Assessing the Impact of GNSS ZTD Data Assimilation into the WRF Modeling System during High-Impact Rainfall Events over Greece

 ,
, 
 and
and
Abstract
:
1. Introduction
2. Materials and Methods
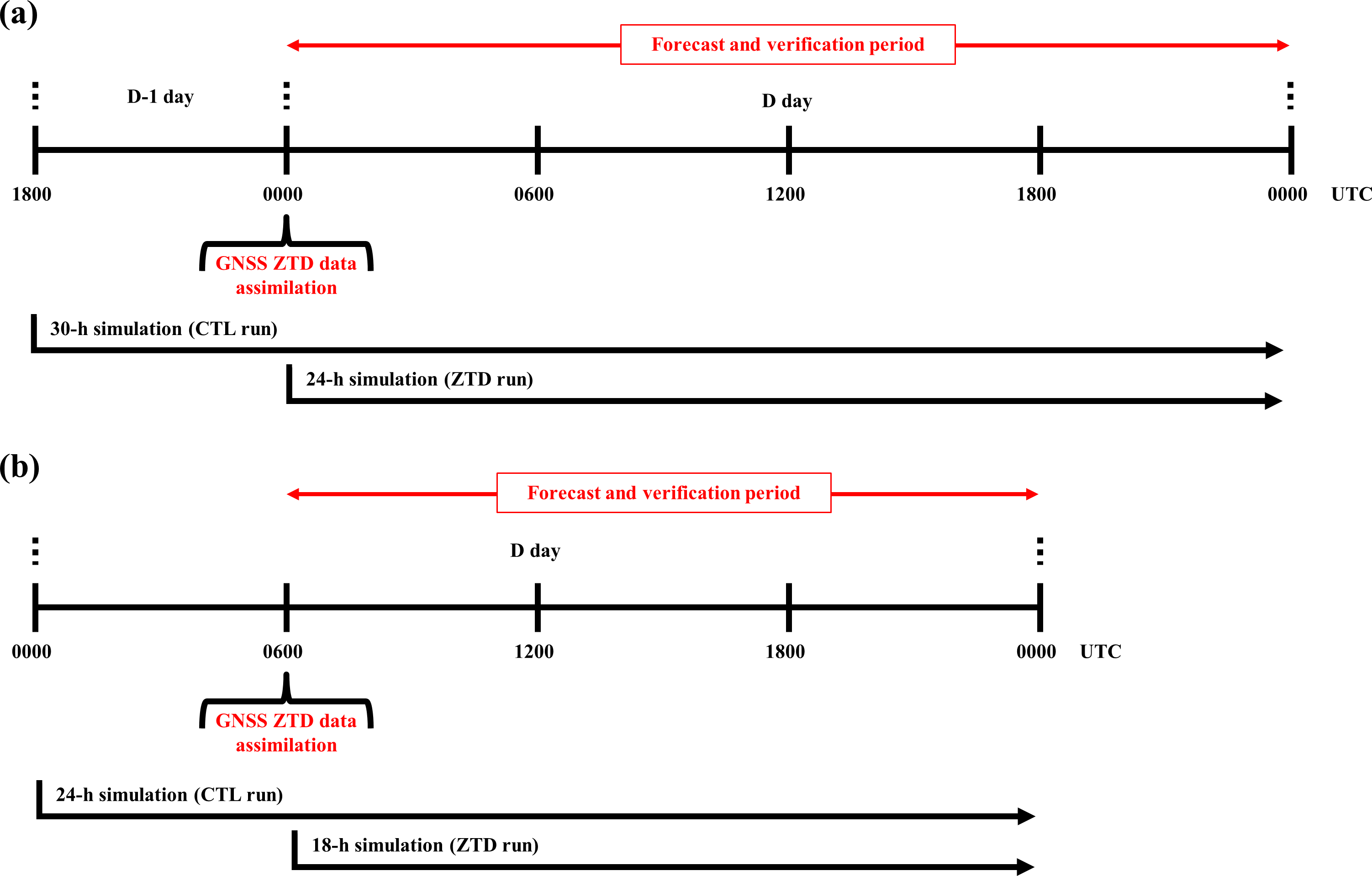
2.1. Case Studies
2.2. The WRF NWP System
2.2.1. Data Assimilation Scheme
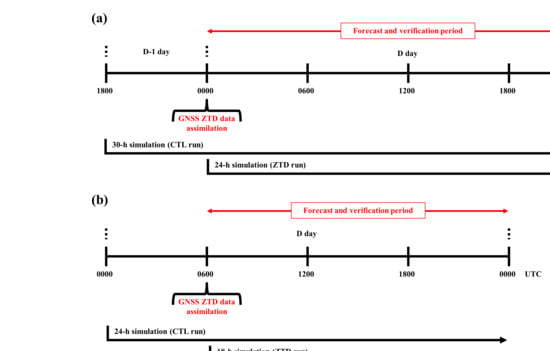
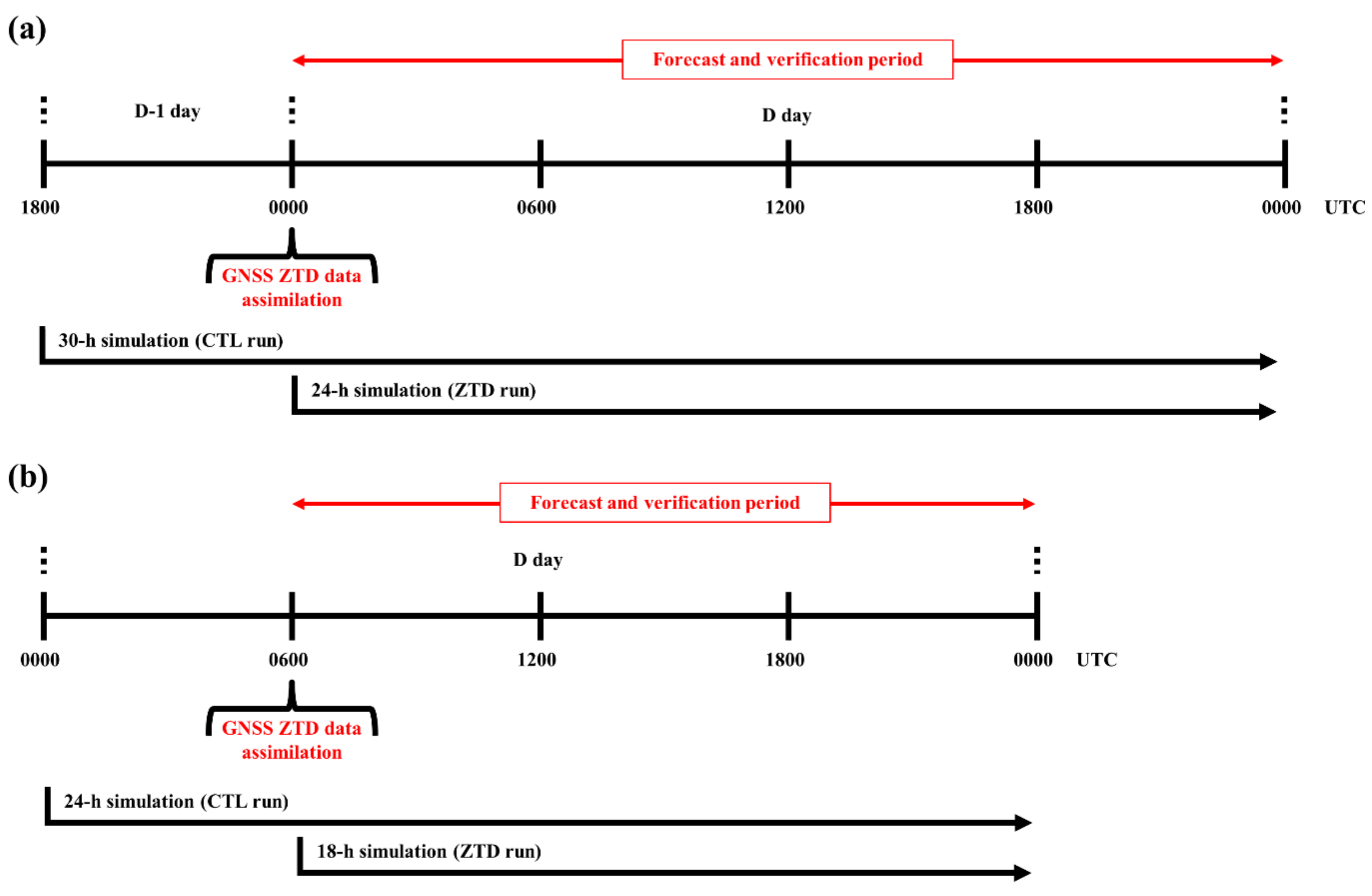
2.2.2. Numerical Experiments
2.3. ZTD Observations
Data Pre-Processing
2.4. Evaluation Process
3. Results
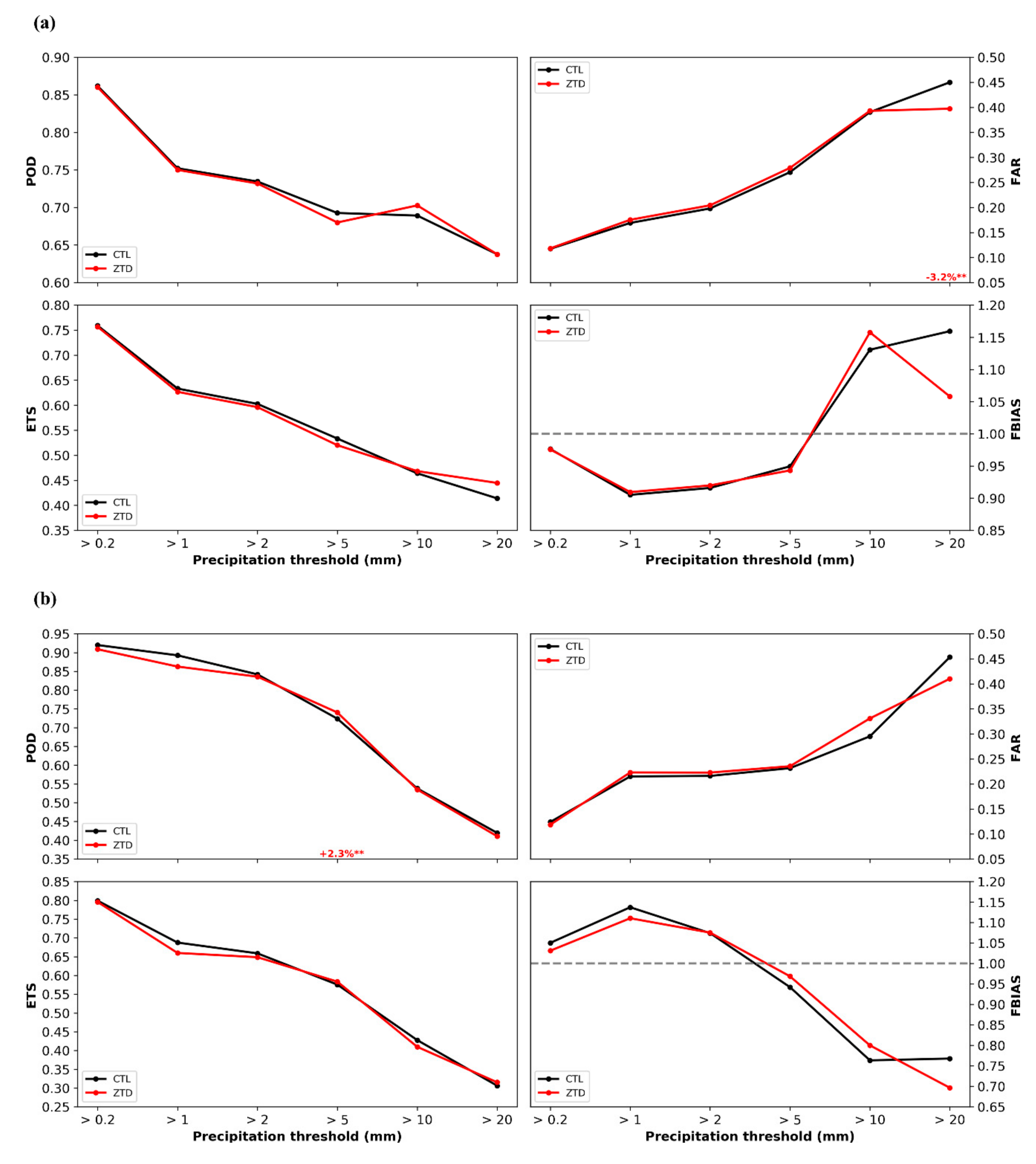
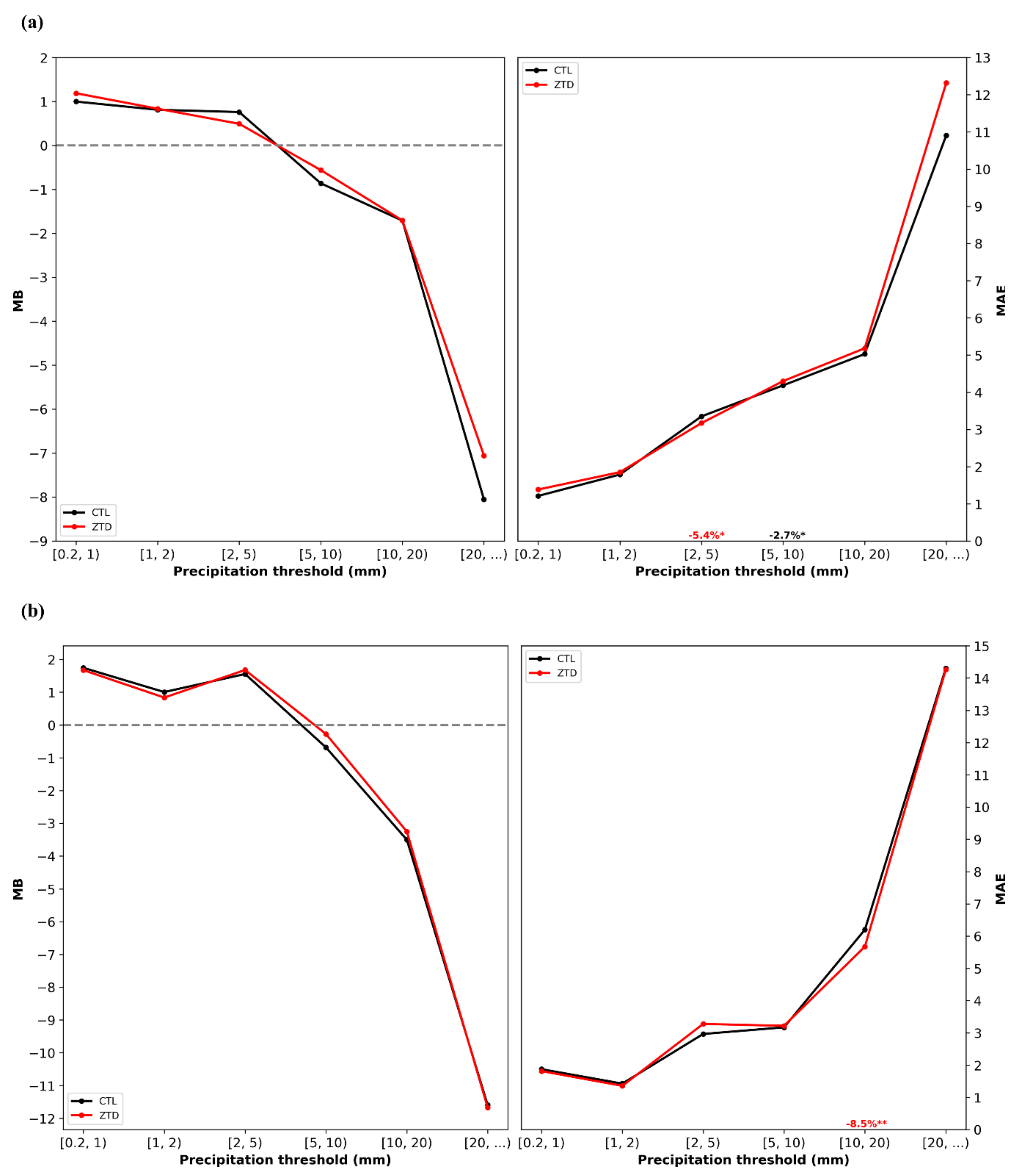
3.1. Statistical Evaluation
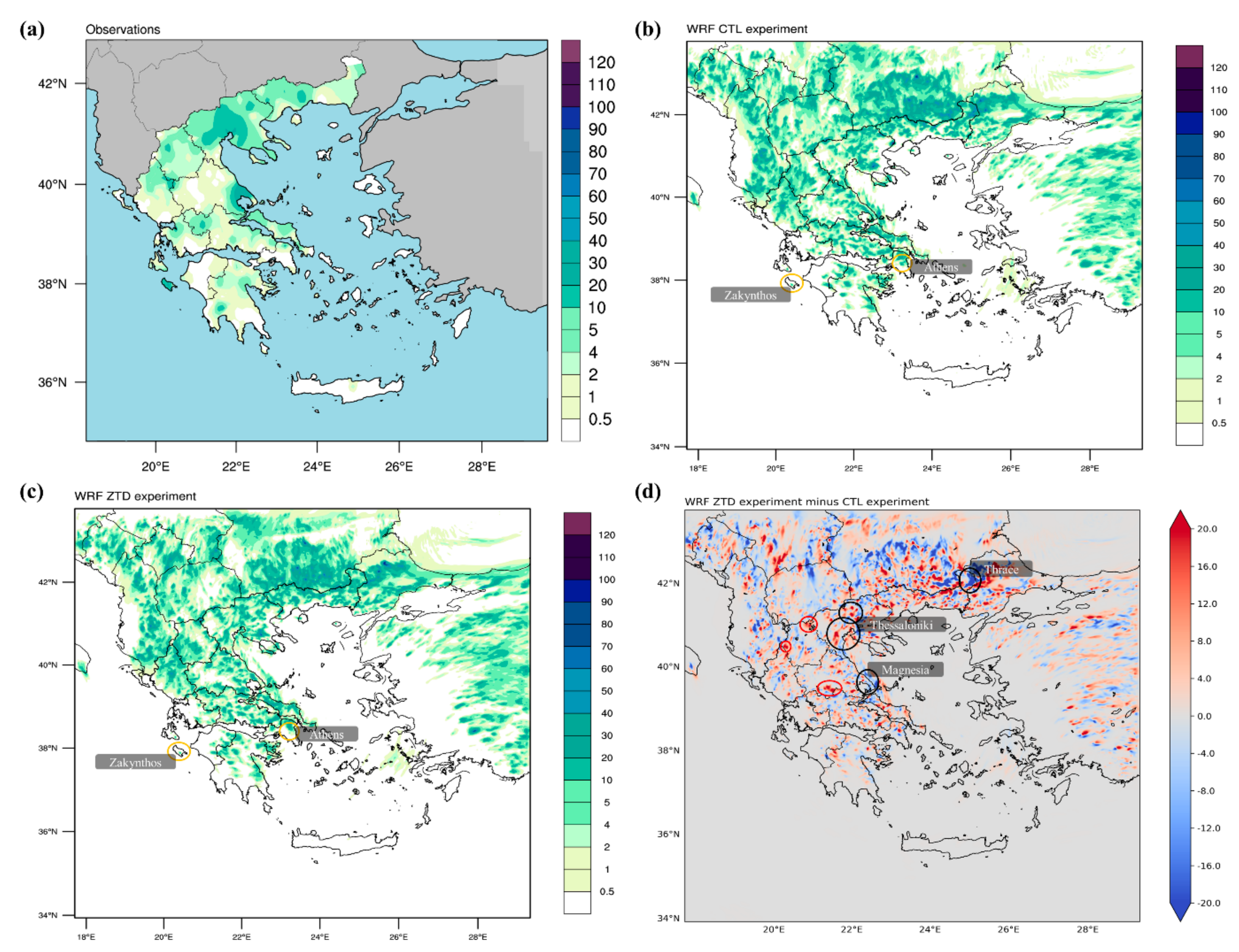
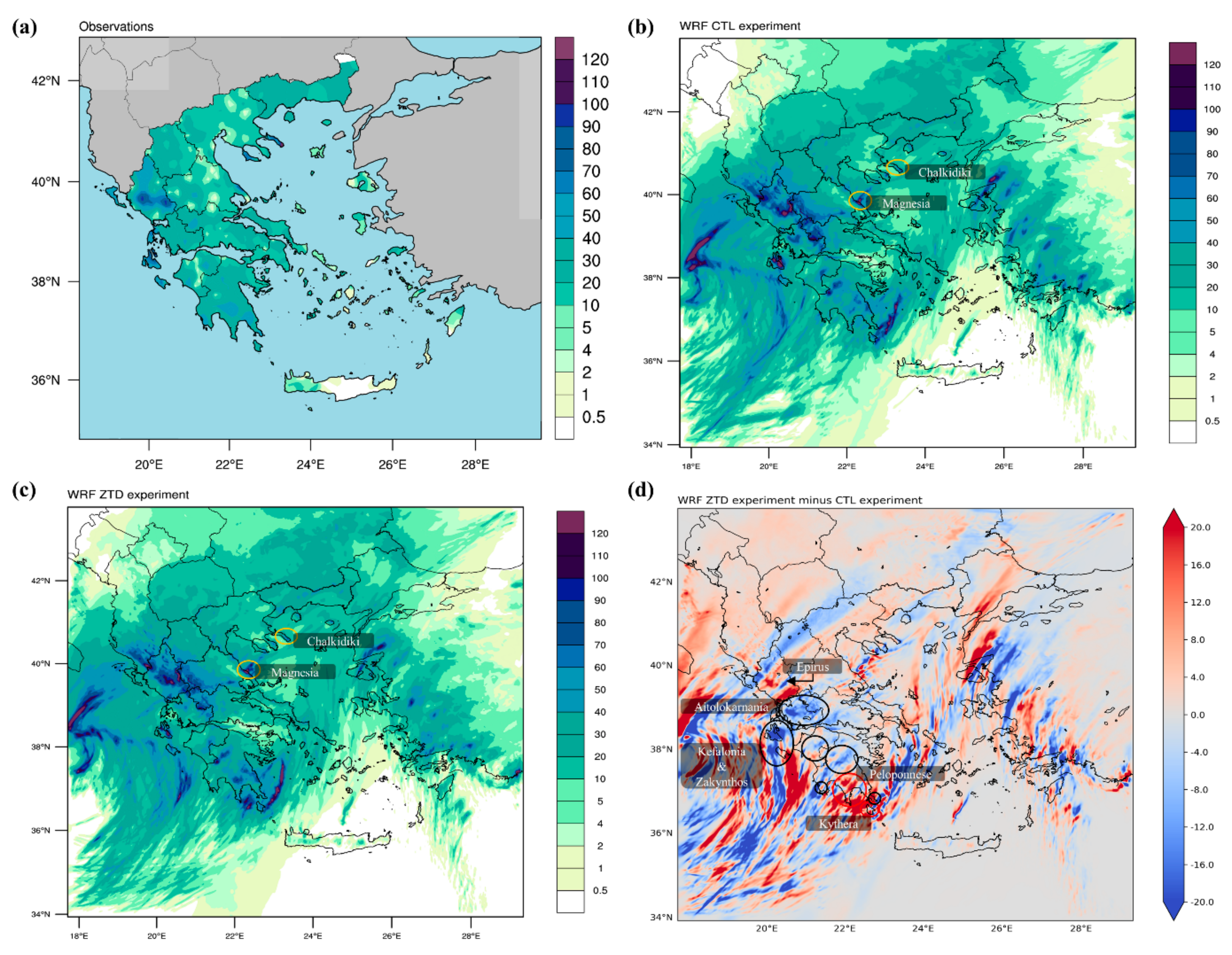
3.3.1. Daily Precipitation
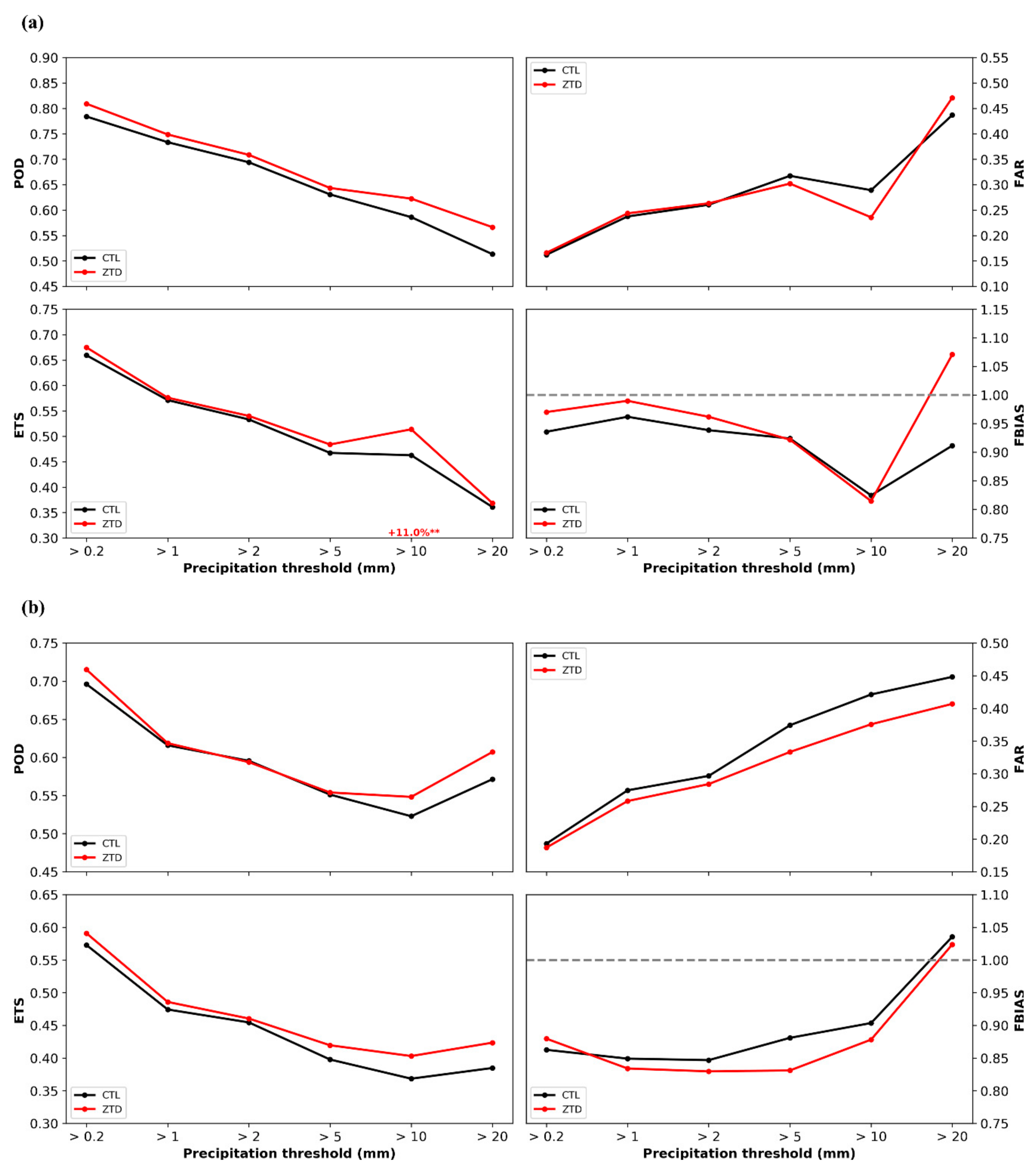
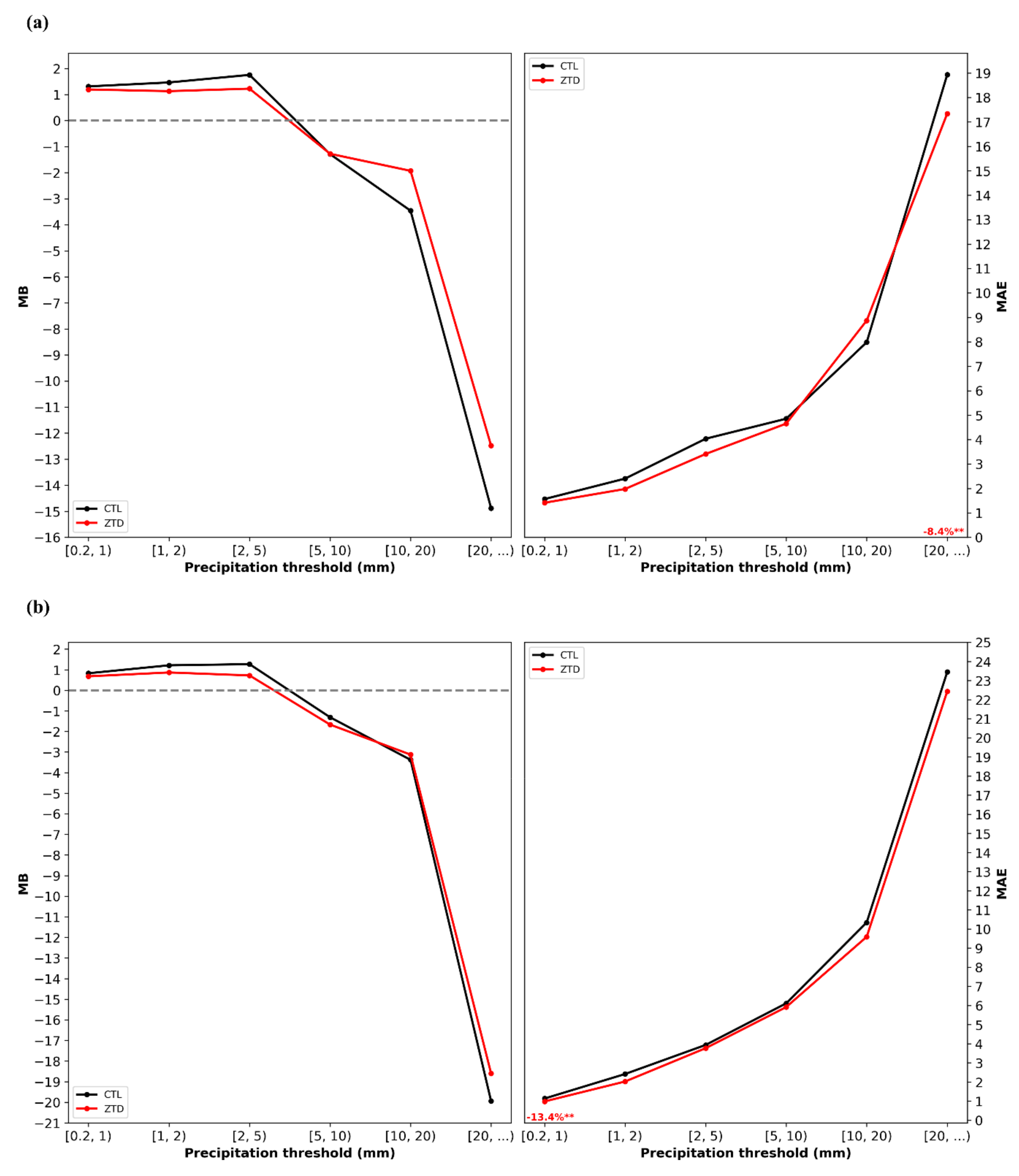
3.3.2. 6 h Accumulated Precipitation
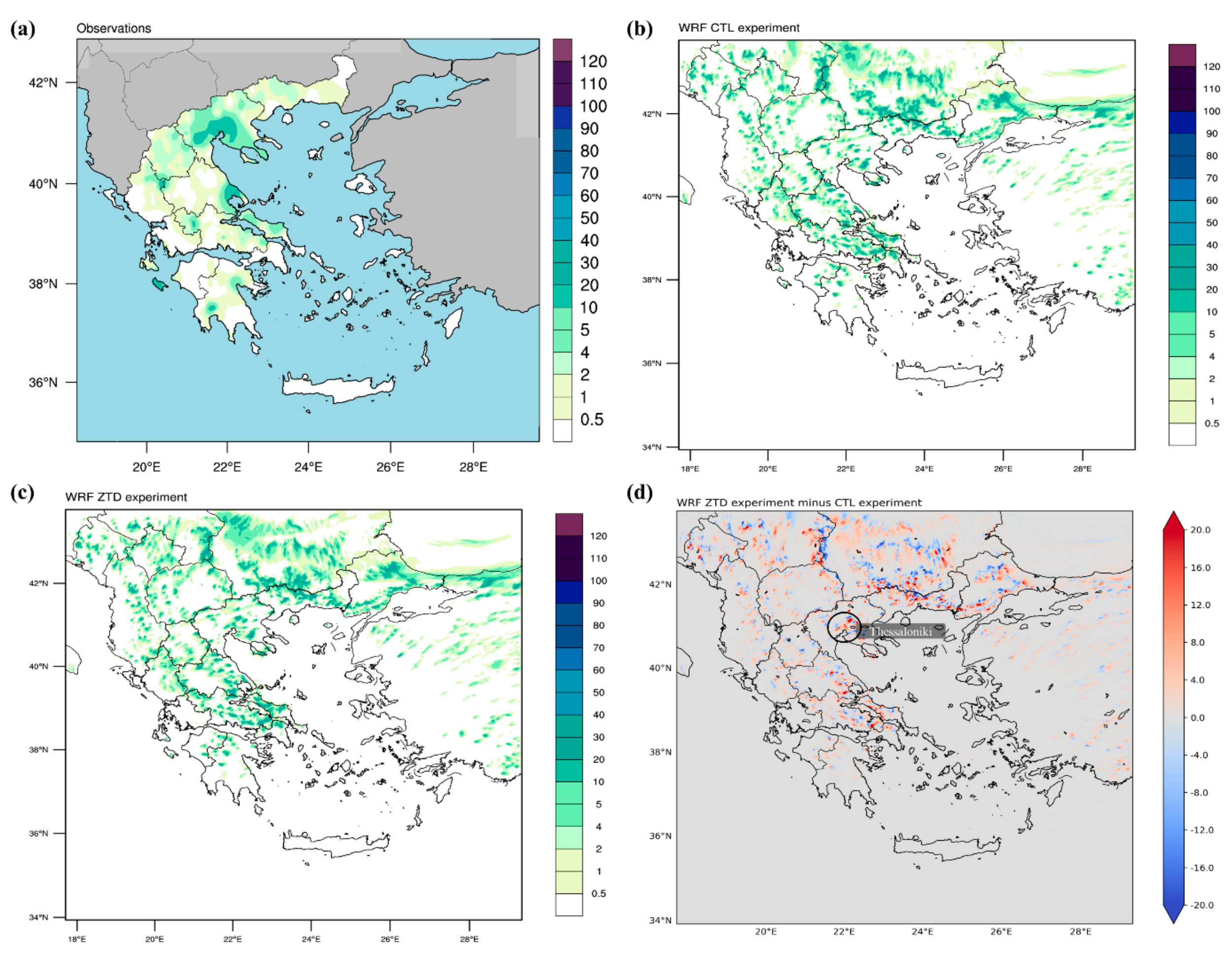
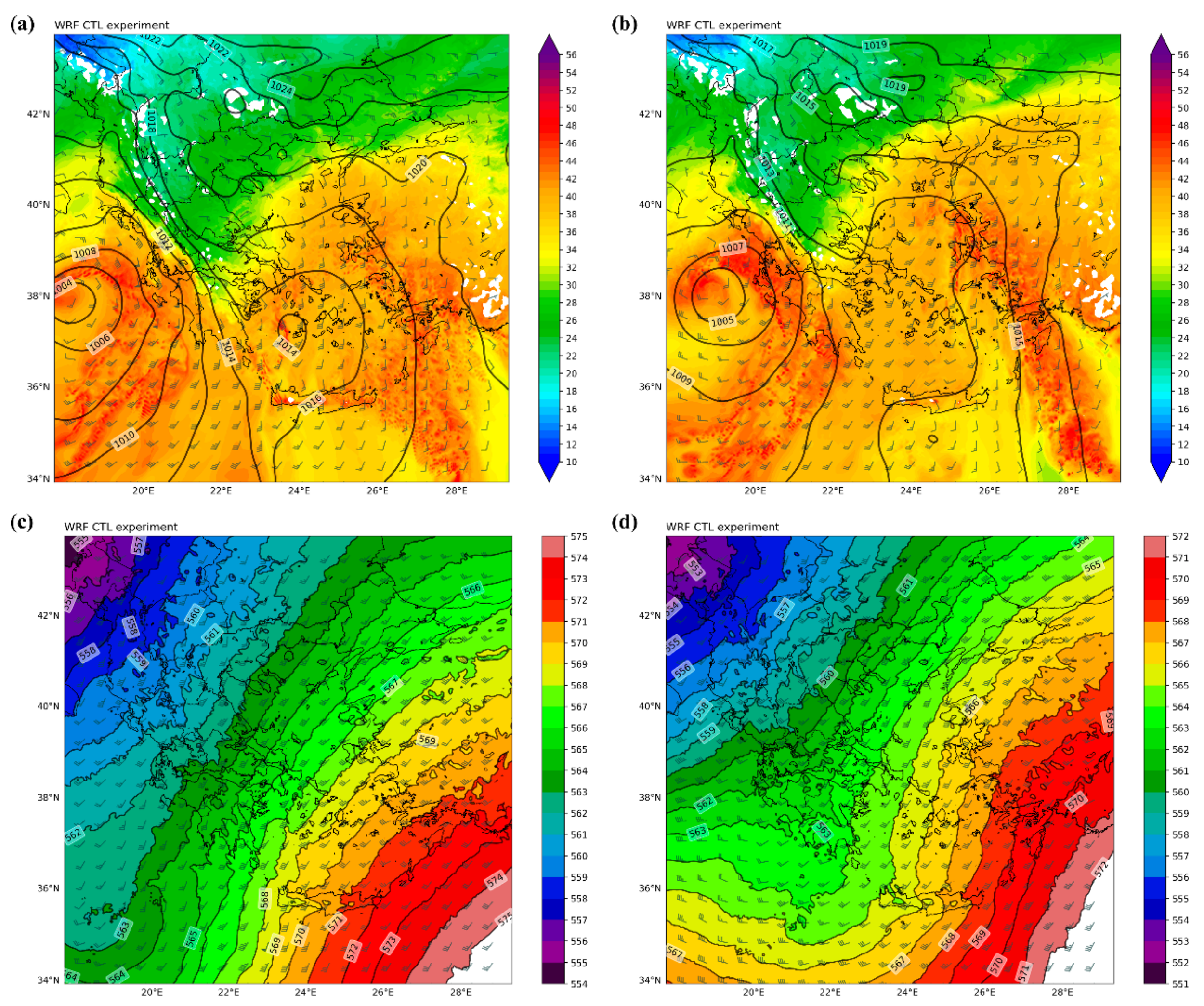
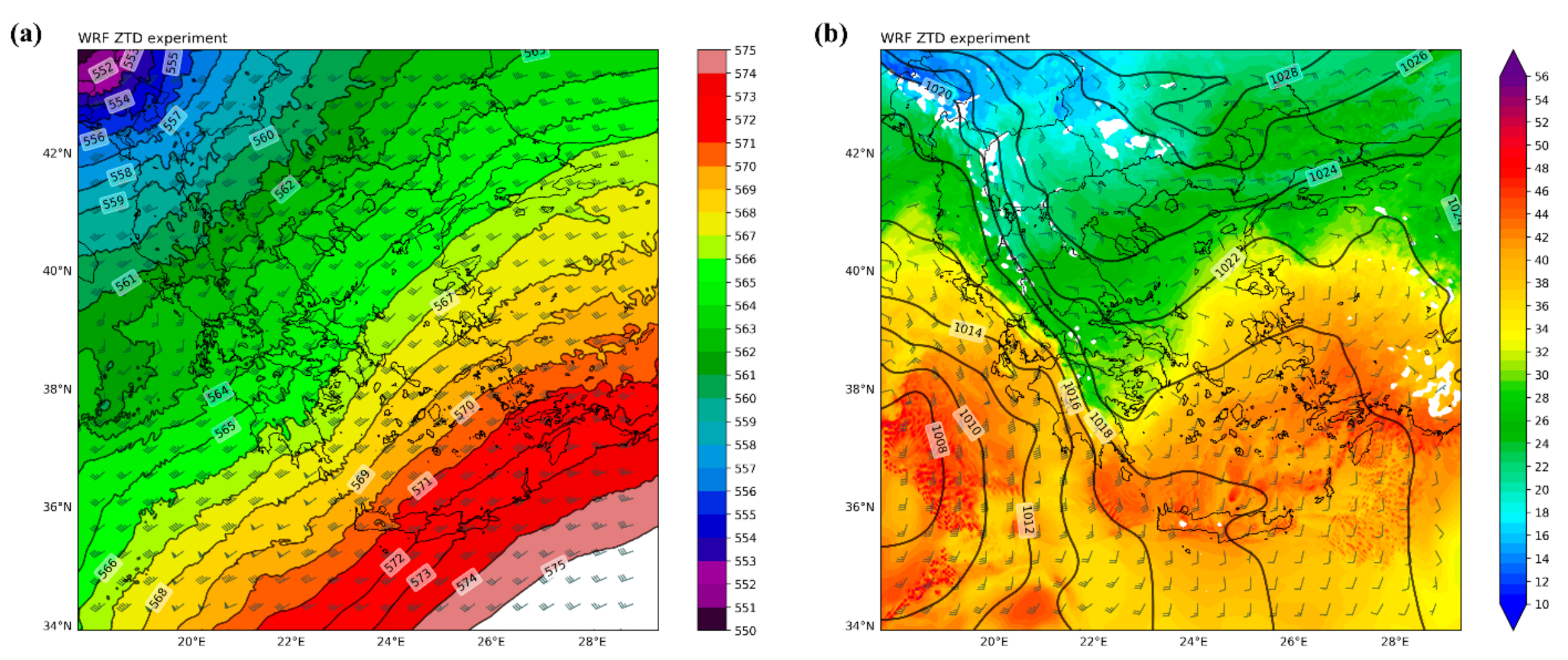
