
Quantitative Evaluation of Gully Erosion Using Multitemporal UAV Data in the Southern Black Soil Region of Northeast China: A Case Study

Abstract
:1. Introduction
2. Materials and Methods
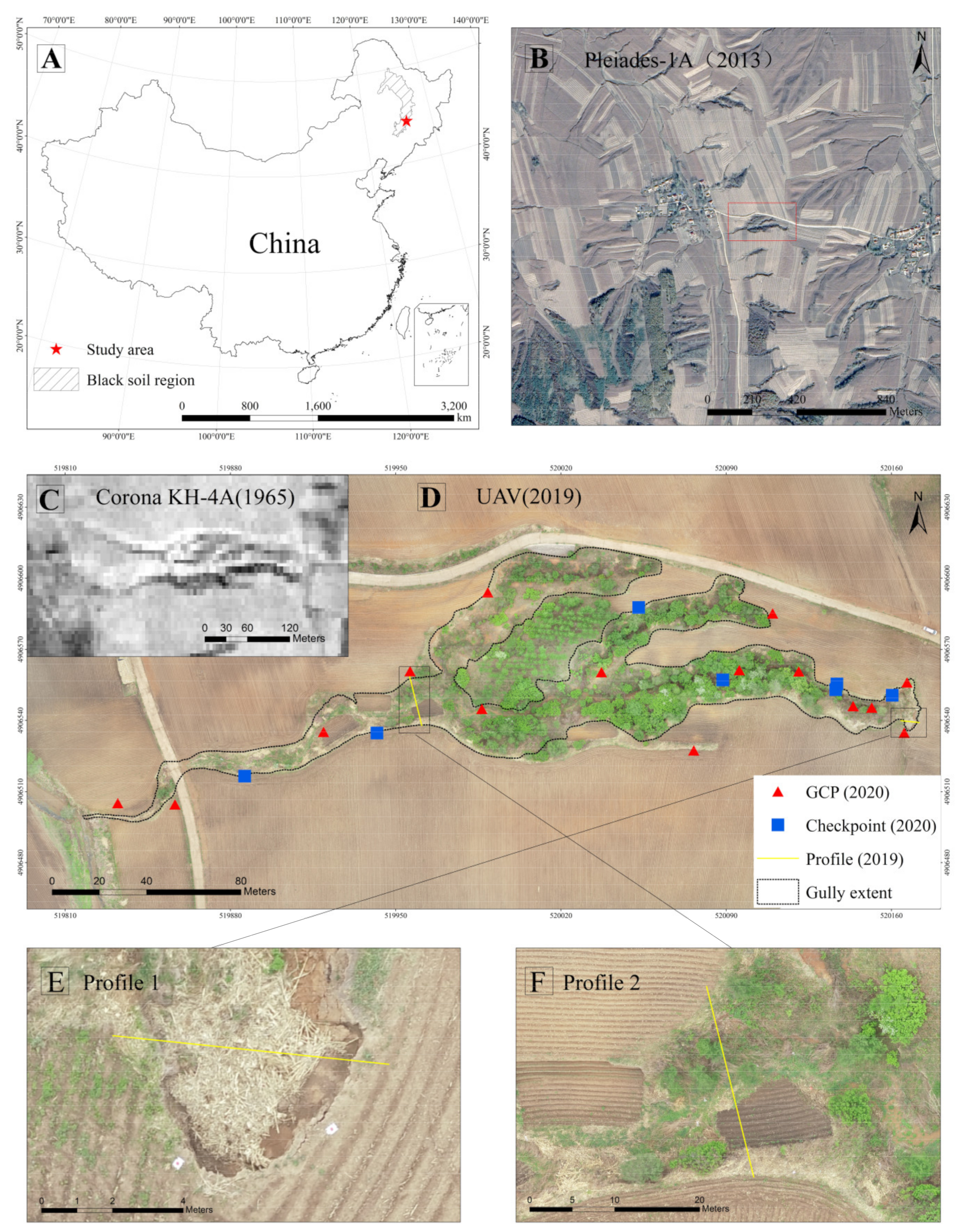
2.1. Study Area
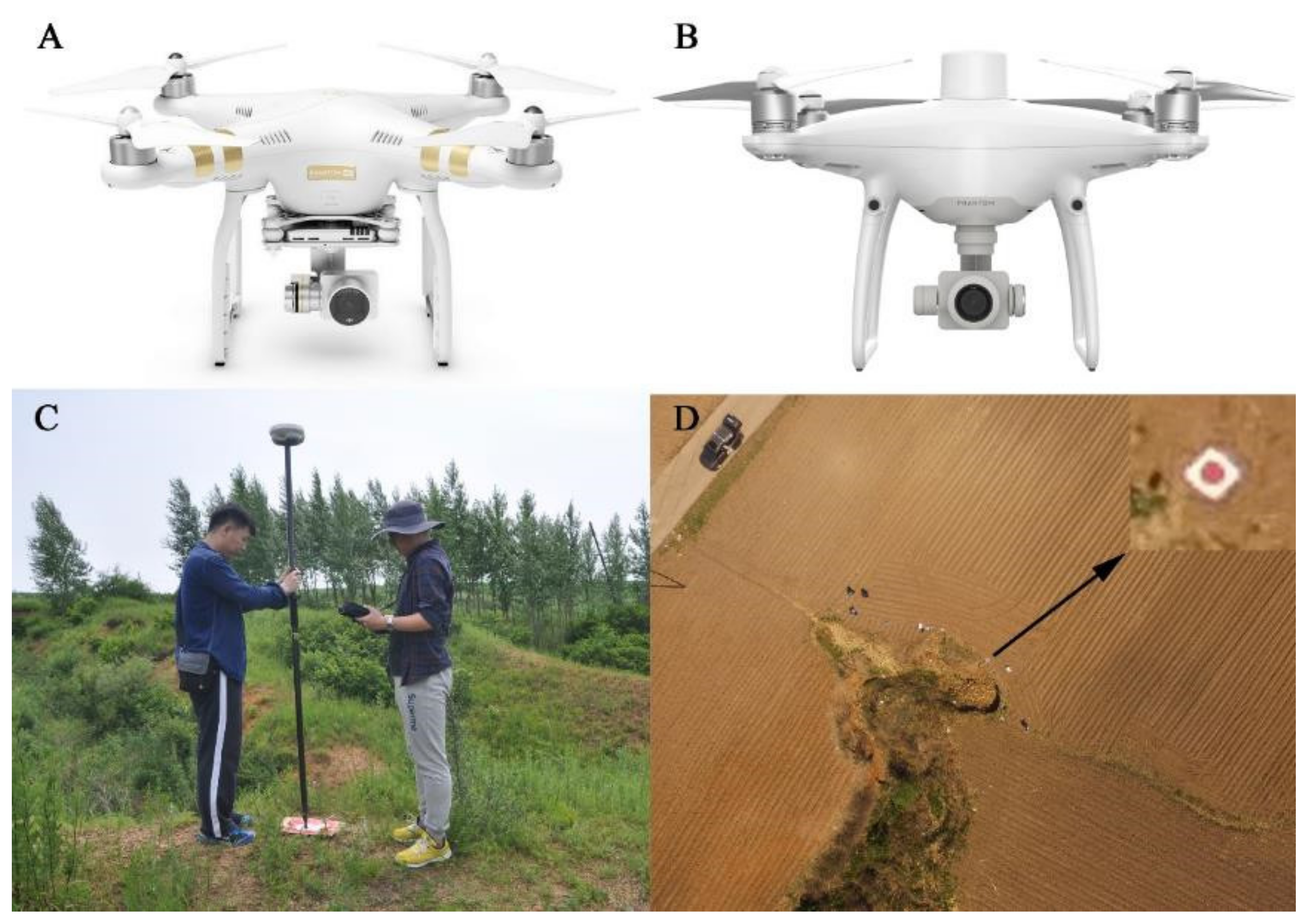
2.2. Data Acquisition
2.3. Data Processing
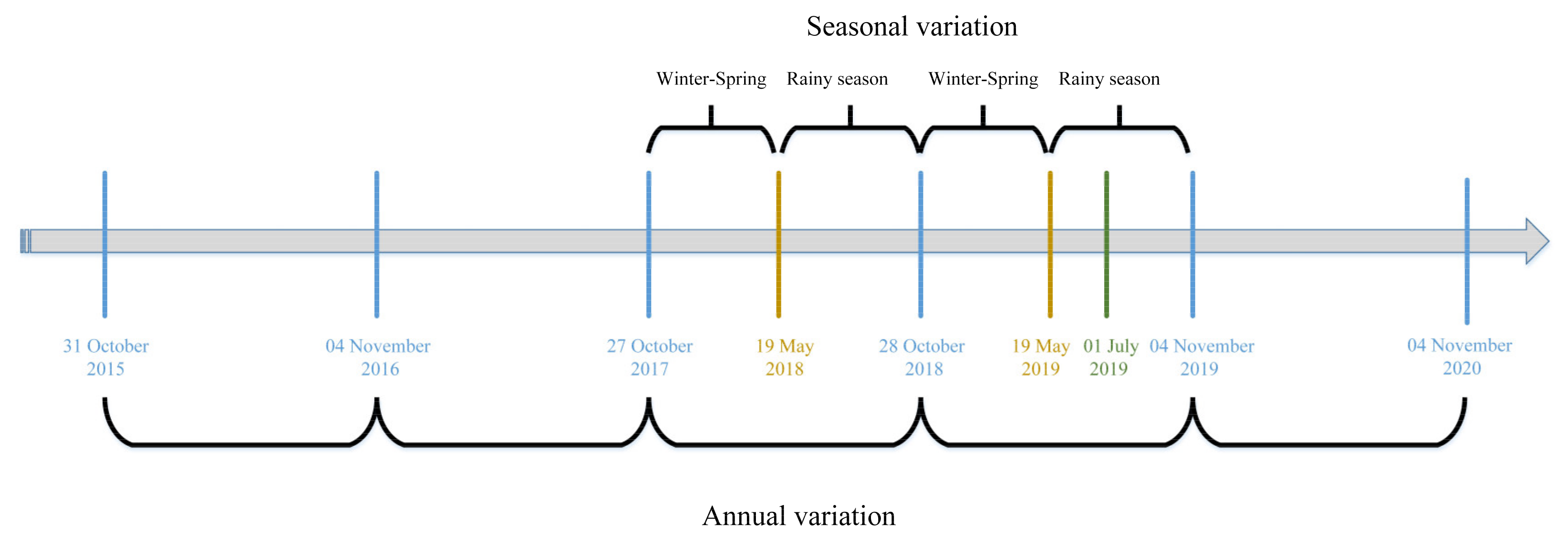
2.4. Monitoring Geomorphological Changes
3. Results
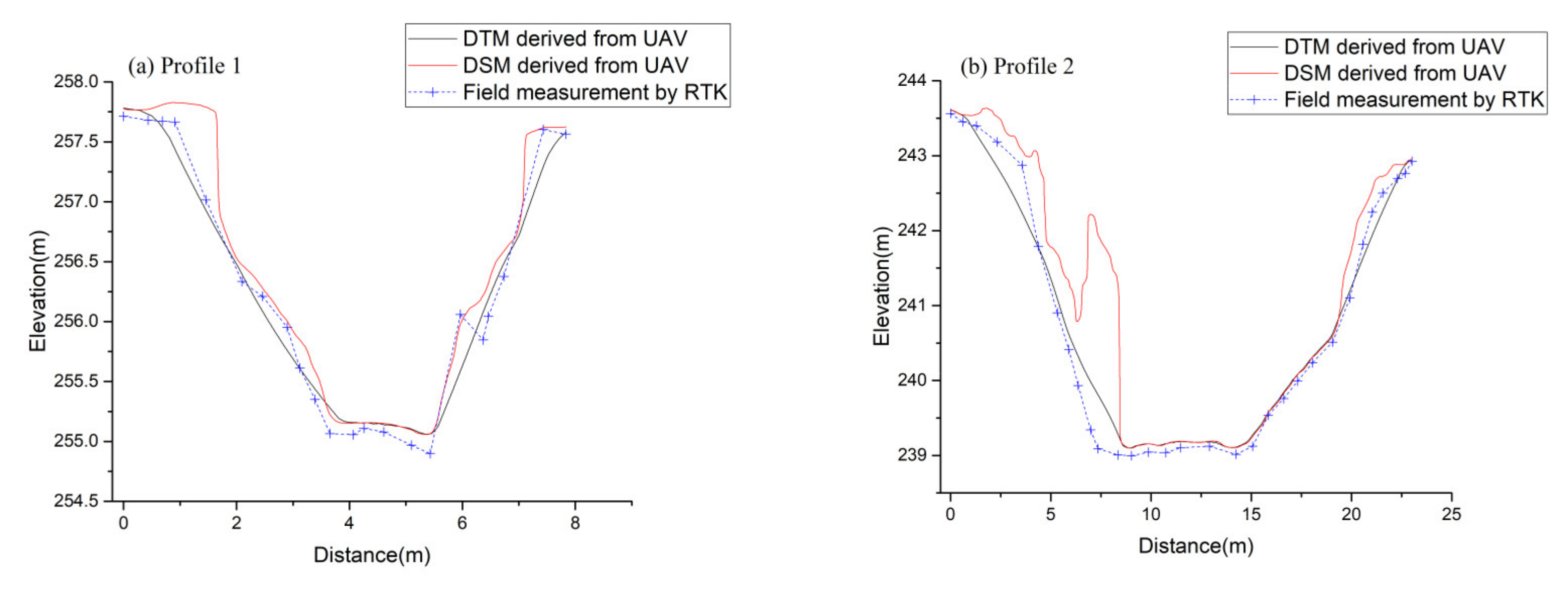
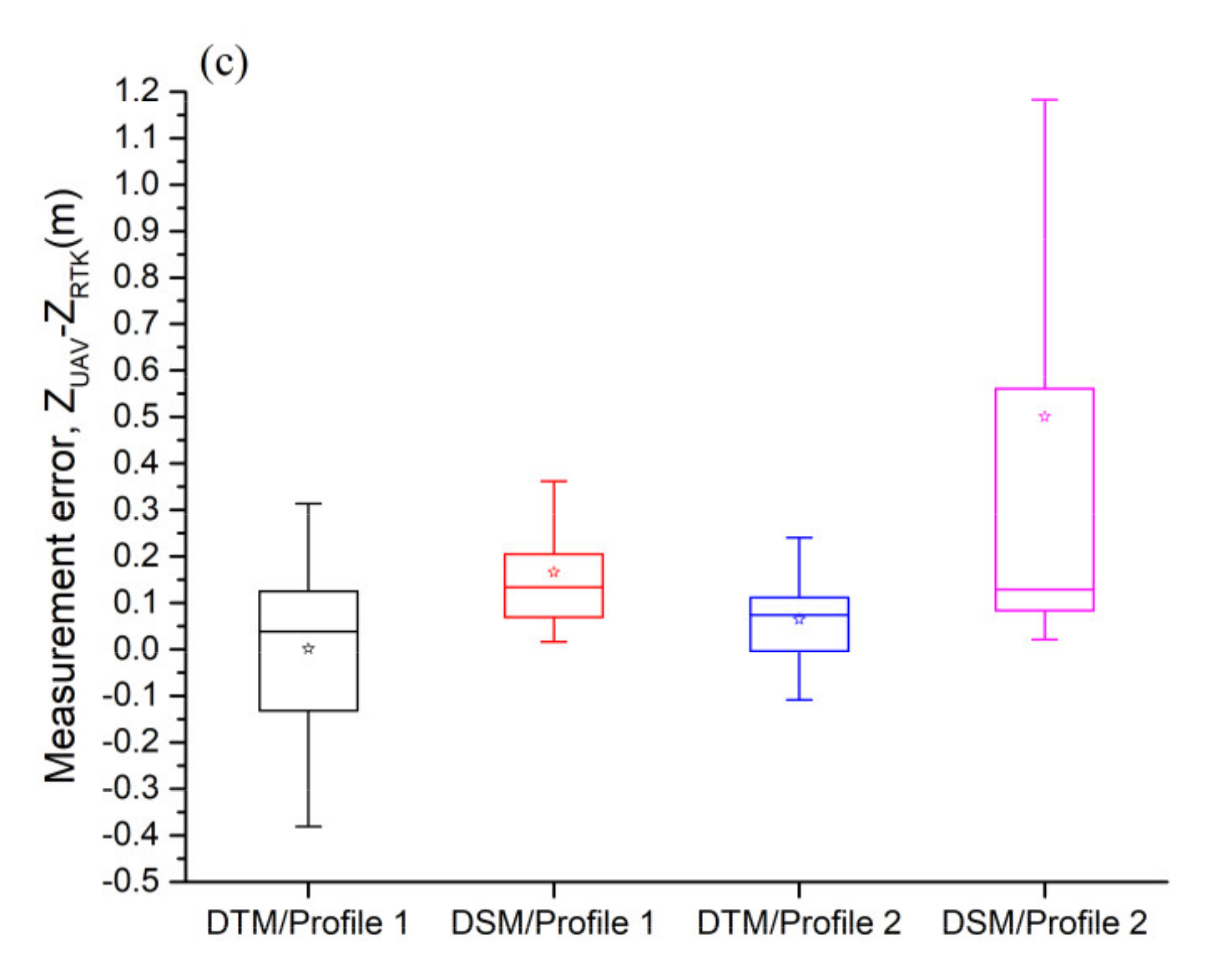
3.1. Accuracy Assessment
3.2. Geomorphological Changes
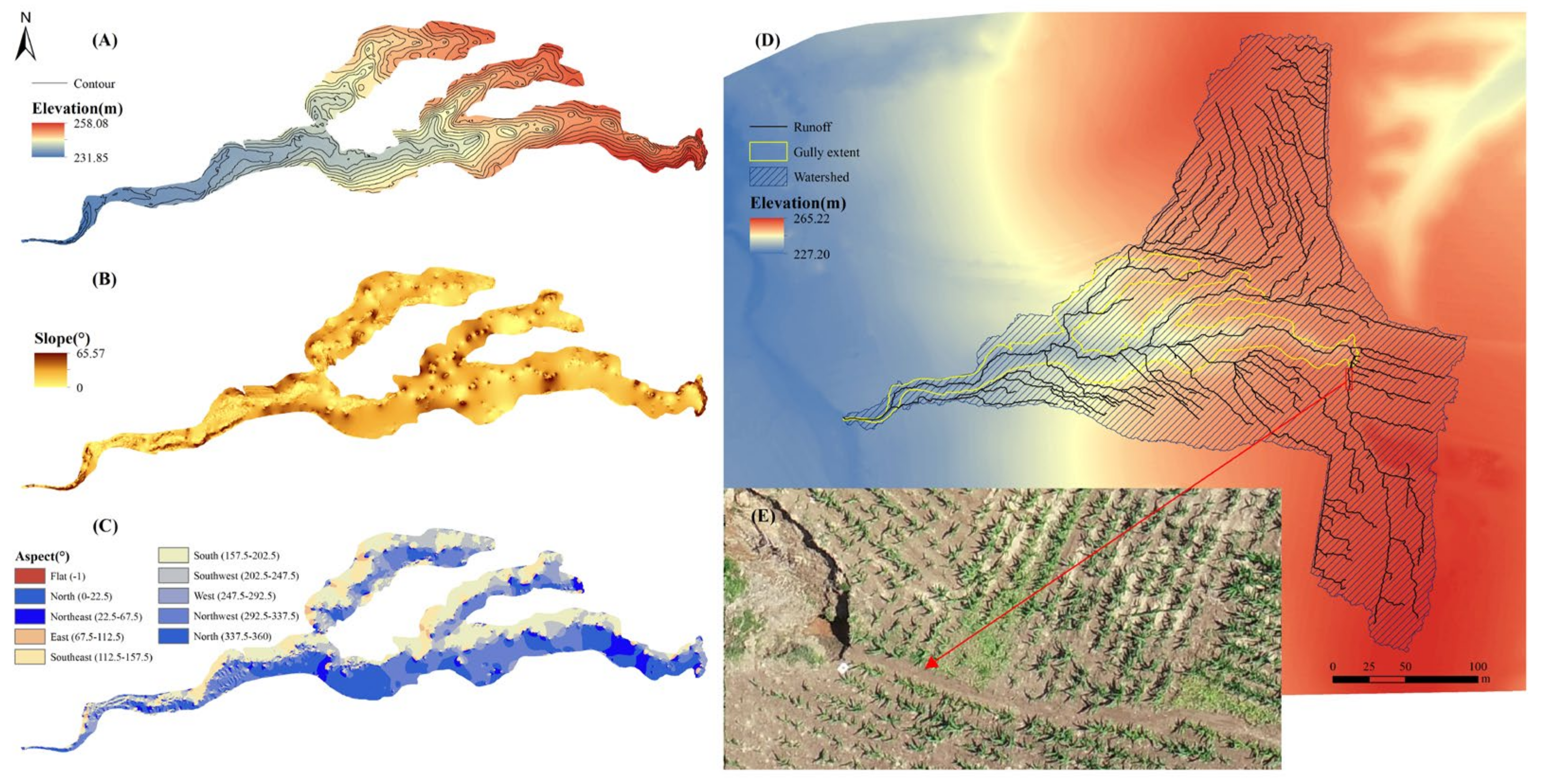
3.2.1. Extraction of Topographic Information
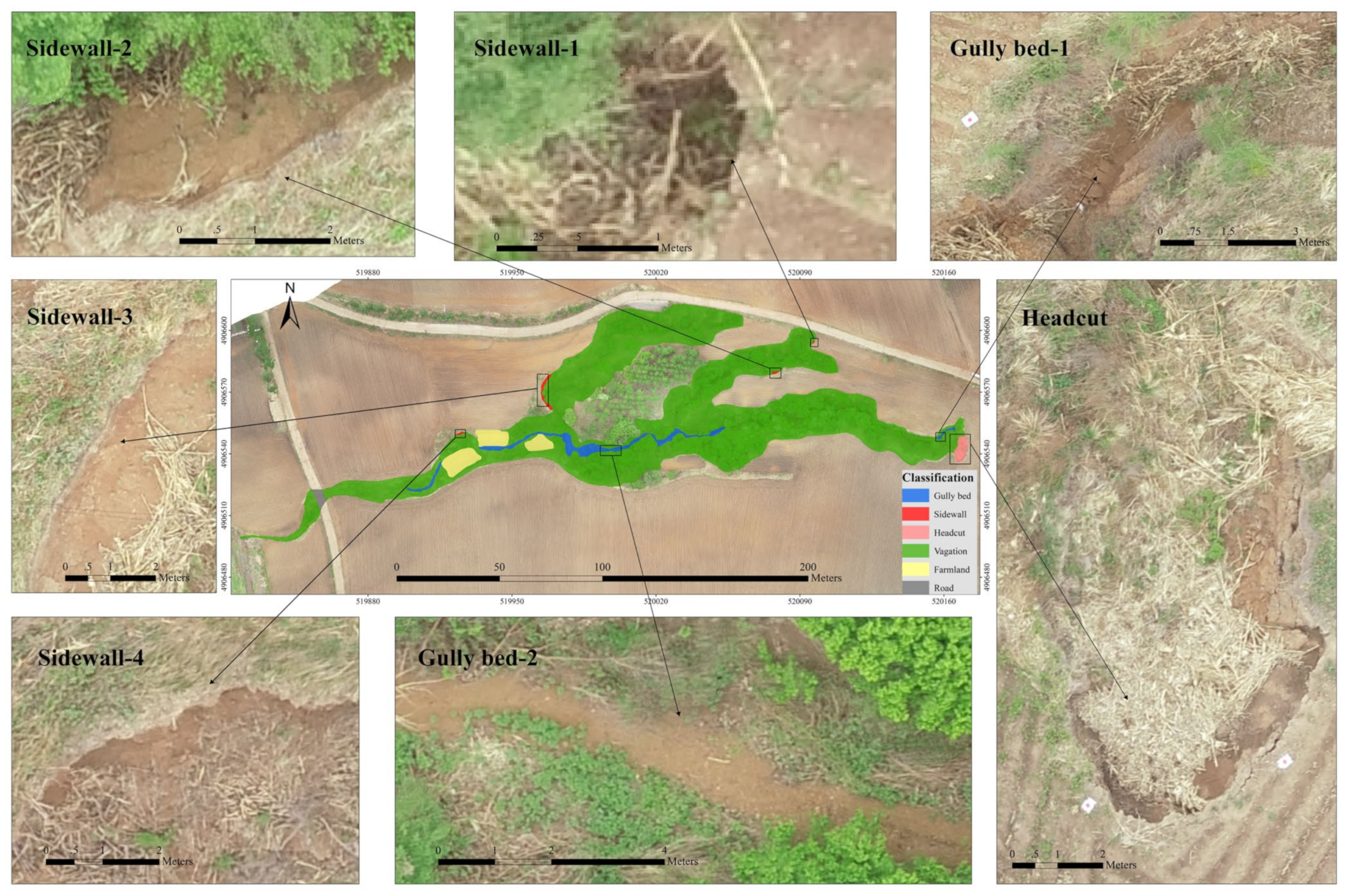
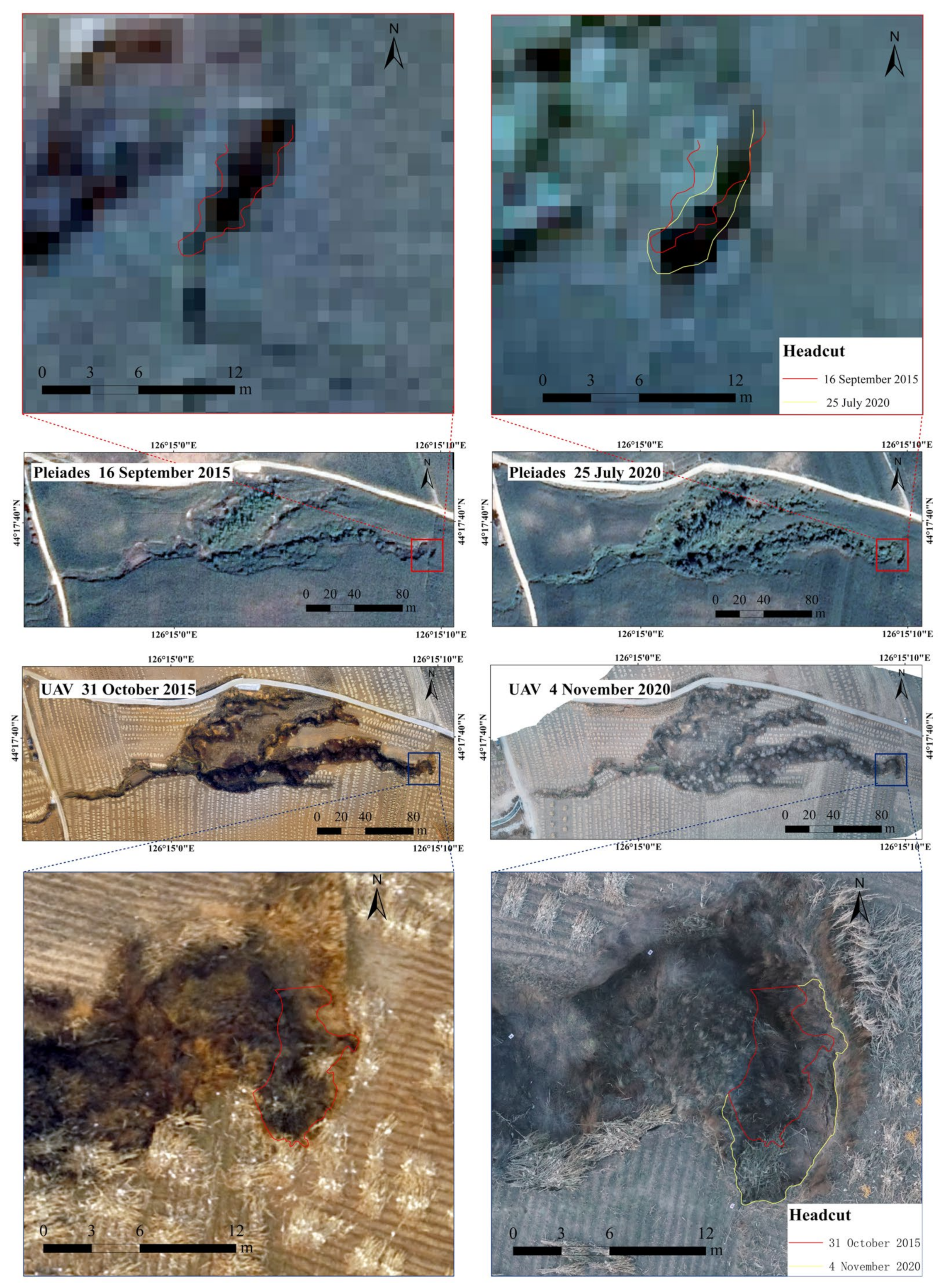
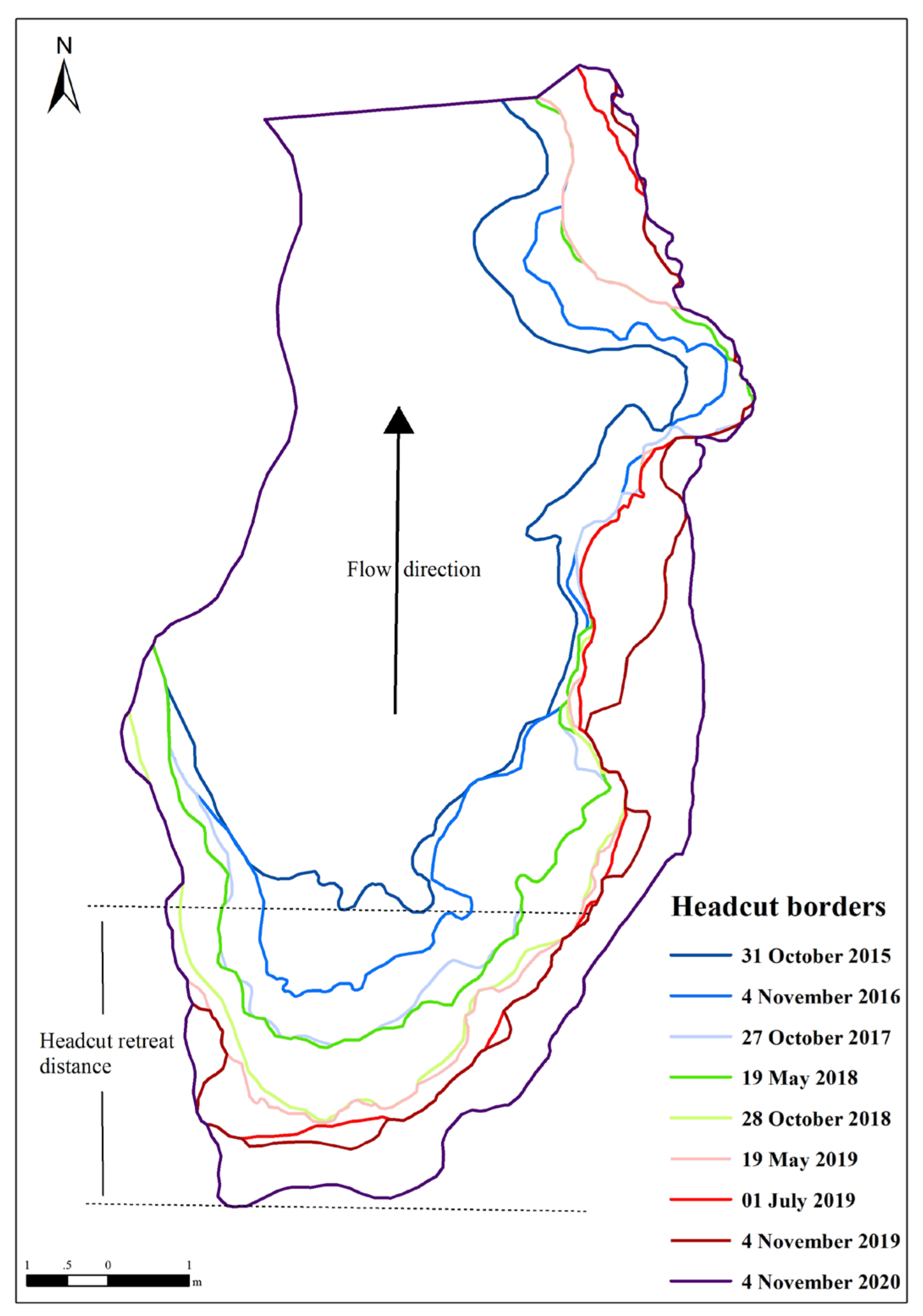
3.2.2. Morphological Changes of the Gully
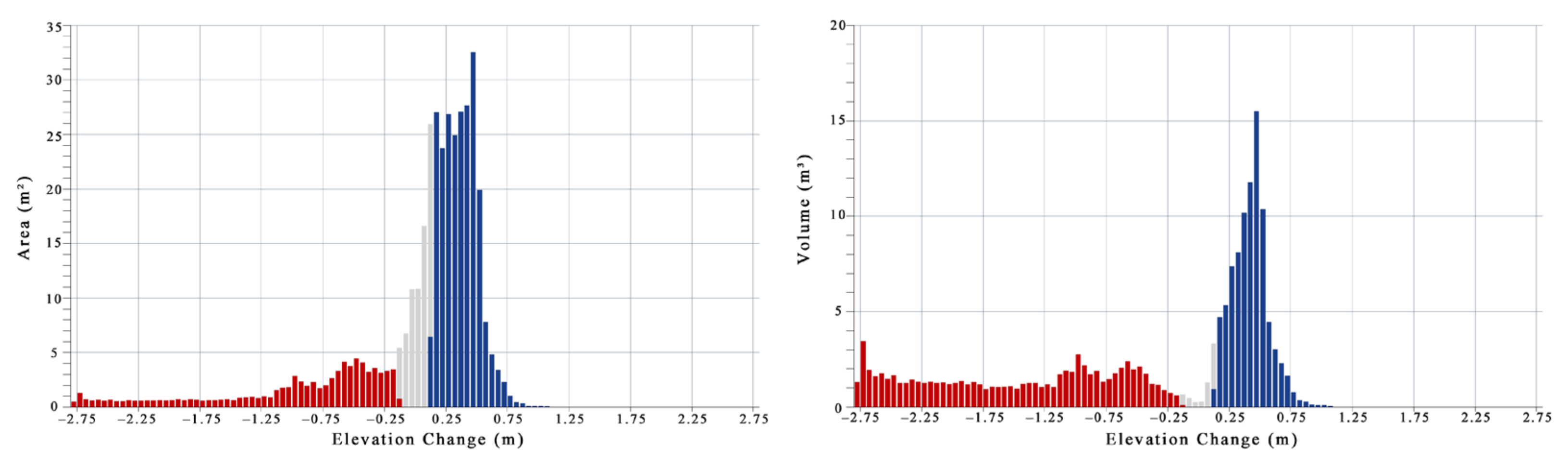
3.2.3. Volume Change
4. Discussion
4.1. Quality Evaluation of Multitemporal UAV-Based Monitoring
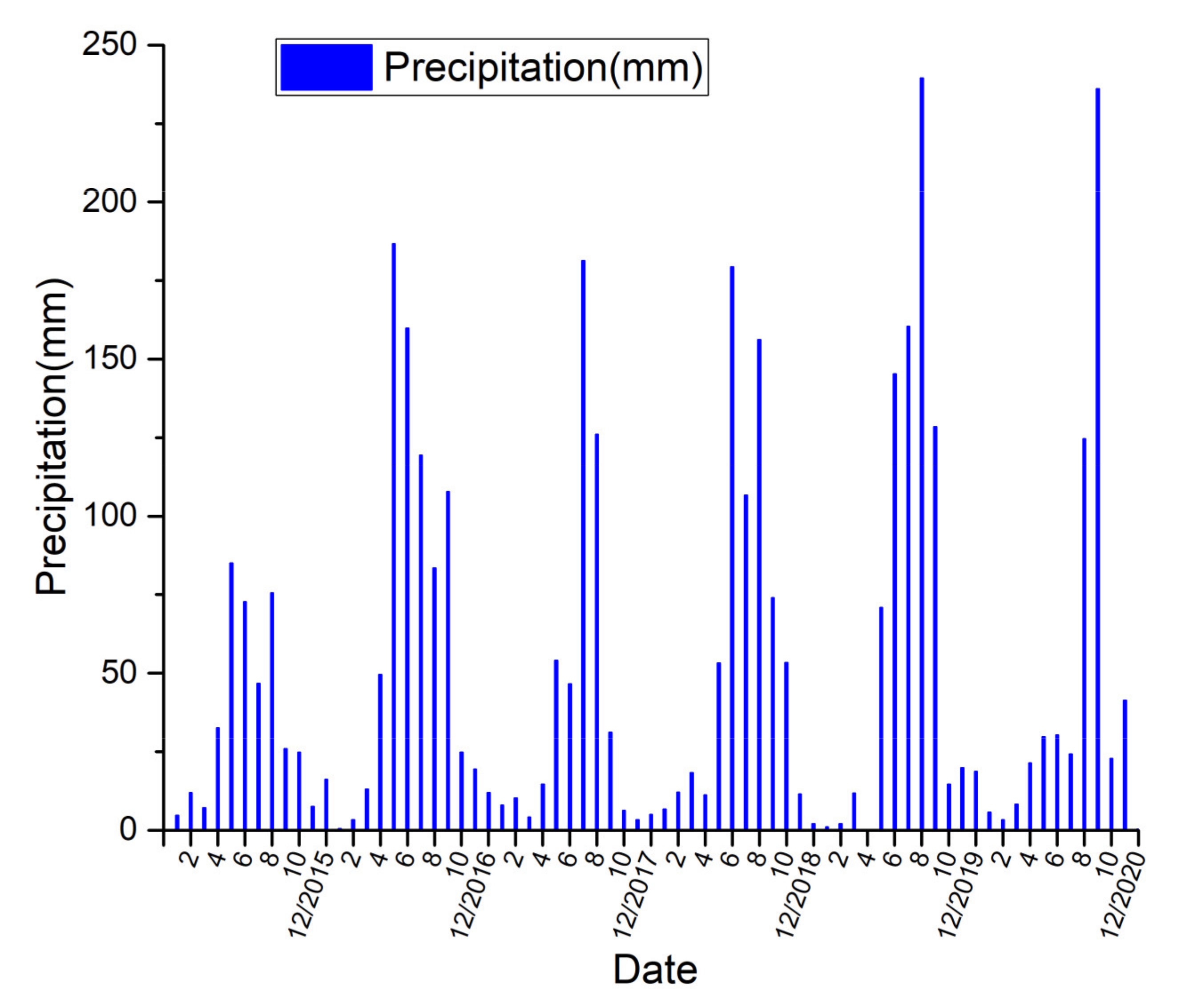
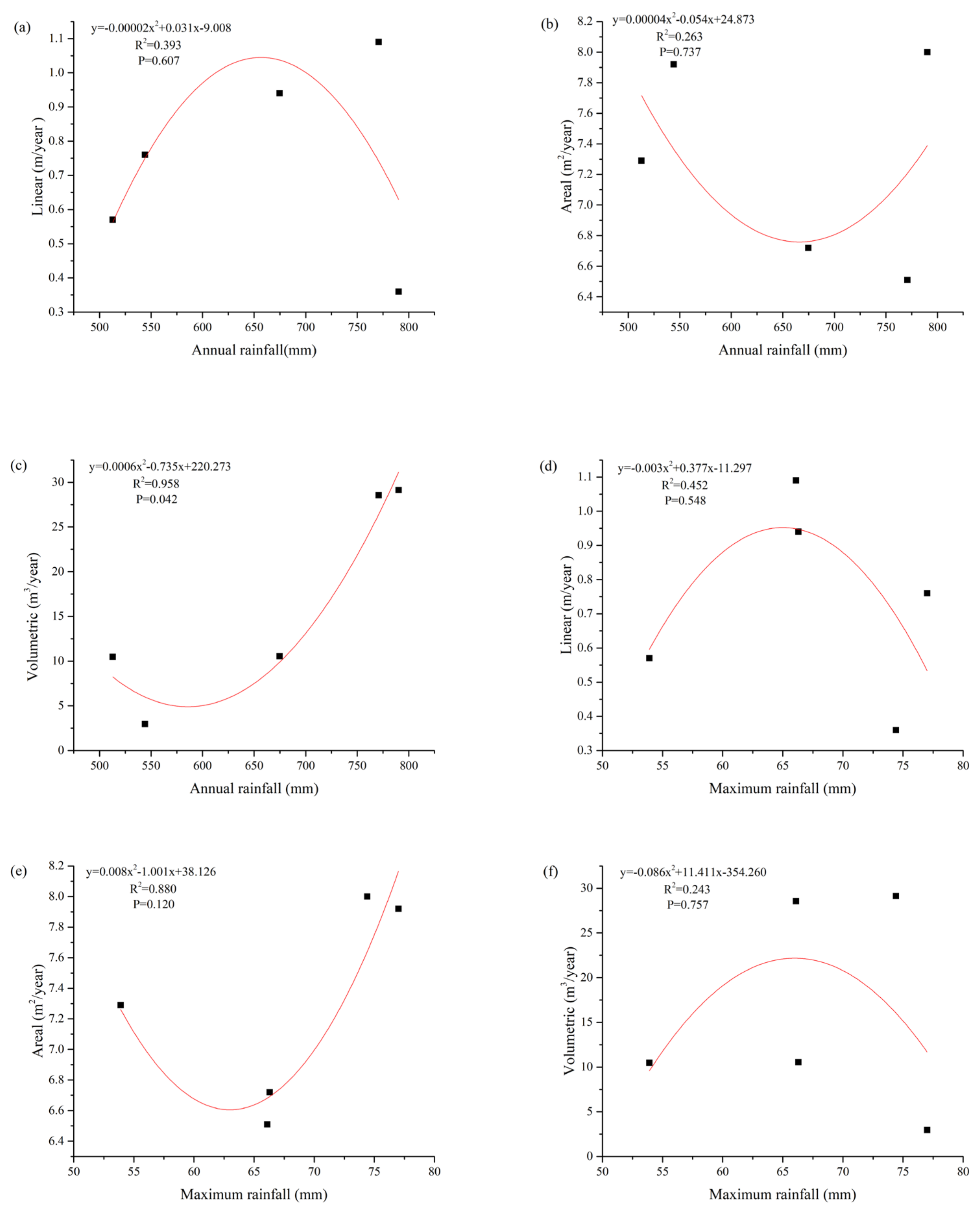
4.2. Headcut Retreat Rates and Environmental Factors
4.3. Seasonal Variations in Gully Erosion Induced by Various Forces
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hayas, A.; Poesen, J.; Vanwalleghem, T. Rainfall and vegetation effects on temporal variation of topographic thresholds for gully initiation in mediterranean cropland and olive groves. Land Degrad. Dev. 2017, 28, 2540–2552. [Google Scholar] [CrossRef]
- Verstraeten, G.; Poesen, J. The nature of small-scale flooding, muddy floods and retention pond sedimentation in central Belgium. Geomorphology 1999, 29, 275–292. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Ionita, I.; Fullen, M.A.; Zgłobicki, W.; Poesen, J. Gully erosion as a natural and human-induced hazard. Nat. Hazards 2015, 79, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Yan, B.; Bo, S.; Wang, Z.; Xin, W. Current status and comprehensive control strategies of soil erosion for cultivated land in the Northeastern black soil area of China. Sci. Soil Water Conserv. 2008, 6, 1–8. [Google Scholar] [CrossRef]
