SMOS Third Mission Reprocessing after 10 Years in Orbit

 , , and
, , and
Abstract
:1. Introduction
2. Methods
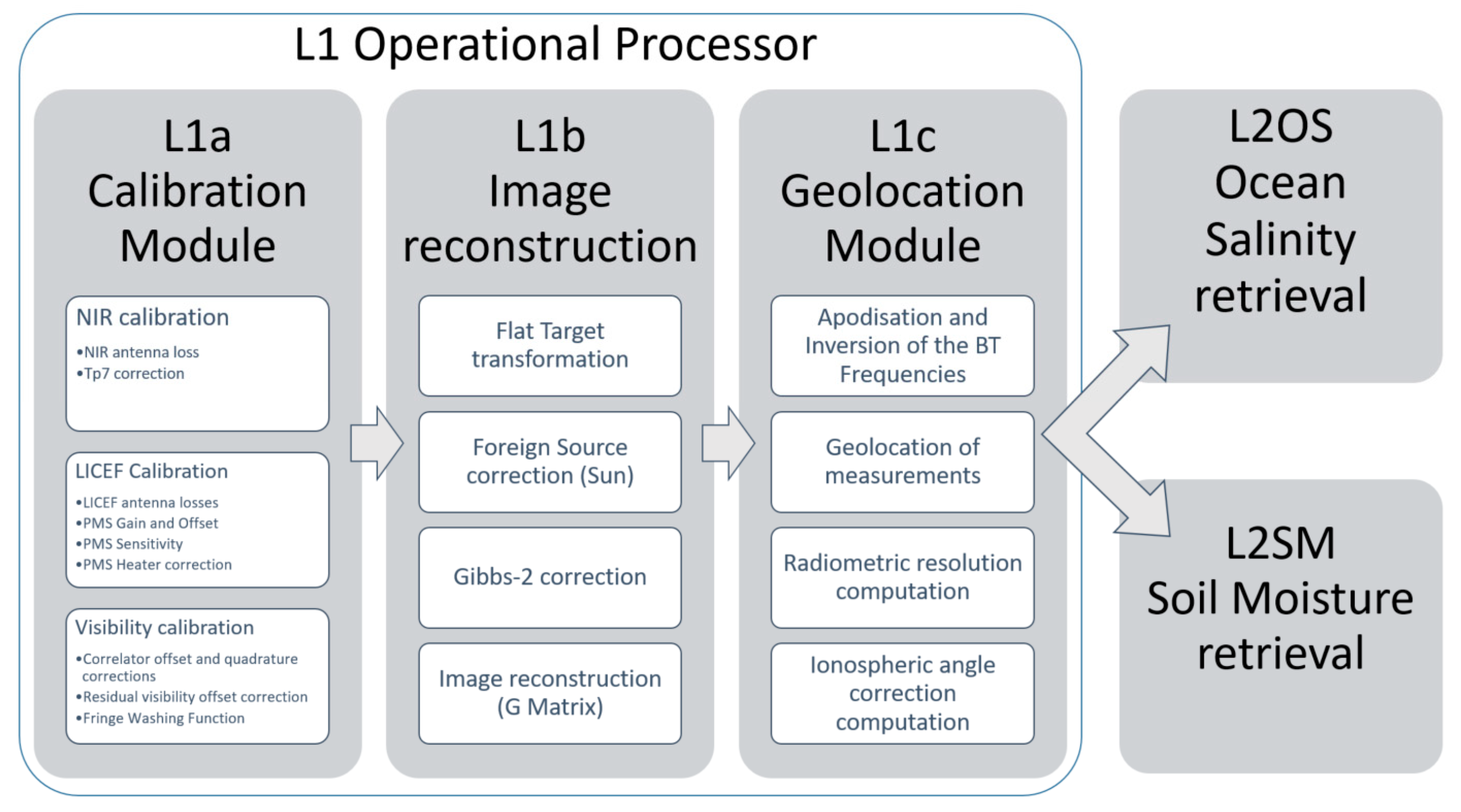
2.1. Changes in Calibration
- -
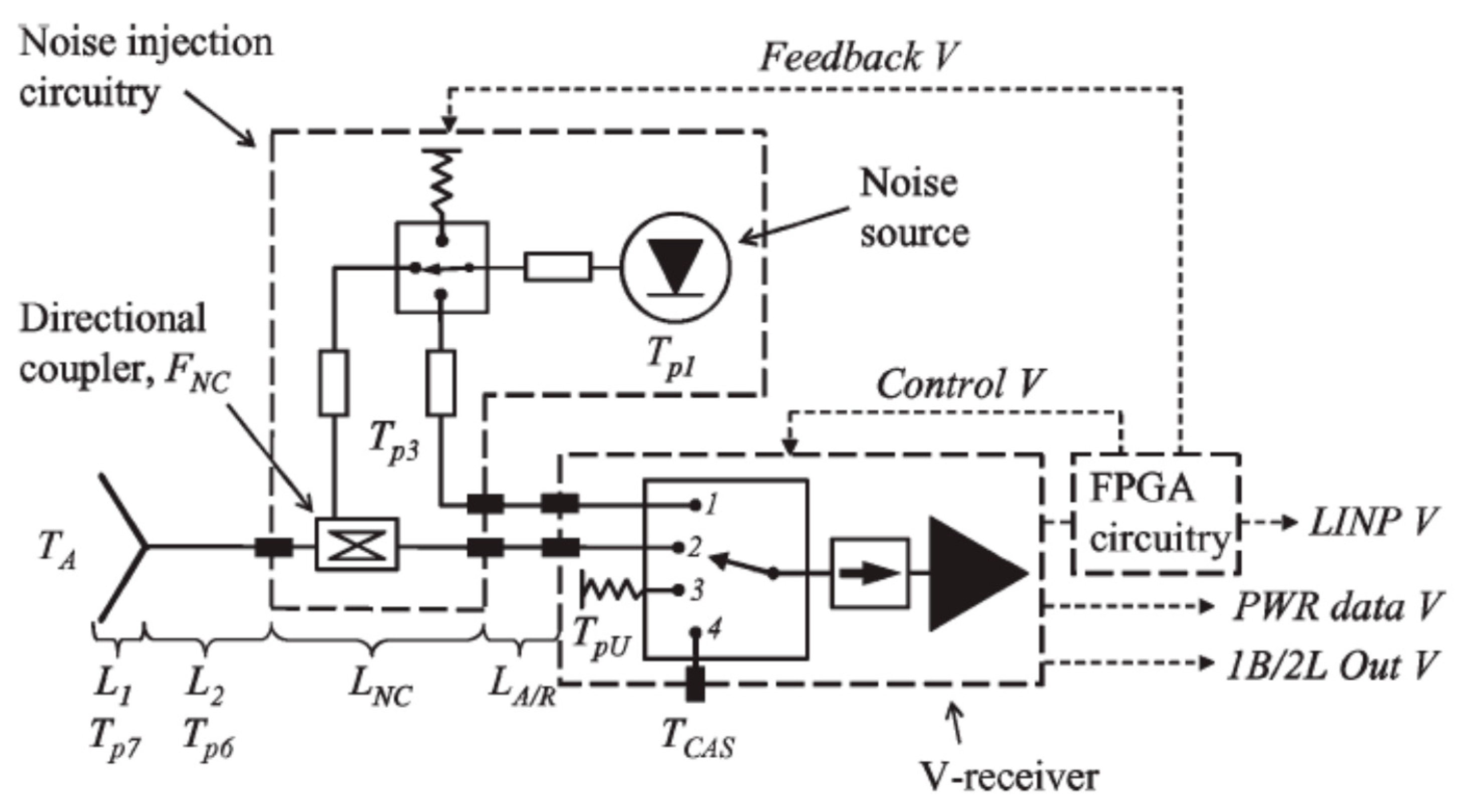
- Noise injection radiometer (NIR) calibration strategy.
- -
- NIR antenna losses.
- -
- Power measurement system (PMS) sensitivity factors.
- -
- PMS heater correction.
- -
- Thermal latency of the temperature sensor in NIR antennas.
