Supporting Urban Weed Biosecurity Programs with Remote Sensing


Agriculture Victoria Research, Department of Jobs, Precincts and Regions, AgriBio, 5 Ring Road, Bundoora, VIC 3083, Australia
*
Author to whom correspondence should be addressed.
Remote Sens. 2020, 12(12), 2007; https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122007
Submission received: 29 May 2020
/
Revised: 11 June 2020
/
Accepted: 19 June 2020
/
Published: 22 June 2020
(This article belongs to the Special Issue Feature Paper Special Issue: Large Spatial Scale Analysis and Intensive Data Use in Urban Social, Ecological, Economic, or Environmental System)
Abstract
:Weeds can impact many ecosystems, including natural, urban and agricultural environments. This paper discusses core weed biosecurity program concepts and considerations for urban and peri-urban areas from a remote sensing perspective and reviews the contribution of remote sensing to weed detection and management in these environments. Urban and peri-urban landscapes are typically heterogenous ecosystems with a variety of vectors for invasive weed species introduction and dispersal. This diversity requires agile systems to support landscape-scale detection and monitoring, while accommodating more site-specific management and eradication goals. The integration of remote sensing technologies within biosecurity programs presents an opportunity to improve weed detection rates, the timeliness of surveillance, distribution and monitoring data availability, and the cost-effectiveness of surveillance and eradication efforts. A framework (the Weed Aerial Surveillance Program) is presented to support a structured approach to integrating multiple remote sensing technologies into urban and peri-urban weed biosecurity and invasive species management efforts. It is designed to support the translation of remote sensing science into operational management outcomes and promote more effective use of remote sensing technologies within biosecurity programs.
1. Introduction
1.1. Background
Weeds (in this paper defined as alien invasive plants) can impact many ecosystems, including natural, urban and agricultural environments. They can have significant costs in terms of the monetary value associated with eradication efforts and loss of productivity, as well as impacts on biodiversity and ecosystem function. For example, the cost of weeds to the Australian agricultural sector was estimated at approximately $5 billion per annum in 2018 due to production losses and the direct costs of control [1]. Weeds are also an important driver of biodiversity loss in natural ecosystems [2].
By their inherent nature, urban landscapes comprise both native and introduced species. Weed species in urban environments can have a range of detrimental impacts, including on ecosystem function [3], human health [4] and biodiversity [5,6]. There are many approaches to weed management, ranging from local community efforts to coordinated landscape-, national- and continental-scale programs [7,8,9,10,11,12]. A common weed biosecurity process, adopted by many Australian states, New Zealand, South Africa, the United States of America, and the European Union, is declaration of noxious weeds, where a range of measures are mandated in legislation [10,11,13,14,15,16]. These management measures can be the responsibility of government or landowners. Noxious weed species can be identified at national, regional and local scales. Urban and peri-urban areas play a key role in weed ecology [17] and may be affected directly by these species or act as sources for weeds to disperse across regions through the interface between urban and agricultural or natural environments.
Weed surveillance programs, which underpin weed management programs, require detection and/or monitoring of weeds wherever they occur in the landscape. This traditionally occurs through a variety of methods, including targeted ground searches by land management agencies, delimitation searches near known infestations to check for spread, searches associated with herbicide application programs, and a range of detection measures that are reliant on community reports, via ad-hoc and formal networks. While effective to some degree, these approaches do not provide a systematic approach to surveillance across regions or landscapes. Therefore, infestations may be missed for years after the original introduction to a site. A documented example is the reporting of alligator weed (Alternanthera philoxeroides) in 2009 at Sandown Racecourse in Melbourne, Australia. Although first reported to the authorities managing the alligator weed eradication program in 2009, a subsequent study utilising historical aerial imagery showed alligator weed was present at this site for at least five years before being reported [18]. During this time, the infestation had increased substantially, from 290 m2 in 2004 to over 7300 m2 in 2009, and would have produced many propagules capable of dispersal. This example highlights the need for new, innovative approaches for weed surveillance, detection and monitoring.
1.2. Paper Aims and Structure
Urban landscapes are typically heterogenous ecosystems with a variety of vectors for invasive weed species introduction and dispersal. This diversity requires agile systems to support landscape-scale detection and monitoring activities, while accommodating more site-specific management and eradication goals. The integration of remote sensing technologies within biosecurity programs presents an opportunity to improve detection rates, the timeliness of data availability, and the cost effectiveness of detection, monitoring, and eradication efforts. Given the rapidly evolving availability and utility of remotely sensed data and associated analytical approaches, it is timely to review the contribution of remote sensing to weed management in urban and peri-urban environments.
Core biosecurity program concepts and considerations for urban and peri-urban areas from both biosecurity program and remote sensing perspectives are discussed in Section 2. Section 3 presents a review of relevant remote sensing technologies and applications, with consideration given to the use of remote sensing at key stages of weed biosecurity programs, challenges and opportunities.
The review undertaken in Section 3 highlights the diverse range of approaches published, which, coupled with the range of species considered to be weeds in different geographical areas, makes generalization not useful. We detail a conceptual multi-scale and multi-species framework in Section 4 to support a structured approach to integrating multiple remote sensing technologies into urban and peri-urban plant biosecurity and weed species detection and monitoring efforts. Given the benefits remote sensing technologies potentially bring to biosecurity applications, clear pathways for integration with operational programs, such as through this framework, may promote greater use of remote sensing technologies on a consistent basis.
2. Weed Biosecurity in Urban and Peri-Urban Environments
Biosecurity refers to measures to protect the environment, economy and community from organisms [19]. Biosecurity programs comprise three key components: detection, monitoring, and eradication and management. While biosecurity approaches and programs are often tailored for different environments and situations, common approaches include enacting a range of surveillance (incorporating detection and monitoring at a range of spatial scales) and management measures aimed at prevention, early detection and eradication, containment, and asset protection measures used against weeds. Actions associated with these approaches are usually applied progressively depending on how widespread the weed is in its invaded range or how far along an idealized invasion curve the weed has established (Figure 1). The measures include policy, planning and ground activities and, in a biosecurity context, usually occur in a centrally coordinated manner, often by government.
Prevention refers to measures taken to prevent an organism colonizing a new environment or habitat, such as legislation to prevent import of restricted organisms into nations or jurisdictions and associated quarantine inspection services. Species on such prohibited organism lists are usually selected based on the outcome of pre-border weed risk assessments [20].
Early detection and eradication refer to legislation and actions to detect and eradicate newly colonizing species from an area of interest, usually a nation or jurisdiction. Eradication in this context means to extirpate all specimens of an organism, including propagules such as seeds, in the declared area until it is locally extinct. Given the difficulty of achieving this, eradication programs have the best chance of success when they are initiated at an early stage of colonization or invasion, prior to the species being well established or widely naturalized [21,22]. The payoff of a successful eradication program is that the high cost of achieving eradication is offset by the annual accruing benefit, in terms of reduced impact and reduced management costs, to the jurisdiction of being free from that organism.
Containment refers to a variation on the strategy, where an organism is well established in a particular area of a jurisdiction and eradication is considered too difficult, or impossible, to achieve [23]. At the same time, other areas of the jurisdiction are free of the organism. In this situation, a containment zone is established, where the organism is managed within the containment zone to reduce its local impact (asset protection), while outside of the containment zone the organism is managed to achieve eradication. There is usually a buffer zone between these two zones where management intensity is intermediate between these two targets. While establishment of containment zones is limited due to their ongoing costs, one example is serrated tussock (Nassella trichotoma) in Victoria. Serrated tussock is declared a regionally prohibited weed in Victoria, Australia [8]. A containment area has been established, and within this area there is a focus on surveillance and control measures to reduce the density of serrated tussock. Outside the containment area there is a focus on more intensive surveillance and eradication treatments to prevent spread. While management is conducted by landholders, coordination of the containment programs is supported by the government.
Asset protection is perhaps a more common weed biosecurity management approach. This refers to measures taken to lessen the impact of an organism by reducing its abundance, often with a pesticide, on an asset such as a garden, field, farm, waterbody or region. Asset protection often occurs, and is managed, at the land manager level, rather than being administered by government organizations as is common for other biosecurity strategies such as prevention and containment.
Cost–benefit ratios of the return on government investment of funding weed management programs have been estimated [24]. These estimates found that the greatest return on government investment occurs in the earliest phase of these measures, i.e., prevention, with the return on government investment decreasing with each successive stage (early detection and eradication, containment, and then asset protection for widespread weeds; Figure 1). An exception to this is the return on government investment for biological control for asset protection, where the returns are much higher [25].
As in all management programs, we cannot manage what we cannot measure. Thus, a critical component of any weed biosecurity program is surveillance activities (detection and monitoring) to find and demark the location and extent of the weed. The unique challenges of urban and peri-urban landscapes are that they are characteristically heterogeneous, leading to a diverse availability of fragmented habitats [27]. Urban landscapes incorporate a large number of habitats, both natural and constructed, including built-up areas, backyard gardens, remnant vegetation (e.g., parks and gardens), manicured parks, waterways and wetlands. A particular challenge is the identification of small fragmented habitats and weed infestations within the large footprint associated with urban and peri-urban areas. This presents challenges for weed management [28], and its fragmented nature means there are many individual areas that a surveillance program needs to cover to ensure that all infestations of a particular weed species are found, increasing the complexity of surveillance requirements. Further, these small areas are often difficult to see and access (e.g., behind buildings, across freeways, or over fences). Search efforts are made more difficult by the multitude of different landowners in urban environments, who each need to be consulted prior to ground searches being undertaken.
Remote sensing technologies are suited to addressing the surveillance issues identified above. The integration of remote sensing technologies into biosecurity programs presents an opportunity to improve detection rates, the timeliness of detection and monitoring data availability, and the cost effectiveness of surveillance and eradication efforts. Remote sensing can support the systematic search of areas (from small sites to large regions) through synoptic data capture at a range of spatial scales compared with targeted ground surveys. Synoptic data capture of remotely sensed data also reduces sampling bias introduced by a-priori information and resource limitations. Remote sensing platforms, such as drones, are also able to access areas inaccessible from the ground. Requirements, from a remote sensing perspective, to support the detection and monitoring of weeds include the following:
- Discrimination of weed species from other vegetation, with identification robust enough to minimize both false positive and false negative identification.
- The ability to detect small infestations of target weed species.
- Repeatability of the approach both over time at the same location and application in different geographical areas.
