
Development of a Parcel-Level Land Boundary Extraction Algorithm for Aerial Imagery of Regularly Arranged Agricultural Areas





Abstract
:1. Introduction
2. Development of a Cropland Boundary Extraction Algorithm
2.1. Algorithm Components
2.1.1. Image Contour and Suzuki85 Algorithm
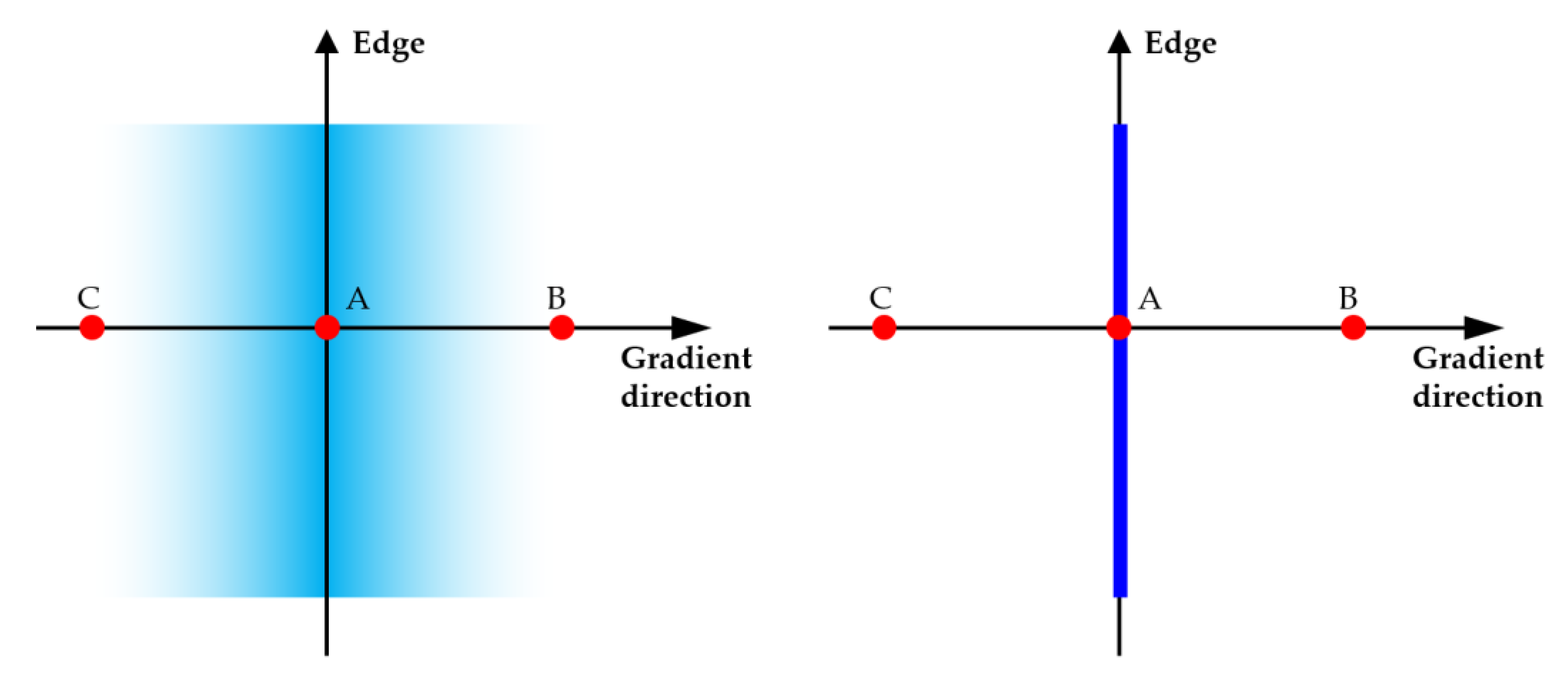
2.1.2. Canny Edge Detection
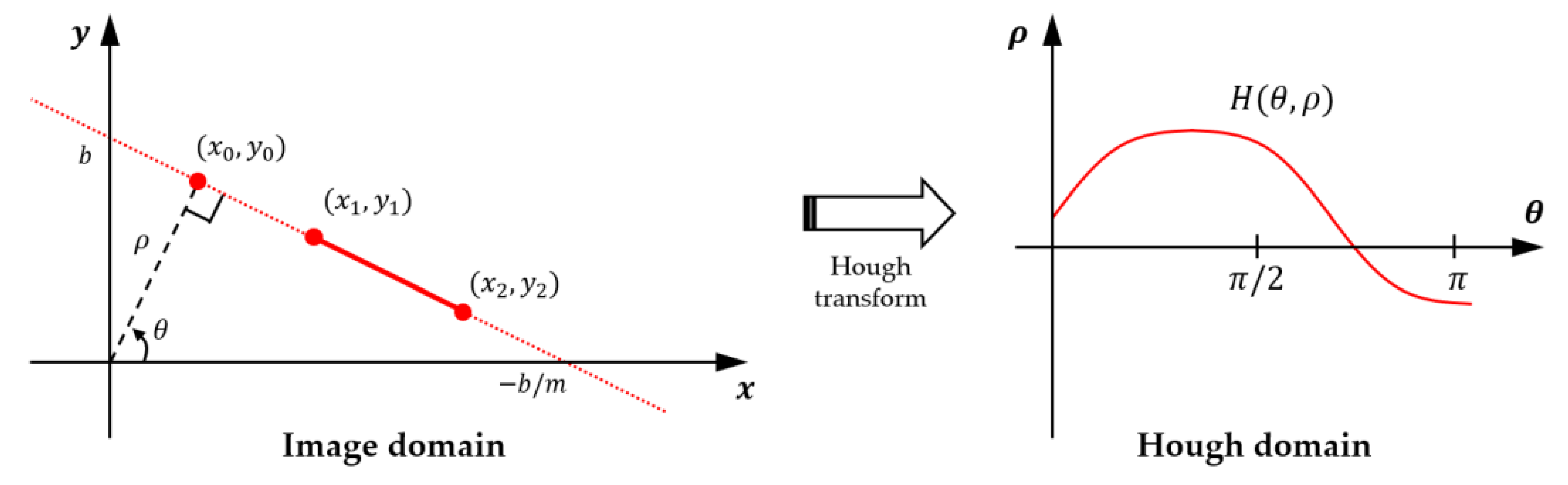
2.1.3. Hough Transform
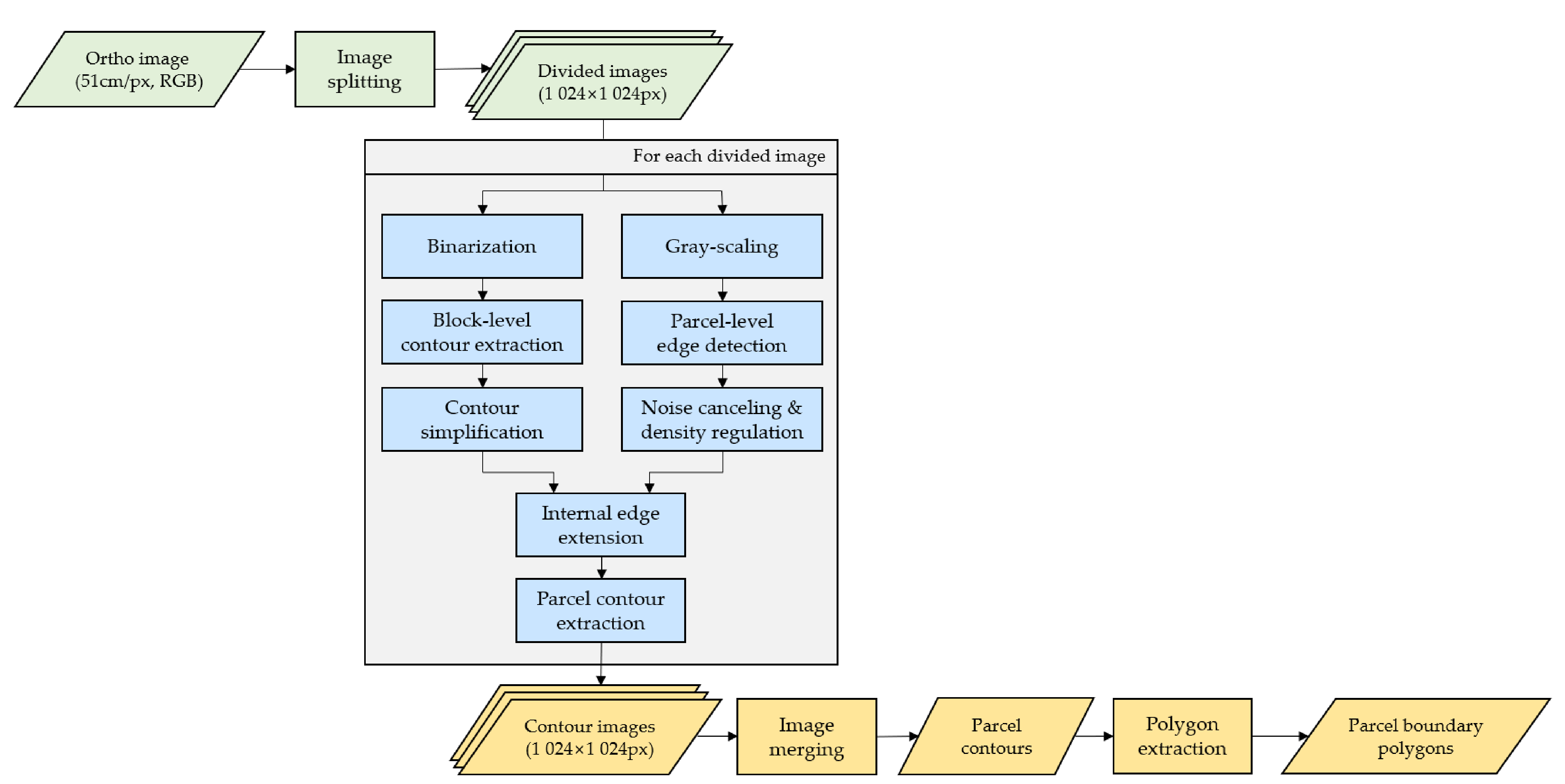
2.2. Development of a Parcel Boundary Extraction Algorithm
2.2.1. Image Splitting and Merging
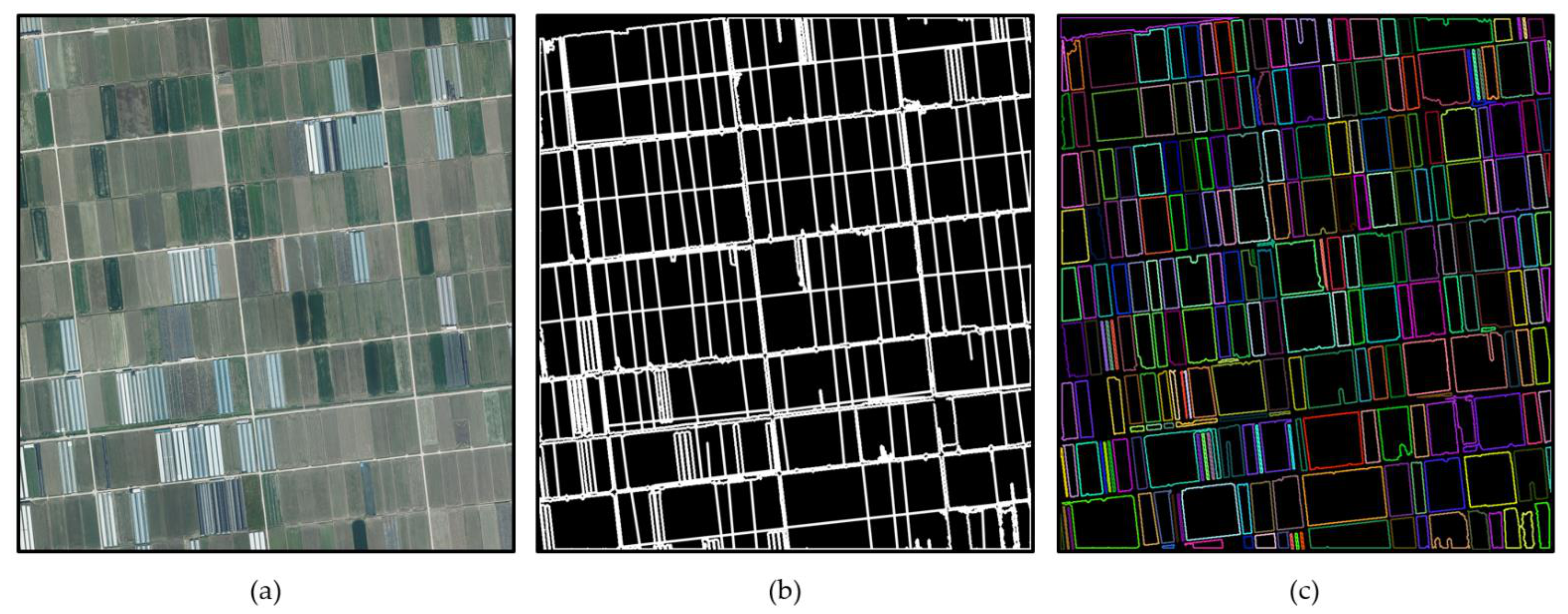
2.2.2. Block-Level Contour Extraction
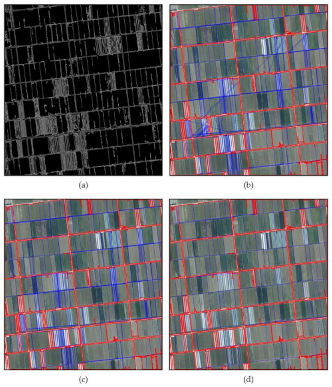
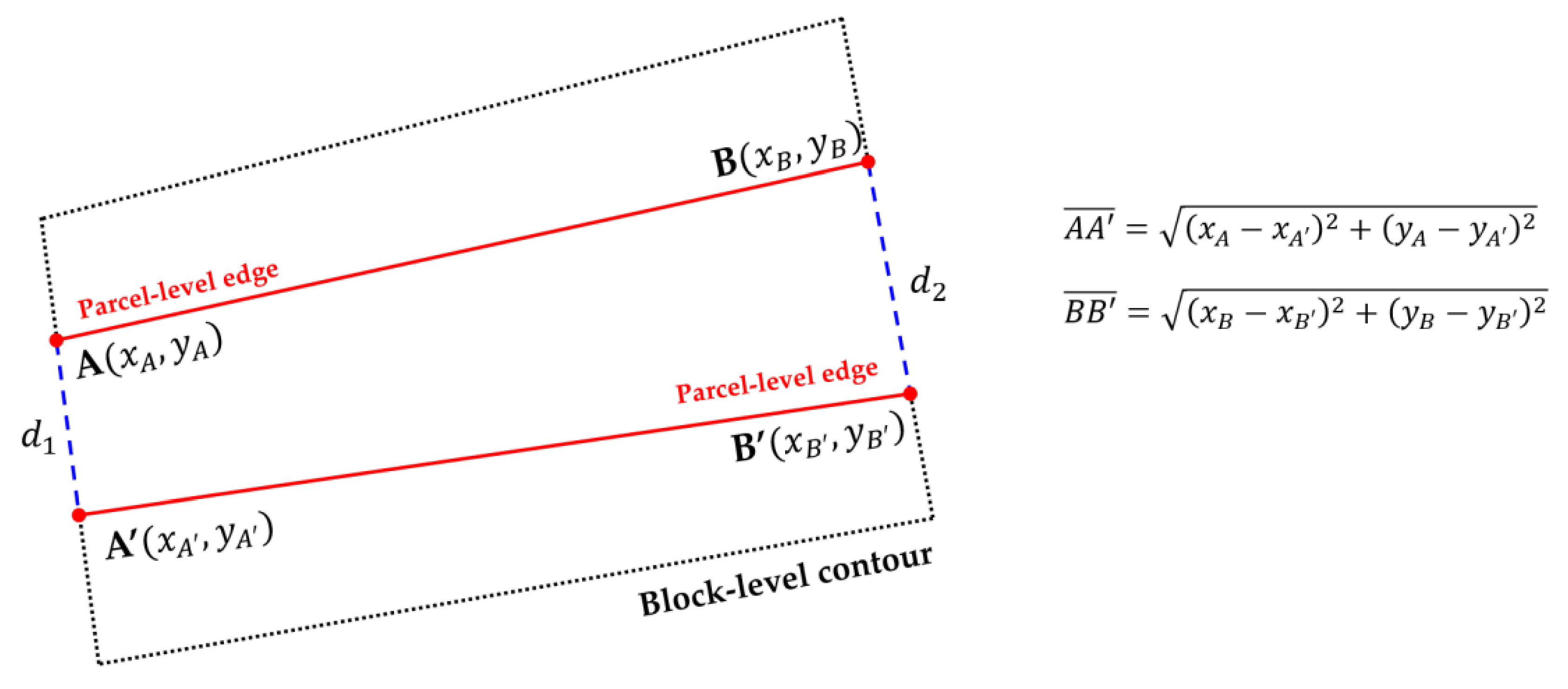
2.2.3. Parcel-Level Edge Extraction from Block-Level Contours
2.2.4. Parcel Contour Extraction
3. Assessment of Developed Boundary Extraction Algorithm
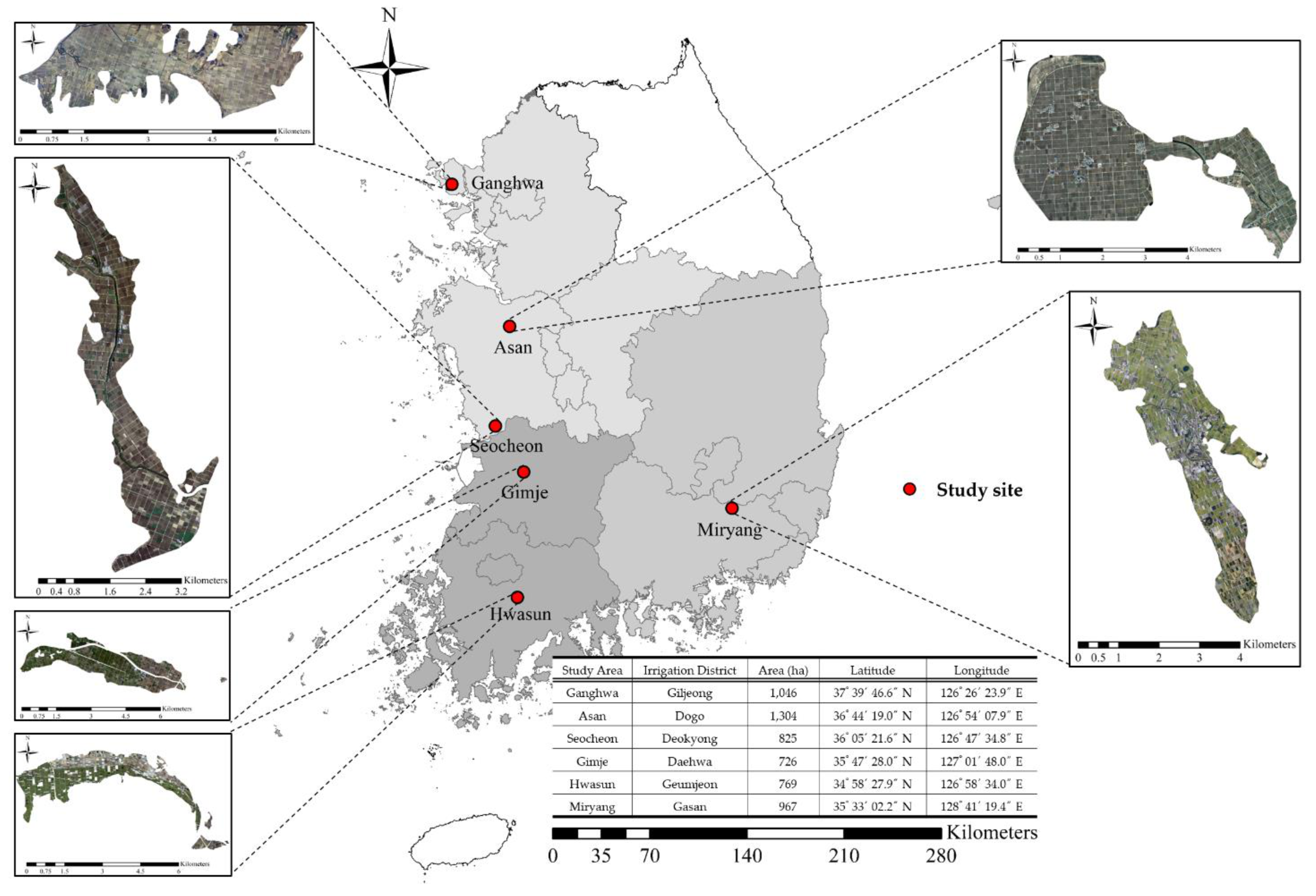
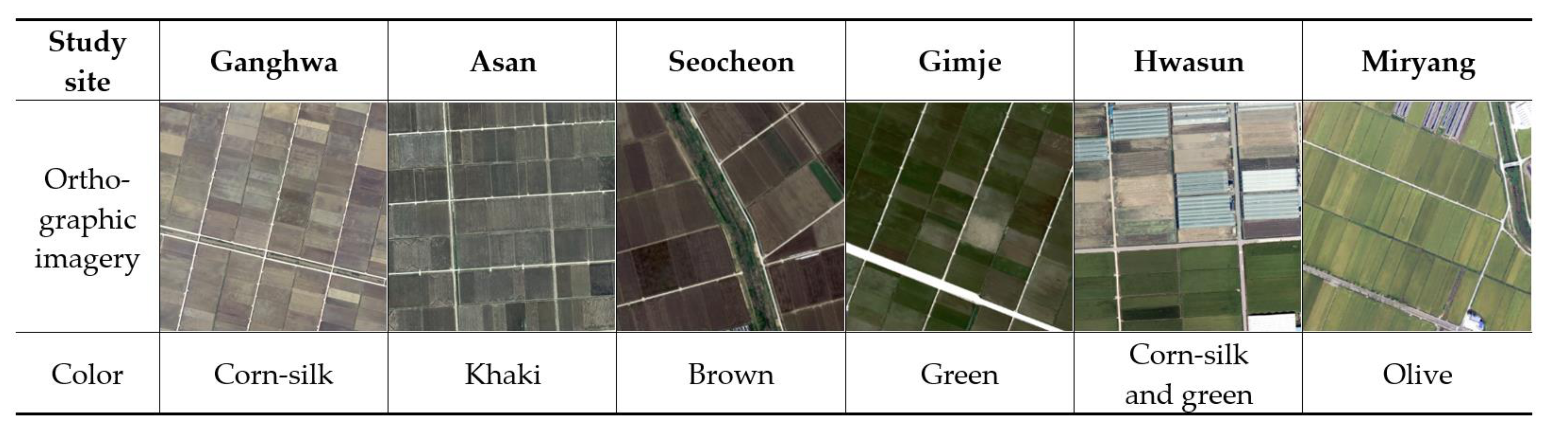
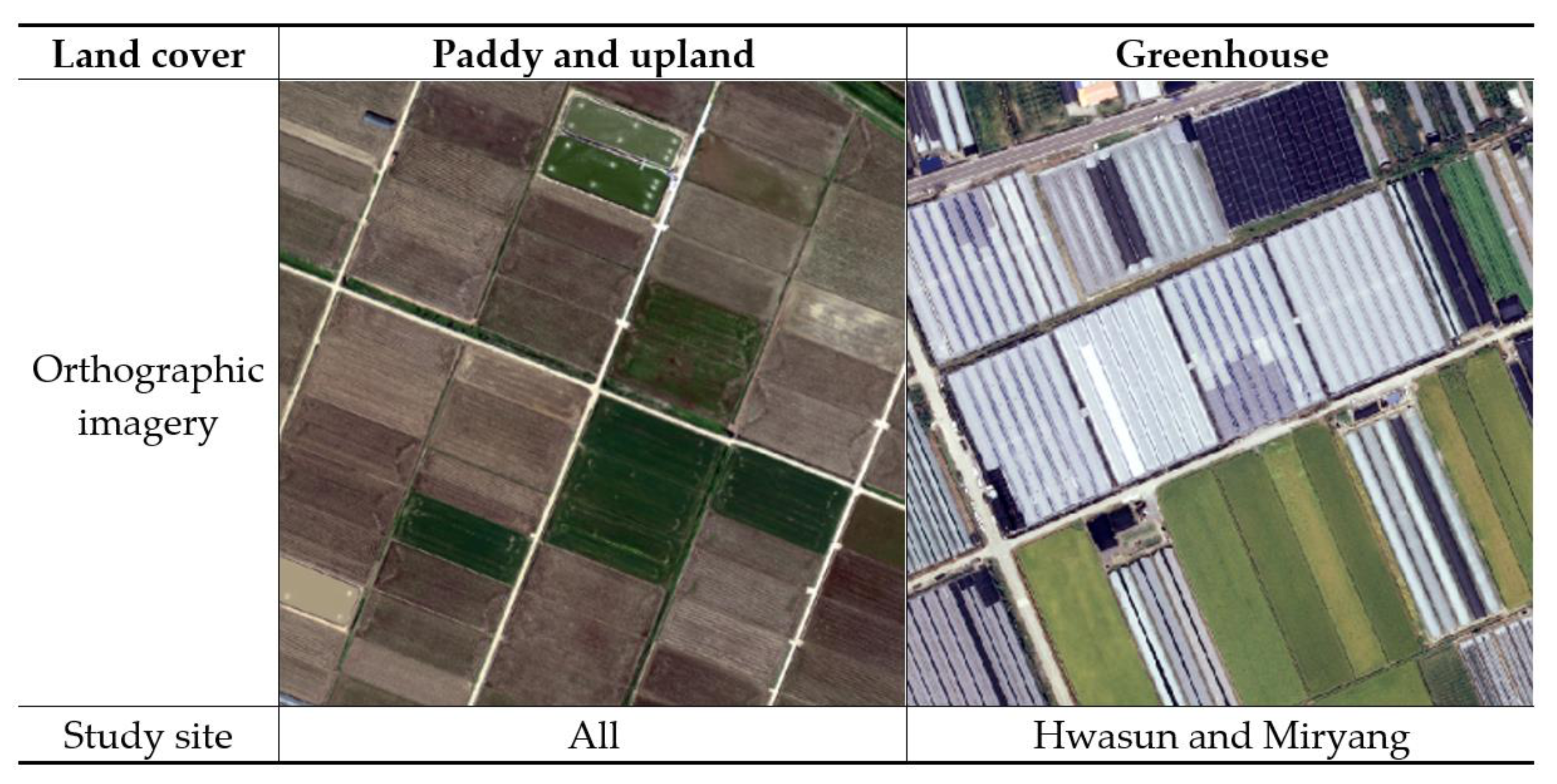
3.1. Study Site
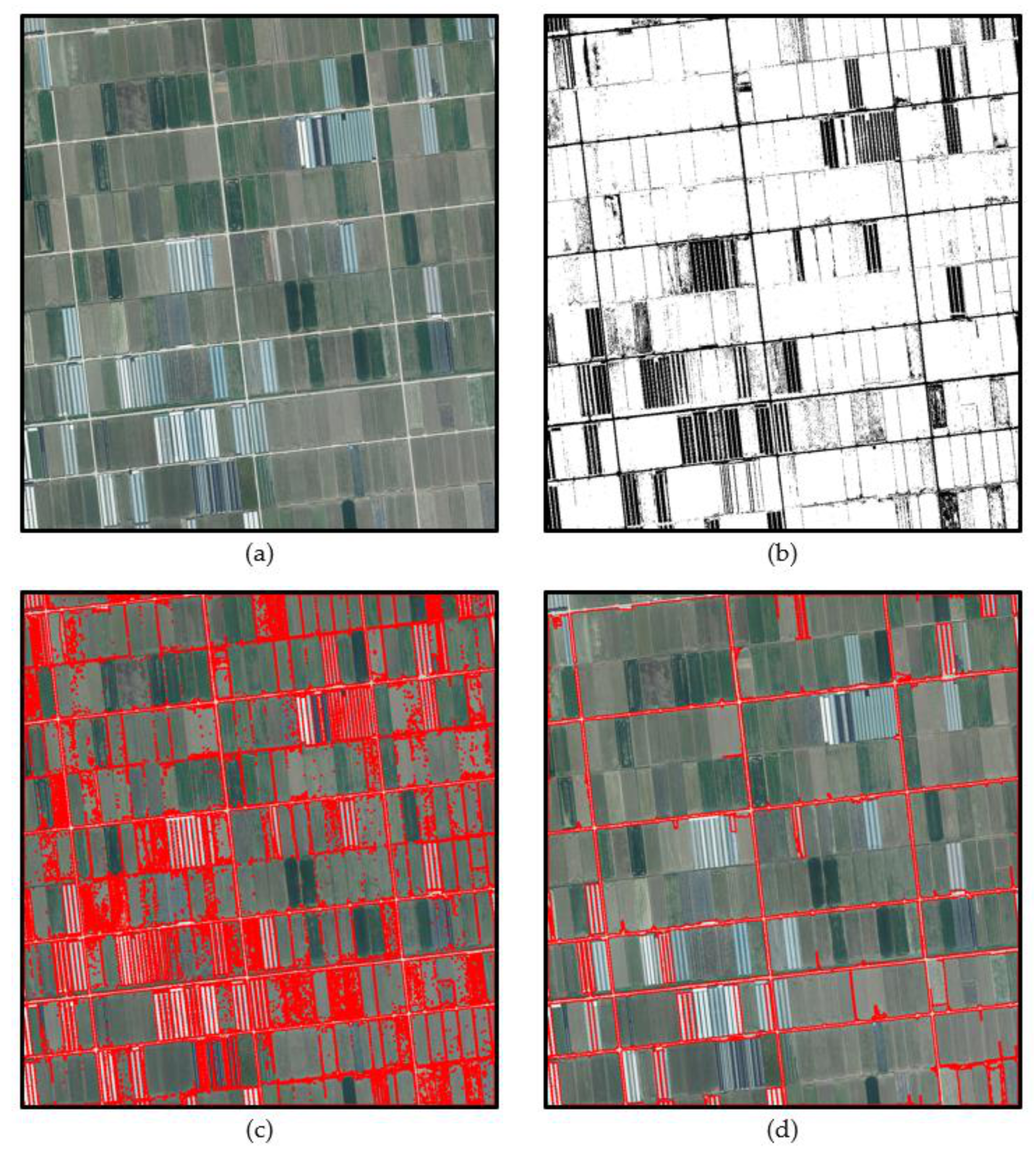
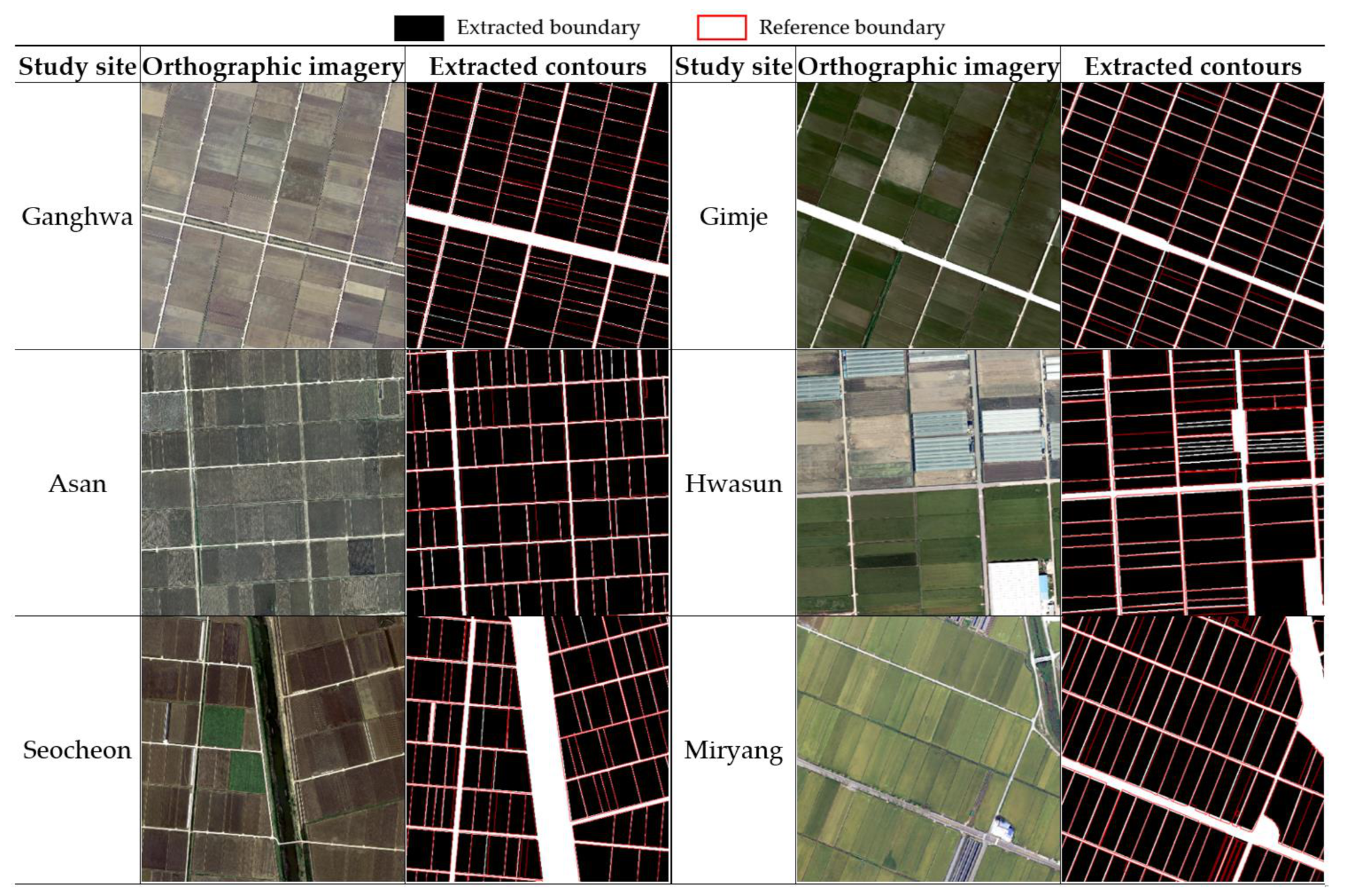
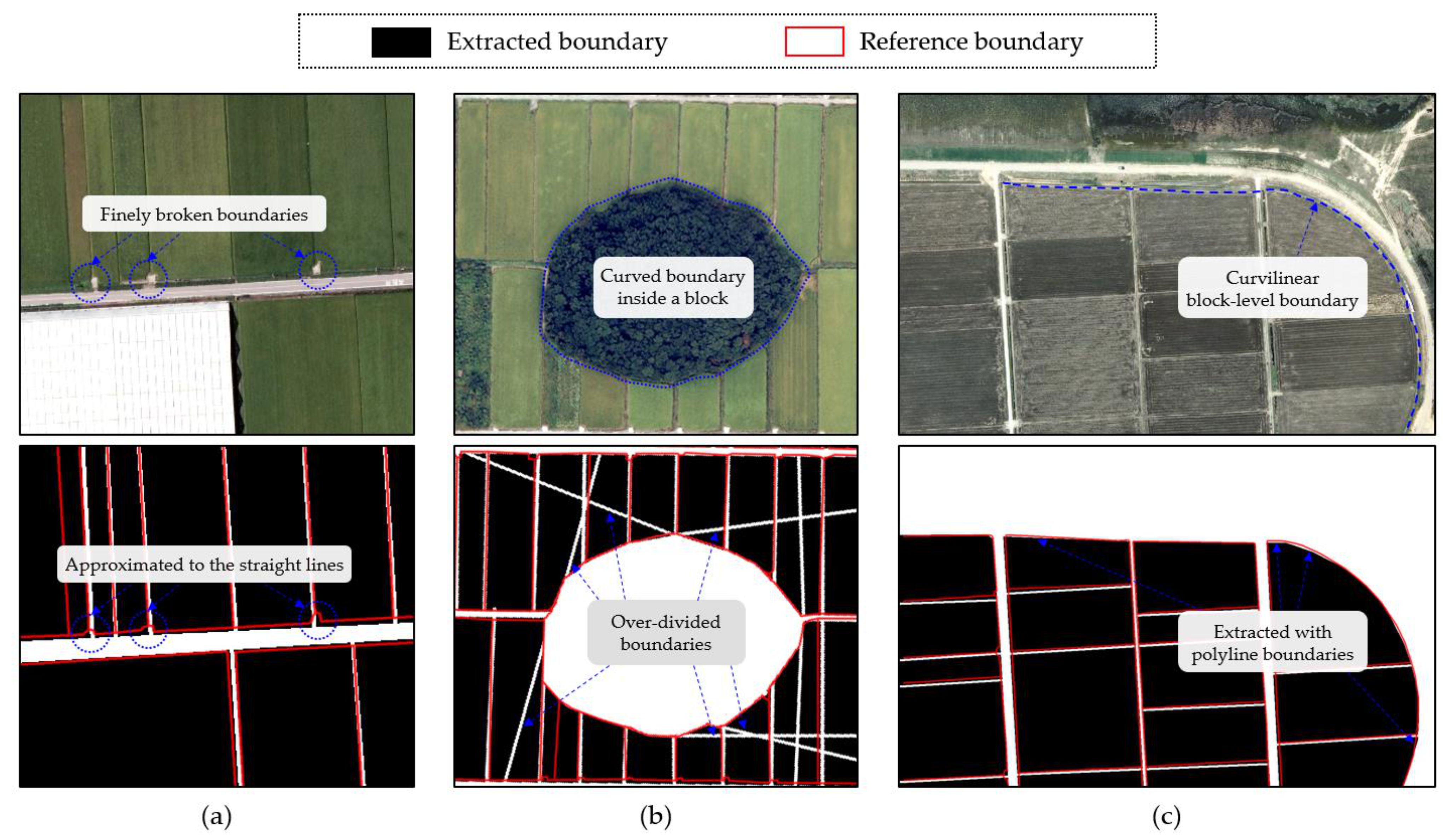
3.2. Parcel Boundary Extraction
3.3. Boundary Extraction Accuracy Assessment
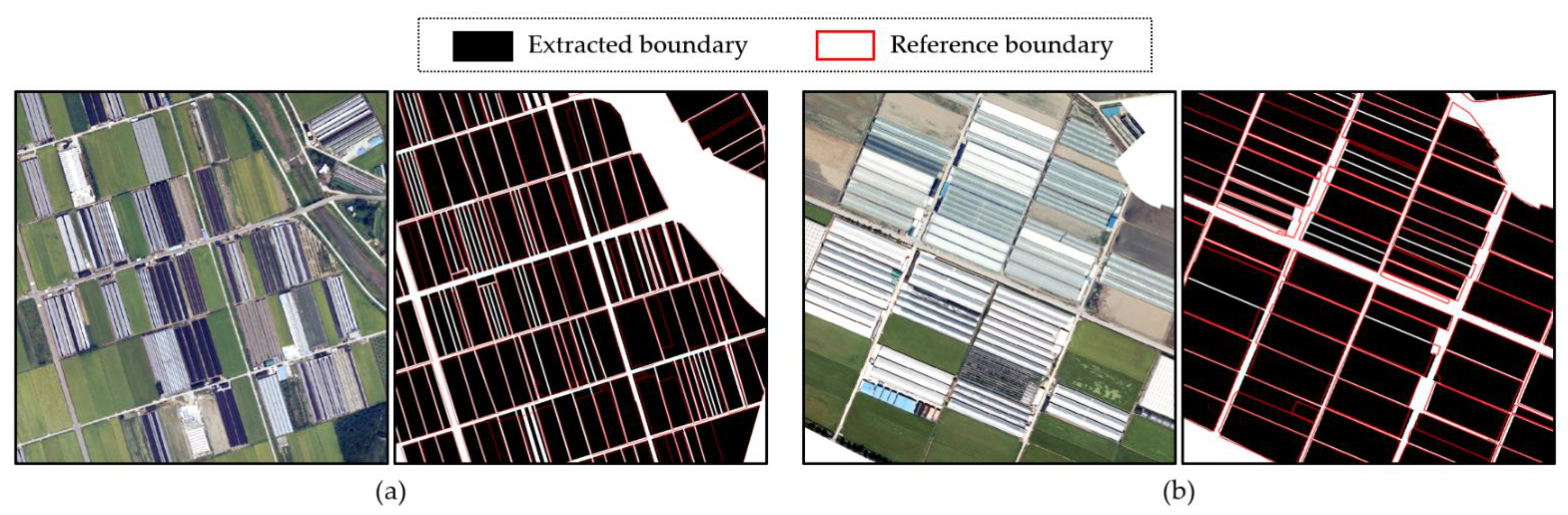
3.3.1. Matching the Extracted Boundaries with the Reference Boundaries
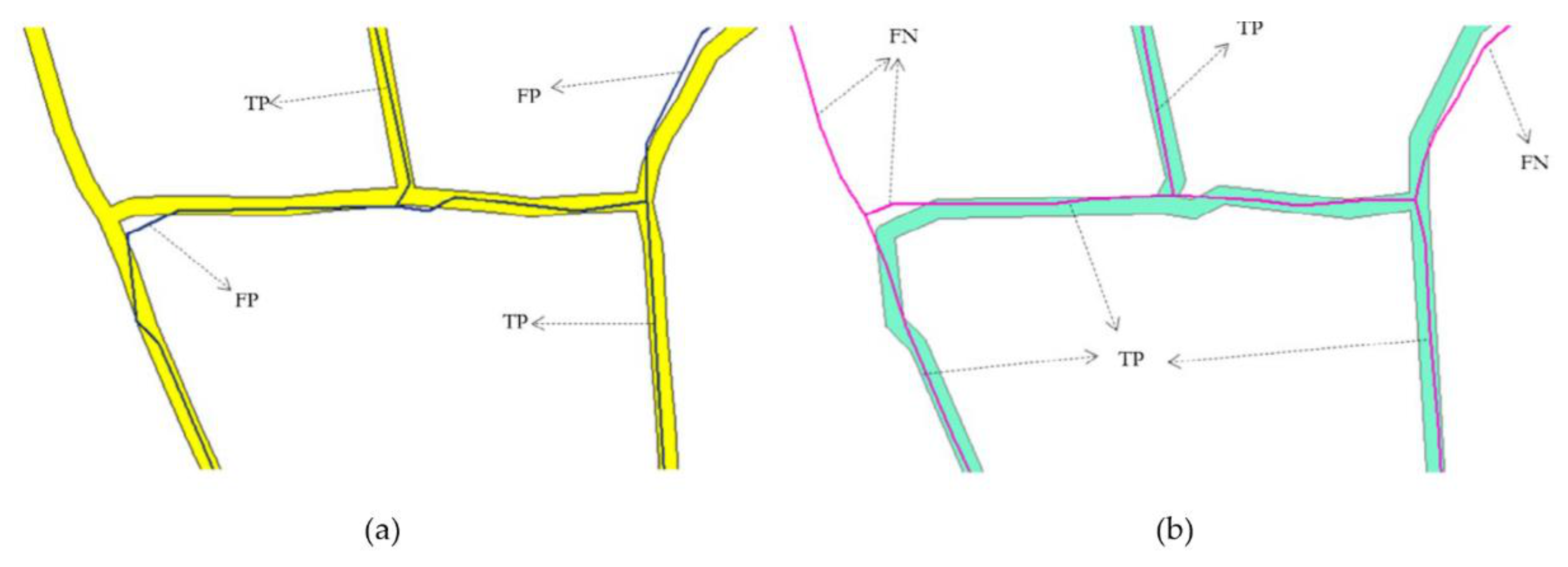
3.3.2. Boundary Level Accuracy Assessments
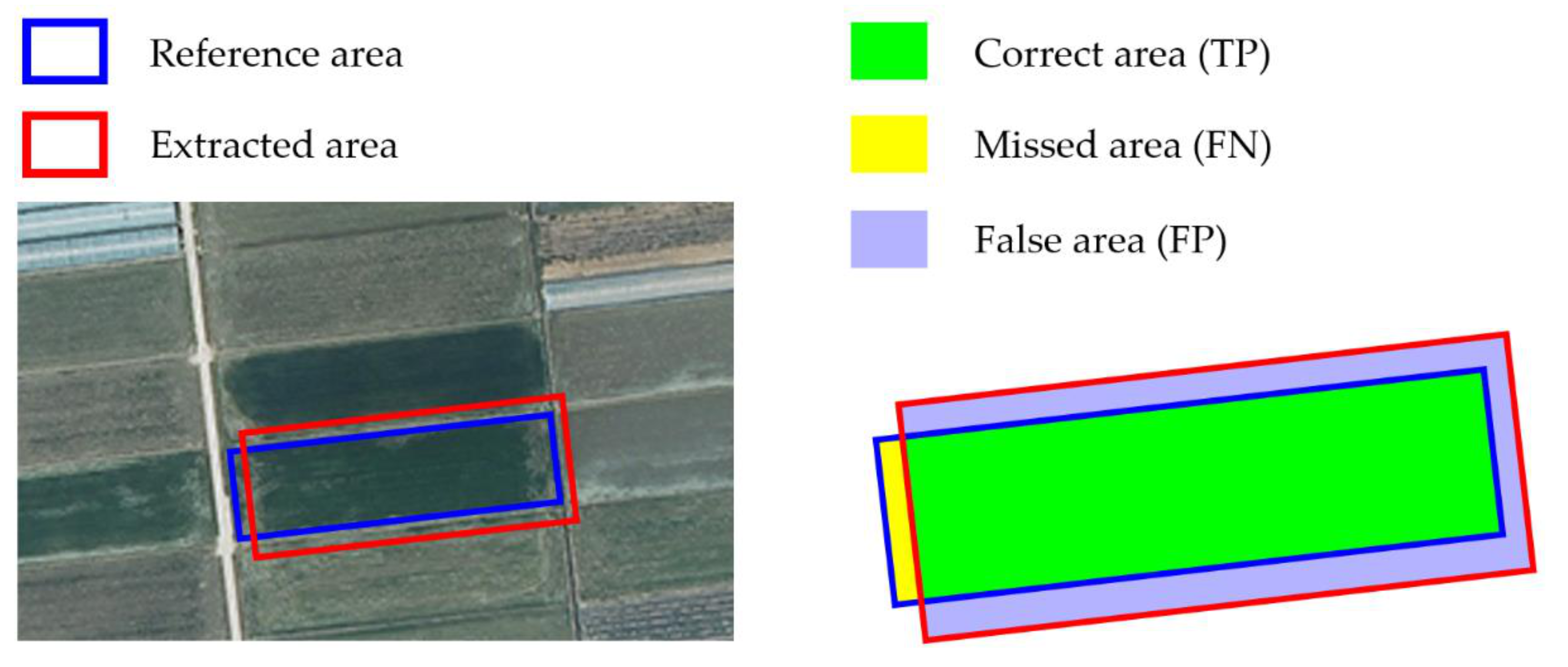
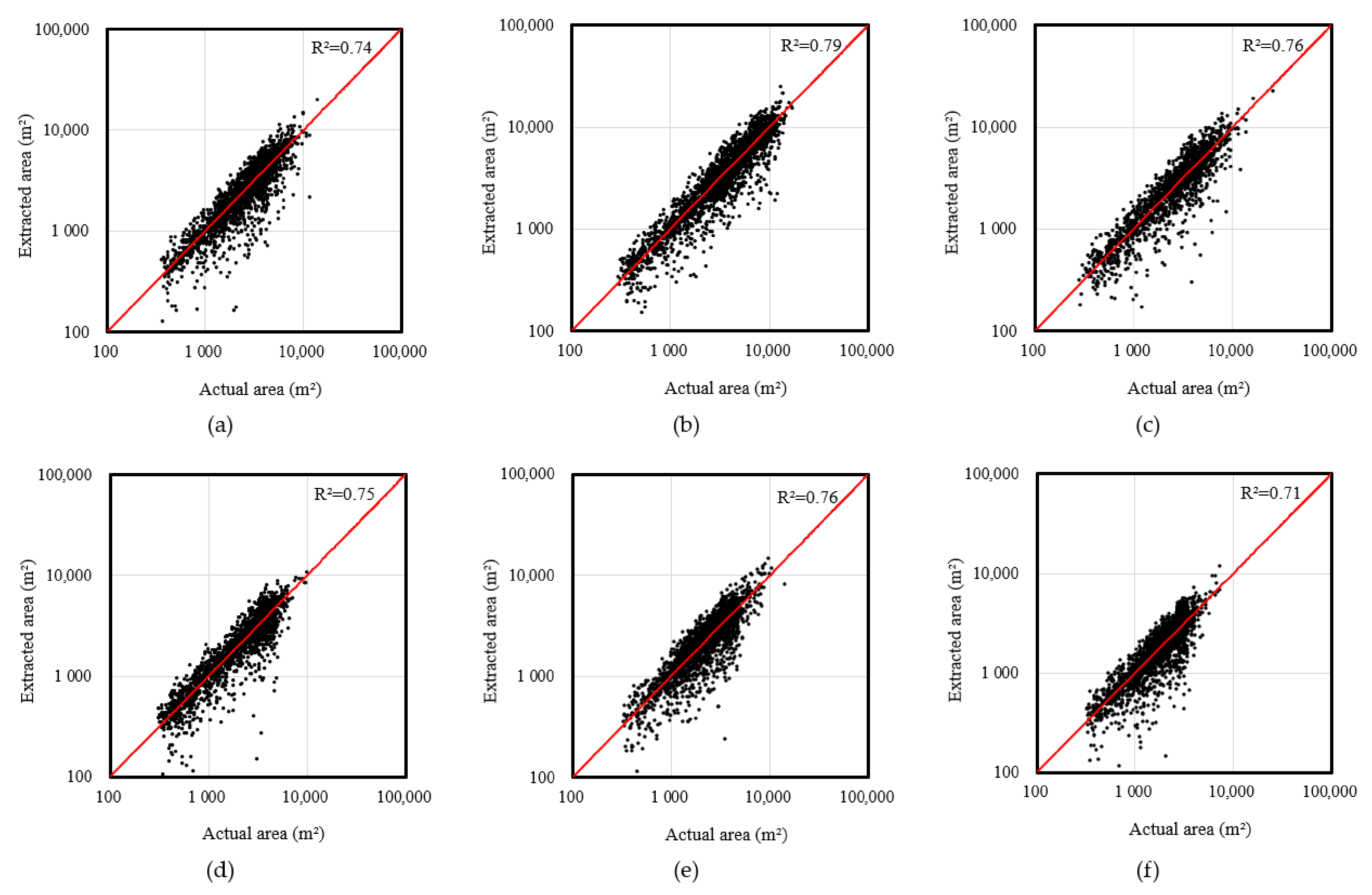
3.3.3. Section Level Accuracy Assessments
