Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter



Abstract
:
1. Introduction
2. Materials and Methods
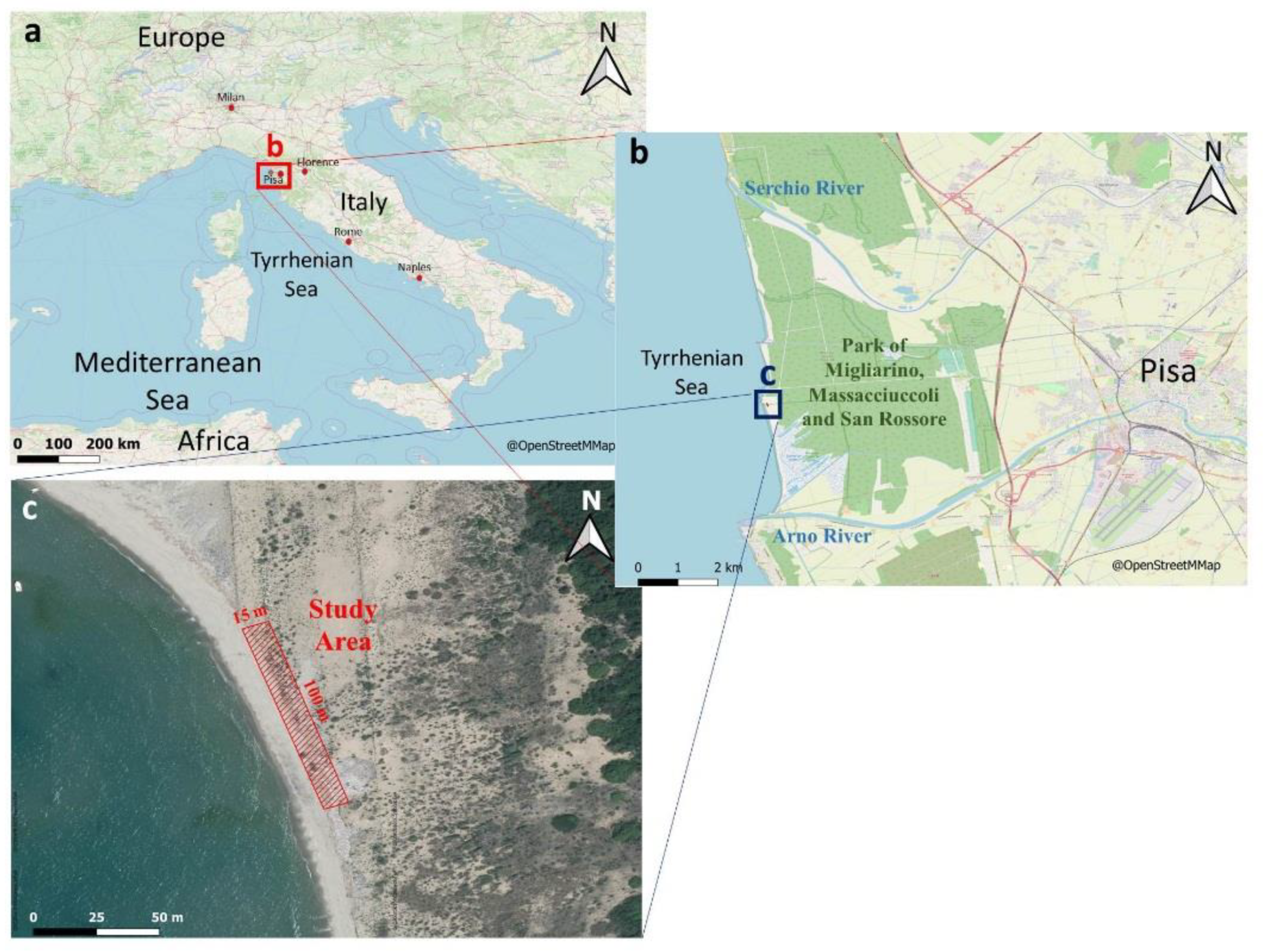
2.1. The Study Area
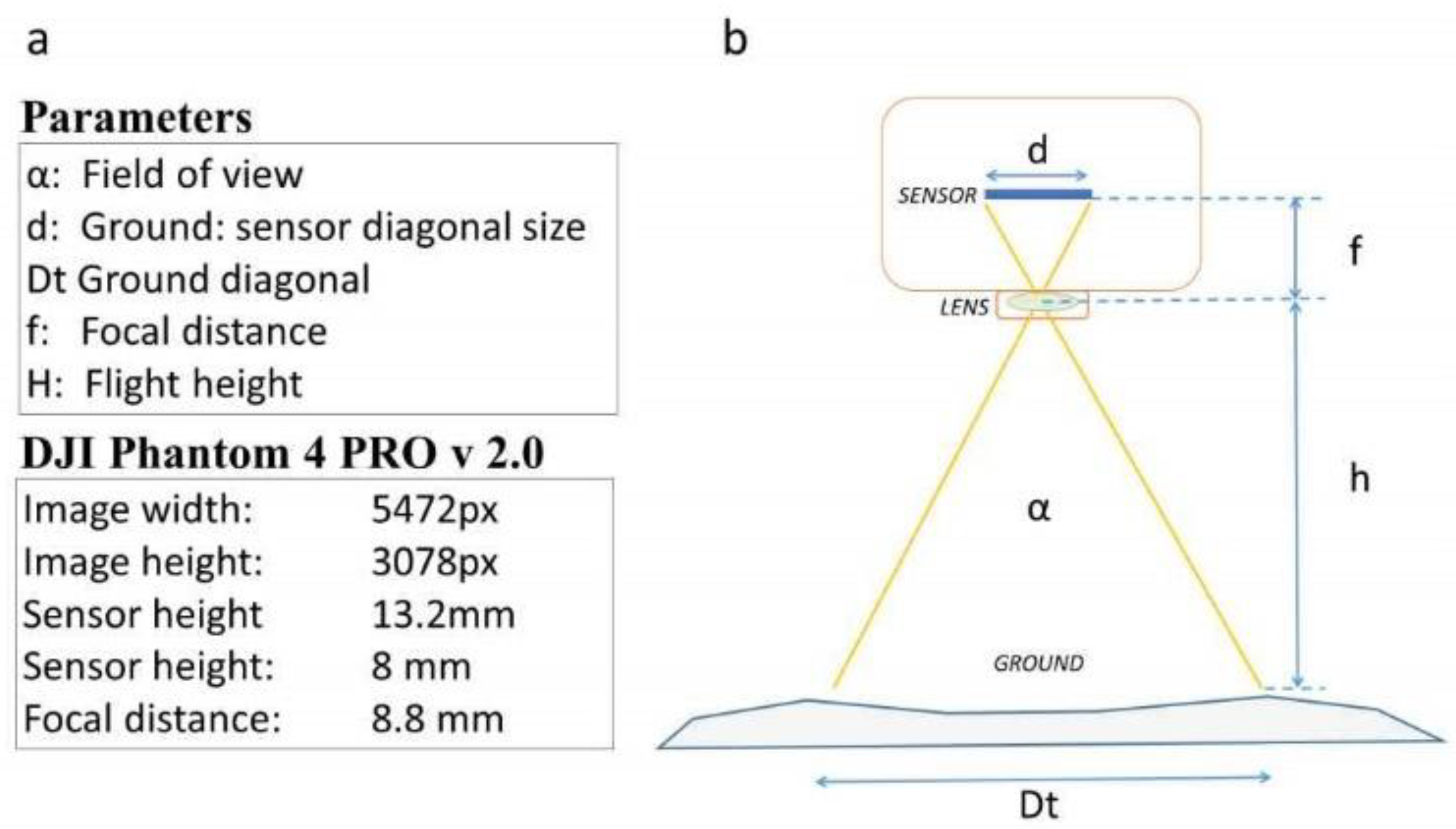
2.2. Characteristics of the Used UAV
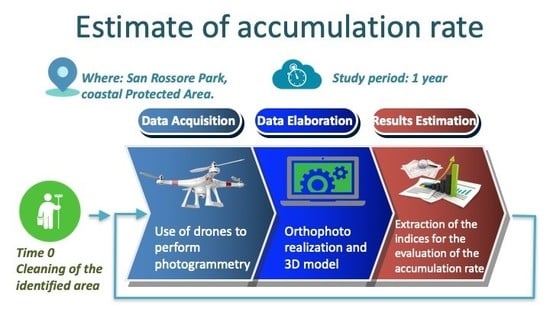
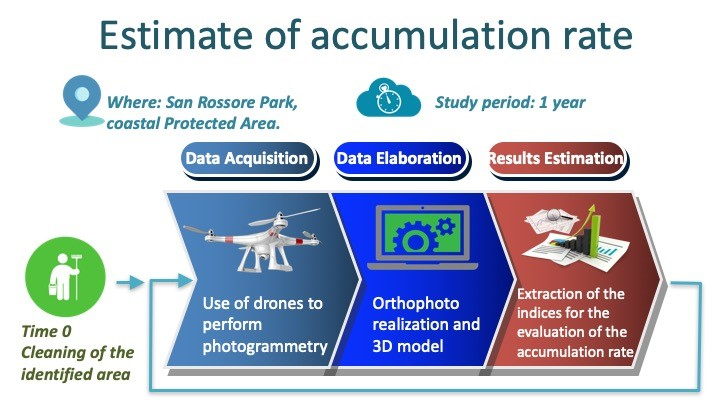
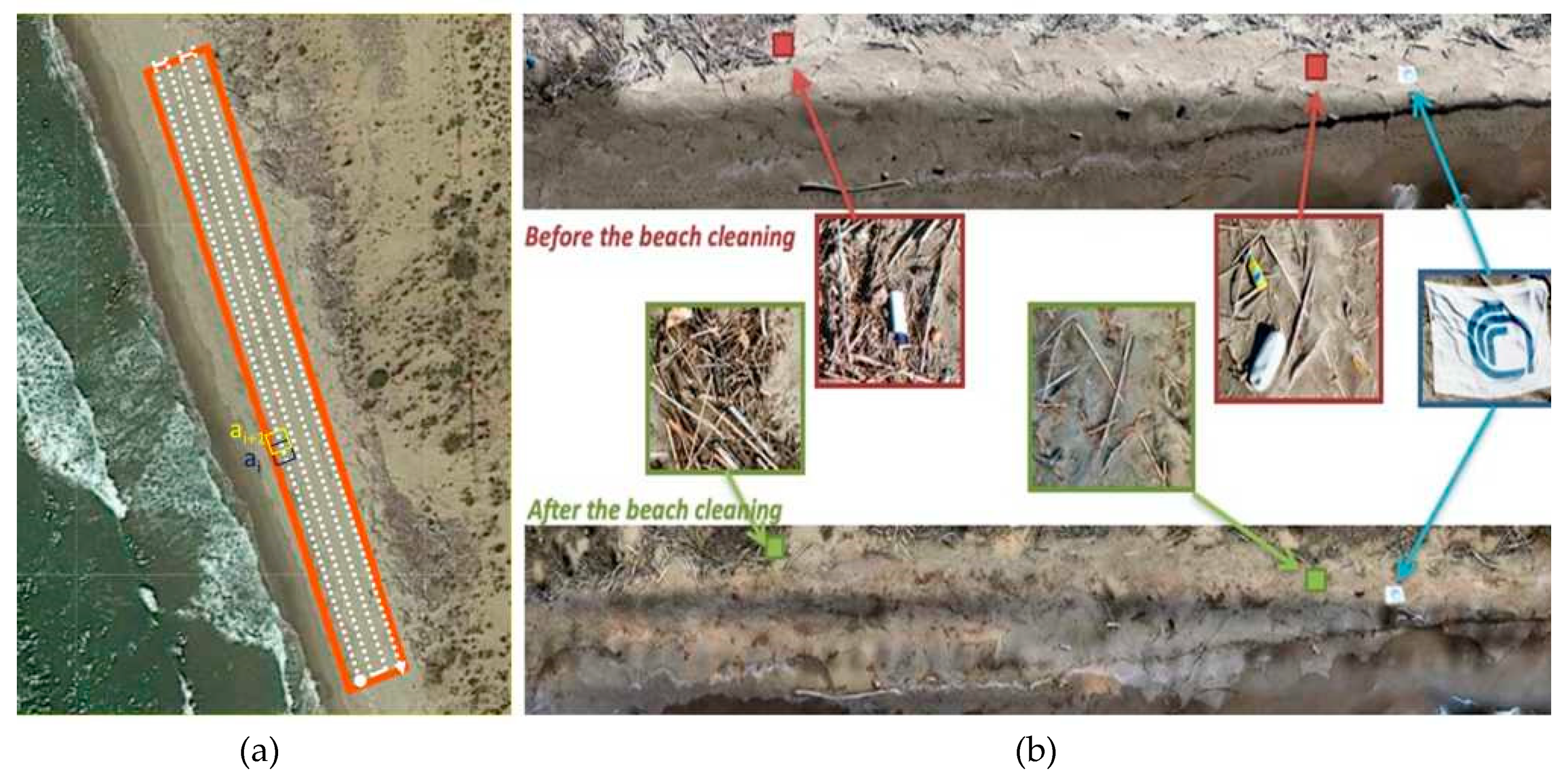
