Comparison of Smartphone and Drone Lidar Methods for Characterizing Spatial Variation in PAI in a Tropical Forest


Abstract
:
1. Introduction
2. Materials and Methods
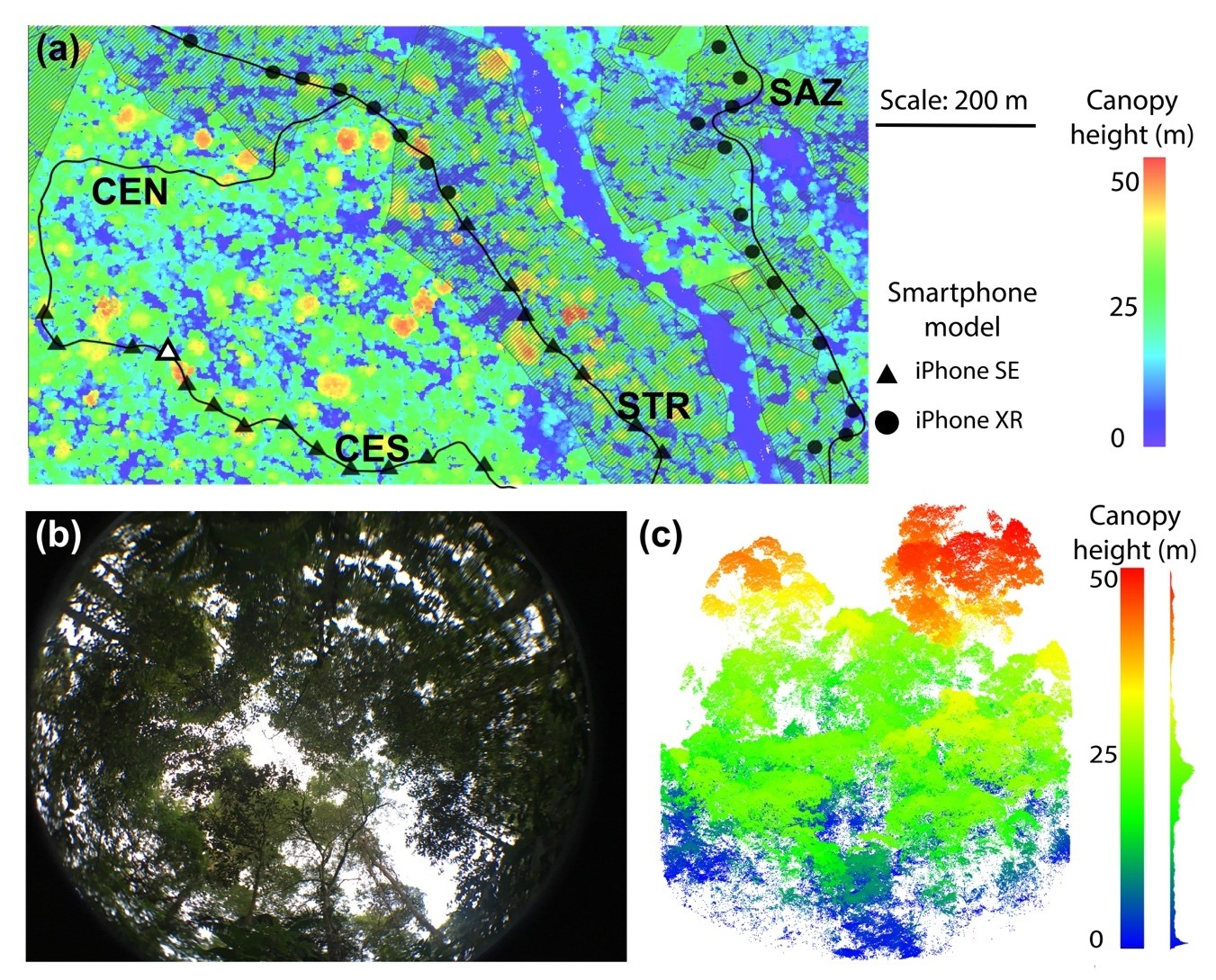
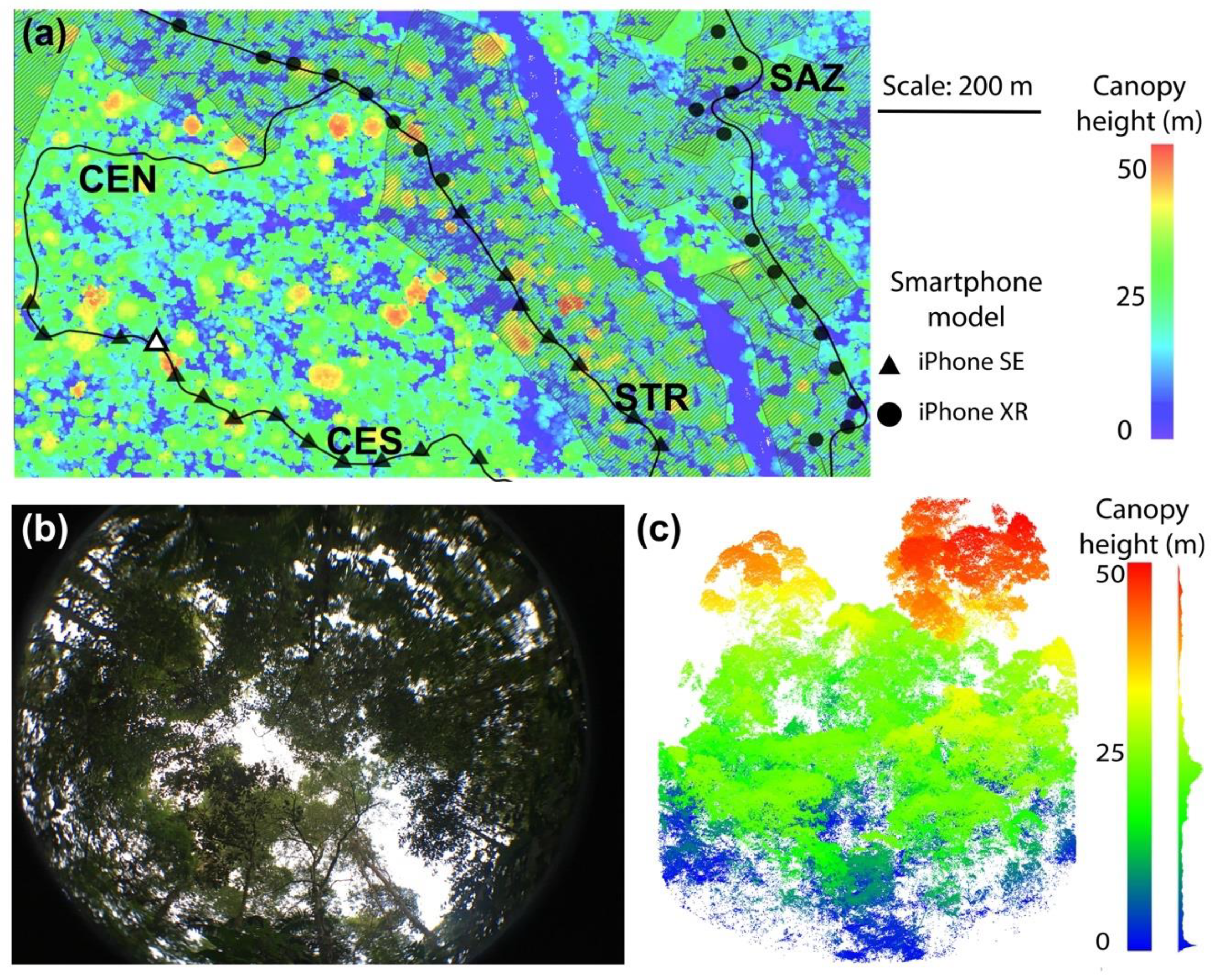
2.1. Study Area
2.2. Lidar Data Acquisition and PAIeff Calculation
2.3. Hemispherical Image Acquisition and PAIeff Calculation
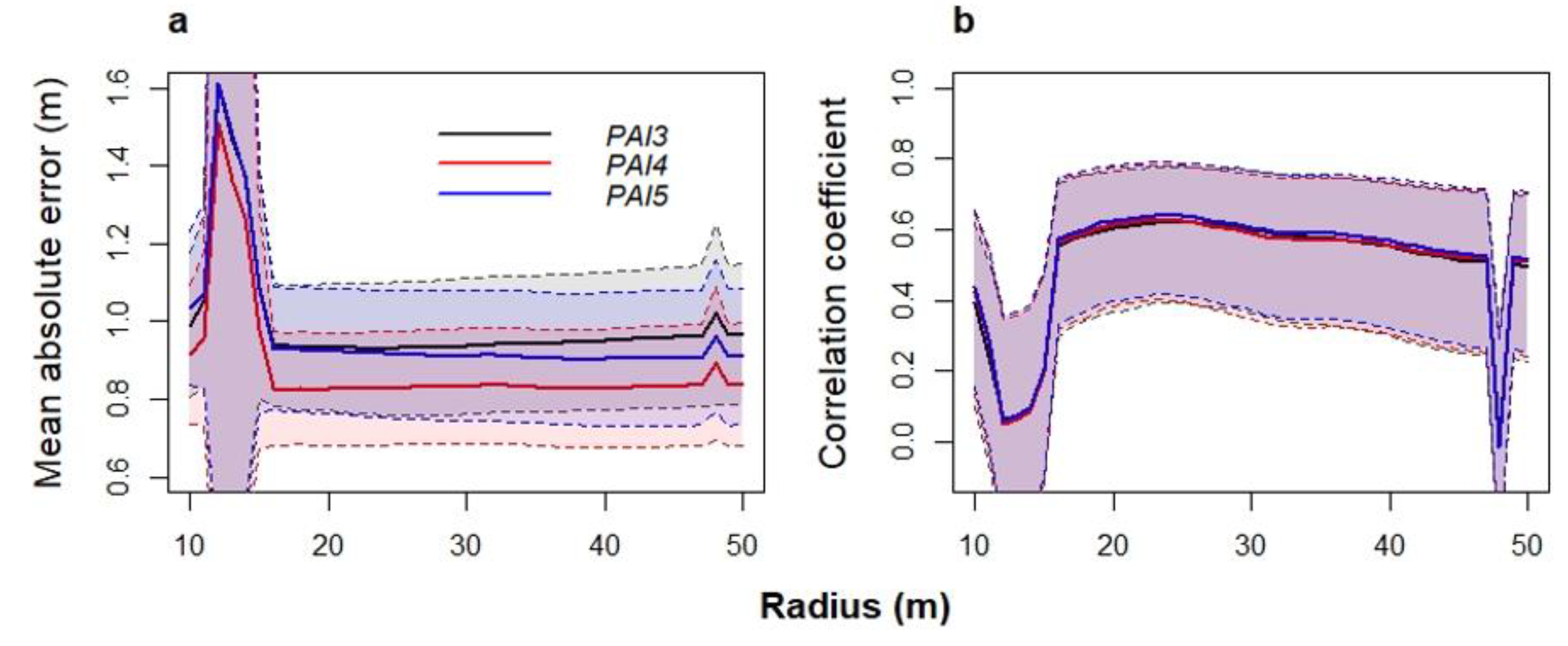
2.4. Optimization of Lidar Sample Radius
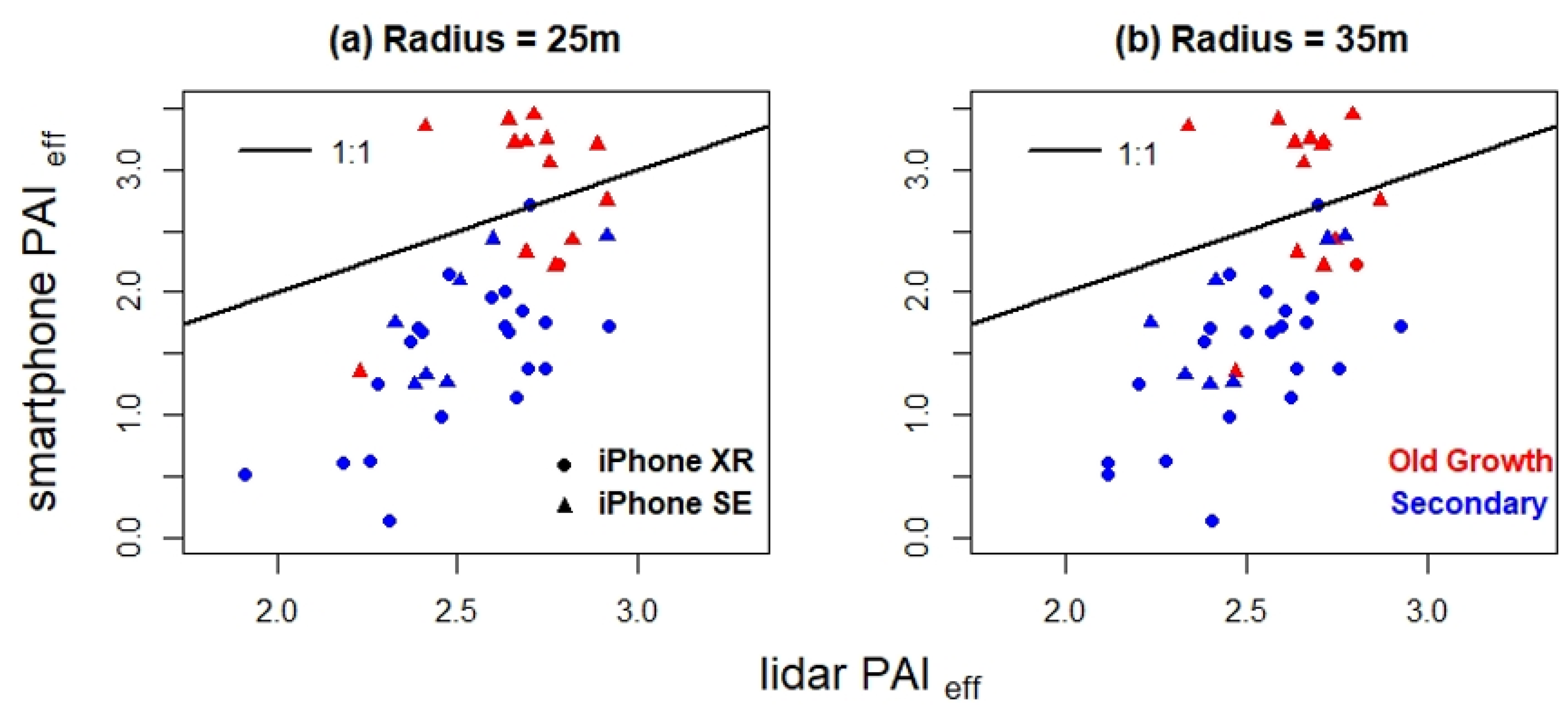
2.5. Comparing Old Growth and Secondary Forests
2.6. Final Comparison of Lidar and Smartphone PAIeff
- Model 1: Smartphone PAIeff ~ Lidar PAIeff
- Model 2: Smartphone PAIeff ~ Lidar PAIeff + Phone model
- Model 3: Smartphone PAIeff ~ Lidar PAIeff + Forest type
- Model 4: Smartphone PAIeff ~ Lidar PAIeff + Phone model + Forest type
3. Results
3.1. Correlation and MAE as a Function of Lidar Radius
3.2. Differences in Old Growth versus Secondary Growth Forest
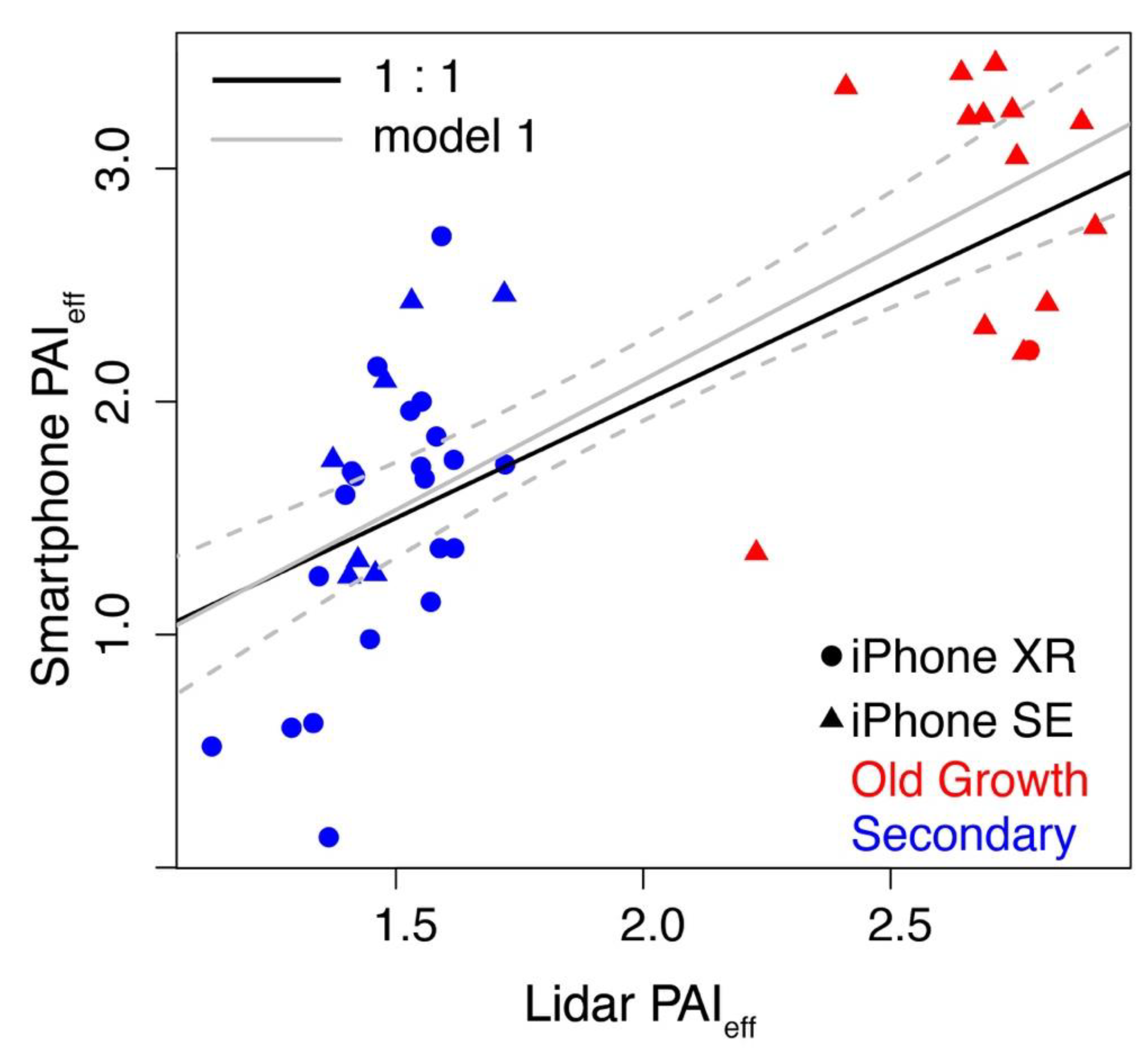
3.3. Final Comparison of Lidar and Smartphone PAIeff