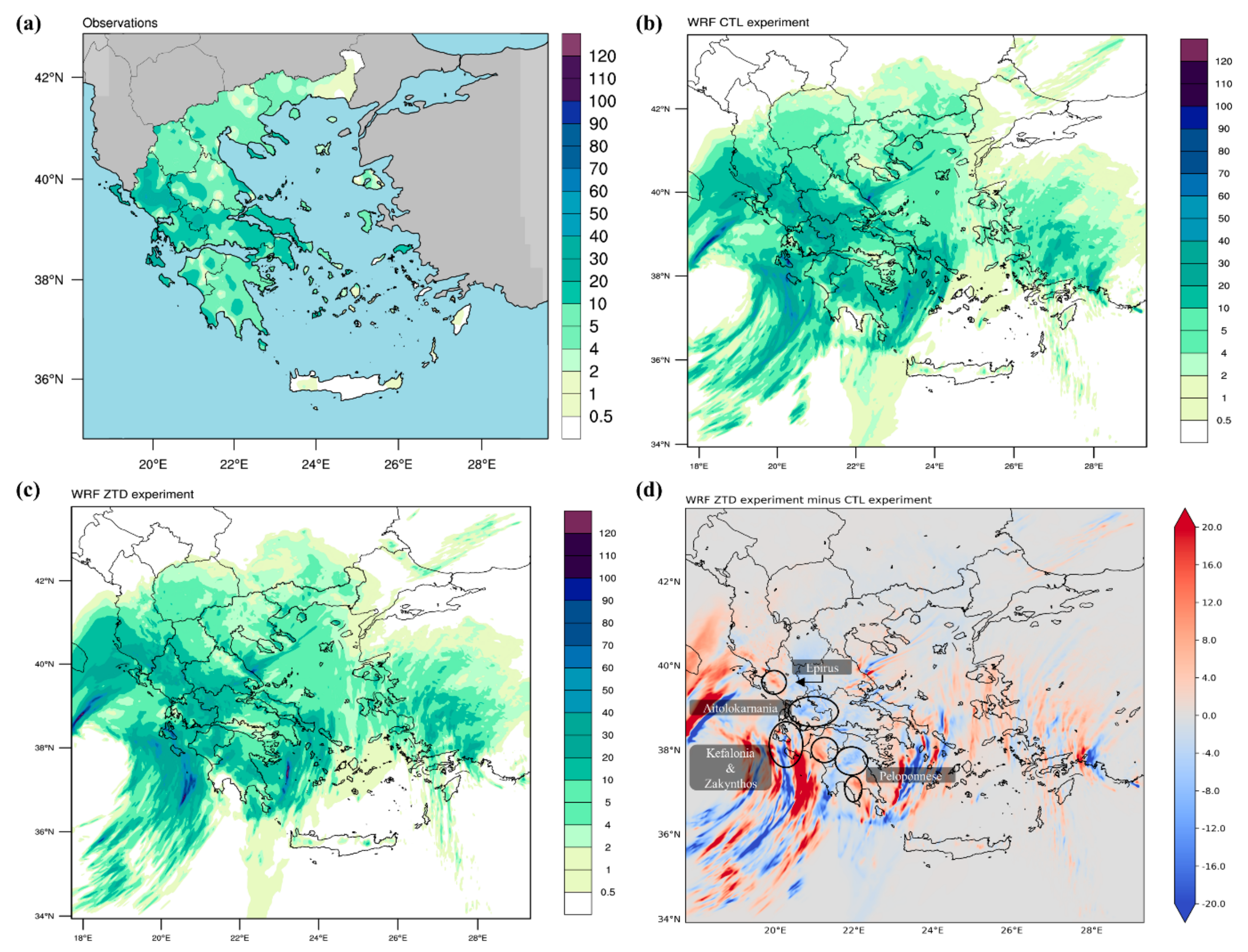
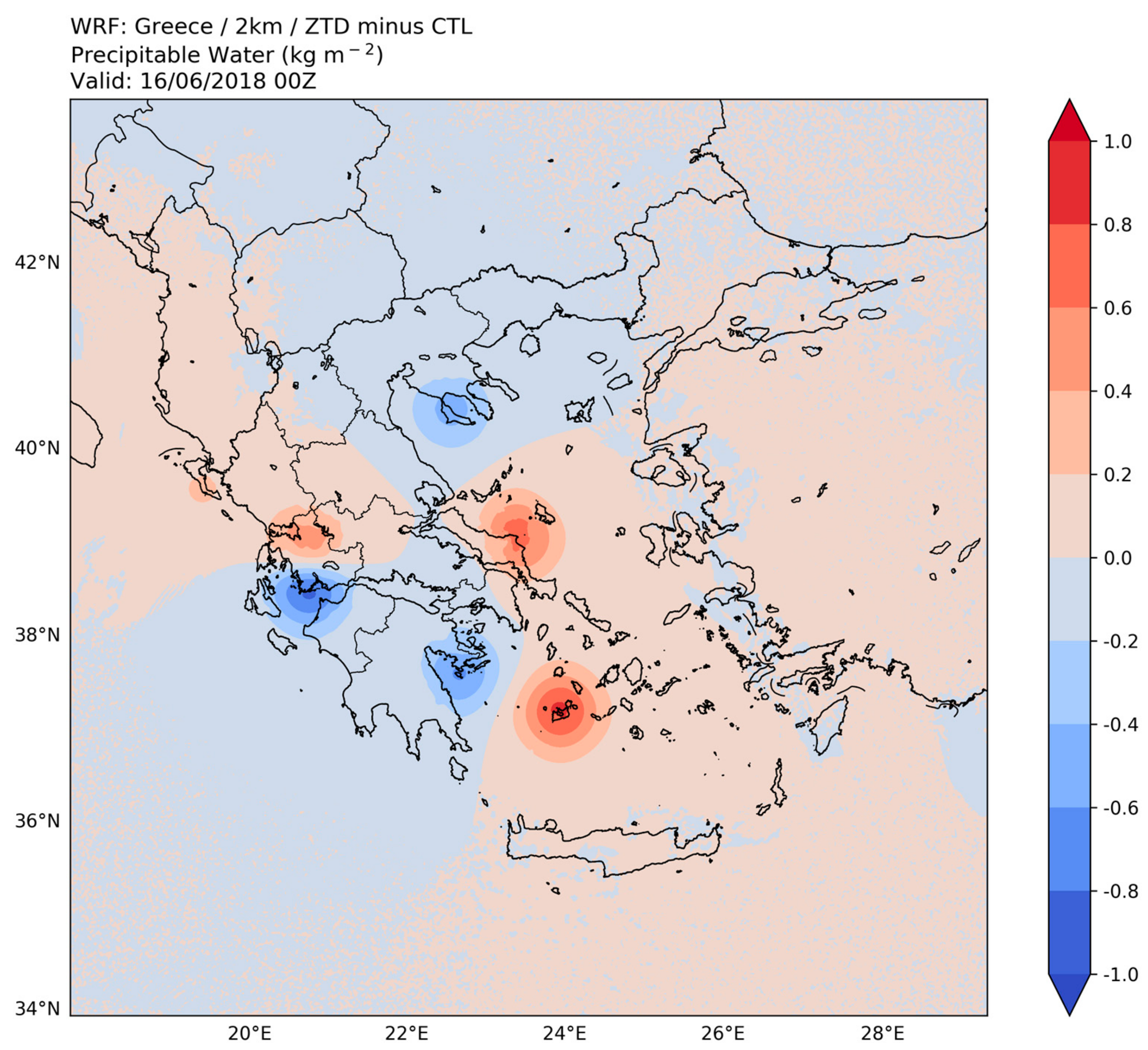
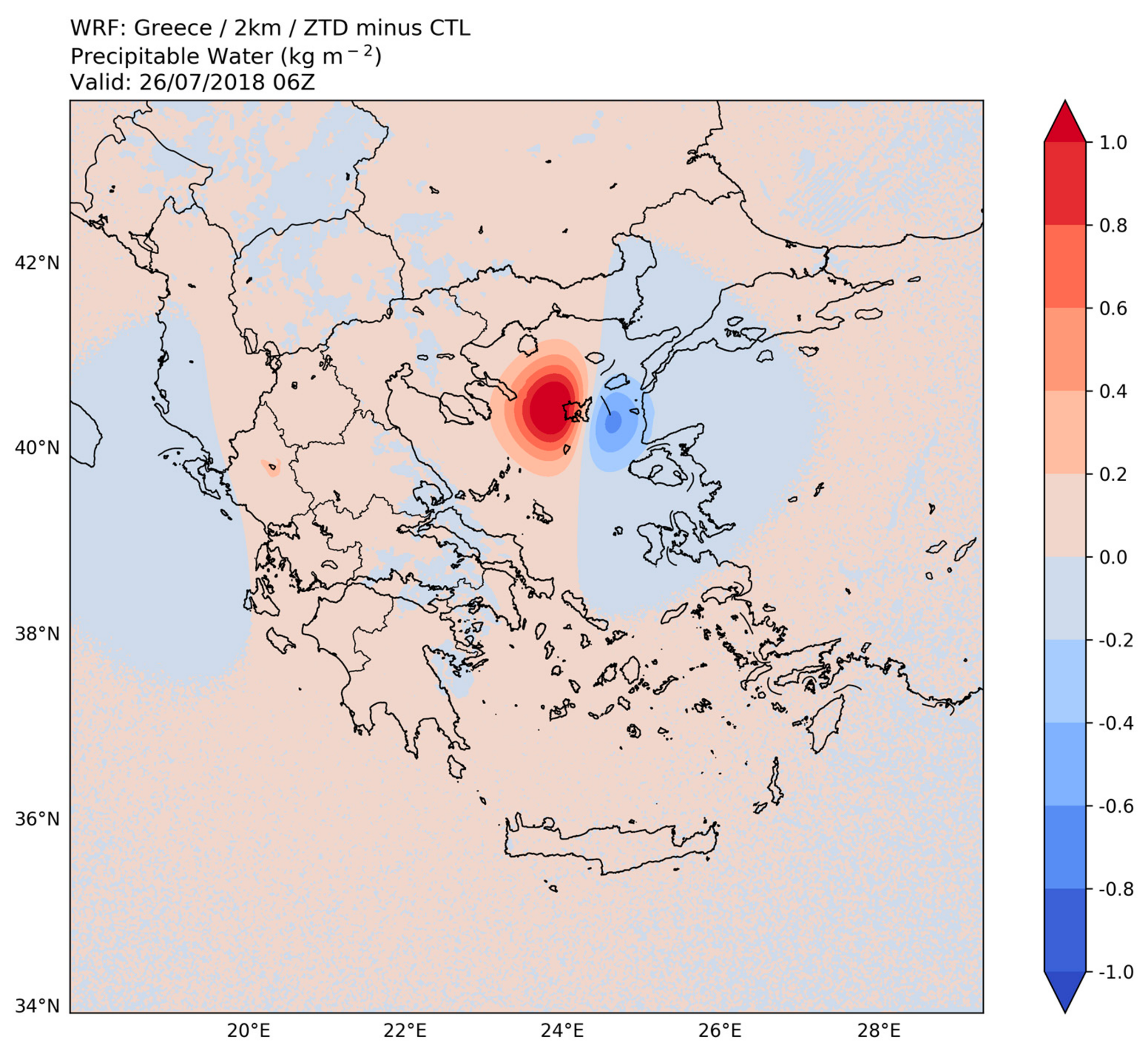
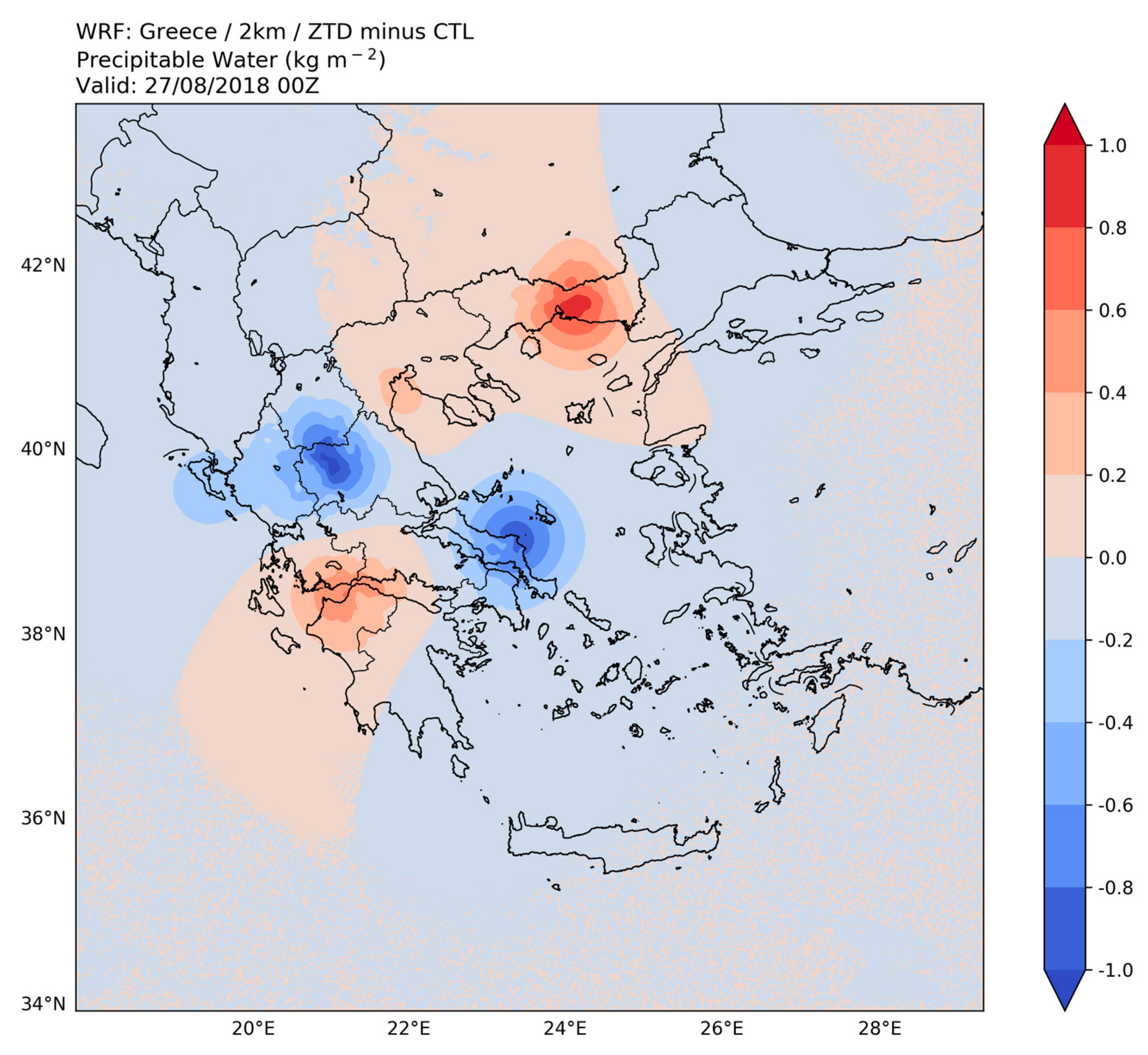
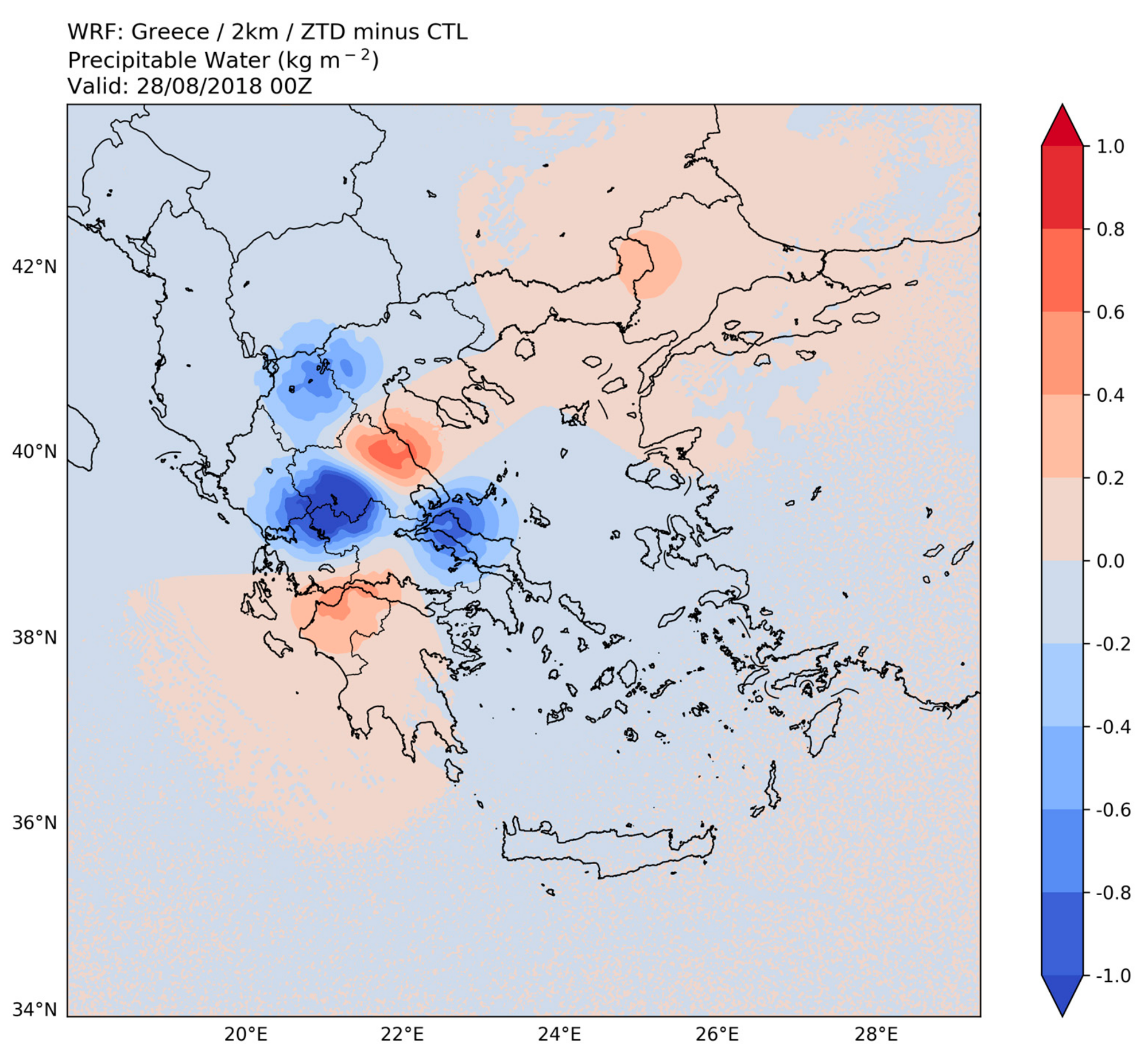
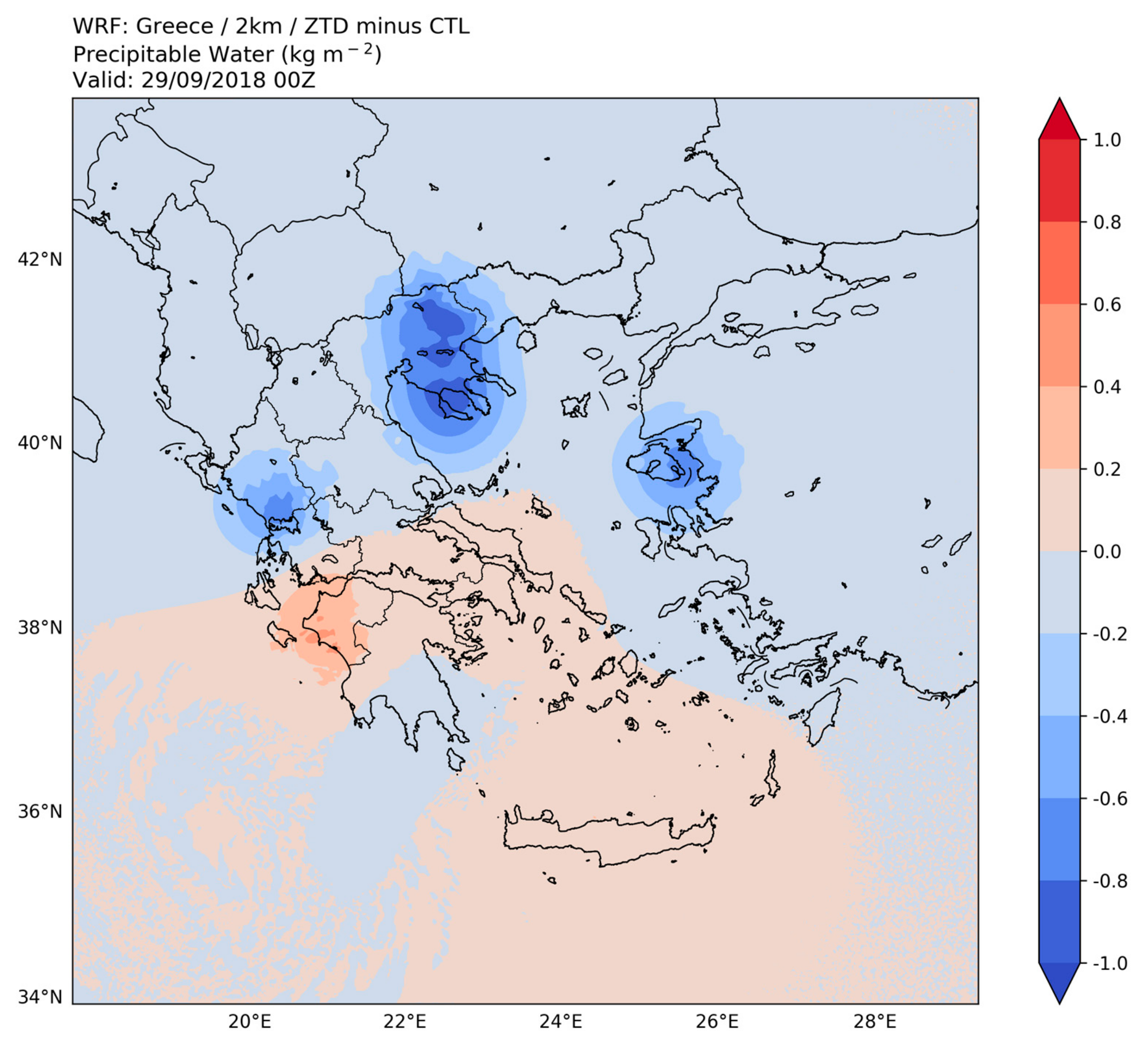
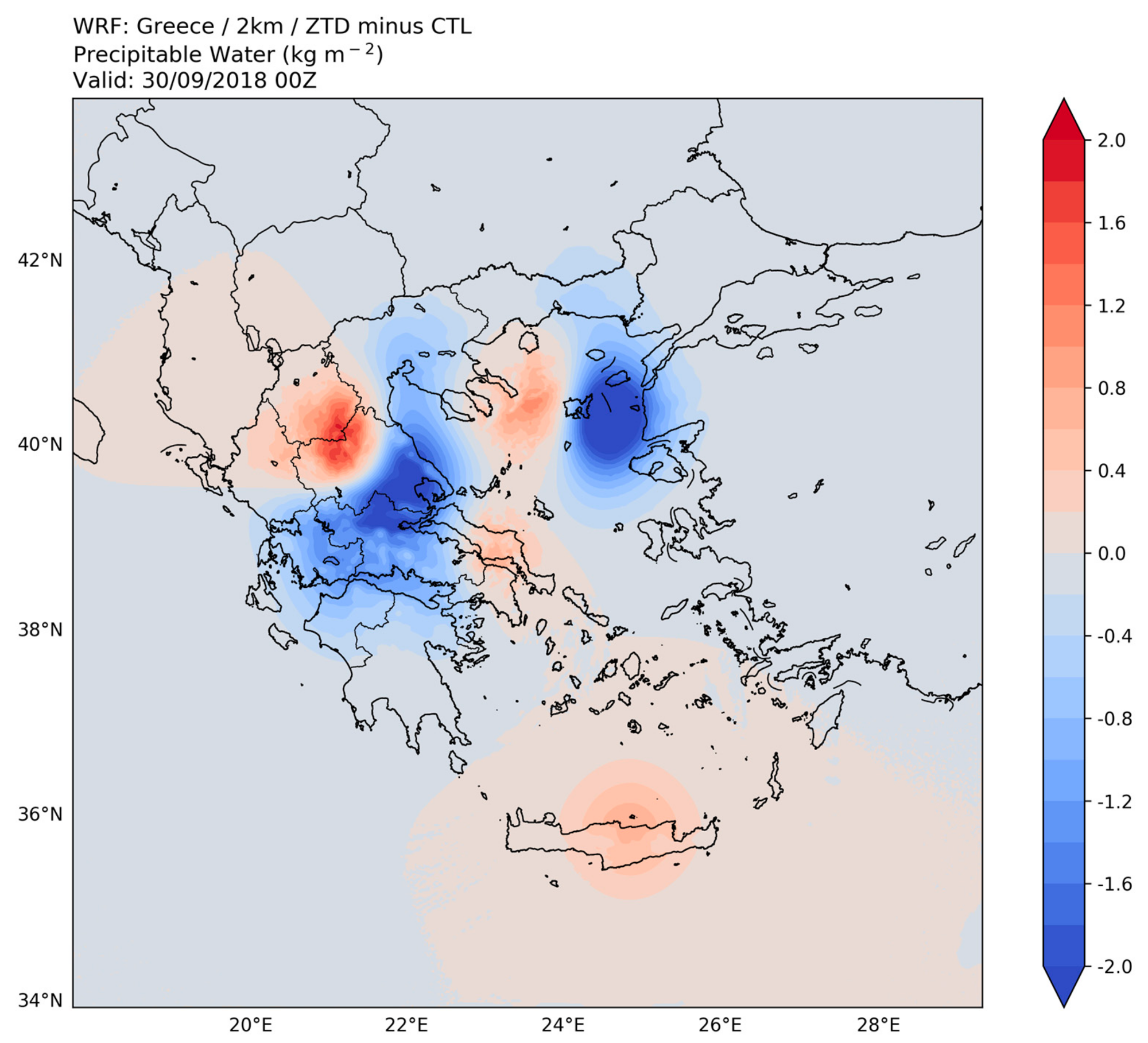
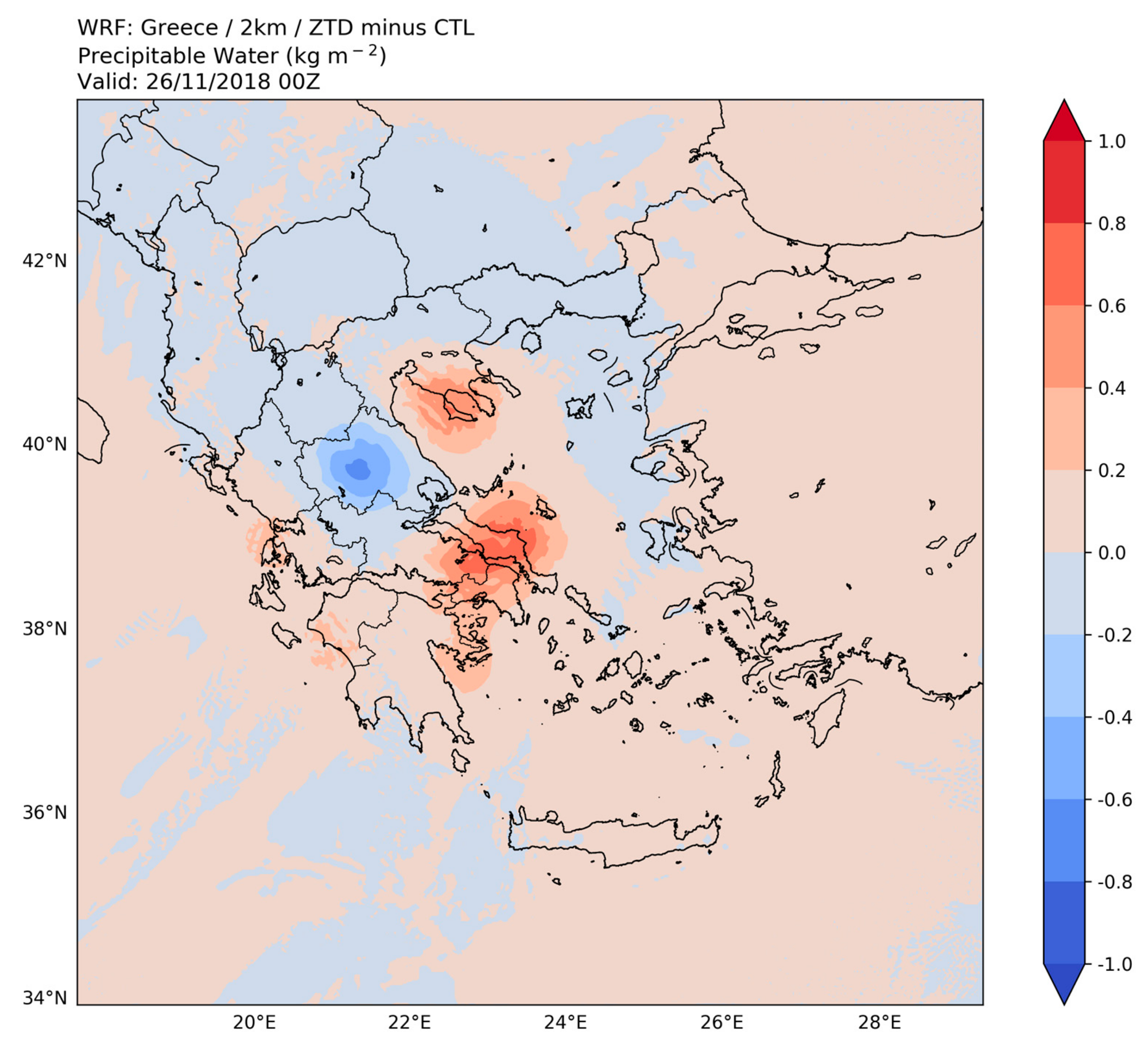
3.2. Analysis of Selected Case Studies
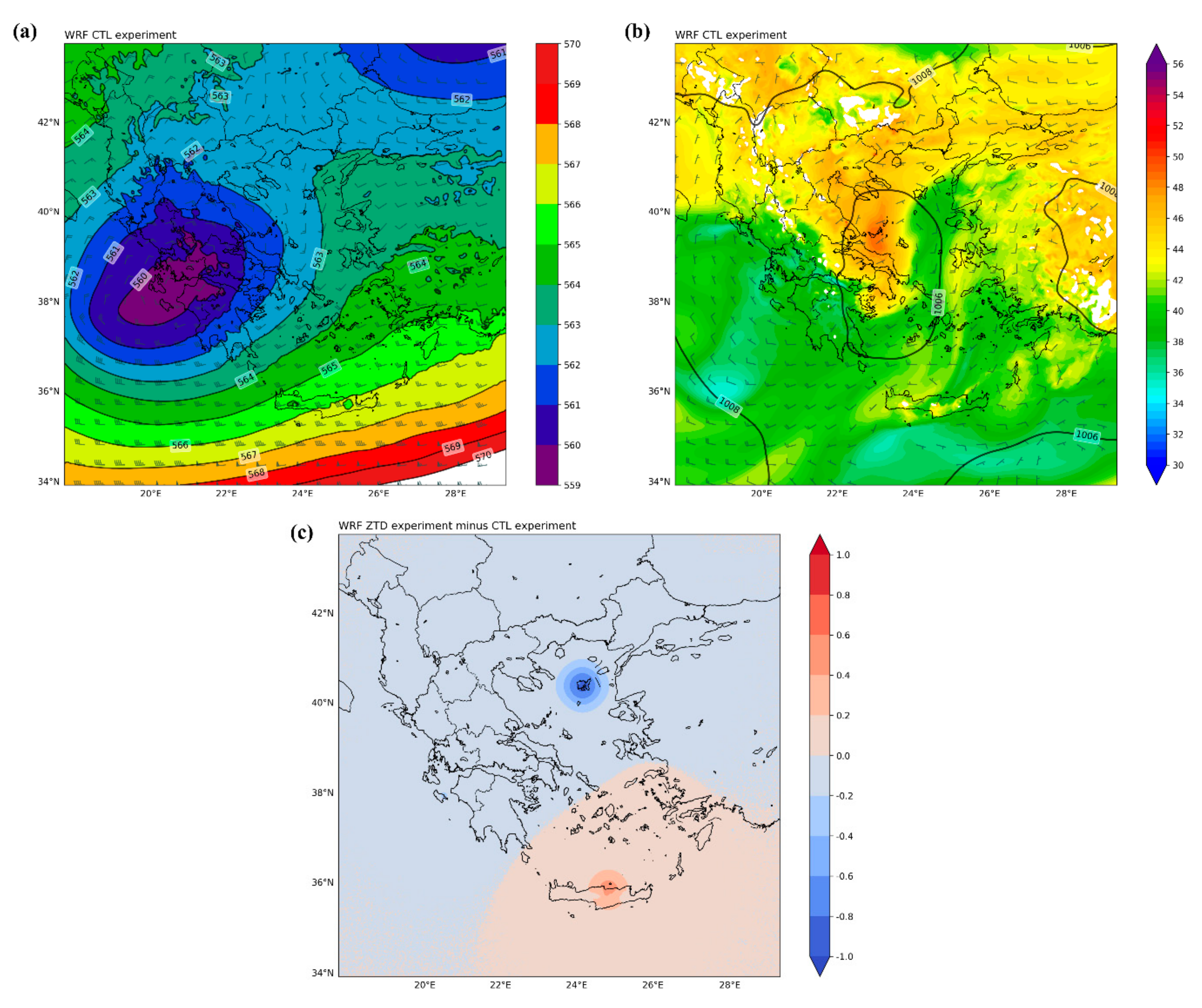
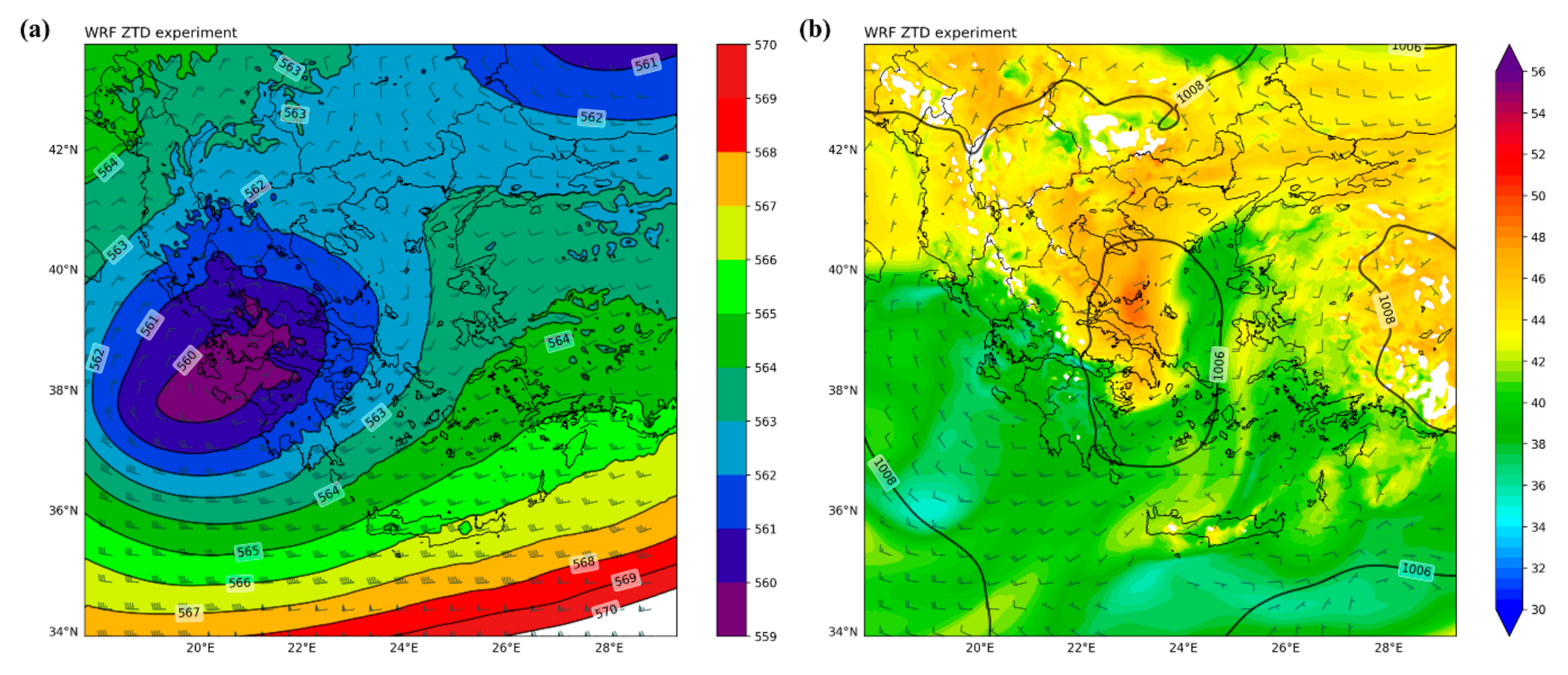
3.2.1. 10 May 2018
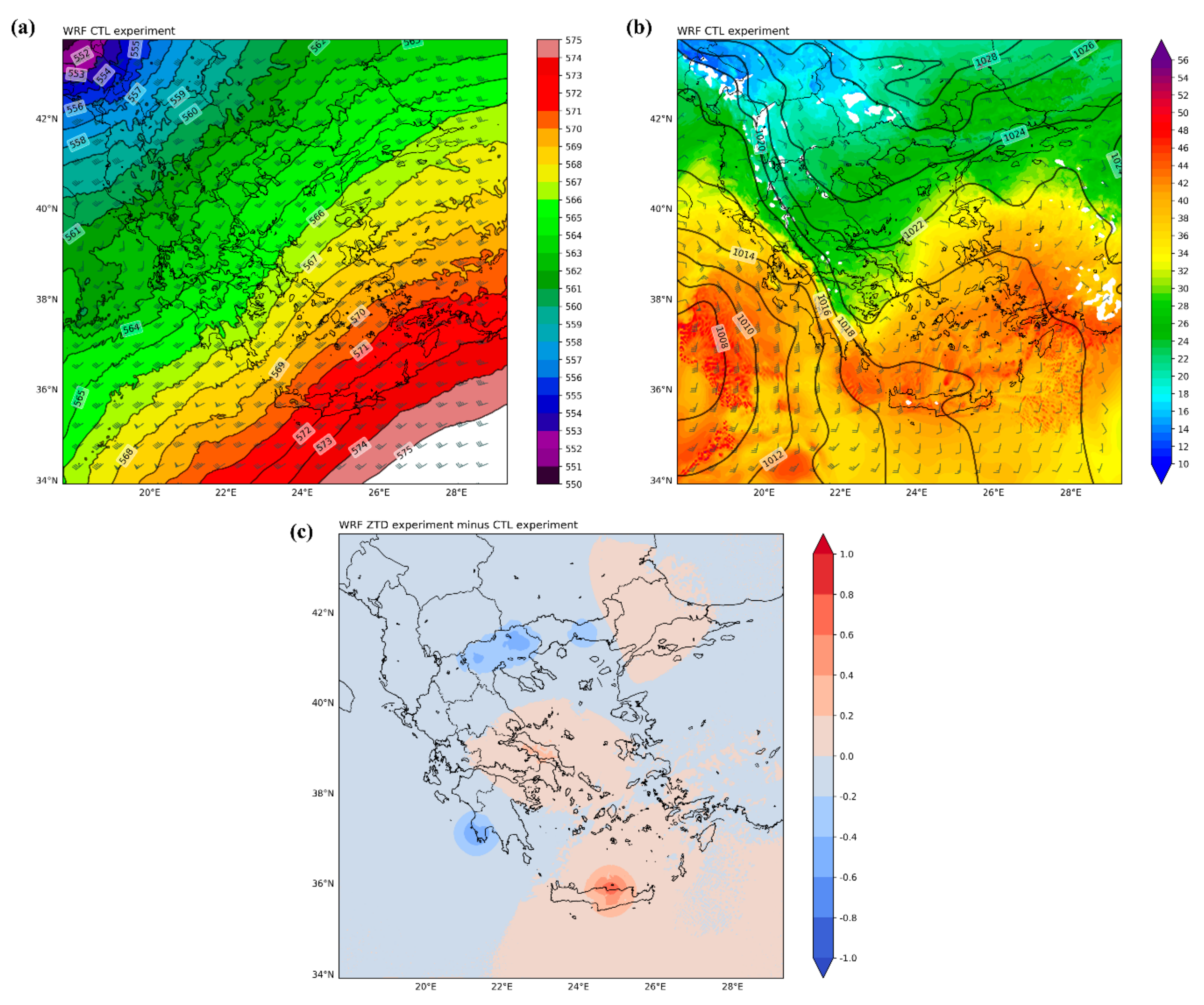
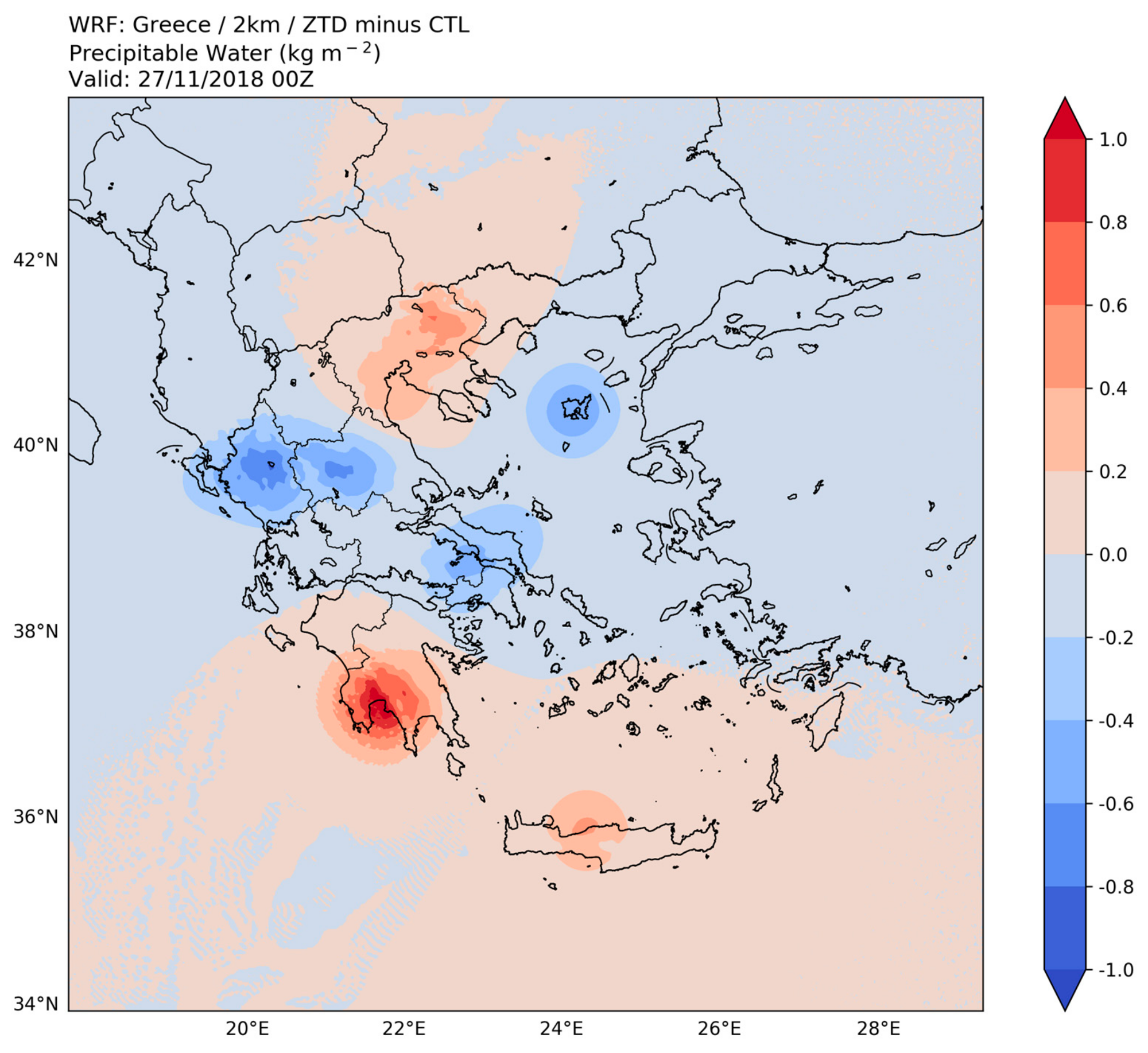
3.2.2. 18 November 2018
4. Discussion
5. Conclusions
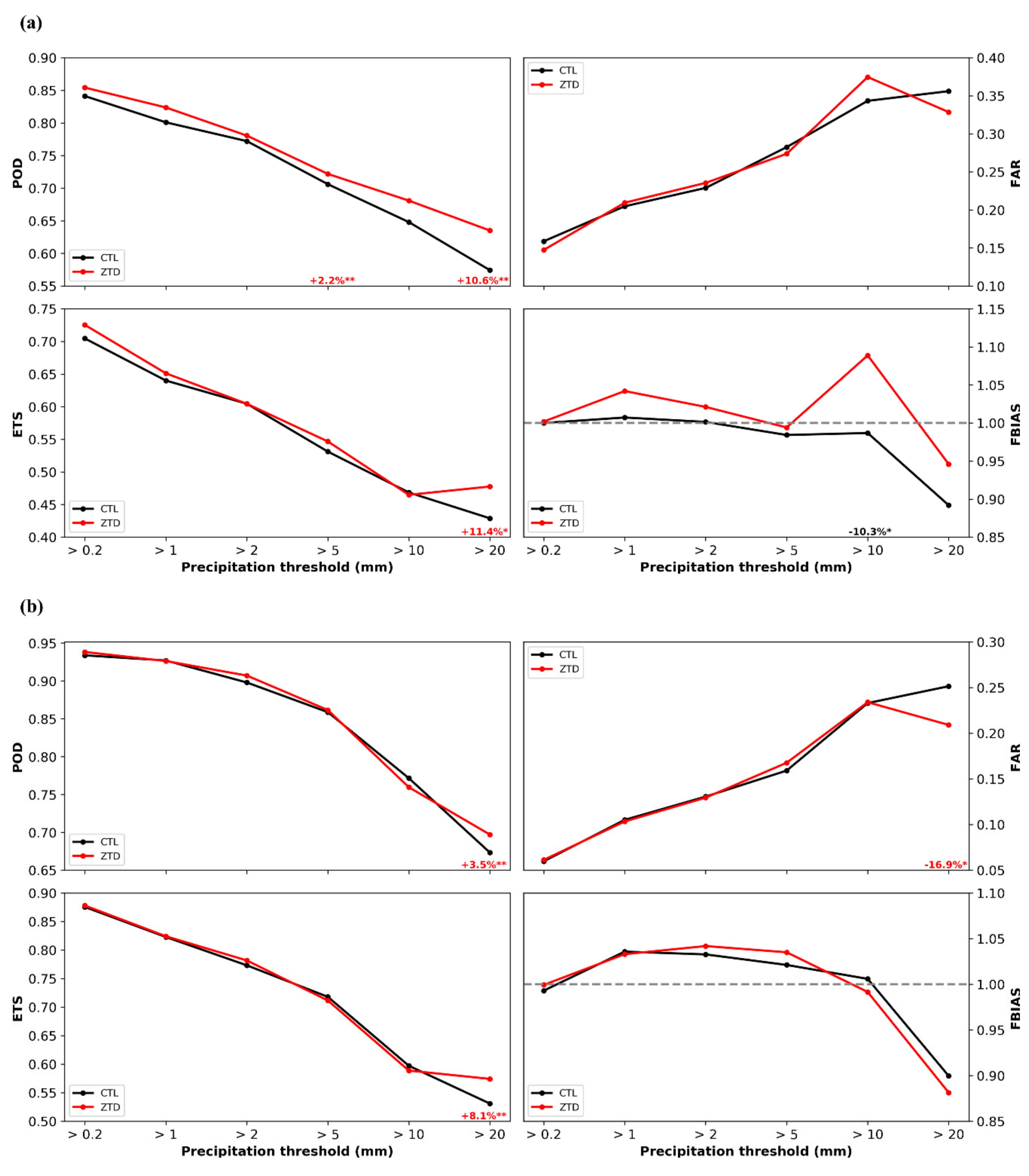
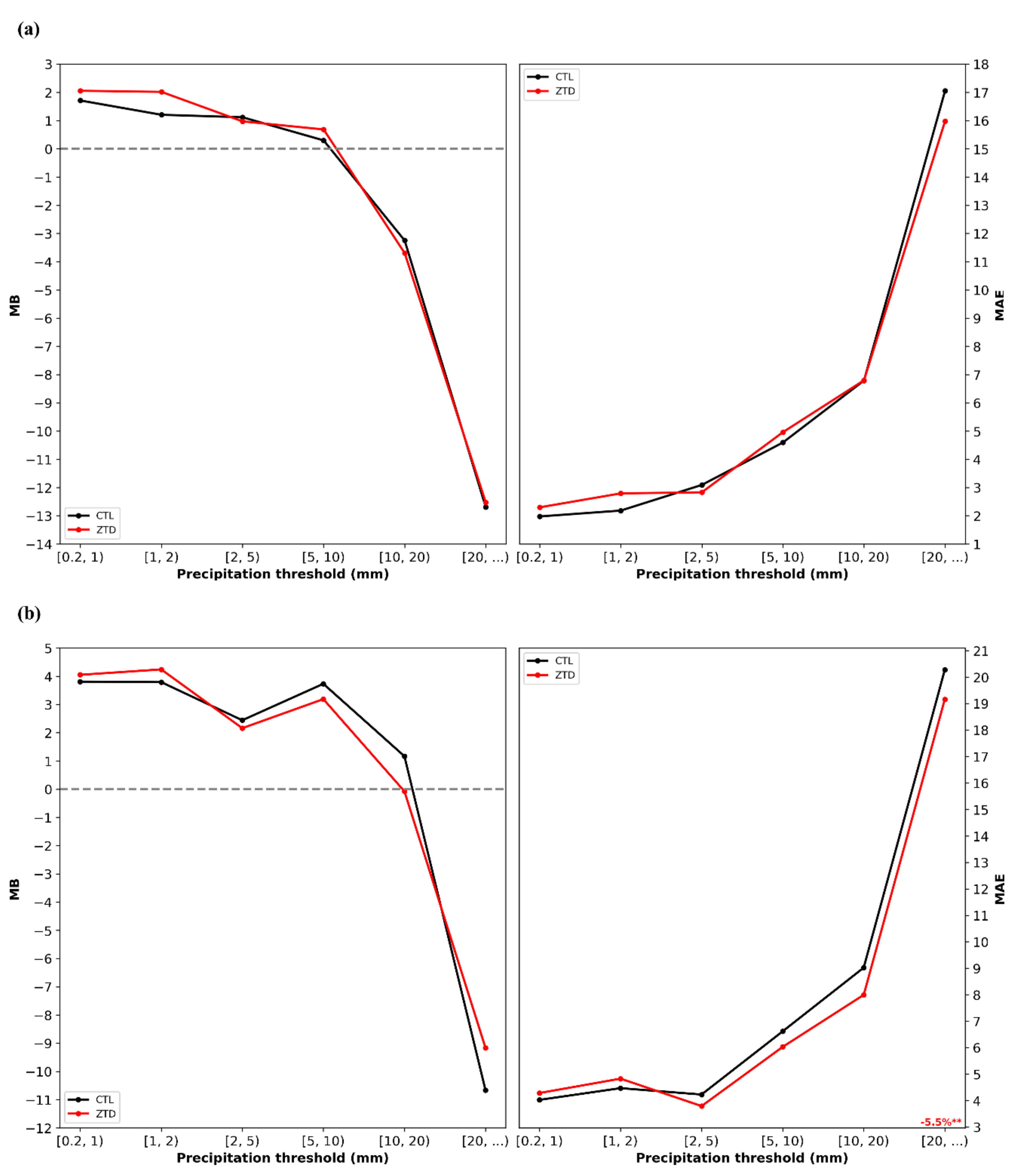
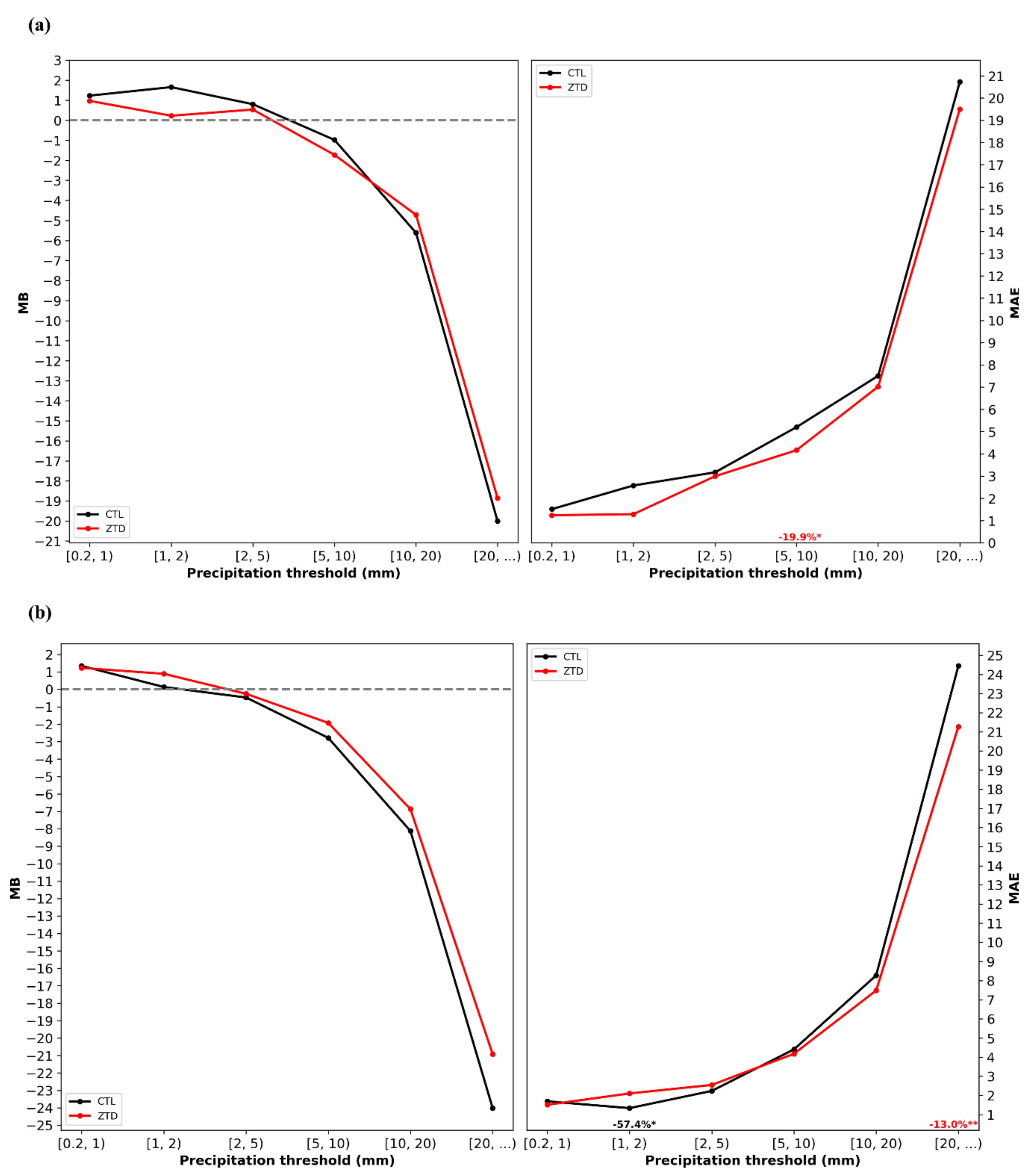
- The ZTD assimilation results into statistically significant (a)more accurate reproduction of the occurrence of the observed precipitation (higher POD by 10.6% and 3.9% in the dry and wet season, respectively), (b) reduction of the false forecasts (lower FAR by 7.7% and 16.9% in the dry and wet season, respectively), (c) better prediction quality (greater ETS by 11.4% and 8.1% in the dry and wet season, respectively), and (d) decrease in the magnitude of errors (lower MAE by 6.3% and 5.5% in the dry and wet season, respectively), compared to the CTL configuration, for intense rainfall (>20 mm). This outcome is of great importance when considering that heavy precipitation amounts are associated with greater impacts and may be poorly forecasted.
- The overall model performance enhancement in rainfall forecasting during the ZTD experiment is more evident in the dry season. However, the assimilation of ZTDs also leads to notable and statistically significant improvements during the wet period, indicating, in contrast to past studies, that it can provide a positive influence under large-scale synoptic conditions.
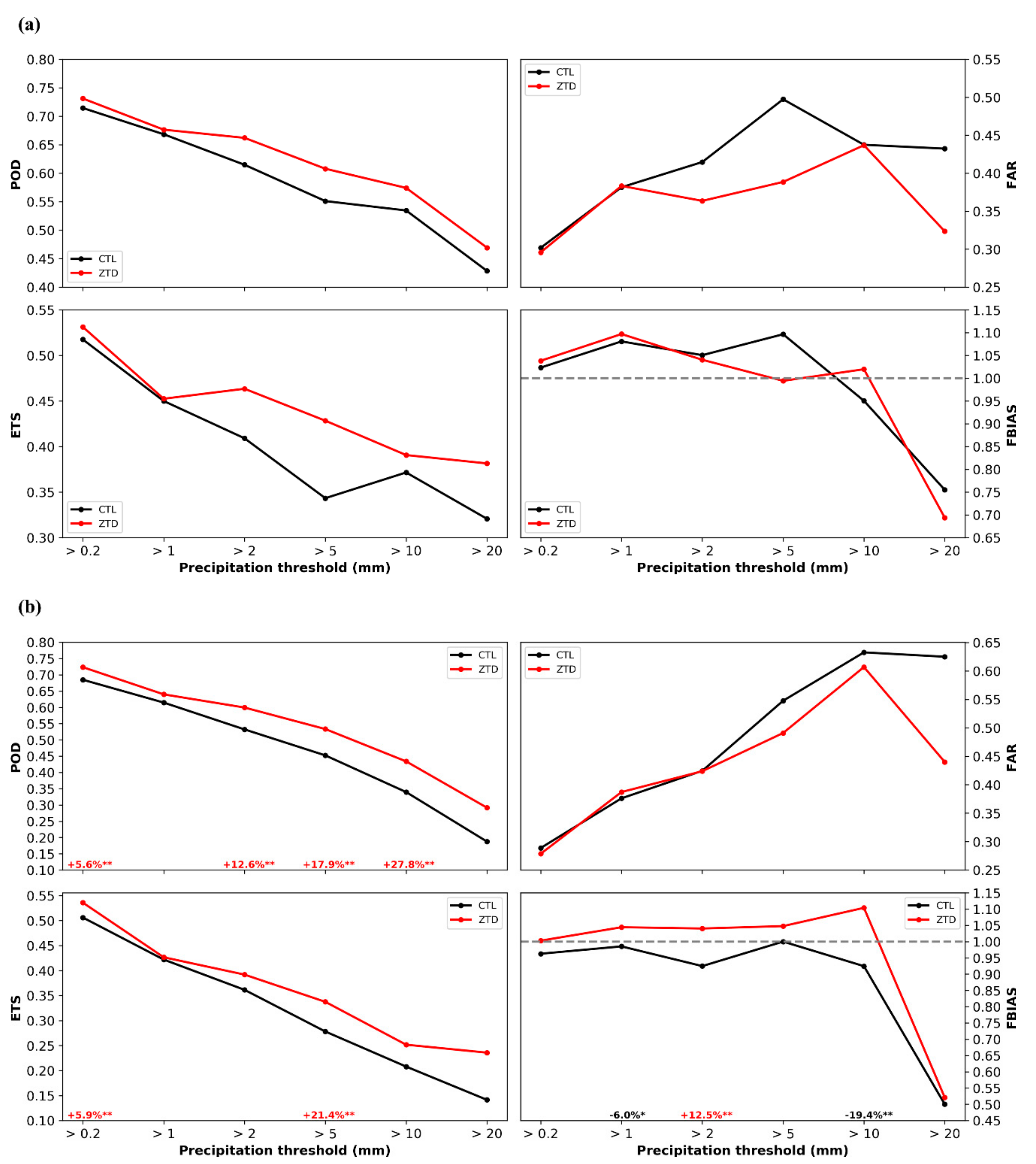
