Integrated Geological and Geophysical Mapping of a Carbonatite-Hosting Outcrop in Siilinjärvi, Finland, Using Unmanned Aerial Systems

 , , , ,
, , , , 
Abstract
:
1. Introduction
2. Materials and Methods
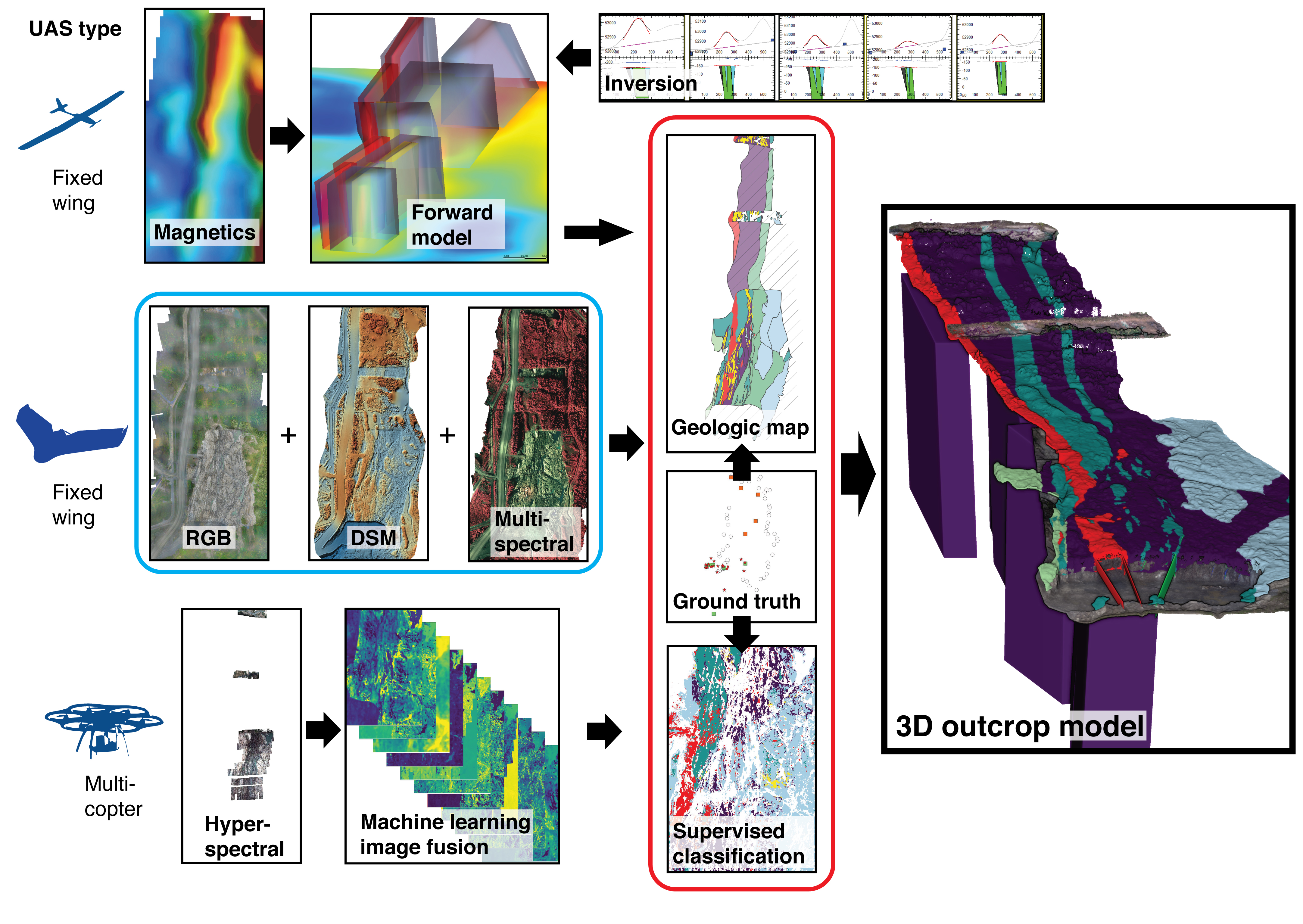
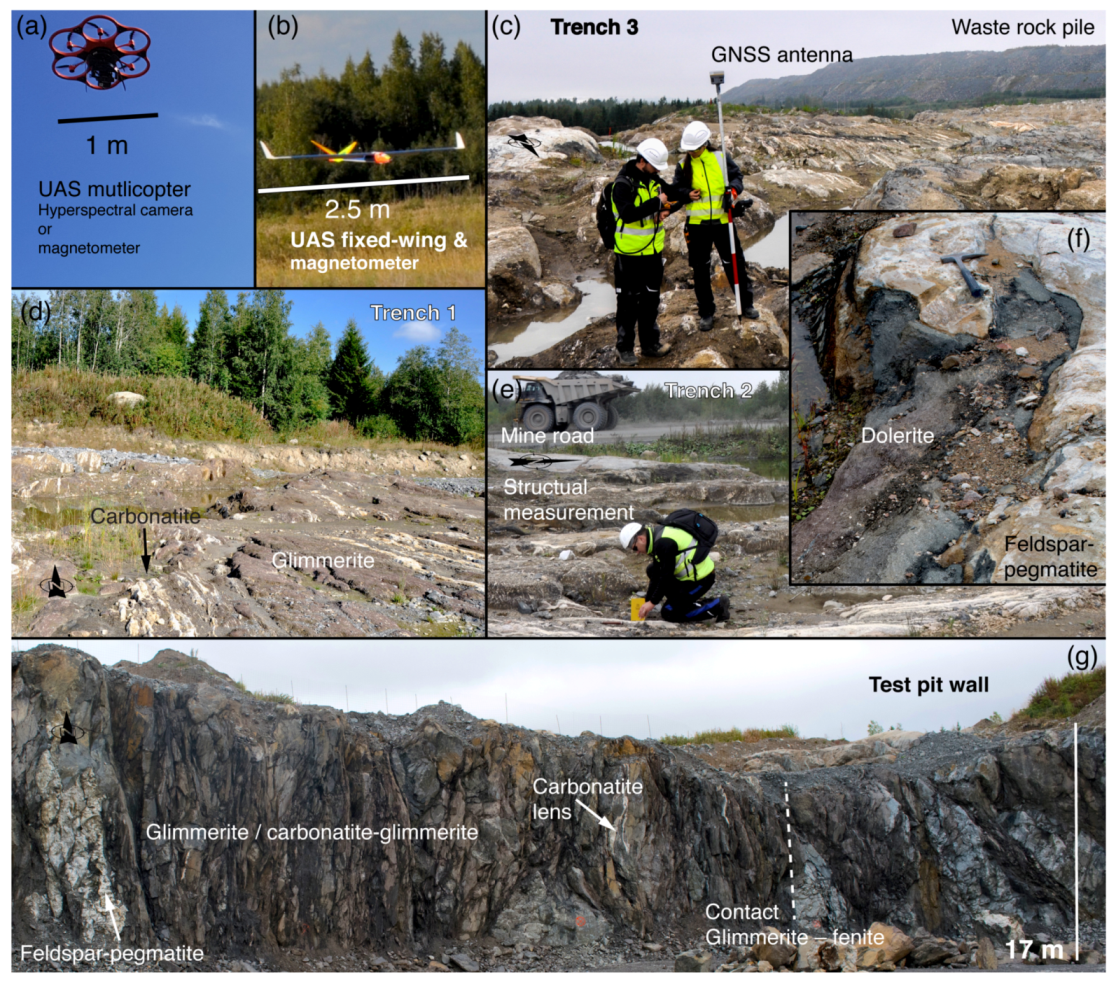
2.1. UAS Data Acquisition Method
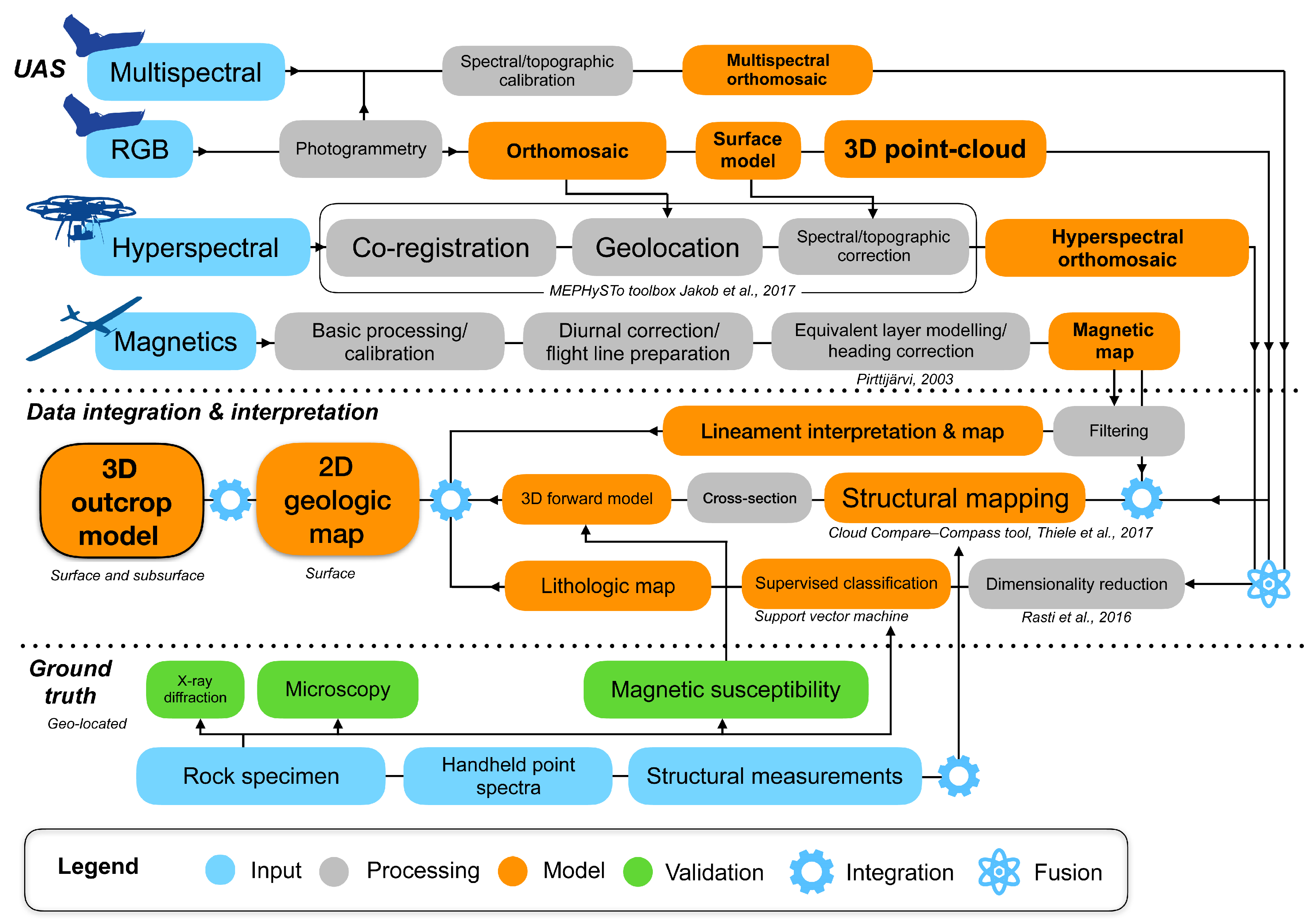