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Clark, D.A.; Asao, S.; Fisher, R.; Reed, S.; Reich, P.B.; Ryan, M.G.; Wood, T.E.; Yang, X. Reviews and Syntheses: Field Data to Benchmark the Carbon Cycle Models for Tropical Forests. Biogeosciences 2017, 14, 4663–4690. [Google Scholar] [CrossRef] [Green Version]
- Doughty, C.E.; Goulden, M.L. Seasonal Patterns of Tropical Forest Leaf Area Index and CO2 Exchange. J. Geophys. Res. Biogeosci. 2009, 114, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Herbert, D.A.; Fownes, J.H. Phosphorus Limitation of Forest Leaf Area and Net Primary Production on a Highly Weathered Soil. Biogeochemistry 1995, 29, 223–235. [Google Scholar] [CrossRef]
- Stark, S.C.; Enquist, B.J.; Saleska, S.R.; Leitold, V.; Schietti, J.; Longo, M.; Alves, L.F.; Camargo, P.B.; Oliveira, R.C. Linking Canopy Leaf Area and Light Environments with Tree Size Distributions to Explain Amazon Forest Demography. Ecol. Lett. 2015, 18, 636–645. [Google Scholar] [CrossRef]
- Tang, H.; Dubayah, R. Light-Driven Growth in Amazon Evergreen Forests Explained by Seasonal Variations of Vertical Canopy Structure. Proc. Natl. Acad. Sci. USA 2017, 114, 2640–2644. [Google Scholar] [CrossRef] [Green Version]