- Yang, J.C.; Zhang, S.W.; Chang, L.P.; Li, F.; Li, T.Q.; Gao, Y. Gully erosion regionalization of black soil area in northeastern China. Chinese Geogr. Sci. 2017, 27, 78–87. [Google Scholar] [CrossRef] [Green Version]
- Zheng, F.L.; Zhang, J.Q.; Liu, G.; Fan, H.M.; Wang, B.; Shen, H.O. Characteristics of soil erosion on sloping farmlands and key fields for studying compound soil erosion caused by multi-forces in Mollisol Region of Northeast China. Bull. Soil Water Conserv. 2019, 39, 314–319. [Google Scholar] [CrossRef]
- Pineux, N.; Lisein, J.; Swerts, G.; Bielders, C.L.; Lejeune, P.; Colinet, G.; Degré, A. Can DEM time series produced by UAV be used to quantify diffuse erosion in an agricultural watershed? Geomorphology 2017, 280, 122–136. [Google Scholar] [CrossRef]
- Castillo, C.; Gómez, J.A. A century of gully erosion research: Urgency, complexity and study approaches. Earth-Sci. Rev. 2016, 160, 300–319. [Google Scholar] [CrossRef]
- Vandekerckhove, L.; Poesen, J.; Wijdenes, D.O.; Gyssels, G. Short-term bank gully retreat rates in Mediterranean environments. Catena 2001, 44, 133–161. [Google Scholar] [CrossRef]
- Casali, J.; Loizu, J.; Campo, M.A.; de Santisteban, L.M.; Alvarez-Mozos, J. Accuracy of methods for field assessment of rill and ephemeral gully erosion. Catena 2006, 67, 128–138. [Google Scholar] [CrossRef]
- Castillo, C.; Perez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gomez, J.A. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef] [Green Version]
- Ionita, I. Gully development in the Moldavian Plateau of Romania. Catena 2006, 68, 133–140. [Google Scholar] [CrossRef]
- Wu, Y.Q.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.; Stiller, I.; Muir, J. Assessing the repeatability of terrestrial laser scanning for monitoring gully topography: A case study from Aratula, Queensland, Australia. Geomorphology 2016, 262, 24–36. [Google Scholar] [CrossRef]
- Wu, Y.; Zheng, Q.; Zhang, Y.; Liu, B.; Cheng, H.; Wang, Y. Development of gullies and sediment production in the black soil region of northeastern China. Geomorphology 2008, 101, 683–691. [Google Scholar] [CrossRef]
- Yan, Y.C.; Zhang, S.W.; Yue, S.P. Application of corona and spot imagery on erosion gully research in typical black soil regions of Northeast China. Resour. Sci. 2006, 27, 650–656. [Google Scholar]
