
FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment



Abstract
:
1. Introduction
- (1)
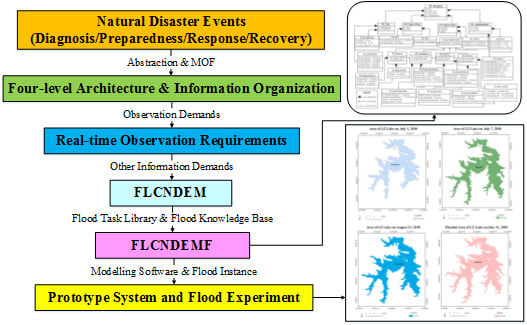
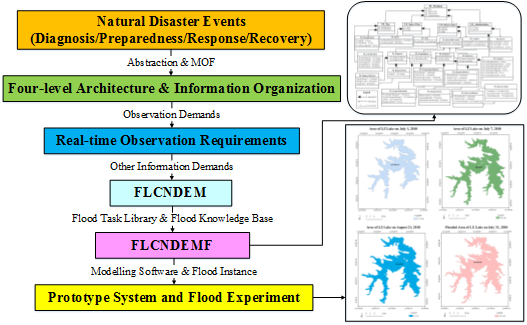
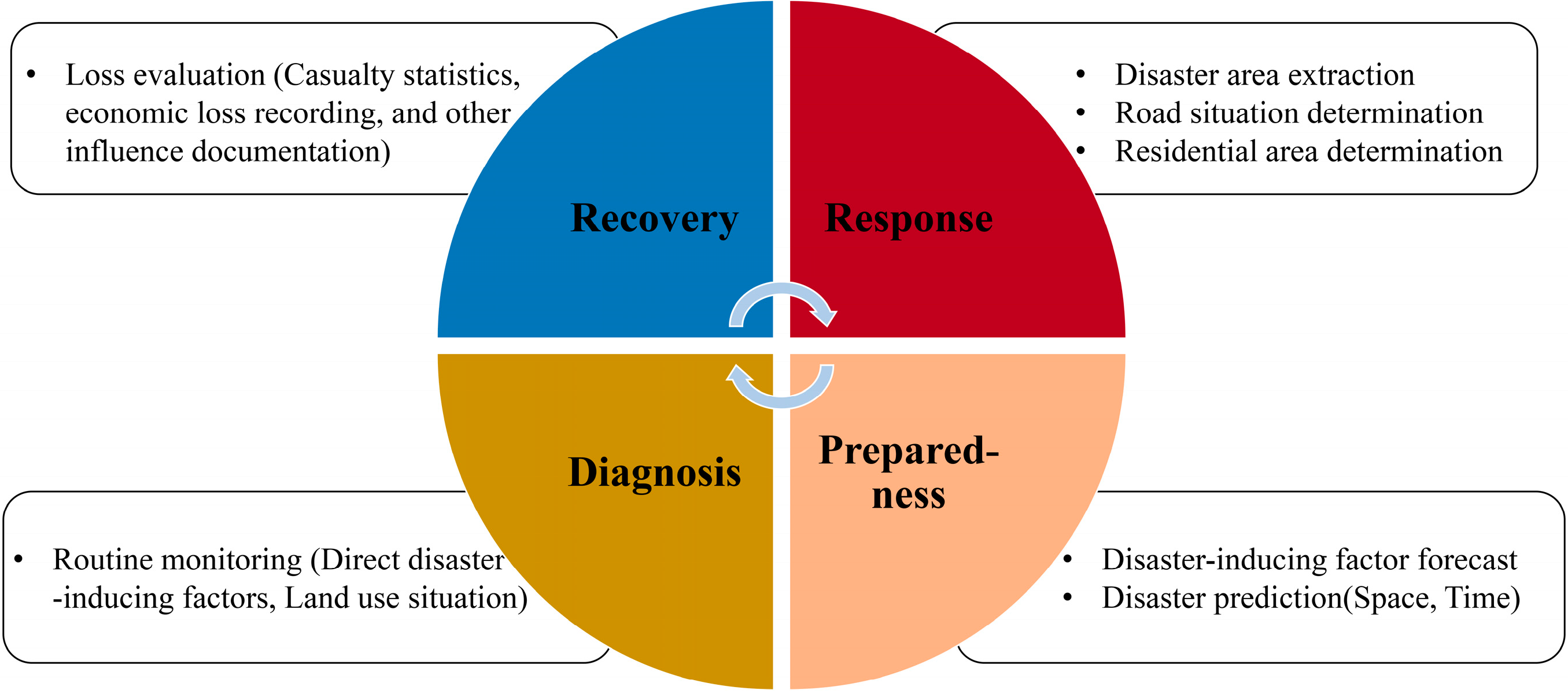
- Covering information demands from all emergency phases. It is far from enough to just provide information for one or two emergency phases. Only with full life cycle information support, can the disaster be probably avoided, predicted, effectively responded to, or rapidly recovered. Here full life cycle refers to covering all the occurrence and development phases of events.
