
Mapping Forest Growing Stem Volume Using Novel Feature Evaluation Criteria Based on Spectral Saturation in Planted Chinese Fir Forest
 , , and
, , and
Abstract
:
1. Introduction
2. Study Area and Data
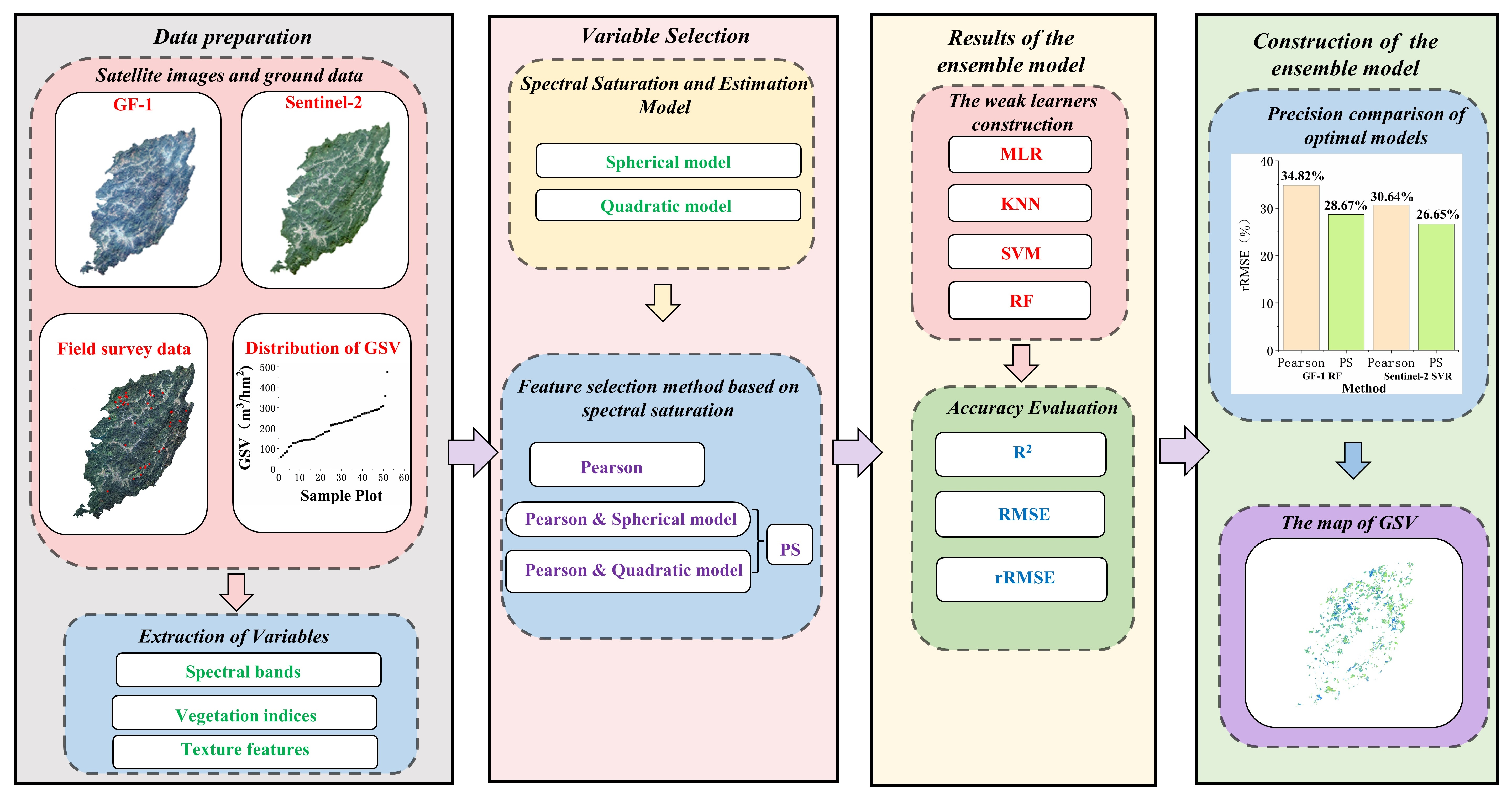
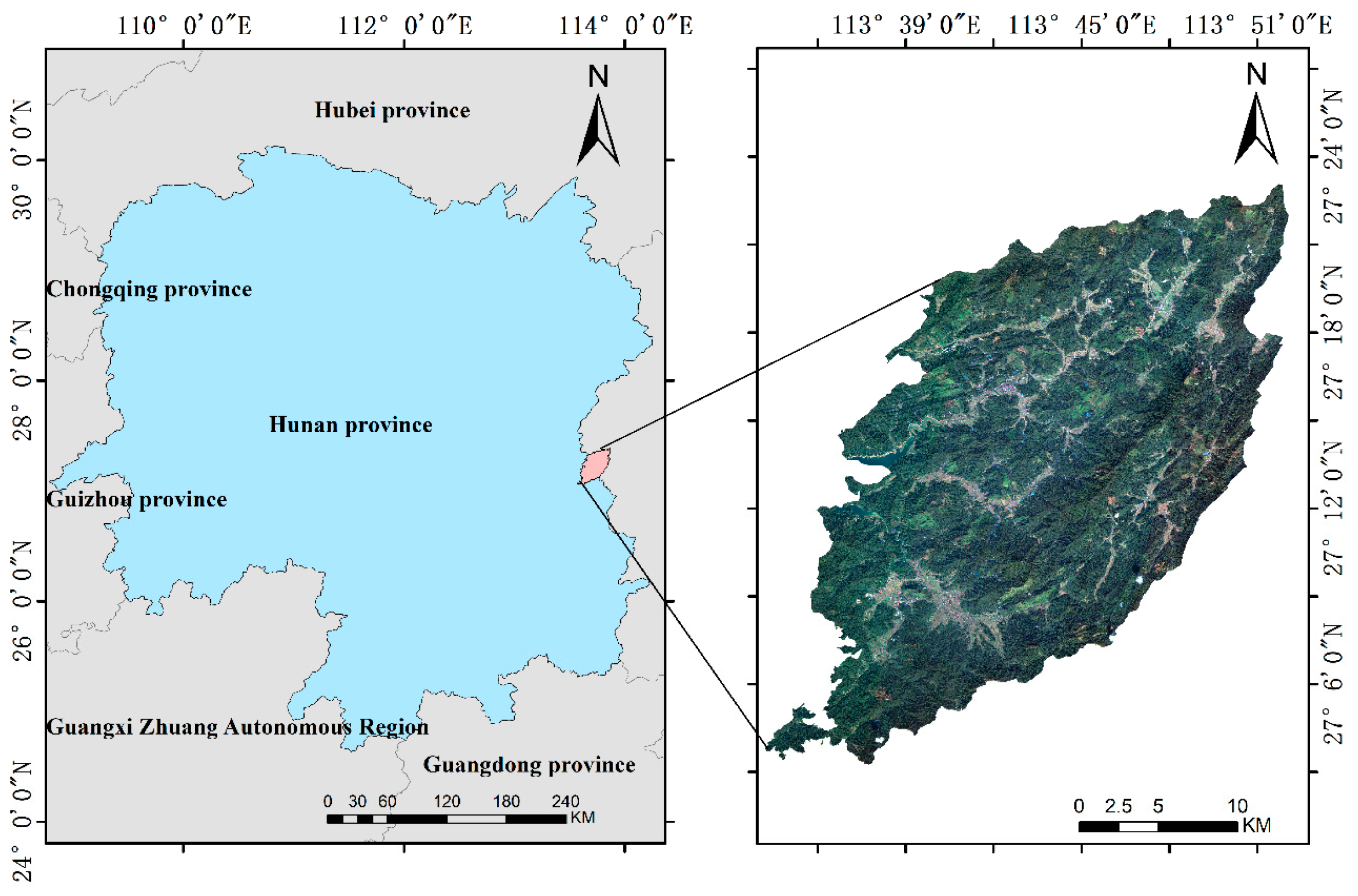
2.1. Study Area
2.2. Data Preparation
- (1)
- Ground Data
- (2)
- Remote sensing data and pre-processing
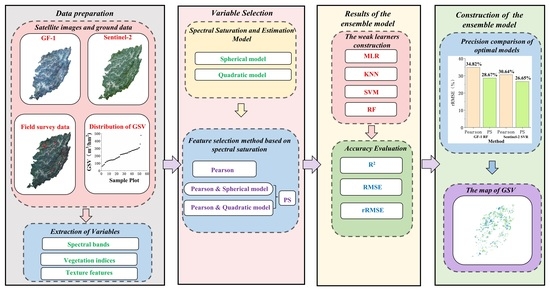
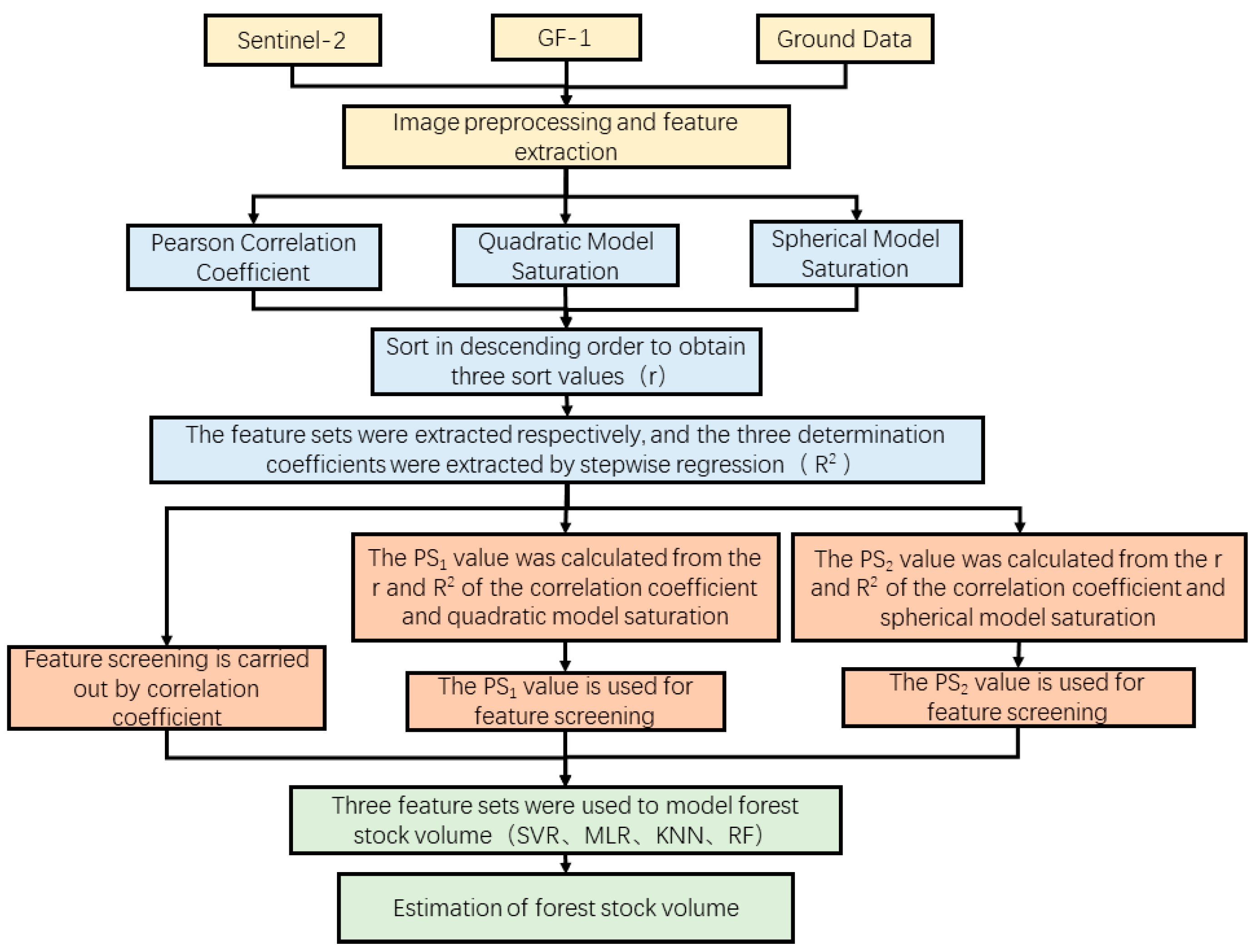
3. Methods
3.1. Extracting Features
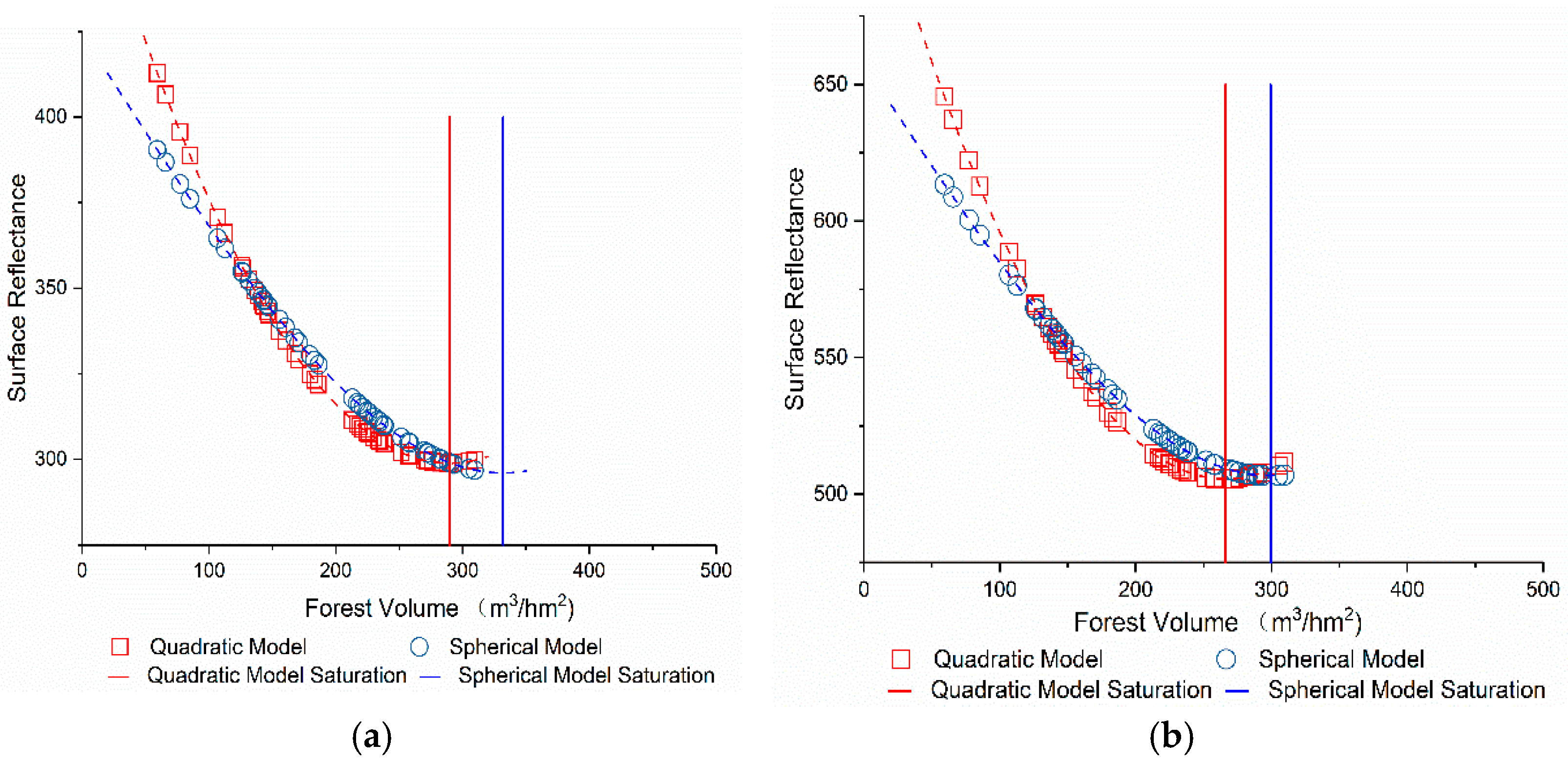
3.2. Spectral Saturation and Estimation Model
- (1)
- Kriging Model
- (2)
- Quadratic model
3.3. Feature Selection Method Based on Spectral Saturation
3.4. Model Evaluation and Application
4. Results
4.1. Saturation Values of Features
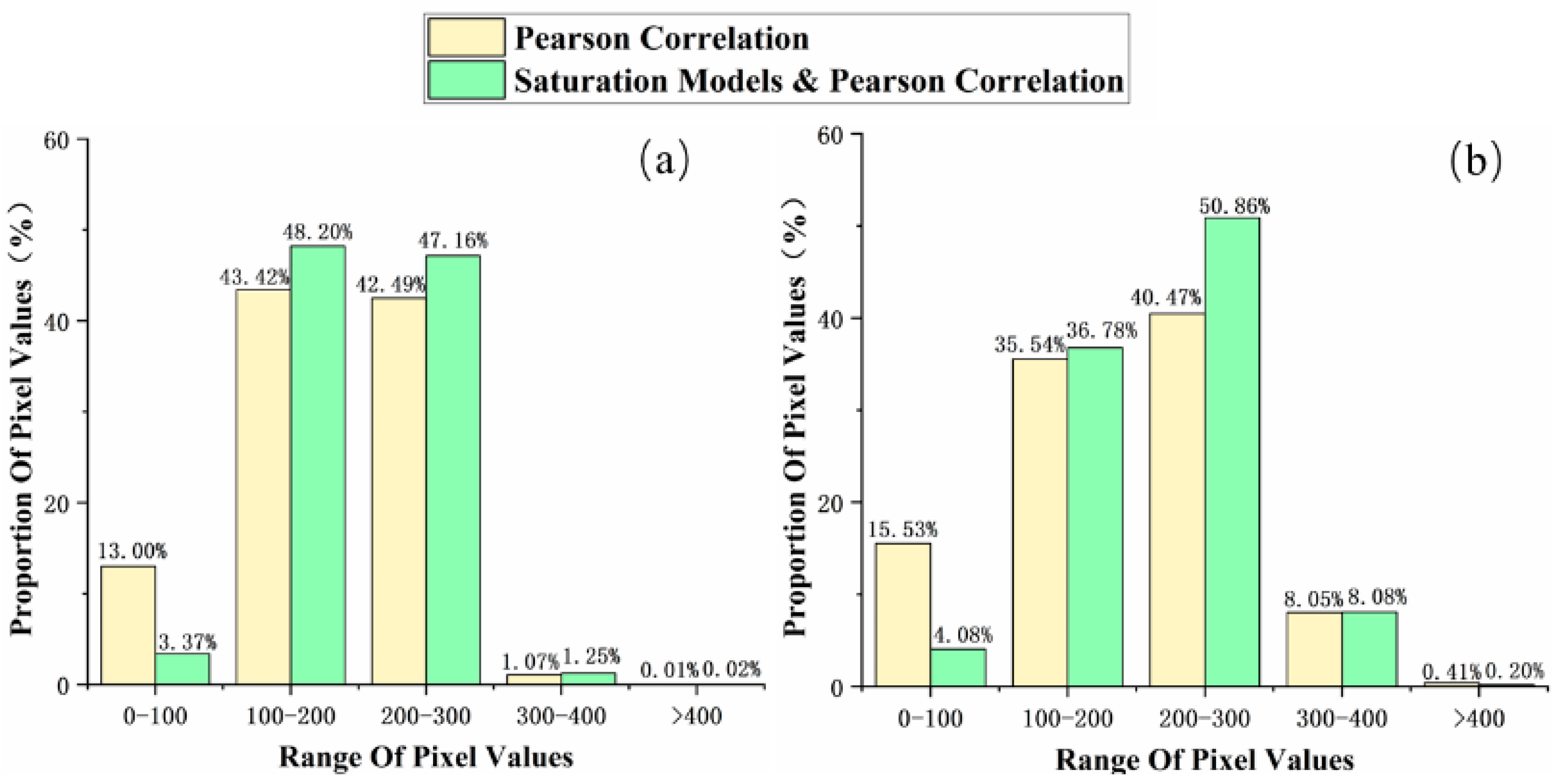
4.2. The Results of Proposed Feature Evaluation Criteria
4.3. Optimal Feature Set
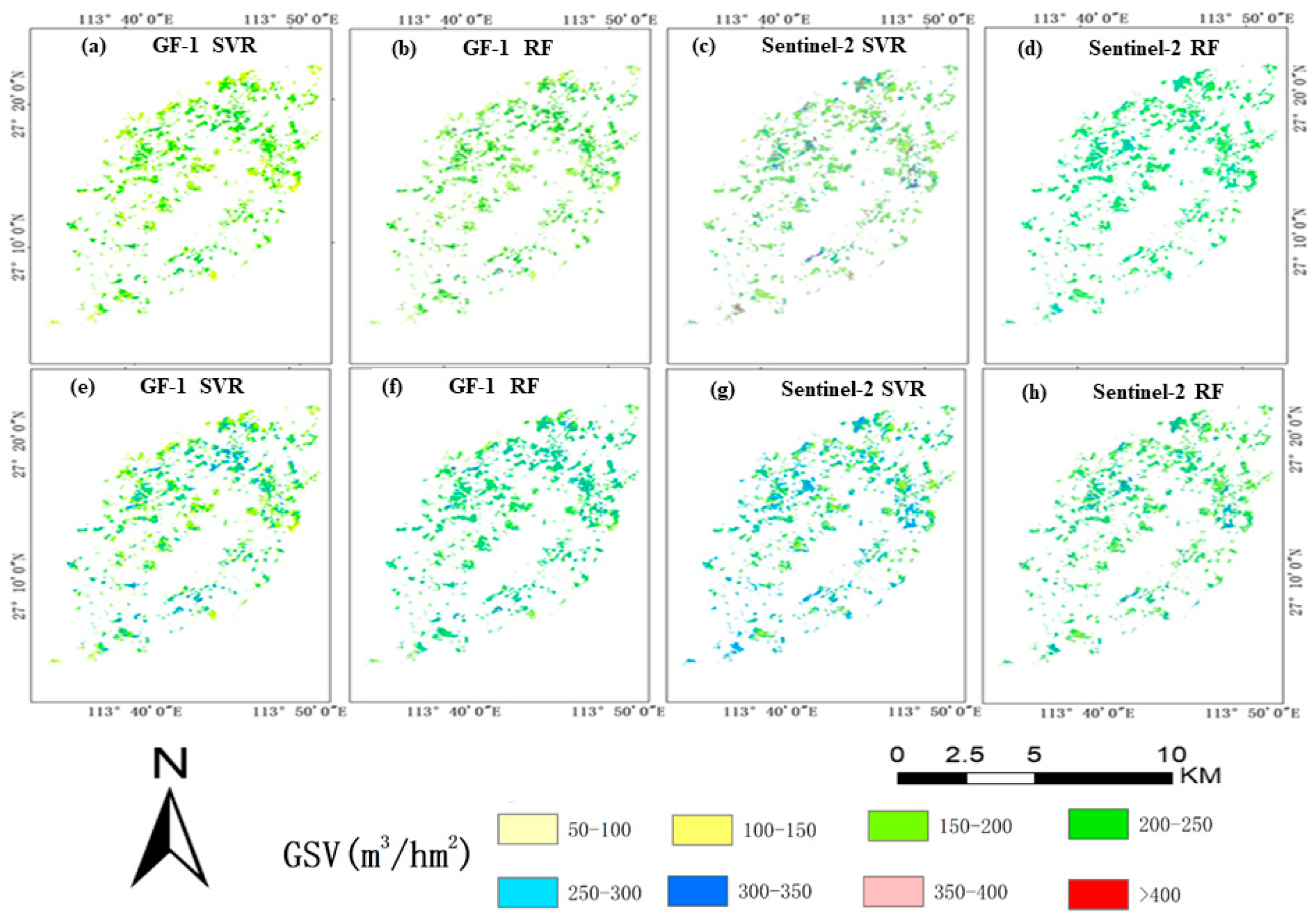
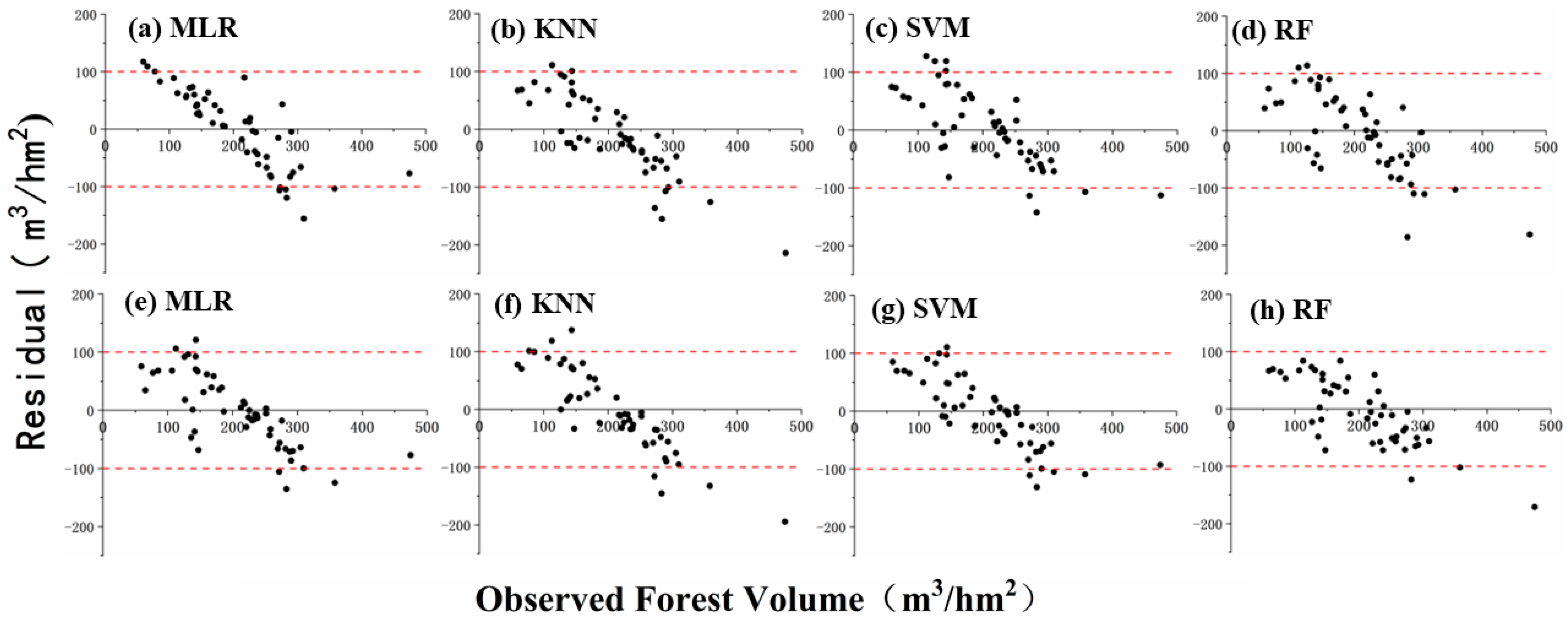
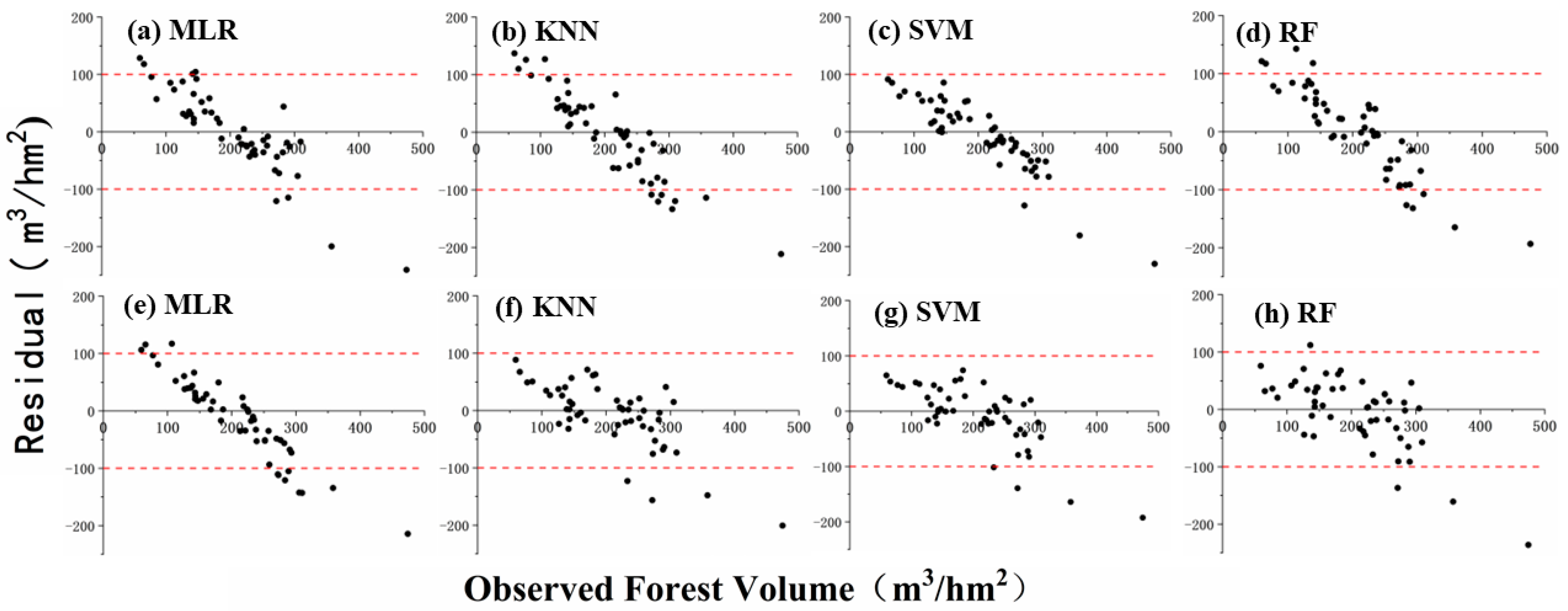
4.4. The Results of Estimated Forest GSV
5. Discussion
5.1. Saturation Levels and Quantitative Model
5.2. The Contribution of Proposed Feature Selection Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vangi, E.; D’Amico, G.; Francini, S.; Giannetti, F.; Lasserre, B.; Marchetti, M.; McRoberts, R.E.; Chirici, G. The Effect of Forest Mask Quality in the Wall-to-Wall Estimation of Growing Stock Volume. Remote Sens. 2021, 13, 1038. [Google Scholar] [CrossRef]
- Xu, X.; Lin, H.; Liu, Z.; Ye, Z.; Li, X.; Long, J. A Combined Strategy of Improved Variable Selection and Ensemble Algorithm to Map the Growing Stem Volume of Planted Coniferous Forest. Remote Sens. 2021, 13, 4631. [Google Scholar] [CrossRef]
- Walshe, D.; McInerney, D.; Paulo Pereira, J.; Byrne, K.A. Investigating the Effects of k and Area Size on Variance Estimation of Multiple Pixel Areas Using a k-NN Technique for Forest Parameters. Remote Sens. 2021, 13, 4688. [Google Scholar] [CrossRef]
- Asner, G.P.; Alencar, A. Drought impacts on the amazon forest: The remote sensing perspective. New Phytol. 2010, 187, 569–578. [Google Scholar] [CrossRef] [PubMed]
- Dengsheng, L. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Roberts, J.W.; Van Aardt, J.A.N.; Ahmed, F.B. Image fusion for enhanced forest structural assessment. Int. J. Remote Sens. 2011, 32, 243–266. [Google Scholar] [CrossRef]