- Xu, Q.; Kou, P.; Wang, C.; Yunus, A.P.; Xu, J.; Peng, S.; He, C. Evaluation of gully head retreat and fill rates based on high-resolution satellite images in the loess region of China. Environ. Earth Sci. 2019, 78, 465. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2015, 128, 262–277. [Google Scholar] [CrossRef]
- Daba, S.; Rieger, W.; Strauss, P. Assessment of gully erosion in eastern Ethiopia using photogrammetric techniques. Catena 2003, 50, 273–291. [Google Scholar] [CrossRef]
- Martinez-Casasnovas, J.A. A spatial information technology approach for the mapping and quantification of gully erosion. Catena 2003, 50, 293–308. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Zhang, S.; Pu, L.; Yang, J.; Yang, C.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B. Gully erosion mapping and monitoring at multiple scales based on multi-source remote sensing data of the Sancha River Catchment, Northeast China. ISPRS Int. J. Geo-Inf. 2016, 5, 200. [Google Scholar] [CrossRef] [Green Version]
- Ries, J.B.; Marzolff, I. Monitoring of gully erosion in the Central Ebro Basin by large-scale aerial photography taken from a remotely controlled blimp. Catena 2003, 50, 309–328. [Google Scholar] [CrossRef]
- Marzolff, I.; Poesen, J. The potential of 3D gully monitoring with GIS using high-resolution aerial photography and a digital photogrammetry system. Geomorphology 2009, 111, 48–60. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Gong, C.; Lei, S.; Bian, Z.; Liu, Y.; Zhang, Z.; Cheng, W. Analysis of the development of an erosion gully in an open-pit coal mine dump during a winter freeze-thaw cycle by using low-cost UAVs. Remote Sens. 2019, 11, 1356. [Google Scholar] [CrossRef] [Green Version]
- Kou, P.; Xu, Q.; Yunus, A.P.; Ju, Y.; Guo, C.; Wang, C.; Zhao, K. Multi-temporal UAV data for assessing rapid rill erosion in typical gully heads on the largest tableland of the Loess Plateau, China. Bull. Eng. Geol. Environ. 2019, 79, 1861–1877. [Google Scholar] [CrossRef]
