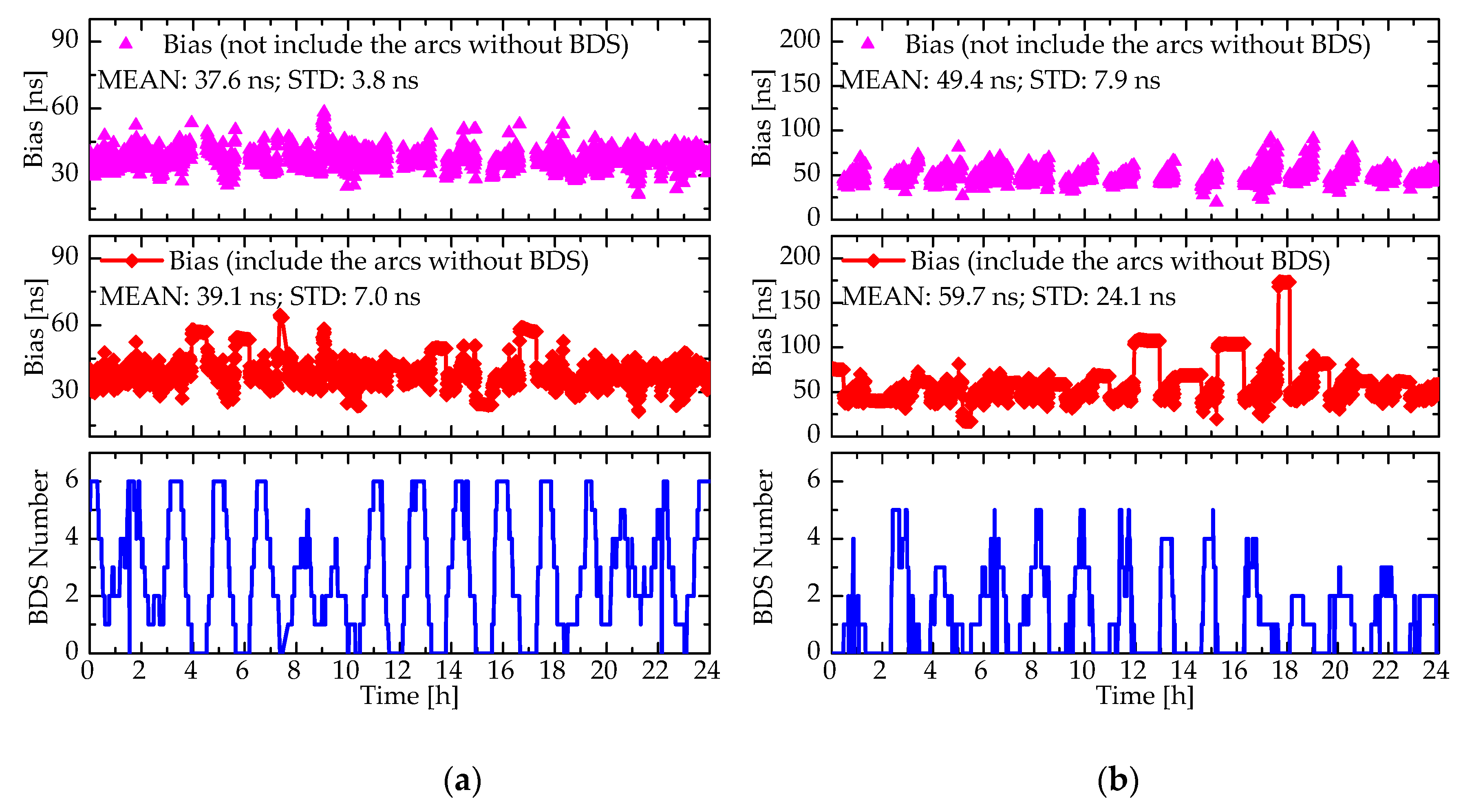
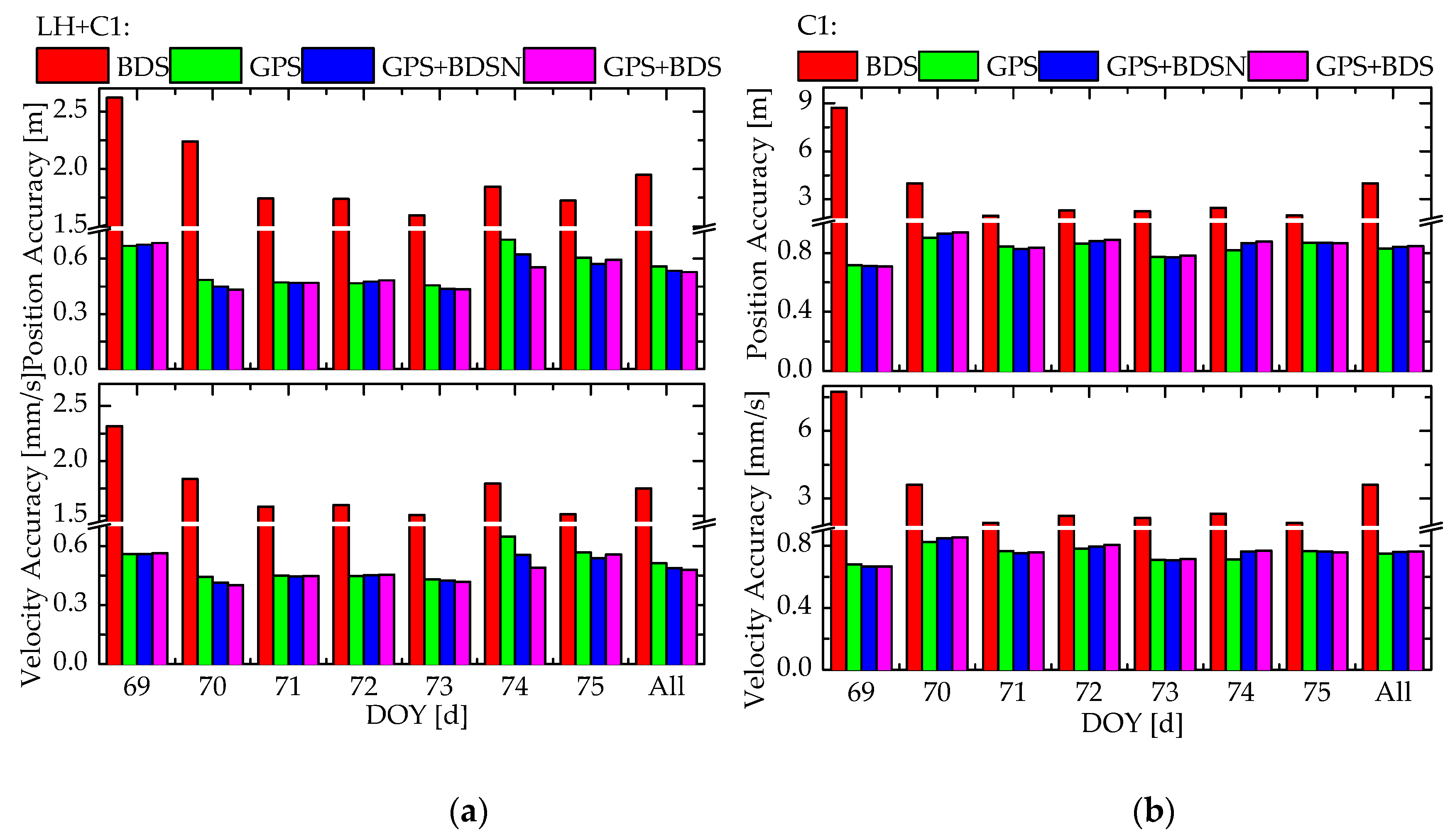
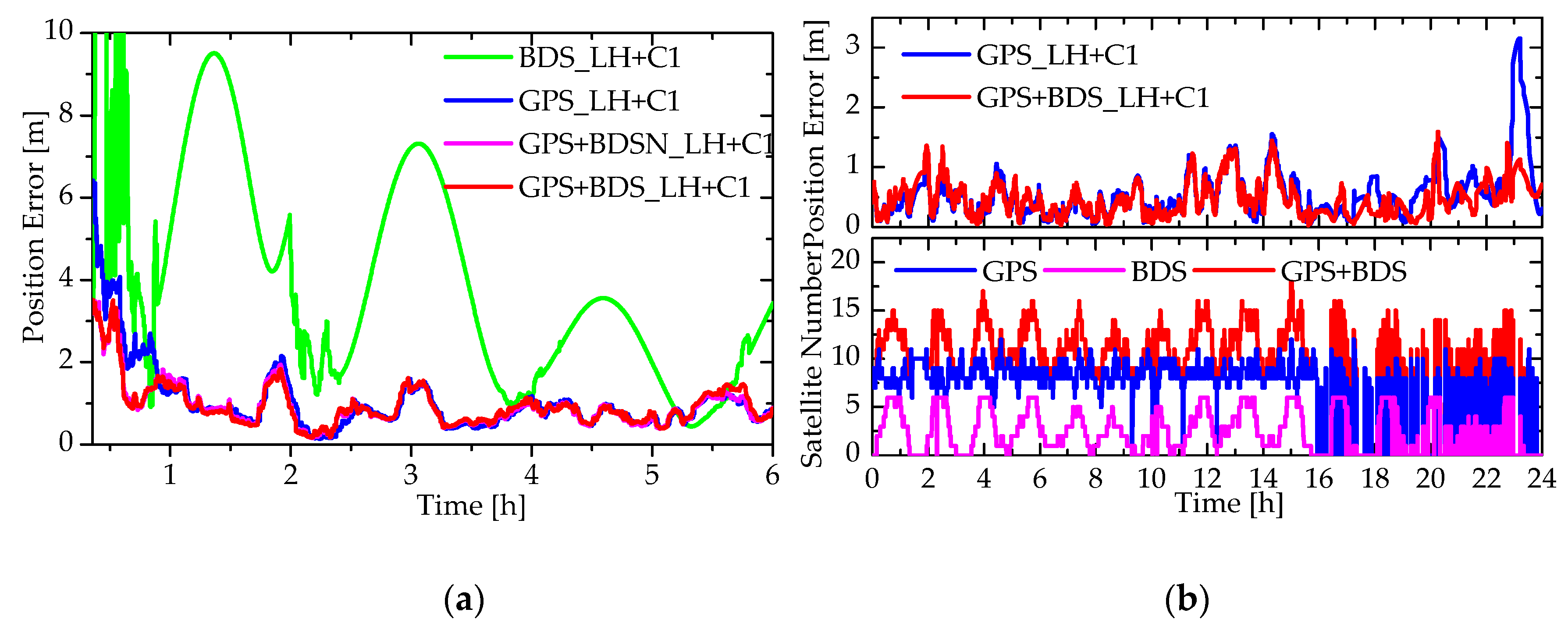
3.5. Impact of GPS/BDS Fusion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fang, B.T.; Seifert, E. An evaluation of Global Positioning System data for Landsat-4 orbit determination. In Proceedings of the AIAA 23rd Space Sciences Meeting, Reno, NV, USA, 14–17 January 1985. [Google Scholar]
- Montenbruck, O.; Ramos-Bosch, P. Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut. 2008, 12, 187–198. [Google Scholar] [CrossRef]
- Wang, F.; Gong, X.; Sang, J.; Zhang, X. A novel method for precise onboard real-time orbit determination with a standalone GPS receiver. Sensors 2015, 15, 30403–34018. [Google Scholar] [CrossRef] [PubMed]
- Cerri, L.; Berthias, J.P.; Bertiger, W.I.; Haines, B.J.; Lemoine, F.G.; Mercier, F.; Ries, J.C.; Willis, P.; Zelensky, N.P.; Ziebart, M. Precision orbit determination standards for the Jason series of altimeter missions. Mar. Geod. 2010, 33, 379–418. [Google Scholar] [CrossRef]
- Li, M.; Li, W.; Shi, C.; Jiang, K.; Guo, X.; Dai, X.; Meng, X.; Yang, Z.; Yang, G.; Liao, M. Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J. Geod. 2017, 91, 1313–1327. [Google Scholar] [CrossRef] [Green Version]
- Sweeting, M.N. Modern small satellites-changing the economics of space. Proc. IEEE 2018, 106, 343–361. [Google Scholar] [CrossRef]
- Collins, J.T.; Conger, R.E. MANS: Autonomous navigation and orbit control for communications satellites. In Proceedings of the 15th AIAA International Communications Satellites Systems Conference, San Diego, CA, USA, 28 February–3 March 1994. [Google Scholar]