- Watson, D.J. Comparative Physiological Studies on the Growth of Field Crops: I. Variation in Net Assimilation Rate and Leaf Area between Species and Varieties, and within and between Years. Ann. Bot. 1947, 11, 41–76. [Google Scholar] [CrossRef]
- Asner, G.P.; Scurlock, J.M.O.; Hicke, J.A. Global Synthesis of Leaf Area Index Observations: Implications for Ecological and Remote Sensing Studies. Glob. Ecol. Biogeogr. 2003, 12, 191–205. [Google Scholar] [CrossRef] [Green Version]
- Clark, D.B.; Olivas, P.C.; Oberbauer, S.F.; Clark, D.A.; Ryan, M.G. First Direct Landscape-Scale Measurement of Tropical Rain Forest Leaf Area Index, a Key Driver of Global Primary Productivity. Ecol. Lett. 2008, 11, 163–172. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, J.M.; Jin, G.; Qi, Y. Estimating Seasonal Variations of Leaf Area Index Using Litterfall Collection and Optical Methods in Four Mixed Evergreen-Deciduous Forests. Agric. For. Meteorol. 2015, 209–210, 36–48. [Google Scholar] [CrossRef]
- Loescher, H.W.; Oberbauer, S.F.; Gholz, H.L.; Clark, D.B. Environmental Controls on Net Ecosystem-Level Carbon Exchange and Productivity in a Central American Tropical Wet Forest. Glob. Chang. Biol. 2003, 9, 396–412. [Google Scholar] [CrossRef]