2.3. Survey Realization
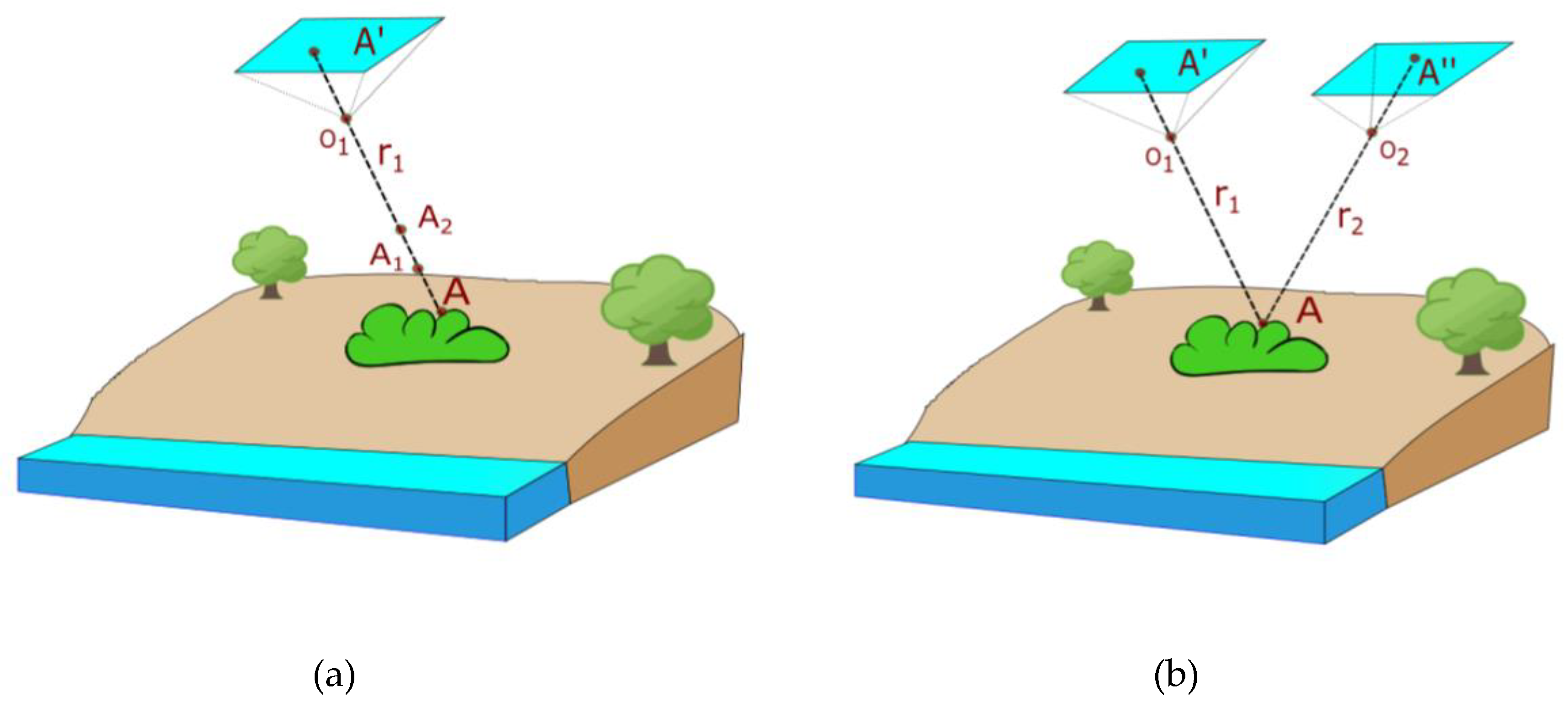
2.4. Image Acquisition and Processing
2.5. Data Acquisition from Images and Data Analysis
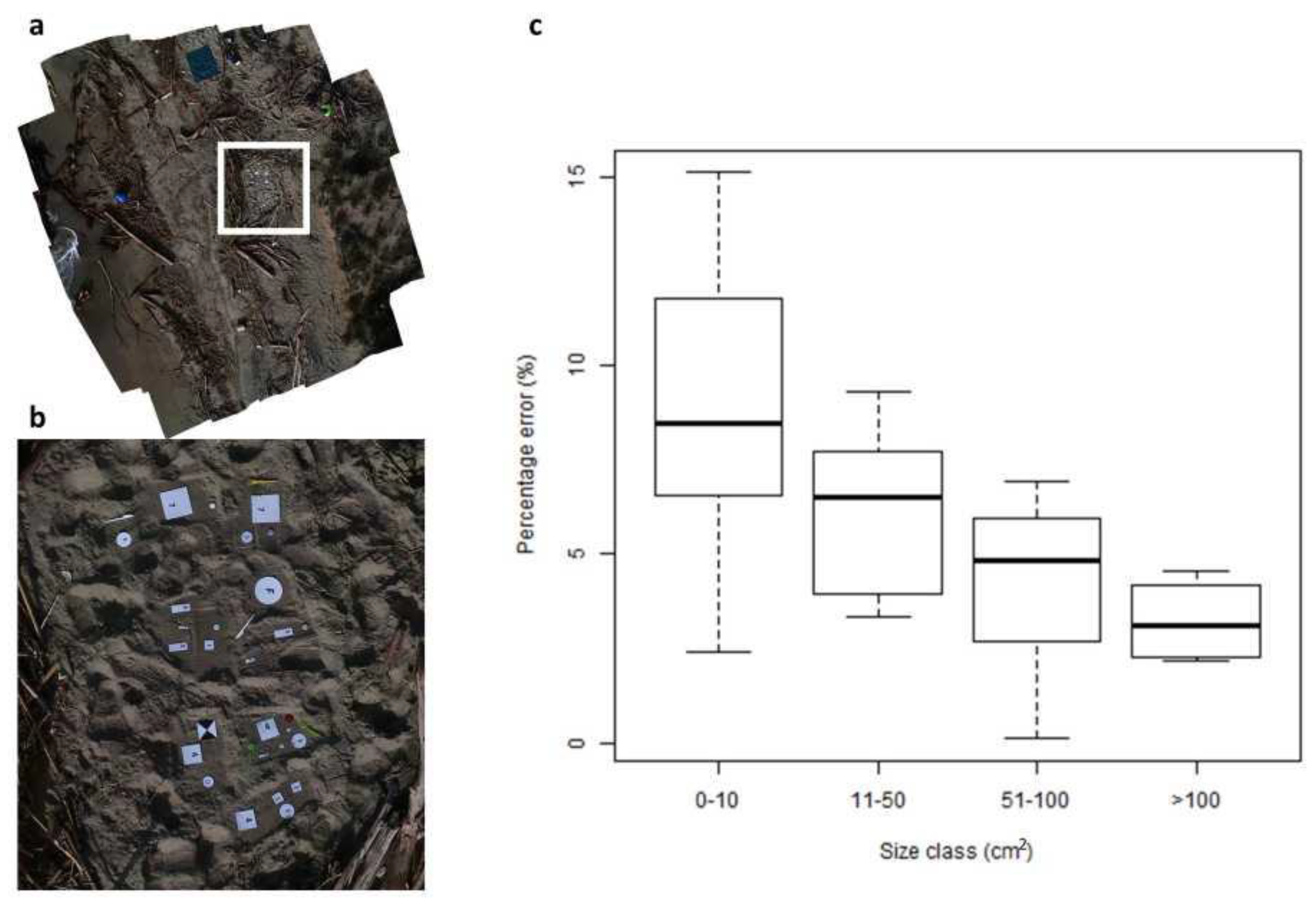
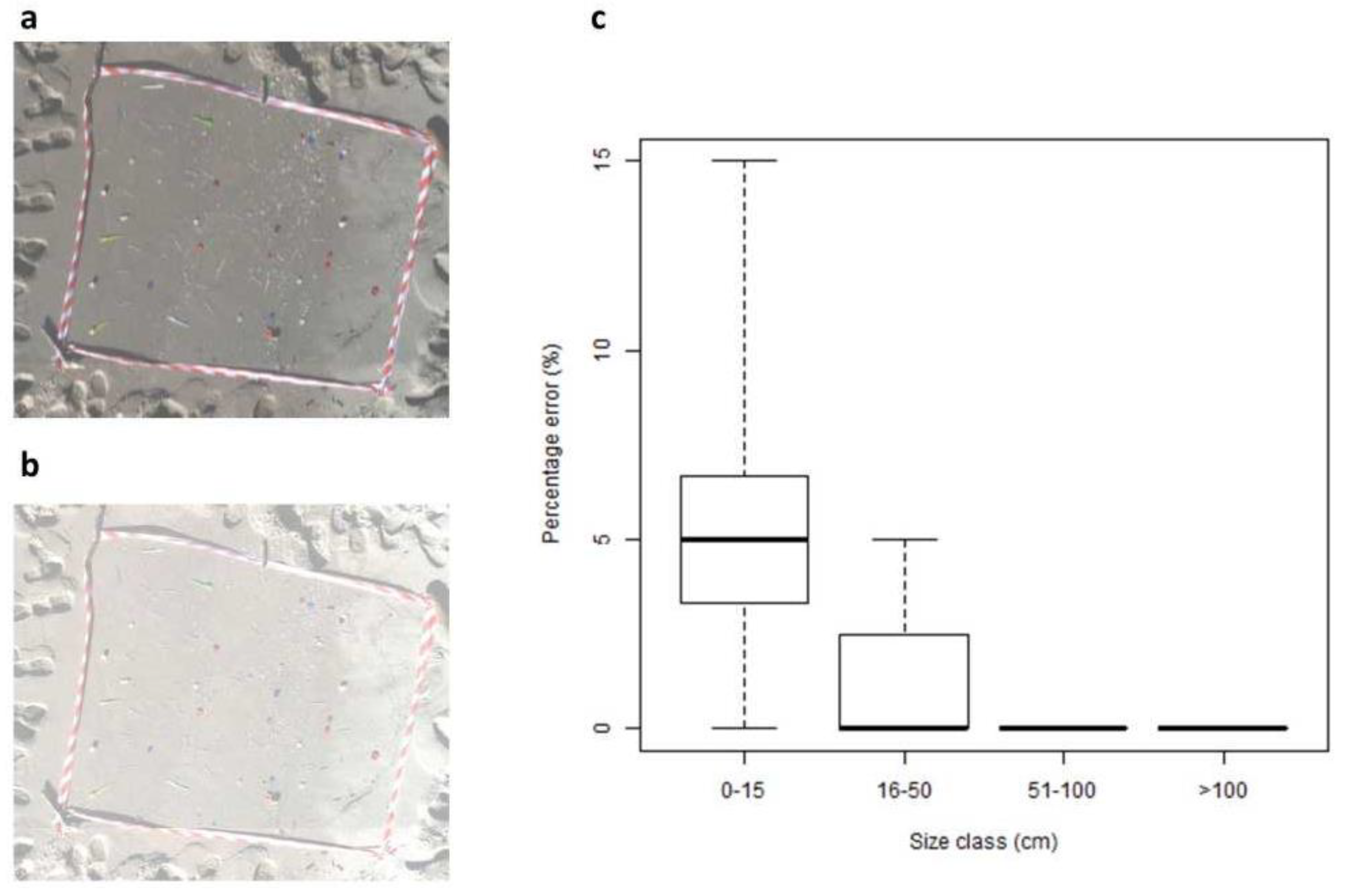
- PES = (Sm-Sa)/Sa × 100 where PES is the percentage error on size (object surface area) estimation, Sm