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Frédéricque, B.; Daniel, S.; Bédard, Y.; Paparoditis, N. Populating a building multi representation data base with photogrammetric tools: Recent progress. ISPRS J. Photogramm. Remote Sens. 2008, 63, 441–460. [Google Scholar] [CrossRef]
- Xie, Y.; Weng, A.; Weng, Q. Population estimation of urban residential communities using remotely sensed morphologic data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1111–1115. [Google Scholar]
- Crommelinck, S.; Bennett, R.; Gerke, M.; Yang, M.Y.; Vosselman, G. Contour Detection for UAV-Based Cadastral Mapping. Remote Sens. 2017, 9, 171. [Google Scholar] [CrossRef] [Green Version]
- Fetai, B.; Oštir, K.; Kosmatin Fras, M.; Lisec, A. Extraction of Visible Boundaries for Cadastral Mapping Based on UAV Imagery. Remote Sens. 2019, 11, 1510. [Google Scholar] [CrossRef] [Green Version]
- Paravolidakis, V.; Ragia, L.; Moirogiorgou, K.; Zervakis, M.E. Automatic coastline extraction using edge detection and optimization procedures. Geosciences 2018, 8, 407. [Google Scholar] [CrossRef] [Green Version]
- Turker, M.; Kok, E.M. Field-based sub-boundary extraction from remote sensing imagery using perceptual grouping. ISPRS J. Photogramm. Remote Sens. 2013, 79, 106–121. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P. Automated crop field extraction from multi-temporal web enabled Landsat data. Remote Sens. Environ. 2014, 144, 42–64. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.B.; Lee, K.I.; Choi, H.S.; Cho, W.S.; Cho, Y.W. Extracting building boundary from aerial LiDAR points data using extended χ algorithm. J. Korean Soc. Surv. Geod. Photogram. Cartogr. 