2.1.1. NIR Calibration
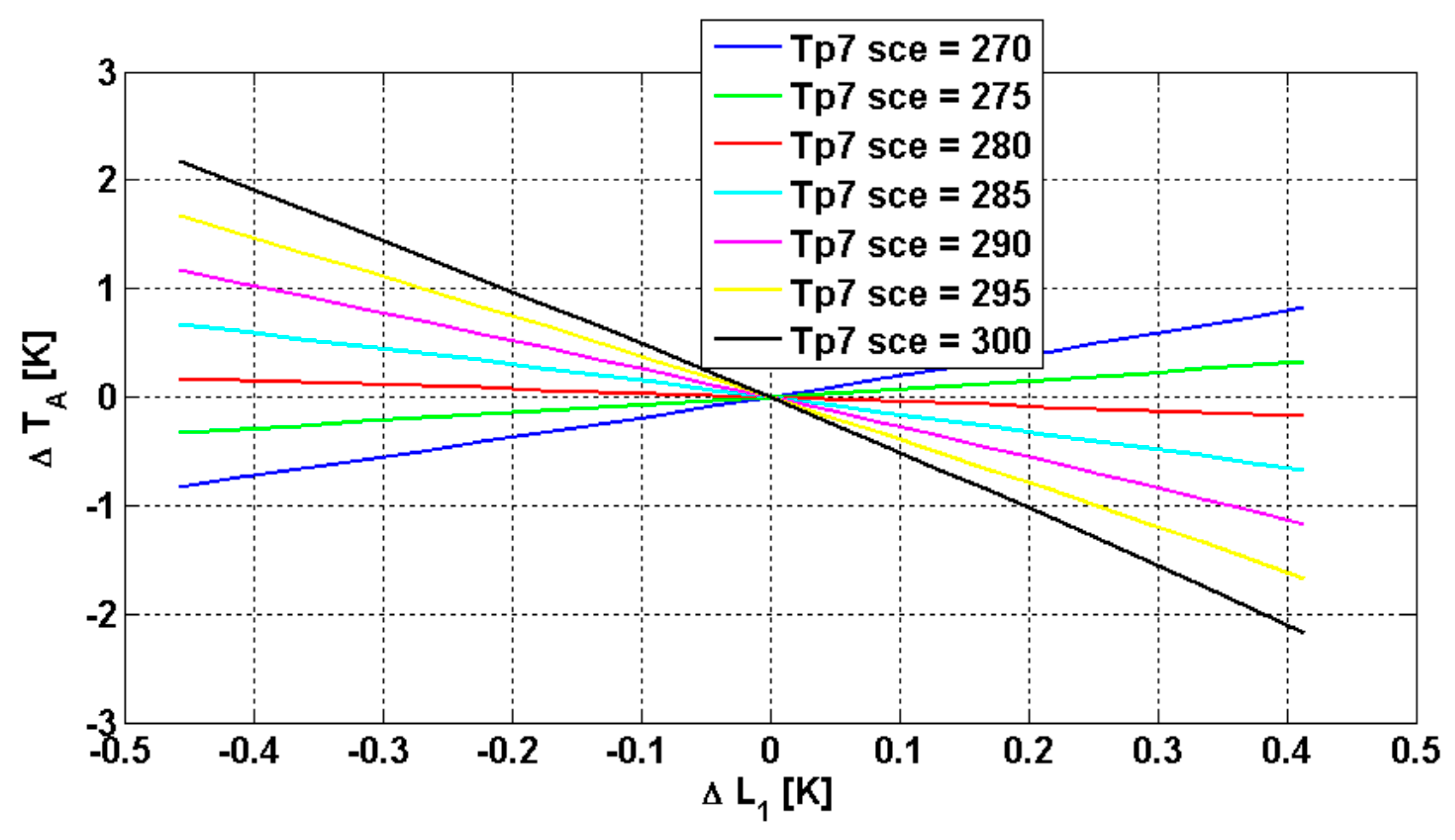
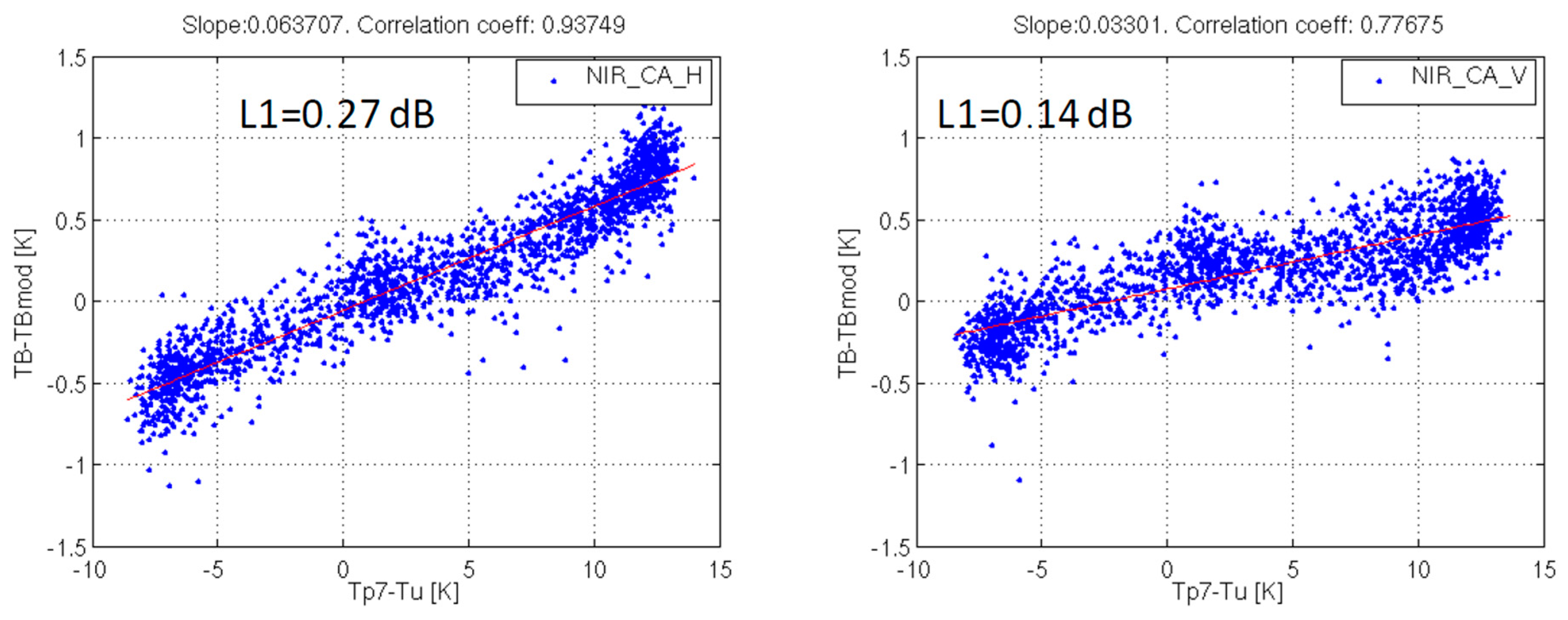
2.1.2. Antenna Losses
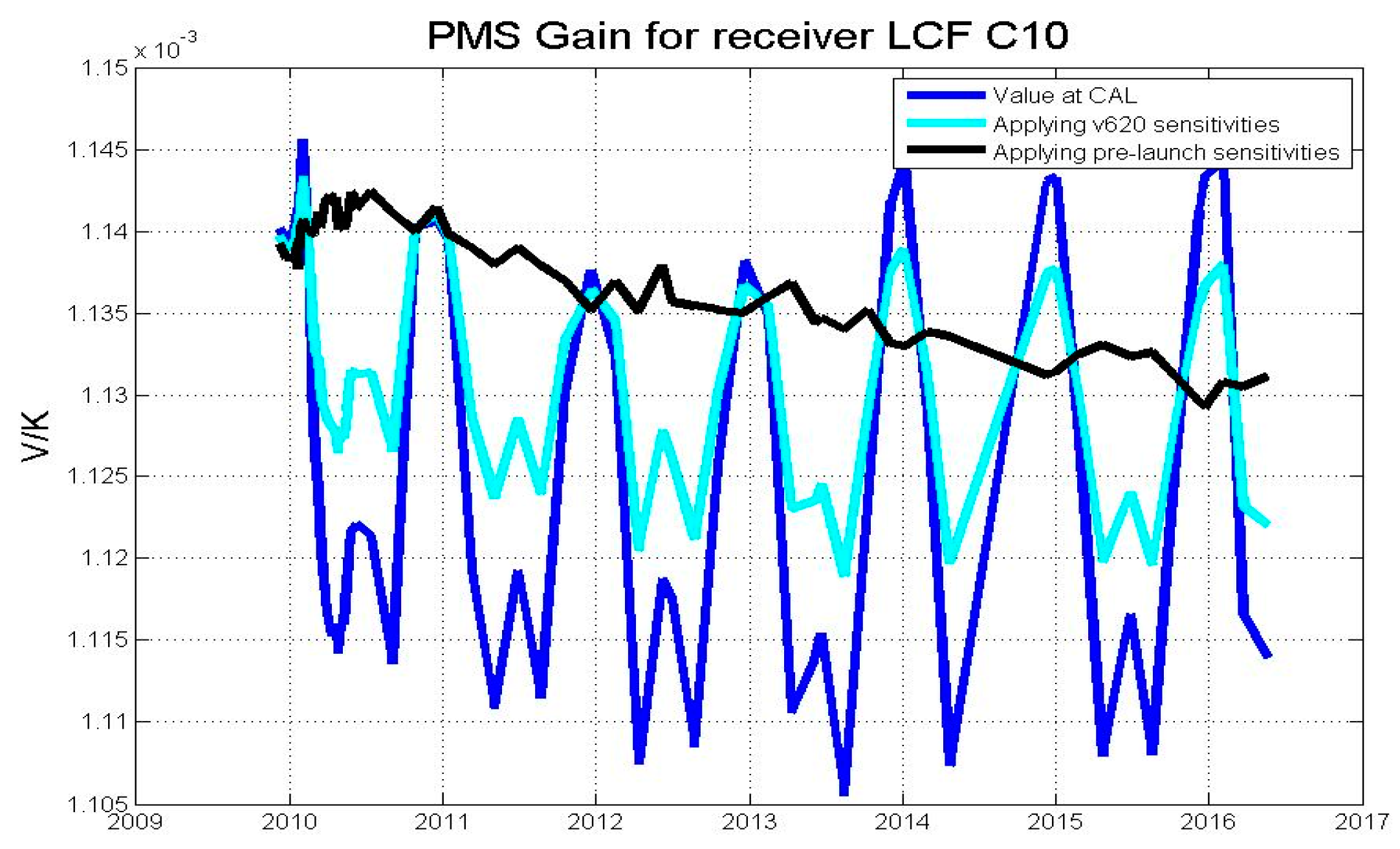
2.1.3. PMS Sensitivities
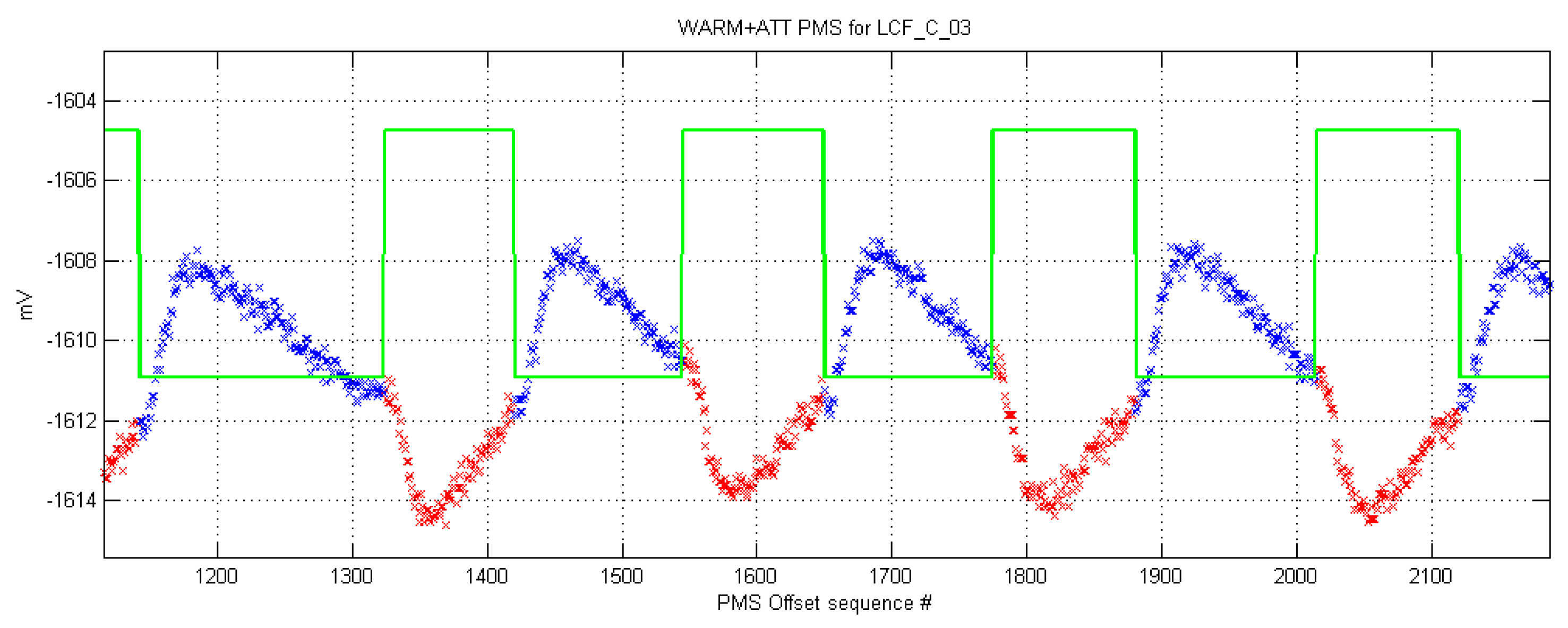
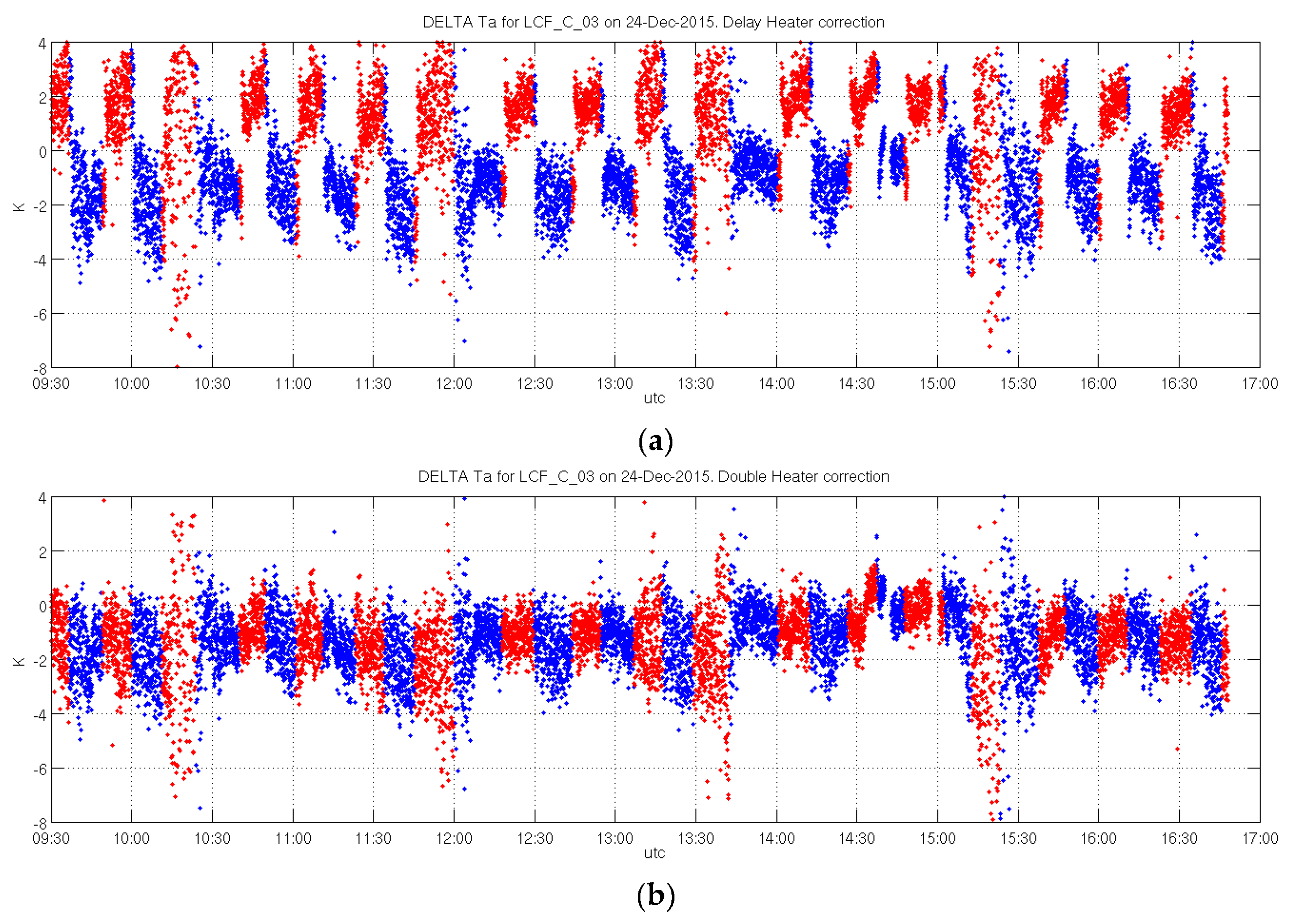
2.1.4. PMS Heater Correction
2.1.5. Antenna Patch Thermistor Correction
2.2. Changes in Image Reconstruction
- -
- Gibbs phenomena correction.