is the measured object size, Sa is the actual object size;
- PEN = (Nm-Na)/Na × 100 where PEN is the percentage error on the number of objects estimation, Nm is the measured object number, Na is the actual object number.
3. Results
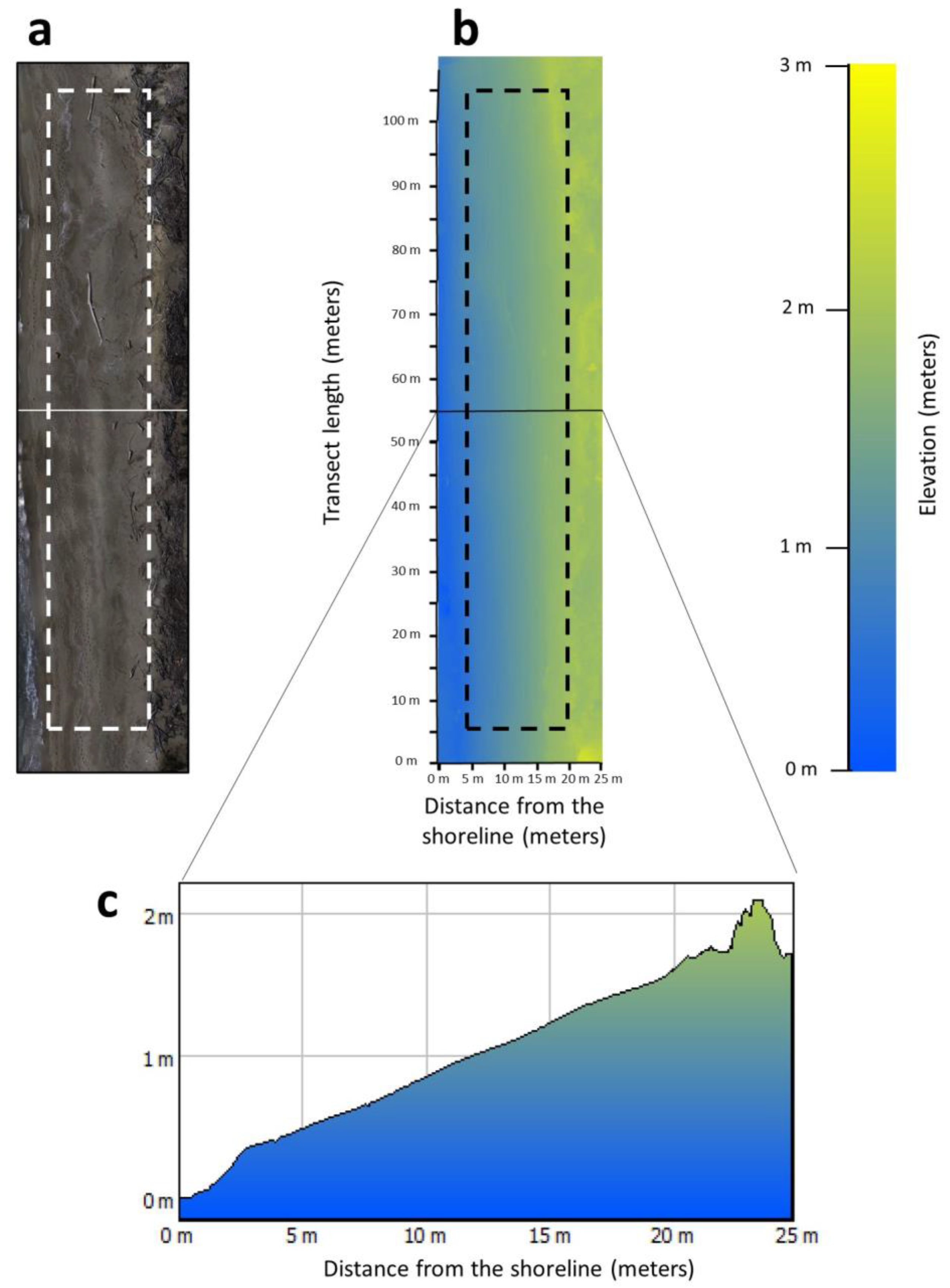
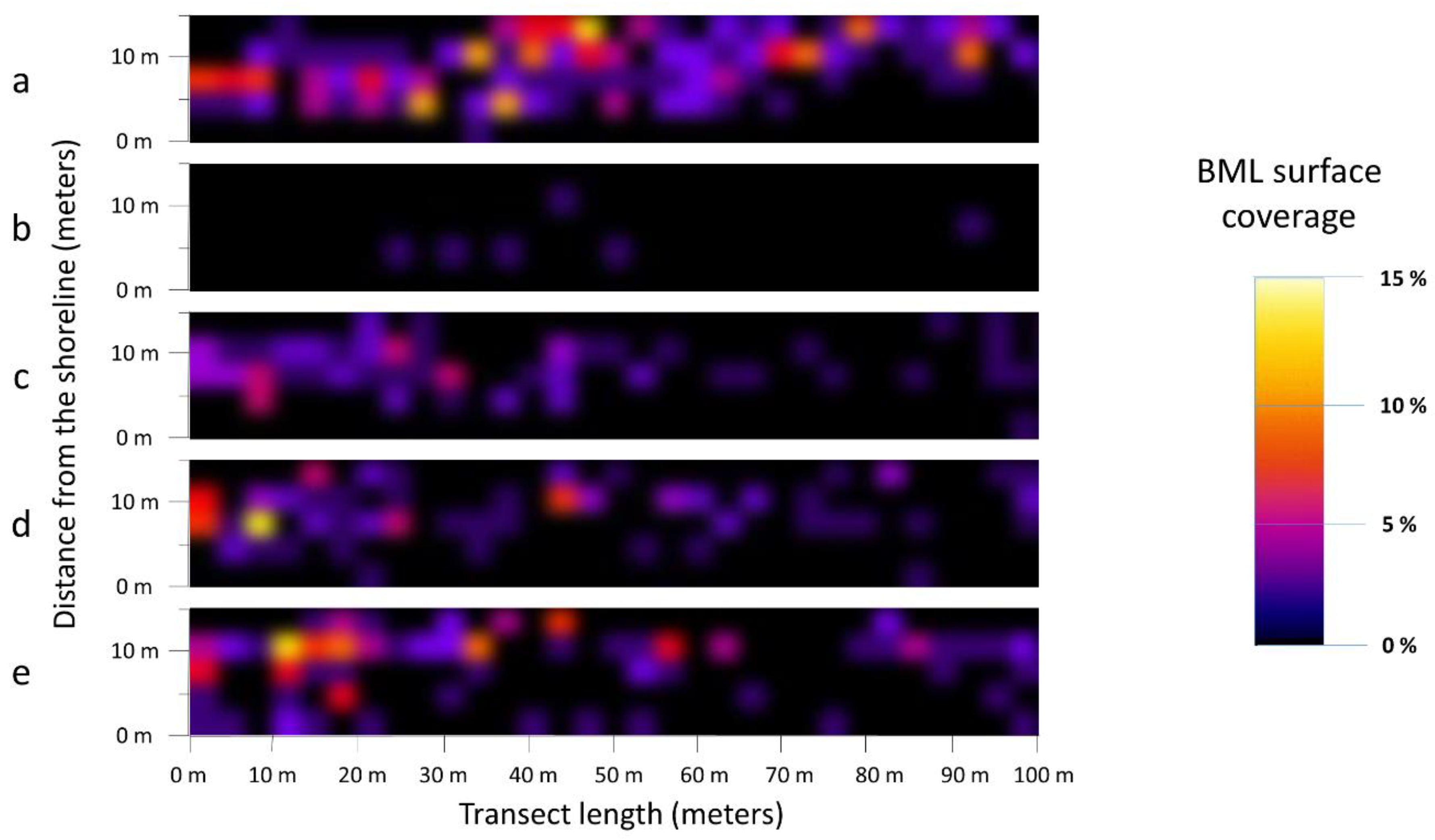
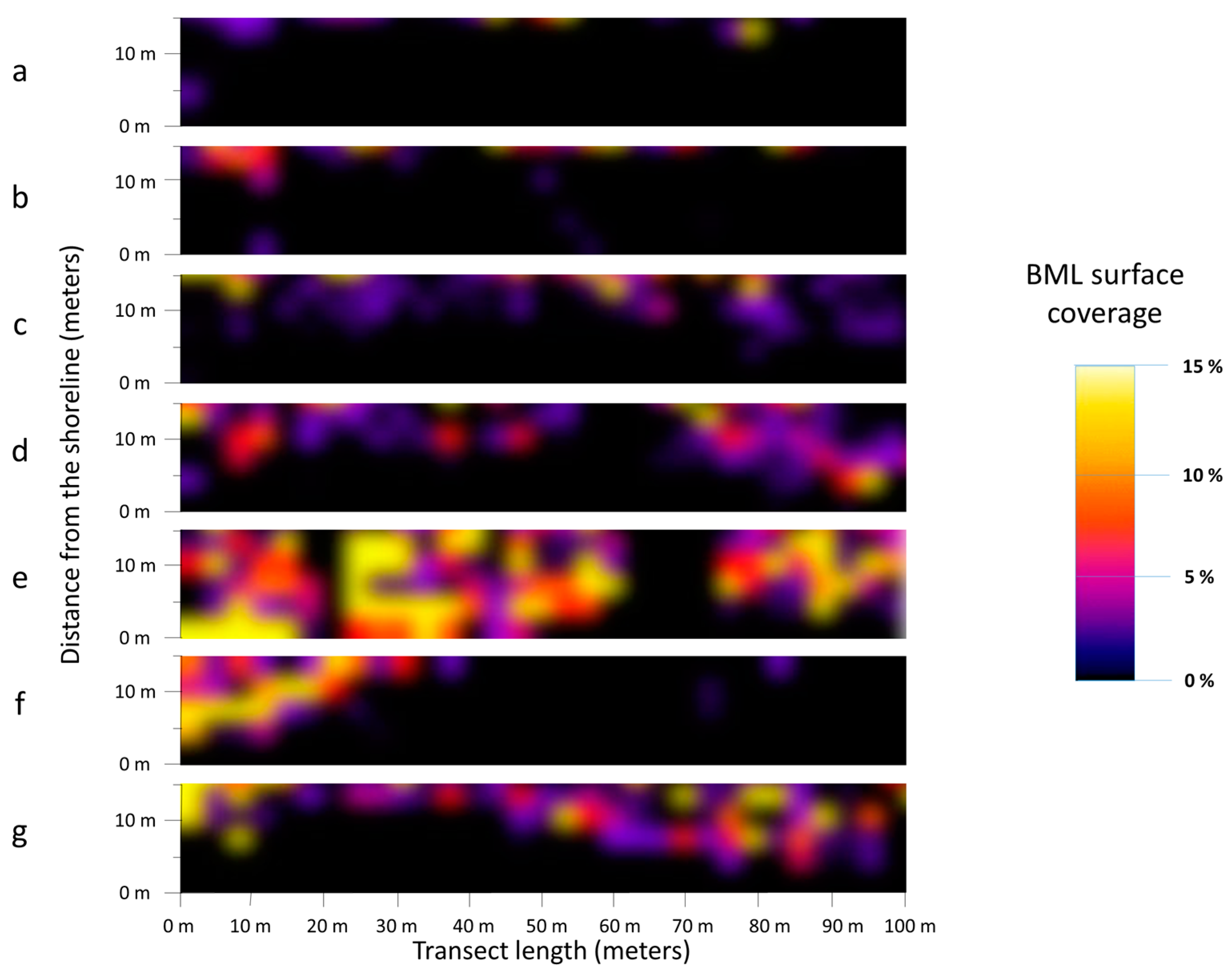