- Flexibility to survey larger areas as well as small localized sites to support both monitoring of known populations and surveillance to detect previously unidentified populations.
3. Remote Sensing to Support Weed Biosecurity Programs
This section presents a review of remote sensing technologies and image classification approaches used to detect, monitor and manage weed species. While examples are included from a range of environments, there is an emphasis on utility in an urban weed biosecurity context. The requirements of a remote sensing approach depend on the aims of the biosecurity program that the remote sensing will be used for. Therefore, the review is organized by biosecurity program component, as outlined in Table 1, with links to management activities shown in Figure 1. The components are as follows:
- Detection: species detection at landscape, local and site scales.
- Monitoring: assessment of temporal change and population monitoring.
- Management and eradication: individual plant detection and development of technology to automate weed eradication or management actions.
Clearly, there is an overlap of remote sensing technologies and applications between different program components; for example, the confidence in species detection is equally applicable for all three stages. However, some distinctions can be made between program components which reflect the differences in aims between them, including 1) the minimum detection size, which is dependent on the weed species and the aim of the biosecurity program, e.g., eradication of new species or monitoring of widespread species, and 2) synoptic data capture, which is critical for monitoring weed distribution over time, while targeted data capture may be more critical for species and population management or eradication (Table 1).
3.1. Detection
Early detection and implementation of management programs when weed populations are small is a critical predictor of the success of eradication programs [21], and it increases the cost effectiveness of eradication measures (Figure 1). New infestations of priority weeds can occur anywhere in the landscape, and, at this early invasion stage, infestations are limited to a small number of localized populations or individuals. This is the most challenging stage for a weed biosecurity surveillance program. To be effective, the surveillance program must search large areas (>100 km2) at a high spatial resolution to detect and classify individual plants. This surveillance then needs to be repeated at regular intervals to identify possible infestations as early as possible so management mechanisms can be implemented.
Underpinning this is the ability to detect and classify priority weeds at a species level. Without this capacity, any surveillance system based on remote sensing will either misclassify the weed as non-target vegetation (resulting in missed detection due to false negatives, or omission error), or classify non-target vegetation as the weed (resulting in large areas of false positives, or commission error). Both of these outcomes would reduce the effectiveness of any remote sensing component of a biosecurity program.
3.1.1. Spatial Scale and Image Resolution
To support weed biosecurity programs, information is required at a range of spatial scales from sites (<1 km2) to landscapes (>100 km2). Urban and peri-urban landscapes are characteristically heterogeneous, with fragmented diverse habitats, adding complexity to the challenging task of species detection for use in biosecurity programs. The choice of remote sensing system is guided by a number of factors, including the area required to be imaged and the swath (footprint) size of the imagery acquired by a particular remote sensing system.
There is a trade-off between image swath and the spatial resolution of the imagery. For example, Unmanned Aerial Vehicle (UAV) data is characterized by higher spatial resolution (typically measured in mm or cm) but is acquired over areas of often less than 1 km. In contrast, WorldView-4 is a commercial satellite with a multi-spectral spatial resolution of 1.24 m and a swath of approximately 13 km, while Landsat-8 is a government, open-access satellite with a multi-spectral resolution of 30 m but captures a swath of 185 km. Satellite imagery is often used for regional and landscape scale studies [29], while UAV data are frequently utilized at local scales. This is largely reflected in the purpose of the application as well; finer-spatial-scale imagery lends itself to plant detection (either small populations or individual plants), while coarser imagery is typically implemented for broader monitoring applications.
Commercial satellite imagery tends to have a higher spatial resolution (<5 m) compared with government satellite imagery (>10 m) and is often utilized for weed detection applications [30,31,32]. Ahsan et al. [33] found the higher spatial resolution of commercial satellites such as WorldView-4 resulted in higher detection accuracies compared with Landsat-8. The higher cost of UAVs and commercially available satellite imagery can limit its use across larger regions, while the lower spatial resolution of freely available satellite imagery (e.g., Sentinel-2) can limit its use in heterogenous areas or for weed detection.
Multiple studies reported increasing classification accuracy with higher-spatial-resolution imagery [30,34,35,36]. Larger homogenous areas of particular species are detected reliably by satellite imagery; however, this is not reflective of many urban environments or populations of weed species, especially at the early stage of invasion. Shouse et al. [37] compared aerial imagery (30-cm spatial resolution) and Landsat 5 TM satellite imagery (30-m spatial resolution), and found significantly more accurate results using the aerial photography, despite this imagery having less spectral information available for analysis. However, Müllerová et al. [38] demonstrated that this is not always the case. Hung et al. [39] investigated scale dependencies on classification accuracy, as an interaction between pixel size and analysis window size. They found detections of water hyacinth (Eichhornia crassipes) had a higher accuracy with a larger analysis window, which captured a larger area of the image and improved the consistency in colour and texture features calculated. They also found serrated tussock had a higher classification accuracy with increasing window size until the window size approximated the size of a single tussock. This demonstrates the importance of considering the size of the plant population and density in weed detection applications [37,38,39].
These considerations promote the use of multiple data sources at different spatial scales to optimize outcomes. Brinkhoff et al. [30] suggested targeted capture of commercial satellite imagery, such as WorldView-4, at critical times for target species identification, supplemented with UAV imagery captured across smaller targeted areas for more detailed surveys. Matese et al. [40] found the costs of using UAV and manned aircraft data rose substantially between study areas of 5 ha and 50 ha, while costs associated with satellite imagery stayed constant. They advocate a multi-scale approach due to differences in the nature of the information, detail and temporal frequency between the three different platforms, which all contributed to improved management outcomes.
3.1.2. Spectral and Phenological Information
A range of spectral data are collected via remote sensing platforms including Red–Green–Blue (RGB), multi- and hyper-spectral data and structural data, such as that recorded by LiDAR sensors. To utilize this information, there are a range of image processing approaches, such as vegetation indices, image texture and colour transformations. The spectral bands captured by a sensor, and different combinations of these, influence the accuracy of image classification for species detection. The effectiveness of alternative spectral features used for analysis is linked closely with the target species. For example, Brinkhoff et al. [30] found an RGB and near-infrared (NIR) band combination outperformed both RGB and combinations of vegetation indices such as Normalised Difference Vegetation Index (NDVI) and Normalised Difference Water Index (NDWI). Ngom and Gosselin [4] also found individual bands (namely green reflectance) had greater discriminatory power than NDVI. In contrast, Malstrom et al. [41] and Shouse et al. [37] used NDVI, and differences in NDVI between two time periods, to successfully differentiate weed species from other vegetation. Colour transformations, such as Hue–Saturation–Value (HSV), have also been used effectively to discriminate weed species from imagery [33,42], as has image texture [43]. The variety of spectral features used in the successful detection of weed species emphasizes the importance of testing and selecting features that maximize the discriminatory power of the imagery being used.
LiDAR data differs from spectral information and is able to provide 3-D structural information, which has been utilized to detect understory weed species in urban environments [44]. Combinations of data are also used to optimize results. For example, a fusion of hyper-spectral and LiDAR data is utilized to identify trees in urban landscapes and produce species-level maps with >80% accuracy [45]. The tree species were then identified as a weed species. LiDAR and hyper-spectral imagery have also been used in combination to identify sub-canopy weed species in urban environments [46].
Phenological characteristics of vegetation are important considerations for remote sensing studies in terms of image acquisition timing and also multi-temporal analyses [47]. Müllerová et al. [38] found image acquisition timing to be a critical consideration, with the best results achieved when both plant phenological stage and sensor spectral resolution were considered to take advantage of flowering, senescence and other colour distinctions associated with the target species. Singh et al. [48] also utilized plant phenology to identify understory plant species, demonstrating that the timing of imagery acquisition was a key factor in maximizing the accuracy of detection. Many other studies have also used these features to discriminate between species, exploiting differences in growth patterns and colouring between weed species and other off-target species [41], plant colour [49], and flower colour [50,51].
3.1.3. Image Classification
There has been significant work identifying particular plant species utilising remote sensing technologies and analytical approaches. Studies tend to be quite location- and species-specific, with less focus on coordinated, more comprehensive sensing programs to conduct surveillance over larger areas through time. These methods and algorithms have been tested on known populations of invasive weed species; however, a key challenge in terms of weed biosecurity is then being able to apply these approaches across other areas to detect unknown populations of the target species. Studies documenting approaches to more widespread problems include Himalayan blackberry (Rubus armeniacus) [46], phragmites (Phragmites australis) [3,34,52], and water hyacinth [53,54,55,56]. To illustrate the diverse range of remote sensing approaches utilised for a single species, studies which successfully detected phragmites have used government satellites [3], UAV imagery [34] and aerial imagery [52], capturing both multi- and hyper-spectral imagery, and employed a range of image classification approaches, including Spectral Angle Mapper [52] and supervised classification algorithms including maximum likelihood, support vector machines (SVM) and neural networks [3].
Plants can be characterized by deriving presence and absence information as well as the density of populations [29,37]. The aim of image classification is either distinguishing between plant functional groups (e.g., grasses, shrubs, trees) or identifying individual species where unique spectral and textural features can be used to discriminate between the target and other components of the image. Owing to the diverse and large range of plants and surfaces found within urban areas, identifying unique spectral signatures can be challenging [4]; however, reducing the area of interest within a landscape, for example, by eliminating roof surfaces, roadways or other non-viable habitats, may assist in weed detection. Given the range and variability of what is considered a weed species, particularly in urban environments, a wide variety of remote sensing platforms and classification algorithms have been utilized. A summary of commonly used classification approaches for weed detection applications is given in Table 2 with selected examples of each given for various remote sensing platforms.
Unsupervised classification approaches cluster pixels into a user-specified number of classes without requiring training or ground data. Both Walsh et al. [32] and Everitt et al. [59] used an ISODATA unsupervised classification algorithm to detect weeds from remotely sensed data, with Everitt et al. [59] identifying giant salvinia (Salvinia molesta) from Quickbird imagery with an accuracy of between 87 and 93%. Malstrom et al. [41] also employed an ISODATA classification but found supervised classification algorithms such as maximum likelihood produced a more accurate detection rate.
Supervised classification approaches such as maximum likelihood, SVM and RF rely on calibration or training data of sufficient quality and quantity to train these algorithms efficiently and effectively. Acquiring and curating this data is often very resource intensive in terms of effort and time, and there are many factors to consider, including:
- Minimum number of samples per class.
- Distribution (equal or unequal) of samples across classes.
- The sampling design used to collect ground data (random, targeted, stratified, clustered sampling).