- Vastaranta, M.; Yu, X.; Luoma, V.; Karjalainen, M.; Saarinen, N.; Wulder, M.A.; White, J.C.; Persson, H.J.; Hollaus, M.; Yrttimaa, T.; et al. Aboveground forest biomass derived using multiple dates of WorldView-2 stereo-imagery: Quantifying the improvement in estimation accuracy. Sci. Total Environ. 2019, 39, 8766–8783. [Google Scholar] [CrossRef] [Green Version]
- Abdullahi, S.; Kugler, F.; Pretzsch, H. Prediction of stem volume in complex temperate forest stands using TanDEM-X SARdata. Remote Sens. Environ. 2016, 174, 197–211. [Google Scholar] [CrossRef]
- Mascaro, J.; Detto, M.; Asner, G.P.; Muller-Landau, H.C. Evaluating uncertainty in mapping forest carbon with airborne LiDAR. Remote Sens. Environ. 2011, 115, 3770–3774. [Google Scholar] [CrossRef]
- Jiang, F.; Smith, A.R.; Kutia, M.; Wang, G.; Liu, H.; Sun, H. A Modified KNN Method for Mapping the Leaf Area Index in Arid and Semi-Arid Areas of China. Remote Sens. 2020, 12, 1884. [Google Scholar] [CrossRef]
- Foody, G.M.; Boyd, D.S.; Cutler, M.E. Predictive relations of tropical forest biomass from Landsat TM data and their transferability between regions. Remote Sens. Environ. 2003, 85, 463–474. [Google Scholar] [CrossRef]
- Li, X.; Zhang, M.; Long, J.; Lin, H. A Novel Method for Estimating Spatial Distribution of Forest Above-Ground Biomass Based on Multispectral Fusion Data and Ensemble Learning Algorithm. Remote Sens. 2021, 13, 3910. [Google Scholar] [CrossRef]
- Franco-Lopez, H.; Ek, A.R.; Bauer, M.E. Estimation and mapping of forest stand density, volume, and cover type using the k-nearest neighbors method. Remote Sens. Environ. 2001, 77, 251–274. [Google Scholar] [CrossRef]
- Balenović, I.; Milas, A.S.; Marjanović, H. A Comparison of Stand-Level Volume Estimates from Image-Based Canopy Height Models of Different Spatial Resolutions. Remote Sens. 2017, 9, 205. [Google Scholar] [CrossRef] [Green Version]
- Reiche, J.; Hamunyela, E.; Verbesselt, J.; Hoekman, D.; Herold, M. Improving near-real time deforestation monitoring in tropical dry forests by combining dense Sentinel-1 time series with Landsat and ALOS-2 PALSAR-2. Remote Sens. Environ. 2018, 204, 147–161. [Google Scholar] [CrossRef]