- -
- The use of a sea-ice mask.
- -
- Correction of the Sun’s influence in the images.
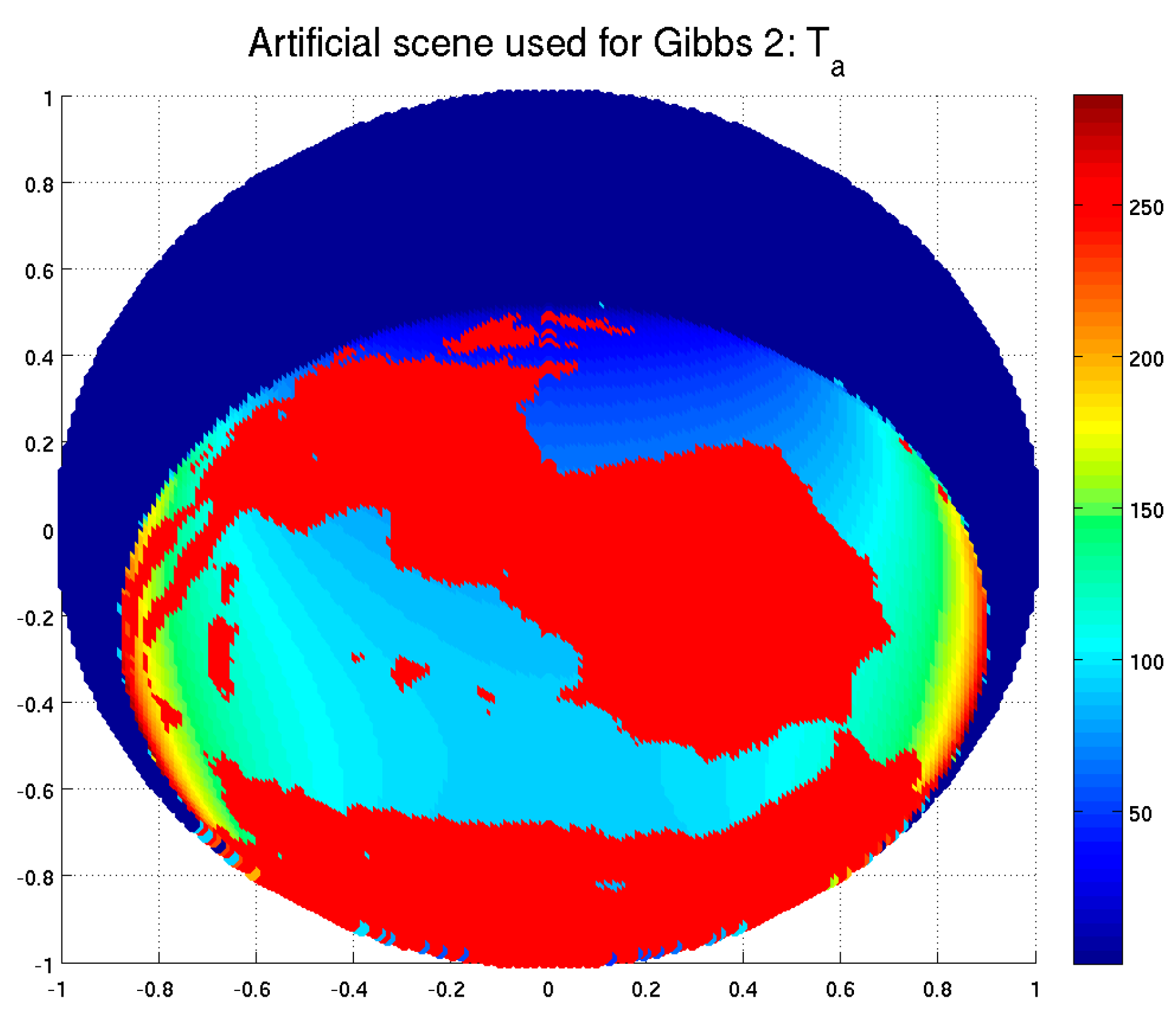
2.2.1. Gibbs-2 Algorithm
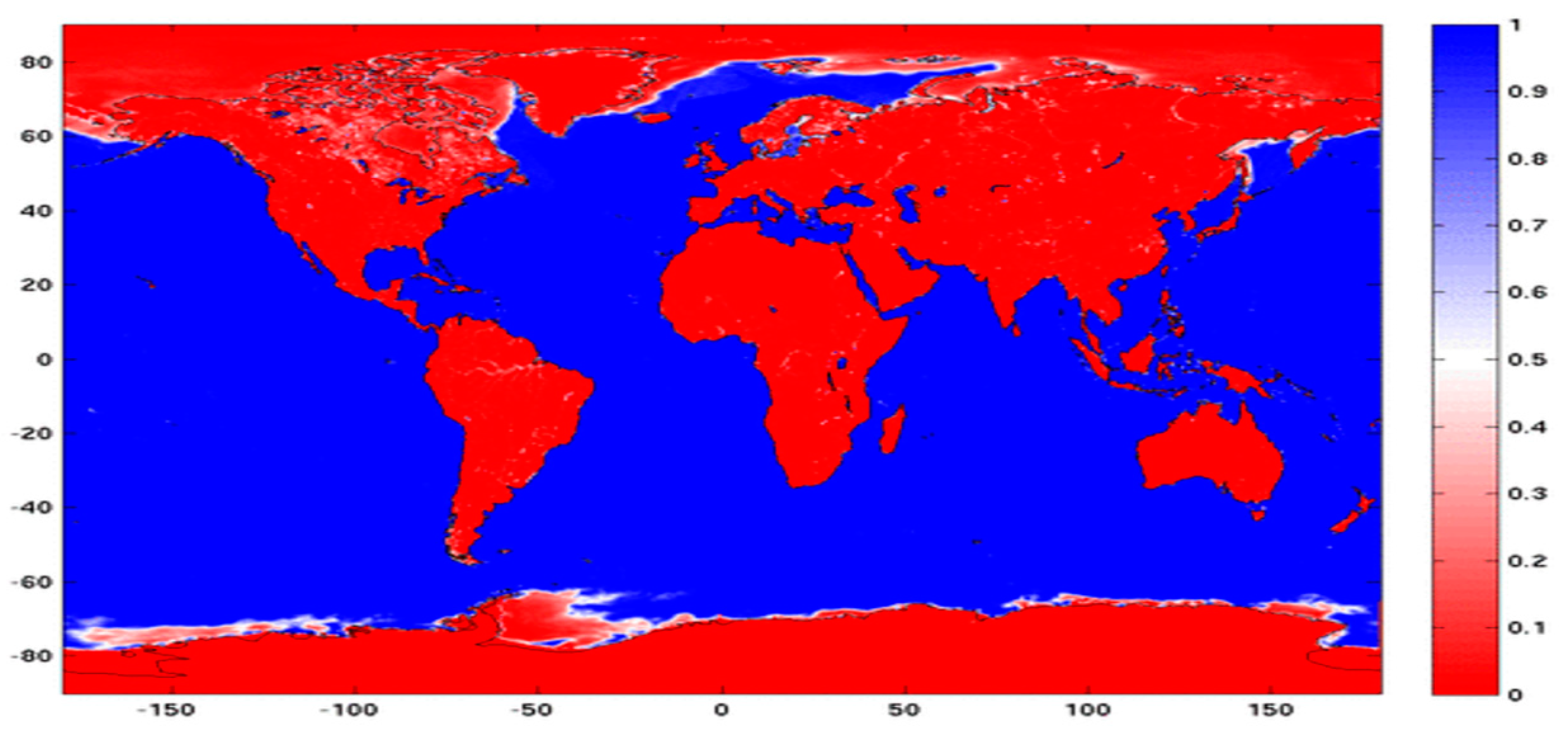
2.2.2. Sea-Ice Mask
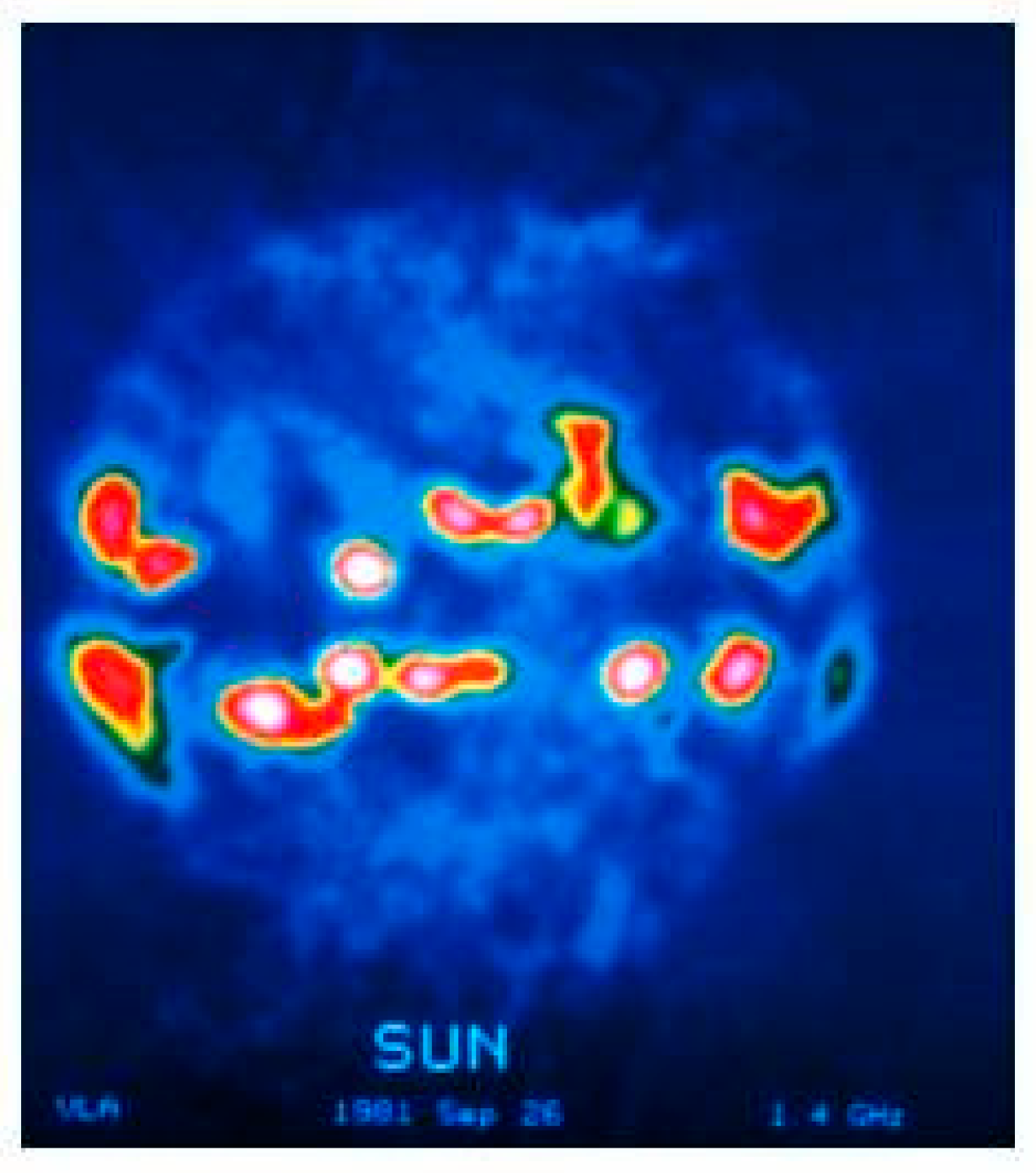
2.2.3. Super-Sampled Sun Correction
- is the inverse Fourier transform of the difference between the measured visibilities and the Gibbs-2 synthetic visibilities;
- represents the average value over the clean ‘o’ pixels surrounding the sun disc and is calculated as the average of the inverse Fourier transform of the difference between the measured visibilities and the Gibbs-2 synthetic visibilities.