- The relationship between the ground samples collected and the spatial resolution of the imagery to be used.
- The accuracy of the ground data.
Mountrakis et al. [68] noted the increasing use of SVM for weed detection, as the approach is able to be effectively employed with limited amounts of calibration data, which is often the case for detection of rarer species, including weeds with little formal distribution data. Calibration (and validation) data are generated through ground data collection or the manual interpretation of imagery. Manual interpretation, if able to be completed reliably, represents a less resource-intensive and more synoptic survey compared with on-ground field surveys. Classified, finer-resolution imagery has also been used for calibration data [30,55]. The accuracy of the final image classification will be influenced by any errors present in the calibration and validation datasets used.
The most accurate classification approach can vary depending on sensor, platform and target. Numerous studies test a range of image classification approaches to determine the most appropriate. For example, Brinkhoff et al. [30] found a CART classifier was slightly more accurate than RF or SVM. Xie et al. [3] found SVM gave the highest accuracy mapping phragmites (>90%), with lower accuracies obtained using maximum likelihood and neural network approaches. Müllerová et al. [38] found results obtained using maximum likelihood, RF and SVM approaches varied depending on spatial resolution and time of image acquisition (which was linked to vegetation phenology). They noted that machine learning approaches such as RF make no assumptions about data and so are better at dealing with imbalanced data than some other approaches. Chance et al. [46] also used an RF approach, combining hyper-spectral and LiDAR data to detect urban weed species with >75% accuracy for their targets. Singh et al. [48] and Singh et al. [44] also used RF for the detection of understory weed species in urban landscapes using a range of aircraft, commercial and government satellites with LiDAR and multi-spectral sensors.
Spectral un-mixing techniques support analyses of sub-pixel composition, identifying proportions of cover for target weed species. Walsh et al. [32] used linear un-mixing models with hyper-spectral Hyperion data to derive percentage cover maps of invasive guava (Psidium guajava), achieving similar accuracies to those of neural networks. Artigas and Pechmann [52] found that the proportion of area covered by phragmites dramatically affected the classification accuracy, achieving a 96% accuracy if phragmites covered more than 75% of a pixel, but less than 4% accuracy if the pixel was covered by phragmites and native species in equal measure. Spectral un-mixing techniques can also be used to improve the thematic classification of imagery where multiple species grow in close proximity [54]. Sufficient spectral information is required to apply these methods successfully.
Recent advancements in this area have seen greater use of deep learning algorithms such as CNNs [33,39,55,65,66,67]. CNNs are able to utilize a range of data and can be used on a pixel-basis or to identify individual plants within an image scene [55,65]. These algorithms have been used to successfully detect weed species with a variety of distinguishing features including colour (e.g., flower colour of orange hawkweed), plant shape (e.g., serrated tussock) and leaf shape [33,65,66]. Hung et al. [39] used feature learning algorithms to identify water hyacinth and serrated tussock using UAV data with >90% accuracy. They found that algorithm parameters such as window size greatly influenced the accuracy of these algorithms. Development and use of deep learning algorithms in the remote sensing and broader data science community is increasing access to, and awareness of, pre-trained models, open-source code, and image training libraries, facilitating a wider use of these techniques.
Object-Based Image Analysis (OBIA) techniques have been used successfully to analyse and model growth and land use change in urban and peri-urban areas [69,70,71], identify and analyse building and road networks [72,73,74,75,76,77], perform ecosystem and landscape analyses [78,79,80], and identify features of interest such as greenhouses [81] and piggeries [82]. Increasingly, OBIA techniques have been used in weed detection studies [4,34,55,61]. OBIA techniques are used based on a number of different characteristics, including tree crown delineation [45], leaf shape [83], and individual plant delineation [31]. Spectral, textural and shape parameters of these objects are then used to classify objects as different plant species. Walsh et al. [32] found comparable results between OBIA and pixel-based classification approaches, but found the results were highly dependent on the settings used for the segmentation algorithm, with a process delineating a finer resolution of objects required to achieve acceptable results. A similar approach to OBIA is a CNN implementation at an image scene level, where the neural network is trained to recognize individual plants rather than spectral features of pixels [65]. Ahsan et al. [33] classified serrated tussock with up to 73% accuracy using UAV imagery and multi-scale neural networks to identify populations of tussocks within a section of the image.
3.2. Monitoring
Once a weed population has been detected, monitoring is a crucial step in a biosecurity program to limit further spread, implement management actions such as containment, and monitor the success of management actions such as eradication and asset-based protection. Monitoring can include observations of both current weed populations and known past locations to ensure the weed does not regrow. This critical difference between detection and monitoring allows a remote sensing program to target geographical areas, thus making the process more constrained than a detection surveillance program, which is untargeted. Monitoring applications rely on detection methods (reviewed above) being robust enough to be applied repeatedly with acceptable accuracy, through time and potentially across new geographical areas.
Multi-temporal image analysis is used effectively in weed monitoring applications. Several studies have used this approach to monitor the size and spread of known populations over time [54], including the use of historical imagery to trace the beginning of infestations and their subsequent progression [18,58]. Khanna et al. [53] applied the same classification approach to five years of imagery (with comparable accuracy) to produce cover maps, and then used these maps to monitor change in water hyacinth coverage over time. However, additional considerations must be made when using time series or multi-temporal analyses, including geo-registration of imagery, acquisition dates, atmospheric corrections, changes in sensor view angle and changes in on-ground conditions between images. For example, Brinkhoff et al. [30] noted differences in imagery based on water reflectance arising from view angle and weather conditions.
Changes between multiple images can also be used as a species discriminant [37,41]. Linear un-mixing methods, which determine sub-pixel proportions of different cover types, have also been used to identify edges, or transition zones, of widespread weed species in a containment management phase [32]. Remote sensing has also been utilized to distinguish potential habitats for weed species in urban areas [84].
Frequent temporal acquisitions are important for monitoring species which disperse quickly through the landscape [18,41,85]. The choice of platform and sensor depends on the species to be detected and the area being covered, as well as resources available. Capturing images at landscape scales of >100 km2 is not considered feasible using UAVs; however, they are routinely used to capture imagery across smaller areas [33]. The feasibility of repeated UAV flights depends on resources available. Potential legal implications of operating UAV platforms in some areas are also a consideration, e.g., roads, electricity lines and private property [38,86]. In contrast, satellite data, while providing a coarser spatial resolution compared with UAV imagery, are routinely captured across landscapes [60], highlighting advantages of using multiple sources of remotely sensed imagery for weed biosecurity programs. The potential to utilize sources of imagery captured across urban areas for other purposes, for example, for planning and infrastructure projects, may be advantageous for remote-sensing-based weed detection and monitoring applications in urban and peri-urban areas, if the imagery is suitable for the purpose. An example of this potential is the capture of high-spatial-resolution (10 cm–35 cm) aerial imagery across the urban and peri-urban areas of Greater Melbourne, which is undertaken multiple times per year as part of the Victorian Coordinated Imagery Program (CIP) [87].
3.3. Eradication and Management
Eradication efforts are critical in eliminating or containing the spread, and impact, of the target weed species. This component of a biosecurity program relies on accurate detection and identification of a weed species within a relatively small geographic target area (weeds are usually not targets of eradication once widespread). Remote sensing contributions to these actions are largely through the detection and monitoring approaches reviewed above, which in turn support timely eradication of target species.
In-field sensors and systems to support weed species identification in real time, which are integrated with systems to automate weed eradication and treatment (e.g., herbicide spraying), have also been developed [65,83,86]. Current published work places an emphasis on automated weed recognition and removal in agricultural systems, with development of niche systems to suit the application [88,89,90].
3.4. Challenges and Opportunities
While remote sensing technologies are able to address some issues encountered by ground-based weed detection and surveillance efforts, there are specific challenges remote sensing applications must address in urban and peri-urban environments. One challenge for the detection and surveillance of weeds is the increased diversity of plant species found within the urban environment. For example, a review by Pickett et al. [27] on urban ecology found that the flora of forest patches in urban areas contained a greater number of exotic species than forests outside urban areas; a high proportion of plants in housing estates are exotic, with this being greatest in more affluent areas; parkland and pathways have also been found to enhance the presence of exotic flora. Overlaid on this is a general decrease in the number of plant species toward the centre of cities. More recent studies have also documented greater weed abundance or invasion in urban areas [91,92,93]. This diversity increases the challenge of species-specific detection as the presence of more off-target species increases the opportunity for misclassification. There are also diverse fragmented habitats within urban landscapes, leading to large, un-defined search areas. In contrast, weed identification in agricultural crops requires discrimination between a limited number of plant species [55,66,67,94]. This is also reflective of the heterogeneity of urban environments compared to agricultural settings. These considerations increase the specificity requirements of any remote sensing used to support weed biosecurity programs in urban and peri-urban areas.
An additional challenge for remote sensing applications in urban environments is the collection of sufficient calibration and validation data, which can be affected by access to land held by diverse land owners, species identification, data reliability and the occurrence (restricted or widespread) of the target species. Citizen science and open-source data, including spatial locations of invasive weed species [95,96] and photographic databases [65], are potentially useful sources of reference data, which could be leveraged to increase the scale and scope of weed detection and monitoring efforts using remotely sensed data.
Published literature tends to document the performance of sensing systems and classification algorithms for specific species in a single context. Some species considered weed species in urban areas are found in a variety of settings, including urban, agricultural and natural environments, leading to multiple studies on a similar species in different surrounding environments, employing varying sensing technologies and classification approaches (e.g., phragmites in wetlands and estuaries [3,34,35,52]). There is a large body of work detecting agricultural weeds using remote sensing technologies, and, while the target species may be different, approaches and algorithms may be applicable in other settings such as urban areas. In comparison, there are fewer remote sensing studies that aim to detect weed species specifically in urban and peri-urban areas [4,37,45,46], which is reflective of current research trends and the profile of weed impacts in different environments, such as their economic costs in agricultural settings [1,97,98].
Challenges and potential limitations in the detection of small weed populations [47,57] may mean in some instances that remote sensing contributions to urban weed biosecurity are more valuable in monitoring known locations than detecting new ones. This still provides valuable information for biosecurity programs and improves the efficiency of search and monitoring activities. For example, biosecurity agencies may use regular monitoring data to assess the extent of a particular weed species in response to new management arrangements or the release of biocontrol agents; they may also use such data to better target ground inspections associated with enforcement activities. This challenge is particularly important when considering requirements for research and development compared with practical requirements for operational approaches which can be integrated and used within existing or new biosecurity weed management programs.