2013, 31, 111–119. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.H.; Kim, Y.I. Extraction and modeling of curved building boundaries from airborne lidar data. J. Korean Soc. Geospat. Inf. Syst. 2012, 20, 117–125. [Google Scholar]
- Segl, K.; Kaufmann, H. Detection of small objects from high-resolution panchromatic satellite imagery based on supervised image segmentation. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2080–2083. [Google Scholar] [CrossRef]
- Da Costa, J.P.; Michelet, F.; Germain, C.; Lavialle, O.; Grimier, G. Delineation of vine parcels by segmentation of high resolution remote sensed images. Precis Agric. 2007, 8, 95–110. [Google Scholar] [CrossRef]
- Yang, G.; Zhang, Q.; Zhang, G. EANet: Edge-Aware Network for the extraction of buildings from aerial images. Remote Sens. 2020, 12, 2161. [Google Scholar] [CrossRef]
- Rabbi, J.; Ray, N.; Schubert, M.; Chowdhury, S.; Chao, D. Small-object detection in remote sensing images with end-to-end edge-enhanced GAN and object detector network. Remote Sens. 2020, 12, 1432. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Daniel, S.; Guériot, D.; Sintès, C.; Le Caillec, J.-M. Super-resolution-based snake model—An unsupervised method for large-scale building extraction using airborne LiDAR data and optical image. Remote Sens. 2020, 12, 1702. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Xu, C.; Prince, J.L. Snakes, shapes, and gradient vector flow. IEEE Trans. Image Process. 1998, 7, 359–369. [Google Scholar]
- Khadanga, G.; Jain, K. Cadastral parcel boundary extraction from UAV images. J. Indian Soc. Remote Sens. 2020. [Google Scholar] [CrossRef]