- is the first estimate of the Sun temperature, obtained assuming the Sun as a point source.
- w is a weight to be finely tuned to get the best compromise in condition number versus sensitivity (for now fixed at 106).
- nPOS is the number of over-sampled points, fixed to 37 in the L1OP.
- 1,..,,..,n is the number of points polluted by the solar radiation, including the disc of the sun and the tails.
- are the system response functions calculated over the over-sampled grid.
- is the inverse Fourier transform of calculated over the polluted pixel.
- is the set of estimated temperatures for the 37 points of the sun disc. It has been shown in [17] that the solution to this problem is explicit.
2.2.4. Sun Correction in the Back
3. Results and Discussion
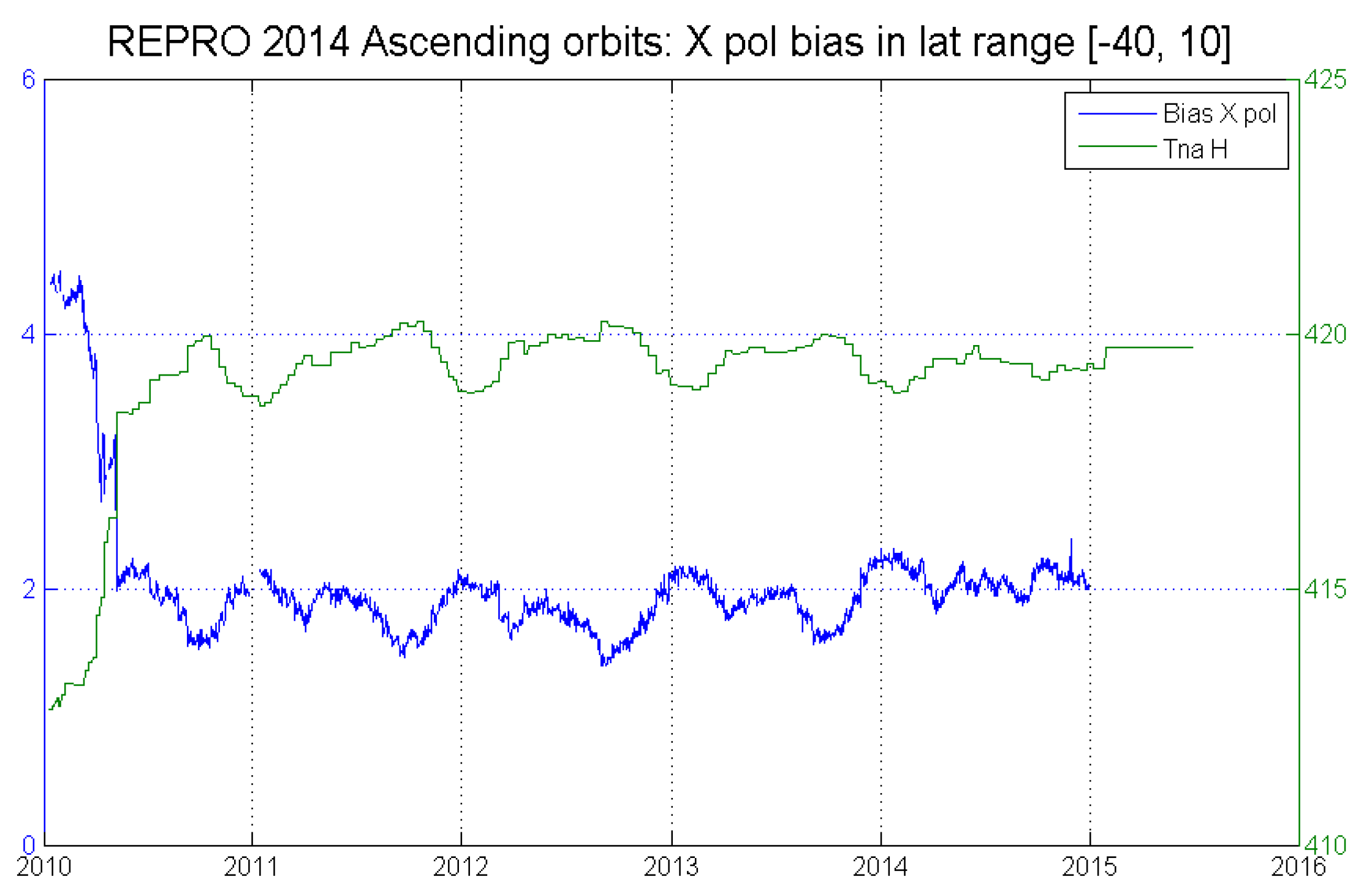
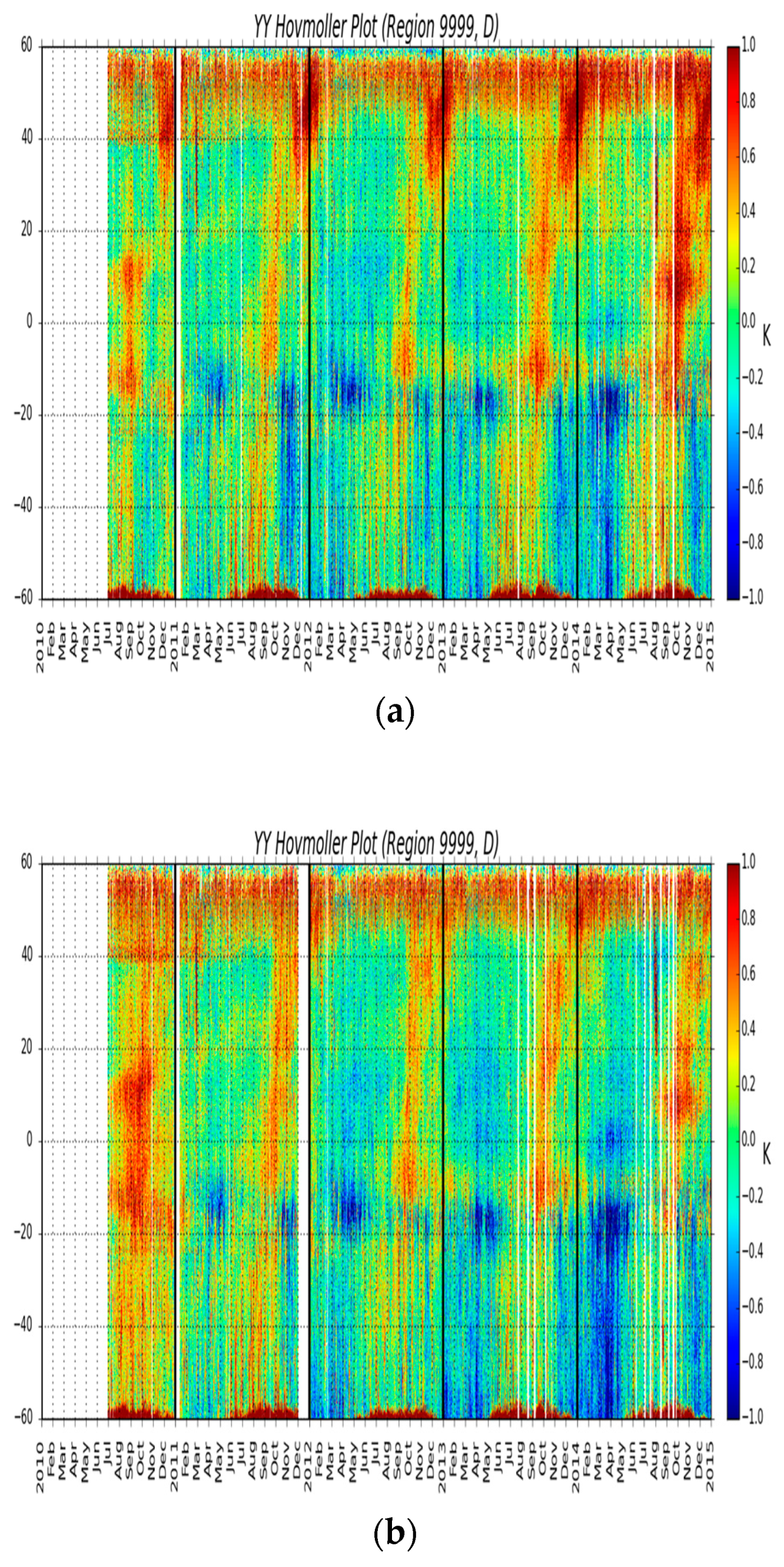
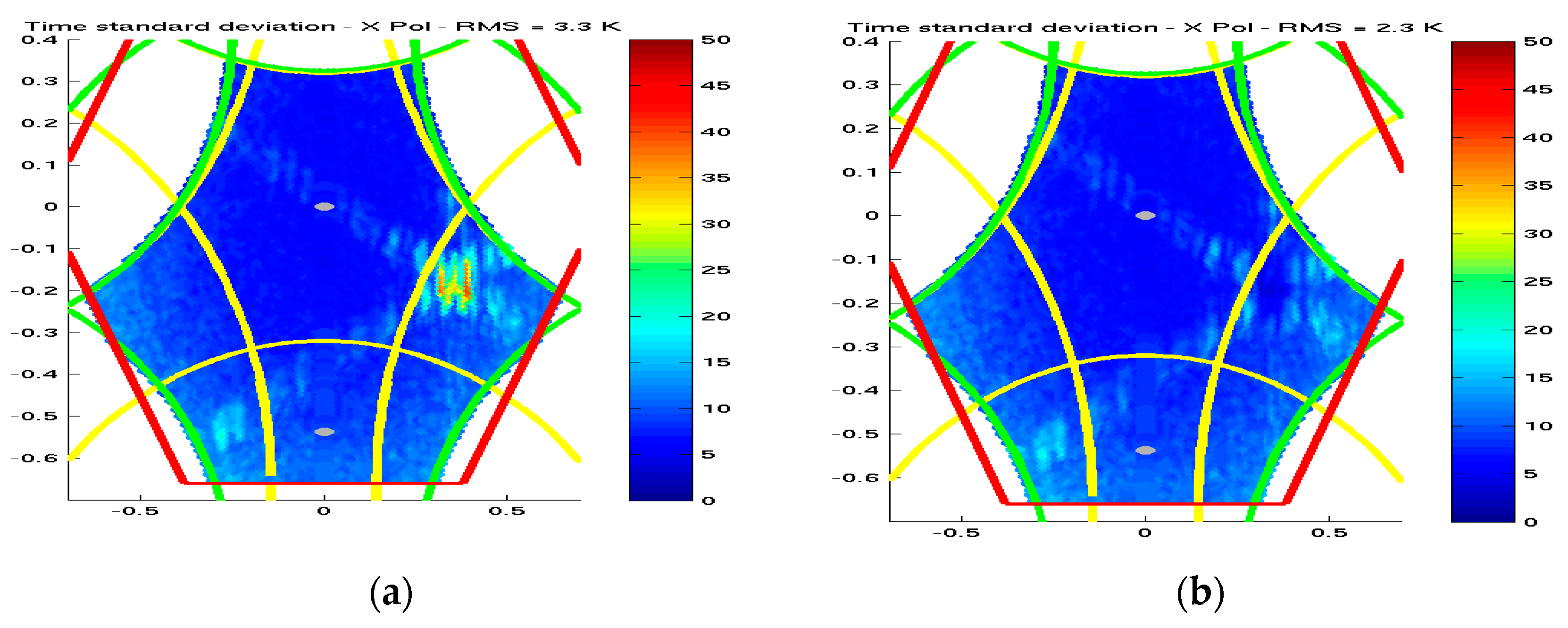
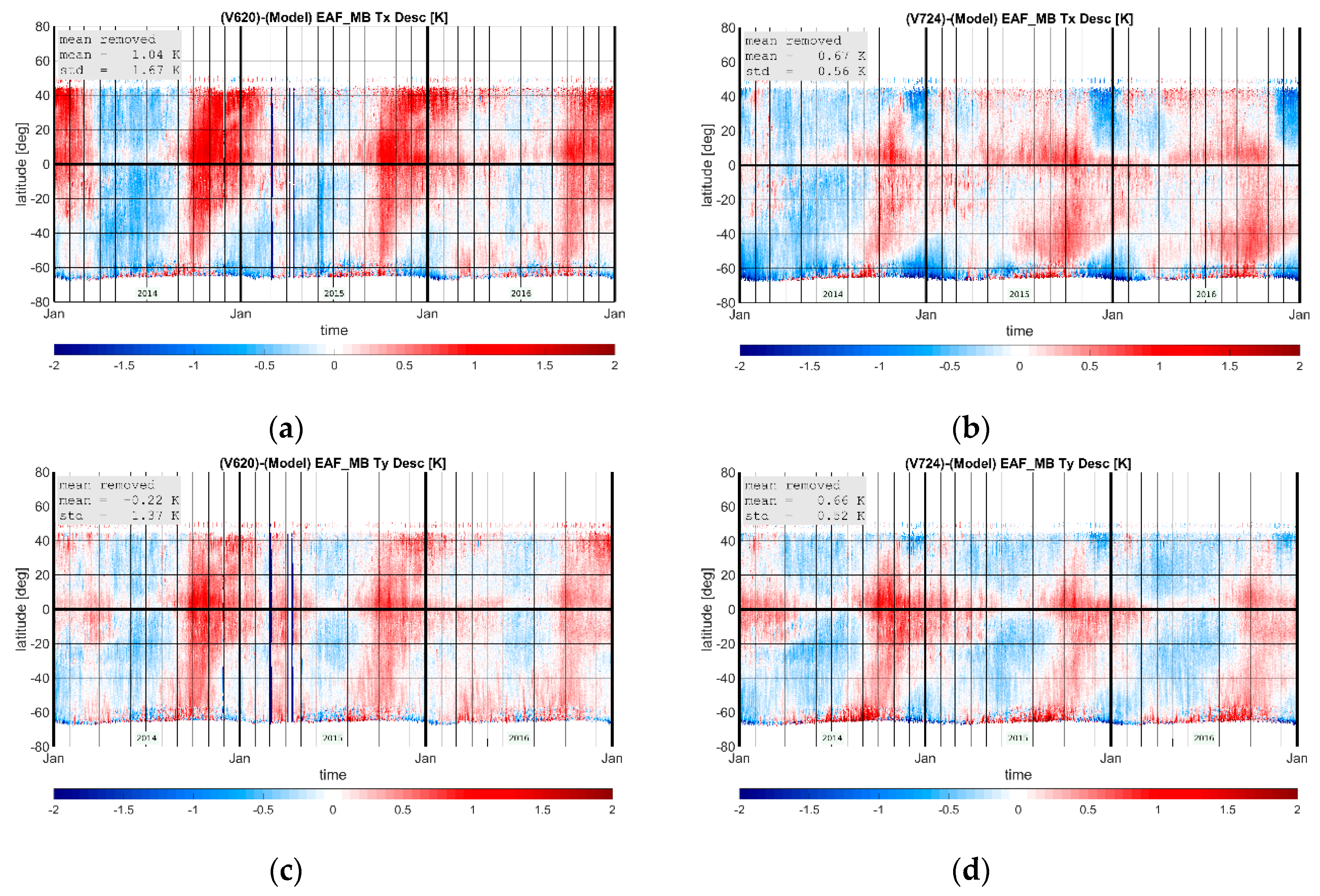
3.1. Orbital and Seasonal Stability
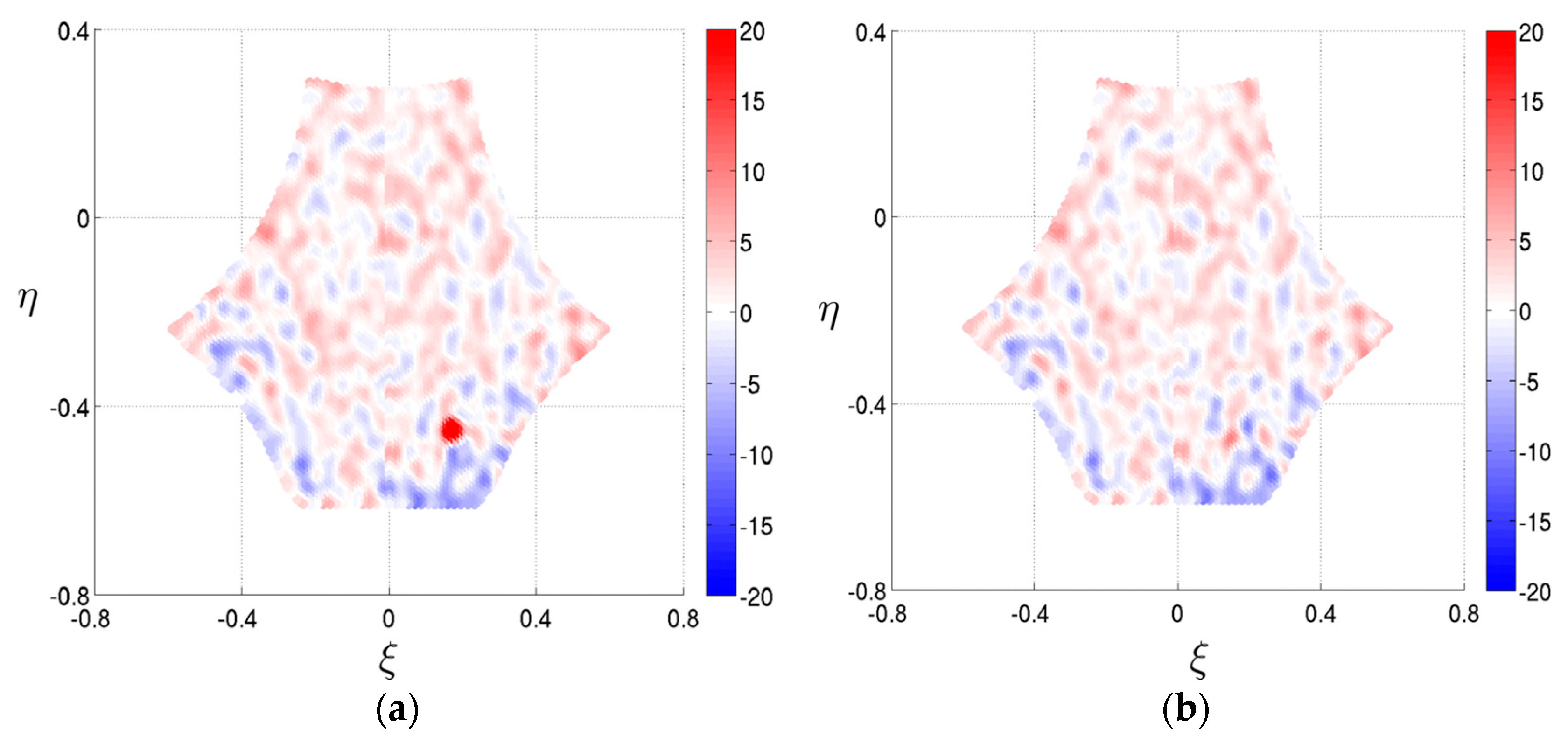
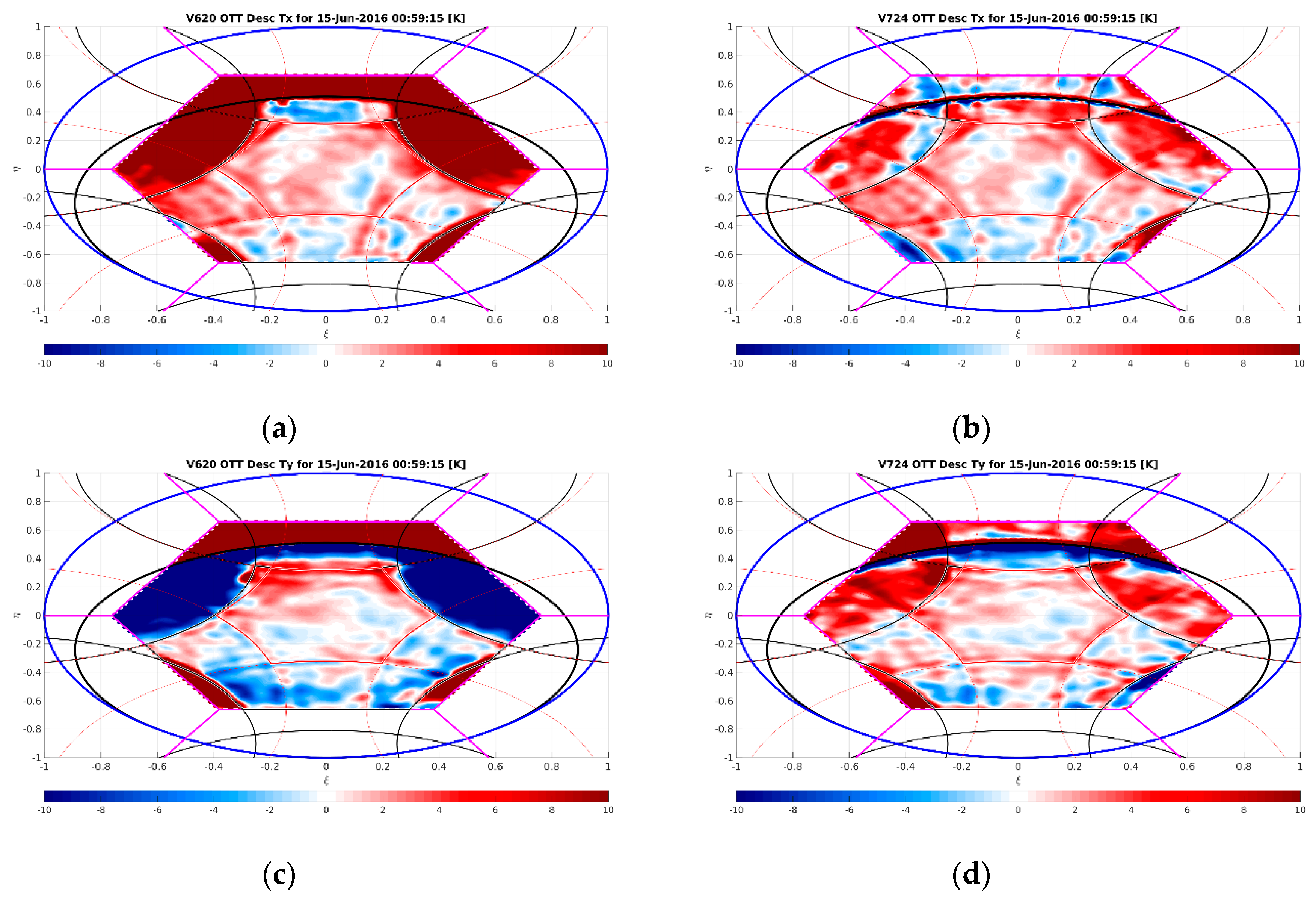
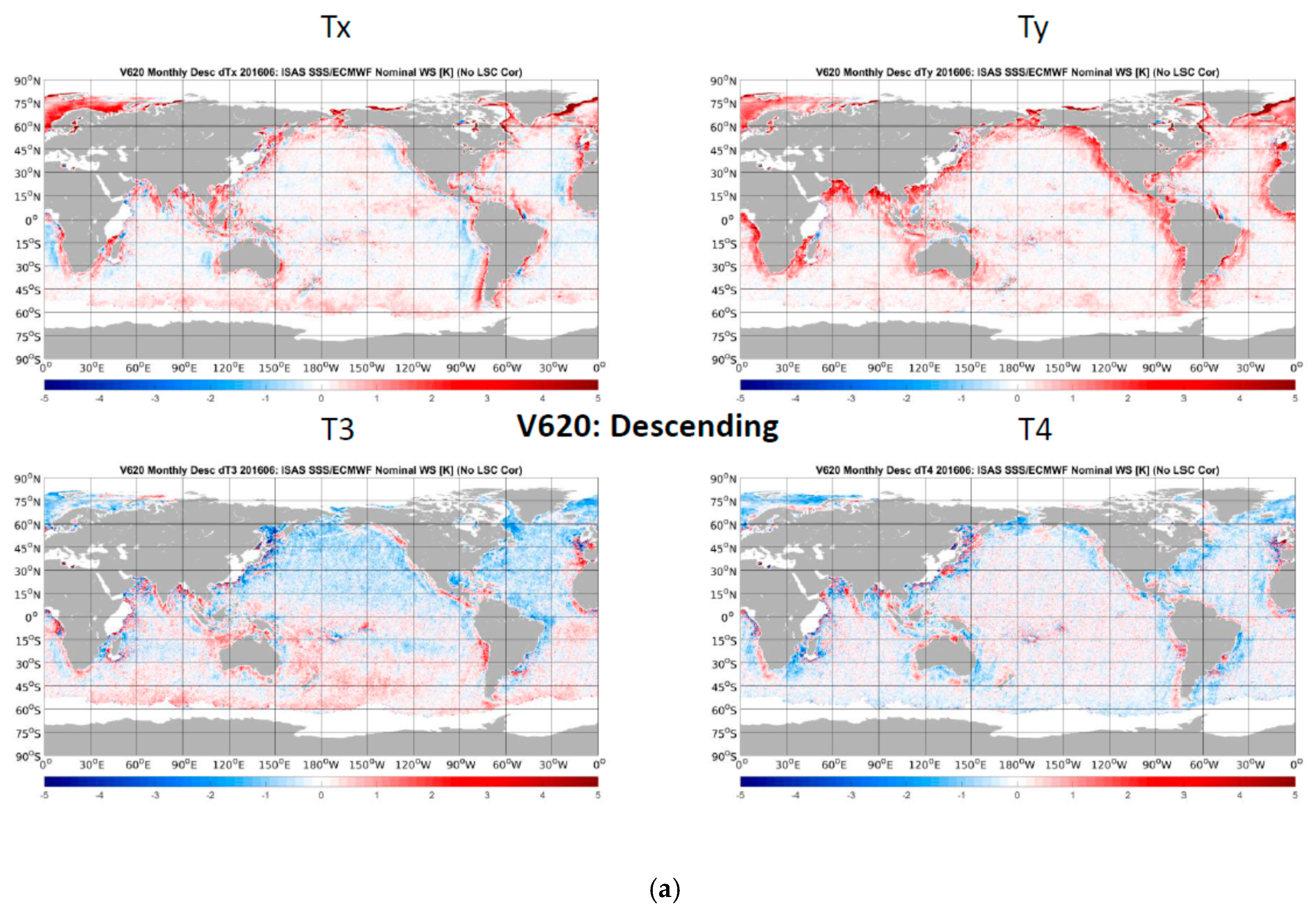
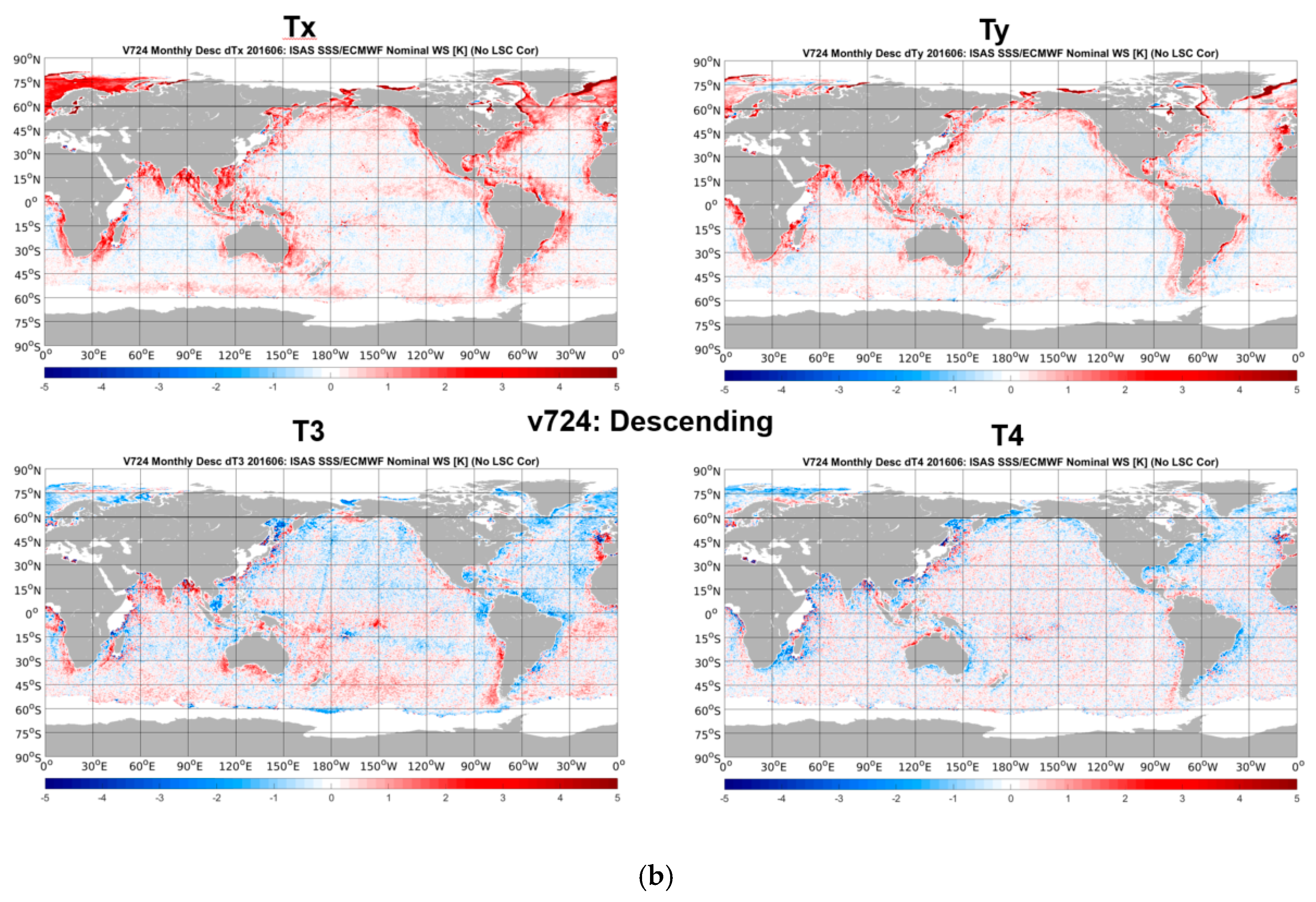
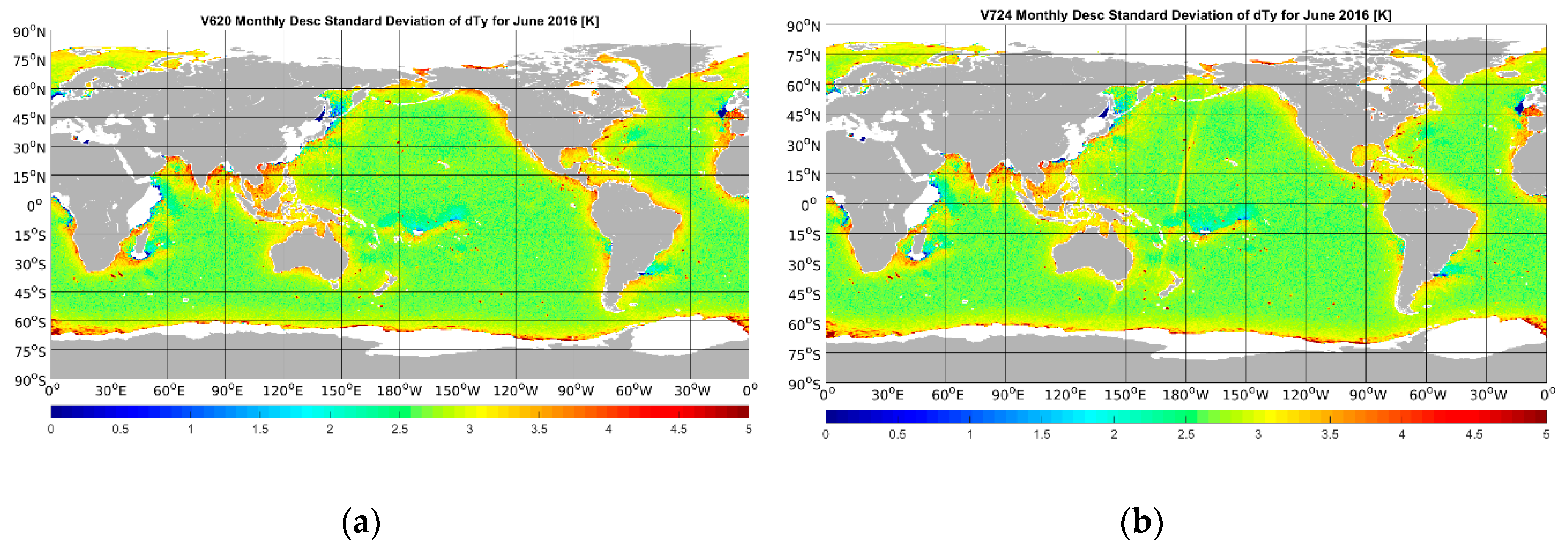
3.2. Spatial Biases
3.3. Land–Sea Contamination
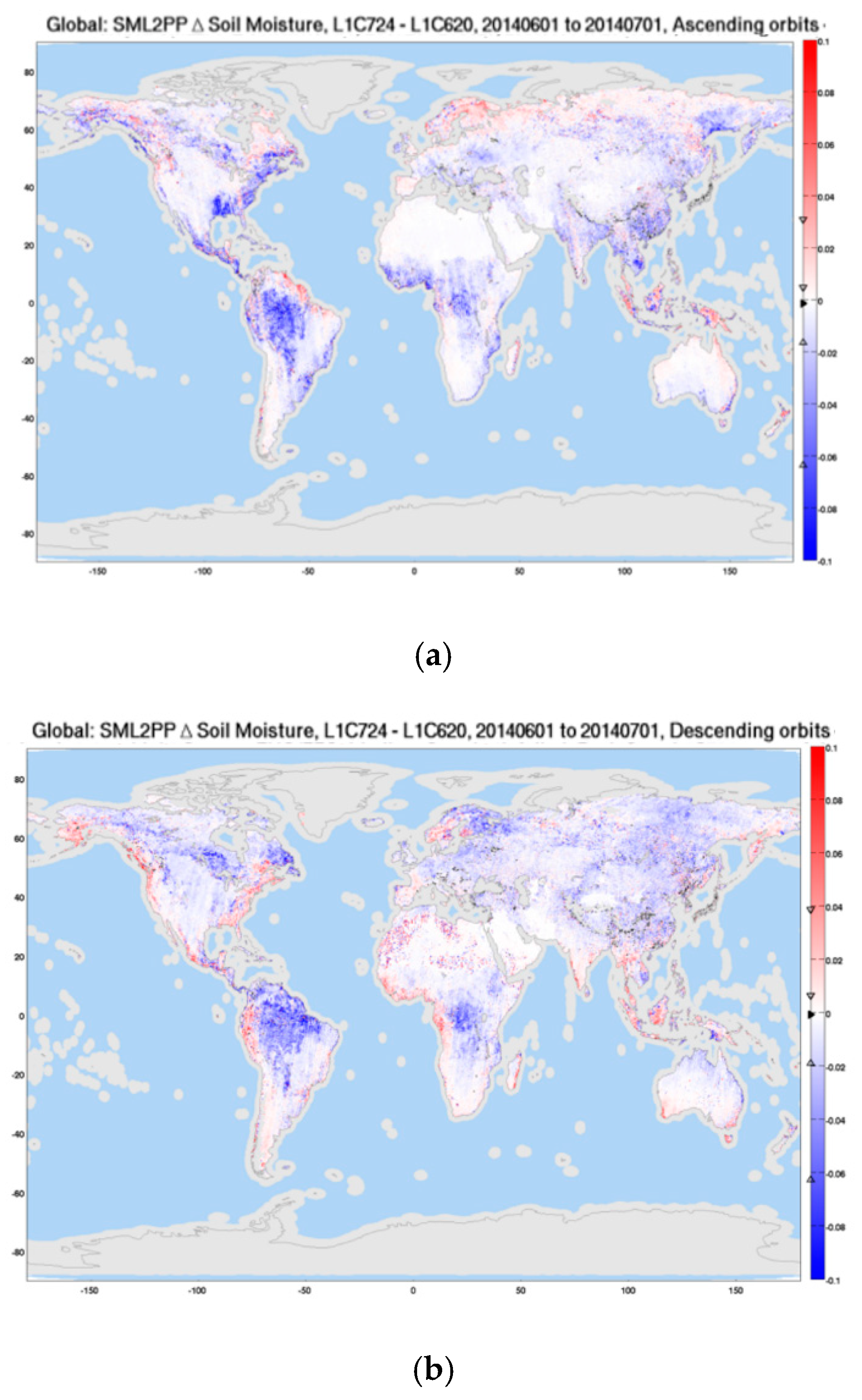
3.4. Impact on Retrieved Soil Moisture and Vegetation Optical Depth (VOD)
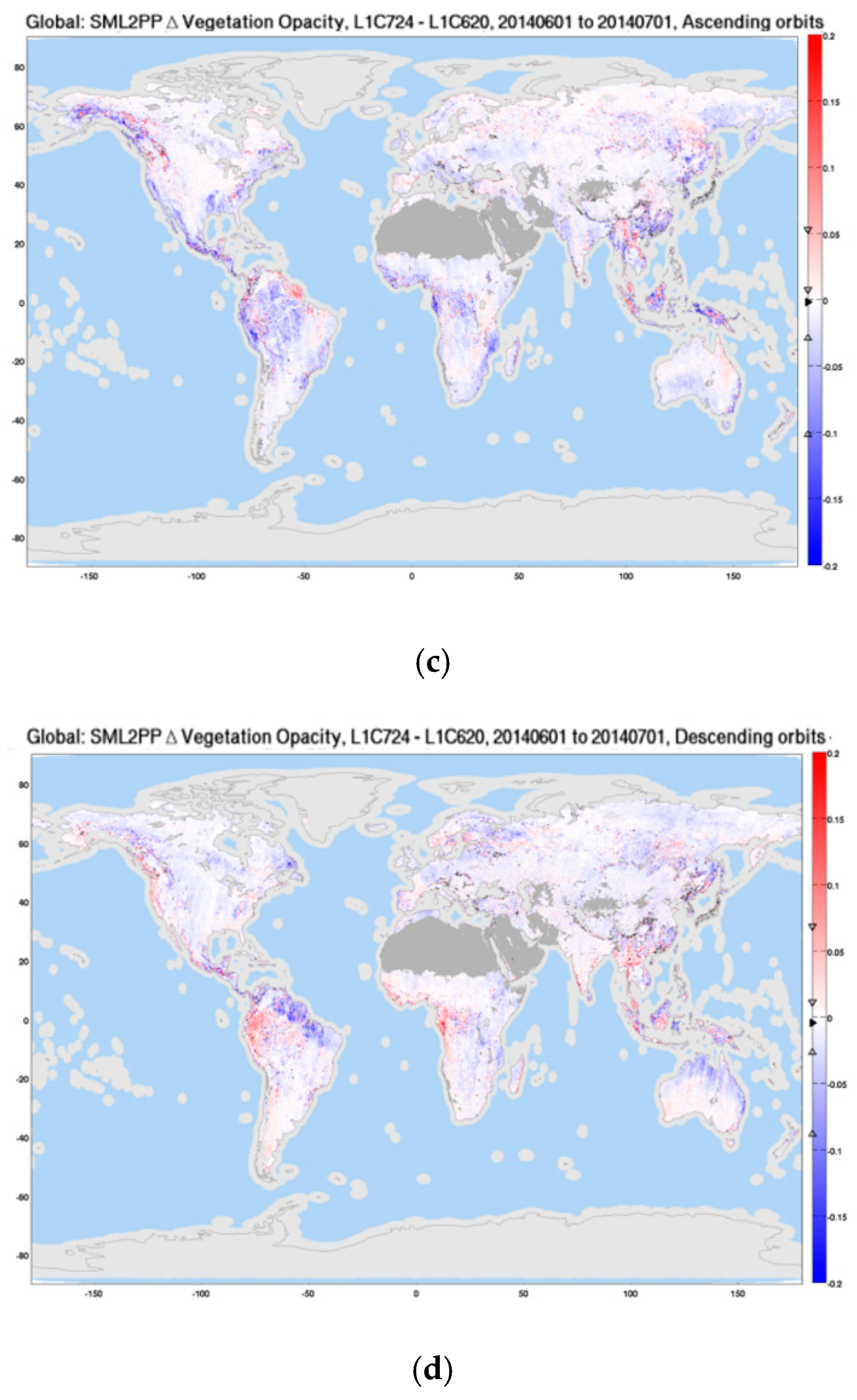
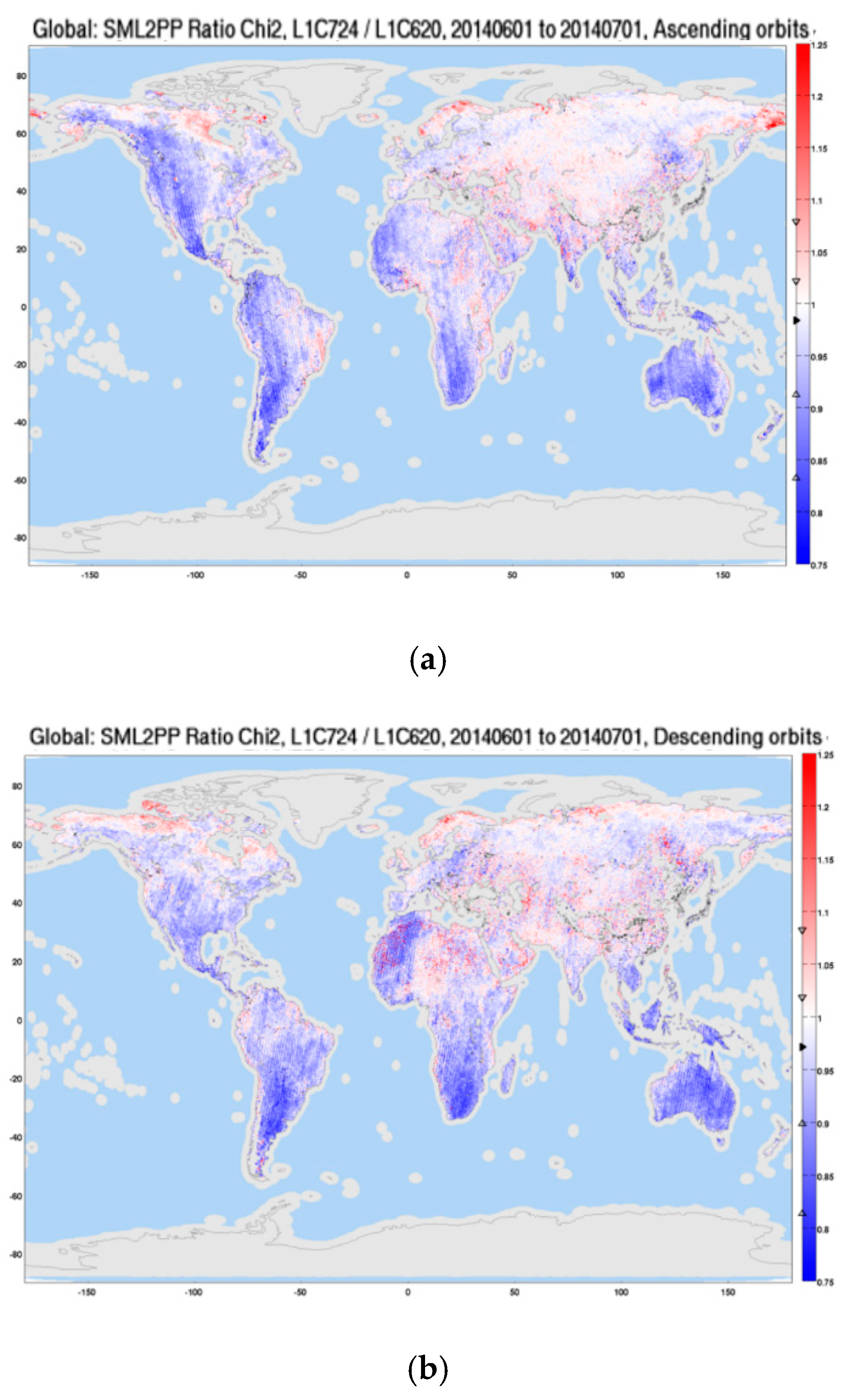
3.4.1. Spatial Maps of Retrieved Soil Moisture and Opacity
3.4.2. Test
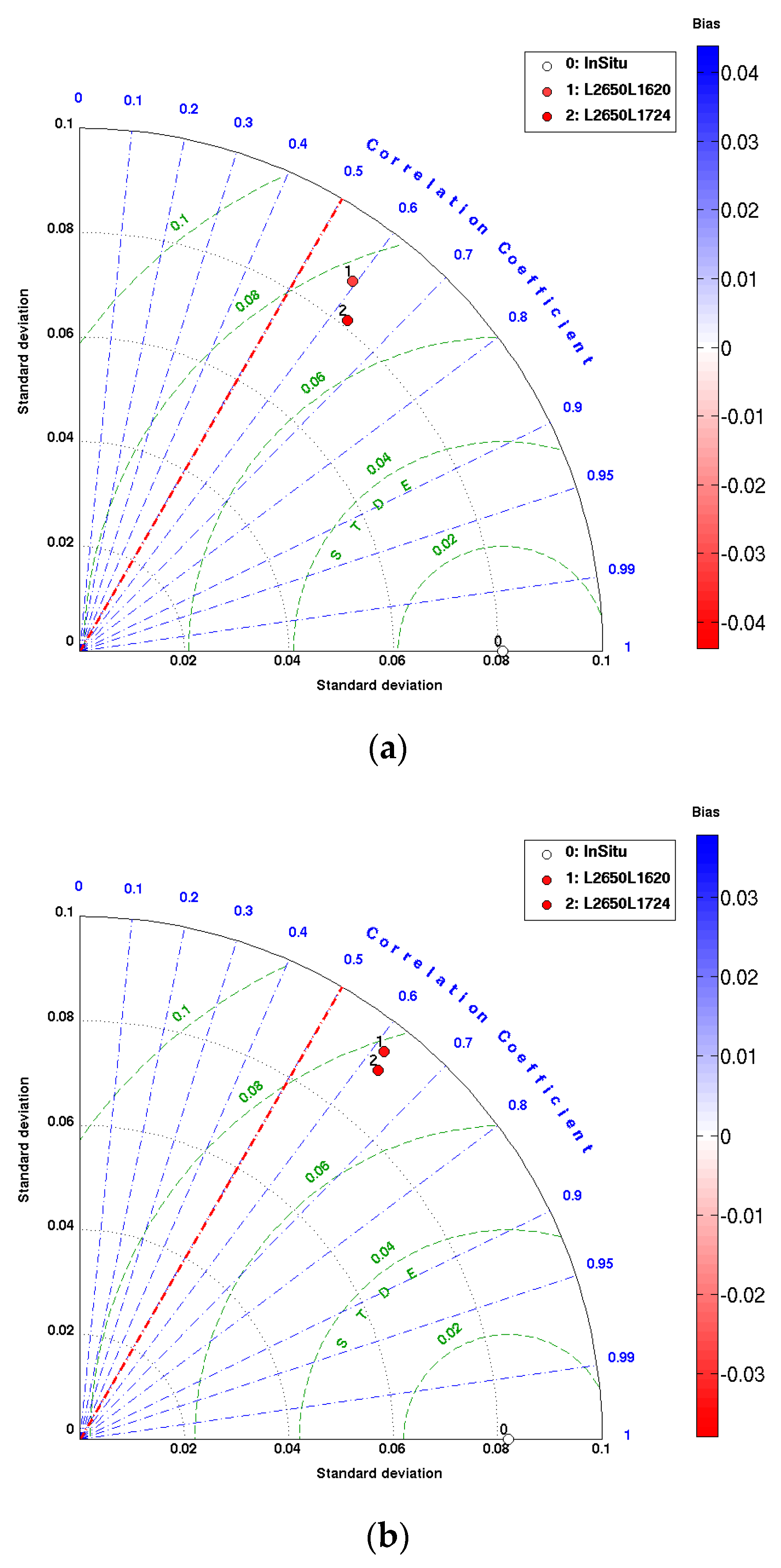
3.4.3. In-Situ Soil Moisture
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Font, J.; Camps, A.; Borges, A.; Martín-Neira, M.; Boutin, J.; Reul, N.; Kerr, Y.H.; Hahne, A.; Mecklenburg, S. SMOS: The challenging sea surface salinity measurement from space. Proc. IEEE 2010, 98, 649–665. [Google Scholar] [CrossRef] [Green Version]