- Stocker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.G.; Faust, D. Multi-temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Proc. Land 2015, 40, 741–755. [Google Scholar] [CrossRef]
- Kaiser, A.; Neugirg, F.; Rock, G.; Muller, C.; Haas, F.; Ries, J.; Schmidt, J. Small-scale surface reconstruction and volume calculation of soil erosion in complex Moroccan gully morphology using structure from motion. Remote Sens. 2014, 6, 7050–7080. [Google Scholar] [CrossRef] [Green Version]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef] [Green Version]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Dong, Y.; Wu, Y.; Qin, W.; Guo, Q.; Yin, Z.; Duan, X. The gully erosion rates in the black soil region of northeastern China: Induced by different processes and indicated by different indexes. Catena 2019, 182, 104146. [Google Scholar] [CrossRef]
- Wen, Y.; Kasielke, T.; Li, H.; Zepp, H.; Zhang, B. A case-study on history and rates of gully erosion in Northeast China. Land Degrad. Dev. 2021, 32, 4254–4266. [Google Scholar] [CrossRef]
- Hu, G.; Wu, Y.; Liu, B.; Yu, Z.; You, Z.; Zhang, Y. Short-term gully retreat rates over rolling hill areas in black soil of Northeast China. Catena 2007, 71, 321–329. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, X.; Xiao, Z.; Qu, F.; Wang, X.; Li, Y.; Aurangzeib, M.; Zhang, X.; Liu, X. Quantitative studies of gully slope erosion and soil physiochemical properties during freeze-thaw cycling in a Mollisol region. Sci. Total Environ. 2020, 707, 136191. [Google Scholar] [CrossRef]
- Huang, D.; Su, L.; Zhou, L.; Fan, H. Gully is the dominant sediment source of snowmelt erosion in the black soil region—A case study. Soil Tillage Res. 2022, 215, 105232. [Google Scholar] [CrossRef]
- Xu, J.; Li, H.; Liu, X.; Hu, W.; Yang, Q.; Hao, Y.; Zhen, H.; Zhang, X. Gully erosion induced by snowmelt in Northeast China: A case Study. Sustainability 2019, 11, 2088. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.-J.; Wang, L.; Zhang, F. New explanations for gully formation on farmlands in China’s Mollisols region: Fissure evidence by spring freeze-thaw actions. J. Soil Water Conserv. 2021, 76, 89A. [Google Scholar] [CrossRef]