- Cao, L.; Pan, J.; Li, R.; Li, J.; Li, Z. Integrating Airborne LiDAR and Optical Data to Estimate Forest Aboveground Biomass in Arid and Semi-Arid Regions of China. Remote Sens. 2018, 10, 532. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Wang, J.; Liang, S.; Xiao, Z. Extended Data-Based Mechanistic Method for Improving Leaf Area Index Time Series Estimation with Satellite Data. Remote Sens. 2017, 9, 533. [Google Scholar] [CrossRef] [Green Version]
- Zhao, P.; Lu, D.; Wang, G.; Wu, C.; Huang, Y.; Yu, S. Examining Spectral Reflectance Saturation in Landsat Imagery and Corresponding Solutions to Improve Forest Aboveground Biomass Estimation. Remote Sens. 2016, 8, 469. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Xiong, Y.; Jiang, F.; Chen, S.; Sun, H. A Novel Vegetation Point Cloud Density Tree-Segmentation Model for Overlapping Crowns Using UAV LiDAR. Remote Sens. 2021, 13, 1442. [Google Scholar] [CrossRef]
- Hu, T.; Zhang, Y.; Su, Y.; Zheng, Y.; Lin, G.; Guo, Q. Mapping the Global Mangrove Forest Aboveground Biomass Using Multisource Remote Sensing Data. Remote Sens. 2020, 12, 1690. [Google Scholar] [CrossRef]
- Cui, Y.; Sun, H.; Wang, G.; Li, C.; Xu, X. A Probability-Based Spectral Unmixing Analysis for Mapping Percentage Vegetation Cover of Arid and Semi-Arid Areas. Remote Sens. 2019, 11, 3038. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Lin, H.; Long, J.; Zhang, M.; Liu, Z. Analyzing the Saturation of Growing Stem Volume Based on ZY-3 Stereo and Multispectral Images in Planted Coniferous Forest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 50–61. [Google Scholar] [CrossRef]
- Li, X.; Long, J.; Zhang, M.; Liu, Z.; Lin, H. Coniferous Plantations Growing Stock Volume Estimation Using Advanced Remote Sensing Algorithms and Various Fused Data. Remote Sens. 2021, 13, 3468. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, X.; Wu, F.; Sun, Z.; Xia, H.; Meng, Q.; Huang, W.; Zhou, H.; Gao, J.; Li, W.; et al. Estimating Forest Stock Volume in Hunan Province, China, by Integrating In Situ Plot Data, Sentinel-2 Images, and Linear and Machine Learning Regression Models. Remote Sens. 2020, 12, 186. [Google Scholar] [CrossRef] [Green Version]
- Heilmeier, A.W.S.K. Improved strategy for estimating stem volume and forest biomass using moderate resolution remote sensing data and GIS. J. For. Res. 2010, 21, 1–12. [Google Scholar] [CrossRef]