- North, H.C.; Pairman, D.; Belliss, S.E. Boundary delineation of agricultural fields in multitemporal satellite imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 237–251. [Google Scholar] [CrossRef]
- Wagner, M.P.; Oppelt, N. Extracting agricultural fields from remote sensing imagery using graph-based growing contours. Remote Sens. 2020, 12, 1205. [Google Scholar] [CrossRef] [Green Version]
- Kang, M.S.; Park, S.W.; Yoon, K.S. Land cover classification of image data using artificial neural networks. J. Korean Soc. Rural Plan. 2006, 12, 75–83. [Google Scholar]
- Park, J.; Jang, S.; Hong, R.; Suh, K.; Song, I. Development of land cover classification model using AI based FusionNet network. Remote Sens. 2020, 12, 3171. [Google Scholar] [CrossRef]
- García-Pedrero, A.; Gonzalo-Martin, C.; Lillo-Saavedra, M. A machine learning approach for agricultural parcel delineation through agglomerative segmentation. Int. J. Remote Sens. 2016, 38, 1809–1819. [Google Scholar] [CrossRef] [Green Version]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Canny, J. A Computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Hough, P.V.C. Method and Means for Recognizing Complex Patterns. U.S. Patent 3,069,654, 28 December 1962. [Google Scholar]
- Pratt, W.K. Digital Image Processing: PIKS Scientific Inside, 3rd ed.; John Wiley and Sons, Inc.: New York, NY, USA, 2001; p. 736. [Google Scholar]
- Hlavac, V.; Sonka, M.; Boyle, R. Image Processing, Analysis, and Machine Vision; Springer: Boston, MA, USA, 1993; pp. 112–191. [Google Scholar]