2.2. Data Products: Feature Extraction, Supervised Image Classification and Magnetic Forward Modeling
2.3. The Adapted Workflow Conducted for This Survey
2.4. Ground Truthing and Laboratory Validation
3. Case Study: The Siilinjärvi Carbonatite Complex
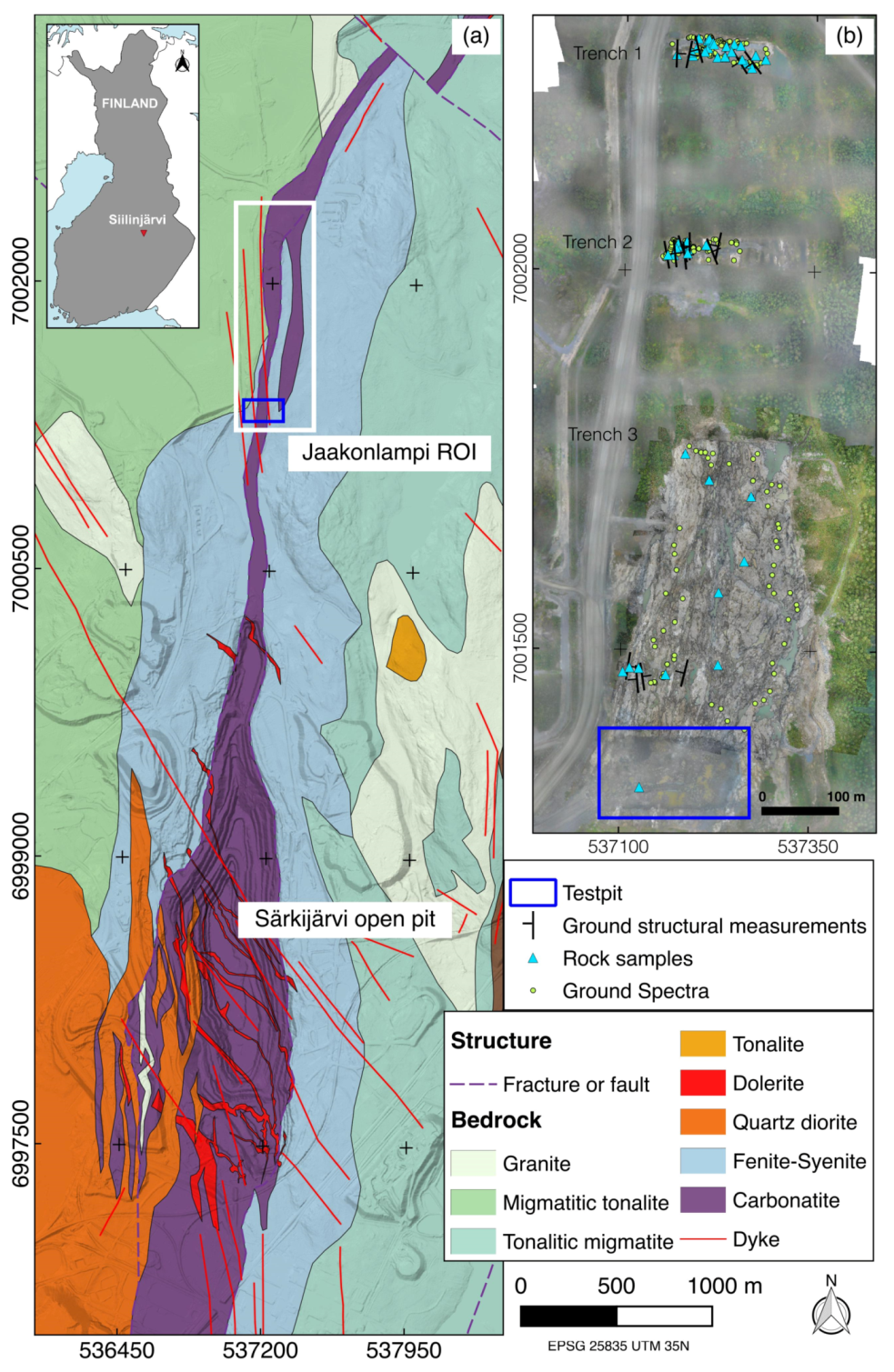
3.1. Local Geology and Study Area
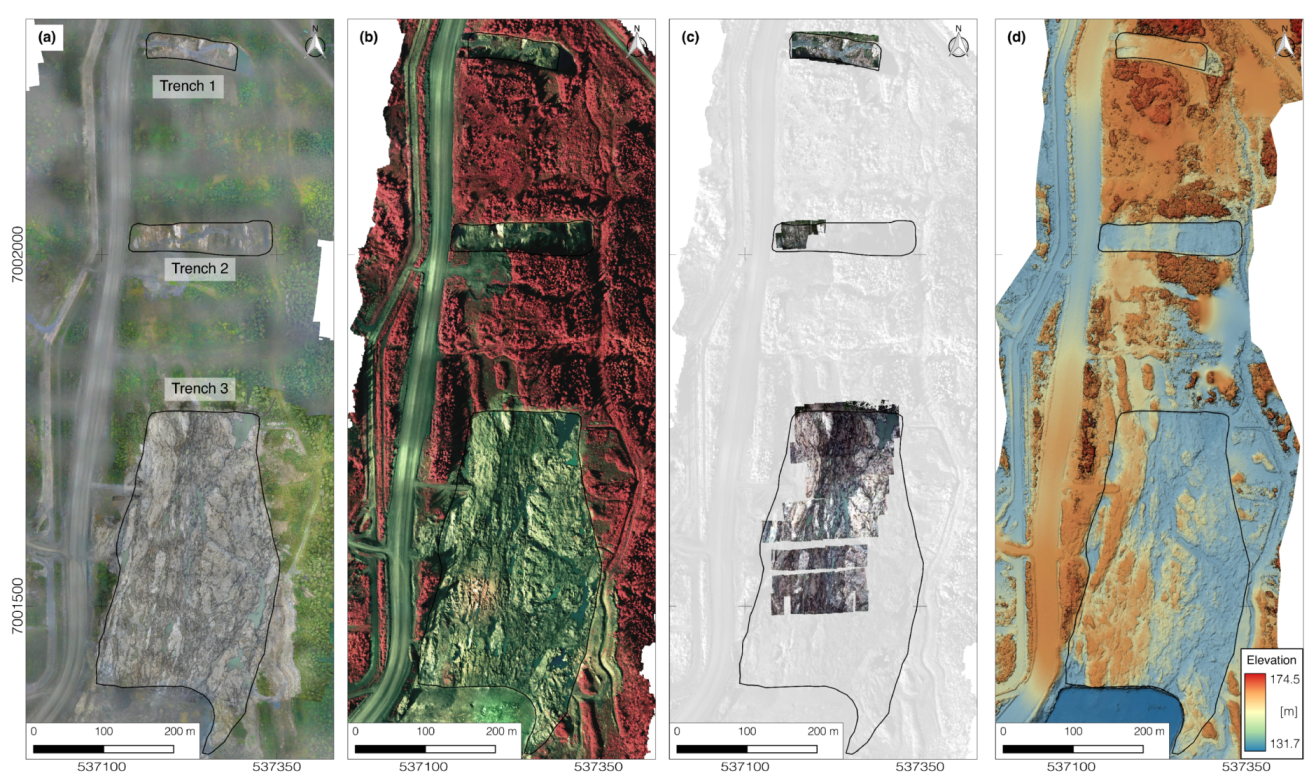
3.2. The Jaakonlampi Test Area