- Guinn, J.R.; Williams, B.G.; Wolff, P.J.; Fennessey, R.; Wiest, T. TAOS orbit determination results using Global Positioning Satellites. Adv. Astronaut. Sci. 1995, 89, 95–146. [Google Scholar]
- Wertz, J.R. Autonomous navigation and autonomous orbit control in planetary orbits as a means of reducing operations cost. In Proceedings of the 5th International Symposium on Reducing the Cost of Spacecraft Ground Systems and Operations, Pasadena, CA, USA, 8–11 July 2003. [Google Scholar]
- Plam, Y.; Allen, R.V.; Wertz, J.; Bauer, T. Autonomous orbit control experience on TacSat-2 using Microcosm’s Orbit Control Kit (OCK). In Proceedings of the 31st Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, 1–6 February 2008. [Google Scholar]
- Hart, R.C.; Hartman, K.R.; Long, A.C.; Lee, T.; Oza, D.H. Global Positioning System (GPS) Enhanced Orbit Determination Experiment (GEODE) on the small satellite technology initiative (SSTI) lewis spacecraft. In Proceedings of the ION-GPS-1996, Kansas City, MO, USA, 17–20 September 1996. [Google Scholar]
- Hart, R.C.; Long, A.C.; Lee, T. Autonomous navigation of the SSTI/Lewis spacecraft using the Global Positioning System (GPS). In Proceedings of the Flight Mechanics Symposium, GSFC, Greenbelt, MD, USA, 19–21 May 1997. [Google Scholar]
- Gill, E.; Montenbruck, O.; Brieß, K. GPS-based autonomous navigation for the BIRD satellite. In Proceedings of the 15th International Symposium on Spaceflight Dynamics, Biarritz, France, 26–30 June 2000. [Google Scholar]
- Gill, E.; Montenbruck, O.; Brieß, K. Flight experience of the BIRD onboard navigation system. In Proceedings of the 16th International Symposium on Space Flight Dynamics, Pasadena, CA, USA, 3–7 December 2001. [Google Scholar]