- Rajashekar, P. Evaluation of stopping criterion in contour tracing algorithms. Int. J. Comput. Sci. Inf. Technol. 2012, 3, 3888–3894. [Google Scholar]
- Pavlidis, T. Algorithms for Graphics and Image Processing, 1st ed.; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1982; p. 438. [Google Scholar]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 5, 120–125. [Google Scholar]
- Lee, D.Y.; Shin, D.K.; Shin, D.I. A finger counting method for gesture recognition. J. Internet Comput. Serv. 2016, 17, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Hagen, N.; Decennia, E.L. Gaussian profile estimation in two dimensions. Appl. Opt. 2008, 47, 6842–6851. [Google Scholar] [CrossRef]
- Dim, J.R.; Takamura, T. Alternative approach for satellite cloud classification: Edge gradient application. Adv. Meteorol. 2013, 2013, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.W. Modified canny edge detection algorithm for detecting subway platform screen door invasion. J. Korea Inst. Electron. Commun. Sci. 2019, 14, 663–670. [Google Scholar]
- Richard, O.D.; Peter, E.H. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1971, 15, 11–15. [Google Scholar]
- Lakhwani, K.; Murarka, P.D.; Chauhan, N.S. Color space transformation for visual enhancement of noisy color image. Int. J. ICT Manag. 2015, 3, 9–13. [Google Scholar]
- Otsu, N. A Threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. In Classics in Cartography: Reflections on Influential Articles from Cartographica; Dodge, M., Ed.; John Wiley and Sons, Inc.: New York, NY, USA, 2011; pp. 15–28. [Google Scholar]
