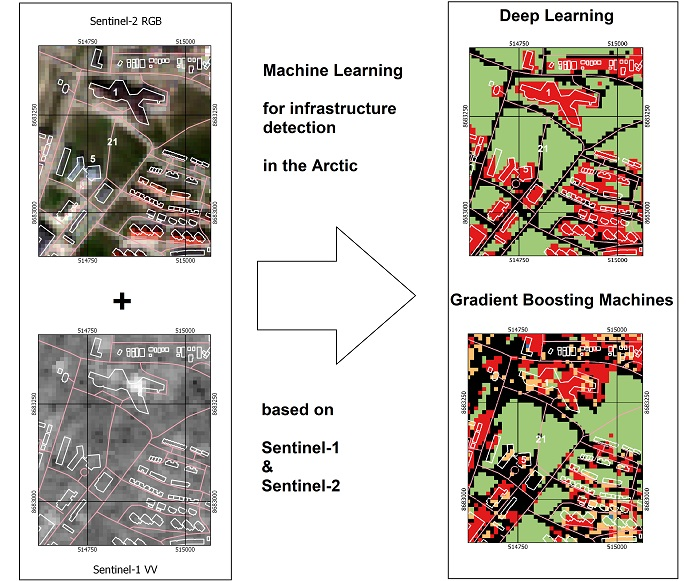
Towards Circumpolar Mapping of Arctic Settlements and Infrastructure Based on Sentinel-1 and Sentinel-2



Abstract
:
1. Introduction
2. Study Areas and Data
2.1. Satellite Data
2.2. Study Areas and Calibration and Validation Data
3. Methods
3.1. Preprocessing of Satellite Data
3.2. Calibration and Model Assessment Data Preparation
3.3. Gradient Boosting Machine Learning
3.4. Machine Learning Based on Neural Networks—Deep Learning
3.5. Validation Strategy
4. Results
4.1. Normalization Parameters for HV and VH and Performance of the Adapted Super-Resolution Scheme
4.2. Model Efficiency Assessment
4.3. Assessment with External Data
4.4. Surface Types and Building Properties
5. Discussion
5.1. Sensor-Specific and Scene Selection Issues
5.2. Suitability of Algorithms
5.3. Suitability of Training and Validation Data
5.4. Target Classes
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IPCC. IPCC Special Report on the Ocean and Cryosphere in a Changing Climate; 2019. Available online: https://www.ipcc.ch/srocc/chapter/chapter-3-2/ (accessed on 22 July 2020).
- Kumpula, T.; Forbes, B.C.; Stammler, F.; Meschtyb, N. Dynamics of a Coupled System: Multi-Resolution Remote Sensing in Assessing Social-Ecological Responses during 25 Years of Gas Field Development in Arctic Russia. Remote Sens. 2012, 4, 1046–1068. [Google Scholar] [CrossRef] [Green Version]
- Raynolds, M.K.; Walker, D.A.; Ambrosius, K.J.; Brown, J.; Everett, K.R.; Kanevskiy, M.; Kofinas, G.P.; Romanovsky, V.E.; Shur, Y.; Webber, P.J. Cumulative geoecological effects of 62 years of infrastructure and climate change in ice-rich permafrost landscapes, Prudhoe Bay Oilfield, Alaska. Glob. Chang. Biol. 2014, 20, 1211–1224. [Google Scholar] [CrossRef] [PubMed]
- Rees, W.G.; Williams, M. Monitoring changes in land cover induced by atmospheric pollution in the Kola Peninsula, Russia, using Landsat-MSS data. Int. J. Remote Sens. 1997, 18, 1703–1723. [Google Scholar] [CrossRef]
- Tommervik, H.; Hogda, K.A.; Solheim, L. Monitoring vegetation changes in Pasvik (Norway) and Pechenga in Kola Peninsula (Russia) using multitemporal Landsat MSS/TM data. Remote. Sens. Environ. 2003, 85, 370–388. [Google Scholar] [CrossRef]
- Toutoubalina, O.V.; Rees, W.G. Remote sensing of industrial impact on Arctic vegetation around Norilsk, northern Siberia: Preliminary results. Int. J. Remote Sens. 1999, 20, 2979–2990. [Google Scholar] [CrossRef]
- Vilchek, G.E.; Tishkov, A.A. Usinsk oil spill—Environmental catastrophe or routine event? In Disturbance and Recovery in Arctic Lands: An Ecological Perspective; Crawford, R.M.M., Ed.; Kluwer: Dordrecht, The Netherlands, 1997; pp. 411–420. [Google Scholar]
- Walker, T.R.; Crittenden, P.D.; Dauvalter, V.A.; Jones, V.; Kuhry, P.; Loskutova, O.; Mikkola, K.; Nikula, A.; Patova, E.; Ponomarev, V.I.; et al. Multiple indicators of human impacts on the environment in the Pechora Basin, north-eastern European Russia. Ecol. Indic. 2009, 9, 765–779. [Google Scholar] [CrossRef]
- Virtanen, T.; Mikkola, K.; Patova, E.; Nikula, A. Satellite image analysis of human caused changes in the tundra vegetation around the city of Vorkuta, north-European Russia. Environ. Pollut. 2002, 120, 647–658. [Google Scholar] [CrossRef] [Green Version]