4. Conceptual Framework for a Weed Aerial Surveillance Program (WASP)
There has been significant work identifying particular plant species utilising remote sensing technologies and analytical approaches, as outlined in the previous section. Studies tend to be quite location- and species-specific, with less focus on coordinated, more comprehensive sensing programs to conduct surveillance and monitoring over larger areas through time. There are few examples of routine use of remote sensing in biosecurity programs. Two examples are the New South Wales Hawkweed Eradication Program in Australia [50] and Everglades Multi-scale Invasive Plant Monitoring Program [85]. However, these do not incorporate urban areas. The relative absence may be due to an absence of such comprehensive surveillance programs, or it may reflect the operational nature of this approach, where publications are not a priority.
The diverse range of approaches used and number of weed species of interest surveyed in Section 3 make generalization between studies not overly useful. Rather, we present a conceptual framework to outline a structured approach for developing image analytical workflows and algorithms at multiple spatial scales, with clear pathways for integration with on-ground biosecurity programs to support wider use of remote sensing technologies in this area. While this approach is not exclusively applicable to urban and peri-urban environments, there is a current gap and potential for development in these areas.
The purpose of this conceptual framework is to guide the development and testing of workflows and algorithms for the detection and monitoring of weed species using multiple types of remotely sensed data. The framework facilitates integration of approaches for multiple species across different spatial scales, while linking to existing biosecurity operations at different stages (Table 1) and complementing weed eradication and management options (Figure 1). This will support the development of more comprehensive operational multi-scale, multi-temporal and multi-target biosecurity detection and surveillance programs utilising remote sensing technologies.
A schematic outline of the framework, named the Weed Aerial Surveillance Program (WASP), is shown in Figure 2. It is designed to support the translation of science into operational management outcomes. The WASP framework is focused on surveillance utilising remotely sensed data. These include detection of unknown populations of target weed species and monitoring of known populations of target weed species (Table 1). The aim of the framework is to assist in the design and structure of remote sensing activities to complement existing weed biosecurity programs through the following:
- Development and testing of workflows and image classification algorithms to detect and monitor weed species.
- Production of spatial outputs which can then be used in existing biosecurity weed management programs.
Outcomes of the WASP are intended to complement on-ground activities, with the overarching goal to support the eradication and management of a target weed species. The primary outcomes of the WASP are automated spatial outputs, which would necessarily be tailored for a specific application but may include maps and spatial information to prioritize on-ground surveillance work, data to monitor the effectiveness of weed eradication or management actions undertaken on-ground as part of weed biosecurity operations, or measurements of weed extent and spread over time.
The addition of these outputs to a weed biosecurity program is intended to increase the effectiveness of on-ground surveillance activities and management actions. As introduced in Section 1 of this paper, the detection of alligator weed at Sandown Racecourse in Victoria, Australia, provides an example supporting the integration of remotely sensed data to improve weed detection, eradication and on-going management efforts undertaken as part of an existing biosecurity program [18]. In this instance, alligator weed was first reported at the site in 2009; however, an assessment of historical aerial imagery found the weed was present at the site from 2004. The development of workflows to automatically detect alligator weed from aerial imagery, the design and structure of which could be aided by a conceptual framework such as the WASP, would have resulted in the detection of the weed at an earlier point in time. The use of these automated spatial outputs in weed biosecurity programs which were already in place would have reduced eradication costs and reduced the potential spread of the weed to additional sites.
The development and testing of workflows and algorithms combines a number a processes which are largely driven by characteristics of the target weed species (i.e., phenology, distinguishing characteristics, growth habit and size) and the extent to which these can be exploited by remote sensing technology with appropriate spatial resolution, spectral information, and temporal frequency. To structure the development and testing process, a remote sensing technology and analytical method matrix (TAMM) has been constructed as the first step of the WASP, based on a review of remote detection of weeds and knowledge of biosecurity programs and processes. Table 3 outlines a sample TAMM, with example considerations in the form of questions given that are helpful in the development stage to determine preferred approaches to the test. It is highly likely that multiple approaches and imagery sources will be identified, which would then be tested as part of the development process.
The review (Section 3.1) highlighted the diversity of imagery used in published weed detection applications (Table 2). Factors considered when selecting appropriate imagery include the following:
- The temporal and spectral resolution of the imagery.
- The swath of the imagery captured.
While not all published studies explicitly consider these factors, generally, the use of satellite imagery is more predominant at landscape scales and the use of finer spatial resolution imagery such as UAV data is more common at site or local scales. Several studies propose the use of multiple sources of remotely sensed imagery to exploit differences in spatial, spectral and temporal differences between sources of imagery, which may lead to improved weed detection and management outcomes [30,40]. The WASP framework also advocates a multi-scale approach (from site to landscape areas) to fulfil detection and monitoring requirements, which, by its implicit nature, lends itself to the use of multiple sources of imagery to leverage characteristics of different platforms.
The temporal characteristics of both the target weed species and imagery are crucial to support accurate detection and monitoring of the weed species. Vegetation phenology, including growth patterns and flowering, can provide features to distinguish a weed species from off-target species [41,50,51]. To take advantage of this, the timing of image acquisition relative to these characteristics is critical [38,47,48]. The temporal frequency of image capture also underpins many monitoring applications. Questions and considerations proposed in the sample TAMM shown in Table 3 are designed to assist in determining requirements for specific target weed species. While this type of matrix analysis can identify the preferred spatial and temporal imagery characteristics for an application, the practicality of these options is equally important, particularly for operational purposes. Several studies identified instances where the feasibility of collecting the required imagery, particularly UAV imagery, may impact on the operational requirements of the application [33,38,86]. Making use of multiple sources of imagery with differing spatial and temporal resolutions may optimize outcomes in some cases, for example as outlined in Brinkhoff et al. [30].
The review identified a wide range of image classification approaches used to detect weed species (Table 2). Some methods, such as maximum likelihood, are well established, while the use of approaches such as CNNs are increasing. Two very commonly used approaches are RF [44,46,48,51,62] and SVM [3,63,64]. SVM, in particular, is able to be effectively applied with limited amounts of calibration data [68], which is an important consideration for detection of rarer species, including small populations of weed species. While the development of detection methods, including classification approach selection, is largely species-specific, formally capturing these decision-making processes and knowledge within the WASP framework may enable existing workflows and algorithms to be re-utilized, streamlining processes in the future. Integration of workflows and algorithms for different species will also facilitate more economic, targeted image capture where possible (e.g., commissioned aircraft flights or UAV use).
The objective of the workflow and algorithm development process is to produce spatial outputs to support on-ground biosecurity weed surveillance and management programs. These spatial outputs would ideally be based on the requirements of those responsible for the biosecurity programs (for example government authorities), with technical expertise provided by remote sensing practitioners, and may include locality maps, spatial distribution probabilities, and change detection analyses of known weed populations. For example, a weed subject to an eradication program requires detection and demarcation of small infestations of weeds, with a relatively high tolerance for false positives (to ensure as many infestations as possible are detected). In contrast, detection of larger infestations with a lower tolerance for false positives may be suitable for a widespread weed.
It is anticipated that the outputs would be utilized within existing programs where possible. While there are advantages to utilizing remote sensing in the context of weed biosecurity programs, the specific benefits and limitations of a particular program or application should be identified by those administrating the weed management program, as well as technical specialists, to ensure it is appropriate.
A key consideration is to assess how well the needs of the biosecurity program are met by remote sensing technologies. Table 1 outlines some key considerations from both biosecurity and remote sensing technologies. This should also include an assessment of the level of investment required compared to the expected return. For example, the effectiveness of landscape-scale monitoring may increase through the use of remote sensing; however, monitoring a small, localized and contained weed population may not. The availability of resources required to support the use of remote sensing and associated products is an equally important factor. This includes, but is not limited to, computing hardware and software, resources to collect imagery if required, and the necessary processes to distribute and utilize any outputs. These, in addition to factors such as image processing capability, image acquisition windows, technical specialist availability and access to technology may impact the ability of remote sensing to support biosecurity programs. The importance of these different considerations is highly dependent on the individual application.
The primary focus of WASP is providing information at a range of spatial and temporal scales derived from remotely sensed data. Data integration is a powerful approach to improve understanding of weed species abundance, potential spread, and infestation risk across multiple spatial scales [99]. At national and regional scales, climatic suitability and risk modelling are often used, with several studies exploring the potential for remote sensing data to add to these models [56,100,101,102]. This habitat suitability information requires the collation of data on the landscape (such as climate, soil and land use) and species biology to determine where they intercept, and, therefore, where the species is likely to occur. Information on the known distribution and dispersal characteristics can also be used, if available. There are a number of dispersal models that have been developed for weeds, e.g., wind dispersal of serrated tussock [103] and dispersal by vehicles [104]. Even allowing for wind dispersal of seed, for many weeds at an early stage of invasion, this will reduce the area to search considerably and may be able to reduce the occurrence of false positive detections in remotely sensed outputs. Conversely, outputs from the framework can also be used to update distribution knowledge. Development of species distribution and dispersal models is beyond the scope of this article and the WASP framework; however, additional spatial information can be integrated where appropriate, as illustrated in Figure 2.
Weed management programs require detection at a range of spatial and temporal scales; therefore, any surveillance program will have an iterative component. For example, a regional-level remote sensing program could be utilized to find potential new infestations in the landscape; if on-ground inspections confirm that it is the target species, then tailored site surveys would be conducted to delimit the infestation. These surveys may then employ targeted/ordered imagery capture and an associated image classification system at the local or site scale. Additionally, monitoring of known weed populations (a distinct process to searching for new locations) can be used to provide quantitative data to support reporting requirements and provide triggers for further on-ground management operations, allowing on-ground resources previously used for this purpose to be utilized elsewhere. The WASP framework can be used to guide this process.
5. Concluding Remarks
Urban and peri-urban weed biosecurity programs are important to minimize the threat of weed species to both the local environment and to the wider landscape. The fragmented nature of land tenure and habitats, along with the presence of visual obstructions, in urban and peri-urban areas make ground-based surveillance, detection and monitoring programs for priority weeds complex and difficult. These programs can benefit from remote sensing, which can overcome some of these issues.