- Cutini, A.; Matteucci, G.; Mugnozza, G.S. Estimation of Leaf Area Index with the Li-Cor LAI 2000 in Deciduous Forests. For. Ecol. Manag. 1998, 105, 55–65. [Google Scholar] [CrossRef]
- Jupp, D.L.B.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating Forest LAI Profiles and Structural Parameters Using a Ground-Based Laser Called Echidna®. Tree Physiol. 2009, 29, 171–181. [Google Scholar] [CrossRef] [PubMed]
- Detto, M.; Asner, G.P.; Muller-Landau, H.C.; Sonnentag, O. Spatial Variability in Tropical Forest Leaf Area Density from Multireturn Lidar and Modeling. J. Geophys. Res. Biogeosci. 2015, 120, 294–309. [Google Scholar] [CrossRef]
- Tang, H.; Dubayah, R.; Brolly, M.; Ganguly, S.; Zhang, G. Large-Scale Retrieval of Leaf Area Index and Vertical Foliage Profile from the Spaceborne Waveform Lidar (GLAS/ICESat). Remote Sens. Environ. 2014, 154, 8–18. [Google Scholar] [CrossRef]
- Bréda, N.J.J. Ground-Based Measurements of Leaf Area Index: A Review of Methods, Instruments and Current Controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef] [PubMed]