- Wu, S.T.; Marquez, M. A non-self-intersection Douglas-Peucker algorithm. In Proceedings of the 16th Brazilian Symposium on Computer Graphics and Image Processing (SIBGRAPI 2003), Sao Carlos, Brazil, 12–15 October 2003; pp. 60–66. [Google Scholar]
- Shimrat, M. Algorithm 112: Position of point relative to polygon. Commun. ACM 1962, 5, 434. [Google Scholar] [CrossRef]
- Hormann, K.; Agathos, A. The point in polygon problem for arbitrary polygons. Comput. Geom. 2001, 20, 131–144. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; Shi, W.; Miao, Z.; Hao, M. Accuracy assessment measures for object extraction from remote sensing images. Remote Sens. 2018, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Heipke, C.; Mayer, H.; Wiedemann, C. Evaluation of automatic road extraction. Int. Arch. Photogramm. Remote Sens. 1997, 32, 151–156. [Google Scholar]
- Tveite, H. An accuracy assessment method for geographical line data sets based on buffering. Int. J. Geogr. Inf. Sci. 1999, 13, 27–47. [Google Scholar] [CrossRef]
- Jin, X.; Davis, C.H. Automated building extraction from high-resolution satellite imagery in urban areas using structural, contextual, and spectral information. EURASIP J. Adv. Signal Process. 2005, 2005, 2196–2206. [Google Scholar] [CrossRef] [Green Version]
- Wassie, Y.A.; Koeva, M.N.; Bennett, R.M.; Lemmen, C.H.J. A procedure for semi-automated cadastral boundary feature extraction from high-resolution satellite imagery. J. Spat. Sci. 2018, 63, 75–92. [Google Scholar] [CrossRef] [Green Version]