- Mecklenburg, S.; Drusch, M.; Kaleschke, L.; Rodriguez-Fernandez, N.; Reul, N.; Kerr, Y.; Font, J.; Martin-Neira, M.; Oliva, R.; Daganzo-Eusebio, E.; et al. ESA’s Soil Moisture and Ocean Salinity mission: From science to operational applications. Remote Sens. Environ. 2016, 180, 3–18. [Google Scholar] [CrossRef]
- McMullan, K.D.; Brown, M.A.; Martín-Neira, M.; Rits, W.; Ekholm, S.; Marti, J.; Lemanczyk, J. SMOS: The payload. IEEE Trans. Geosci. Remote Sens. 2008, 46, 594–605. [Google Scholar] [CrossRef]
- Brown, M.A.; Torres, F.; Corbella, I.; Colliander, A. SMOS Calibration. IEEE Trans. Geosci. Remote Sens. 2008, 46, 646–658. [Google Scholar] [CrossRef]
- Colliander, A.; Ruokokoski, L.; Suomela, J.; Veijola, K.; Kettunen, J.; Kangas, V.; Aalto, A.; Levander, M.; Greus, H.; Hallikainen, M.T.; et al. Development and Calibration of SMOS Reference Radiometer. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1967–1977. [Google Scholar] [CrossRef]
- SMOS L2 OS Algorithm Theoretical Baseline Document, SO-TN-ARG-GS-0007, Issue 3.13. April 2016. Available online: https://earth.esa.int/documents/10174/1854519/SMOS_L2OS-ATBD (accessed on 5 March 2020).
- Corbella, I.; Torres, F.; Duffo, N.; Durán, I.; Pablos, M.; Martín-Neira, M. Enhanced SMOS amplitude calibration using external target. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2012, Munich, Germany, 22–27 July 2012; IEEE: Munich, Germany, 2012; pp. 2868–2871. [Google Scholar]
- Corbella, I.; Torres, F.; Duffo, N.; Durán, I.; González-Gambau, V.; Oliva, R.; Closa, J.; Martín-Neira, M. Calibration of the MIRAS Radiometers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1633–1646. [Google Scholar] [CrossRef]
- Corbella, I.; Torres, F.; Duffo, N.; Martín-Neira, M.; González-Gambau, V.; Camps, A.; Vall-Llossera, M. On-Ground Characterization of the SMOS Payload. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3123–3133. [Google Scholar] [CrossRef]