- Tang, H.; Brolly, M.; Zhao, F.; Strahler, A.H.; Schaaf, C.L.; Ganguly, S.; Zhang, G.; Dubayah, R. Deriving and Validating Leaf Area Index (LAI) at Multiple Spatial Scales through Lidar Remote Sensing: A Case Study in Sierra National Forest, CA. Remote Sens. Environ. 2014, 143, 131–141. [Google Scholar] [CrossRef]
- Tang, H.; Dubayah, R.; Swatantran, A.; Hofton, M.; Sheldon, S.; Clark, D.B.; Blair, B. Retrieval of Vertical LAI Profiles over Tropical Rain Forests Using Waveform Lidar at La Selva, Costa Rica. Remote Sens. Environ. 2012, 124, 242–250. [Google Scholar] [CrossRef]
- Calders, K.; Origo, N.; Disney, M.; Nightingale, J.; Woodgate, W.; Armston, J.; Lewis, P. Variability and Bias in Active and Passive Ground-Based Measurements of Effective Plant, Wood and Leaf Area Index. Agric. For. Meteorol. 2018, 252, 231–240. [Google Scholar] [CrossRef]
- Leblanc, S.G.; Chen, J.M.; Fernandes, R.; Deering, D.W.; Conley, A. Methodology Comparison for Canopy Structure Parameters Extraction from Digital Hemispherical Photography in Boreal Forests. Agric. For. Meteorol. 