- Virtanen, T.; Mikkola, K.; Nikula, A. Satellite image based vegetation classification of a large area using limited ground reference data: A case study in the Usa Basin, north-east European Russia. Pol. Res. 2004, 23, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Fortier, D.; McKenzie, J.M.; Sliger, M. Impact of heat advection on the thermal regime of roads built on permafrost. Hydrol. Process. 2020, 34, 1647–1664. [Google Scholar] [CrossRef]
- Streletskiy, D.A.; Shiklomanov, N.I.; Nelson, F.E. Permafrost, Infrastructure, and Climate Change: A GIS-Based Landscape Approach to Geotechnical Modeling. Arct. Antarct. Alp. Res. 2012, 44, 368–380. [Google Scholar] [CrossRef] [Green Version]
- Hjort, J.; Karjalainen, O.; Aalto, J.; Westermann, S.; Romanovsky, V.E.; Nelson, F.E.; Etzelmüller, B.; Luoto, M. Degrading permafrost puts Arctic infrastructure at risk by mid-century. Nat. Commun. 2018, 9, 5147. [Google Scholar] [CrossRef] [PubMed]
- Suter, L.; Streletskiy, D.; Shiklomanov, N. Assessment of the cost of climate change impacts on critical infrastructure in the circumpolar Arctic. Pol. Geogr. 2019, 42, 267–286. [Google Scholar] [CrossRef]
- Irrgang, A.M.; Lantuit, H.; Gordon, R.R.; Piskor, A.; Manson, G.K. Impacts of past and future coastal changes on the Yukon coast—Threats for cultural sites, infrastructure, and travel routes. Arct. Sci. 2019, 5, 107–126. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Huang, C.; Brown de Colstoun, E.; Tilton, J.; Tan, B. Global Human Built-Up and Settlement Extent (HBASE) Dataset from Landsat; NASA Socioeconomic Data and Applications Center (SEDAC): Palisades, NY, USA, 2017. [Google Scholar] [CrossRef]
- Esch, T.; Bachofer, F.; Heldens, W.; Hirner, A.; Marconcini, M.; Palacios-Lopez, D.; Roth, A.; Üreyen, S.; Zeidler, J.; Dech, S.; et al. Where We Live—A Summary of the Achievements and Planned Evolution of the Global Urban Footprint. Remote Sens. 2018, 10, 895. [Google Scholar] [CrossRef] [Green Version]
- Besussi, E.; Chin, N.; Batty, M.; Longley, P. The Structure and Form of Urban Settlements. In Remote Sensing of Urban and Suburban Areas; Springer: Dordrecht, The Netherlands, 2010; pp. 13–31. [Google Scholar] [CrossRef]
- Bartsch, A.; Höfler, A.; Kroisleitner, C.; Trofaier, A.M. Land Cover Mapping in Northern High Latitude Permafrost Regions with Satellite Data: Achievements and Remaining Challenges. Remote Sens. 2016, 8, 979. [Google Scholar] [CrossRef] [Green Version]
- Brown de Colstoun, E.; Huang, C.; Wang, P.; Tilton, J.; Tan, B.; Phillips, J.; Niemczura, S.; Ling, P.Y.; Wolfe, R. Global Man-Made Impervious Surface (GMIS) Dataset from Landsat; NASA Socioeconomic Data and Applications Center (SEDAC): Palisades, NY, USA, 2017. [Google Scholar] [CrossRef]
- Kumpula, T.; Forbes, B.; Stammler, F. Remote Sensing and Local Knowledge of Hydrocarbon Exploitation: The Case of Bovanenkovo, Yamal Peninsula, West Siberia, Russia. Arctic 2010, 63, 165–178. [Google Scholar] [CrossRef]
- Blasco, J.M.D.; Fitrzyk, M.; Patruno, J.; Ruiz-Armenteros, A.M.; Marconcini, M. Effects on the Double Bounce Detection in Urban Areas Based on SAR Polarimetric Characteristics. Remote Sens. 2020, 12, 1187. [Google Scholar] [CrossRef] [Green Version]
- Chini, M.; Pelich, R.; Hostache, R.; Matgen, P.; Lopez-Martinez, C. Towards a 20 m Global Building Map from Sentinel-1 SAR Data. Remote Sens. 2018, 10, 1833. [Google Scholar] [CrossRef] [Green Version]