- The introduction of ZTDs into the WRF model induces statistically significant improvements in precipitation forecasts, especially for above 20 mm 6 h accumulations, during the time window (0600 to 1800 UTC) of convective rain occurrence in the dry season. This finding is essential as correctly forecasting high precipitation convective events during the dry period is crucial in issuing improved severe rainfall warnings.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A













References
- Sabatini, R.; Moore, T.; Ramasamy, S. Global navigation satellite systems performance analysis and augmentation strategies in aviation. Prog. Aerosp. Sci. 2017, 95, 45–98. [Google Scholar] [CrossRef]
- Kubo, N.; Higuchi, M.; Takasu, T.; Yamamoto, H. Performance evaluation of GNSS-based railway applications. In Proceedings of the 2015 International Association of Institutes of Navigation World Congress (IAIN), Prague, Czech Republic, 20–23 October 2015; pp. 1–8. [Google Scholar]
- Molina, P.; Colomina, I.; Vitoria, T.; Silva, P.F.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Searching Lost People with Uavs: The System and Results of the Close-Search Project. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Kahveci, M. Contribution of GNSS in precision agriculture. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 19–22 June 2017; pp. 513–516. [Google Scholar]
- Ostolaza, J.; Lera, J.J.; Pérez, D.; Cueto-Felgueroso, G.; Cueto, M.; Cezón, A.; Fernández, M.A.; López, M.; Hill, D.; Boissinot, V.; et al. Maritime Trials in Europe and Africa Using GNSS-based Enhanced Systems. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, OR, USA, 12–16 September 2016. [Google Scholar]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; De Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 2012, 97, 15787. [Google Scholar] [CrossRef]
- Suparta, W.; Adnan, J.; Mohd Ali, M.A. Nowcasting the lightning activity in Peninsular Malaysia using the GPS PWV during the 2009 inter-monsoons. Ann. Geophys. 2014, 57, 0217. [Google Scholar]