- IAAO. Standard on Digital Cadastral Maps and Parcel Identifiers; International Association of Assessing Officers: Kanas City, MI, USA, 2015. [Google Scholar]
- Cal, A. High-resolution object-based building extraction using PCA of LiDAR nDSM and aerial photos. In Spatial Variability in Environmental Science—Patterns, Processes, and Analyses; Tiefenbacher, J.P., Poreh, D., Eds.; IntechOpen: London, UK, 2020. [Google Scholar]
- Comert, R.; Avdan, U.; Gorum, T.; Nefeslioglu, H.A. Mapping of shallow landslides with object-based image analysis from unmanned aerial vehicle data. Eng. Geol. 2019, 260, 105264. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Extracted Results | |
|---|---|---|
| Positive | Negative | |
| Positive | True positive (TP, correct) | False negative (FN, missed) |
| Negative | False positive (FP, false) | True negative (TN) |
| Study Site | Correctness (%) | Completeness (%) | Quality (%) |
|---|---|---|---|
| Ganghwa | 82.8 | 82.7 | 70.6 |
| Asan | 80.9 | 79.9 | 67.3 |
| Seocheon | 83.9 | 83.4 | 71.9 |
| Gimje | 81.4 | 81.0 | 68.3 |
| Hwasun | 77.2 | 73.9 | 60.6 |
| Miryang | 77.6 | 77.4 | 63.3 |
| Mean | 80.7 | 79.7 | 67.0 |
| Study Site | Total Area of Parcels (m2) | Correctness (%) | Completeness (%) | Quality (%) | ||
|---|---|---|---|---|---|---|
| Reference | Extracted | Correct | ||||
| Ganghwa | 6,809,013 | 6,839,701 | 6,213,570 | 90.8 | 91.3 | 83.6 |
| Asan | 10,480,100 | 10,600,606 | 9,493,488 | 89.6 | 90.6 | 81.9 |
| Seocheon | 5,172,362 | 5,191,725 | 4,672,918 | 90.0 | 90.3 | 82.1 |
| Gimje | 4,335,019 | 4,344,432 | 3,991,849 | 91.9 | 92.1 | 85.2 |
| Hwasun | 5,607,757 | 5,613,631 | 4,895,097 | 87.2 | 87.3 | 77.4 |