Remote sensing has been used successfully in a range of weed detection and monitoring applications, incorporating diverse habitats and weed targets. Many different approaches have been used for image acquisition and analyses, such that generalization of how these are achieved, and which is best, is not overly useful. This review identified a broad range of examples identifying weeds species from remotely sensed data, including UAV, aircraft and satellite imagery. While studies often utilized one source of imagery, some compared several [33,37], while other advocated the use of multiple imagery sources to optimize outcomes [30,40]. The review identified a wide range of image classification approaches used to detect weed species, including pixel- and object-based approaches. Two very commonly used approaches are RF [44,46,48,51,62] and SVM [3,63,64]. SVM, in particular, can be applied with limited amounts of calibration data [68] which is an important consideration for detection of rarer species, including small populations of weed species. Development and use of deep learning algorithms such as CNNs in the remote sensing [55,65,66] and broader data science community is increasing access to, and awareness of, pre-trained models, open-source code, and image training libraries, facilitating a wider use of these techniques. Several studies have used multi-temporal image analysis to monitor the size and spread of known populations over time [54], including the use of historical imagery to trace the beginning of infestations and their subsequent progression [18,58].
Despite this success, there are limited operational programs that we are aware of that routinely use remote sensing to inform weed biosecurity programs that are described in publications, particularly in urban and peri-urban environments. Because of the wide range of approaches employed, combined with a lack of descriptive publications of operational programs, development of weed remote sensing tools to assist with weed biosecurity programs would be expediated by a guiding structured framework. We present a conceptual framework, WASP, to facilitate this, supported by a review of published studies. WASP contains approaches for (1) development and testing of workflows and image classification algorithms to detect and monitor weed species, and (2) production of spatial outputs which can then be used in existing biosecurity weed management programs. The framework supports the translation of remote sensing science into operational management outcomes, which is critical when considering requirements for research and development compared with requirements for operational methodologies which can be integrated and used within existing or new biosecurity weed management programs.
Author Contributions
Conceptualization, K.S. and T.D.; writing—original draft preparation, K.S. and T.D.; writing—review and editing, K.S. and T.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Agriculture Victoria.
Acknowledgments
We would like to thank the reviewers for their thoughtful suggestions, which improved this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- McLeod, R. Annual Costs of Weeds in Australia; Centre for Invasive Species Solutions: Canberra, Australia, 2018.
- Baider, C.; Florens, F.V. Control of invasive alien weeds averts imminent plant extinction. Biol. Invasions 2011, 13, 2641–2646. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, A.; Welsh, W. Mapping Wetlands and Phragmites Using Publically Available Remotely Sensed Images. Photogramm. Eng. Remote Sens. 2015, 81, 69–78. [Google Scholar] [CrossRef]
- Ngom, R.; Gosselin, P. Development of a remote sensing-based method to map likelihood of common ragweed (Ambrosia artemisiifolia) presence in urban areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 126–139. [Google Scholar] [CrossRef]
- Dimitrov, S.; Georgiev, G.; Georgieva, M.; Gluschkova, M.; Chepisheva, V.; Mirchev, P.; Zhiyanski, M. Integrated assessment of urban green infrastructure condition in Karlovo urban area by in-situ observations and remote sensing. One Ecosyst. 2018, 3, e21610. [Google Scholar] [CrossRef] [Green Version]
- Dures, S.G.; Cumming, G.S. The confounding influence of homogenising invasive species in a globally endangered and largely urban biome: Does habitat quality dominate avian biodiversity? Biol. Conserv. 2010, 143, 768–777. [Google Scholar] [CrossRef]
- Blood, K.; James, R.; Panetta, D.F.; Sheehan, M.; Adair, R.; Gold, B. Early Invader Manual: Managing Early Invader Environmental Weeds in Victoria; Department of Environment, Land, Water and Planning: Victoria, Australia, 2019.
- PPWCMA. Port Phillip and Westen Port Invasive Plants & Animals Strategy; Port Phillip and Westernpot Catchment Management Authority (PPWCMA): Frankston, Victoria, 2011.
- Laidlaw, M.J.; Louden, M.A.; Bean, A.R. A Handbook for the Weed Spotters Network Queensland; Queensland Herbarium: Toowong, QLD, Australia, 2019.
- Hulme, P.E. Plant invasions in New Zealand: Global lessons in prevention, eradication and control. Biol. Invasions 2020, 22, 1539–1562. [Google Scholar] [CrossRef] [Green Version]
- USDA. Animal and Plant Health Inspection Service: Noxious Weeds Program. Available online: https://www.aphis.usda.gov/aphis/ourfocus/planthealth/plant-pest-and-disease-programs/pests-and-diseases/sa_weeds/sa_noxious_weeds_program/ct_noxious_weeds_program_home (accessed on 21 May 2020).
- University of Georgia—Centre for Invasive Species and Ecosystem Health; University of Florida—Centre for Aquatic and Invasive Plants. North America Invasive Species Network. Available online: https://www.naisn.org/ (accessed on 21 May 2020).
- Groves, R.H.C.; Hosking, J.R.; Batianoff, G.N.; Cooke, D.A.; Cowie, I.D.; Johnson, R.W.; Keighery, G.J.; Lepschi, B.J.; Mitchell, A.A.; Moerkerk, M.; et al. Weed Categories for Natural and Agricultural Ecosystem Management; Bureau of Rural Sciences: Canberra, Australia, 2003. [Google Scholar]
- Weiss, J.; Edgar, B.; Hunt, T.; Morfe, T. Victoria’s noxious weed review: Roll out not fall out. In Proceedings of the 14th Australian Weeds Conference, (Weed Society of NSW, Sydney), Wagga Wagga, Australia, 6–9 September 2004; Sindel, B.M., Johnson, S.B., Eds.; pp. 707–710. [Google Scholar]
- Henderson, L. Alien Weeds And Invasive Plants; Plant Protection Research Institute, Agricultural Research Council: Cape Town, South Africa, 2001. [Google Scholar]
- European Union. Invasive Alien Species of Union Concern; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Gaertner, M.; Wilson, J.R.U.; Cadotte, M.W.; MacIvor, J.S.; Zenni, R.D.; Richardson, D.M. Non-native species in urban environments: Patterns, processes, impacts and challenges. Biol. Invasions 2017, 19, 3461–3469. [Google Scholar] [CrossRef] [Green Version]
- Clements, D.; Dugdale, T.M.; Hunt, T.D. Growth of aquatic alligator weed (Alternanthera philoxeroides) over 5 years in south-east Australia. Aquat. Invasions 2011, 6, 77–82. [Google Scholar] [CrossRef]
- McKirdy, S.J.; Sharma, S.B.; Bayliss, K.L. Quarantine and Biosecurity; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Kumschick, S.; Richardson, D.M. Species-based risk assessments for biological invasions: Advances and challenges. Divers. Distrib. 2013, 19, 1095–1105. [Google Scholar] [CrossRef]
- Dodd, A.J.; Ainsworth, N.; Burgman, M.A.; McCarthy, M.A. Plant extirpation at the site scale: Implications for eradication programmes. Divers. Distrib. 2015, 21, 151–162. [Google Scholar] [CrossRef]
- Thomas, M.L.; Gunawardene, N.; Horton, K.; Williams, A.; O′Connor, S.; McKirdy, S.J.; van der Merwe, J. Many eyes on the ground: Citizen science is an effective early detection tool for biosecurity. Biol. Invasions 2017, 19, 2751–2765. [Google Scholar] [CrossRef]
- Panetta, D.F. Evaluating the performance of weed containment programmes. Divers. Distrib. 2012, 18, 1024–1032. [Google Scholar] [CrossRef]
- Morfe, T.A.; Weiss, J. Optimising government intestment at different stages of the weed invasion process. In Proceedings of the 15th Australian Weeds Conference, Adelaide, Australia, 24–28 September 2006; pp. 87–90. [Google Scholar]
- Page, A.R.; Lacey, K.L. Economic Impact Assessment of Australian Weed Biological Control Effort. Final Report; KL/AEC Group Ltd., CRC for Australian Weed Management: Glen Osmond, South Australia, 2005. [Google Scholar]
- Victorian Government. Invasive Plants and Animals Policy Framework. Available online: http://agriculture.vic.gov.au/agriculture/pests-diseases-and-weeds/protecting-victoria/invasive-plants-and-animals/invasive-plants-and-animals-policy-framework (accessed on 14 May 2020).