- Corbella, I.; Torres, F.; Duffo, N.; González-Gambau, V.; Pablos, M.; Duran, I.; Martín-Neira, M. MIRAS Calibration and Performance: Results from the SMOS In-Orbit Commissioning Phase. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3147–3155. [Google Scholar] [CrossRef]
- Kainulainen, J.; Oliva, R.; Closa, J.; Barbosa, J.; Martin-Neira, M. In-Orbit Calibration of the Thermal Model of SMOS Noise Injection Radiometer to Account for Eclipse Time Bias, Unpublished Work.
- Duran, I.; Lin, W.; Corbella, I.; Torres, F.; Duffo, N.; Martín-Neira, M. SMOS floor error impact and migation on ocean imaging. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1437–1440. [Google Scholar] [CrossRef]
- Corbella, I.; Torres, F.; Wu, L.; Duffo, N.; Duran, I.; Martín-Neira, M. Spatial biases analysis and mitigation methods in SMOS images. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 2013, Melbourne, Australia, 21–26 July 2013; IEEE: Melbourne, Australia, 2013; pp. 3145–3418. [Google Scholar]
- Khazâal, A.; Richaume, P.; Cabot, F.; Anterrieu, E.; Mialon, A.; Kerr, Y.H. Improving the Spatial Bias Correction Algorithm in SMOS Image Reconstruction Processor: Validation of Soil Moisture Retrievals with in Situ Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 277–290. [Google Scholar] [CrossRef]
- Dulk, G.A.; Gary, D.E. The sun at 1.4 GHz: Intensity and polarization. Astron. Astrophys. 1983, 124, 103–107, ISSN 0004-6361. [Google Scholar]
- Khazaal, A.; Cabot, F.; Anterrieu, E.; Kerr, Y.H. A new direct Sun correction algorithm for the Soil Moisture and Ocean Salinity Space Mission. IEEE J. Sel. Top. Remote Sens. (JSTARS) 2020, 13, 1164–1173. [Google Scholar] [CrossRef]
- Khazaal, A.; Anterrieu, E.; Cabot, F.; Kerr, Y.H. Impact of Direct Solar Radiations Seen by the Back–Lobes Antenna Patterns of SMOS on the Retrieved Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3079–3086. [Google Scholar] [CrossRef]