- Xu, X.; Zheng, F.; Wilson, G.V.; He, C.; Lu, J.; Bian, F. Comparison of runoff and soil loss in different tillage systems in the Mollisol region of Northeast China. Soil Tillage Res. 2018, 177, 1–11. [Google Scholar] [CrossRef]
- Frankl, A.; Nyssen, J.; de Dapper, M.; Haile, M.; Billi, P.; Munro, R.N.; Deckers, J.; Poesen, J. Linking long-term gully and river channel dynamics to environmental change using repeat photography (Northern Ethiopia). Geomorphology 2011, 129, 238–251. [Google Scholar] [CrossRef]
- Frankl, A.; Poesen, J.; Haile, M.; Deckers, J.; Nyssen, J. Quantifying long-term changes in gully networks and volumes in dryland environments: The case of Northern Ethiopia. Geomorphology 2013, 201, 254–263. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellan, A. Image-based surface reconstruction in geomorphometry—Merits, limits and developments of a promising tool for geoscientists. Image 2015, 3, 1445–1508. [Google Scholar]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 32, 1362–1376. [Google Scholar] [CrossRef] [PubMed]
- Becker, C.; Häni, N.; Rosinskaya, E.; d’Angelo, E.; Strecha, C. Classification of aerial photogrammetric 3D point clouds. arXiv 2017, arXiv:1705.08374. [Google Scholar]
- Yang, S.; Guan, Y.; Zhao, C.; Zhang, C.; Bai, J.; Chen, K. Determining the influence of catchment area on intensity of gully erosion using high-resolution aerial imagery: A 40-year case study from the Loess Plateau, northern China. Geoderma 2019, 347, 90–102. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Processes Landf. J. Br. Geomorphol. Res. Group 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Bezak, N.; Grigillo, D.; Urbančič, T.; Mikoš, M.; Petrovič, D.; Rusjan, S. Geomorphic response detection and quantification in a steep forested torrent. Geomorphology 2017, 291, 33–44. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Schnabel, S.; Berenguer-Sempere, F.; Lavado-Contador, F.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.T.; McVey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Proc. Land 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Vericat, D.; Smith, M.; Brasington, J. Patterns of topographic change in sub-humid badlands determined by high resolution multi-temporal topographic surveys. Catena 2014, 120, 164–176. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Proc. Land 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Moeyersons, J.; Makanzu Imwangana, F.; Dewitte, O. Site- and rainfall-specific runoff coefficients and critical rainfall for mega-gully development in Kinshasa (DR Congo). Nat. Hazards 2015, 79, 203–233. [Google Scholar] [CrossRef]
- Rossi, M.; Torri, D.; Santi, E. Bias in topographic thresholds for gully heads. Nat. Hazards 2015, 79, 51–69. [Google Scholar] [CrossRef]
- Vanmaercke, M.; Poesen, J.; van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A.; et al. How fast do gully headcuts retreat? Earth-Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Nachtergaele, J.; Poesen, J.; Sidorchuk, A.; Torri, D. Prediction of concentrated flow width in ephemeral gully channels. Hydrol. Process. 2002, 16, 1935–1953. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Proc. Land 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Anders, N.; Smith, M.; Suomalainen, J.; Cammeraat, E.; Valente, J.; Keesstra, S. Impact of flight altitude and cover orientation on Digital Surface Model (DSM) accuracy for flood damage assessment in Murcia (Spain) using a fixed-wing UAV. Earth Sci. Inform. 2020, 13, 391–404. [Google Scholar] [CrossRef] [Green Version]
- Rock, G.; Ries, J.; Udelhoven, T. Sensitivity Analysis of UAV-Photogrammetry for Creating Digital Elevation Models (DEM). In Proceedings of the Conference on Unmanned Aerial Vehicle in Geomatics, Zurich, Switzerland, 14–16 September 2011; pp. 69–73. [Google Scholar]
- Fan, H.; Gu, G.; Wang, Y.; Zhong, Y. Characteristics of eroded gully development and environment of black soil region in Northeast China. Soil Water Conserv. China 2013, 379, 75–79. [Google Scholar] [CrossRef]
- Gu, G.; Wang, Y.; Zhong, Y.; Liu, J.; Fan, H.; Liu, L. Development characteristics of gullies in rolling hilly regions in Northeast of China. Res. Soil Water Conserv. 2015, 22, 47. [Google Scholar]
- Hu, G.; Wu, Y.Q.; Liu, B.Y.; Zhang, Y.G.; You, Z.M.; Yu, Z.T. The characteristics of gully erosion over rolling hilly black soil areas of Northeast China. J. Geogr. Sci. 2009, 19, 309–320. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft | Phantom 3 Professional | Phantom 4 RTK |
