Dip Filter and Random Noise Suppression for GPR B-Scan Data Based on a Hybrid Method in f - x Domain

 , ,
, ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methods
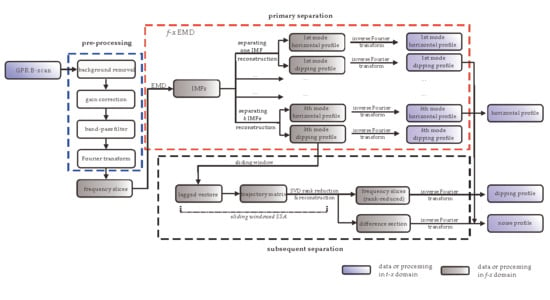
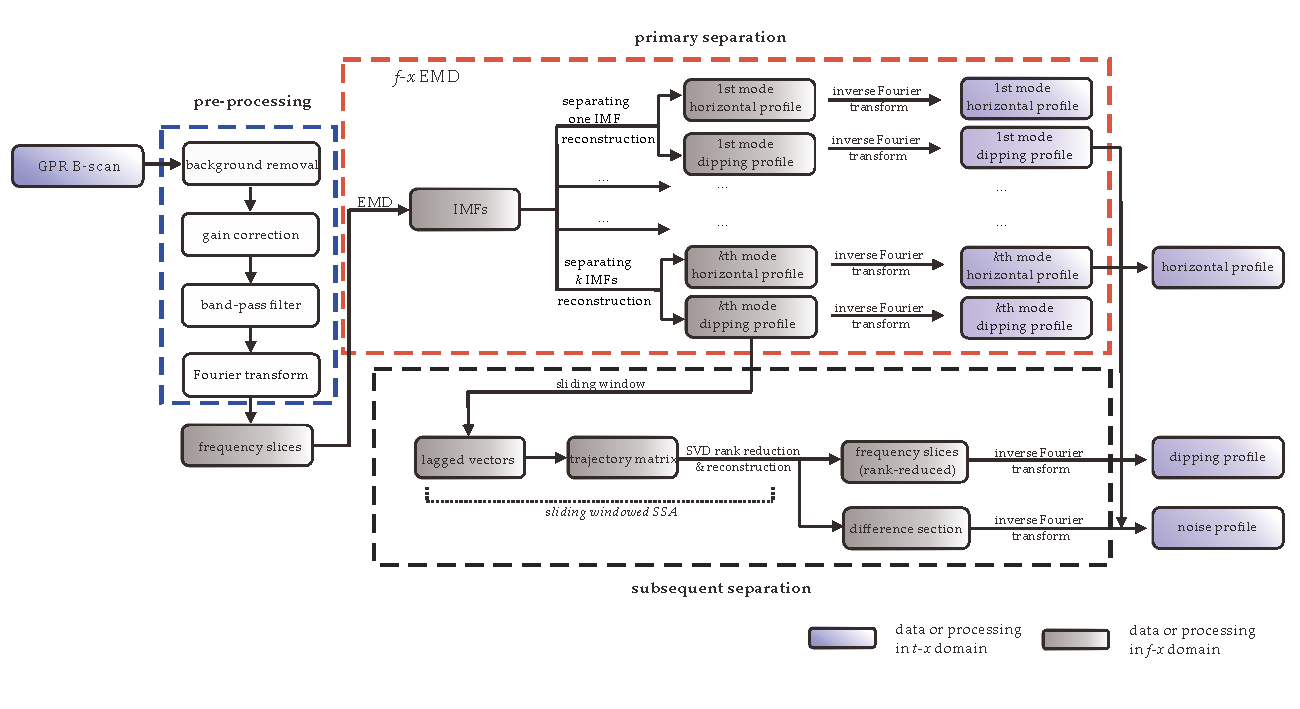
2.1. Dip Filter Based On the f - x EMD
2.2. The Hybrid Approach in f - x Domain
3. Results
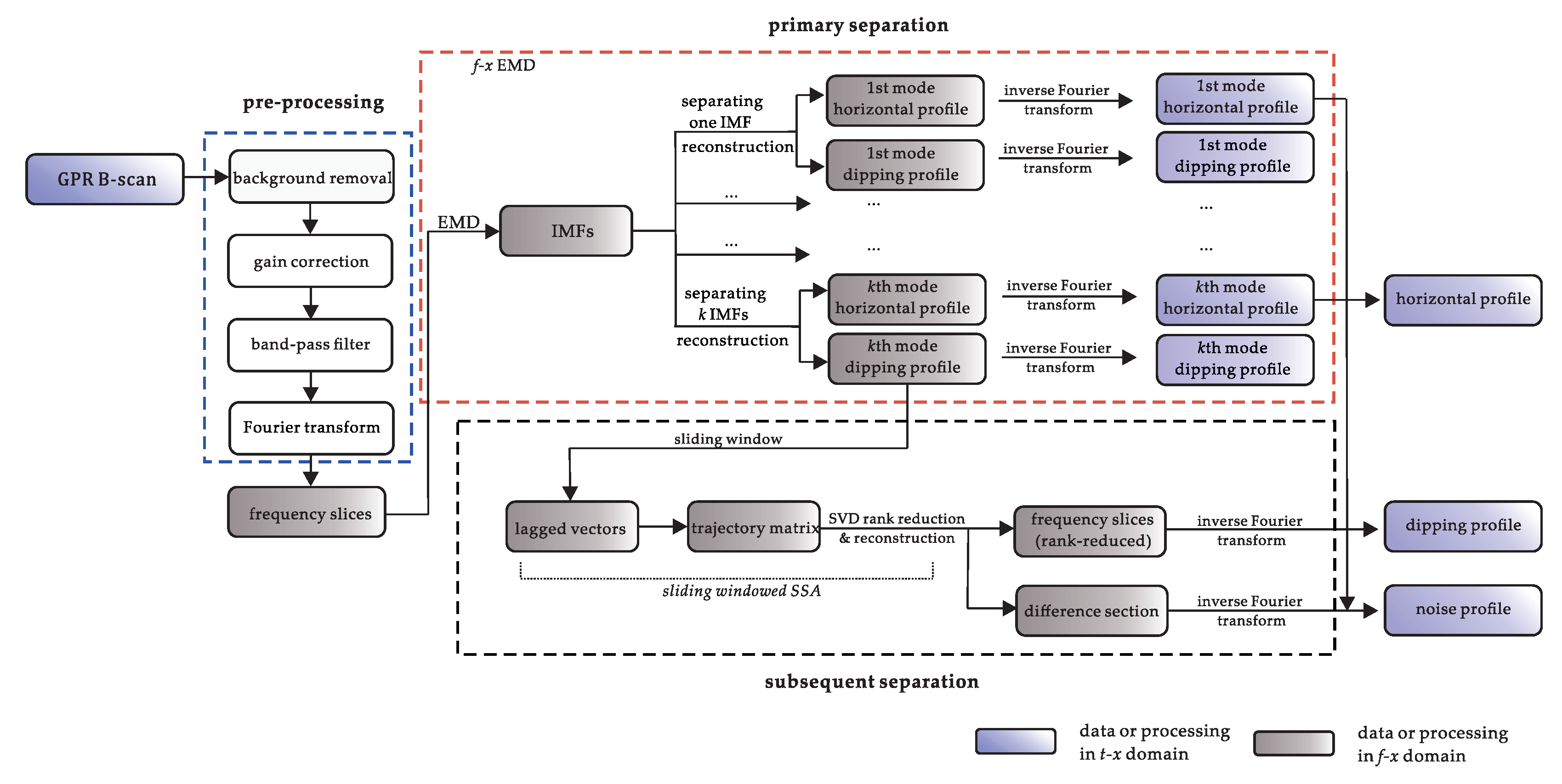
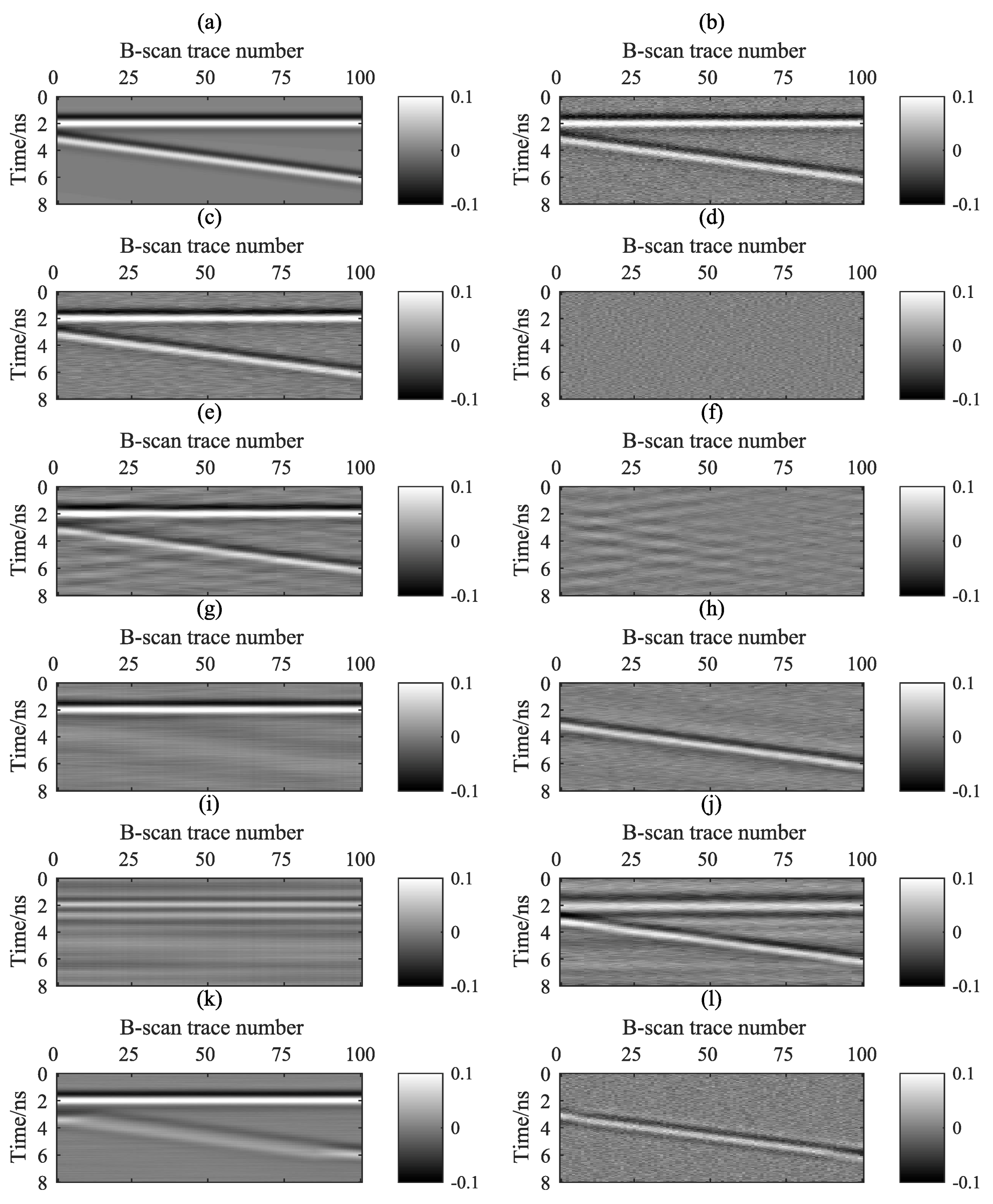
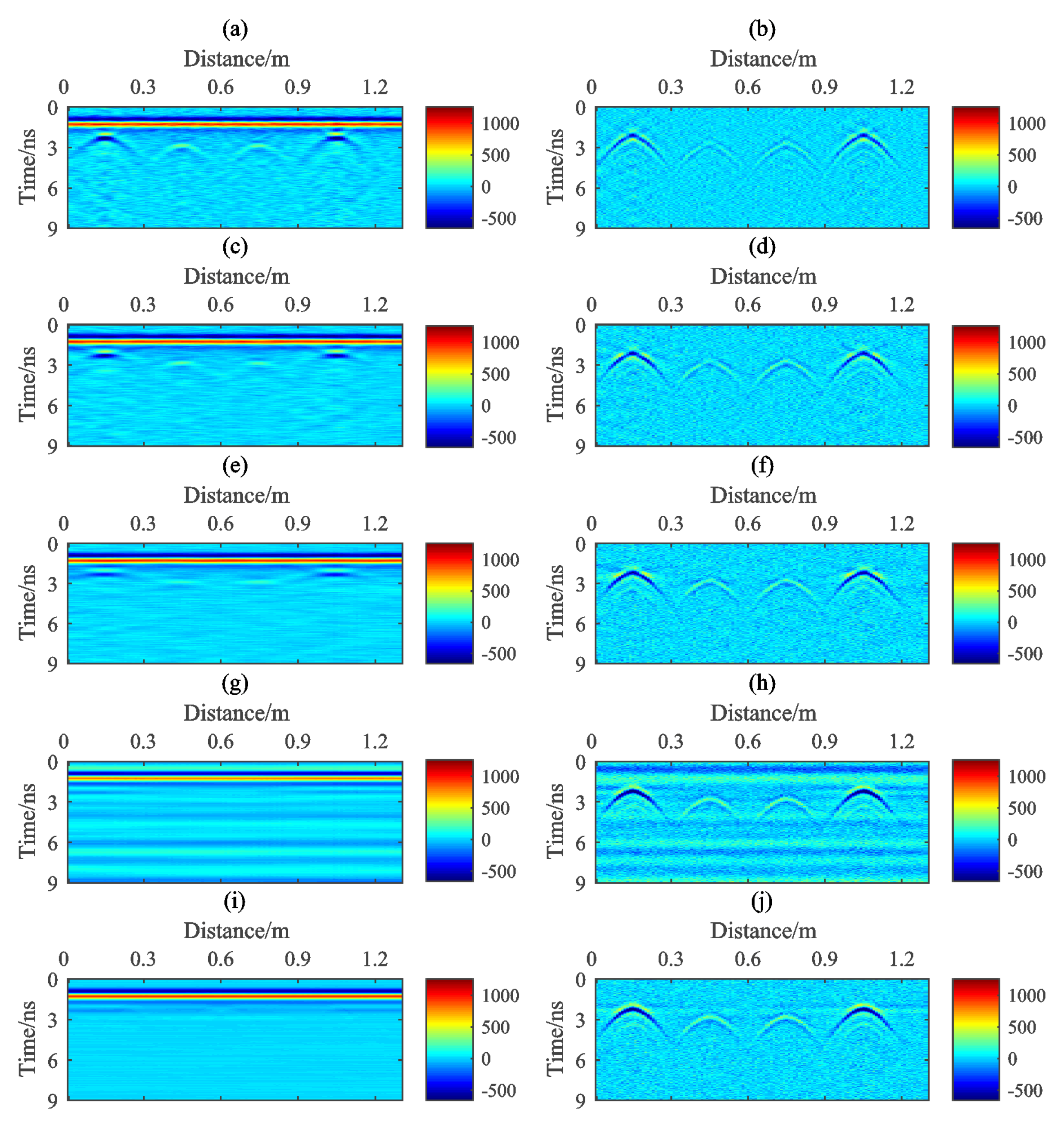
3.1. Synthetic Data Tests
3.2. Forward Simulation Data Tests
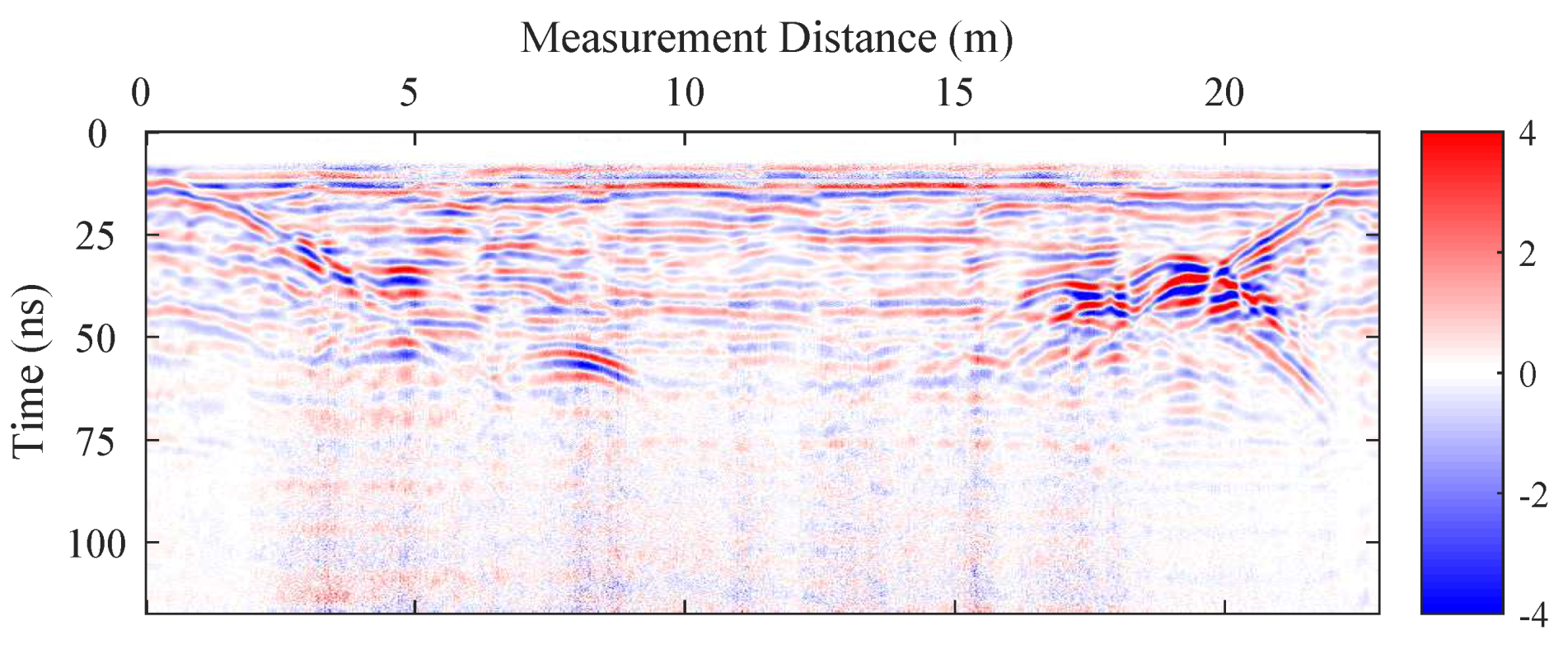
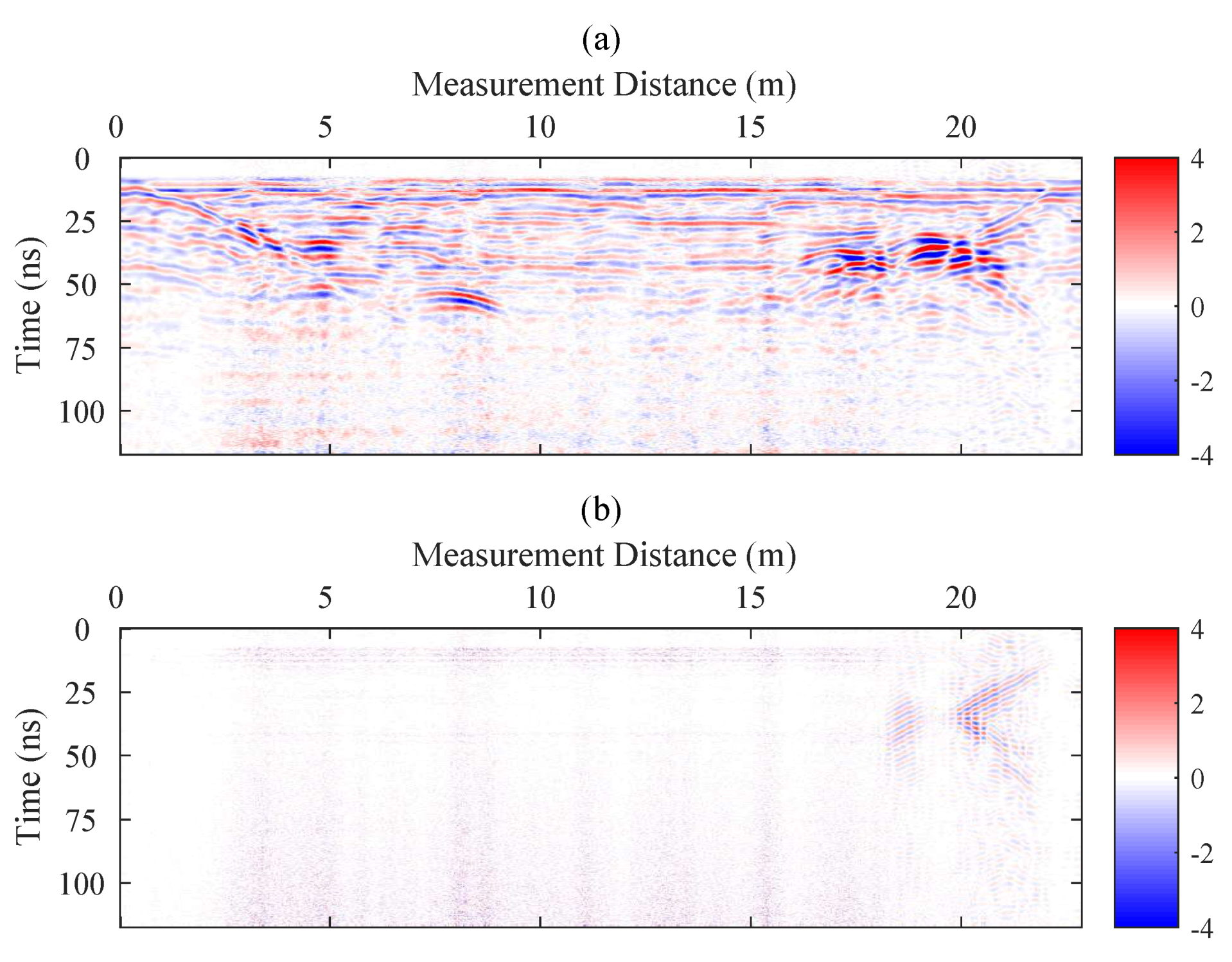
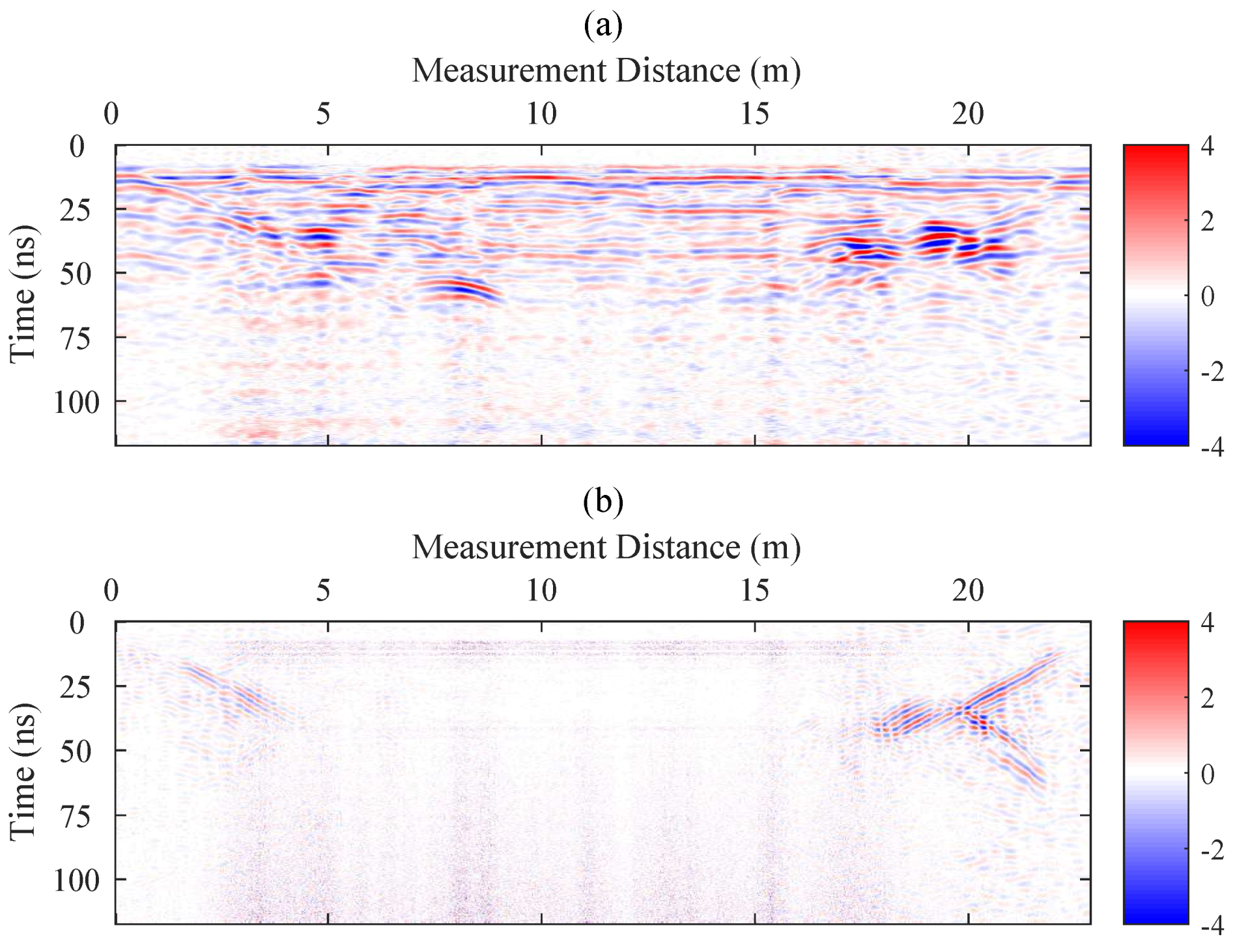
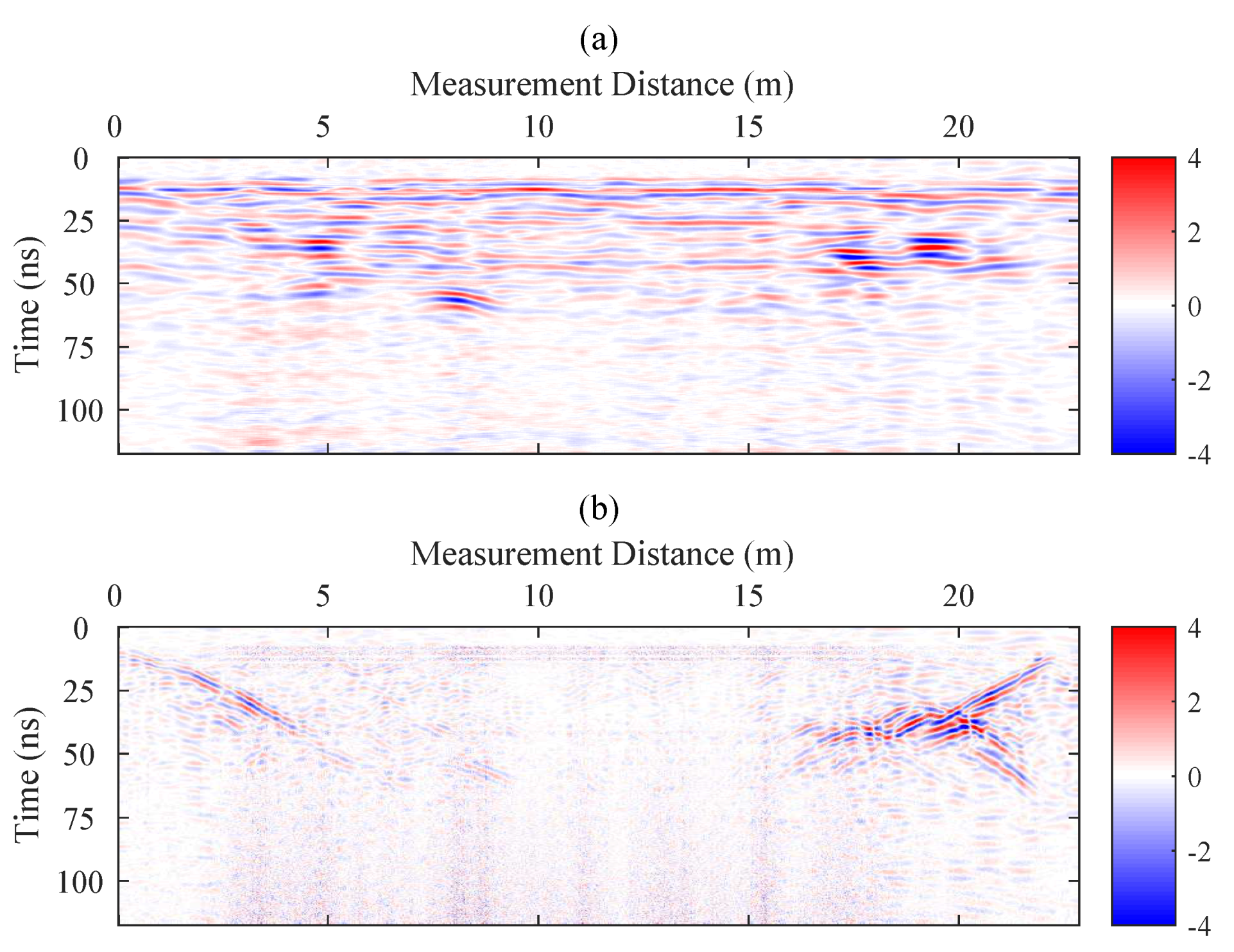
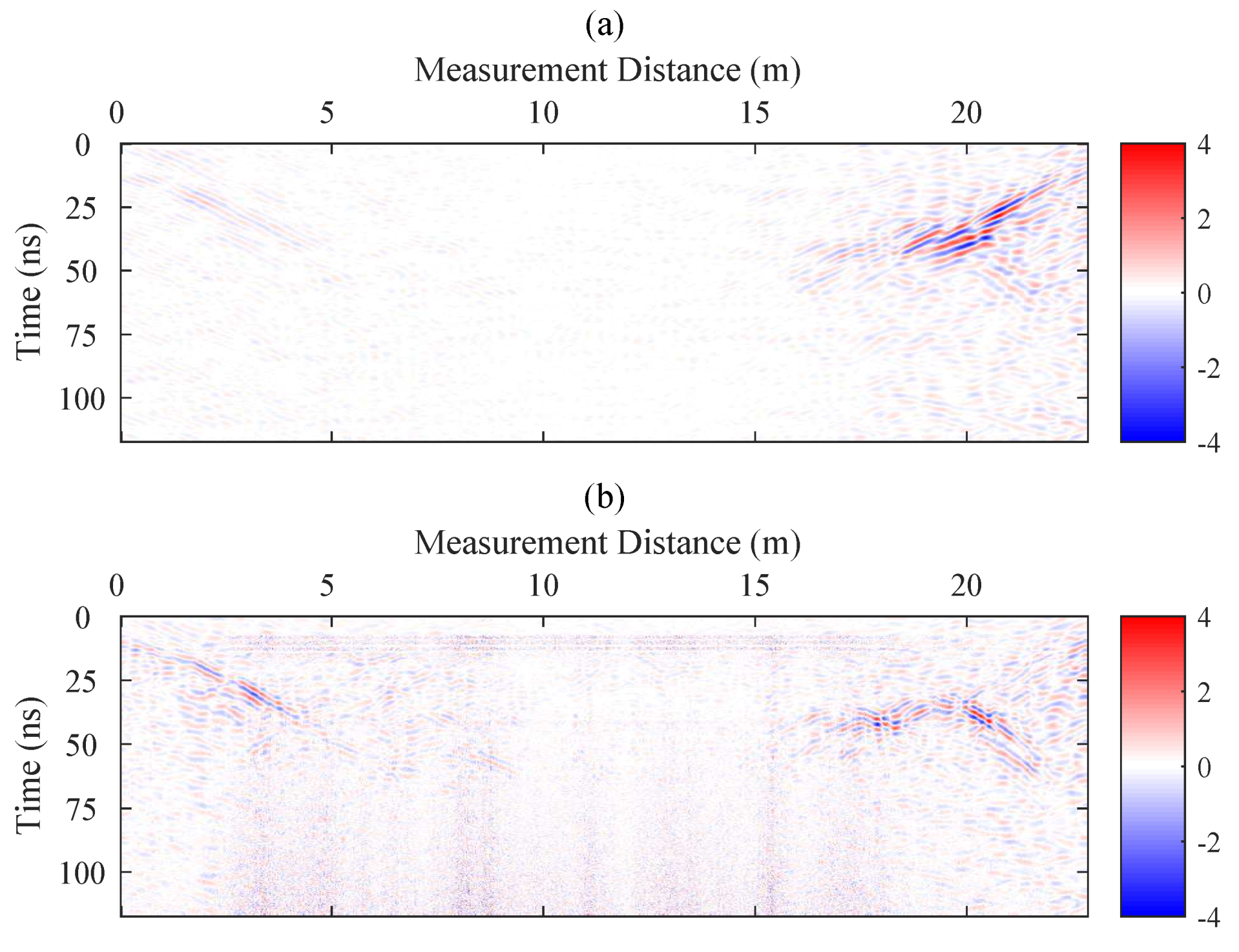