- Gill, E.; Montenbruck, O.; Kayal, H. The BIRD satellite mission as a milestone toward GPS-based autonomous navigation. Navigation 2001, 48, 69–75. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E.; Markgraf, M. Phoenix-XNS—A miniature real-time navigation system for LEO satellites. In Proceedings of the NAVITEC’2006, Noordwijk, The Netherlands, 11–13 December 2006. [Google Scholar]
- Gill, E.; Montenbruck, O.; Arichandran, K.; Tan, S.H.; Bretschneider, T. High-precision onboard orbit determination for small satellites-the GPS-based XNS on X-SAT. In Proceedings of the 6th Symposium on Small Satellites Systems and Services, La Rochelle, France, 20–24 September 2004. [Google Scholar]
- Montenbruck, O.; Nortier, B.; Mostert, S. A miniature GPS receiver for precise orbit determination of the Sunsat 2004 micro-satellite. In Proceedings of the 2004 National Technical Meeting of The Institute of Navigation (ION NTM 2004), San Diego, CA, USA, 26–28 January 2004. [Google Scholar]
- Montenbruck, O.; Markgraf, M.; Naudet, J.; Santandrea, S.; Gantois, K.; Vuilleumier, P. Autonomous and precise navigation of the PROBA-2 spacecraft. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Montenbruck, O.; Swatschina, P.; Markgraf, M.; Santandrea, S.; Naudet, J.; Tilmans, E. Precision spacecraft navigation using a low-cost GPS receiver. GPS Solut. 2012, 16, 519–529. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, X.; Qu, L.; Zhao, Q. Precise orbit determination of FY-3C with calibration of orbit biases in BeiDou GEO satellites. Remote Sens. 2018, 10, 382. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Geng, J.; Lou, Y.; Ge, M.; Liu, J. Recent development of PANDA software in GNSS data processing. In Proceedings of the International Conference on Earth Observation Data Processing and Analysis (ICEODPA), Wuhan, China, 28–30 December 2008. [Google Scholar]
