

Inversion of Glacier 3D Displacement from Sentinel-1 and Landsat 8 Images Based on Variance Component Estimation: A Case Study in Shishapangma Peak, Tibet, China
Abstract
:1. Introduction
2. Experimental Area and Data
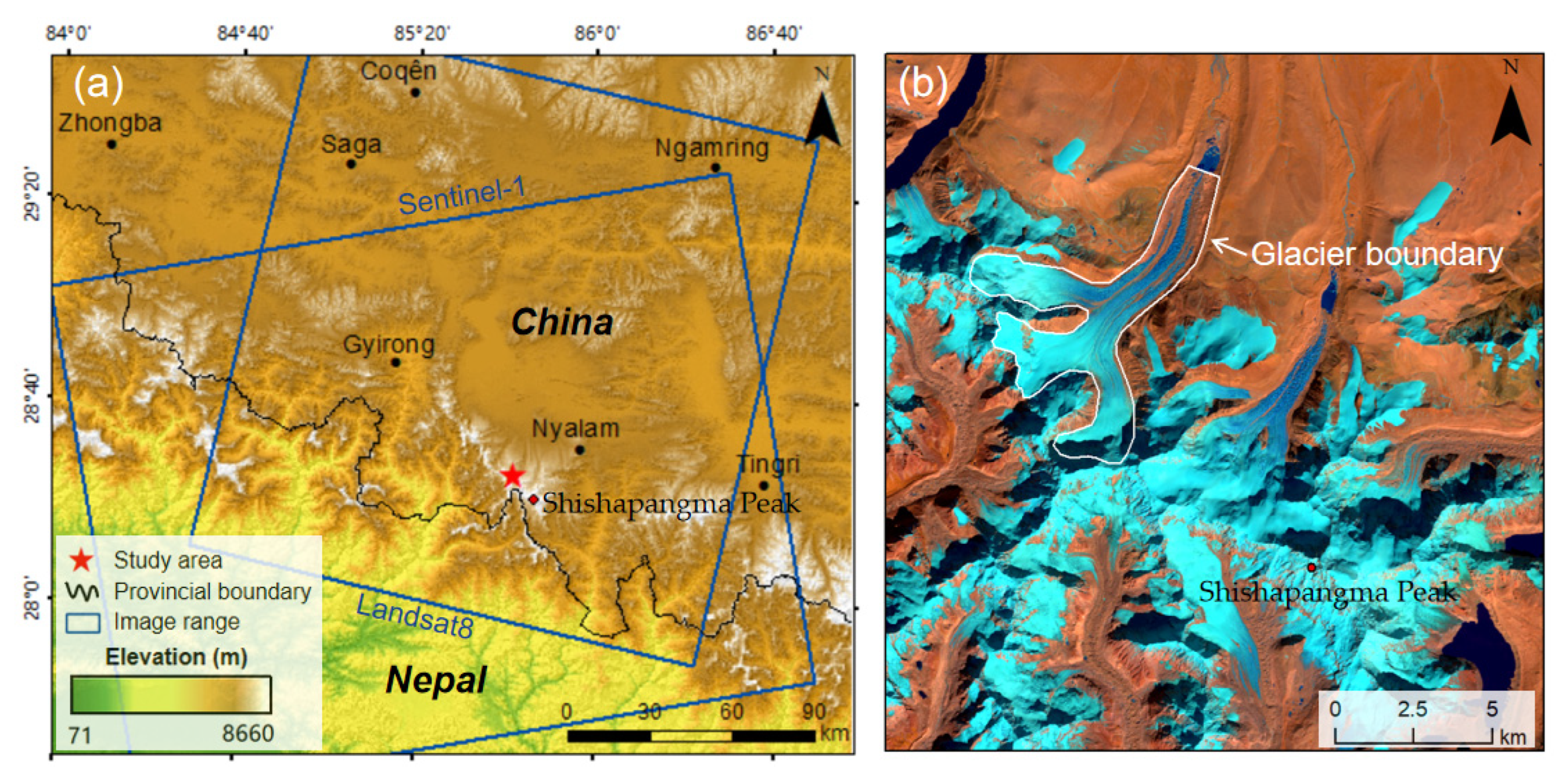
2.1. Experimental Area
2.2. Study Data
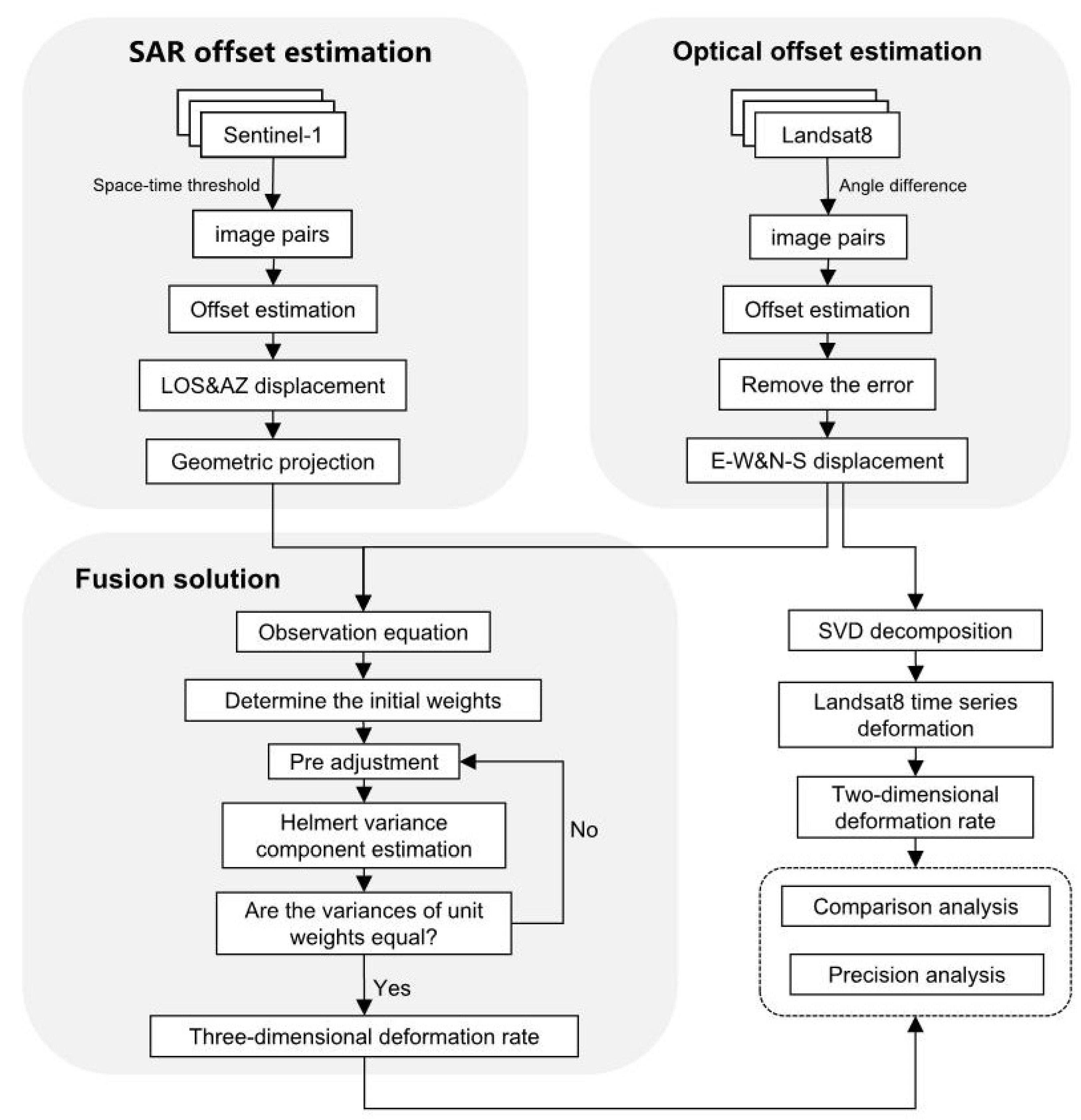
3. Methods and Data Processing
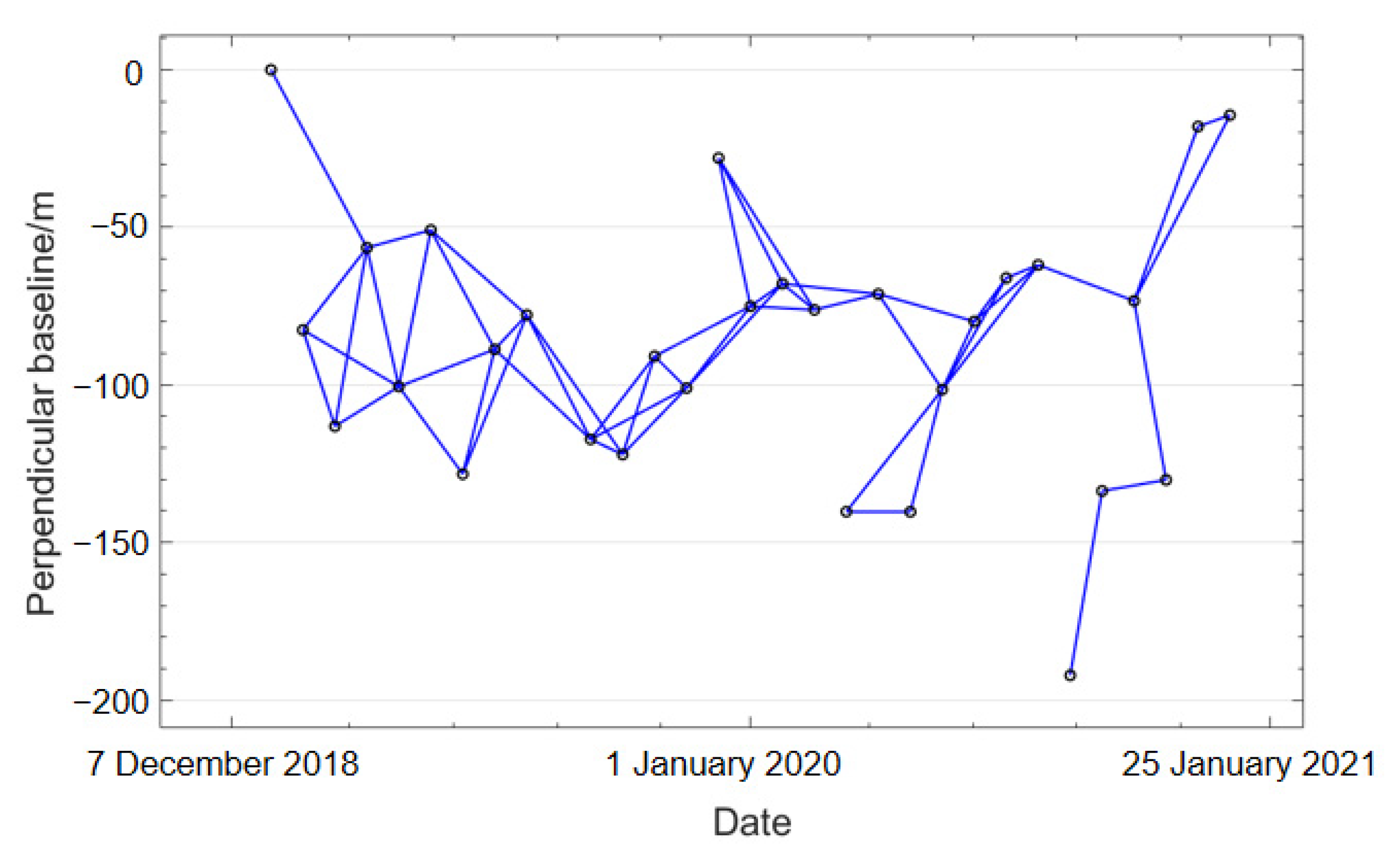
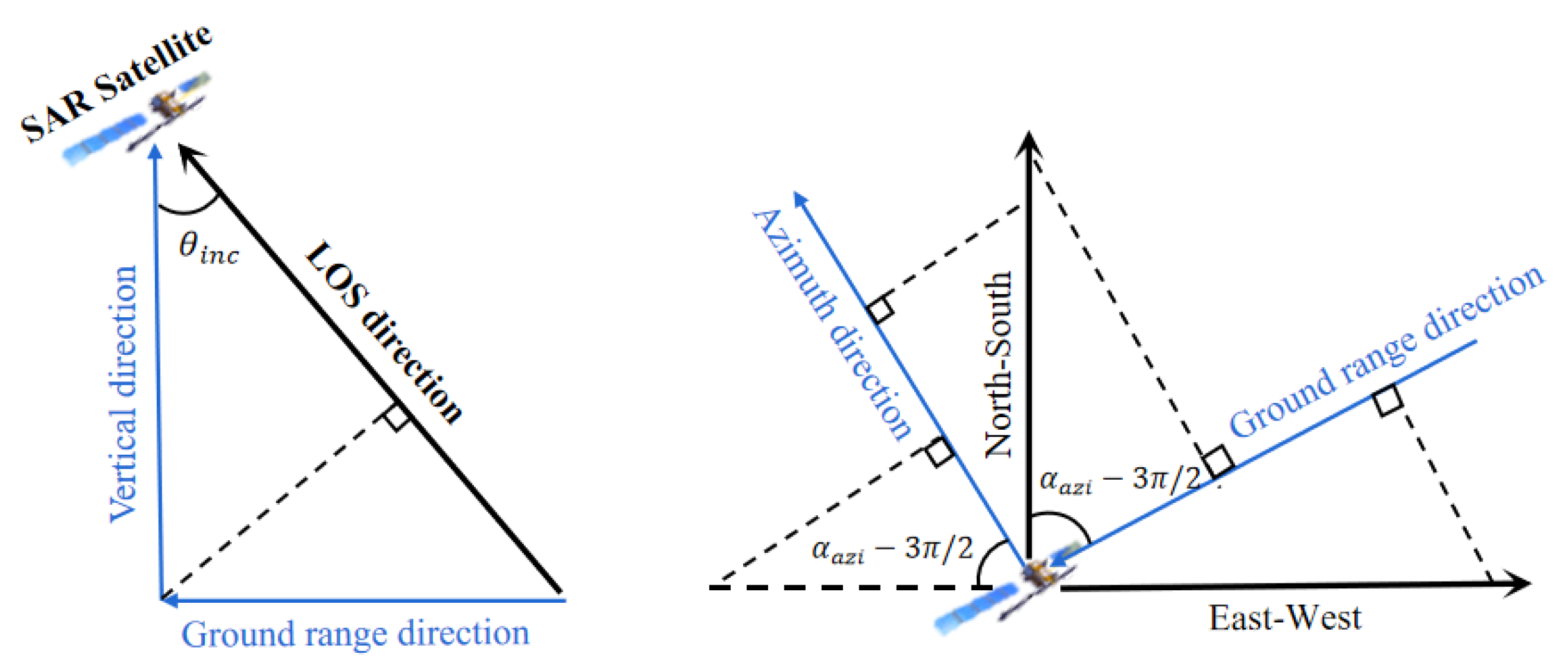
3.1. SAR Offset Estimation
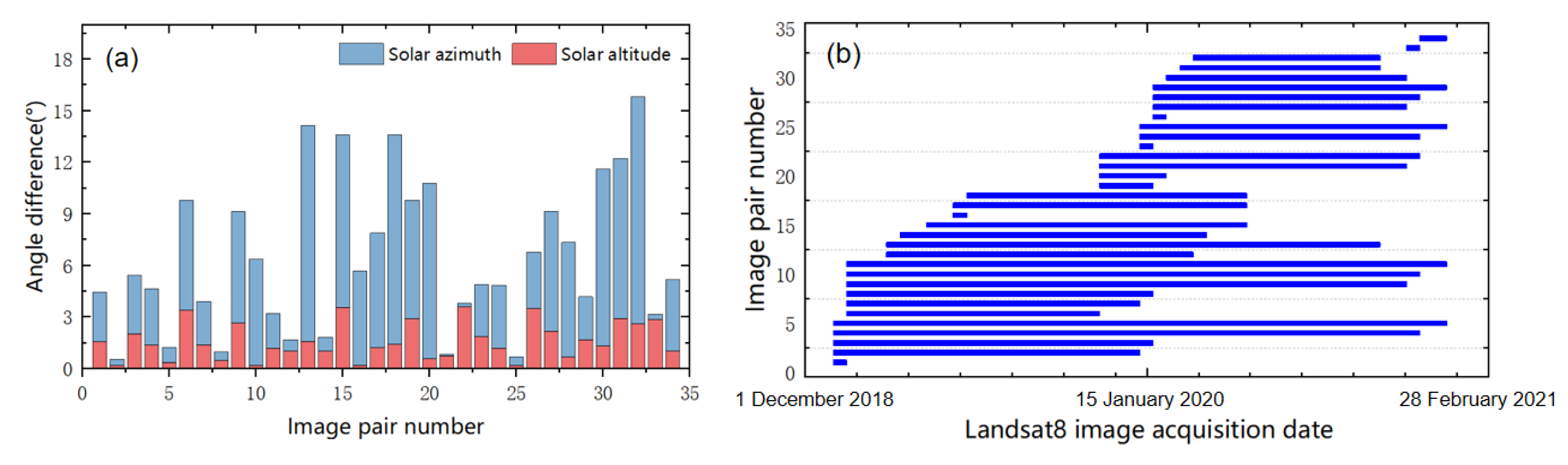
3.2. Optical Offset Estimation
3.3. Fusion Solution Based on Variance Component Estimation
4. Results and Analysis
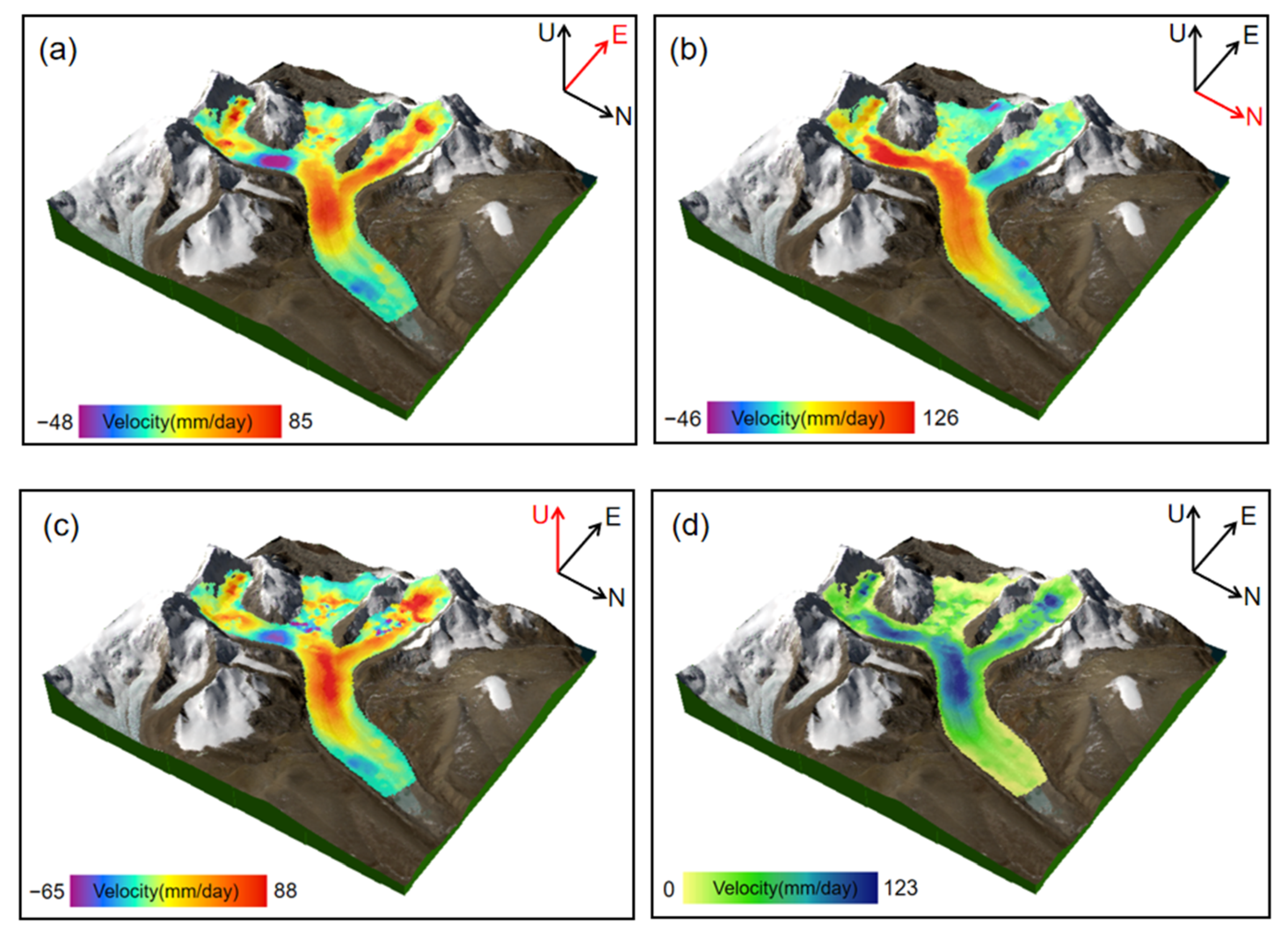
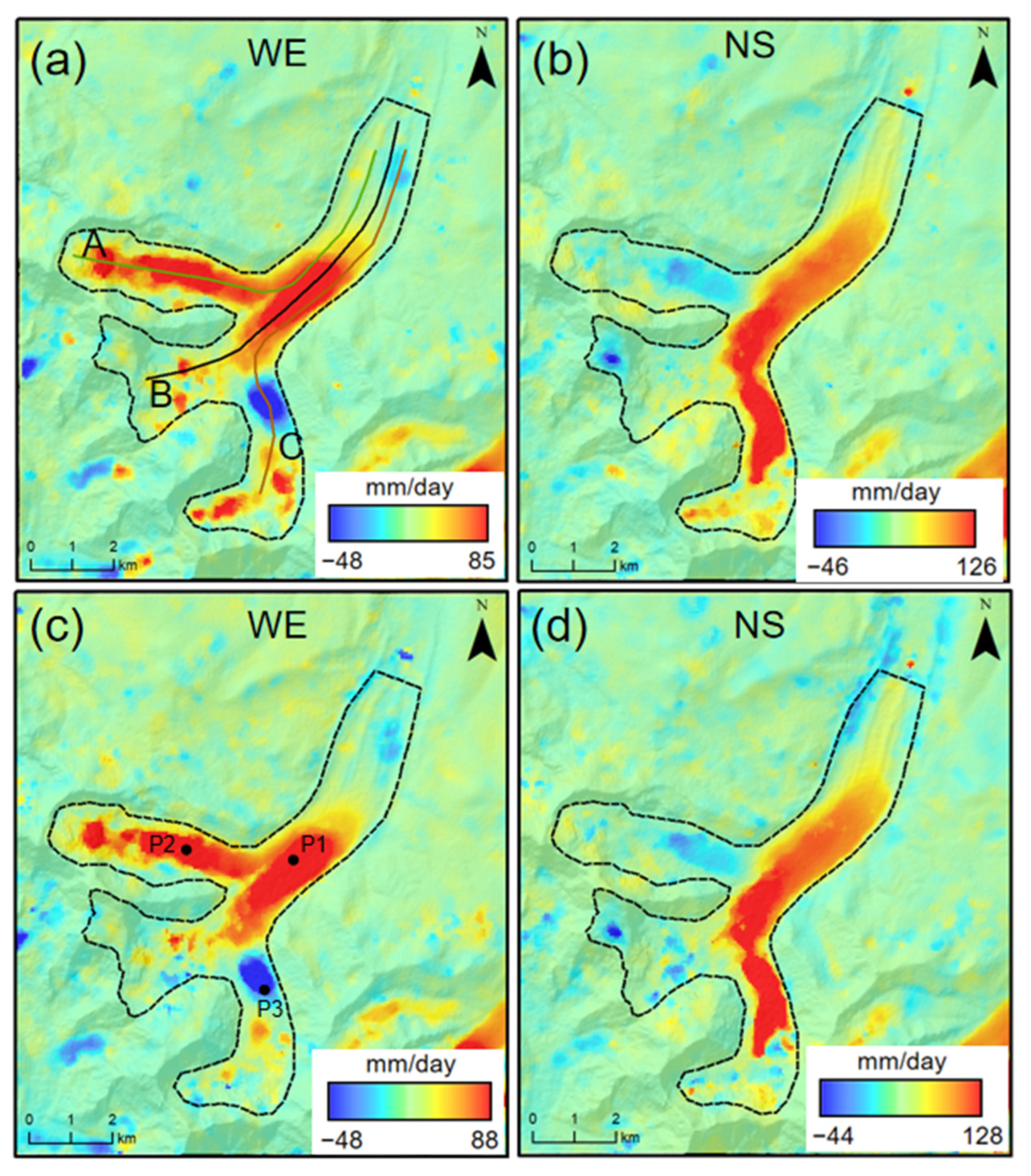
4.1. Glacier Displacement Results with SAR and Optical Offset
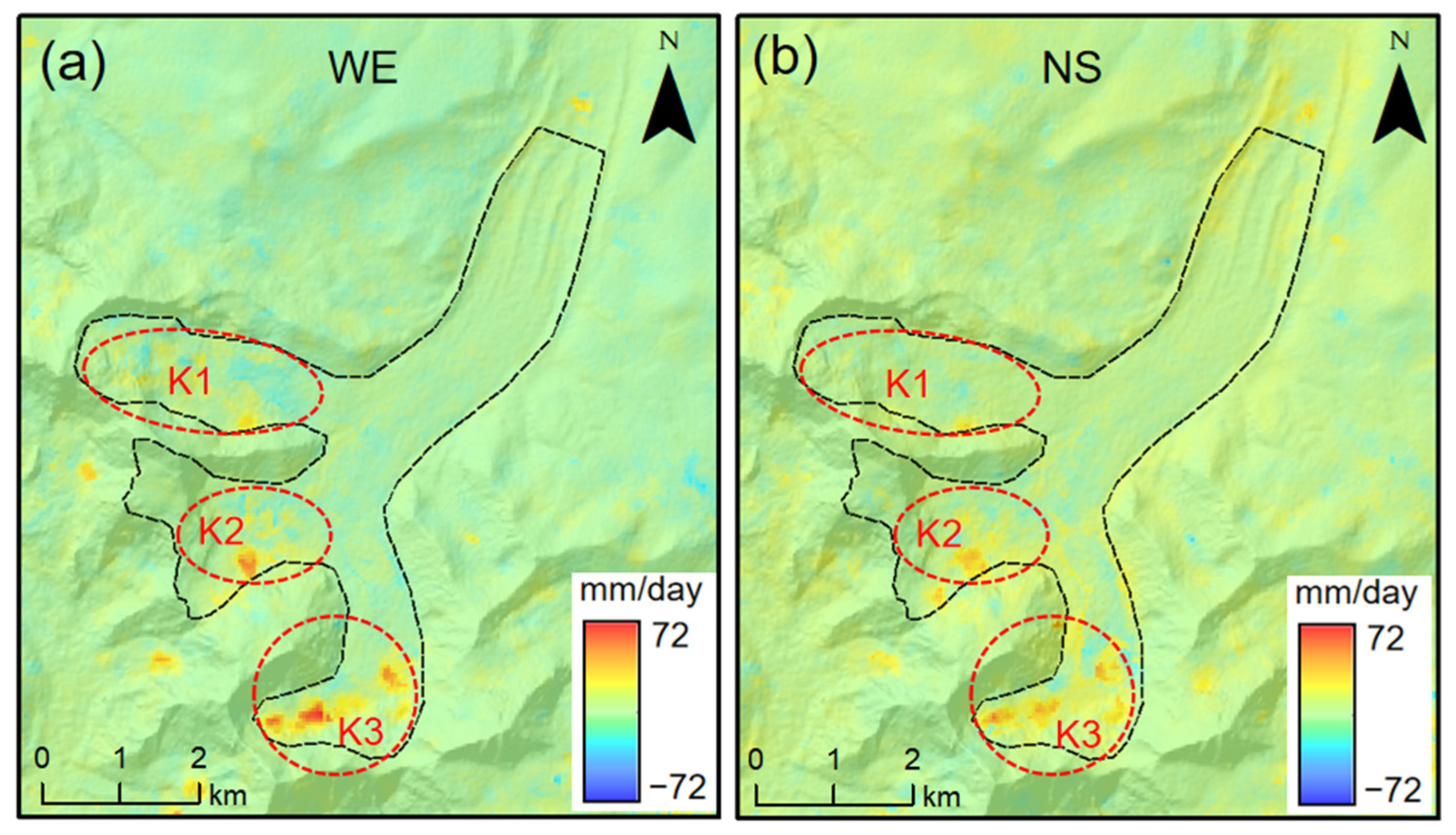
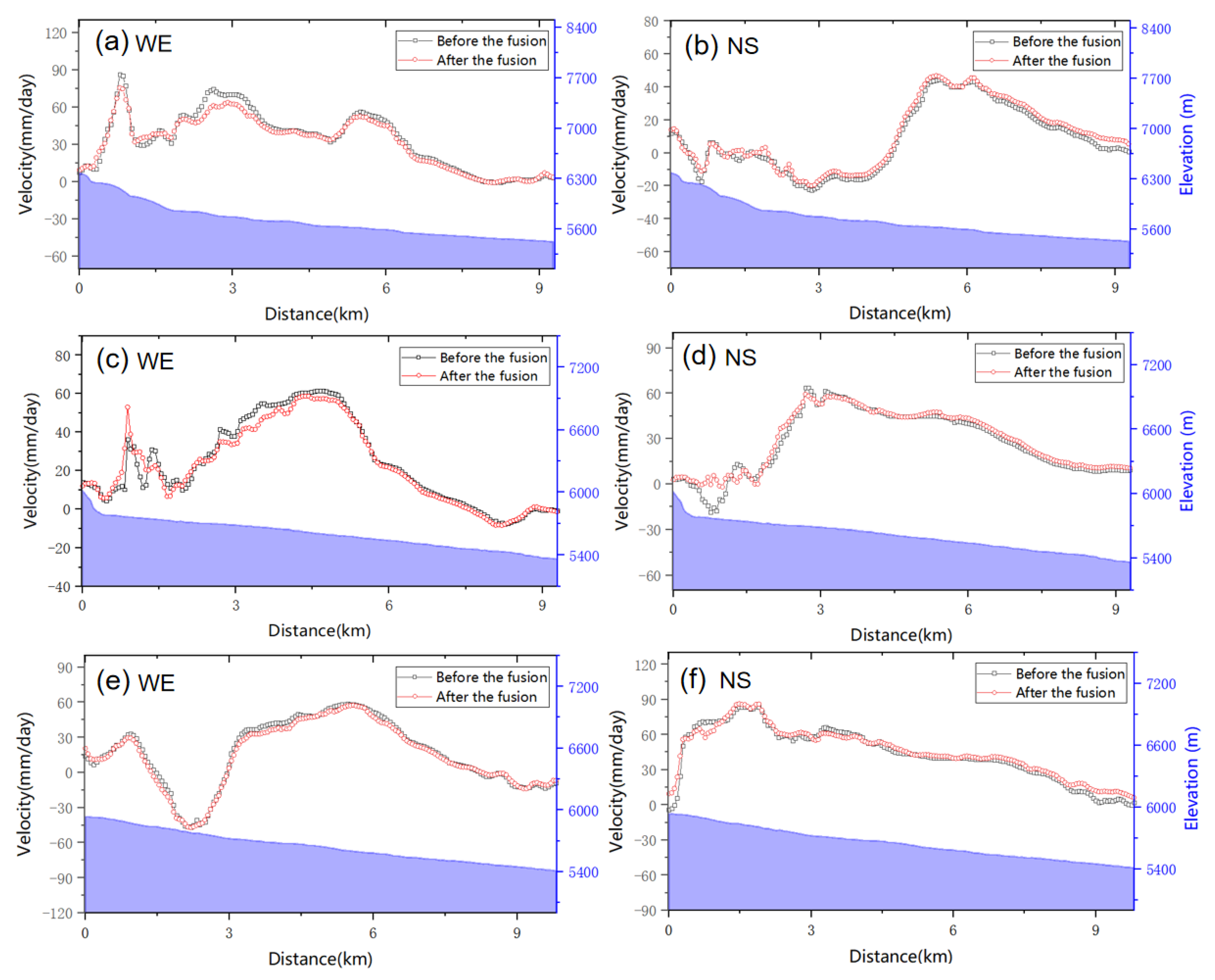
4.2. Comparative Analysis
5. Discussion
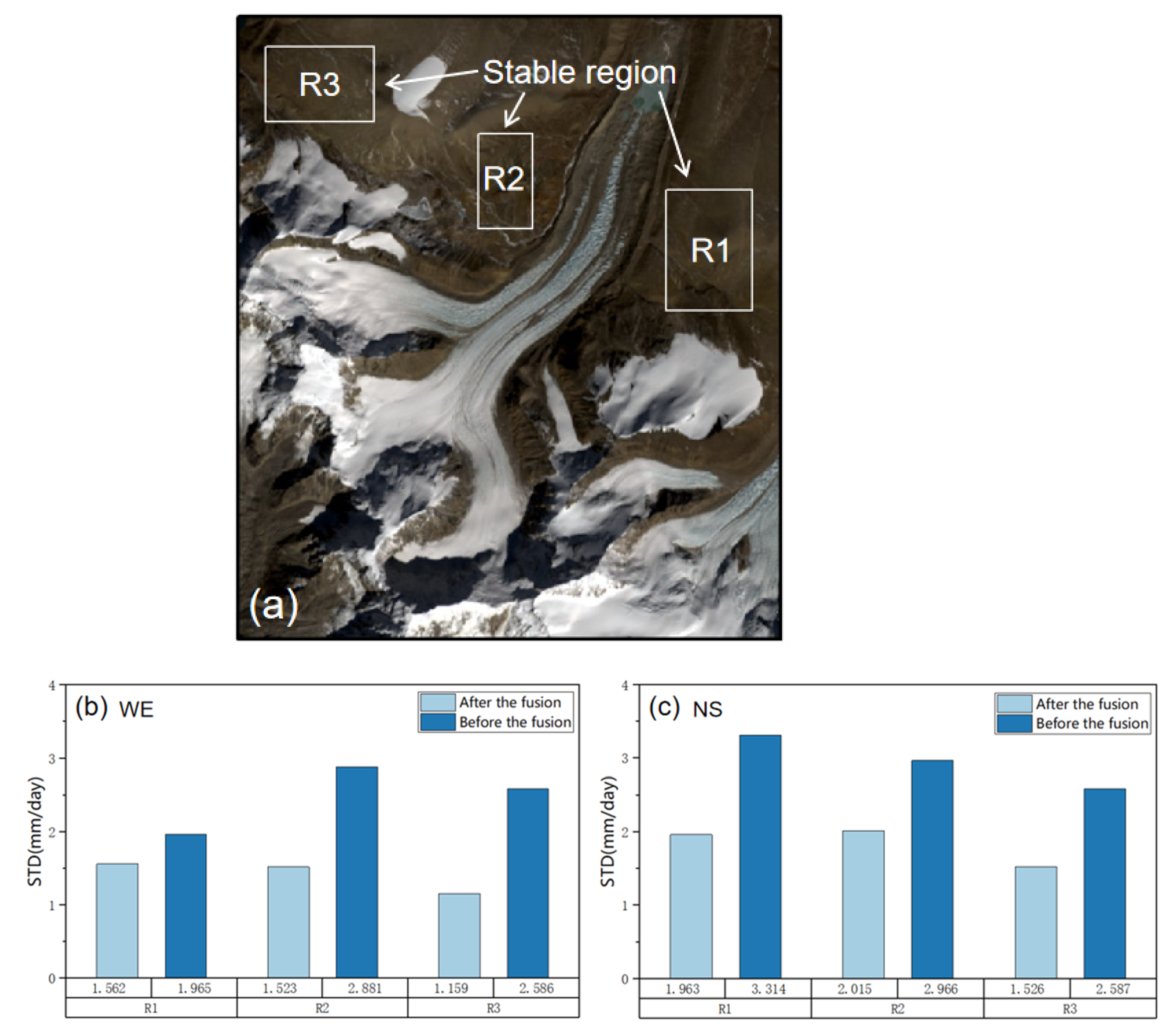
5.1. Precision Analysis
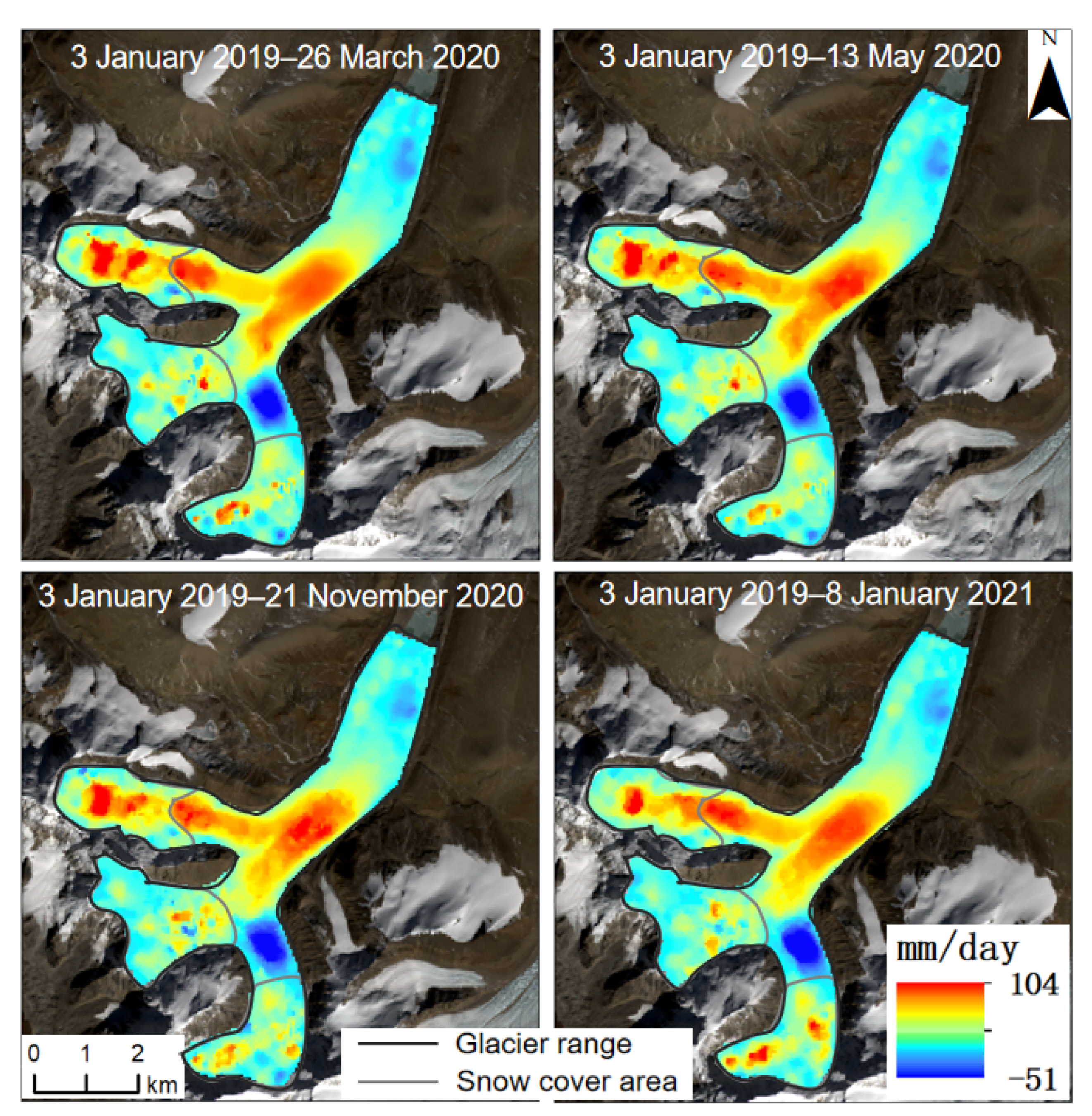
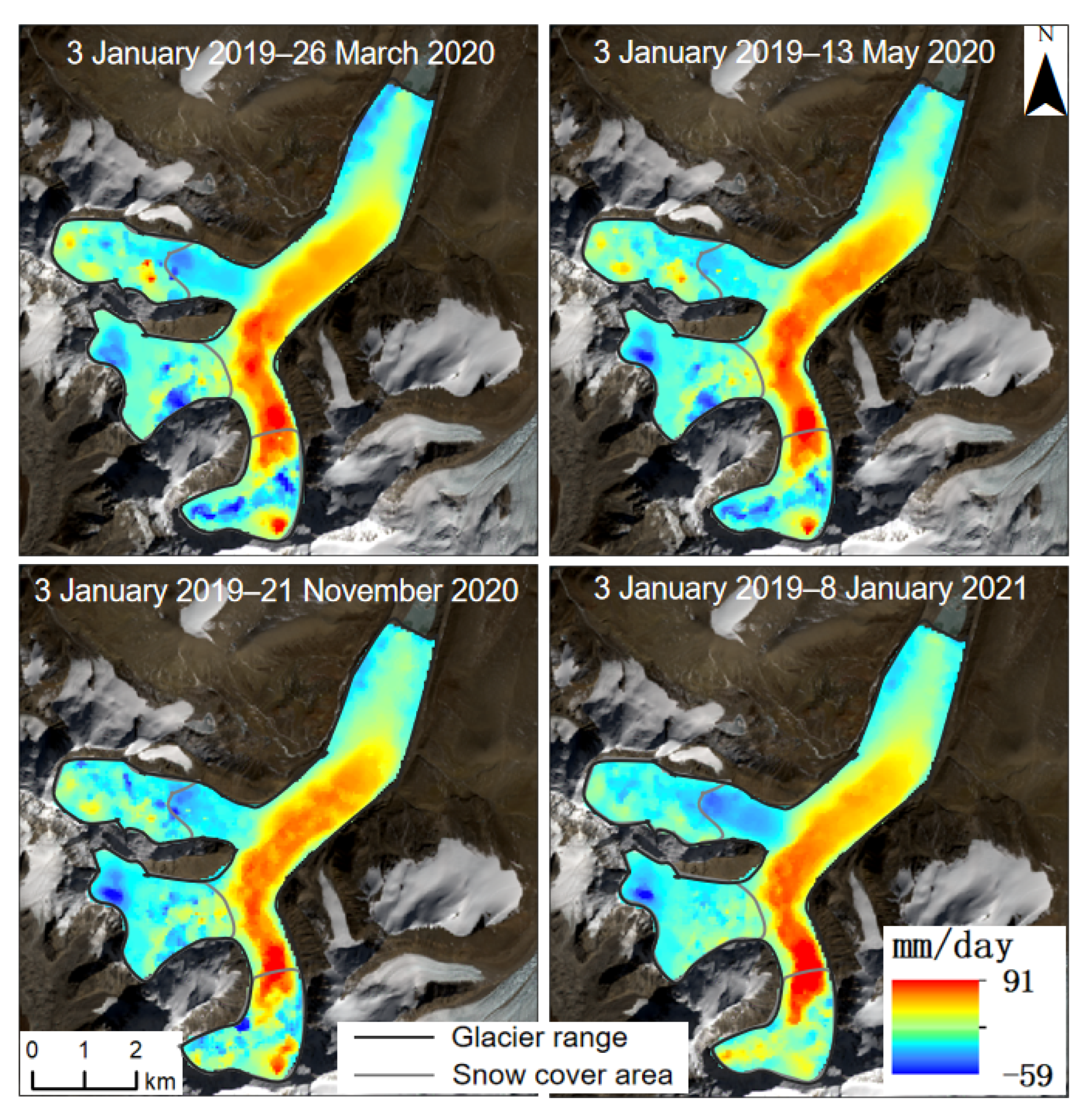
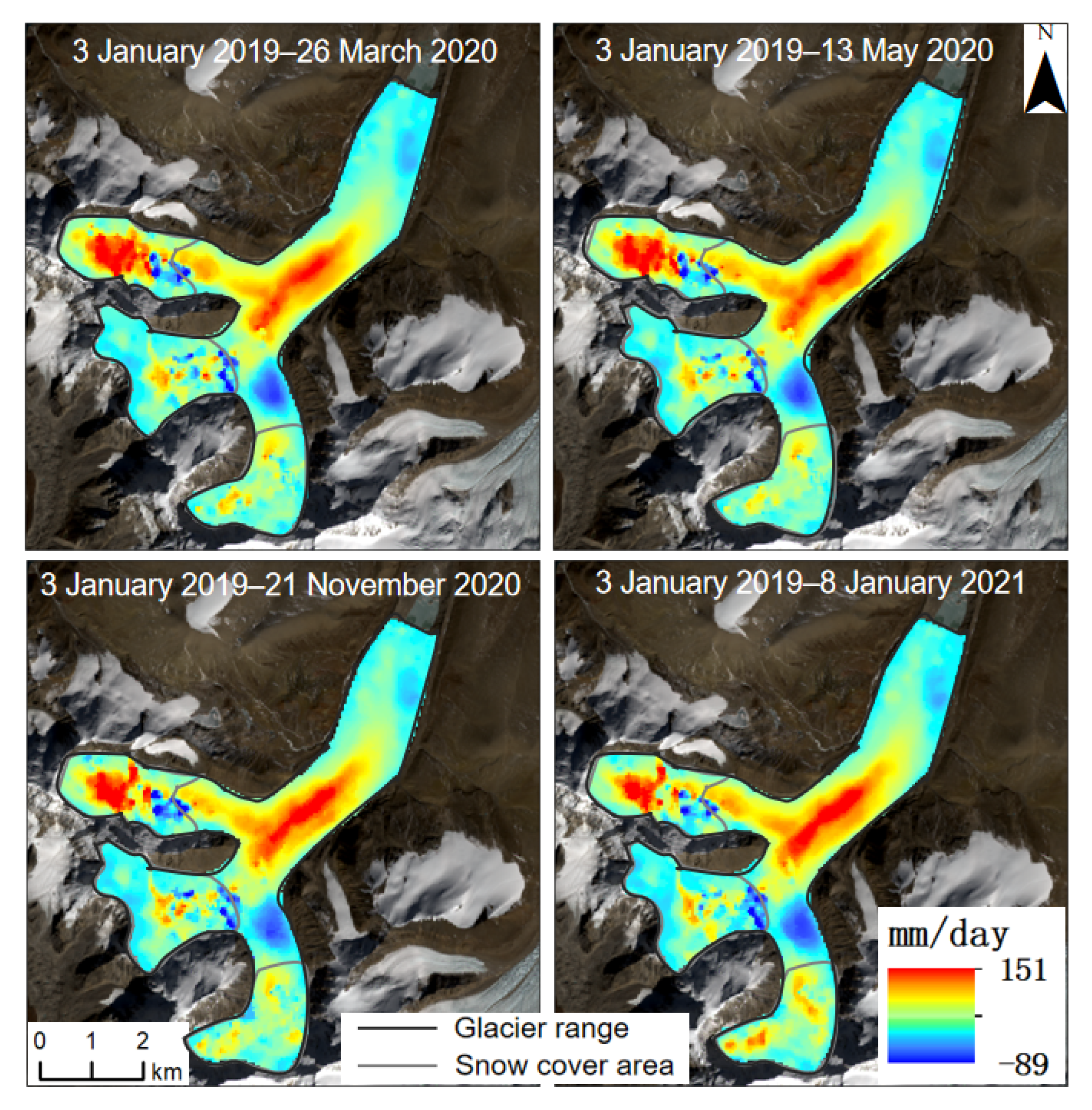
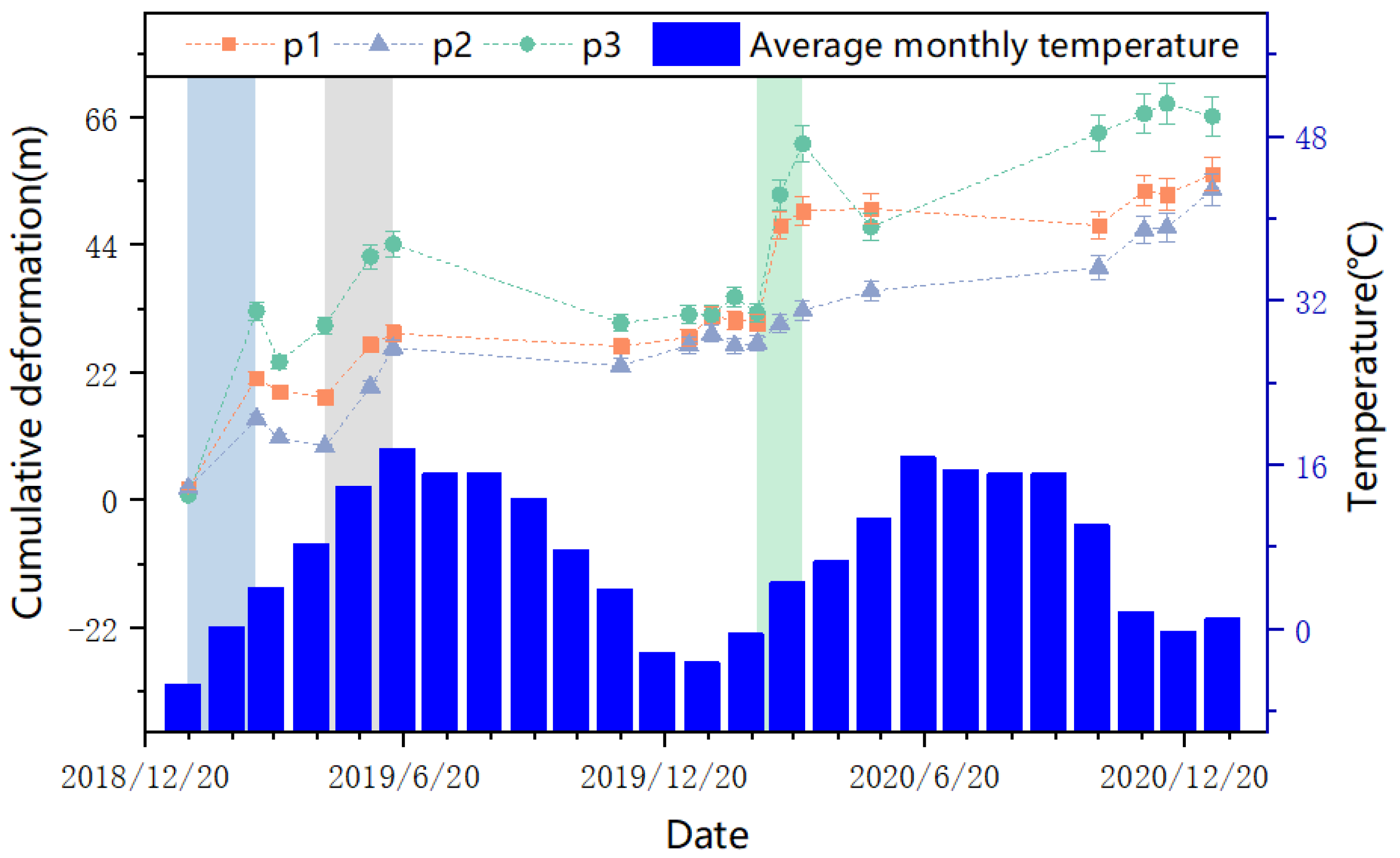
5.2. Glacier Time-Series Displacement
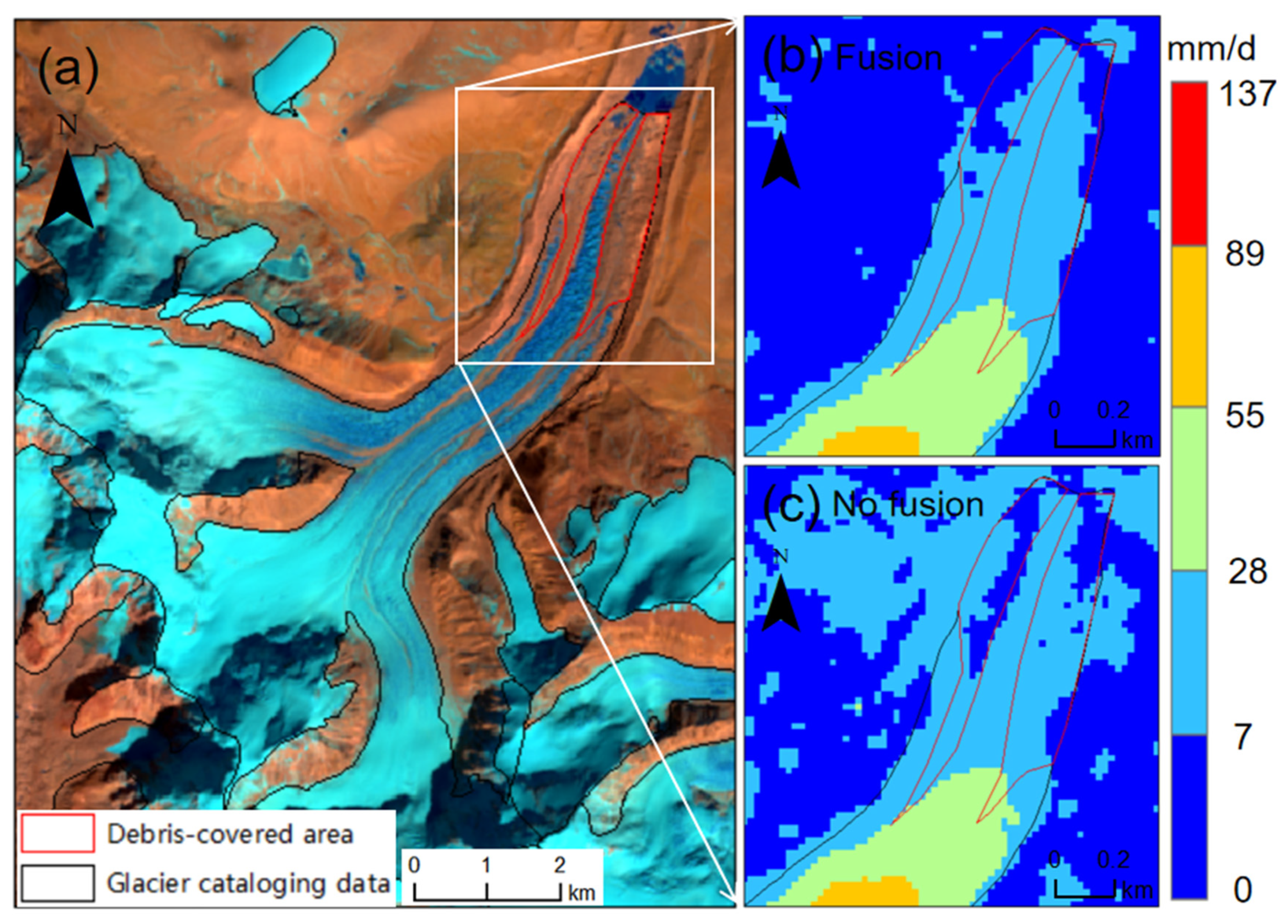
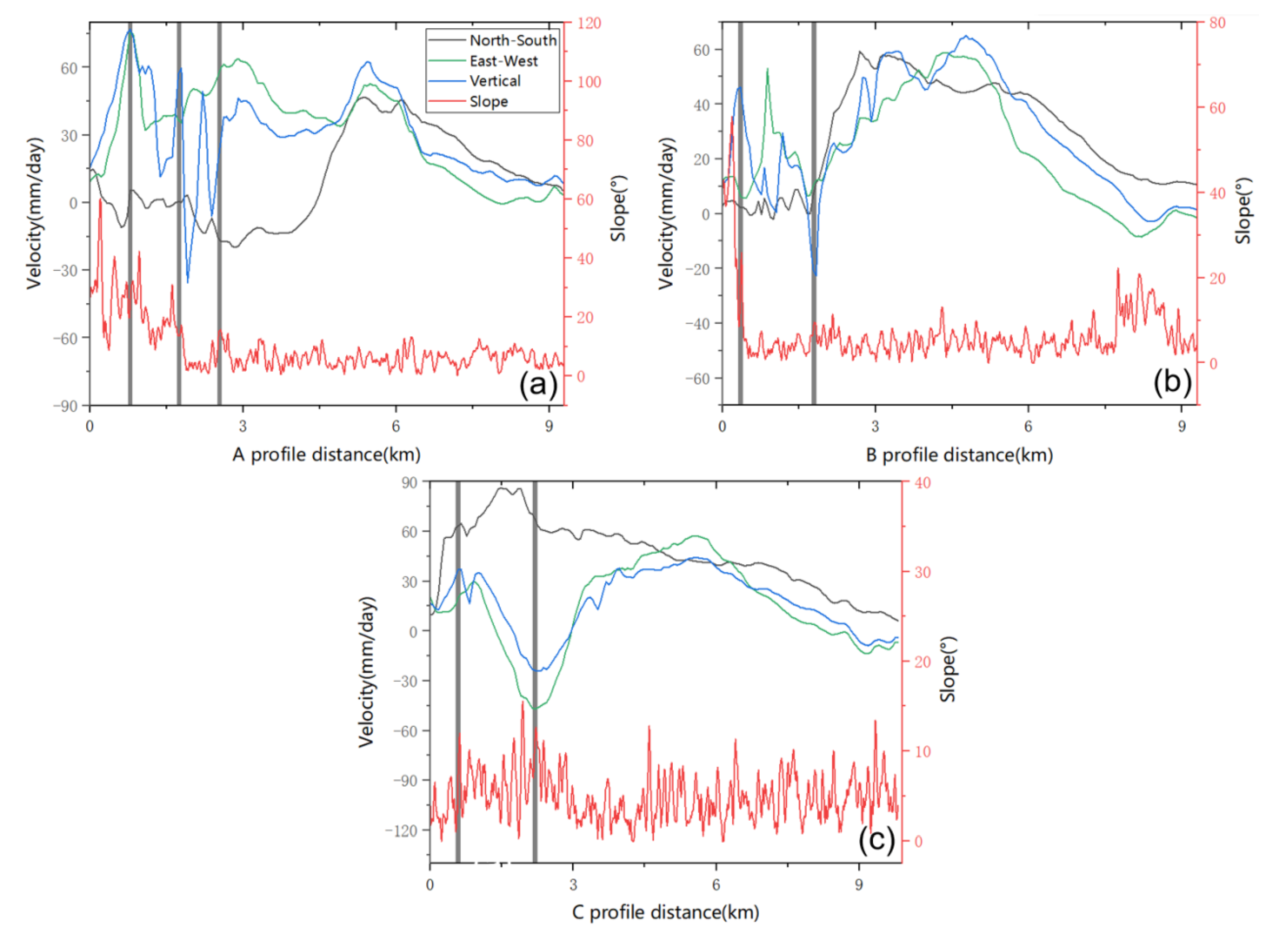
5.3. Factors Affecting Glacier Velocity