2005, 129, 187–207. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.M. Optically-Based Methods for Measuring Seasonal Variation of Leaf Area Index in Boreal Conifer Stands. Agric. For. Meteorol. 1996, 80, 135–163. [Google Scholar] [CrossRef]
- Chen, J.M.; Cihlar, J. Plant Canopy Gap-Size Analysis Theory for Improving Optical Measurements of Leaf-Area Index. Appl. Opt. 1995, 34, 6211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Olivas, P.C.; Oberbauer, S.F.; Clark, D.B.; Clark, D.A.; Ryan, M.G.; O’Brien, J.J.; Ordoñez, H. Comparison of Direct and Indirect Methods for Assessing Leaf Area Index across a Tropical Rain Forest Landscape. Agric. For. Meteorol. 2013, 177, 110–116. [Google Scholar] [CrossRef]
- Wang, J.X.; Xiong, Q.C.; Lin, Q.N.; Huang, H.G. Feasibility of Using Mobile Phone to Estimate Forest Leaf Area Index: A Case Study in Yunnan Pine. Remote Sens. Lett. 2018, 9, 180–188. [Google Scholar] [CrossRef] [Green Version]
- Sanford, R.L., Jr.; Paaby, P.; Luvall, J.C.; Phillips, E. Climate, geomorphology, and aquatic systems. In La Selva: Ecology and Natural History of a Neotropical Rain Forest; McDade, L.A., Bawa, K.S., Hespenheide, H.A., Hartshorn, G.S., Eds.; University of Chicago Press: Chicago, IL, USA, 1994; pp. 19–33. [Google Scholar]
- Hartshorn, G.S.; Hammel, B.E. Vegetation types and floristic patterns. In La Selca: Ecology and Natural History of a Neotropical Rain Forest; McDade, L.A., Bawa, K.S., Hespenheide, H.A., Hartshorn, G.S., Eds.; University of Chicago Press: Chicago, IL, USA, 1994; pp. 73–89. [Google Scholar]
- Kellner, J.R.; Armston, J.; Birrer, M.; Cushman, K.C.; Duncanson, L.; Eck, C.; Falleger, C.; Imbach, B.; Král, K.; Krůček, M.; et al. New Opportunities for Forest Remote Sensing through Ultra-High-Density Drone Lidar. Surv. Geophys. 2019, 40, 959–977. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kellner, J.R.; Clark, D.B.; Hofton, M.A. Canopy Height and Ground Elevation in a Mixed-Land-Use Lowland Neotropical Rain Forest Landscape. Ecology 2009, 90, 3274. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Baret, F. Can-Eye V6.4.91 User Manual. Available online: https://www6.paca.inrae.fr/can-eye/content/download/3052/30819/version/4/file/CAN_EYE_User_Manual.pdf (accessed on 2 January 2020).