- Wang, F. Theory and Software Development on Autonomous Orbit Determination Using Space-Borne GPS Measurements. Ph.D. Thesis, Wuhan University, Wuhan, China, 2006. [Google Scholar]
- Gong, X. Key Technologies and Software toward Decimeter-Level Autonomous Orbit Determination with Space-Borne GPS Carrier-Phase Measurements. Master’s Thesis, Wuhan University, Wuhan, China, 2015. [Google Scholar]
- Odijk, D.; Nadarajah, N.; Zaminpardaz, S.; Teunissen, P.J.G. GPS, Galileo, QZSS and IRNSS differential ISBs: Estimation and application. GPS Solut. 2017, 21, 439–450. [Google Scholar] [CrossRef]
- Nicolini, L.; Caporali, A. Investigation on Reference Frames and Time Systems in Multi-GNSS. Remote Sens. 2018, 10, 80. [Google Scholar] [CrossRef]
- Torre, A.D.; Caporali, A. An analysis of intersystem biases for multi-GNSS positioning. GPS Solut. 2015, 19, 297–307. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E. Ionospheric correction for GPS tracking of LEO satellites. J. Navig. 2002, 55, 293–304. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Onboard RTOD (SATPODS) | Post POD (PANDA) |
|---|---|---|
| Measurement model | ||
| GNSS data | Single-frequency GPS/BeiDou Navigation System (BDS) phase and pseudo-range measurements (LH + C1) for the FY3C satellite; and single-frequency pseudo-range data (C1) for the YG30/SAT1–SAT6 satellites (interval 30 s) | Dual-frequency GPS/BDS phase and pseudo-range measurements for the FY3C satellite; and single-frequency pseudo-range data (C1) for the YG30/SAT1–SAT6 satellites (interval 10 s) |