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ding, Y.; Liu, S.; Li, J.; Shangguan, D. The retreat of glaciers in response to recent climate warming in western China. Ann. Glaciol. 2006, 43, 97–105. [Google Scholar] [CrossRef] [Green Version]
- Raup, B.; Kääb, A.; Kargel, J.S.; Bishop, M.P.; Hamilton, G.; Lee, E.; Paul, F.; Rau, F.; Soltesz, D.; Khalsa, S.J.; et al. Remote sensing and GIS technology in the Global Land Ice Measurements from Space (GLIMS) Project. Comput. Geosci. 2007, 33, 104–125. [Google Scholar] [CrossRef]
- Rignot, E.; Mouginot, J.; Scheuchl, B. Ice Flow of the Antarctic Ice Sheet. Science 2011, 333, 1427–1430. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kumar, V.; Venkataraman, G.; Høgda, K.A.; Larsen, Y. Estimation and validation of glacier surface motion in the northwestern Himalayas using high-resolution SAR intensity tracking. Int. J. Remote Sens. 2013, 34, 5518–5529. [Google Scholar] [CrossRef]
- Singh, D.K.; Thakur, P.K.; Naithani, B.P.; Dhote, P.R. Spatio-temporal analysis of glacier surface velocity in dhauliganga basin using geo-spatial techniques. Environ. Earth Sci. 2021, 80, 11. [Google Scholar] [CrossRef]