- (2)
- Providing observation support. Knowing what missions should be done during emergency is important, and candidate dataset for completing the missions is even more important. Therefore, both missions and candidate dataset for each mission should be included in the event model.
2. FLCNDEM
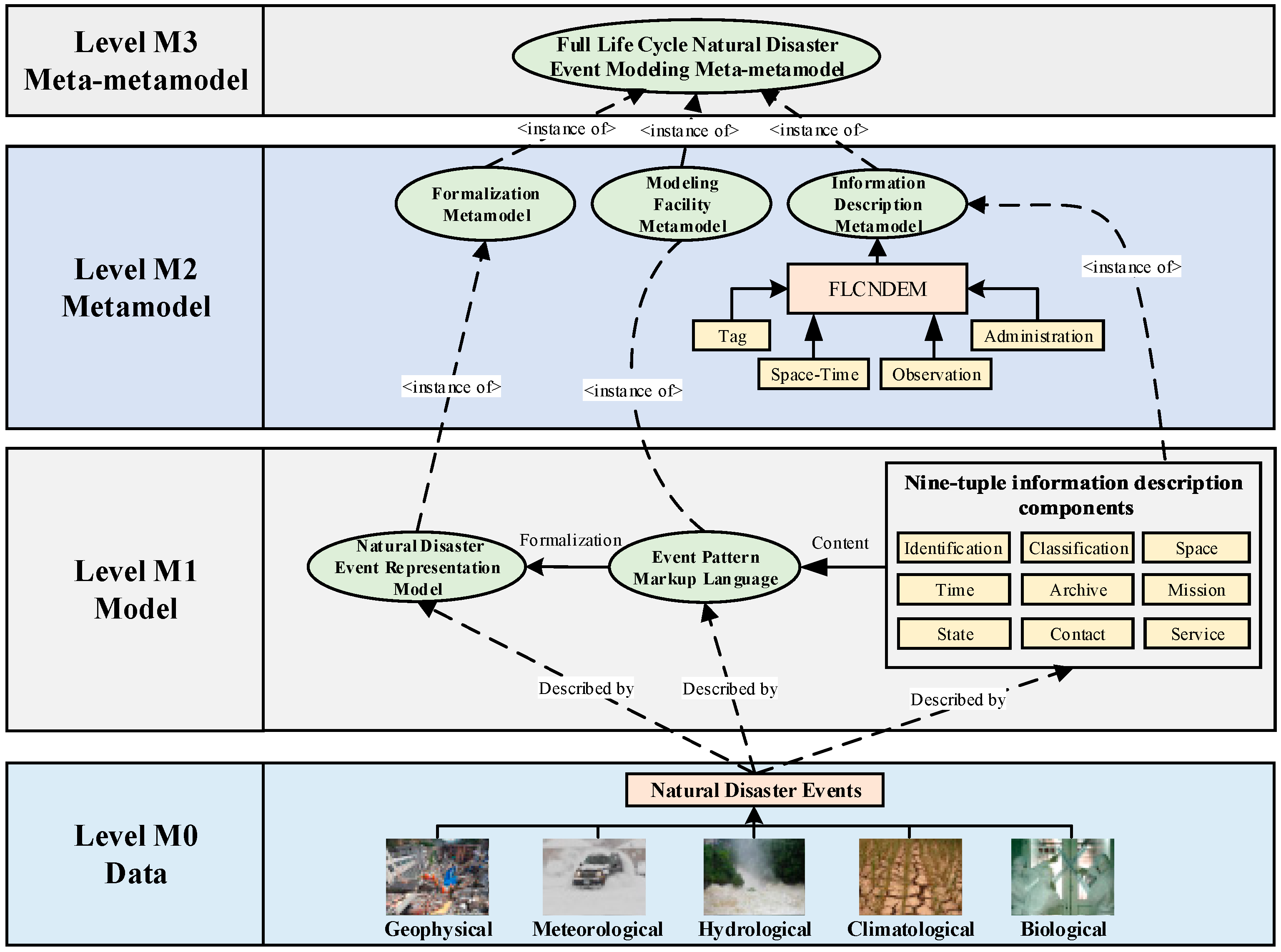
2.1. Meta-Object Facility for NDE

2.2. Information Organization of FLCNDEM
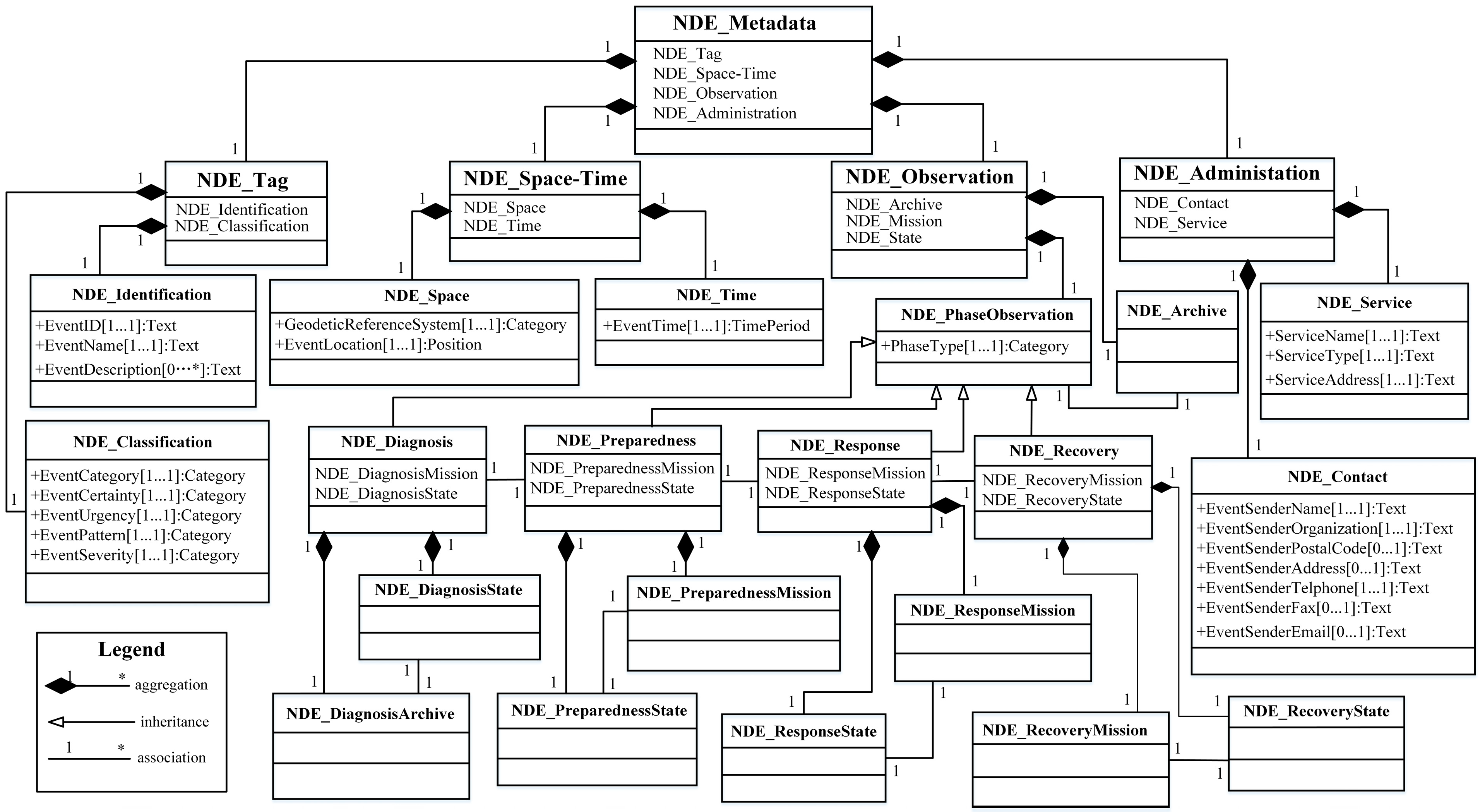
- (1)
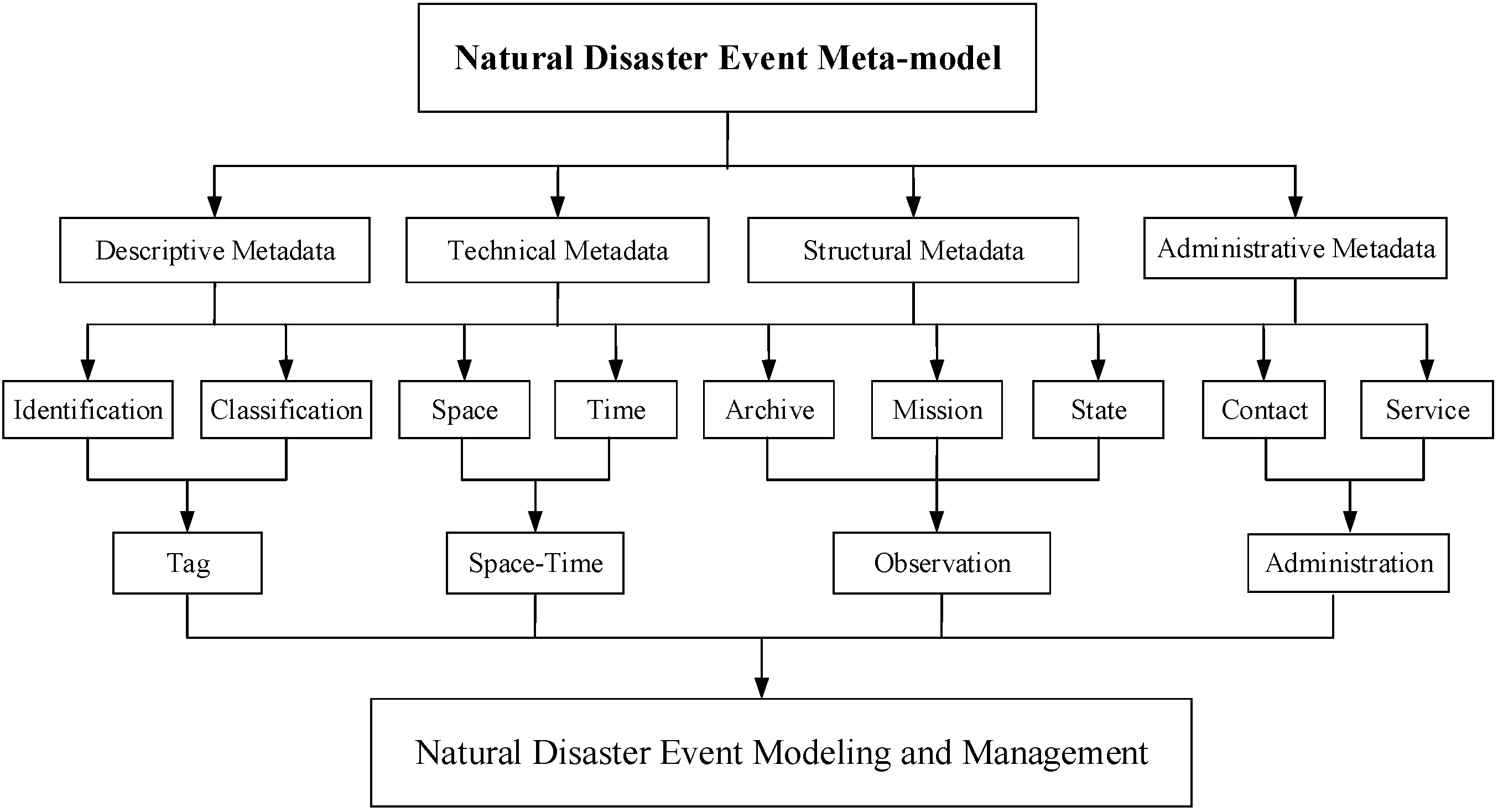
- Tag: Tag information is composed of the identification information and the classification information. Identification information is used to describe the event ID, name, and other identity elements. Classification is for the description of event types under different classification criteria and could help in the event query and discovery. Once the event type is decided, the corresponding observations are determined.
- (2)
- Space-Time: Space-Time information includes space information and time information, which are designed to represent the spatial and temporal aspects of NDE, respectively.
- (3)
- Observation: Observation information is divided into archive, mission, and state information. All these three kinds of information vary with the event type and phase.
- (4)
- Administration: Administration information consists of contact information and service information. Contact information is applied to record the information of the event sender, and service information is for keeping track of the information about the event service.