- Pickett, S.T.; Cadenasso, M.L.; Grove, J.M.; Nilon, C.H.; Pouyat, R.V.; Zipperer, W.C.; Costanza, R. Urban ecological systems: Linking terrestrial ecological, physical, and socioeconomic components of metropolitan areas. Annu. Rev. Ecol. Syst. 2001, 32, 127–157. [Google Scholar] [CrossRef] [Green Version]
- McLaren, D.; Lefoe, G.; Ede, F.; Dugdale, T. Highlighting the Complexity of Interactions between Peri-Urban Environments and Weed Management Using Case Studies from Southern Victoria. In Conflict and Change in Australia’s Peri-Urban Landscapes; Routledge: Abingdon, UK, 2016; pp. 207–221. [Google Scholar]
- Lawes, R.A.; Wallace, J.F. Monitoring an invasive perennial at the landscape scale with remote sensing. Ecol. Manag. Restor. 2008, 9, 53–59. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Hornbuckle, J.; Barton, J.L. Assessment of Aquatic Weed in Irrigation Channels Using UAV and Satellite Imagery. Water 2018, 10, 1497. [Google Scholar] [CrossRef] [Green Version]
- Khare, S.; Latifi, H.; Ghosh, S.K. Multi-scale assessment of invasive plant species diversity using Pléiades 1A, RapidEye and Landsat-8 data. Geocarto Int. 2018, 33, 681–698. [Google Scholar] [CrossRef]
- Walsh, S.J.; McCleary, A.L.; Mena, C.F.; Shao, Y.; Tuttle, J.P.; González, A.; Atkinson, R. QuickBird and Hyperion data analysis of an invasive plant species in the Galapagos Islands of Ecuador: Implications for control and land use management. Remote Sens. Environ. 2008, 112, 1927–1941. [Google Scholar] [CrossRef]
- Ahsan, N.; Xu, Z.; Murphy, R.; Sukkarieh, S. Weed Detection and Classification Using Low Altitude Aerial Images; Northern Tablelands Local Land Service and Australian Centre for Field Robotics, The University of Sydney: Sydney, Australia, 2016. [Google Scholar]
- Bertacchi, A.; Giannini, V.; Di Franco, C.; Silvestri, N. Using unmanned aerial vehicles for vegetation mapping and identification of botanical species in wetlands. Landsc. Ecol. Eng. 2019, 15, 231–240. [Google Scholar] [CrossRef]
- Kaneko, K.; Nohara, S. Review of effective vegetation mapping using the UAV (unmanned aerial vehicle) method. J. Geogr. Inf. Syst. 2014, 6, 733–742. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Quintanilla, C.; Peña, J.M.; Andújar, D.; Dorado, J.; Ribeiro, A.; López-Granados, F. Is the current state of the art of weed monitoring suitable for site-specific weed management in arable crops? Weed Res. 2018, 58, 259–272. [Google Scholar] [CrossRef]
- Shouse, M.; Liang, L.; Fei, S. Identification of understory invasive exotic plants with remote sensing in urban forests. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 525–534. [Google Scholar] [CrossRef]
- Müllerová, J.; Brůna, J.; Bartaloš, T.; Dvořák, P.; Vítková, M.; Pyšek, P. Timing is important: Unmanned aircraft vs. satellite imagery in plant invasion monitoring. Front. Plant Sci. 2017, 8, 887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature Learning Based Approach for Weed Classification Using High Resolution Aerial Images from a Digital Camera Mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Malmstrom, C.M.; Butterfield, H.S.; Planck, L.; Long, C.W.; Eviner, V.T. Novel fine-scale aerial mapping approach quantifies grassland weed cover dynamics and response to management. PLoS ONE 2017, 12, e0181665. [Google Scholar] [CrossRef] [Green Version]
- Sandino, J.; Gonzalez, F.; Mengersen, K.; Gaston, K.J. UAVs and Machine Learning Revolutionising Invasive Grass and Vegetation Surveys in Remote Arid Lands. Sensors 2018, 18, 605. [Google Scholar] [CrossRef] [Green Version]
- Tsai, F.; Chou, M.J. Texture augmented analysis of high resolution satellite imagery in detecting invasive plant species. J. Chin. Inst. Eng. 2006, 29, 581–592. [Google Scholar] [CrossRef]
- Singh, K.K.; Davis, A.J.; Meentemeyer, R.K. Detecting understory plant invasion in urban forests using LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 267–279. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and lidar data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Chance, C.M.; Coops, N.C.; Plowright, A.A.; Tooke, T.R.; Christen, A.; Aven, N. Invasive shrub mapping in an urban environment from hyperspectral and LiDAR-derived attributes. Front. Plant Sci. 2016, 7, 1528. [Google Scholar] [CrossRef] [Green Version]
- Bradley, B.A. Remote detection of invasive plants: A review of spectral, textural and phenological approaches. Biol. Invasions 2014, 16, 1411–1425. [Google Scholar] [CrossRef]
- Singh, K.K.; Chen, Y.-H.; Smart, L.; Gray, J.; Meentemeyer, R.K. Intra-annual phenology for detecting understory plant invasion in urban forests. ISPRS J. Photogramm. Remote Sens. 2018, 142, 151–161. [Google Scholar] [CrossRef]
- Lass, L.W.; Prather, T.S.; Glenn, N.F.; Weber, K.T.; Mundt, J.T.; Pettingill, J. A review of remote sensing of invasive weeds and example of the early detection of spotted knapweed (Centaurea maculosa) and babysbreath (Gypsophila paniculata) with a hyperspectral sensor. Weed Sci. 2005, 53, 242–251. [Google Scholar] [CrossRef]
- Hamilton, M.; Matthews, R.; Caldwell, J. Needle in a haystack-detecting hawkweeds using drones. In Proceedings of the 21st Australasian Weeds Conference, Manly, Sydney, Australia, 9–12 September 2018; pp. 9–13. [Google Scholar]
- Baron, J.; Hill, D.J.; Elmiligi, H. Combining image processing and machine learning to identify invasive plants in high-resolution images. Int. J. Remote Sens. 2018, 39, 5099–5118. [Google Scholar] [CrossRef]
- Artigas, F.; Pechmann, I.C. Balloon imagery verification of remotely sensed Phragmites australis expansion in an urban estuary of New Jersey, USA. Landsc. Urban Plan. 2010, 95, 105–112. [Google Scholar] [CrossRef]
- Khanna, S.; Santos, M.J.; Hestir, E.L.; Ustin, S.L. Plant community dynamics relative to the changing distribution of a highly invasive species, Eichhornia crassipes: A remote sensing perspective. Biol. Invasions 2012, 14, 717–733. [Google Scholar] [CrossRef]
- Cavalli, R.M.; Laneve, G.; Fusilli, L.; Pignatti, S.; Santini, F. Remote sensing water observation for supporting Lake Victoria weed management. J. Environ. Manag. 2009, 90, 2199–2211. [Google Scholar] [CrossRef]
- Dian Bah, M.; Hafiane, A.; Canals, R. Deep Learning with unsupervised data labeling for weeds detection on UAV images. arXiv 2018, arXiv:1805.12395. [Google Scholar]
- Truong, T.T.A.; Hardy, G.E.S.J.; Andrew, M.E. Contemporary Remotely Sensed Data Products Refine Invasive Plants Risk Mapping in Data Poor Regions. Front. Plant Sci. 2017, 8. [Google Scholar] [CrossRef] [Green Version]
- Clements, D.; Dugdale, T.; Hunt, T.; Fitch, R.; Hung, C.; Sukkarieh, S.; Xu, Z. Detection of alligator weed using an unmanned aerial vehicle. Plant Prot. Q. 2014, 29, 84–89. [Google Scholar]
- Müllerová, J.; Pyšek, P.; Jarošík, V.; Pergl, J. Aerial photographs as a tool for assessing the regional dynamics of the invasive plant species Heracleum mantegazzianum. J. Appl. Ecol. 2005, 42, 1042–1053. [Google Scholar] [CrossRef]
- Everitt, J.H.; Fletcher, R.S.; Elder, H.S.; Yang, C. Mapping giant salvinia with satellite imagery and image analysis. Environ. Monit. Assess. 2008, 139, 35–40. [Google Scholar] [CrossRef]
- Cuneo, P.; Jacobson, C.; Leishman, M. Landscape-scale detection and mapping of invasive African Olive (Olea europaea L. ssp. cuspidata Wall ex G. Don Ciferri) in SW Sydney, Australia using satellite remote sensing. Appl. Veg. Sci. 2009, 12, 145–154. [Google Scholar] [CrossRef]
- Gao, J.; Liao, W.; Nuyttens, D.; Lootens, P.; Vangeyte, J.; Pižurica, A.; He, Y.; Pieters, J.G. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 43–53. [Google Scholar] [CrossRef]
- Kattenborn, T.; Lopatin, J.; Förster, M.; Braun, A.C.; Fassnacht, F.E. UAV data as alternative to field sampling to map woody invasive species based on combined Sentinel-1 and Sentinel-2 data. Remote Sens. Environ. 2019, 227, 61–73. [Google Scholar] [CrossRef]
- Murawaat, S.; Qureshi, A.; Ahmad, S.; Shahid, Y. Weed Detection Using SVMs. Eng. Technol. Appl. Sci. Res. 2018, 8, 2412–2416. [Google Scholar]
- Göktoǧan, A.H.; Sukkarieh, S.; Bryson, M.; Randle, J.; Lupton, T.; Hung, C. A Rotary-wing Unmanned Air Vehicle for Aquatic Weed Surveillance and Management. J. Intell. Robot. Syst. 2009, 57, 467. [Google Scholar] [CrossRef]
- Olsen, A.; Konovalov, D.A.; Philippa, B.; Ridd, P.; Wood, J.C.; Johns, J.; Banks, W.; Girgenti, B.; Kenny, O.; Whinney, J.; et al. DeepWeeds: A Multiclass Weed Species Image Dataset for Deep Learning. Sci. Rep. 2019, 9, 2058. [Google Scholar] [CrossRef]
- Teimouri, N.; Dyrmann, M.; Nielsen, P.R.; Mathiassen, S.K.; Somerville, G.J.; Jørgensen, R.N. Weed Growth Stage Estimator Using Deep Convolutional Neural Networks. Sensors 2018, 18, 1580. [Google Scholar] [CrossRef] [Green Version]
- Sa, I.; Chen, Z.; Popović, M.; Khanna, R.; Liebisch, F.; Nieto, J.; Siegwart, R. WeedNet: Dense Semantic Weed Classification Using Multispectral Images and MAV for Smart Farming. IEEE Robot. Autom. Lett. 2018, 3, 588–595. [Google Scholar] [CrossRef] [Green Version]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Li, X.; Shao, G. Object-Based Land-Cover Mapping with High Resolution Aerial Photography at a County Scale in Midwestern USA. Remote Sens. 2014, 6, 11372–11390. [Google Scholar] [CrossRef] [Green Version]
- Ling, F.; Li, X.; Xiao, F.; Fang, S.; Du, Y. Object-based sub-pixel mapping of buildings incorporating the prior shape information from remotely sensed imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 283–292. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A.; Grove, M. Object-based Land Cover Classification and Change Analysis in the Balitmore Metropolitan Area Using Multitemporal High Resolution Remote Sensing Data. Sensors 2008, 8, 1613–1636. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Christophe, E.; Inglada, J. Object Counting in High Resolution Remote Sensing Images with OTB. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Cape Town, South Africa, 12–17 July 2009; pp. 737–740. [Google Scholar]
- Mayer, H. Automatic Object Extraction from Aerial Imagery—A Survey Focusing on Buildings. Comput. Vis. Image Underst. 1999, 74, 138–149. [Google Scholar] [CrossRef] [Green Version]
- Tsai, Y.; Stow, D.; Weeks, J. Comparison of Object-Based Image Analysis Approaches to Mapping New Buildings in Accra, Ghana Using Multi-Temporal Quickbird Satellite Imagery. Remote Sens. 2011, 3, 2707–2726. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karantzalos, K.; Arglalas, D. A Region-based Level Set Segmentation for Automatic Detection of Man-made Objects from Aerial and Satellite Images. Photogramm. Eng. Remote Sens. 2009, 75, 667–677. [Google Scholar] [CrossRef]
- Jacquin, A.; Misakova, L.; Gay, M. A hybrid object-based classification approach for mapping urban sprawl in periurban environment. Landsc. Urban Plan. 2008, 84, 152–165. [Google Scholar] [CrossRef]
- Baltsavias, E.P. Object extraction and revision by image analysis using existing geodata and knowledge: Current status and steps towards operational systems. ISPRS J. Photogramm. Remote Sens. 2004, 58, 129–151. [Google Scholar] [CrossRef]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methdology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Sammouda, R.; Adgaba, N.; Touir, A.; Al-Ghamdi, A. Agriculture satellite image segmentation using a modified artificial Hopfield neural network. Comput. Hum. Behav. 2014, 30, 436–441. [Google Scholar] [CrossRef]
- Drăguţ, L.; Blaschke, T. Automated classification of landform elements using object-based image analysis. Geomorphology 2006, 81, 330–344. [Google Scholar] [CrossRef]
- Aguilar, M.A.; Nemmaoui, A.; Novelli, A.; Aguilar, F.J.; Lorca, A.G. Object-Based Greenhouse Mapping Using Very High Resolution Satellite Data and Landsat 8 Time Series. Remote Sens. 2016, 8, 513. [Google Scholar] [CrossRef] [Green Version]
- Sheffield, K.; Hunnam, J.; Cuzner, T.; Morse-McNabb, E.; Sloan, S.; Nunan, J.; Smith, J.; Harvey, W.; Lewis, H. Automated identification of intensive animal production locations from aerial photography. Aust. Vet. J. 2018, 96, 323–331. [Google Scholar] [CrossRef]
- Pereira, L.A.; Nakamura, R.Y.; De Souza, G.F.; Martins, D.; Papa, J.P. Aquatic weed automatic classification using machine learning techniques. Comput. Electron. Agric. 2012, 87, 56–63. [Google Scholar] [CrossRef]
- Landenberger, R.E.; Warner, T.A.; McGraw, J.B. Spatial patterns of female Ailanthus altissima across an urban-to-rural land use gradient. Urban Ecosyst. 2009, 12, 437. [Google Scholar] [CrossRef]
- Rodgers, L.; Pernas, T.; Redwine, J.; Shamblin, B.; Bruscia, S. Multiscale Invasive Plant Monitoring: Experiences from the Greater Everglades Restoration Area. Weed Technol. 2017, 32, 11–19. [Google Scholar] [CrossRef]
- Sukkarieh, S. Aquatic Weed Surveillance Using Robotic Aircraft; The University of Sydney and Land & Water Australia, Australian Government: Canberra, Australia, 2009.