- Carbonatite–glimmerite (CGL) and carbonatite (CRB)
- Dolerite (DL)
- Felspar-rich pegmatite veins (FSP-PEG)
- Fenite (resp. syenitic fenite or fenite-syenite) (FEN-SYN)
- Glimmerite (GL)
- Granite–gneiss (GRGN)
4. Results
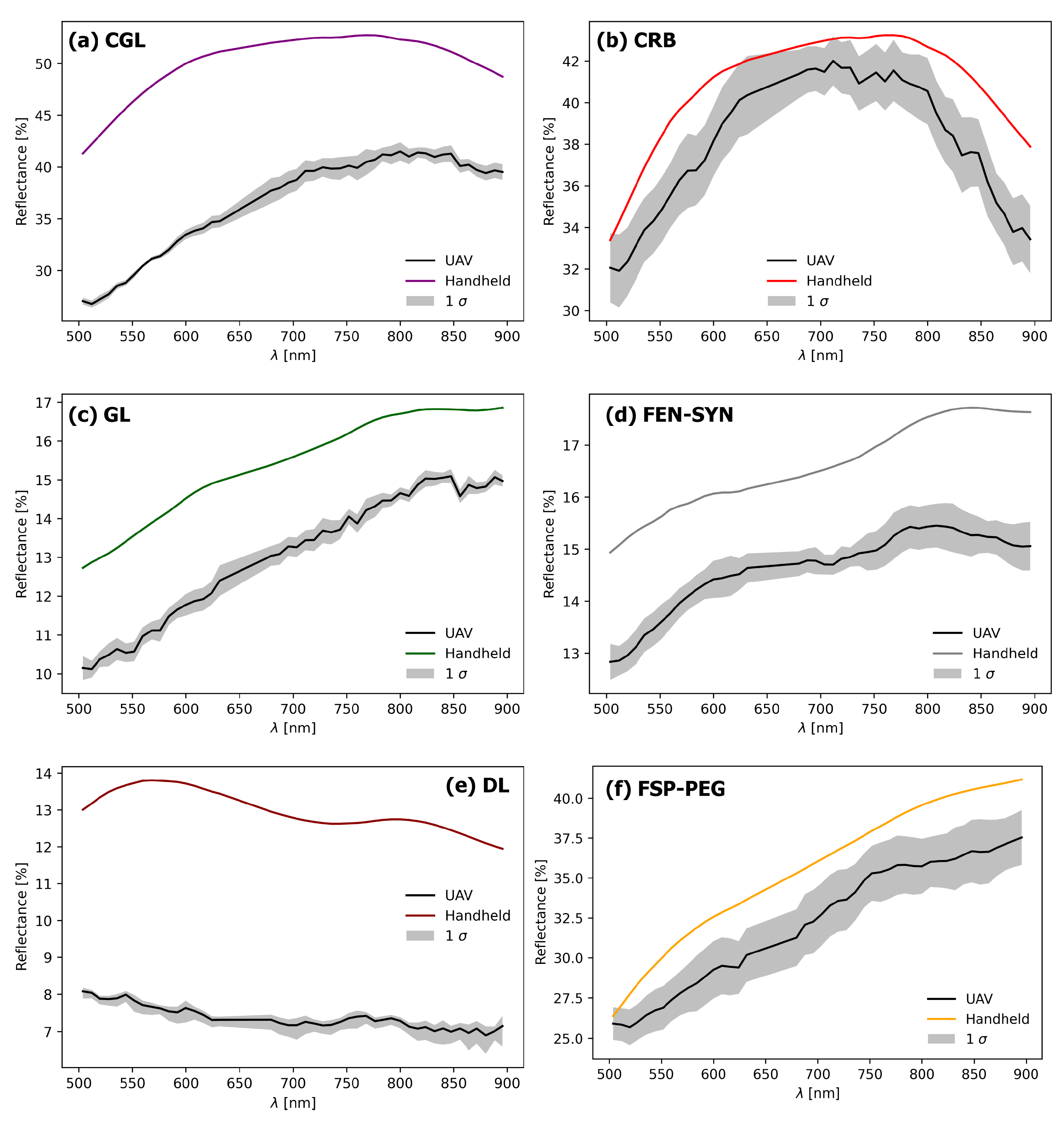
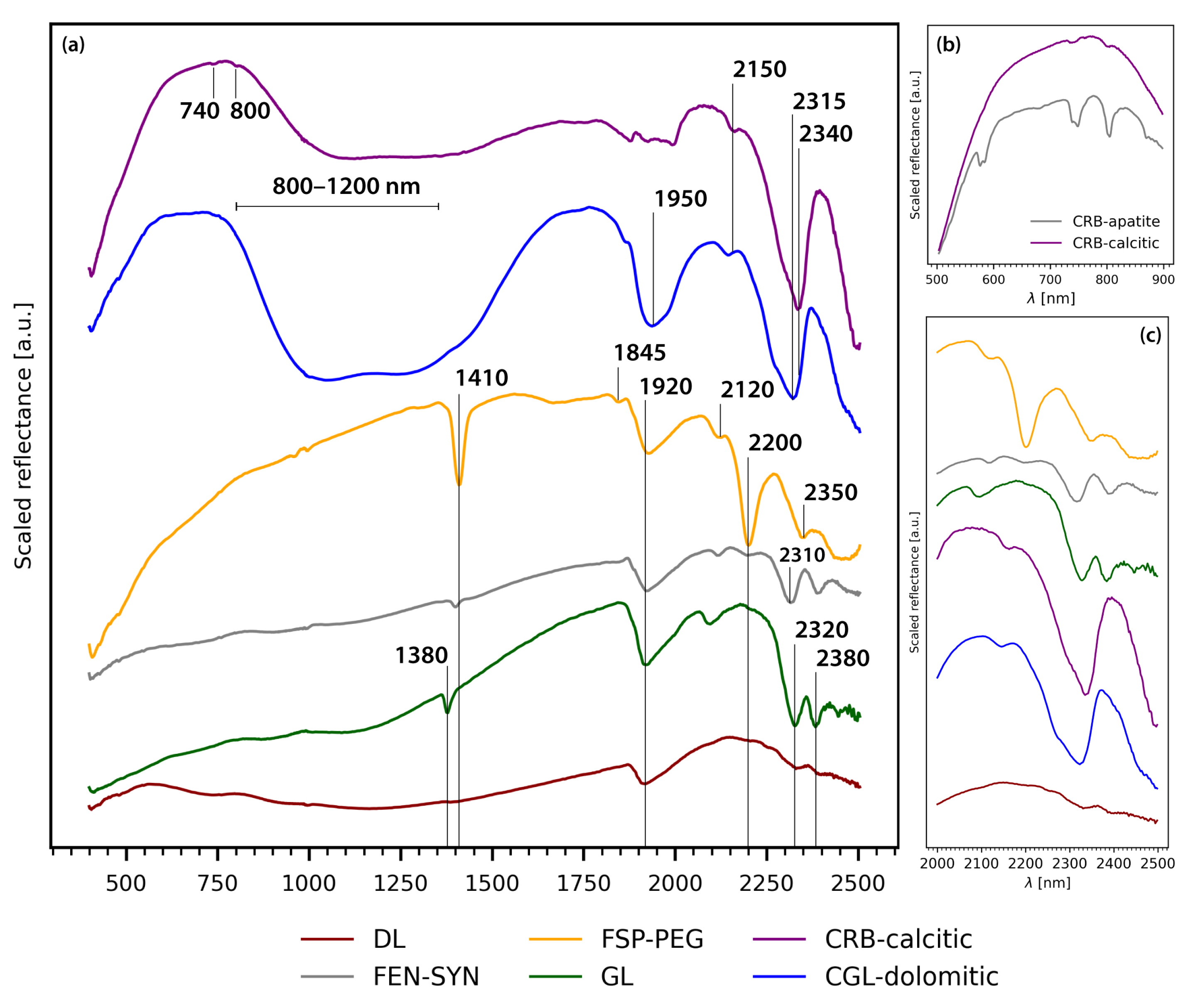
4.1. Ground Spectroscopy and Principal Lithologic Representation