3.1. Two-Dimensional Distribution of BML on the Beach
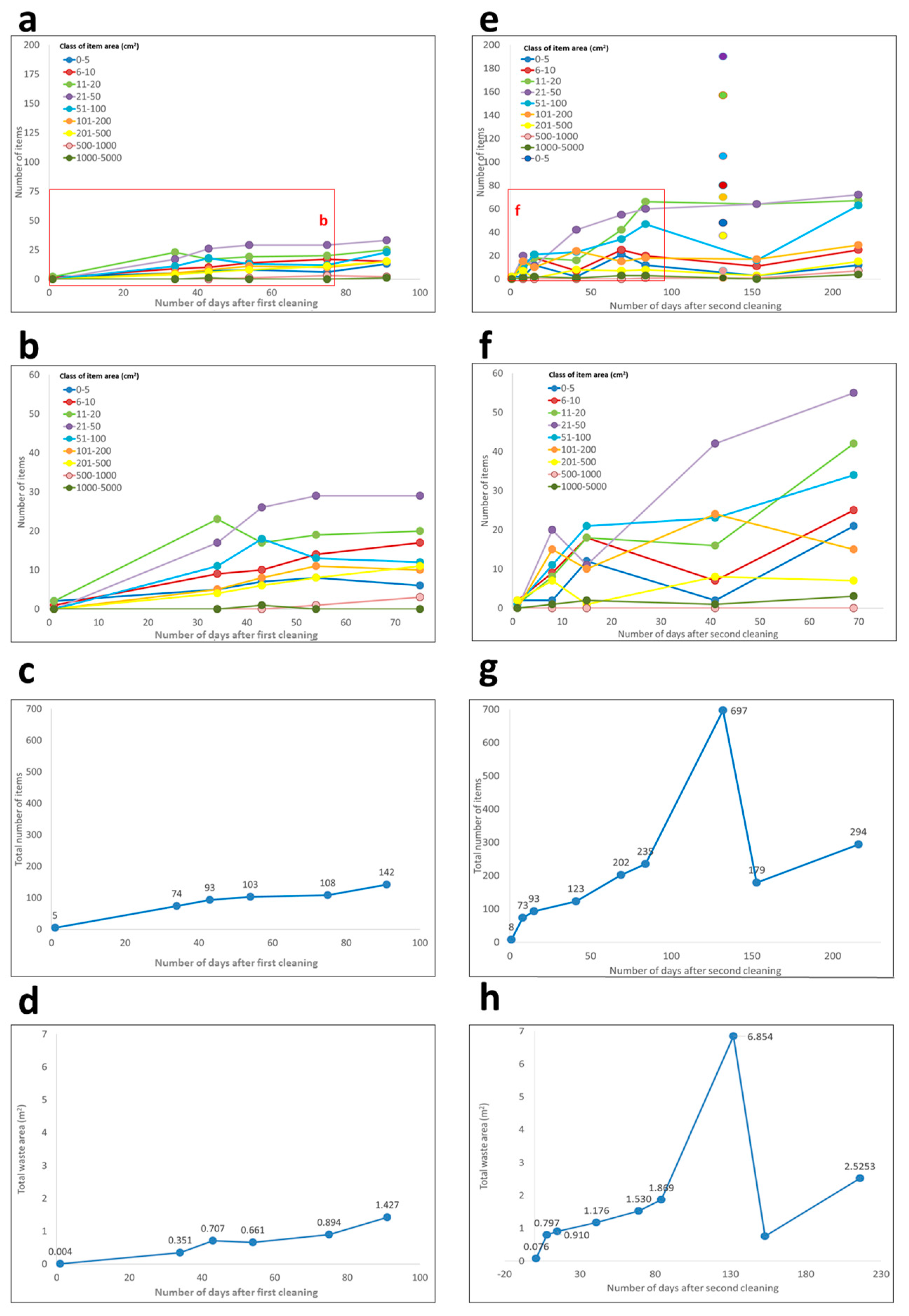
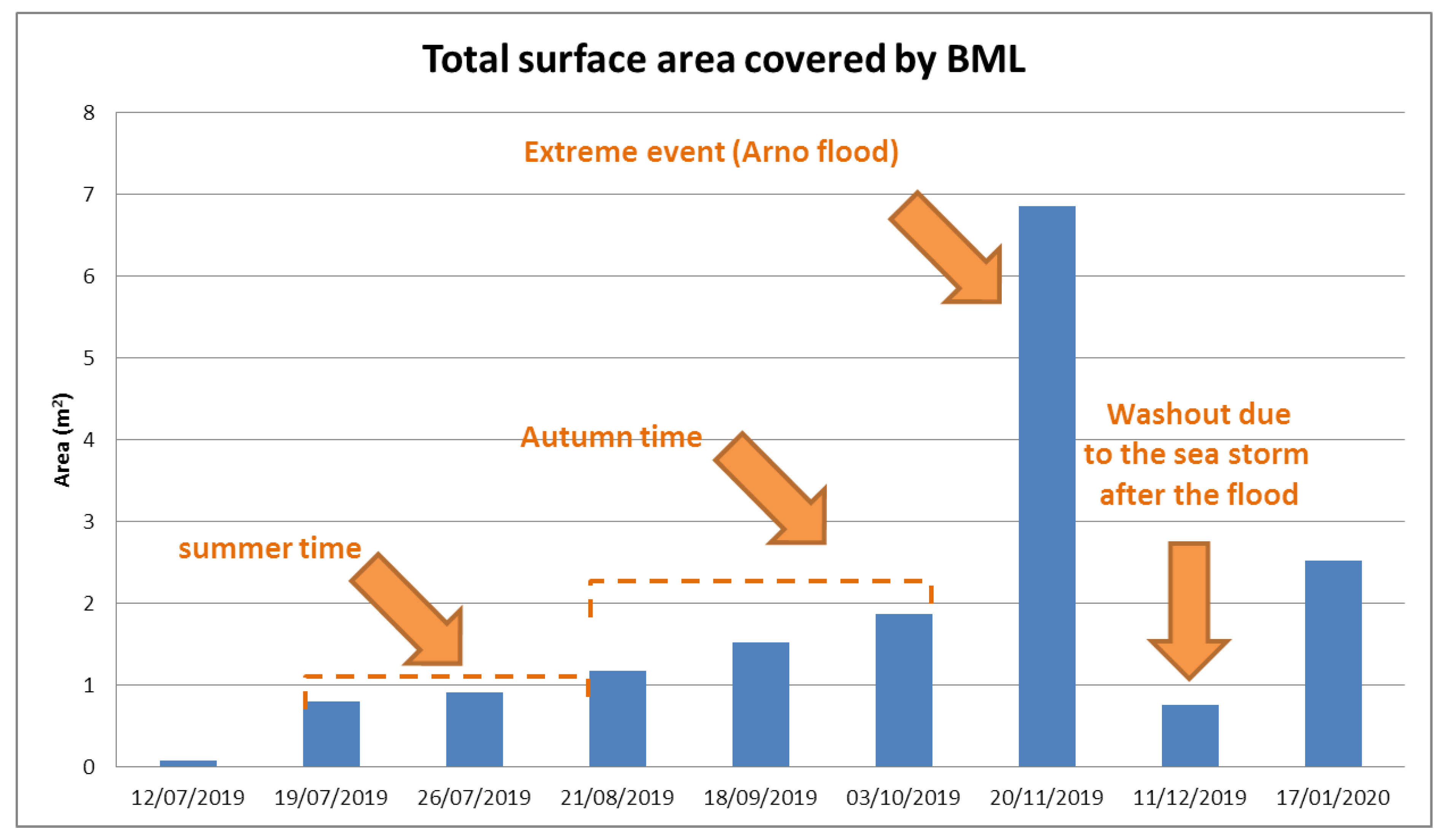
3.2. Quantity, Typology, and Accumulation Rate of BML
3.3. Comparison with “Standard” Survey Results
4. Discussion
- Hidden BML (for example under trunks or other objects) could be easily identified by human inspection, while this was almost impossible for UAV;
- Almost completely buried BML could be extracted by humans from sand, identified and then counted, while UAVs cannot do the same, obviously;
- Some transparent BML, especially fragments of plastic bags and thin films, are often not detected by the UAV camera;
- Small BMLs can be overestimated by manual counting. In fact, while for the protocol suggested by the OSPAR macro-waste guidelines (to which our specific SeaCleaner local monitoring protocol refers), objects smaller than 2.5 cm should not be considered [15,52,53,55], however, during manual counting such small objects were often counted equally, contrary to the recognition and counting by orthophotos.