- Iannelli, G.C.; Gamba, P. Urban Extent Extraction Combining Sentinel Data in the Optical and Microwave Range. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2209–2216. [Google Scholar] [CrossRef]
- Esch, T.; Marconcini, M.; Felbier, A.; Roth, A.; Heldens, W.; Huber, M.; Schwinger, M.; Taubenbock, H.; Muller, A.; Dech, S. Urban Footprint Processor—Fully Automated Processing Chain Generating Settlement Masks From Global Data of the TanDEM-X Mission. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1617–1621. [Google Scholar] [CrossRef] [Green Version]
- Corbane, C.; Lemoine, G.; Pesaresi, M.; Kemper, T.; Sabo, F.; Ferri, S.; Syrris, V. Enhanced automatic detection of human settlements using Sentinel-1 interferometric coherence. Int. J. Remote Sens. 2017, 39, 842–853. [Google Scholar] [CrossRef]
- Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad; Pal, S.; Liou, Y.A.; Rahman, A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sens. 2020, 12, 1135. [Google Scholar] [CrossRef] [Green Version]
- Stromann, O.; Nascetti, A.; Yousif, O.; Ban, Y. Dimensionality Reduction and Feature Selection for Object-Based Land Cover Classification based on Sentinel-1 and Sentinel-2 Time Series Using Google Earth Engine. Remote Sens. 2019, 12, 76. [Google Scholar] [CrossRef] [Green Version]
- Xiang, D.; Tang, T.; Ban, Y.; Su, Y.; Kuang, G. Unsupervised polarimetric SAR urban area classification based on model-based decomposition with cross scattering. ISPRS J. Photogramm. Remote Sens. 2016, 116, 86–100. [Google Scholar] [CrossRef]
- Stasolla, M.; Gamba, P. Spatial Indexes for the Extraction of Formal and Informal Human Settlements From High-Resolution SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2008, 1, 98–106. [Google Scholar] [CrossRef]
- Woodhouse, I. Introduction to Microwave Remote Sensing; Taylor & Francis: New York, NY, USA, 2006. [Google Scholar]
- Radoux, J.; Chomé, G.; Jacques, D.; Waldner, F.; Bellemans, N.; Matton, N.; Lamarche, C.; d’Andrimont, R.; Defourny, P. Sentinel-2’s Potential for Sub-Pixel Landscape Feature Detection. Remote Sens. 2016, 8, 488. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Shi, P.; Xie, D.; Zhao, Y. Improving the normalized difference built-up index to map urban built-up areas using a semiautomatic segmentation approach. Remote Sens. Lett. 2010, 1, 213–221. [Google Scholar] [CrossRef] [Green Version]
- Xu, H. A new index for delineating built-up land features in satellite imagery. Int J. Remote Sens. 2008, 29, 4269–4276. [Google Scholar] [CrossRef]
- Pesaresi, M.; Corbane, C.; Julea, A.; Florczyk, A.; Syrris, V.; Soille, P. Assessment of the Added-Value of Sentinel-2 for Detecting Built-up Areas. Remote Sens. 2016, 8, 299. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Huang, X.; Liu, H. Unsupervised Deep Feature Learning for Urban Village Detection from High-Resolution Remote Sensing Images. Photogramm. Eng. Remote Sens. 2017, 83, 567–579. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Wolff, E. Very High Resolution Object-Based Land Use–Land Cover Urban Classification Using Extreme Gradient Boosting. IEEE Geosci. Remote Sens. Lett. 2018, 15, 607–611. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Chowdhury, P.K.R.; McKee, J.; Yang, H.L.; Weaver, J.; Bhaduri, B. Exploiting deep learning and volunteered geographic information for mapping buildings in Kano, Nigeria. Sci. Data 2018, 5. [Google Scholar] [CrossRef] [PubMed]