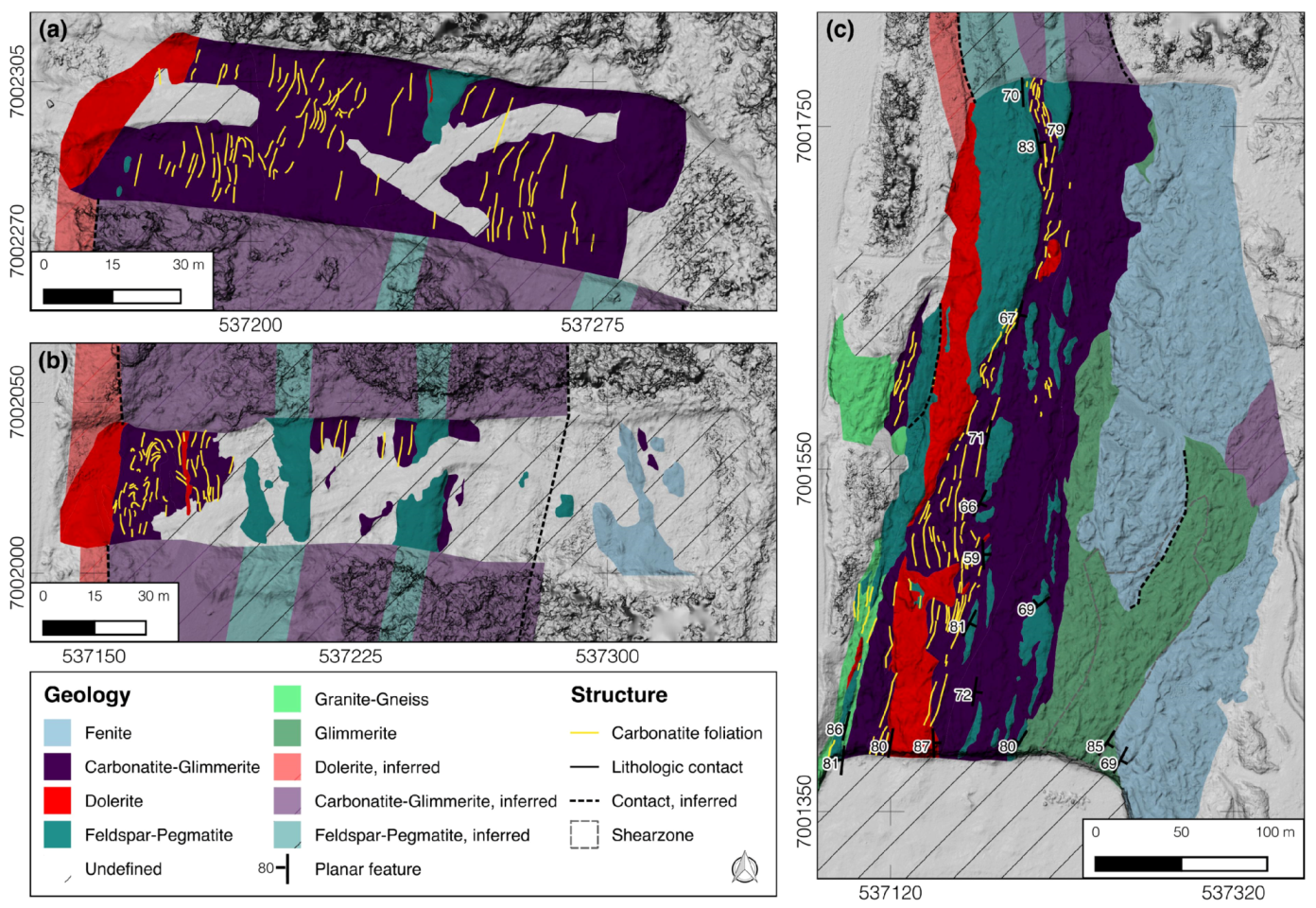
4.2. UAS-Based Optical Remote Sensing Observations
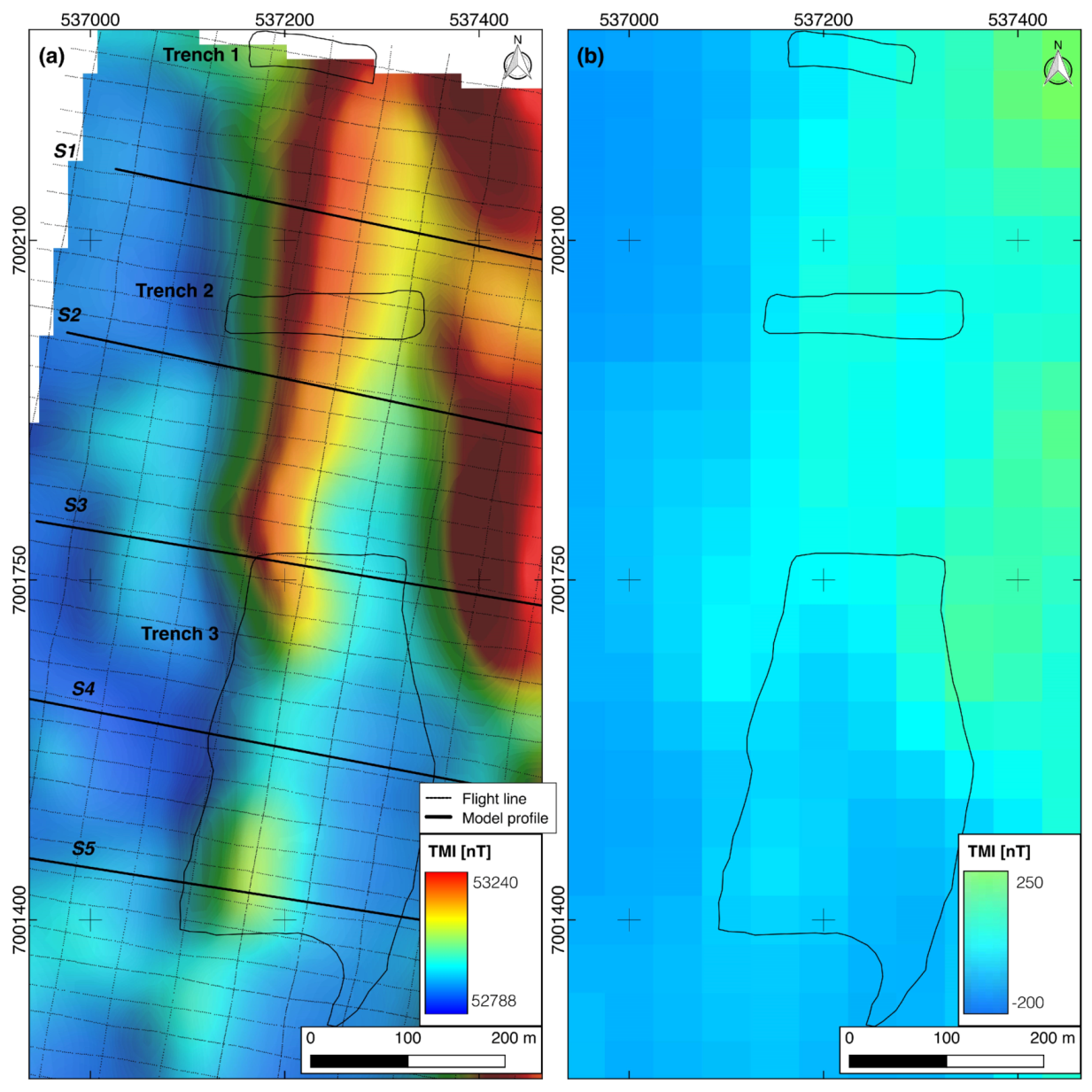
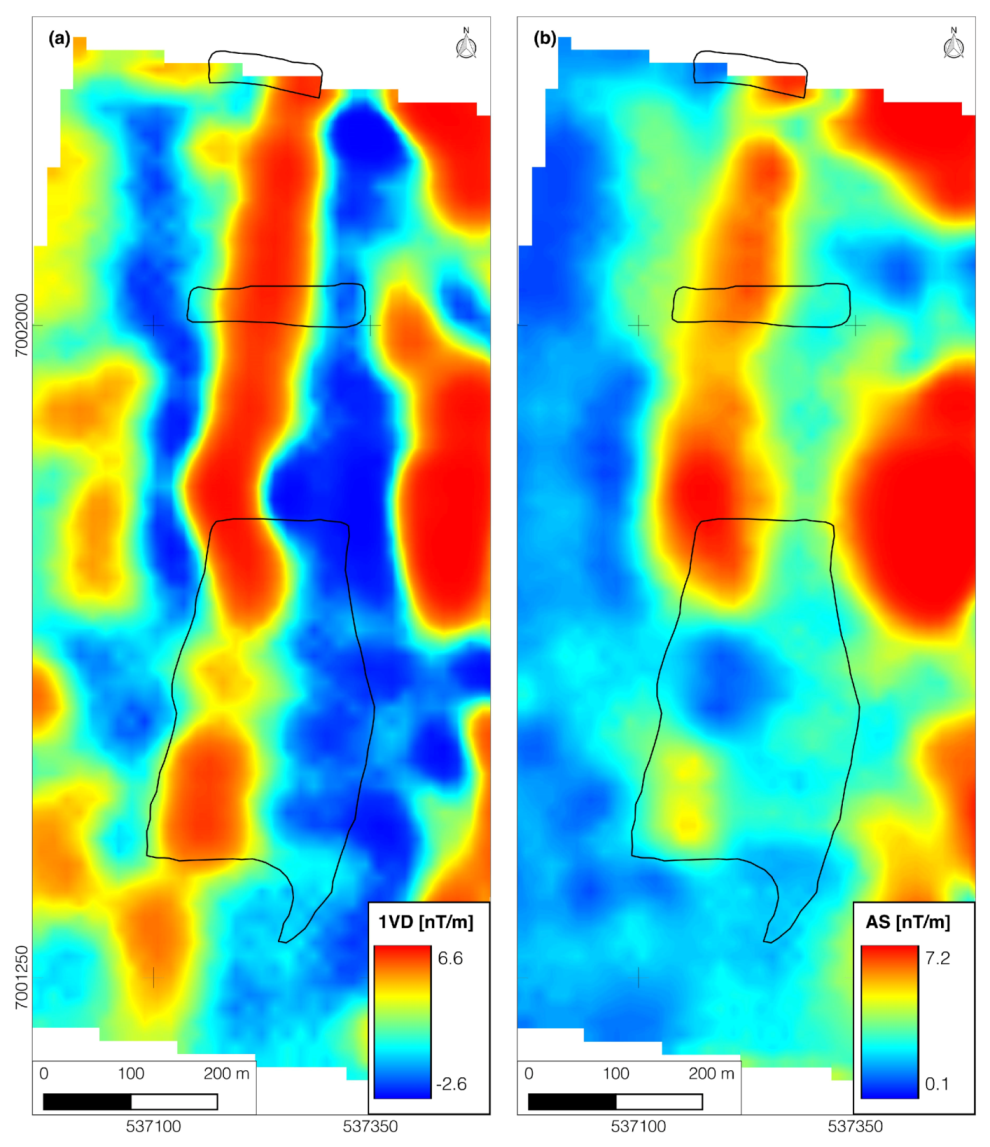
4.3. UAS-Based Magnetic Observations
4.4. Geologic Modeling and Ground Magnetic Susceptibility
5. Data Integration and Validation
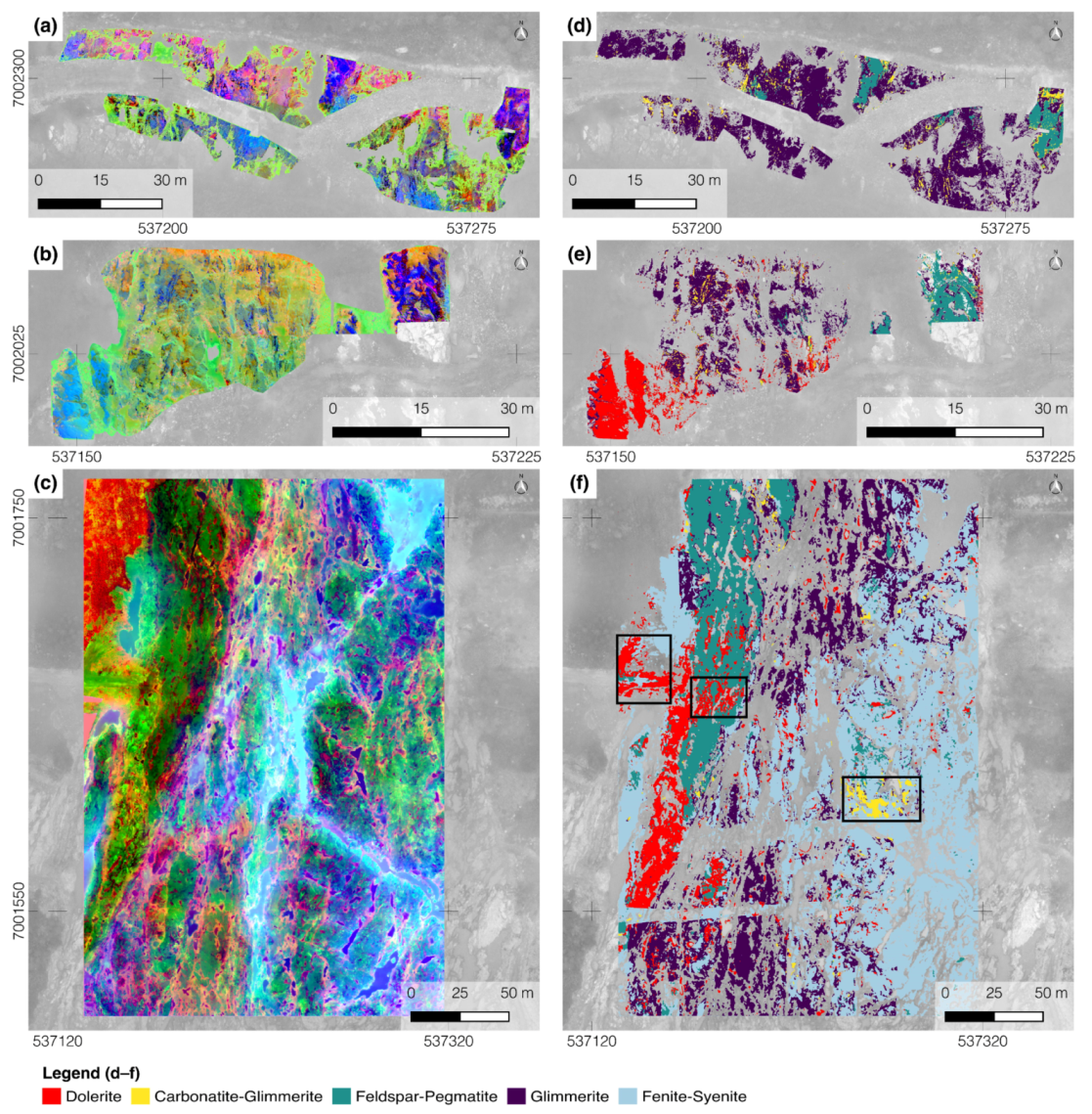
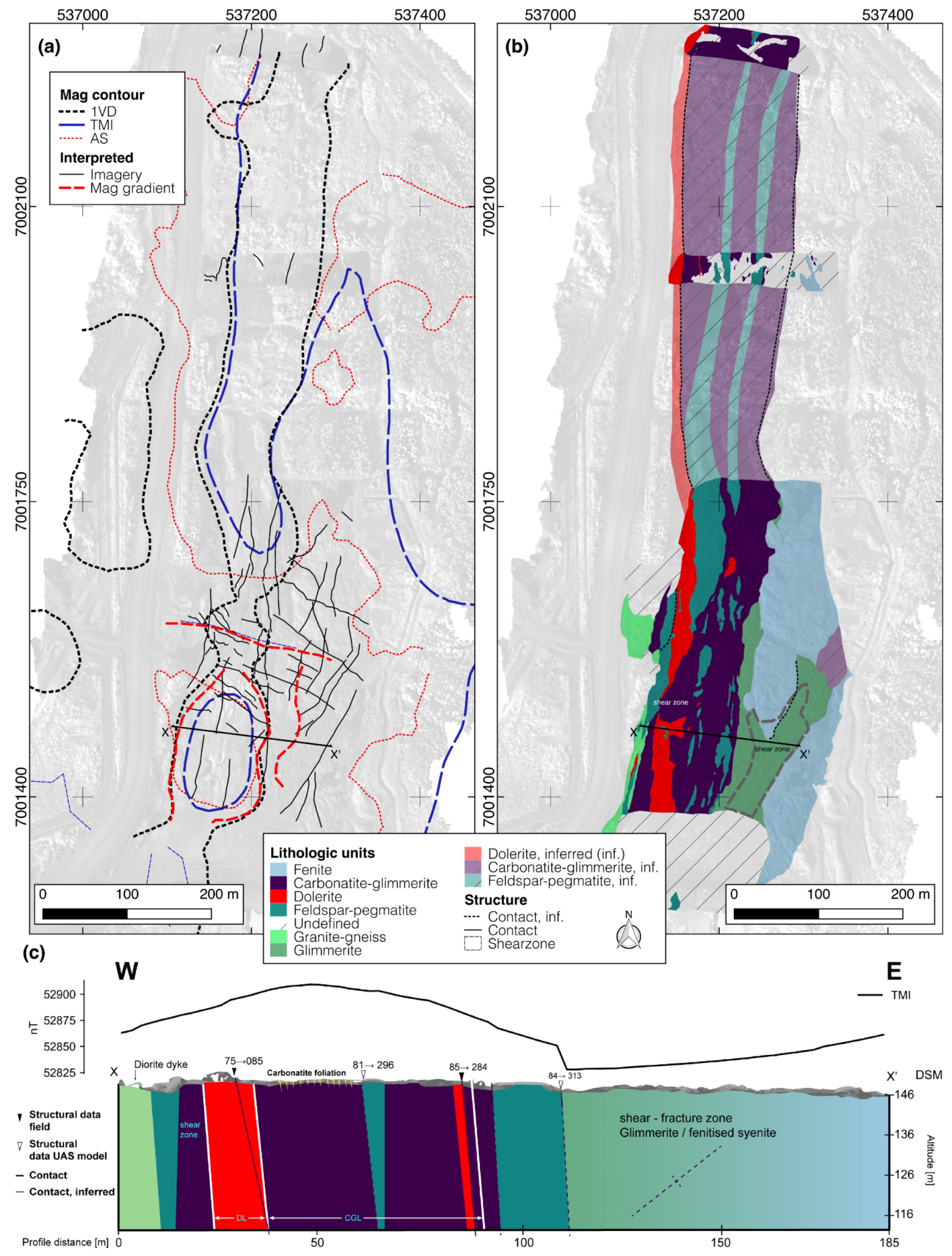
5.1. Geologic Mapping and Interpretation
5.2. Mineralogic Validation and Additional Observation
5.3. Validation of Structural Observations
6. Discussion
6.1. Assessing the General UAS Survey Workflow with Focus on Image Data
- Magnetics: 0.695 km2 (interpolated grid surface from 39-line km);
- MSIs: 0.649 km2;
- RGB: 0.623 km2;
- HSIs: 0.047 km2 (sum of HSI flights).