- Yang, C.; Lu, Z.; Zhang, Q.; Zhao, C.; Peng, J.; Ji, L. Deformation at longyao ground fissure and its surroundings, north China plain, revealed by ALOS PALSAR PS-InSAR. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 1–9. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, X.; Ge, D.; Liu, B. Motion Characteristics of the South Inilchek Glacier Derived from New C-band SAR Satellite. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 429–435. [Google Scholar] [CrossRef]
- Vijay, S.; Khan, S.A.; Kusk, A.; Solgaard, A.M.; Moon, T.; Bjørk, A.A. Resolving Seasonal Ice Velocity of 45 Greenlandic Glaciers With Very High Temporal Details. Geophys. Res. Lett. 2019, 46, 1485–1495. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Li, Z.-W.; Wu, L.-X.; Xu, B.; Hu, J.; Zhou, Y.-S.; Miao, Z.-L. Deriving a time series of 3D glacier motion to investigate interactions of a large mountain glacial system with its glacial lake: Use of Synthetic Aperture Radar Pixel Offset-Small Baseline Subset technique. J. Hydrol. 2018, 559, 596–608. [Google Scholar] [CrossRef]
- Dehecq, A.; Gourmelen, N.; Trouve, E. Deriving large-scale glacier velocities from a complete satellite archive: Application to the Pamir–Karakoram–Himalaya. Remote Sens. Environ. 2015, 162, 55–66. [Google Scholar] [CrossRef]
- Berthier, E.; Vadon, H.; Baratoux, D.; Arnaud, Y.; Vincent, C.; Feigl, K.; Rémy, F.; Legrésy, B. Surface motion of mountain glaciers derived from satellite optical imagery. Remote Sens. Environ. 2005, 95, 14–28. [Google Scholar] [CrossRef]