| Miryang | 5,145,164 | 5,142,539 | 4,558,913 | 88.7 | 88.6 | 79.6 |
| Mean | 89.7 | 90.0 | 81.6 | |||
| Study Site | Number of Parcels | Correct Rate (%) | False Rate (%) | Missing Rate (%) | |||
|---|---|---|---|---|---|---|---|
| Reference | Correct | False | Missed | ||||
| Ganghwa | 2384 | 2113 | 252 | 276 | 89.3 | 10.7 | 11.6 |
| Asan | 2582 | 2236 | 259 | 275 | 89.6 | 10.4 | 11.0 |
| Seocheon | 1653 | 1508 | 179 | 144 | 89.4 | 10.6 | 8.7 |
| Gimje | 1798 | 1617 | 186 | 167 | 89.7 | 10.3 | 9.4 |
| Hwasun | 2263 | 1903 | 315 | 224 | 85.8 | 14.2 | 10.5 |
| Miryang | 2619 | 2159 | 347 | 210 | 86.2 | 13.8 | 8.9 |
| Mean | 88.3 | 11.7 | 10.0 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, R.; Park, J.; Jang, S.; Shin, H.; Kim, H.; Song, I. Development of a Parcel-Level Land Boundary Extraction Algorithm for Aerial Imagery of Regularly Arranged Agricultural Areas. Remote Sens. 2021, 13, 1167. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13061167
Hong R, Park J, Jang S, Shin H, Kim H, Song I. Development of a Parcel-Level Land Boundary Extraction Algorithm for Aerial Imagery of Regularly Arranged Agricultural Areas. Remote Sensing. 2021; 13(6):1167. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13061167
Chicago/Turabian StyleHong, Rokgi, Jinseok Park, Seongju Jang, Hyungjin Shin, Hakkwan Kim, and Inhong Song. 2021. "Development of a Parcel-Level Land Boundary Extraction Algorithm for Aerial Imagery of Regularly Arranged Agricultural Areas" Remote Sensing 13, no. 6: 1167. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13061167