6.2. Further Implications of UAS Magnetic Surveys and Added Understanding of the Local Geology
7. Conclusions
- Rapid, flexible and automatized UAS-based surveying of lithologic surface and subsurface features, using light-weight multi-sensor technology, resulted in a 3D outcrop interpretation and provided material and structural information as a valuable alternative to time-consuming ground surveying.
- Forward modeling of UAS-based magnetic data provided insight on orientation and depth of lithologies concealed from surface observation, here, UASs provided a link between 2D and 3D mapping.
- Challenges arose in the integration of high-resolution HSI data at smaller scales and missing overlap between outcrops, together with spectrally inert rock types at the given spectral range.
- Integration and fusion of topographic and spectral data using supervised surface classification of spectrally non-distinct targets with a support vector machine on dimensionality-reduced feature extraction data was successful in overcoming the challenges.
- We recommend the use and combination of fixed-wing UASs for target-based surveying in the RGB, multispectral, and magnetic domains for advanced geologic mapping and interpretation, while using multicopter-borne HSI data for potential non-distinct lithology discrimination, sub-decimeter feature mapping and to identify features of narrow spectral range.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outcrop/Method | Coordinates | Dimension x-y | Survey Condition | Used Bands/Integration Time | Flights/Coverage | GSD | Altitude | OTVCA Layers |
|---|---|---|---|---|---|---|---|---|
| Method(Hyperspectral only) | ||||||||
| Trench 1 | 63.147N, 27.738E | 130 × 36 m | sunny, windless | 50/10 ms | 1/5500 m2 | 2.7 cm | 40 m | HSI |
| Trench 2 | 63.145N, 27.738E | 200 × 40 m | sunny, windless | 50/10 ms | 1/3050 m2 | 2.3 cm | 30 m | HSI |
| Trench 3 | 63.141N, 27.738E | 220 × 400 m | low clouds, breeze | 50/30 ms | 3/38,200 m2 | 3.4 cm | 50 m | HSI, MSI, RGB |
| Multi-spectral | 63.143N, 27.738E | 450 × 1430 m | sunny, windless | 4/automatic | 1/0.649 km2 | 10.5 cm | 100 m | – |
| RGB | 63.143N, 27.738E | 540 × 1290 m | low clouds, breeze | 3/automatic | 2/0.623 km2 | 2.7 (1.5) cm | 100 m/70 m | – |
| Magnetic | 63.143N, 27.738E | 620 × 1100 m | sunny, windless | – | 1/0.695 km2 | 30 m * | 40 m | – |
| Sensor | Senop Rikola | Parrot Sequoia | senseFly S.O.D.A. |
|---|---|---|---|
| Dynamic range | 12 bits | 10 bits | – |
| Horizontal field of view | 36.5° | 70.6° | 90° |
| Vertical field of view | 23.5° | 52.6° | 60° |
| Focal length | 9 mm | 4 mm | 2.8–11 |
| Mass | 720 g | 135 g (with sunshine sensor) | 111 g |
| Frame rate | 30 Hz | 1 Hz | 0.3 Hz |
| Spectral resolution | 8 nm | 40 nm (10 nm) | – |

| Truth | Carbonatite | Glimmerite | Feldspar–Pegmatite | Water | Indef. | Soil | |
|---|---|---|---|---|---|---|---|
| Predicted | |||||||
| Carbonatite | 123 | 0 | 17 | 0 | 0 | 7 | |
| Glimmerite | 0 | 120 | 0 | 0 | 0 | 0 | |
| Feldspar–Pegmatite | 4 | 0 | 172 | 0 | 0 | 0 | |
| Water | 0 | 0 | 0 | 63 | 0 | 0 | |
| Indef./Nan | 0 | 0 | 0 | 0 | 42 | 0 | |
| Soil | 0 | 0 | 2 | 0 | 0 | 87 | |
| Truth | Dolerite | Carbonatite | Glimmerite | Feldspar–Pegmatite | Soil | Indef./Nan | Water | |
|---|---|---|---|---|---|---|---|---|
| Predicted | ||||||||
| Dolerite | 83 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Carbonatite | 0 | 147 | 0 | 6 | 0 | 0 | 0 | |
| Glimmerite | 0 | 4 | 80 | 0 | 0 | 0 | 0 | |
| Feldspar–Pegmatite | 0 | 8 | 0 | 124 | 0 | 0 | 0 | |
| Soil | 0 | 0 | 1 | 0 | 50 | 0 | 0 | |
| Indef./Nan | 0 | 0 | 0 | 0 | 0 | 32 | 0 | |
| Water | 0 | 0 | 0 | 0 | 48 | 0 | 90 | |
| Truth | Dolerite | Glimmerite–Carbonatite | Feldspar–Pegmatite | Glimmerite | Fenite–Syenite | Water | Soil | Indef./Nan | |
|---|---|---|---|---|---|---|---|---|---|
| Predicted | |||||||||
| Dolerite | 649 | 0 | 0 | 15 | 0 | 0 | 0 | 0 | |
| Glimmerite–Carbonatite | 0 | 34 | 11 | 0 | 0 | 0 | 0 | 0 | |
| Feldspar–Pegmatite | 31 | 0 | 1141 | 0 | 80 | 0 | 0 | 0 | |
| Glimmerite | 8 | 0 | 13 | 650 | 0 | 0 | 2 | 0 | |
| Fenite–Syenite | 17 | 6 | 39 | 0 | 1296 | 0 | 0 | 0 | |
| Water | 0 | 0 | 0 | 0 | 0 | 532 | 0 | 0 | |
| Soil | 2 | 0 | 0 | 0 | 2 | 0 | 353 | 0 | |
| Indef./Nan | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | |
Appendix B

Appendix C

Appendix D


| Mineral (wt.%) | Carbonatite (and Glimmerite) | Dolerite |
|---|---|---|
| Coordinates: UTM zone 35N | 537156E, 7002020N | 537124E, 7001475E |
| Calcite | 59.6 | 16.6 |
| Magnetite | 1.8 | 2.4 |
| Pyrite | – | 2.0 |
| Actinolite | 3.7 | – |
| Ankerite | 4.1 | – |
| Albite | – | 37.4 |
| Annite | 9.8 | – |
| Apatite | 21.0 | – |
| Biotite | – | 29.7 |
| K-Feldspar | – | 4.8 |
| Quartz | – | 7.2 |
References
- Kim, J.; Kim, S.; Ju, C.; Son, H. Il Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-Based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Dering, G.M.; Micklethwaite, S.; Thiele, S.T.; Vollgger, S.A.; Cruden, A.R. Review of drones, photogrammetry and emerging sensor technology for the study of dykes: Best practises and future potential. J. Volcanol. Geotherm. Res. 2019, 373, 148–166. [Google Scholar] [CrossRef]
- Fairley, I.; Mendzil, A.; Togneri, M.; Reeve, D.E. The use of unmanned aerial systems to map intertidal sediment. Remote Sens. 2018, 10, 1918. [Google Scholar] [CrossRef] [Green Version]
- Jackisch, R.; Lorenz, S.; Zimmermann, R.; Möckel, R.; Gloaguen, R. Drone-Borne Hyperspectral Monitoring of Acid Mine Drainage: An Example from the Sokolov Lignite. Hyperspectral Monitoring of Acid Mine Drainage: An Example from the Sokolov Lignite District. Remote Sens. 2018, 10, 385. [Google Scholar] [CrossRef] [Green Version]
- Padró, J.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Science of the Total Environment Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci. Total Environ. 2019, 657, 1602–1614. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. Reviews of unmanned aerial vehicle (drone) technology trends and its applications in the mining industry. Geosystem Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Booysen, R.; Zimmermann, R.; Lorenz, S.; Gloaguen, R.; Nex, P.A.M.; Andreani, L.; Möckel, R. Towards multiscale and multisource remote sensing mineral exploration using RPAS: A case study in the Lofdal Carbonatite-Hosted REE Deposit, Namibia. Remote Sens. 2019, 11, 2500. [Google Scholar] [CrossRef] [Green Version]
- Parshin, A.; Grebenkin, N.; Morozov, V.; Shikalenko, F. Research Note: First results of a low-altitude unmanned aircraft system gamma survey by comparison with the terrestrial and aerial gamma survey data. Geophys. Prospect. 2018, 66, 1433–1438. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Leading Edge. 2017, 7, 552–557. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic Surveying with a Rotary-Wing Unmanned Aircraft System: A Case Study from a Zinc Deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2018, 175, 3145–3158. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2018, 6, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Sayab, M.; Aerden, D.; Paananen, M.; Saarela, P. Virtual structural analysis of Jokisivu open pit using “structure-from-motion” Unmanned Aerial Vehicles (UAV) photogrammetry: Implications for structurally-controlled gold deposits in Southwest Finland. Remote Sens. 2018, 10, 1296. [Google Scholar] [CrossRef] [Green Version]