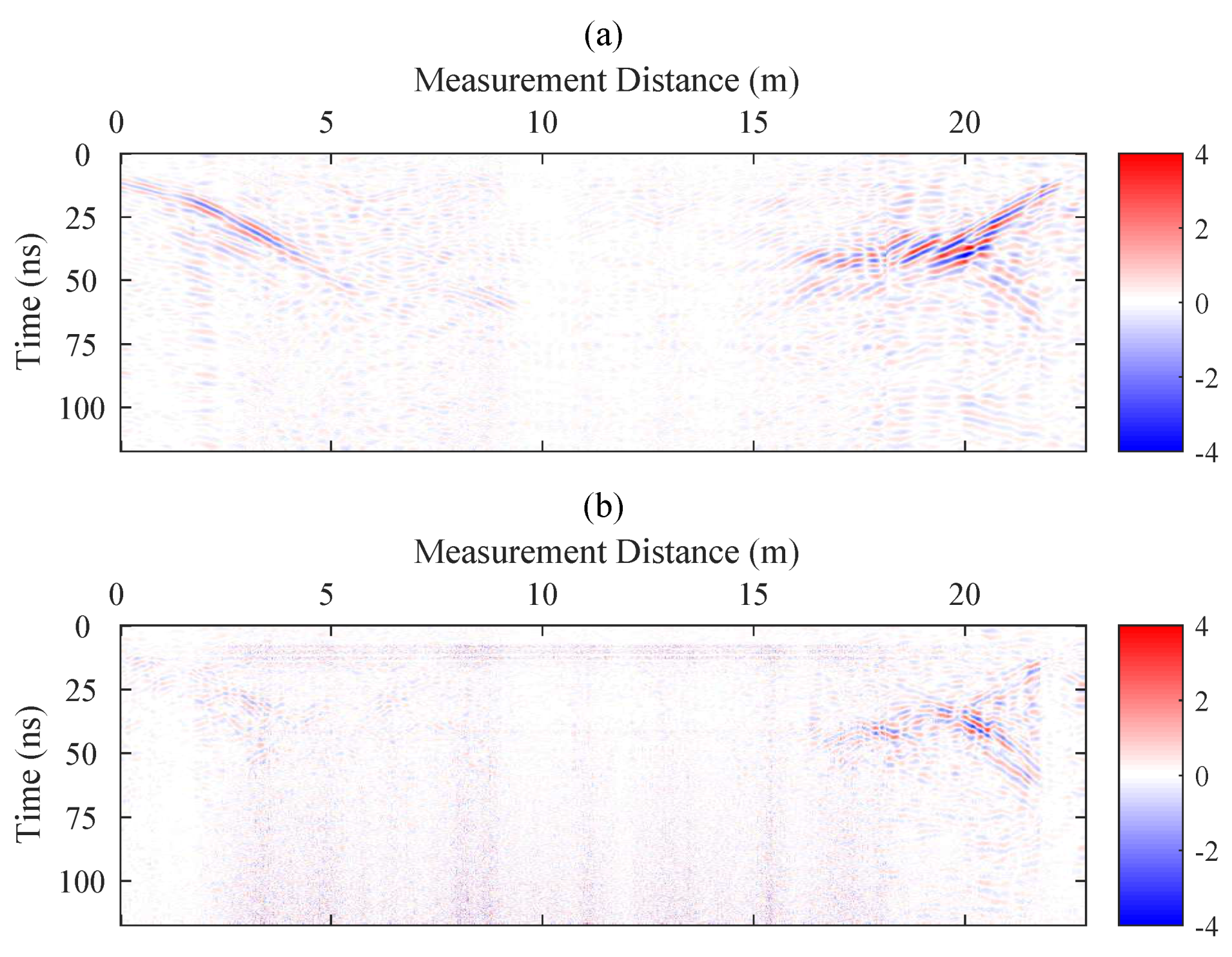
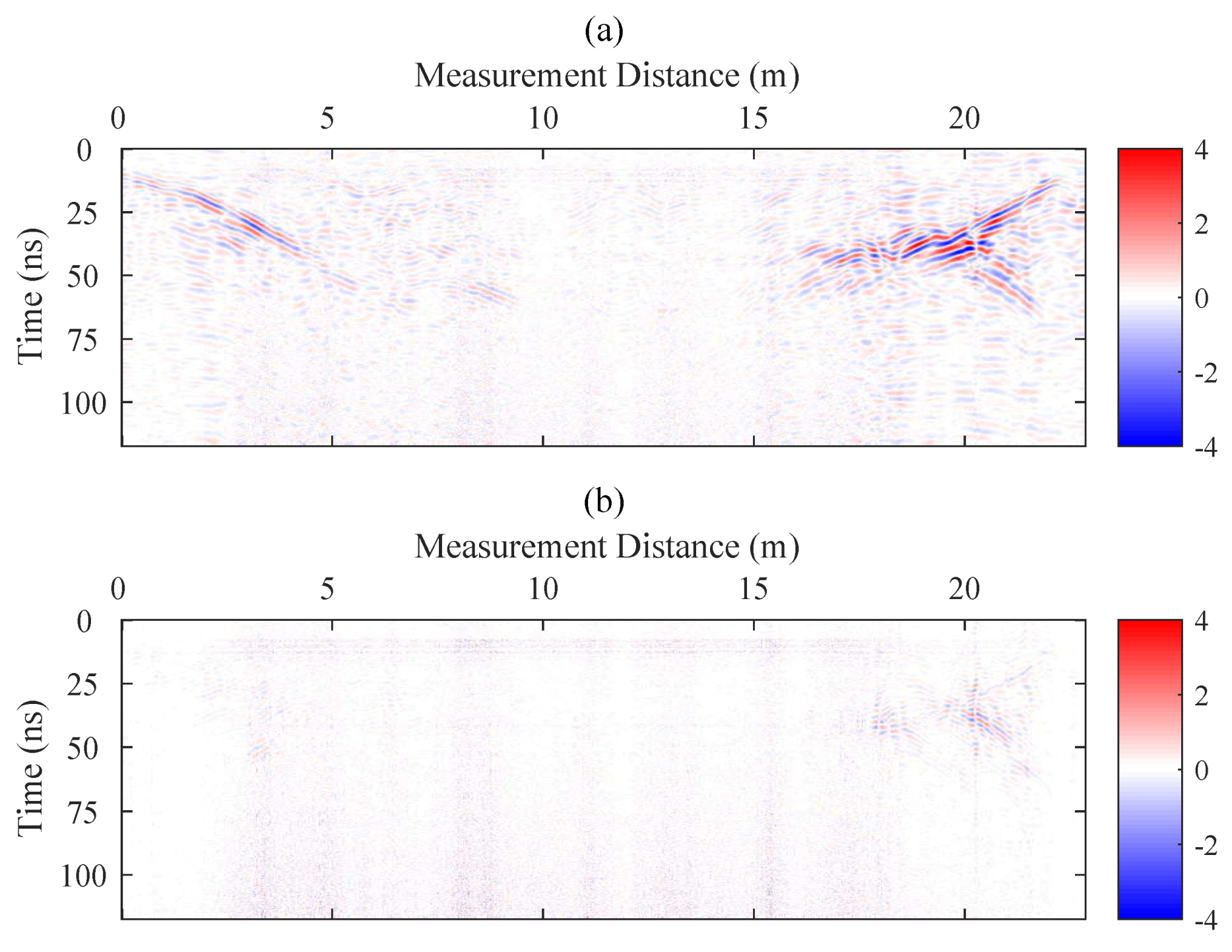
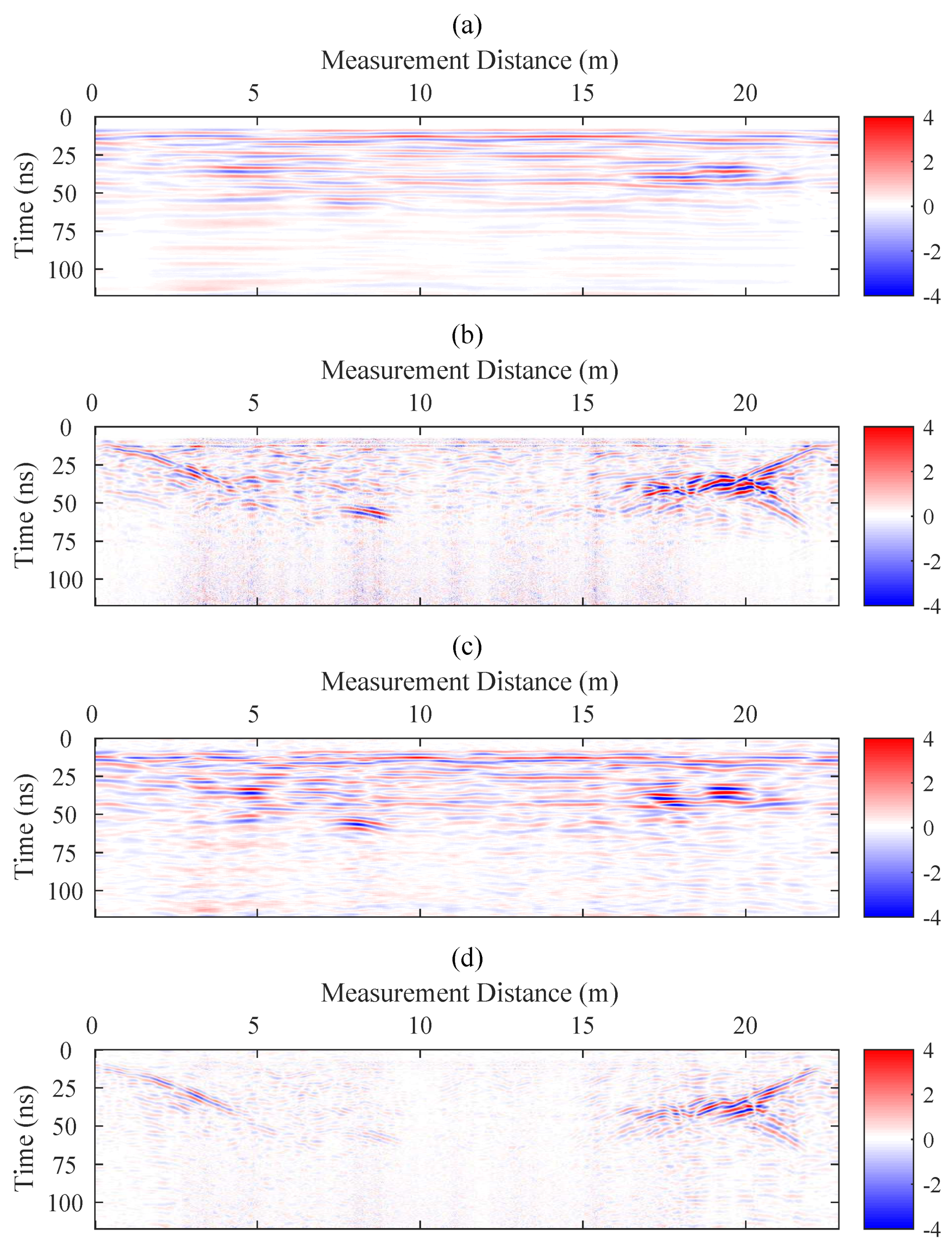
3.3. Field Data Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| GPR | Ground-Penetrating Radar |
| EMD | Empirical Mode Decomposition |
| IMF | Intrinsic Mode Function |
| SSA | Singular Spectrum Analysis |
| SNR | Signal-to-noise Ratio |
References
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; D’Amico, F. An Overview of Ground-Penetrating Radar Signal Processing Techniques for Road Inspections. Signal Process. 2017, 132, 201–209. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S. Editorial for Special Issue “Recent Advances in GPR Imaging”. Remote Sens. 2018, 10, 676. [Google Scholar] [CrossRef]