- Bontemps, N.; Lacroix, P.; Doin, M.-P. Inversion of deformation fields time-series from optical images, and application to the long term kinematics of slow-moving landslides in Peru. Remote Sens. Environ. 2018, 210, 144–158. [Google Scholar] [CrossRef]
- Gray, L. Using multiple RADARSAT InSAR pairs to estimate a full three-dimensional solution for glacial ice movement. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Xia, X.; Bi, H.; Huang, H.; Ding, R.; Zhao, L. Land subsidence of the Yellow River Delta in China driven by river sediment compaction. Sci. Total Environ. 2021, 750, 142165. [Google Scholar] [CrossRef] [PubMed]
- Ao, M.; Zhang, L.; Liao, M.S.; Zhang, L. Deformation monitoring with adaptive integration of multi-source InSAR data based on variance component estimation. Chin. J. Geophys.-Chin. Ed. 2020, 63, 2901–2911. [Google Scholar] [CrossRef]
- Hu, J.; Liu, J.; Wu, L.X.; Li, Z.W.; Sun, Q. Integration of Heterogeneous InSAR Measurements for Mapping Complete and Accurate Three-Dimensional Surface Displacements: A Case Study of 2016 Mw 7.8 Kaiköura Earthquake, New Zealand. In Proceedings of the Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018; pp. 1460–1465. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, J.; Li, Z.; Yang, Z.; Yang, J.; Li, G. Three-Dimensional Flow Velocity Estimation of Mountain Glacier Based on SAR Interferometry and Offset-Tracking Technology: A Case of the Urumqi Glacier No.1. Water 2022, 14, 1779. [Google Scholar] [CrossRef]