| GNSS orbit and clock | Broadcast ephemeris | IGS MGEX final precise orbit and clock products |
| Receiver clock | A receiver clock offset and a bias between GPS and BDS system | Epoch-wise receiver clock offset and a bias between GPS and BDS system |
| Ambiguity | Pseudo-Ambiguity with a random walk process | Real constant value for each ambiguity pass |
| Dynamical model | ||
| Earth gravity field | Truncated EGM 2008 with low order and degree, neglect the time-varying part | EIGEN-6S, adopt 120 × 120, include the time-varying part |
| N-body gravitation | Moon and Sun only, low precision analytic method (position) | Moon, Sun and other planets, JPL DE405 (position) |
| Solid earth tide | Simplified model, solid only | IERS Conventions 2010 |
| Earth pole tide | Neglected | IERS Conventions 2010 |
| Ocean tide | Neglected | FES2004 |
| Ocean pole tide | Neglected | IERS Conventions 2010 |
| Relativistic effects | Neglected | IERS Conventions 2010 |
| Atmosphere drag | Modified Harris-Priester model (density), fixed effective area, drag coefficient with a random walk process | DTM94 model (density), macro model, drag coefficients every 360 min |
| Solar radiation | Cannonball model, fixed effective area, radiation pressure coefficient with a random walk process | Macro model, radiation pressure coefficients every 360 min |
| Earth radiation | Neglected | Macro model, radiation pressure coefficients every 360 min |