- Tzanis, A. Detection and Extraction of Orientation-and-Scale-Dependent Information from Two-Dimensional GPR Data with Tuneable Directional Wavelet Filters. J. Appl. Geophys. 2013, 89, 48–67. [Google Scholar] [CrossRef]
- Tzanis, A. MatGPR Release 2: A Freeware Matlab® Package for the Analysis and Interpretation of Common and Single Offset GPR Data. FastTimes 2010, 15, 17–43. [Google Scholar]
- Tzanis, A.; Kafetsis, G. A Freeware Package for the Analysis and Interpretation of Common-Offset Ground Probing Radar Data, Based on General Purpose Computing Engines. Bull. Geol. Soc. Greece 2004, 36, 1347–1354. [Google Scholar] [CrossRef]
- Davies, E. Machine Vision: Theory, Algorithms and Practicalities; Academic Press: Waltham, MA, USA, 1990; pp. 51–60. [Google Scholar]
- Spitz, S. Seismic Trace Interpolation in the F-X Domain. Geophysics 1991, 56, 785–794. [Google Scholar] [CrossRef]
- Hornbostel, S. Spatial Prediction Filtering in the t-x and f-x Domains. Geophysics 1991, 56, 2019–2026. [Google Scholar] [CrossRef]
- Nuzzo, L.; Quarta, T. Improvement in GPR Coherent Noise Attenuation Using τ-p and Wavelet Transforms. Geophysics 2004, 69, 789–802. [Google Scholar] [CrossRef]
- Herrmann, F.; Wang, D.; Hennenfent, G.; Moghaddam, P. Curvelet-Based Seismic Data Processing: A Multiscale and Nonlinear Approach. Geophysics 2008, 73. [Google Scholar] [CrossRef]
- Terrasse, G.; Nicolas, J.; Trouvé, E.; Drouet, É. Application of the Curvelet Transform for Clutter and Noise Removal in GPR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4280–4294. [Google Scholar] [CrossRef]