- Eckert, S. Improved Forest Biomass and Carbon Estimations Using Texture Measures from WorldView-2 Satellite Data. Remote Sens. 2012, 4, 810–829. [Google Scholar] [CrossRef] [Green Version]
- Narine, L.L.; Popescu, S.C.; Malambo, L. Synergy of ICESat-2 and Landsat for Mapping Forest Aboveground Biomass with Deep Learning. Remote Sens. 2019, 11, 1503. [Google Scholar] [CrossRef]
- Fanos, A.M.; Pradhan, B.; Alamri, A.; Lee, C.-W. Machine Learning-Based and 3D Kinematic Models for Rockfall Hazard Assessment Using LiDAR Data and GIS. Remote Sens. 2020, 12, 1755. [Google Scholar] [CrossRef]
- Sun, H.; Wang, Q.; Wang, G.; Lin, H.; Luo, P.; Li, J.; Zeng, S.; Xu, X.; Ren, L. Optimizing kNN for Mapping Vegetation Cover of Arid and Semi-Arid Areas Using Landsat Images. Remote Sens. 2018, 10, 1248. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, R.; Siqueira, P.; Hensley, S.; Chapman, B.; Bergen, K. A survey of temporal decorrelation from spaceborne L-Band repeat-pass InSAR. Remote Sens. Environ. 2011, 115, 2887–2896. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, Y.; Pu, R.; Zhang, Z. Mapping Robinia Pseudoacacia Forest Health Conditions by Using Combined Spectral, Spatial, and Textural Information Extracted from IKONOS Imagery and Random Forest Classifier. Remote Sens. 2015, 7, 9020–9044. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Ye, Z.; Xu, X.; Lin, H.; Zhang, T.; Long, J. Mapping Forest Stock Volume Based on Growth Characteristics of Crown Using Multi-Temporal Landsat 8 OLI and ZY-3 Stereo Images in Planted Eucalyptus Forest. Remote Sens. 2022, 14, 5082. [Google Scholar] [CrossRef]
- Li, X.; Lin, H.; Long, J.; Xu, X. Mapping the Growing Stem Volume of the Coniferous Plantations in North China Using Multispectral Data from Integrated GF-2 and Sentinel-2 Images and an Optimized Feature Variable Selection Method. Remote Sens. 2021, 13, 2740. [Google Scholar] [CrossRef]
- Almeida, A.C.; Soares, J.V.; Landsberg, J.J.; Rezende, G.D. Growth and water balance of Eucalyptus grandis hybrid plantations in Brazil during a rotation for pulp production. For. Ecol. Manag. 2007, 251, 10–21. [Google Scholar] [CrossRef]
- Hollaus, M.; Wagner, W.; Schadauer, K.; Maier, B.; Gabler, K. Growing stock estimation for alpine forests in Austria: A robust lidar-based approach. Can. J. For. Res. 2009, 39, 1387–1400. [Google Scholar] [CrossRef]