- Haldar, S. Mineral Exploration Principles and Applications, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 978-0-12-814022-2. [Google Scholar]
- Marjoribanks, R. Geological Methods in Mineral Exploration and Mining; Springer Science & Business Media: Berlin, Germany, 2010; ISBN 9783540743705. [Google Scholar]
- Abedi, M.; Norouzi, G.H. Integration of various geophysical data with geological and geochemical data to determine additional drilling for copper exploration. J. Appl. Geophys. 2012, 83, 35–45. [Google Scholar] [CrossRef]
- Slavinski, H.; Morris, B.; Ugalde, H.; Spicer, B.; Skulski, T.; Rogers, N. Integration of lithological, geophysical, and remote sensing information: A basis for remote predictive geological mapping of the Baie Verte Peninsula, Newfoundland. Can. J. Remote Sens. 2010, 2, 99–118. [Google Scholar] [CrossRef]
- Beyer, F.; Jurasinski, G.; Couwenberg, J.; Grenzdörffer, G. Multisensor data to derive peatland vegetation communities using a fixed-wing unmanned aerial vehicle. Int. J. Remote Sens. 2019, 40, 9103–9125. [Google Scholar] [CrossRef]
- Heincke, B.; Jackisch, R.; Saartenoja, A.; Salmirinne, H.; Rapp, S.; Zimmermann, R.; Pirttijärvi, M.; Vest Sörensen, E.; Gloaguen, R.; Ek, L.; et al. Developing multi-sensor drones for geological mapping and mineral exploration: Setup and first results from the MULSEDRO project. Geol. Surv. Denmark Greenl. Bull. 2019, 43, 2–6. [Google Scholar] [CrossRef] [Green Version]
- Van der Meer, F.D.; van der Werff, H.M.A.; van Ruitenbeek, F.J.A. Multi- and hyperspectral geologic remote sensing: A review. Int. J. Appl. Earth Obs. Geoinf. 2012, 14, 112–128. [Google Scholar] [CrossRef]
- Jackisch, R.; Madriz, Y.; Zimmermann, R.; Pirttijärvi, M.; Saartenoja, A.; Heincke, B.H.; Salmirinne, H.; Kujasalo, J.-P.; Andreani, L.; Gloaguen, R. Drone-borne hyperspectral and magnetic data integration: Otanmäki Fe-Ti-V deposit in Finland. Remote Sens. 2019, 11, 2084. [Google Scholar] [CrossRef] [Green Version]
- Puustinen, K. Geology of the Siilinjärvi Carbonatite Complex, Eastern Finland. Bull. la Commision Geol. Finlande 1971, 249, 1–43. [Google Scholar]
- Luoma, S.; Majaniemi, J.; Kaipainen, T.; Pasanen, A. GPR survey and field work summary in Siilinjärvi mine during July 2014. Geol. Surv. Finland. Arch. Rep. 2016, 39, 1–39. [Google Scholar]
- Malehmir, A.; Heinonen, S.; Dehghannejad, M.; Heino, P.; Maries, G.; Karell, F.; Suikkanen, M.; Salo, A. Landstreamer seismics and physical property measurements in the siilinjärvi open-pit apatite (phosphate) mine, central Finland. Geophysics 2017, 82, B29–B48. [Google Scholar] [CrossRef]
- Laakso, V. Testing of Reflection Seismic, GPR and Magnetic Methods for Mineral Exploration and Mine Planning at the Siilinjärvi Phosphate Mine Site in Finland. Master’s Thesis, University of Helsinki, Helsinki, Finland, 2019. [Google Scholar]
- Da Col, F.; Papadopoulou, M.; Koivisto, E.; Sito, Ł.; Savolainen, M.; Socco, L.V. Application of surface-wave tomography to mineral exploration: A case study from Siilinjärvi, Finland. Geophys. Prospect. 2020, 68, 254–269. [Google Scholar] [CrossRef] [Green Version]
- Pajunen, M.; Salo, A.; Suikkanen, M.; Ullgren, A.-K.; Oy, Y.S. Brittle structures in the south-western corner of the Särkijärvi open pit, Siilinjärvi carbonatite occurrence. Geol. Surv. Finland. Arch. Rep. 2017, 38, 1–38. [Google Scholar]
- Mattsson, H.B.; Högdahl, K.; Carlsson, M.; Malehmir, A. The role of mafic dykes in the petrogenesis of the Archean Siilinjärvi carbonatite complex, east-central Finland. Lithos 2019, 342–343, 468–479. [Google Scholar] [CrossRef]
- Tuomas, K.; Pietari, S.; Emilia, K.; Savolainen, M. 3D modelling of the dolerite dyke network within the Siilinjärvi phosphate deposit. In Proceedings of the Visual3D Conference—Visualization of 3D/4D Models in Geosciences, Exploration and Mining, Luleå, Sweden, 1–2 October 2019; p. 33. [Google Scholar]
- Tichomirowa, M.; Grosche, G.; Götze, J.; Belyatsky, B.V.; Savva, E.V.; Keller, J.; Todt, W. The mineral isotope composition of two Precambrian carbonatite complexes from the Kola Alkaline Province—Alteration versus primary magmatic signatures. Lithos 2006, 91, 229–249. [Google Scholar] [CrossRef]
- Carlsson, M.; Eklund, O.; Fröjdö, S.; Savolainen, M. Petrographic and geochemical characterization of fenites in the northern part of the Siilinjärvi carbonatite-glimmerite complex, Central Finland. In Proceedings of the Geological Society of Finland, Abstracts of the 5th Finnish National Colloquium of Geosciences, Helsinki, Finland, 6–7 March 2019; p. 29. [Google Scholar]
- Thiele, S.T.; Grose, L.; Samsu, A.; Micklethwaite, S.; Vollgger, S.A.; Cruden, A.R. Rapid, semi-automatic fracture and contact mapping for point clouds, images and geophysical data. Solid Earth 2017, 8, 1241–1253. [Google Scholar] [CrossRef] [Green Version]
- Nabighian, M.N. The Analytic Signal Of Two-Dimensional Magnetic Bodies With Polygonal Cross-Section: Its Properties And Use For Automated Anomaly Interpretation. Geophysics 1972, 37, 507–517. [Google Scholar] [CrossRef]
- Hinze, W.J.; von Frese, R.R.B.; Saad, A.H. Gravity and Magnetic Exploration; Cambridge University Press: Cambridge, UK, 2013; ISBN 9780511843129. [Google Scholar]
- Vacquier, V.; Steenland, N.C.; Henderson, R.G.; Zietz, I. Interpretation of Aeromagnetic Maps; Geological Society of America: Boulder, CO, USA, 1951; ISBN 9780813710471. [Google Scholar]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Lorenz, S.; Seidel, P.; Ghamisi, P.; Zimmermann, R.; Tusa, L.; Khodadadzadeh, M.; Contreras, I.C.; Gloaguen, R. Multi-sensor spectral imaging of geological samples: A data fusion approach using spatio-spectral feature extraction. Sensors 2019, 19, 2787. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rasti, B.; Ulfarsson, M.O.; Sveinsson, J.R. Hyperspectral Feature Extraction Using Total Variation Component Analysis. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6976–6985. [Google Scholar] [CrossRef]
- Ghamisi, P.; Yokoya, N.; Li, J.; Liao, W.; Liu, S.; Plaza, J.; Rasti, B.; Plaza, A. Advances in Hyperspectral Image and Signal Processing: A Comprehensive Overview of the State of the Art. IEEE Geosci. Remote Sens. Mag. 2017, 5, 37–78. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]
- Almqvist, B.; Högdah, K.; Karell, F.; Malehmir, A. Anisotropy of magnetic susceptibility (AMS) in the Siilinjärvi carbonatite complex, eastern Finland. In Proceedings of the Geophysical Research Abstracts, EGU General Assembly, Vienna, Austria, 23–28 April 2017; p. 9887. [Google Scholar]
- James, M.R.; Robson, S.; D’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2016, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the use of structure-from-motion photogrammetry in geomorphic research. Earth Surf. Process. Landforms 2019, 2084, 2081–2084. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo-A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef] [Green Version]
- Karpouzli, E.; Malthus, T. The empirical line method for the atmospheric correction of IKONOS imagery. Int. J. Remote Sens. 2003, 5, 1143–1150. [Google Scholar] [CrossRef]