- Dousa, J.; Vaclavovic, P. Real-time zenith tropospheric delays in support of numerical weather prediction applications. Adv. Space Res. 2014, 53, 1347–1358. [Google Scholar] [CrossRef]
- Hanna, N.; Trzcina, E.; Möller, G.; Rohm, W.; Weber, R. Assimilation of GNSS tomography products into WRF using radio occultation data assimilation operator. Atmos. Meas. Tech. Discuss. 2019, 12, 4829–4848. [Google Scholar] [CrossRef]
- Simeonov, T.; Sidorov, D.; Teferle, F.N.; Milev, G.; Guerova, G. Evaluation of IWV from the numerical weather prediction WRF model with PPP GNSS processing for Bulgaria. Atmos. Meas. Tech. Discuss. 2016. [Google Scholar] [CrossRef] [Green Version]
- Manning, T.; Zhang, K.; Rohm, W.; Choy, S. Detecting Severe Weather using GPS Tomography: An Australian Case Study. J. Glob. Position. Syst. 2012, 11, 58–70. [Google Scholar] [CrossRef]
- Pikridas, C. Monitoring Climate Changes on Small Scale Networks Using Ground Based GPS and Meteorological Data. Artif. Satell. 2014, 49, 125–135. [Google Scholar] [CrossRef] [Green Version]
- Pikridas, C. The use of GNSS tropospheric products for climate monitoring. A case study in the area of Ioannina Northwestern Greece. South East. Eur. J. Earth Obs. Geomat. 2015, 4, 81–90. [Google Scholar]
- Pikridas, C.; Fotiou, A.; Bitharis, S.; Karolos, I.; Balidakis, K. BeRTISS: Balkan-Mediterranean real time severe weather service. The case of Greece. In Proceedings of the 5th International Conference on Civil Protection & New Technologies, Kozani, Greece, 31 October–3 November 2018. [Google Scholar]
- Arriola, J.S.; Lindskog, M.; Thorsteinsson, S.; Bojarova, J. Variational bias correction of GNSS ZTD in the HARMONIE modeling system. J. Appl. Meteorol. Climatol. 2016, 55, 1259–1276. [Google Scholar] [CrossRef]
- E-GVAP. Available online: http://egvap.dmi.dk/ (accessed on 24 January 2019).