- Wang, X.; Liu, S. Noise Suppressing and Direct Wave Arrivals Removal in GPR Data Based on Shearlet Transform. Signal Process. 2017, 132, 227–242. [Google Scholar] [CrossRef]
- Bekara, M.; van der Baan, M. Random and Coherent Noise Attenuation by Empirical Mode Decomposition. Geophysics 2009, 74, V89–V98. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, J. Random Noise Attenuation by f-x Empirical-Mode Decomposition Predictive Filtering. Geophysics 2014, 79, V81–V91. [Google Scholar] [CrossRef]
- Chen, Y.; Gan, S.; Liu, T.; Yuan, J.; Zhang, Y.; Jin, Z. Random Noise Attenuation by a Selective Hybrid Approach Using f-x Empirical Mode Decomposition. J. Geophys. Eng. 2015, 12, 12. [Google Scholar] [CrossRef]
- Cagnoli, B.; Ulrych, T.J. Singular Value Decomposition and Wavy Reflections in Ground-Penetrating Radar Images of Base Surge Deposits. J. Appl. Geophys. 2001, 48, 175–182. [Google Scholar] [CrossRef]
- Zhang, X.; Nilot, E.; Feng, X.; Ren, Q.; Zhang, Z. Imf-Slices for Gpr Data Processing Using Variational Mode Decomposition Method. Remote Sens. 2018, 10, 476. [Google Scholar] [CrossRef]
- Oropeza, V.; Sacchi, M. Simultaneous Seismic Data Denoising and Reconstruction Via Multichannel Singular Spectrum Analysis. Geophysics 2011, 76, V25–V32. [Google Scholar] [CrossRef]