- Su, Z.; Orlov, A.B. A brief study on the Sino-Soviet Union Shishapangma Glacier in 1991. J. Glaciol. Geocryol. 1992, 184–186. Available online: http://www.bcdt.ac.cn/CN/Y1992/V14/I2/184 (accessed on 26 July 2022).
- Li, H.; Yang, C.; Hui, W.; Zhu, S.; Zhang, Q. Changes of glaciers and glacier lakes in alpine and extremely alpine regions using remote sensing technology: A case study in the Shisha Pangma area of southern Tibet. Chin. J. Geol. Hazard Control 2021, 32, 10–17. [Google Scholar] [CrossRef]
- Jiang, S.; Nie, Y.; Liu, Q.; Wang, J.; Liu, L.; Hassan, J.; Liu, X.; Xu, X. Glacier Change, Supraglacial Debris Expansion and Glacial Lake Evolution in the Gyirong River Basin, Central Himalayas, between 1988 and 2015. Remote Sens. 2018, 10, 986. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Bolch, T.; Allen, S.; Linsbauer, A.; Chen, W.; Wang, W. Glacial lake evolution and glacier–lake interactions in the Poiqu River basin, central Himalaya, 1964–2017. J. Glaciol. 2019, 65, 347–365. [Google Scholar] [CrossRef]