| Empirical acceleration | three empirical accelerations in radial, along-track and cross with a first-order Gauss-Markov model | One-cycle-per-orbit-revolution (1CPR) empirical accelerations in radial, along-track and cross |
| Reference frame | ||
| Coordinate system | WGS84/CGCS2000 | ITRF 2008/ITRF 2014 |
| Precession/nutation | IAU1976/IAU 1980 simplified model | IAU 2006/IAU 2000R06 model |
| Earth rotation parameter | Rapid predicted EOP in IERS Bulletin A | IERS final EOP products |
| Estimation | ||
| Estimator | EKF filter | Least square |
| Mode | Sequential processing in real-time | Batch processing |
| SAT | Overlap Orbit Difference (cm) | External Orbit Difference (cm) | 3D Orbit Accuracy (cm) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | A | C | 1D | 3D | R | A | C | 1D | 3D | |||
| FY3C | 2.4 | 6.7 | 5.3 | 5.1 | 8.9 | 3.3 | 10.7 | 7.0 | 7.6 | 13.2 | 10–15 | |
| Ratio | 1.35 | 1.59 | 1.33 | 1.49 | 1.49 | |||||||
| SAT1 | 2.9 | 8.5 | 9.7 | 7.7 | 13.3 | ~3.9 | ~13.6 | ~12.9 | ~11.4 | ~19.7 | ~20–25 | |
| SAT2 | 5.8 | 14.5 | 7.6 | 10.0 | 17.4 | ~7.8 | ~23.2 | ~10.0 | ~14.9 | ~25.9 | ||
| SAT3 | 3.6 | 9.4 | 9.6 | 8.0 | 13.9 | ~4.9 | ~14.9 | ~12.7 | ~11.9 | ~20.6 | ||
| SAT4 | 4.0 | 12.0 | 8.8 | 8.9 | 15.5 | ~5.4 | ~19.2 | ~11.7 | ~13.3 | ~23.0 | ||
| SAT5 | 3.6 | 9.8 | 6.5 | 7.1 | 12.3 | ~4.8 | ~15.6 | ~8.7 | ~10.6 | ~18.3 | ||
| SAT6 | 4.1 | 12.2 | 10.4 | 9.6 | 16.6 | ~5.6 | ~19.5 | ~13.8 | ~14.2 | ~24.6 | ||
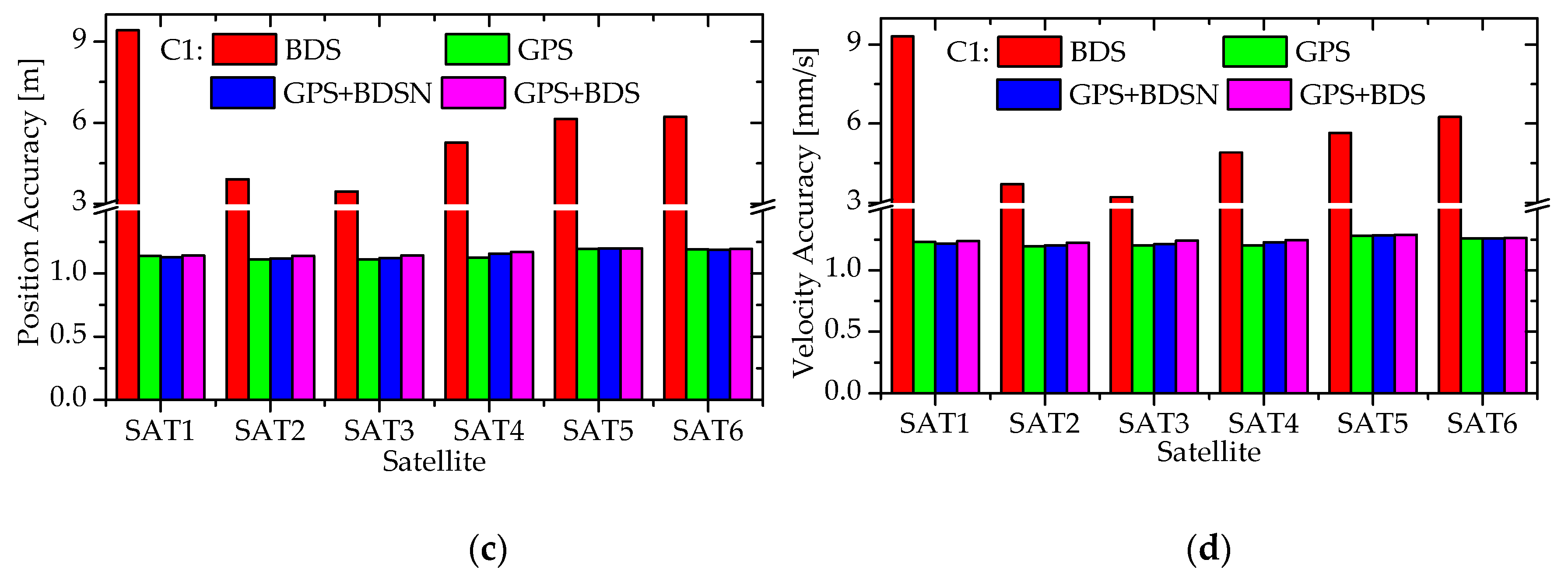
| Accuracy (RMS) | Position/m | Velocity/mm/s | ||||||
|---|---|---|---|---|---|---|---|---|
| R | A | C | 3D | R | A | C | 3D | |
| FY3C (LH + C1) | 0.171 | 0.483 | 0.122 | 0.527 | 0.419 | 0.186 | 0.139 | 0.479 |
| FY3C (C1) | 0.467 | 0.672 | 0.217 | 0.847 | 0.618 | 0.385 | 0.231 | 0.764 |