- Herfort, B.; Li, H.; Fendrich, S.; Lautenbach, S.; Zipf, A. Mapping Human Settlements with Higher Accuracy and Less Volunteer Efforts by Combining Crowdsourcing and Deep Learning. Remote Sens. 2019, 11, 1799. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Zhang, Z.; Yao, W.; Datcu, M.; Xiong, H.; Yu, W. OpenSARUrban: A Sentinel-1 SAR Image Dataset for Urban Interpretation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 187–203. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining—KDD 16, San Francisco, CA, USA, 13–17 August 2016; ACM Press: New York, NY, USA, 2016. [Google Scholar] [CrossRef] [Green Version]
- Mboga, N.; Persello, C.; Bergado, J.; Stein, A. Detection of Informal Settlements from VHR Images Using Convolutional Neural Networks. Remote Sens. 2017, 9, 1106. [Google Scholar] [CrossRef] [Green Version]
- Persello, C.; Stein, A. Deep Fully Convolutional Networks for the Detection of Informal Settlements in VHR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2325–2329. [Google Scholar] [CrossRef]
- Wurm, M.; Stark, T.; Zhu, X.X.; Weigand, M.; Taubenböck, H. Semantic segmentation of slums in satellite images using transfer learning on fully convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2019, 150, 59–69. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Lecture Notes in Computer Science; Springer International Publishing Switzerland: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Kong, Q.; Zhang, C.; You, S.; Wei, H.; Sun, R.; Li, L. A new road extraction method using Sentinel-1 SAR images based on the deep fully convolutional neural network. Eur. J. Remote Sens. 2019, 52, 572–582. [Google Scholar] [CrossRef] [Green Version]
- Lefebvre, A.; Sannier, C.; Corpetti, T. Monitoring Urban Areas with Sentinel-2A Data: Application to the Update of the Copernicus High Resolution Layer Imperviousness Degree. Remote Sens. 2016, 8, 606. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Li, Z.; Pan, J. Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification. Sensors 2018, 18, 373. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schubert, A.; Miranda, N.; Geudtner, D.; Small, D. Sentinel-1A/B Combined Product Geolocation Accuracy. Remote Sens. 2017, 9, 607. [Google Scholar] [CrossRef] [Green Version]
- Bartsch, A.; Widhalm, B.; Leibman, M.; Ermokhina, K.; Kumpula, T.; Skarin, A.; Wilcox, E.J.; Jones, B.M.; Frost, G.V.; Höfler, A.; et al. Feasibility of tundra vegetation height retrieval from Sentinel-1 and Sentinel-2 data. Remote Sens. Environ. 2020, 237, 111515. [Google Scholar] [CrossRef]
- ESA. Sentinel-1. ESA’s Radar Observatory Mission for GMES Operational Services; Technical Report SP-1322/1; 2012. Available online: http://esamultimedia.esa.int/multimedia/publications/SP-1322_1/ (accessed on 22 July 2020).
- Widhalm, B.; Bartsch, A.; Goler, R. Simplified Normalization of C-Band Synthetic Aperture Radar Data for Terrestrial Applications in High Latitude Environments. Remote Sens. 2018, 10, 551. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Aalberg, A.; Høyland, K.; Lubbad, R.; Løset, S.; Ingeman-Nielsen, T. Calibration Data for Infrastructure Mapping in Svalbard, Link to Files. 2018. Available online: https://doi.pangaea.de/10.1594/PANGAEA.895950 (accessed on 22 July 2020). [CrossRef]
- ESA. Sentinel-2 User Handbook; Technical Report; 2015. Available online: https://sentinels.copernicus.eu/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 22 July 2020).