- Zhang, L.; Liao, M.; Feng, G.; Dong, J.; Ao, M.; Yu, Y. Quantifying the spatio-temporal patterns of dune migration near Minqin Oasis in northwestern China with time series of Landsat-8 and Sentinel-2 observations. Remote Sens. Environ. 2019, 236, 111498. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Kong, F.; Qiang, G.; Wang, W. Comparison of four ice velocity measurement software based on optical remote sensing images. Highlights Sci. Online 2016, 9, 1240–1252. Available online: https://www.nstl.gov.cn/paper_detail.html?id=a6956a13978596f39ca155a6562096c1 (accessed on 26 July 2022).
- Liu, L.; Song, H.; Du, Y.; Feng, G.; Liu, Q.; Sun, M. Time-Series Offset Tracking of the Baige Landslide Based on Sentinel-2 and Landsat 8. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1461–1470. [Google Scholar]
- Hu, J. Theory and Method of Estimating Three-Dimensional Displacement with InSAR Based on the Modern Surveying Adjustment. Ph.D. Thesis, Central South University, CNKI, Changsha, China, 2013. [Google Scholar]
- Ran, W.; Wang, X.; Guo, W.; Zhao, H.; Zhao, X.; Liu, S.; Wei, J.; Zhang, Y. Glacier cataloging dataset in western China, 2017-2018. China Sci. Data 2021, 6, 195–204. [Google Scholar]
- Guan, W.; Cao, B.; Pan, B. Research of glacier flow velocity: Current situation and prospects. J. Glaciol. Geocryol. 2020, 42, 1101–1114. [Google Scholar]