- Poli, P.; Moll, P.; Rabier, F.; Desrozier, G.; Chapnik, B.; Berre, L.; Healy, S.B.; Andersson, E.; El Guelai, F.Z. Forecast impact studies of zenith total delay data from European near real-time GPS stations in Météo France 4DVAR. J. Geophys. Res. Atmos. 2007, 112, 47. [Google Scholar] [CrossRef]
- Yan, X.; Ducrocq, V.; Jaubert, G.; Brousseau, P.; Poli, P.; Champollion, C.; Flamant, C.; Boniface, K. The benefit of GPS zenith delay assimilation to high-resolution quantitative precipitation forecasts: A case-study from COPS IOP 9. Q. J. R. Meteorol. Soc. 2009, 135, 1788–1800. [Google Scholar] [CrossRef]
- Yan, X.; Ducrocq, V.; Poli, P.; Hakam, M.; Jaubert, G.; Walpersdorf, A. Impact of GPS zenith delay assimilation on convective-scale prediction of Mediterranean heavy rainfall. J. Geophys. Res. Atmos. 2009, 114, 20. [Google Scholar] [CrossRef] [Green Version]
- Eresmaa, R.; Salonen, K.; Järvinen, H. An observing-system experiment with ground-based GPS zenith total delay data using HIRLAM 3D-Var in the absence of satellite data. Q. J. R. Meteorol. Soc. 2010, 136, 1289–1300. [Google Scholar] [CrossRef]
- Bennitt, G.V.; Jupp, A. Operational Assimilation of GPS Zenith Total Delay Observations into the Met Office Numerical Weather Prediction Models. Mon. Weather Rev. 2012, 140, 2706–2719. [Google Scholar] [CrossRef]
- Schwitalla, T.; Bauer, H.-S.; Wulfmeyer, V.; Aoshima, F. High-resolution simulation over central Europe: Assimilation experiments during COPS IOP 9c. Q. J. R. Meteorol. Soc. 2011, 137, 156–175. [Google Scholar] [CrossRef]
- Boniface, K.; Ducrocq, V.; Jaubert, G.; Yan, X.; Brousseau, P.; Masson, F.; Champollion, C.; Chéry, J.; Doerflinger, E. Impact of high-resolution data assimilation of GPS zenith delay on Mediterranean heavy rainfall forecasting. Ann. Geophys. 2009, 27, 2739–2753. [Google Scholar] [CrossRef]
- Bennitt, G.V.; Johnson, H.R.; Weston, P.P.; Jones, J.; Pottiaux, E. An assessment of ground-based GNSS Zenith Total Delay observation errors and their correlations using the Met Office UKV model. Q. J. R. Meteorol. Soc. 2017, 143, 2436–2447. [Google Scholar] [CrossRef]
- Macpherson, S.; Laroche, S. Estimation of ground-based GNSS Zenith Total Delay temporal observation error correlations using data from the NOAA and E-GVAP networks. Q. J. R. Meteorol. Soc. 2019, 145, 513–529. [Google Scholar] [CrossRef]
- Mile, M.; Benáček, P.; Rózsa, S. The use of GNSS zenith total delays in operational AROME/Hungary 3D-Var over a central European domain. Atmos. Meas. Tech. 2019, 12, 1569–1579. [Google Scholar] [CrossRef] [Green Version]
- Rohm, W.; Guzikowski, J.; Wilgan, K.; Kryza, M. 4DVAR assimilation of GNSS zenith path delays and precipitable water into a numerical weather prediction model WRF. Atmos. Meas. Tech. 2019, 12, 345–361. [Google Scholar] [CrossRef] [Green Version]
- Lagouvardos, K.; Kotroni, V.; Bezes, A.; Koletsis, I.; Kopania, T.; Lykoudis, S.; Mazarakis, N.; Papagiannaki, K.; Vougioukas, S. The automatic weather stations NOANN network of the National Observatory of Athens: Operation and database. Geosci. Data J. 2017, 4, 4–16. [Google Scholar] [CrossRef]
- Papagiannaki, K.; Lagouvardos, K.; Kotroni, V. A database of high-impact weather events in Greece: A descriptive impact analysis for the period 2001–2011. Nat. Hazards Earth Syst. Sci. 2013, 13, 727–736. [Google Scholar] [CrossRef]
- Michaelides, S.; Karacostas, T.; Sánchez, J.L.; Retalis, A.; Pytharoulis, I.; Homar, V.; Romero, R.; Zanis, P.; Giannakopoulos, C.; Bühl, J.; et al. Reviews and perspectives of high impact atmospheric processes in the Mediterranean. Atmos. Res. 2018, 208, 4–44. [Google Scholar] [CrossRef]
- Galanaki, E.; Kotroni, V.; Lagouvardos, K.; Argiriou, A. A ten-year analysis of cloud-to-ground lightning activity over the Eastern Mediterranean region. Atmos. Res. 2015, 166, 213–222. [Google Scholar] [CrossRef]
- Kotroni, V.; Lagouvardos, K. Lightning in the Mediterranean and its relation with sea-surface temperature. Environ. Res. Lett. 2016, 11, 34006. [Google Scholar] [CrossRef]
- Lagouvardos, K.; Kotroni, V.; Dobricic, S.; Nickovic, S.; Kallos, G. The storm of October 21–22, 1994, over Greece: Observations and model results. J. Geophys. Res. Atmos. 1996, 101, 26217–26226. [Google Scholar] [CrossRef]
- Lagouvardos, K.; Kotroni, V.; Defer, E. The 21–22 January 2004 explosive cyclogenesis over the Aegean Sea: Observations and model analysis. Q. J. R. Meteorol. Soc. 2007, 133, 1519–1531. [Google Scholar] [CrossRef]
- Kotroni, V.; Lagouvardos, K.; Kallos, G.; Ziakopoulos, D. Severe flooding over central and southern greece associated with pre-cold frontal orographic lifting. Q. J. R. Meteorol. Soc. 1999, 125, 967–991. [Google Scholar] [CrossRef]
- Lagouvardos, K.; Kotroni, V.; Nickovic, S.; Jovic, D.; Kallos, G.; Tremback, C.J. Observations and model simulations of a winter sub-synoptic vortex over the central Mediterranean. Meteorol. Appl. 1999, 6, 371–383. [Google Scholar] [CrossRef]
- Fita, L.; Flaounas, E. Medicanes as subtropical cyclones: The December 2005 case from the perspective of surface pressure tendency diagnostics and atmospheric water budget. Q. J. R. Meteorol. Soc. 2018, 144, 1028–1044. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Liu, Z.; Berner, J.; Wang, W.; Powers, J.G.; Duda, M.G.; Barker, D.; et al. A Description of the Advanced Research WRF Model Version 4; NCAR: Boulder, CO, USA, 2008. [Google Scholar]
- Galanaki, E.; Lagouvardos, K.; Kotroni, V.; Giannaros, T.M.; Giannaros, C. Calibration and evaluation of WRF-Hydro performance at two drainage basins in the region of Attica, Greece. In Proceedings of the EMS Annual Meeting, Copenhagen, Denmark, 9–13 September 2019. [Google Scholar]
- Giannaros, T.M.; Kotroni, V.; Lagouvardos, K. IRIS—Rapid response fire spread forecasting system: Development, calibration and evaluation. Agric. For. Meteorol. 2019, 279, 107745. [Google Scholar] [CrossRef]
- Thompson, G.; Field, P.R.; Rasmussen, R.M.; Hall, W.D. Explicit Forecasts of Winter Precipitation Using an Improved Bulk Microphysics Scheme. Part II: Implementation of a New Snow Parameterization. Mon. Weather Rev. 2008, 136, 5095–5115. [Google Scholar] [CrossRef]
- Kain, J.S. The Kain–Fritsch Convective Parameterization: An Update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Lim, J. The WRF single-moment 6-class microphysics scheme (WSM6). J. Korean Meteorol. Soc. 2006, 42, 129–151. [Google Scholar]
- Jiménez, P.A.; Dudhia, J.; González-Rouco, J.F.; Navarro, J.; Montávez, J.P.; García-Bustamante, E. A Revised Scheme for the WRF Surface Layer Formulation. Mon. Weather Rev. 2012, 140, 898–918. [Google Scholar] [CrossRef] [Green Version]
- Tewari, M.; Chen, F.; Wang, W.; Dudhia, J.; LeMone, M.A.; Mitchell, K.; Ek, M.; Gayno, G.; Wegiel, J.; Cuenca, R. Implementation and verification of the united NOAH land surface model in the WRF model. In Proceedings of the 20th Conference of Weather Analysis and Forecasting/16th Conference on Numerical Weather Prediction, American Meteorological Society, Seattle, WA, USA, 14 January 2004. [Google Scholar]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113, 2–9. [Google Scholar] [CrossRef]
- Barker, D.M.; Huang, W.; Guo, Y.-R.; Bourgeois, A.J.; Xiao, Q.N. A Three-Dimensional Variational Data Assimilation System for MM5: Implementation and Initial Results. Mon. Weather Rev. 2004, 132, 897–914. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.-Y.; Xiao, Q.; Barker, D.M.; Zhang, X.; Michalakes, J.; Huang, W.; Henderson, T.; Bray, J.; Chen, Y.; Ma, Z.; et al. Four-Dimensional Variational Data Assimilation for WRF: Formulation and Preliminary Results. Mon. Weather Rev. 2009, 137, 299–314. [Google Scholar] [CrossRef] [Green Version]
- Mazzarella, V.; Maiello, I.; Capozzi, V.; Budillon, G.; Ferretti, R. Comparison between 3D-Var and 4D-Var data assimilation methods for the simulation of a heavy rainfall case in central Italy. Adv. Sci. Res. 2017, 14, 271–278. [Google Scholar] [CrossRef] [Green Version]
- Waller, J.A.; Dance, S.L.; Lawless, A.S.; Nichols, N.K. Estimating correlated observation error statistics using an ensemble transform Kalman filter. Tellus A Dyn. Meteorol. Oceanogr. 2014, 66, 23294. [Google Scholar] [CrossRef] [Green Version]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s Spectral Statistical-Interpolation Analysis System. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Yucel, I.; Onen, A. Evaluating a mesoscale atmosphere model and a satellite-based algorithm in estimating extreme rainfall events in northwestern Turkey. Nat. Hazards Earth Syst. Sci. 2014, 14, 611–624. [Google Scholar] [CrossRef] [Green Version]
- EUREF. Available online: http://www.euref.eu/ (accessed on 24 January 2019).
- Pikridas, C.; Katsougiannopoulos, S.; Zinas, N. A comparative study of zenith tropospheric delay and precipitable water vapor estimates using scientific GPS processing software and web based automated PPP service. Acta Geod. Geophys. 2014, 49, 177–188. [Google Scholar] [CrossRef]
- Fotiou, A.; Pikridas, C.; Rossikopoulos, D.; Katsougiannopoulos, S.; Bitharis, S.; Karolos, I. Geodetic activities of GNSS QC research team of AUTh. In Proceedings of the EUREF 2016 Symposium, San Sebastian, Spain, 25–27 May 2016. [Google Scholar]
- Katsougiannopoulos, S.; Pikridas, C.; Zinas, C.; Karolos, I.; Bitharis, S. Near Real Time graphical representation of Tropospheric and Positioning products. In Proceedings of the COST-ES1206 Final Workshop, Noordwijk, The Netherlands, 21–23 February 2017. [Google Scholar]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Sofware Version 5.2; University of Bern, Bern Open Publishing: Bern, Germany, 2015. [Google Scholar]
- Pikridas, C.; Fotiou, A.; Karolos, I.; Bitharis, S. First Results of BeRTISS Project. In Proceedings of the EGU General Assembly, Vienna, Austria, 8–13 April 2018. [Google Scholar]
- Bosy, J.; Kaplon, J.; Rohm, W.; Sierny, J.; Hadas, T. Near real-time estimation of water vapour in the troposphere using ground GNSS and the meteorological data. Ann. Geophys. 2012, 30, 1379–1391. [Google Scholar] [CrossRef] [Green Version]
- Dymarska, N.; Rohm, W.; Sierny, J.; Kapłon, J.; Kubik, T.; Kryza, M.; Jutarski, J.; Gierczak, J.; Kosierb, R. An assessment of the quality of near-real time GNSS observations as a potential data source for meteorology. Meteorol. Hydrol. Water Manag. 2017, 5, 3–13. [Google Scholar] [CrossRef]
- Wilgan, K.; Rohm, W.; Bosy, J. Multi-observation meteorological and GNSS data comparison with Numerical Weather Prediction model. Atmos. Res. 2015, 156, 29–42. [Google Scholar] [CrossRef]
- Offiler, D. EIG EUMETNET GNSS Water Vapour Programme (E-GVAP-II); Product Requirements Document; Met Office: Yassett, UK, 2010. [Google Scholar]
- Giannaros, T.M.; Kotroni, V.; Lagouvardos, K. WRF-LTNGDA: A lightning data assimilation technique implemented in the WRF model for improving precipitation forecasts. Environ. Model. Softw. 2016, 76, 54–68. [Google Scholar] [CrossRef]
- Dafis, S.; Lagouvardos, K.; Kotroni, V.; Giannaros, T.M.; Bartzokas, A. Observational and modeling study of a mesoscale convective system during the HyMeX—SOP1. Atmos. Res. 2017, 187, 1–15. [Google Scholar] [CrossRef]
- Dafis, S.; Fierro, A.; Giannaros, T.M.; Kotroni, V.; Lagouvardos, K.; Mansell, E. Performance Evaluation of an Explicit Lightning Forecasting System. J. Geophys. Res. Atmos. 2018, 123, 5130–5148. [Google Scholar] [CrossRef]
- Sikder, M.S.; Hossain, F. Sensitivity of initial-condition and cloud microphysics to the forecasting of monsoon rainfall in South Asia. Meteorol. Appl. 2018, 25, 493–509. [Google Scholar] [CrossRef] [Green Version]
- Mazarakis, N.; Kotroni, V.; Lagouvardos, K.; Argiriou, A.A. The sensitivity of numerical forecasts to convective parameterization during the warm period and the use of lightning data as an indicator for convective occurrence. Atmos. Res. 2009, 94, 704–714. [Google Scholar] [CrossRef]
- Sun, J.; Trier, S.B.; Xiao, Q.; Weisman, M.L.; Wang, H.; Ying, Z.; Xu, M.; Zhang, Y. Sensitivity of 0-12-h warm-season precipitation forecasts over the central United States to model initialization. Weather Forecast. 2012, 27, 832–855. [Google Scholar] [CrossRef]
- Mercer, A.; Dyer, J.; Zhang, S. Warm-season thermodynamically-driven rainfall prediction with support vector machines. Procedia Comput. Sci. 2013, 20, 128–133. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Case Study | Driving Meteorological Mechanism | Maximum Total Rainfall | Impacts |
|---|---|---|---|---|
| Dry | May 10 | Unstable atmospheric conditions resulting in strong convective activity | 74 mm in 1 h over Thessaloniki | Flash flooding; houses, monuments, electricity supply and transportation were affected |
| June 16 | Unstable atmospheric conditions resulting in strong convective activity | ~ 65 mm in 1 h over Skopelos island | Major damages in housing, crops, rural roads and electricity supply | |
| July 26 | Unstable atmospheric conditions resulting in strong convective activity | > 100 mm in less than 2 h over northern suburbs of Athens | Flash flooding; houses, vehicles and transportation were affected | |
| August 27–28 | Unstable atmospheric conditions resulting in strong convective activity. | > 150 mm in 24 h over northern Greece and > 90 mm in 24 h over central Greece and Crete | Flash flooding; houses, telecommunications, electricity supply and transportation were affected | |
| Wet | September 29–30 | Low-pressure system with tropical characteristics (Medicane; [37,38]) | ~ 500 mm in 48 h over Phiotis region | Floods and landslides; four dead people; extensive damages in buildings and public infrastructures |
| November 18 | Low-pressure system | 133 mm in 24 h over northern Greece | Flash flooding; crops and road network were affected | |
| November 26–27 | Low-pressure system | 161 mm in 48 h over northwest Greece | Floods and landslides; housing, public infrastructures and road network were affected |
| Physics | Parameterization | References |
|---|---|---|
| Microphysics | Thompson | Thompson et al. [42] |
| Convection 1 | Kain-Fritsch | Kain [43] |
| Planetary boundary layer | Yonsei University | Hong et al. [44] |
| Surface layer | Revised MM5 | Jiménez et al. [45] |
| Land surface | Noah | Tewari et al. [46] |
| Short- and long-wave radiation | RRTMG | Iacono et al. [47] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giannaros, C.; Kotroni, V.; Lagouvardos, K.; Giannaros, T.M.; Pikridas, C. Assessing the Impact of GNSS ZTD Data Assimilation into the WRF Modeling System during High-Impact Rainfall Events over Greece. Remote Sens. 2020, 12, 383. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030383
Giannaros C, Kotroni V, Lagouvardos K, Giannaros TM, Pikridas C. Assessing the Impact of GNSS ZTD Data Assimilation into the WRF Modeling System during High-Impact Rainfall Events over Greece. Remote Sensing. 2020; 12(3):383. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030383
Chicago/Turabian StyleGiannaros, Christos, Vassiliki Kotroni, Konstantinos Lagouvardos, Theodore M. Giannaros, and Christos Pikridas. 2020. "Assessing the Impact of GNSS ZTD Data Assimilation into the WRF Modeling System during High-Impact Rainfall Events over Greece" Remote Sensing 12, no. 3: 383. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12030383