- Stanczyk, U. Feature Evaluation by Filter, Wrapper, and Embedded Approaches. Stud. Comput. Intell. 2015, 584, 29–44. [Google Scholar] [CrossRef]
- Long, J.; Lin, H.; Wang, G.; Sun, H.; Yan, E. Mapping Growing Stem Volume of Chinese Fir Plantation Using a Saturation-based Multivariate Method and Quad-polarimetric SAR Images. Remote Sens. 2019, 11, 1872. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Chen, Z.; Fu, L.; Tian, W.; Jiang, F.; Yi, J.; Du, Z.; Sun, H. Performance and Sensitivity of Individual Tree Segmentation Methods for UAV-LiDAR in Multiple Forest Types. Remote Sens. 2022, 14, 298. [Google Scholar] [CrossRef]
- Bonan, G. Forests and Climate Change: Forcings, Feedbacks, and the Climate Benefits of Forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [Green Version]
- Brockerhoff, E.; Hervé, J.; Parrotta, J.; Ferraz, S. Role of eucalypt and other planted forests in biodiversity conservation and the provision of biodiversity-related ecosystem services. For. Ecol. Manag. 2013, 301, 43–50. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, X.; Guo, Z. Estimation of tree height and aboveground biomass of coniferous forests in North China using stereo ZY-3, multispectral Sentinel-2, and DEM data. Ecol. Indic. 2021, 126, 107645. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.; Luque-Espinar, J.A.; Chica-Olmo, M.; Mendes, M. Feature selection approaches for predictive modelling of groundwater nitrate pollution: An evaluation of filters, embedded and wrapper methods. Sci. Total Environ. 2017, 624, 661–672. [Google Scholar] [CrossRef] [PubMed]
- Astola, H.; Häme, T.; Sirro, L.; Molinier, M.; Kilpi, J. Comparison of Sentinel-2 and Landsat 8 imagery for forest variable prediction in boreal region. Remote Sens. Environ. 2019, 223, 257–273. [Google Scholar] [CrossRef]
- Maltamo, M.; Malinen, J.; Packalen, P.; Suvanto, A.; Kangas, J. Nonparametric estimation of stem volume using airborne laser scanning, aerial photography, and stand-register data. Can. J. For. Res. 2006, 36, 426–436. [Google Scholar] [CrossRef]
- Shao, Y.; Lunetta, R. Comparison of support vector machine, neural network, and CART algorithms for the land-cover classification using limited training data points. ISPRS J. Photogramm. Remote Sens. 2012, 70, 78–87. [Google Scholar] [CrossRef]