- Xiong, J.; Fan, X.; Dou, X.; Yang, Y. Seasonal variation of velocity of Yarong glacier in Ranwu Lake Basin, Southeast Tibet. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1579–1588. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.; Wang, C.; Zhu, J.; Ding, X. Estimation of the movement of Yinericek Glacier in the south of Tianshan by SAR offset tracking technique. Chin. J. Geophys.-Chin. Ed. 2013, 56, 1226–1236. [Google Scholar]
- Wang, X.; Liu, Q.; Jiang, L.; Liu, S.; Ding, Y.; Jiang, Z. Characteristics of glacier velocity and its influencing factors in Mount Qomolangma region of the Himalayas based on SAR images. J. Glaciol. Geocryol. 2015, 37, 570–579. [Google Scholar]
- Jing, Z.; Zhou, Z.; Liu, L. Progress of the Research on Glacier Velocities in China. J. Glaciol. Geocryol. 2010, 32, 749–754. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit Direction | Ascending |
|---|---|
| Track No. | 85 |
| Incidence angle at scene center (°) | 33.9° |
| Azimuth angle (°) | −10.1° |
| Imaging mode | Interferometric Wide swath |
| Polarization mode | VV |
| Number of scenes | 31 |
| Acquisition period (yyyymmdd) | 6 January 2019–26 December 2020 |
| Image Bands | Panchromatic Band |
|---|---|
| Spatial resolution/m | 15 |
| Data Product level | Level-1T |
| Central wavelength/μm | 0.59 |
| Revisit cycle/d | 16 |
| Number of scenes | 19 |