- Obu, J.; Westermann, S.; Kääb, A.; Bartsch, A. Ground Temperature Map, 2000–2016, Northern Hemisphere Permafrost. 2018. Available online: https://doi.pangaea.de/10.1594/PANGAEA.888600 (accessed on 22 July 2020). [CrossRef]
- Obu, J.; Westermann, S.; Bartsch, A.; Berdnikov, N.; Christiansen, H.H.; Dashtseren, A.; Delaloye, R.; Elberling, B.; Etzelmüller, B.; Kholodov, A.; et al. Northern Hemisphere permafrost map based on TTOP modelling for 2000-2016 at 1?km2 scale. Earth-Sci. Rev. 2019, 193, 299–316. [Google Scholar] [CrossRef]
- Walker, D.A.; Raynolds, M.K.; Buchhorn, M.; Peirce, J.L. Landscape and Permafrost Changes in the Prudhoe Bay Oilfield, Alaska; Alaska Geobotany Center Publication AGC 14-01; Alaska Geobotany Center: Fairbanks, AK, USA, 2014. [Google Scholar]
- lorczyk, A.J.; Corbane, C.; Ehrlich, D.; Freire, S.; Kemper, T.; Maffenini, L.; Melchiorri, M.; Pesaresi, M.; Politis, P.; Schiavina, M.; et al. GHSL Data Package 2019; Technical Report; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- Ingeman-Nielsen, T.; Vakulenko, I. Calibration and Validation Data for Infratructure Mapping, Greenland, Link to Files. 2018. Available online: https://doi.pangaea.de/10.1594/PANGAEA.895949 (accessed on 22 July 2020). [CrossRef]
- Chollet, F. Deep Learning with Python; Manning: Shelter Island, NY, USA, 2017. [Google Scholar]
- Lanaras, C.; Bioucas-Dias, J.; Galliani, S.; Baltsavias, E.; Schindler, K. Super-resolution of Sentinel-2 images: Learning a globally applicable deep neural network. ISPRS J. Photogramm. Remote Sens. 2018, 146, 305–319. [Google Scholar] [CrossRef] [Green Version]
- Ali, I.; Cao, S.; Naeimi, V.; Paulik, C.; Wagner, W. Methods to Remove the Border Noise From Sentinel-1 Synthetic Aperture Radar Data: Implications and Importance For Time-Series Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 777–786. [Google Scholar] [CrossRef] [Green Version]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Brisco, B.; Homayouni, S.; Gill, E.; DeLancey, E.R.; Bourgeau-Chavez, L. Big Data for a Big Country: The First Generation of Canadian Wetland Inventory Map at a Spatial Resolution of 10-m Using Sentinel-1 and Sentinel-2 Data on the Google Earth Engine Cloud Computing Platform. Can. J. Remote Sens. 2020, 46, 15–33. [Google Scholar] [CrossRef]
- Virtanen, T.; Ek, M. The fragmented nature of tundra landscape. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 4–12. [Google Scholar] [CrossRef]
- Jasotani, N.; Chauhan, D.; Bindra, I. Adopting TensorFlow for Real-World AI: A Practical Approach—TensorFlow v2.2; Jasotani, N.R., Ed.; Independently Published: Novi, MI, USA, 2020. [Google Scholar]
- Huang, L.; Peng, J.; Zhang, R.; Li, G.; Lin, L. Learning deep representations for semantic image parsing: A comprehensive overview. Front. Comput. Sci. 2018, 12, 840–857. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.; Villena-Martinez, V.; Garcia-Rodriguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857v1. [Google Scholar]
- Deng, L.; Yang, M.; Qian, Y.; Wang, C.; Wang, B. CNN based semantic segmentation for urban traffic scenes using fisheye camera. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017. [Google Scholar] [CrossRef]