- Department of Environment Land Water and Planning. Coordinated Imagery Program. Available online: https://www2.delwp.vic.gov.au/maps/maps-and-services/coordinated-imagery-program (accessed on 21 May 2020).
- Asha, K.; Mahore, A.; Malkani, P.; Singh, A.K. Robotics-automation and sensor-based approaches in weed detection and control: A review. IJCS 2020, 8, 542–550. [Google Scholar]
- Sujaritha, M.; Annadurai, S.; Satheeshkumar, J.; Kowshik Sharan, S.; Mahesh, L. Weed detecting robot in sugarcane fields using fuzzy real time classifier. Comput. Electron. Agric. 2017, 134, 160–171. [Google Scholar] [CrossRef]
- Truman, M.; Brown, J.; Wallance, N.; Eiffert, S.; Sukkarieh, S. Demonstrating the Use of Ground Robotics for Data Gathering and Analysis to Assist Farming Decisions; Meat and Livestock Australia and Australian Centre for Field Robotics, The University of Sydney: North Sydney, Australia, 2018. [Google Scholar]
- Akasaka, M.; Osawa, T.; Ikegami, M. The role of roads and urban area in occurrence of an ornamental invasive weed: A case of Rudbeckia laciniata L. Urban Ecosyst. 2015, 18, 1021–1030. [Google Scholar] [CrossRef]
- Sullivan, J.J.; Meurk, C.; Whaley, K.J.; Simcock, R. Restoring native ecosystems in urban Auckland: Urban soils, isolation, and weeds as impediments to forest establishment. N. Z. J. Ecol. 2009, 33, 60–71. [Google Scholar]
- Sullivan, J.J.; Williams, P.A.; Timmins, S.M.; Smale, M.C. Distribution and spread of environmental weeds along New Zealand roadsides. N. Z. J. Ecol. 2009, 33, 190–204. [Google Scholar]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectral imagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- GISIN. Global Invasive Species Information Network, Providing Free and Open Access to Invasive Species Data. Available online: http://www.gisin.org (accessed on 21 May 2020).
- University of Georgia—Centre for Invasive Species and Ecosystem Health. Early Detection & Distribution Mapping System (EDDMapS). Find. Map. Track. Available online: https://www.eddmaps.org/ (accessed on 21 May 2020).
- Sinden, J.; Jones, R.; Hester, S.; Odom, D.; Kalisch, C.; James, R.; Griffith, G. The Economic Impact of Weeds in Australia; CRC for Australian Weed Management: Glen Osmond, South Australia, 2004.
- Llewellyn, R.S.; Ronning, D.; Ouzman, J.; Walker, S.; Mayfield, A.; Clarke, M. Impact of Weeds on Australian Grain Production: The Cost of Weeds to Australian Grain Growers and the Adoption of Weed Management and Tillage Practices; Report for GRDC; CSIRO: Kingston, ACT, Australia, 2016. [Google Scholar]
- Kaplan, H.; van Niekerk, A.; Le Roux, J.J.; Richardson, D.M.; Wilson, J.R. Incorporating risk mapping at multiple spatial scales into eradication management plans. Biol. Invasions 2014, 16, 691–703. [Google Scholar] [CrossRef]
- He, K.S.; Bradley, B.A.; Cord, A.F.; Rocchini, D.; Tuanmu, M.-N.; Schmidtlein, S.; Turner, W.; Wegmann, M.; Pettorelli, N. Will remote sensing shape the next generation of species distribution models? Remote Sens. Ecol. Conserv. 2015, 1, 4–18. [Google Scholar] [CrossRef] [Green Version]
- Rocchini, D.; Andreo, V.; Förster, M.; Garzon-Lopez, C.X.; Gutierrez, A.P.; Gillespie, T.W.; Hauffe, H.C.; He, K.S.; Kleinschmit, B.; Mairota, P.; et al. Potential of remote sensing to predict species invasions: A modelling perspective. Prog. Phys. Geogr. Earth Environ. 2015, 39, 283–309. [Google Scholar] [CrossRef] [Green Version]
- Halmy, M.W.A.; Fawzy, M.; Ahmed, D.A.; Saeed, N.M.; Awad, M.A. Monitoring and predicting the potential distribution of alien plant species in arid ecosystem using remotely-sensed data. Remote Sens. Appl. Soc. Environ. 2019, 13, 69–84. [Google Scholar] [CrossRef]
- Steel, J.; Weiss, J.; Morfe, T. To weed or not to weed? The application of an agent-based model to determine the costs and benefits of different management strategies. Plant Prot. Q. 2014, 29, 101. [Google Scholar]
- Von der Lippe, M.; Kowarik, I. Long distance dispersal of plants by vehicles as a driver of plant invasions. Conserv. Biol. 2007, 21, 986–996. [Google Scholar] [CrossRef]
Figure 1.
Estimated return on government investment for four weed biosecurity approaches (prevention, eradication, containment and asset-based protection) undertaken at increasing time since weed invasion and area occupied by the weed [26].
Figure 1.
Estimated return on government investment for four weed biosecurity approaches (prevention, eradication, containment and asset-based protection) undertaken at increasing time since weed invasion and area occupied by the weed [26].

Figure 2.
Outline of the Weed Aerial Surveillance Program (WASP) framework, incorporating a remote sensing approach development matrix (TAMM, Table 3). Core components of the WASP framework are highlighted against the light grey background.
Figure 2.
Outline of the Weed Aerial Surveillance Program (WASP) framework, incorporating a remote sensing approach development matrix (TAMM, Table 3). Core components of the WASP framework are highlighted against the light grey background.