- Elsner, J.B.; Tsonis, A.A. Singular Spectrum Analysis: A New Tool in Time Series Analysis; Springer: Boston, MA, USA, 1996; pp. 39–50. [Google Scholar]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A Realistic Fdtd Numerical Modeling Framework of Ground Penetrating Radar for Landmine Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 37–51. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. Gprmax: Open Source Software to Simulate Electromagnetic Wave Propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]
- Dérobert, X.; Pajewski, L. TU1208 Open Database of Radargrams: The Dataset of the IFSTTAR Geophysical Test Site. Remote Sens. 2018, 10, 530. [Google Scholar] [CrossRef]
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Feng, X.; Zhang, Z.; Kang, Z.; Chai, Y.; You, Q.; Ding, L. Dip Filter and Random Noise Suppression for GPR B-Scan Data Based on a Hybrid Method in f - x Domain. Remote Sens. 2019, 11, 2180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11182180
Zhang X, Feng X, Zhang Z, Kang Z, Chai Y, You Q, Ding L. Dip Filter and Random Noise Suppression for GPR B-Scan Data Based on a Hybrid Method in f - x Domain. Remote Sensing. 2019; 11(18):2180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11182180
Chicago/Turabian StyleZhang, Xuebing, Xuan Feng, Zhijia Zhang, Zhiliang Kang, Yuan Chai, Qin You, and Liang Ding. 2019. "Dip Filter and Random Noise Suppression for GPR B-Scan Data Based on a Hybrid Method in f - x Domain" Remote Sensing 11, no. 18: 2180. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11182180