| Acquisition period (yyyymmdd) | 3 January 2019–8 January 2021 |
| Time Range | 3 January 2019–26 March 2020 | 3 January 2019–13 May 2020 | 3 January 2019–21 November 2020 | 3 January 2019–8 January 2021 |
|---|---|---|---|---|
| Number of SAR image pairs | 34 | 37 | 51 | 54 |
| Number of optical image pairs | 13 | 16 | 20 | 34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Wei, C.; Ding, H.; Wei, Y.; Zhu, S.; Li, Z. Inversion of Glacier 3D Displacement from Sentinel-1 and Landsat 8 Images Based on Variance Component Estimation: A Case Study in Shishapangma Peak, Tibet, China. Remote Sens. 2023, 15, 4. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15010004
Yang C, Wei C, Ding H, Wei Y, Zhu S, Li Z. Inversion of Glacier 3D Displacement from Sentinel-1 and Landsat 8 Images Based on Variance Component Estimation: A Case Study in Shishapangma Peak, Tibet, China. Remote Sensing. 2023; 15(1):4. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15010004
Chicago/Turabian StyleYang, Chengsheng, Chunrui Wei, Huilan Ding, Yunjie Wei, Sainan Zhu, and Zufeng Li. 2023. "Inversion of Glacier 3D Displacement from Sentinel-1 and Landsat 8 Images Based on Variance Component Estimation: A Case Study in Shishapangma Peak, Tibet, China" Remote Sensing 15, no. 1: 4. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15010004