- Dube, T.; Mutanga, O. Investigating the robustness of the new Landsat-8 Operational Land Imager derived texture metrics in estimating plantation forest aboveground biomass in resource constrained areas. ISPRS J. Photogramm. Remote Sens. 2015, 108, 12–32. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Ren, C.; Zhang, B.; Wang, Z. Optimal Combination of Predictors and Algorithms for Forest Above-Ground Biomass Mapping from Sentinel and SRTM Data. Remote Sens. 2019, 11, 414. [Google Scholar] [CrossRef] [Green Version]
- Esteban, J.; Mcroberts, R.; Fernández-Landa, A.; Tomé, J.; Nӕsset, E. Estimating Forest Volume and Biomass and Their Changes Using Random Forests and Remotely Sensed Data. Remote Sens. 2019, 11, 1944. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Remote Sensing Data | Acquisition Time | Band | Wavelength/(μm) | Resolution/(m) |
|---|---|---|---|---|
| GF-1 | 29 July 2016 | Blue | 0.45–0.52 | 8 |
| Green | 0.52–0.59 | 8 | ||
| Red | 0.63–0.69 | 8 | ||
| Near infrared | 0.77–0.89 | 8 | ||
| Panchromatic | 0.45–0.89 | 2 | ||
| Sentinel-2 | 1 November 2017 | Blue | 0.490 | 10 |
| Green | 0.560 | 10 | ||
| Red | 0.665 | 10 | ||
| Vegetation Red Edge | 0.705 | 20 | ||
| Vegetation Red Edge | 0.740 | 20 | ||
| Vegetation Red Edge | 0.783 | 20 | ||
| NIR | 0.842 | 10 | ||
| Vegetation Red Edge | 0.865 | 20 | ||
| SWIR | 1.610 | 20 | ||
| SWIR | 2.190 | 20 |
| Variable Type | Description | Reference |
|---|---|---|
| Spectral bands | GF-1: Blue, Green, Red, NIR | [33] |
| Sentinel-2: Blue, Green, Red, VRE1, VRE2, VRE3, NIR, Narrow NIR, Water Vapor, SWIR1, SWIR2 | [37] | |
| Vegetation indices | SAVI = (1 + L) × (NIR − RED)/(NIR + RED + L)(L = 0.5) | [43] |
| ARVI = [NIR − (2 × RED − BLUE)]/[NIR + (2 × RED − BLUE)] | [44] | |
| EVI = 2.5 × (NIR − RED)/(NIR + 6 × RED − 7.5 × BLUE + 1) | [45] | |
| TVI = | [31] | |
| MSR = (NIR/RED − 1)/(1) | [22] | |
| NLI = (NIR2 − RED)/(NIR2 + RED) | [30] | |
| DVIij = Bandi − Bandj | [37] | |
| RVIij = Bandi/Bandj | [23] | |
| NDVIij = (Bandi−Bandj)/(Bandi+Bandj) NDVIijk = (Bandi + Bandj −Bandk)/(Bandi + Bandj + Bandk) | [14] | |
| Texture features | Mean, Variance (VAR), Homogeneity (HOM), Contrast (CON), Dissimilarity (DIS), Entropy (ENT), Second Moment (SM), Correlation (COR) | [46] |