|---|---|---|
| Weight | 1280 g | 1391 g |
| Maximum flight speed | 16 m/s (ATTI mode) | 50 km/h (P-mode) 58 km/h (A-mode) |
| Flight time | ~23 min/sortie | ~30 min/sortie |
| Camera sensor | 1/2.3 inch CMOS with effective Pixel of 12.4 MP | 1 inch CMOS with effective pixels of 20 MP |
| Camera lens | FOV 94° 20 mm (35 mm format equivalent) f/2.8 auto focus at ∞ | FOV 84° 8.8 mm/24 mm (35 mm format equivalent) f/2.8–f/11 auto focus at 1 m–∞ |
| GNSS | Single-frequency GNSS module: GPS/GLONASS | (1) Single-frequency GNSS module: GPS + BeiDou + Galileo (2) Multi-frequency, multi-system, high-precision RTK-GNSS |
| UAV | 31 October 2015 | 4 November 2016 | 27 October 2017 | 19 May 2018 | 28 October 2018 | 19 May 2019 | 1 July 2019 | 4 November 2019 | 4 November 2020 |
|---|---|---|---|---|---|---|---|---|---|
| Drone | P3P | P3P | P3P | P3P | P3P | P4R | P4R | P4R | P4R |
| Flight height (m) | 40 | 50 | 50 | 50 | 25 | 50 | 80 | 70 | 40 |
| No. images calibrated | 223 | 509 | 193 | 333 | 754 | 280 | 142 | 203 | 462 |
| GSD (cm) | 1.74 | 2.21 | 2.52 | 2.7 | 1.51 | 1.72 | 2.61 | 2.05 | 1.21 |
| MRE (pixels) | 0.279 | 0.147841 | 0.209 | 0.274 | 0.217 | 0.138 | 0.149 | 0.188 | 0.195 |
| Camera optimization | 7.33% | 4.48% | 0.43% | 4.98% | 3.90% | 0.45% | 0.61% | 0% | 0.58% |
| No. of GCPs | 5 | 8 | 25 | 12 | 14 | 20 | 17 | 10 | 15 |
| RMSE/X (cm) | 3.94 | 4.39 | 3.56 | 2.89 | 3.80 | 0.92 | 0.96 | 2.26 | 1.21 |
| RMSE/Y (cm) | 7.50 | 3.28 | 2.66 | 3.65 | 3.05 | 1.30 | 0.90 | 2.03 | 0.79 |
| RMSE/Z (cm) | 6.65 | 3.81 | 4.57 | 2.42 | 1.96 | 2.27 | 2.07 | 2.02 | 1.37 |
| Total RMSE (cm) | 6.03 | 3.83 | 3.60 | 2.99 | 2.94 | 1.50 | 1.31 | 2.10 | 1.10 |
| Accuracy | DTM | DSM | ||||
|---|---|---|---|---|---|---|
| All | Profile 1 | Profile 2 | All | Profile 1 | Profile 2 | |
| RMSE (m) | 0.23 | 0.17 | 0.27 | 0.72 | 0.23 | 0.92 |
| Monitoring Period | Rainfall | Upstream Area of the Headcut | Annual Gully Headcut Retreat Rate | ||||
|---|---|---|---|---|---|---|---|