- Gavazzi, B.; Le Maire, P.; Mercier de Lépinay, J.; Calou, P.; Munschy, M. Fluxgate three-component magnetometers for cost-effective ground, UAV and airborne magnetic surveys for industrial and academic geoscience applications and comparison with current industrial standards through case studies. Geomech. Energy Environ. 2019, 20, 100117. [Google Scholar] [CrossRef]
- Pirttijärvi, M. Numerical Modeling and Inversion of Geophysical Electromagnetic Measurements Using a Thin Plate Model. Ph.D. Dissertation, University of Oulu, Oulu, Finland, 2003. [Google Scholar]
- Austin, J.R.; Schmidt, P.W.; Foss, C.A. Magnetic modeling of iron oxide copper-gold mineralization constrained by 3D multiscale integration of petrophysical and geochemical data: Cloncurry District, Australia. Interpretation 2013, 1, T63–T84. [Google Scholar] [CrossRef]
- Tichomirowa, M.; Whitehouse, M.J.; Gerdes, A.; Götze, J.; Schulz, B.; Belyatsky, B.V. Different zircon recrystallization types in carbonatites caused by magma mixing: Evidence from U-Pb dating, trace element and isotope composition (Hf and O) of zircons from two Precambrian carbonatites from Fennoscandia. Chem. Geol. 2013, 353, 173–198. [Google Scholar] [CrossRef]
- Poutiainen, M. Fluids in the Siilinjarvi carbonatite complex, eastern Finland: Fluid inclusion evidence for the formation conditions of zircon and apatite. Bull. Geol. Soc. Finl. 1995, 67, 3–18. [Google Scholar] [CrossRef]
- O’Brien, H.; Heilimo, E.; Heino, P. The Archean Siilinjärvi Carbonatite Complex. Miner. Depos. Finl. 2015, 1, 327–343. [Google Scholar]
- Salo, A. Geology of the Jaakonlampi Area in the Siilinjärvi Carbonatite Complex. Bachelor’s Thesis, University of Oulu, Oulu, Finland, 2016. [Google Scholar]
- Gaffey, S.J. Reflectance spectroscopy in the visible and near- infrared (0.35–2.55 micrometers): Applications in carbonate petrology. Geology 1985, 4, 270–273. [Google Scholar] [CrossRef]
- Neave, D.A.; Black, M.; Riley, T.R.; Gibson, S.A.; Ferrier, G.; Wall, F.; Broom-Fendley, S. On the feasibility of imaging carbonatite-hosted rare earth element deposits using remote sensing. Econ. Geol. 2016, 111, 641–665. [Google Scholar] [CrossRef] [Green Version]
- Hunt, G.R. Spectral signatures of particulate minerals in the visible and near infrared. Geophysics 1977, 42, 501–513. [Google Scholar] [CrossRef] [Green Version]
- Clark, R.N. Spectroscopy of rocks and minerals, and principles of spectroscopy. Man. Remote Sens. 1999, 3, 2. [Google Scholar]
- Hunt, G.R.; Ashley, R.P. Spectra of altered rocks in the visible and near infrared. Econ. Geol. 1979, 74, 1613–1629. [Google Scholar] [CrossRef]
- Airo, M.-L. Aerogeophysics in Finland 1972–2004: Methods, System Characteristics and Applications. Spec. Pap. Geol. Surv. Finl. 2005, 39, 197. [Google Scholar]
- Burkin, J.N.; Lindsay, M.D.; Occhipinti, S.A.; Holden, E.J. Incorporating conceptual and interpretation uncertainty to mineral prospectivity modelling. Geosci. Front. 2019, 10, 1383–1396. [Google Scholar] [CrossRef]
- Cardozo, N.; Allmendinger, R.W. Spherical projections with OSXStereonet. Comput. Geosci. 2013, 51, 193–205. [Google Scholar] [CrossRef]
- Jackisch, R. Drone-based surveys of mineral deposits. Nat. Rev. Earth Environ. 2020, 1, 187. [Google Scholar] [CrossRef]
- Rowan, L.C.; Kingston, M.J.; Crowley, J.K. Spectral reflectance of carbonatites and related alkalic igneous rocks: Selected samples from four North American localities. Econ. Geol. 1986, 81, 857–871. [Google Scholar] [CrossRef]
- Rowan, L.C.; Mars, J.C. Lithologic mapping in the Mountain Pass, California area using Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) data. Remote Sens. Environ. 2003, 84, 350–366. [Google Scholar] [CrossRef]
- Kirsch, M.; Lorenz, S.; Zimmermann, R.; Andreani, L.; Tusa, L.; Pospiech, S.; Jackisch, R.; Khodadadzadeh, M.; Ghamisi, P.; Unger, G.; et al. Hyperspectral outcrop models for palaeoseismic studies. Photogramm. Rec. 2019, 34, 385–407. [Google Scholar] [CrossRef] [Green Version]
- Valencia, J.; Battulwar, R.; Naghadehi, M.Z.; Sattarvand, J. Enhancement of explosive energy distribution using uavs and machine learning. In Proceedings of the Mining Goes Digital 39th International Symposium on Application of Computers and Operations Research in the Mineral Industry, Leiden, The Netherlands, 4–6 June 2019. [Google Scholar]
- Heilimo, E.; Brien, H.O.; Heino, P. Constraints on the Formation of the Archean Siilinjärvi Carbonatite-Glimmerite Complex, Fennoscandian Shield. 2015. Available online: https://bit.ly/339EGyI (accessed on 2 June 2020).
- Le Bas, M.J. Nephelinites and carbonatites. Geol. Soc. Spec. Publ. 1987, 30, 53–83. [Google Scholar] [CrossRef]
- Borradaile, G.J.; Werner, T. Magnetic anisotropy of some phyllosilicates. Tectonophysics 1994, 235, 223–248. [Google Scholar] [CrossRef]













| Senor Type/Carrier Platform | Sensor | Resolution Spatial/Spectral | Bands/Sampling Range/Frequency | Data Product |
|---|---|---|---|---|
| Snapshot camera/Fixed-wing UAS | Parrot S.O.D.A. | 5472 × 3648/ – | 3/RGB/0.3 Hz | Orthomosaic-RGB, digital surface model |
| Snapshot camera/Fixed-wing UAS | Parrot Sequoia | 1280 × 960/10–40 nm (FWHM) | 4/550–790 nm/0.3 Hz | Orthomosaic multispectral |
| Frame-based camera/Multicopter UAS | Senop Rikola | 1010 × 648/8 nm | 50/504–900 nm/manual | Orthomosaic hyperspectral |
| Three-component fluxgate/Fixed-wing UAS | Radai magnetometer | – /0.5 nT | 1/±100,000 nT/10 Hz | Magnetic raster grid |
| Lithology | Almqvist et al., 2017 [44] | V. Laakso, 2019 [28] | Measured | Used |
|---|---|---|---|---|
| Dolerite | 1.26 × 10−4 – 1.29 × 10−3 | 1.0 × 10−2 – 1.6 × 10−1 | 7.0 × 10−4 – 1.35 × 10−2 | 1.0 × 10−5 – 1.7 × 10−2 |
| Carbonatite–Glimmerite | 4.27 × 10−4 – 2.09 × 10−1 | 1.3 × 10−1 – 2.1 × 10−1 | 1.0 × 10−4 – 1.1 × 10−2 | 3.2 × 10−3 – 2.5 × 10−2 |
| Feldspar–Pegmatite | – | 0 – 5.0 × 10−4 | 7 × 10−5 – 1.4 × 10−4 | 1.0 × 10−5 – 5.0 × 10−4 |
| Fenite | – | 1.3 × 10−1 – 1.5 × 10−1 | 1 × 10−6 – 1 × 10−5 | – |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jackisch, R.; Lorenz, S.; Kirsch, M.; Zimmermann, R.; Tusa, L.; Pirttijärvi, M.; Saartenoja, A.; Ugalde, H.; Madriz, Y.; Savolainen, M.; et al. Integrated Geological and Geophysical Mapping of a Carbonatite-Hosting Outcrop in Siilinjärvi, Finland, Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 2998. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12182998
Jackisch R, Lorenz S, Kirsch M, Zimmermann R, Tusa L, Pirttijärvi M, Saartenoja A, Ugalde H, Madriz Y, Savolainen M, et al. Integrated Geological and Geophysical Mapping of a Carbonatite-Hosting Outcrop in Siilinjärvi, Finland, Using Unmanned Aerial Systems. Remote Sensing. 2020; 12(18):2998. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12182998
Chicago/Turabian StyleJackisch, Robert, Sandra Lorenz, Moritz Kirsch, Robert Zimmermann, Laura Tusa, Markku Pirttijärvi, Ari Saartenoja, Hernan Ugalde, Yuleika Madriz, Mikko Savolainen, and et al. 2020. "Integrated Geological and Geophysical Mapping of a Carbonatite-Hosting Outcrop in Siilinjärvi, Finland, Using Unmanned Aerial Systems" Remote Sensing 12, no. 18: 2998. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12182998