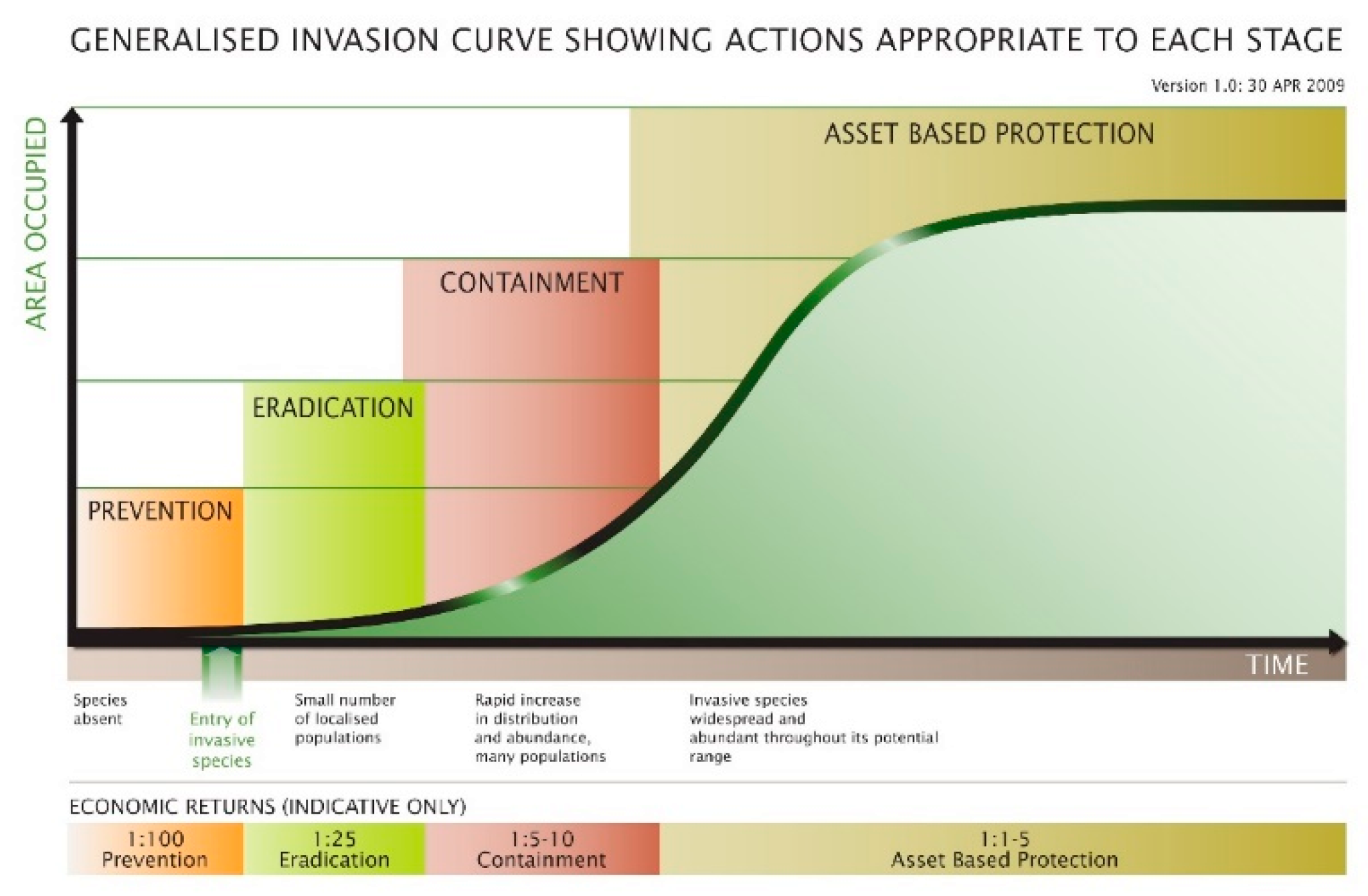{kind=link}
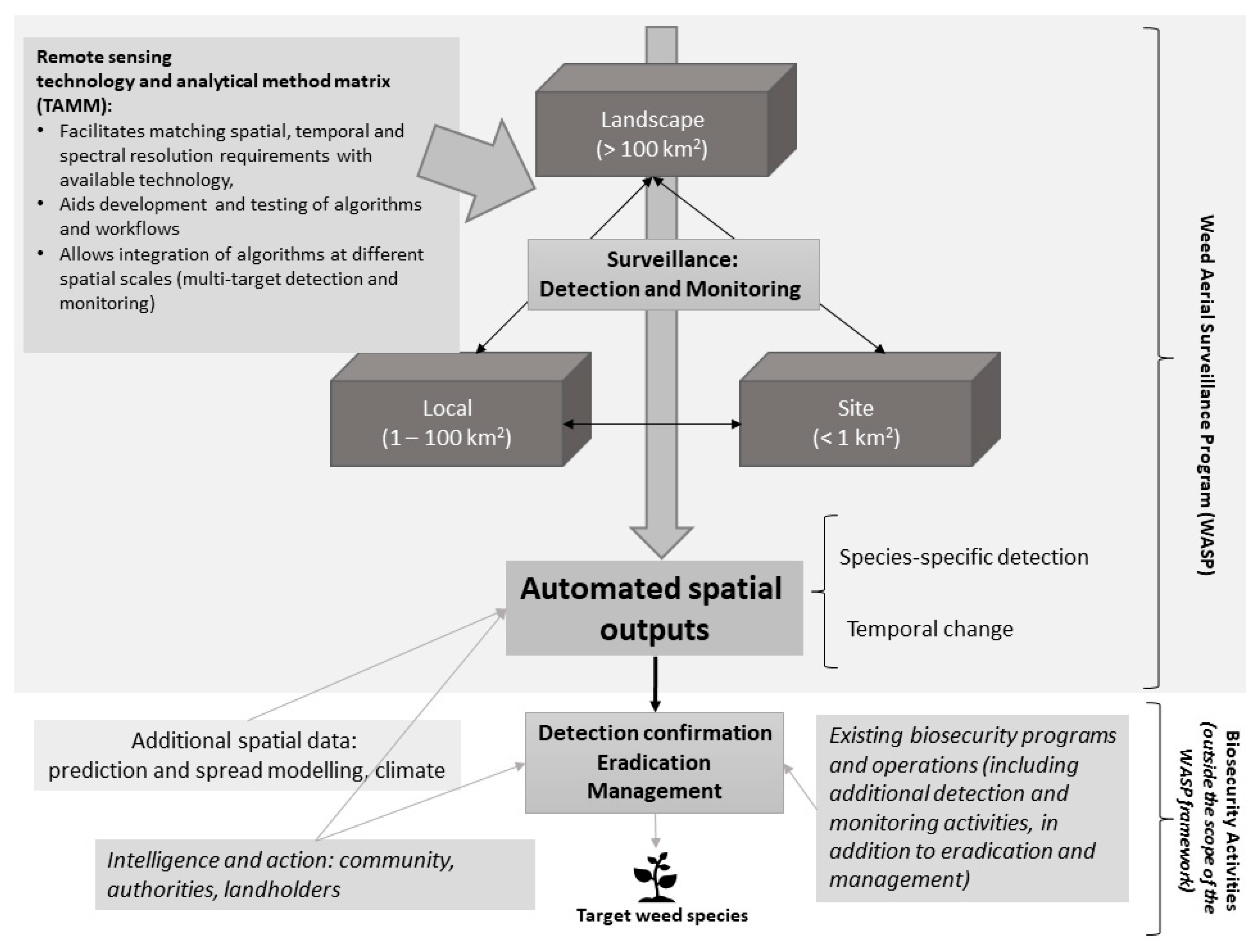{kind=link}
Table 1.
Summary of weed biosecurity program components and relative importance of key considerations from biosecurity and remote sensing perspectives (+ = lower relative importance, +++++ = higher relative importance).
Table 1.
Summary of weed biosecurity program components and relative importance of key considerations from biosecurity and remote sensing perspectives (+ = lower relative importance, +++++ = higher relative importance).
| Biosecurity Program Component | ||||
|---|---|---|---|---|
| Considerations | Detection (unknown populations and locations of weed) | Monitoring (known populations and locations of weed) | Management and eradication (known populations and locations of weed) | |
| Biosecurity | • Detect new infestations of weeds • Minimum detection size | +++++ +++++ | + + | ++ +++ |
| • Monitor changes in distribution and abundance | + | +++++ | +++++ | |
| • Level of confidence in detecting species (probability of detection/classification and correct identification) | +++++ | +++++ | +++++ | |
| • Timely collation and distribution of information | +++++ | +++ | +++ | |
| • Assist with compliance activities | + | +++++ | +++++ | |
| Remote sensing | • Spatial resolution | +++++ | +++++ | +++++ |
| • Synoptic data capture | +++++ | +++++ | + | |
| • Visibility of the weed | +++++ | +++++ | +++++ | |
| • Temporal frequency and timing of image acquisition | ++ | ++++ | ++ | |
| • Integration of remotely sensed data with other information to optimize accuracy | ++ | ++ | ++ | |
| • Response of weed to control methods and impact on detection methods | + | +++ | +++++ | |
| • Targeted data capture | + | + | +++++ | |
Table 2.
Examples of image classification approaches (grouped by remote sensing platform) used in weed detection applications.
Table 2.
Examples of image classification approaches (grouped by remote sensing platform) used in weed detection applications.
| Classification Approach | Selected Examples |
|---|---|
| Manual image interpretation | • UAV: Bertacchi et al. [34], Clements et al. [57], Kaneko and Nohara [35] • Aircraft: Kaneko and Nohara [35], Müllerová et al. [58], Clements et al. [18] |
| Unsupervised classification (e.g., ISODATA algorithm) | • Aircraft: Malmstrom et al. [41] • Commercial satellite: Everitt et al. [59], Walsh et al. [32] |
| Supervised classification (e.g., maximum likelihood) | • Aircraft: Malmstrom et al. [41] • Commercial satellite: Tsai and Chou [43] • Government satellite: Cuneo et al. [60] |
| Decision tree and CART approaches | • UAV: Brinkhoff et al. [30] |
| Random Forests (RF) | • On-ground: Gao et al. [61] • UAV: Baron et al. [51] • Aircraft: Chance et al. [46], Singh et al. [44] • Commercial satellite: Singh et al. [44] • Government satellite: Kattenborn et al. [62], Singh et al. [48] |
| Spectral Angle Mapper (SAM) | • Aircraft: Lass et al. [49], Chance et al. [46] • Commercial satellite: Ahsan et al. [33] • Government satellite: Ahsan et al. [33] |
| Support Vector Machines (SVM) | • On-ground: Murawaat et al. [63] • UAV: Göktoǧan et al. [64] • Government satellite: Xie et al. [3] |
| Deep learning (e.g., convolutional neural networks (CNN)) | • On-ground: Olsen et al. [65], Teimouri et al. [66] • UAV: Dian Bah et al. [55], Sa et al. [67], Ahsan et al. [33] |
Table 3.
Sample Remote Sensing Technology and Analytical Method Matrix (TAMM), a component of the Weed Aerial Surveillance Program (WASP) framework, with example key considerations to guide development of image analysis workflows and approaches.
Table 3.
Sample Remote Sensing Technology and Analytical Method Matrix (TAMM), a component of the Weed Aerial Surveillance Program (WASP) framework, with example key considerations to guide development of image analysis workflows and approaches.
| Biosecurity | |||||
|---|---|---|---|---|---|
| Remote sensing | Physical attributes | Phenology | Biosecurity program component | Operational requirements and resources | |
| Spatial | What is the growth habit/size of the target species? | What extent is required for analysis: site, local or landscape? What is the minimum detection size required to support effective eradication and management? | |||
| Temporal | Are any distinguishing features (e.g., flowers) more prominent at specific times of the year? | Is there an optimal time of year to distinguish the target? | Is regular or targeted image acquisition required? How often is new imagery required? When is new imagery required? | ||
| Spectral | Are any distinguishing features linked to spectral information such as flower or leaf colour? | Are there any phenological characteristics which are determined by changes in spectral information (e.g., changes in colour)? | |||
| Imagery/Platform | What is the spatial resolution of the imagery? | What are the temporal characteristics of the platform (e.g., is image acquisition timing fixed or flexible, and how often)? | What is the image swathe captured by the platform? | Are there restrictions to consider (e.g., weather, legal, platform availability)? What resources (time, money and expertise) are available to acquire imagery? | |
| Analysis | Is the target more suited to a pixel or object-based analysis? | Is multi-temporal analysis required? | What information is required (e.g., presence/absence, extent/area, probability)? What calibration and validation data is available, or able to be collected? | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sheffield, K.; Dugdale, T. Supporting Urban Weed Biosecurity Programs with Remote Sensing. Remote Sens. 2020, 12, 2007. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122007
AMA Style
Sheffield K, Dugdale T. Supporting Urban Weed Biosecurity Programs with Remote Sensing. Remote Sensing. 2020; 12(12):2007. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122007
Chicago/Turabian StyleSheffield, Kathryn, and Tony Dugdale. 2020. "Supporting Urban Weed Biosecurity Programs with Remote Sensing" Remote Sensing 12, no. 12: 2007. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12122007
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.