5. Conclusions and Further Improvement
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cózar, A.; Echevarría, F.; González-Gordillo, J.I.; Irigoien, X.; Úbeda, B.; Hernández-León, S.; Palma, A.T.; Navarro, S.; Garcia-de-Lomas, J.; Ruiz, A.; et al. Plastic debris in the open ocean. Proc. Natl. Acad. Sci. USA 2014, 111, 10239–10244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cannizzaro, L.; Garofalo, G.; Giusto, G.; Rizzo, P.; Levi, D. Qualitative and quantitative estimate of solid waste in the channel of Sicily. In Proceedings of the Second International Conforence on the Mediterranean Coastal Environment, MED-COAST, Tarragona, Spain, 24–27 October 1995. [Google Scholar]
- Galgani, F.; Jaunet, S.; Campillo, A.; Guenegen, X.; His, E. Distribution and abundance of debris on the continental shelf of the north-western Mediterranean Sea. Mar. Pollut. Bull. 1995, 30, 713–717. [Google Scholar] [CrossRef]
- Cózar, A.; Sanz-Martín, M.; Martí, E.; González-Gordillo, J.I.; Ubeda, B.; Gálvez, J.Á.; Irigoien, X.; Duarte, C.M. Plastic accumulation in the mediterranean sea. PLoS ONE 2015, 10, 0121762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alomar, C.; Estarellas, F.; Deudero, S. Microplastics in the Mediterranean Sea: Deposition in coastal shallow sediments, spatial variation and preferential grain size. Mar. Environ. Res. 2016, 115, 1–10. [Google Scholar] [CrossRef]
- Suaria, G.; Avio, C.G.; Mineo, A.; Lattin, G.L.; Magaldi, M.G.; Belmonte, G.; Moore, C.J.; Regoli, F.; Aliani, S. The Mediterranean plastic soup: Synthetic polymers in Mediterranean surface waters. Sci. Rep. 2016, 6, 37551. [Google Scholar] [CrossRef]
- MedSeaLitter EU Project. Available online: https://medsealitter.interreg-med.eu (accessed on 2 February 2020).
- Andrady, A.L. Microplastics in the marine environment. Mar. Pollut. Bull. 2011, 62, 1596–1605. [Google Scholar] [CrossRef]
- Andrady, A.L. The plastic in microplastics: A review. Mar. Pollut. Bull. 2017, 119, 12–22. [Google Scholar] [CrossRef]
- Saliu, F.; Montano, S.; Garavaglia, M.G.; Lasagni, M.; Seveso, D.; Galli, P. Microplastic and charred microplastic in the Faafu Atoll, Maldives. Mar. Pollut. Bull. 2018, 136, 464–471. [Google Scholar] [CrossRef]
- Saliu, F.; Montano, S.; Leoni, B.; Lasagni, M.; Galli, P. Microplastics as a threat to coral reef environments: Detection of phthalate esters in neuston and scleractinian corals from the Faafu Atoll, Maldives. Mar. Pollut. Bull. 2019, 142, 234–241. [Google Scholar] [CrossRef]
- Olivelli, A.; Hardesty, D.; Wilcox, C. Coastal margins and backshores represent a major sink for marine debris: Insights from a continental-scale analysis. Environ. Res. Lett. 2020, in press. [Google Scholar] [CrossRef]
- Lebreton, L.C.M.; van der Zwet, J.; Damsteeg, J.-W.; Slat, B.; Andrady, A.; Reisser, J. River plastic emissions to the world’s oceans. Nat. Commun. 2017. [Google Scholar] [CrossRef] [PubMed]
- Pierdomenico, M.; Casalbore, D.; Chiocci, F.L. Massive benthic litter funnelled to deep sea by flash- flood generated hyperpycnal flows. Sci. Rep. 2019, 9, 5330. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- OSPAR Commission. Guideline for Monitoring Marine Litter on the Beaches in the OSPAR Maritime Area; OSPAR Commission: London, UK, 2010. [Google Scholar]
- Galgani, F.; Hanke, G.; Werner, S.; Oosterbaan, L.; Nilsson, P.; Fleet, D.; Kinsey, S.; Thompson, R.C.; van Franeker, J.; Vlachogianni, T.; et al. Guidance on Monitoring of Marine Litter in European Seas; Publications Office of the European Union: Brussels, Belgium, 2013. [CrossRef]
- UN Environment. Combating Marine Plastic Litter and Microplastics: An Assessment of the Effectiveness of Relevant International, Regional and Subregional Governance Strategies and Approaches; UN Environment: Nairobi, Kenya, 2017. [Google Scholar]
- GESAMP. Guidelines on the Monitoring and Assessment of Plastic Litter and Microplastics in the Ocean; Kershaw, P.J., Turra, A., Galgani, F., Eds.; (IMO/FAO/ UNESCO IOC/UNIDO/WMO/IAEA/UN/UNEP/UNDP/ISA Joint Group of Experts on the Scientic Aspects of Marine Environmental Protection). Rep. Stud. GESAMP No. 99 130p; GESAMP: London, UK, 2019. [Google Scholar]
- Ryan, P.G.; Turra, A. Guidelines for the Monitoring & Assessment of Plastic Litter in the Ocean Reports & Studies 99; Kershaw, P.J., Turra, A., Galgani, F., Eds.; GESAMP: London, UK, 2019. [Google Scholar]
- van Emmerik, T.; Schwarz, A. Plastic debris in rivers. Wires Water 2020, 7. [Google Scholar] [CrossRef] [Green Version]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Topouzelis, K.; Papakonstantinou, A.; Garaba, S.P. Detection of floating plastics from satellite and unmanned aerial systems (Plastic Litter Project 2018). Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 175–183. [Google Scholar] [CrossRef]
- Capolupo, A.; Pindozzi, S.; Okello, C.; Fiorentino, N.; Boccia, L. Photogrammetry for environmental monitoring: The use of drones and hydrological models for detection of soil contaminated by copper. Sci. Total Environ. 2015, 514, 298–306. [Google Scholar] [CrossRef]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]
- Holman, R.A.; Holland, K.T.; Lalejini, D.M.; Spansel, S.D. Surf zone characterization from unmanned aerial vehicle imagery. Ocean Dyn. 2011, 61, 1927–1935. [Google Scholar] [CrossRef]
- Manfreda, S.; Mccabe Matthew, F.; Miller Pauline, E.; Lucas, R.; Pajuelo, V.M.; Mallinis, G.; Dor EBen Helman David Estes, L.; Ciraolo, G.; Müllerová, J.; Tauro, F.; et al. Use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; HruÊka, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A re- view. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Baron, J.; Hill, D.J.; Elmiligi, H. Combining image processing and machine learning to identify invasive plants in high-resolution images. Int. J. Remote Sens. 2018, 39, 5099–5118. [Google Scholar] [CrossRef]
- Bonali, F.L.; Tibaldi, A.; Marchese, F.; Fallati, L.; Russo, E.; Corselli, C.; Savini, A. UAV-based surveying in volcano-tectonics: An example from the Iceland rift. J. Struct. Geol. 2019. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Alvárez, J.A.; Gonçalves, G.R.; Cerrillo-Cuenca, E. A protocol for mapping ar- chaeological sites through aerial 4k videos. Digit. Appl. Archaeol. Cult. Herit. 2019, 13. [Google Scholar] [CrossRef]
- Pérez, J.A.; Gonçalves, G.R.; Rangel, J.M.G.; Ortega, P.F. Accuracy and effectiveness of orthophotos obtained from low cost UASs video imagery for traf!c accident scenes documentation. Adv. Eng. Softw. 2019, 132, 47–54. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and classification of ecologically sensitive marine habitats using unmanned aerial vehicle (UAV) imagery and Object-Based Image Analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef] [Green Version]