- Romera, E.; Bergasa, L.M.; Alvarez, J.M.; Trivedi, M. Train Here, Deploy There: Robust Segmentation in Unseen Domains. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017. [Google Scholar] [CrossRef]
- Corbane, C.; Pesaresi, M.; Politis, P.; Syrris, V.; Florczyk, A.J.; Soille, P.; Maffenini, L.; Burger, A.; Vasilev, V.; Rodriguez, D.; et al. Big earth data analytics on Sentinel-1 and Landsat imagery in support to global human settlements mapping. Big Earth Data 2017, 1, 118–144. [Google Scholar] [CrossRef] [Green Version]
- Lisini, G.; Salentinig, A.; Du, P.; Gamba, P. SAR-Based Urban Extents Extraction: From ENVISAT to Sentinel-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2683–2691. [Google Scholar] [CrossRef]
- Fernandez-Moral, E.; Martins, R.; Wolf, D.; Rives, P. A new metric for evaluating semantic segmentation: Leveraging global and contour accuracy. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017; pp. 1051–1056. [Google Scholar]
- Opitz, J.; Burst, S. Macro F1 and Macro F1. arXiv 2019, arXiv:1911.03347. [Google Scholar]
- Strozzi, T.; Antonova, S.; Günther, F.; Mätzler, E.; Vieira, G.; Wegmüller, U.; Westermann, S.; Bartsch, A. Sentinel-1 SAR Interferometry for Surface Deformation Monitoring in Low-Land Permafrost Areas. Remote Sens. 2018, 10, 1360. [Google Scholar] [CrossRef] [Green Version]
- Bartsch, A.; Leibman, M.; Strozzi, T.; Khomutov, A.; Widhalm, B.; Babkina, E.; Mullanurov, D.; Ermokhina, K.; Kroisleitner, C.; Bergstedt, H. Seasonal Progression of Ground Displacement Identified with Satellite Radar Interferometry and the Impact of Unusually Warm Conditions on Permafrost at the Yamal Peninsula in 2016. Remote Sens. 2019, 11, 1865. [Google Scholar] [CrossRef] [Green Version]
- Brunner, D.; Bruzzone, L.; Ferro, A.; Lemoine, G. Analysis of the reliability of the double bounce scattering mechanism for detecting buildings in VHR SAR images. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009. [Google Scholar] [CrossRef]
- Hinkel, K.; Eisner, W.; Kim, C. Detection of tundra trail damage near Barrow, Alaska using remote imagery. Geomorphology 2017, 293, 360–367. [Google Scholar] [CrossRef]
- Esau, I.; Miles, V.V.; Davy, R.; Miles, M.W.; Kurchatova, A. Trends in normalized difference vegetation index (NDVI) associated with urban development in northern West Siberia. Atmos. Chem. Phys. 2016, 16, 9563–9577. [Google Scholar] [CrossRef] [Green Version]
- Miles, V.; Esau, I. Seasonal and Spatial Characteristics of Urban Heat Islands (UHIs) in Northern West Siberian Cities. Remote Sens. 2017, 9, 989. [Google Scholar] [CrossRef] [Green Version]
- Nitze, I.; Grosse, G.; Jones, B.M.; Romanovsky, V.E.; Boike, J. Remote sensing quantifies widespread abundance of permafrost region disturbances across the Arctic and Subarctic. Nat. Commun. 2018, 9, 5423. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Site | Prudhoe Bay | Longyearbyen | Western Greenland |
|---|---|---|---|
| Data source | Raynolds et al. (2014) [3] | Lu et al. (2018) [54] | Ingeman-Nielsen & Vakulenko (2018) [60] |
| Coverage | 3 × 20 km2, 40% non-impacted | 31 objects (0.13 km2), 1 reference area (0.42 km2) | 253 objects for 7 communities (0.35 km2), 7 reference areas (13.2 km2); (subset for HH+HV coverage area) |