| Annual Rainfall (mm) | Maximum Rainfall (mm) | Initial (m2) | Final (m2) | Linear (m/year) | Areal (m2/year) | Volumetric (m3/year) | |
| 31 October 2015–4 November 2020 | 719.3 | 77 | 9735.27 | 9698.83 | 0.74 | 7.29 | 9.66 |
| 31 October 2015–4 November 2016 | 770.9 | 66.1 | 9735.27 | 9728.76 | 1.09 | 6.51 | 28.55 |
| 4 November 2016–27 October 2017 | 512.9 | 53.9 | 9728.76 | 9721.47 | 0.57 | 7.29 | 10.48 |
| 27 October 2017–28 October 2018 | 674.7 | 66.3 | 9721.47 | 9714.75 | 0.94 | 6.72 | 10.55 |
| 28 October 2018–4 November 2019 | 790.2 | 74.4 | 9714.75 | 9706.75 | 0.36 | 8.00 | 29.13 |
| 4 November 2019–4 November 2020 | 544.1 | 77 | 9706.75 | 9698.83 | 0.76 | 7.92 | 2.97 |
| Monitoring Period | Precipitation (mm) During the Monitoring Period | Gully Headcut Retreat | |||
|---|---|---|---|---|---|
| Linear (m) | Areal (m2) | Volumetric (m3) | |||
| Winter–spring | 27 October 2017–19 May 2018 | 58.3 | 0.05 | 0.93 | +7.18 |
| Rainy season | 19 May 2018–28 October 2018 | 616.4 | 0.90 | 5.79 | 10.49 |
| Winter–spring | 28 October 2018–19 May 2019 | 44.2 | 0.03 | 0.89 | 0.86 |
| Rainy season | 19 May 2019–4 November 2019 | 746.0 | 0.33 | 7.11 | 20.40 |
| 19 May–1 July | 210.0 | 0.24 | 3.92 | 2.39 | |
| 1 July–4 November | 536.0 | 0.09 | 3.20 | 18.03 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Sun, H.; Yang, J.; Zhang, S.; Fu, H.; Wang, N.; Liu, Q. Quantitative Evaluation of Gully Erosion Using Multitemporal UAV Data in the Southern Black Soil Region of Northeast China: A Case Study. Remote Sens. 2022, 14, 1479. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061479
Wang R, Sun H, Yang J, Zhang S, Fu H, Wang N, Liu Q. Quantitative Evaluation of Gully Erosion Using Multitemporal UAV Data in the Southern Black Soil Region of Northeast China: A Case Study. Remote Sensing. 2022; 14(6):1479. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061479
Chicago/Turabian StyleWang, Ranghu, Huan Sun, Jiuchun Yang, Shuwen Zhang, Hanpei Fu, Nan Wang, and Qianyu Liu. 2022. "Quantitative Evaluation of Gully Erosion Using Multitemporal UAV Data in the Southern Black Soil Region of Northeast China: A Case Study" Remote Sensing 14, no. 6: 1479. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14061479