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The Potential for Unmanned Aerial Vehicles (UAVs) to Conduct Marine Fauna Surveys in Place of Manned Aircraft. Ices, J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Kiszka, J.J.; Mourier, J.; Gastrich, K.; Heithau, M.R. Using unmanned aerial vehicles (UAVs) to investigate shark and ray densities in a shallow coral lagoon. Mar. Ecol. Prog. Ser. 2016, 560, 237–242. [Google Scholar] [CrossRef]
- Levy, J.; Hunter, C.; Lukacazyk, T.; Franklin, E.C. Assessing the spatial distribution of coral bleaching using small unmanned aerial systems. Coral Reefs 2018, 37, 373–387. [Google Scholar] [CrossRef] [Green Version]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris assessment with Unmanned Aerial Vehicle imagery and deeplearning: A case study along the beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693. [Google Scholar] [CrossRef]
- Bao, Z.; Sodango, T.H.; Shifaw, E.; Li, X.; Sha, J. Monitoring of beach litter by automatic interpretation of unmanned aerial vehicle images using the segmentation threshold method. Mar. Pollut. Bull. 2018, 137, 388–398. [Google Scholar] [CrossRef] [PubMed]
- Deidun, A.; Gauci, A.; Lagorio, S.; Galgani, F. Optimising beached litter monitoring protocols through aerial imagery. Mar. Poll. Bull. 2018, 131, 212–217. [Google Scholar] [CrossRef] [PubMed]
- Martin, C.; Parkes, S.; Zhang, Q.; Zhan XMcCabe, M.F.; Duarte, C.M. Use of unmanned aerial vehicles for efcient beach litter monitoring. Mar. Poll. Bull. 2018, 131, 662–673. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, G.; Andriolo, U.; Pinto, L.; Bessa, F. Mapping marine litter using UAS on a beach-dune system: A multidisciplinary approach. Sci. Total Environ. 2019, in press. [Google Scholar] [CrossRef]
- Geraeds, M.; van Emmerik, T.; de Vries, R.; bin Ab Razak, M.S. Riverine plastic litter monitoring using unmanned aerial vehicles (UAVs). Remote Sens. 2019, 11, 2045. [Google Scholar] [CrossRef] [Green Version]
- Thornton, L.; Jackson, N.L. Spatial and temporal variations in debris accumulation and composition on an estuarine shoreline, Cliffwood Beach, New Jersey, USA. Mar. Pollut. Bull. 1998, 36, 705–711. [Google Scholar] [CrossRef]
- Bowman, D.; Manor-Samsonov, N.; Golik, A. Dynamics of litter pollution on Israeli Mediterranean beaches: A budgetary, litter flux approach. J. Coast. Res. 1998, 14, 418–432. [Google Scholar]
- QGIS Development Team (2020). QGIS Geographic Information System. Open Source Geospatial Foundation Project. Available online: http://qgis.osgeo.org (accessed on 30 March 2020).
- OpenStreetMap contributors, licensed under the Creative Commons Attribution-ShareAlike 2.0 license (CC BY-SA). Available online: https://www.openstreetmap.org/copyright/en (accessed on 30 March 2020).
- Regione Toscana. Geoscopio WMS, licensed under the Creative Commons (CC). Available online: https://dronedj.com/2020/01/08/dji-phantom-4-pro-v2-0-is-finally-back/ (accessed on 30 March 2020).
- Merlino, S.; Locritani, M.; Stroobant, M.; Mioni, E.; Tosi, D. SeaCleaner: Focusing citizen science and environment education on unraveling the marine litter problem. Mar. Technol. Soc. J. 2015, 49, 99–118. [Google Scholar] [CrossRef]
- Giovacchini, A.; Merlino, S.; Locritani, M.; Stroobant, M. Spatial distribution of marine litter along italian coastal areas in the Pelagos sanctuary (Ligurian Sea—NW Mediterranean Sea): A focus on natural and urban beaches. Mar. Poll. Bull. 2018, 130, 140–152. [Google Scholar] [CrossRef] [PubMed]
- DRONE Harmony: flight planner and data capture tool, designed to collect drone data (photos or video) for a variety of applications. Available online: https://droneharmony.com (accessed on 30 March 2020).
- Merlino, S.; Abbate, M.; Pietrelli, L.; Canepa, P.; Varella, P. Marine litter detection and correlation with the seabird nest content. Rend. Lincei Sci. Fis. Nat. 2018, 29, 867–875. [Google Scholar] [CrossRef]
- Tuscany region. Regional Hydrological and Geological Sector Archive. Available online: http://www.sir.toscana.it/ (accessed on 30 March 2020).
- Vlachogianni, T.; Anastasopoulou, A.; Fortibuoni, T.; Ronchi, F.; Zeri, C. Marine Litter Assessment in the Adriatic and Ionian Seas; IPA-Adriatic DeFishGear Project: Athens, Greece, 2017; p. 168. ISBN 978-960-6793-25-7. [Google Scholar]
- Suaria, G.; Aliani, S. Floating debris in the Mediterranean Sea. Mar. Pollut. Bull. 2014, 86, 494–504. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 12 April2019 | 13 July 2019 | 17 January 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Standard Survey | UAV Results | UAV vs.* Standard(in Percentage) | Standard Survey | UAV Results | UAV vs.* Standard(in Percentage) | Standard Survey | UAV Results | UAV vs.* Standard(in Percentage) | |
| MATERIAL | Number of items | Number of items | Number of items | ||||||
| Plastic** | 879 | 182 | 20.71% | 741 | 142 | 19.16% | 1503 | 277 | 18.43% |
| multimaterial | 42 | 6 | 14.29% | 28 | 3 | 10.71% | 70 | 2 | 2.86% |
| Glass | 17 | 12 | 70.59% | 3 | 2 | 66.67% | 10 | 5 | 50.00% |
| Metal | 4 | 3 | 75.00% | 3 | 2 | 66.67% | 17 | 10 | 58.82% |
| Other (Clothes….) | 1 | 0 | 0.00% | 2 | 2 | 100.00% | 1 | 0 | 0.00% |
| Total items | 943 | 203 | 21.53% | 768 | 151 | 19.66% | 1599 | 294 | 18.39% |
| Density (items·/m2) | Density (items·/m2) | Density (items·/m2) | |||||||
| Total density | 0.63 | 0.13 | 20.63% | 0.51 | 0.1 | 19.61% | 1.07 | 0.2 | 18.69% |
| Date | 12 April2019 | 13 July 2019 | 17 January 2020 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Standard Survey (Number of Items) | UAV Results (Number of Items) | UAV vs.* Standard(in Percentage) | Standard Survey | UAV Results (Number of Items) | UAV vs.* Standard(in Percentage) | Standard Survey | UAV Results (Number of Items) | UAV vs.* Standard(in Percentage) | |
| Small (2.5–15 cm) | 859 | 124 | 14.44% | 716 | 103 | 14.39% | 1526 | 240 | 15.73% |
| Medium (15–50 cm) | 67 | 64 | 95.52% | 49 | 46 | 93.88% | 60 | 45 | 75.00% |
| Large (> 50 cm) | 17 | 15 | 88.24% | 3 | 2 | 66.67% | 13 | 9 | 69.23% |
| Total | 943 | 203 | 21.53% | 768 | 151 | 19.66% | 1599 | 294 | 18.39% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merlino, S.; Paterni, M.; Berton, A.; Massetti, L. Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter. Remote Sens. 2020, 12, 1260. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12081260
Merlino S, Paterni M, Berton A, Massetti L. Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter. Remote Sensing. 2020; 12(8):1260. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12081260
Chicago/Turabian StyleMerlino, Silvia, Marco Paterni, Andrea Berton, and Luciano Massetti. 2020. "Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter" Remote Sensing 12, no. 8: 1260. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12081260