| Types | Roads and other disturbed areas (especially gravel pads) | Roads (6) and buildings (25) | Roads (27), buildings (199), and other human impact (27) |
| S-2 granule(s) | 05WPU | 33XWG | 21WXS |
| 21WXU | |||
| 22WDB | |||
| 22WDC | |||
| 22WDD | |||
| 22WDV | |||
| 22WEB | |||
| 22WEC | |||
| 22WEV | |||
| S-1 polarization | VV+VH | VV+VH and HH+HV | HH+HV |
| S-1 dates | 06.01.2018 | 05.01.2019 and 07.01.2019 | 06.01.2019 |
| S-1 orbit | ascending | descending and ascending | ascending |
| Sentinel-2 Granule ID | Acquisition Dates |
|---|---|
| 33XWG | 01.07.2016, 31.07.2017, 21.07.2018 |
| 05WPU | 03.08.2016, 10.07.2017, 24.07.2017 |
| 21WXS | 13.08.2016, 03.08.2017, 13.08.2017 |
| 21WXU | 08.08.2017, 26.08.2017, 06.08.2017 |
| 22WDB | 13.08.2016, 08.08.2017, 15.08.2017 |
| 22WDC | 03.08.2016, 06.08.2016, 06.08.2017 |
| 22WDD | 27.07.2016, 26.08.2016, 02.07.2018 |
| 22WDV | 21.07.2017, 28.07.2017, 31.07.2017 |
| 22WEB | 11.07.2016, 30.08.2016, 15.08.2017 |
| 22WEC | 13.08.2016, 29.07.2017, 19.07.2018 |
| 22WEV | 12.08.2017, 28.07.2017, 13.07.2018 |
| Target Class | Description | GBM | DL |
|---|---|---|---|
| Buildings | houses, industrial buildings including tanks | x | x |
| Roads | gravel as well as asphalt roads (no tundra tracks) | x | x |
| Other human impacted area | gravel pads, air strips, moorings | x | x |
| Tundra | All natural landcover, excluding water | x | |
| Water | Open water | x |
| Type | Method | Input | Training Score | Testing Score | Road | Tundra/ Other | Building | Other Human Impact | Water |
|---|---|---|---|---|---|---|---|---|---|
| VV+VH | GBM | VV | 1.00 | 0.97 | 0.88 | 1.0 | 0.97 | 0.99 | 1.0 |
| GBM | VH | 1.00 | 0.96 | 0.87 | 1.0 | 0.96 | 0.99 | 1.0 | |
| GBM | VV+VH | 1.00 | 0.97 | 0.9 | 1.0 | 0.97 | 0.99 | 1.0 | |
| GBM | VV based on DL samples | 0.61 | 0.60 | 0.47 | 0.89 | 0.42 | 0.63 | n.a. | |
| GBM | Sentinel-2 only | 0.94 | 0.94 | 0.84 | 1.0 | 0.88 | 0.97 | 1.0 | |
| GBM | Sentinel-2 only based on DL samples | 0.60 | 0.59 | 0.43 | 0.89 | 0.39 | 0.64 | n.a. | |
| DL | Sentinel-2 only | 0.83 | - | - | - | - | - | ||
| DL | VV | 0.61 | - | - | - | - | - | ||
| DL | VH | 0.61 | - | - | - | - | - | ||
| DL | VV+VH | 0.81 | - | - | - | - | - | ||
| HH+HV | GBM | HH | 1.00 | 0.92 | 0.88 | 1.0 | 0.76 | 0.97 | 1.0 |
| GBM | HV | 1.00 | 0.90 | 0.86 | 1.0 | 0.69 | 0.98 | 1.0 | |
| GBM | HH+HV | 1.00 | 0.94 | 0.91 | 1.0 | 0.81 | 0.98 | 1.0 | |
| GBM | Sentinel-2 only | 0.99 | 0.88 | 0.84 | 1.0 | 0.6 | 0.97 | 1.0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartsch, A.; Pointner, G.; Ingeman-Nielsen, T.; Lu, W. Towards Circumpolar Mapping of Arctic Settlements and Infrastructure Based on Sentinel-1 and Sentinel-2. Remote Sens. 2020, 12, 2368. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152368
Bartsch A, Pointner G, Ingeman-Nielsen T, Lu W. Towards Circumpolar Mapping of Arctic Settlements and Infrastructure Based on Sentinel-1 and Sentinel-2. Remote Sensing. 2020; 12(15):2368. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152368
Chicago/Turabian StyleBartsch, Annett, Georg Pointner, Thomas Ingeman-Nielsen, and Wenjun Lu. 2020. "Towards Circumpolar Mapping of Arctic Settlements and Infrastructure Based on Sentinel-1 and Sentinel-2" Remote Sensing 12, no. 15: 2368. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12152368