- Lang, A.R.G.; Yueqin, X. Estimation of Leaf Area Index from Transmission of Direct Sunlight in Discontinuous Canopies. Agric. For. Meteorol. 1986, 37, 229–243. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of Methods for in Situ Leaf Area Index (LAI) Determination Part II. Estimation of LAI, Errors and Sampling. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018; URL; Available online: https://www.R-project.org/ (accessed on 8 January 2020).
- Kellner, J.R.; Clark, D.B.; Hubbell, S.P. Pervasive Canopy Dynamics Produce Short-Term Stability in a Tropical Rain Forest Landscape. Ecol. Lett. 2009, 12, 155–164. [Google Scholar] [CrossRef]
- Rader, A.M.; Cottrell, A.; Kudla, A.; Lum, T.; Henderson, D.; Karandikar, H.; Letcher, S.G. Tree functional traits as predictors of microburst-associated treefalls in tropical wet forests. Biotropica 2020, 52, 410–414. [Google Scholar] [CrossRef]
- Kamoske, A.G.; Dahlin, K.M.; Stark, S.C.; Serbin, S.P. Leaf area density from airborne LiDAR: Comparing sensors and resolutions in a temperate broadleaf forest ecosystem. For. Ecol. Manag. 2019, 433, 364–375. [Google Scholar] [CrossRef]
- Kamoske, A.G. Personal Communication; Michigan State University: East Lansing, MI, USA, 2020. [Google Scholar]
- Ackerly, D.D.; Bazzaz, F.A. Seedling crown orientation and interception of diffuse radiation in tropical forest gaps. Ecology 1995, 76, 1134–1146. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zenith Angular Resolution | 2.5° | Azimuth Angular Resolution | 2.5° |
| Circle of Interest | 60° | PAISat for clumping | 8 |
| Integration domain for fCover (°) | 0–10° | SubSampling Factor | 1 |
| Forest Type | LAD | MAE | MSE | r | 95% CI | Mean Smartphone PAIeff | Mean Lidar PAIeff |
|---|---|---|---|---|---|---|---|
| Old Growth | P | 1.228 | −1.228 | 0.306 | [−0.268, 0.720] | 2.816 | 1.588 |
| Secondary | P | 0.426 | −0.057 | 0.637 * | [0.346, 0.816] | 1.538 | 1.481 |
| Old Growth | S | 0.542 | −0.124 | 0.306 | [−0.268, 0.720] | 2.816 | 2.693 |
| Secondary | S | 0.973 | 0.972 | 0.637 * | [0.346, 0.816] | 1.538 | 2.510 |
| Old Growth | E | 0.531 | 0.354 | 0.306 | [−0.26, 0.720] | 2.816 | 3.170 |
| Secondary | E | 1.417 | 1.417 | 0.637 * | [0.346, 0.816] | 1.538 | 2.955 |
| Model | ΔAIC | p | r2 |
|---|---|---|---|
| 1: Smartphone PAIeff ~ Lidar PAIeff | 0.00 | <0.001 | 0.59 |
| 2: Smartphone PAIeff ~ Lidar PAIeff + Phone model | −0.18 | <0.001 | 0.60 |
| 3: Smartphone PAIeff ~ Lidar PAIeff + Forest type | −0.97 | <0.001 | 0.61 |
| 4: Smartphone PAIeff ~ Lidar PAIeff + Phone model + Forest type | −3.00 | <0.001 | 0.63 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
E. Rudic, T.; A. McCulloch, L.; Cushman, K. Comparison of Smartphone and Drone Lidar Methods for Characterizing Spatial Variation in PAI in a Tropical Forest. Remote Sens. 2020, 12, 1765. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111765
E. Rudic T, A. McCulloch L, Cushman K. Comparison of Smartphone and Drone Lidar Methods for Characterizing Spatial Variation in PAI in a Tropical Forest. Remote Sensing. 2020; 12(11):1765. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111765
Chicago/Turabian StyleE. Rudic, Tamara, Lindsay A. McCulloch, and Katherine Cushman. 2020. "Comparison of Smartphone and Drone Lidar Methods for Characterizing Spatial Variation in PAI in a Tropical Forest" Remote Sensing 12, no. 11: 1765. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111765