| GF-1 | Correlation Coefficient | Quadratic Model (m3/hm2) | Spherical Model (m3/hm2) | Sentinel-2 | Correlation Coefficient | Quadratic Model (m3/hm2) | Spherical Model (m3/hm2) |
|---|---|---|---|---|---|---|---|
| 3B1_ENT | −0.51 | 446.60 | 417.60 | NDVI568 | 0.50 | 444.02 | 343.82 |
| 3B1_DIS | −0.48 | 284.28 | 285.21 | NDVI368 | 0.49 | 342.89 | 309.16 |
| 3B1_SM | 0.48 | 474.54 | 474.54 | NDVI468 | 0.48 | 309.41 | 291.99 |
| 3B1_CON | −0.47 | 276.12 | 277.37 | NDVI268 | 0.47 | 418.92 | 340.28 |
| 3B1_HOM | 0.45 | 307.18 | 307.15 | NDVI58A8 | 0.47 | 382.43 | 322.14 |
| 3B2_ENT | −0.43 | 474.54 | 474.54 | RVI67 | 0.46 | 474.54 | 474.54 |
| 3B3_HOM | 0.42 | 474.54 | 474.54 | NDVI578 | 0.45 | 330.82 | 301.85 |
| 3B2_DIS | −0.41 | 298.22 | 297.90 | NDVI28A8 | 0.45 | 357.96 | 314.99 |
| 3B1_VAR | −0.41 | 240.78 | 249.22 | NDVI48A8 | 0.43 | 289.14 | 279.69 |
| 3B2_CON | −0.40 | 285.45 | 286.76 | 3B8_ENT | −0.42 | 283.17 | 278.36 |
| NO. | Pearson (r1) and Quadratic Model (r2) | Pearson (r1) and Spherical Model (r2) | ||||||
|---|---|---|---|---|---|---|---|---|
| Variable | PS1 | r1 | r2 | Variable | PS2 | r1 | r2 | |
| 1 | 3B1_ENT | 17.96 | 1 | 5 | 3B1_ENT | 18.93 | 1 | 5 |
| 2 | 3B1_SM | 19.70 | 3 | 4 | 3B3_HOM | 20.29 | 7 | 1 |
| 3 | 3B3_HOM | 20.10 | 7 | 1 | 3B1_SM | 20.48 | 3 | 4 |
| 4 | 3B2_ENT | 20.77 | 6 | 2 | 3B2_ENT | 24.46 | 6 | 3 |
| 5 | 3B1_HOM | 33.88 | 5 | 7 | 3B1_HOM | 35.24 | 5 | 7 |
| 6 | 3B1_DIS | 35.91 | 2 | 10 | 3B1_DIS | 37.86 | 2 | 10 |
| 7 | 3B2_SM | 43.30 | 14 | 3 | 3B2_SM | 40.58 | 14 | 2 |
| 8 | 3B1_CON | 43.87 | 4 | 11 | 3B2_DIS | 45.82 | 8 | 8 |
| 9 | 3B2_DIS | 44.26 | 8 | 8 | 3B1_CON | 46.01 | 4 | 11 |
| 10 | 3B2_HOM | 45.33 | 11 | 6 | 3B2_HOM | 46.50 | 11 | 6 |
| NO. | Pearson (r1) and Quadratic Model (r2) | Pearson (r1) and Spherical Model (r2) | ||||||
|---|---|---|---|---|---|---|---|---|
| Variable | PS1 | r1 | r2 | Variable | PS2 | r1 | r2 | |
| 1 | NDVI568 | 15.74 | 1 | 4 | NDVI568 | 15.03 | 1 | 4 |
| 2 | RVI67 | 24.90 | 6 | 3 | RVI67 | 24.37 | 6 | 3 |
| 3 | NDVI268 | 26.53 | 4 | 5 | NDVI268 | 25.65 | 4 | 5 |
| 4 | NDVI368 | 31.48 | 2 | 8 | NDVI368 | 30.07 | 2 | 8 |
| 5 | NDVI58A8 | 32.34 | 5 | 6 | NDVI58A8 | 31.28 | 5 | 6 |
| 6 | NDVI5128 | 33.24 | 12 | 1 | NDVI5128 | 33.06 | 12 | 1 |
| 7 | NDVI5118 | 34.05 | 11 | 2 | NDVI5118 | 33.70 | 11 | 2 |
| 8 | NDVI468 | 40.59 | 3 | 10 | NDVI468 | 38.83 | 3 | 10 |
| 9 | NDVI28A8 | 43.13 | 8 | 7 | NDVI28A8 | 41.89 | 8 | 7 |