| SAT1 (C1) | 0.561 | 0.947 | 0.307 | 1.143 | 1.088 | 0.502 | 0.319 | 1.240 |
| SAT2 (C1) | 0.567 | 0.929 | 0.340 | 1.140 | 1.052 | 0.512 | 0.359 | 1.224 |
| SAT3 (C1) | 0.581 | 0.946 | 0.277 | 1.144 | 1.089 | 0.520 | 0.296 | 1.242 |
| SAT4 (C1) | 0.504 | 0.981 | 0.396 | 1.171 | 1.061 | 0.491 | 0.427 | 1.245 |
| SAT5 (C1) | 0.572 | 0.977 | 0.399 | 1.200 | 1.088 | 0.542 | 0.438 | 1.292 |
| SAT6 (C1) | 0.514 | 0.977 | 0.463 | 1.197 | 1.061 | 0.490 | 0.492 | 1.268 |
| PDOP | BDS | GPS | GPS + BDSN | GPS + BDS |
|---|---|---|---|---|
| FY3C | 5.499 | 2.471 | 2.247 | 2.123 |
| SAT1 | 5.148 | 1.261 | 1.244 | 1.221 |
| SAT2 | 4.995 | 1.281 | 1.252 | 1.236 |
| SAT3 | 5.854 | 1.268 | 1.247 | 1.222 |
| SAT4 | 5.258 | 1.313 | 1.293 | 1.269 |
| SAT5 | 5.630 | 1.320 | 1.295 | 1.275 |
| SAT6 | 5.726 | 1.295 | 1.266 | 1.244 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, X.; Guo, L.; Wang, F.; Zhang, W.; Sang, J.; Ge, M.; Schuh, H. Precise Onboard Real-Time Orbit Determination with a Low-Cost Single-Frequency GPS/BDS Receiver. Remote Sens. 2019, 11, 1391. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111391
Gong X, Guo L, Wang F, Zhang W, Sang J, Ge M, Schuh H. Precise Onboard Real-Time Orbit Determination with a Low-Cost Single-Frequency GPS/BDS Receiver. Remote Sensing. 2019; 11(11):1391. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111391
Chicago/Turabian StyleGong, Xuewen, Lei Guo, Fuhong Wang, Wanwei Zhang, Jizhang Sang, Maorong Ge, and Harald Schuh. 2019. "Precise Onboard Real-Time Orbit Determination with a Low-Cost Single-Frequency GPS/BDS Receiver" Remote Sensing 11, no. 11: 1391. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11111391