- Camps, A.; Vall-Llossera, M.; Duffo, N.; Zapata, M.; Corbella, I.; Torres, F.; Barrena, V. Sun effects in 2-D aperture synthesis radiometry imaging and their cancelation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1161–1167. [Google Scholar] [CrossRef]
- Camps, A.; Vall-llossera, M.; Torres, F.; Corbella, I.; Duffo, N. Sun Self-Estimation Algorithm; Technical Report, SMOSP3-UPC-TN-0002 v1.0; Polytechnical University of Catalunya: Barcelona, Spain, 2007. [Google Scholar]
- Martín-Neira, M.; Oliva, R.; Corbella, I.; Torres, F.; Duffo, N.; Durán, I.; Kainulainen, J.; Closa, J.; Zurita, A.; Cabot, F.; et al. SMOS instrument performance and calibration after six years in orbit. Remote Sens. Environ. 2016, 180, 19–39, ISSN 0034-4257. [Google Scholar] [CrossRef]
- Oliva, R.; Martin-Neira, M.; Corbella, I.; Torres, F.; Kainulainen, J.; Tenerelli, J.E.; Cabot, F.; Martin-Porqueras, F. SMOS Calibration and Instrument Performance after One Year in Orbit. IEEE Trans. Geosci. Remote Sens 2013, 51, 654–670. [Google Scholar] [CrossRef]
- Meirold-Mautner, I.; Mugerin, C.; Vergely, J.L.; Spurgeon, P.; Rouffi, F.; Meskini, N. SMOS ocean salinity performance and TB bias correction. In Proceedings of the EGU General Assembly, Vienna, Austria, 19–24 April 2009. [Google Scholar]
- Tenerelli, J.; Reul, N. Analysis of L1PP Calibration Approach Impacts in SMOS TB and 3-Days SSS Retrievals over the Pacific Using an Alternative Ocean Target Transformation Applied to L1OP Data; Tech. Rep. IFREMER/CLS: Brest, France, 2010. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | Ascending | Descending |
|---|---|---|
| X polarisation | −0.97 | −0.88 |
| Y polarisation | −0.96 | −0.74 |
| Orbit Pass | Polarization | Second Mission Reprocessing | Third Mission Reprocessing |
|---|---|---|---|
| Ascending | X | 1.73 K | 0.57 K |