| 10 | NDVI578 | 47.26 | 7 | 9 | NDVI578 | 45.67 | 7 | 9 |
| Data | Feature Selection Method | Optimal Feature Set |
|---|---|---|
| GF-1 | Pearson (5) | 3B1_ENT, 3B1_SM, 3B4_ENT, 3B4_HOM, 3B4_SM |
| Pearson and spherical model (7) | 3B1_ENT, 3B1_DIS, 3B1_SM, 3B1_CON, 3B1_HOM, 3B2_ENT, 3B3_HOM | |
| Pearson and quadratic model (7) | 3B1_ENT, 3B1_DIS, 3B1_SM, 3B1_CON, 3B1_HOM, 3B2_ENT, 3B3_HOM | |
| Sentinel-2 | Pearson (7) | NDVI568, NDVI368, NDVI6128, NDVI285, 3B8_ENT, 3B8_SM, RVI85 |
| Pearson and spherical model (4) | 3B8_ENT, 3B8_SM, NDVI5118, NDVI5128 | |
| Pearson and quadratic model (4) | 3B8_ENT, 3B8_SM, NDVI5118, NDVI5128 |
| GF-1 | Sentinel-2 | ||||||
|---|---|---|---|---|---|---|---|
| Criteria | Model | R2 | RMSE (m3/hm2) | rRMSE (%) | R2 | RMSE (m3/hm2) | rRMSE (%) |
| Pearson correlation | MLR | 0.43 | 65.13 | 32.96 | 0.24 | 73.96 | 35.87 |
| KNN | 0.32 | 70.51 | 34.19 | 0.31 | 71.03 | 34.95 | |
| SVM | 0.45 | 64.23 | 32.57 | 0.38 | 63.17 | 30.64 | |
| RF | 0.29 | 71.79 | 34.82 | 0.23 | 82.72 | 36.53 | |
| Proposed method | MLR | 0.44 | 62.11 | 30.91 | 0.38 | 74.91 | 33.28 |
| KNN | 0.38 | 66.48 | 33.08 | 0.47 | 58.09 | 28.17 | |
| SVM | 0.47 | 60.82 | 30.27 | 0.52 | 55.62 | 26.65 | |
| RF | 0.49 | 58.67 | 28.67 | 0.45 | 62.22 | 30.18 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, H.; Zhao, W.; Long, J.; Liu, Z.; Yang, P.; Zhang, T.; Ye, Z.; Wang, Q.; Matinfar, H.R. Mapping Forest Growing Stem Volume Using Novel Feature Evaluation Criteria Based on Spectral Saturation in Planted Chinese Fir Forest. Remote Sens. 2023, 15, 402. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15020402
Lin H, Zhao W, Long J, Liu Z, Yang P, Zhang T, Ye Z, Wang Q, Matinfar HR. Mapping Forest Growing Stem Volume Using Novel Feature Evaluation Criteria Based on Spectral Saturation in Planted Chinese Fir Forest. Remote Sensing. 2023; 15(2):402. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15020402
Chicago/Turabian StyleLin, Hui, Wanguo Zhao, Jiangping Long, Zhaohua Liu, Peisong Yang, Tingchen Zhang, Zilin Ye, Qingyang Wang, and Hamid Reza Matinfar. 2023. "Mapping Forest Growing Stem Volume Using Novel Feature Evaluation Criteria Based on Spectral Saturation in Planted Chinese Fir Forest" Remote Sensing 15, no. 2: 402. https://0-doi-org.brum.beds.ac.uk/10.3390/rs15020402