| Y | 1.41 K | 0.35 K | |
| Descending | X | 1.67 K | 0.56 K |
| Y | 1.37 K | 0.52 K |
| Ascending Orbits | Descending Orbits | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| L1OP | R | bias | STDD | RMSD | #data | R | bias | STDD | RMSD | #data |
| v620 | 0.59 (0.016) | −0.031 (0.004) | 0.076 (0.004) | 0.083 (0.004) | 38943 | 0.62 (0.017) | −0.034 (0.004) | 0.078 (0.005) | 0.085 (0.004) | 42963 |
| v724 | 0.063 (0.014) | −0.044 (0.004) | 0.070 (0.004) | 0.082 (0.004) | 40108 | 0.63 (0.014) | −0.038 (0.004) | 0.075 (0.004) | 0.084 (0.004) | 44099 |
| Descending Orbits | ||||||||
|---|---|---|---|---|---|---|---|---|
| L1OP | ||||||||
| v620 | 0.167 (0.004) | 0.198 (0.004) | 0.088 (0.004) | 0.081 (0.005) | 0.171 (0.004) | 0.205 (0.004) | 0.094 (0.004) | 0.082 (0.005) |
| v724 | 0.155 (0.004) | 0.198 (0.004) | 0.081 (0.004) | 0.081 (0.004) | 0.167 (0.004) | 0.205 (0.004) | 0.091 (0.004) | 0.082 (0.004) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliva, R.; Martín-Neira, M.; Corbella, I.; Closa, J.; Zurita, A.; Cabot, F.; Khazaal, A.; Richaume, P.; Kainulainen, J.; Barbosa, J.; et al. SMOS Third Mission Reprocessing after 10 Years in Orbit. Remote Sens. 2020, 12, 1645. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101645
Oliva R, Martín-Neira M, Corbella I, Closa J, Zurita A, Cabot F, Khazaal A, Richaume P, Kainulainen J, Barbosa J, et al. SMOS Third Mission Reprocessing after 10 Years in Orbit. Remote Sensing. 2020; 12(10):1645. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101645
Chicago/Turabian StyleOliva, Roger, Manuel Martín-Neira, Ignasi Corbella, Josep Closa, Albert Zurita, François Cabot, Ali Khazaal, Philippe Richaume, Juha Kainulainen, Jose Barbosa, and et al. 2020. "SMOS Third Mission Reprocessing after 10 Years in Orbit" Remote Sensing 12, no. 10: 1645. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12101645