2.3. Observation Needs from Different Event Stages

2.4. Contents of FLCNDEM

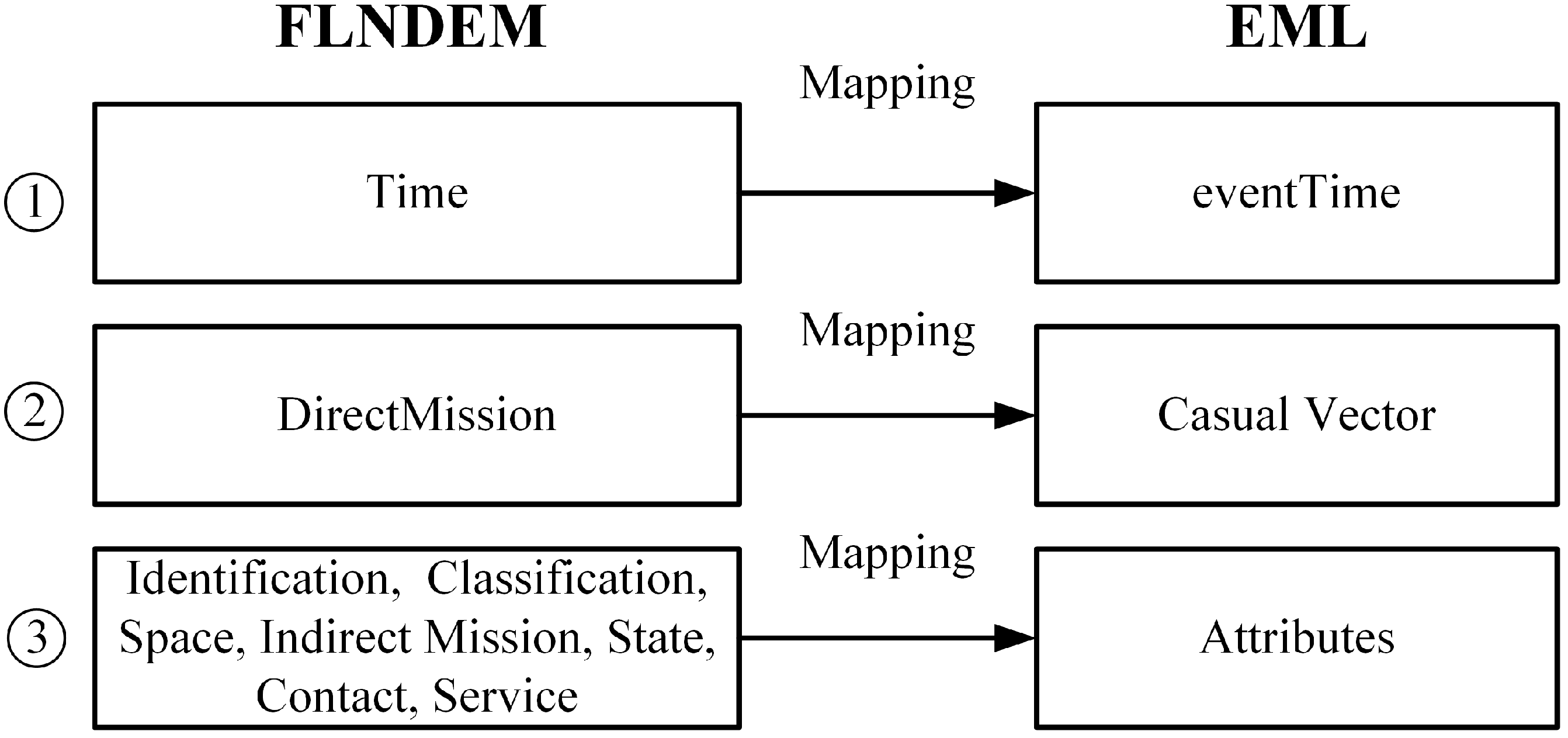
2.5. Formalization of FLCNDEM

3. System Implementation
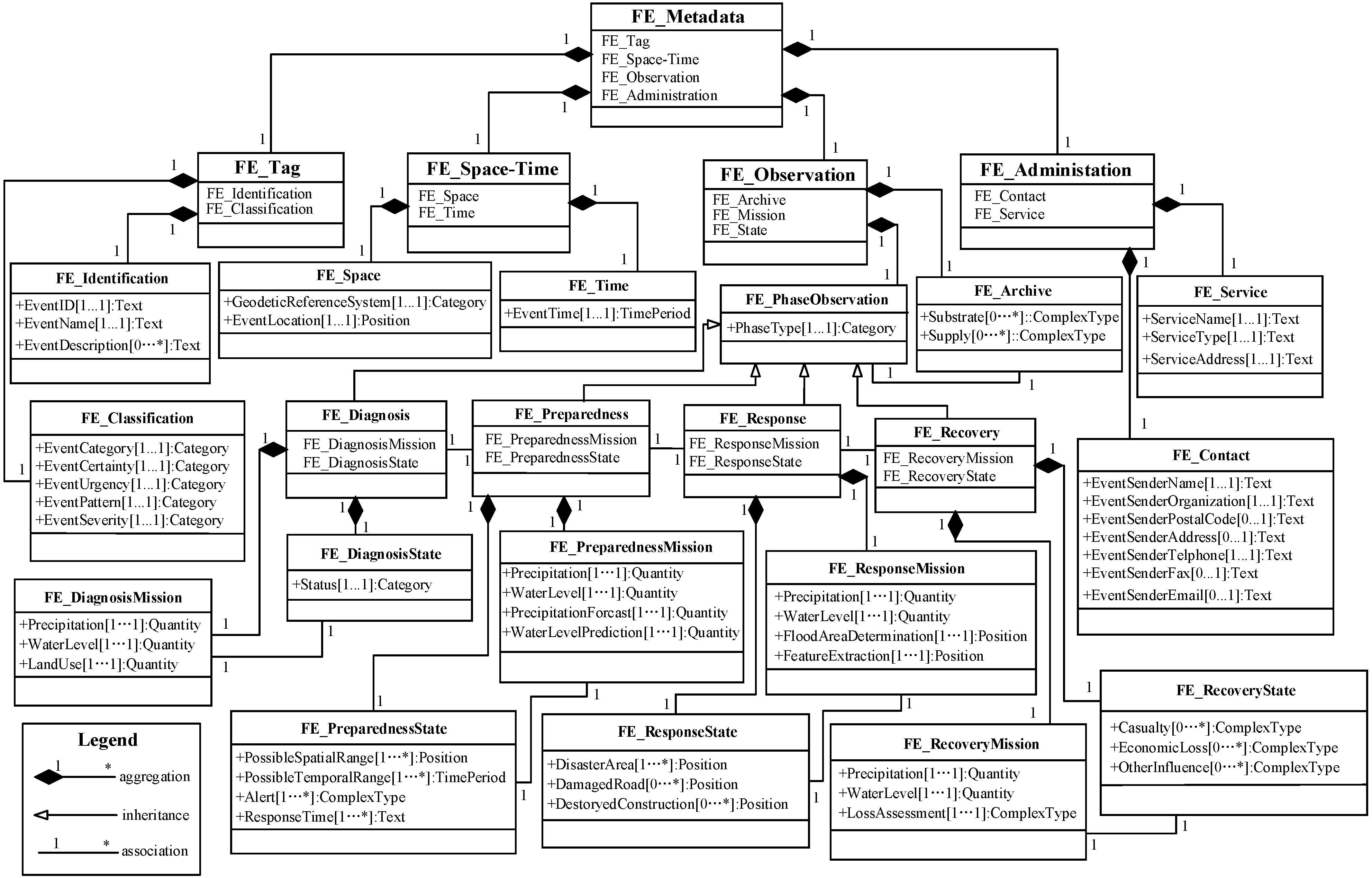
3.1. FLCNDEM for Floods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Mission | State |
|---|---|---|
| Diagnosis | Precipitation Statistics Water Level Determination Land Use | Status |
| Preparedness | Precipitation Statistics Water Level Determination Precipitation Forecast Water Level Prediction | Possible Spatial Range Possible Temporal Range Flood Alert |
| Response | Precipitation Statistics Water Level Determination Flooded Area Determination Feature Extraction | Flooded Area Damaged Road Destroyed Construction |
| Recovery | Precipitation Statistics Water Level Determination Loss Assessment | Casualty Economic Loss Other influence |

| Mission | Satellite | Sensor |
|---|---|---|
| Precipitation Monitoring | GOES-13, GOES-14, GOES-15 | Imager |
| Nimbus5/Nimbus6 | ESMR | |
| Seadsat/Nimbus7 | SMMR | |
| DMSP-F8/DMSP-F10/DMSP-F11/DMSP-F12 | SSM/I | |
| TRMM | TMI/PR/VIRS | |
| CMORPH | SSM/I/AMSU-B/TMI | |
| EOS(Terra/Aqua) | MODIS | |
| GMS-5 | Moisture sensor | |
| NOAA-K | AVHRR | |
| GPM | DPR/GMI | |
| FY-2C | VISSR | |
| FY-3C | VIRR/MWTS/MWHS/MWRI |
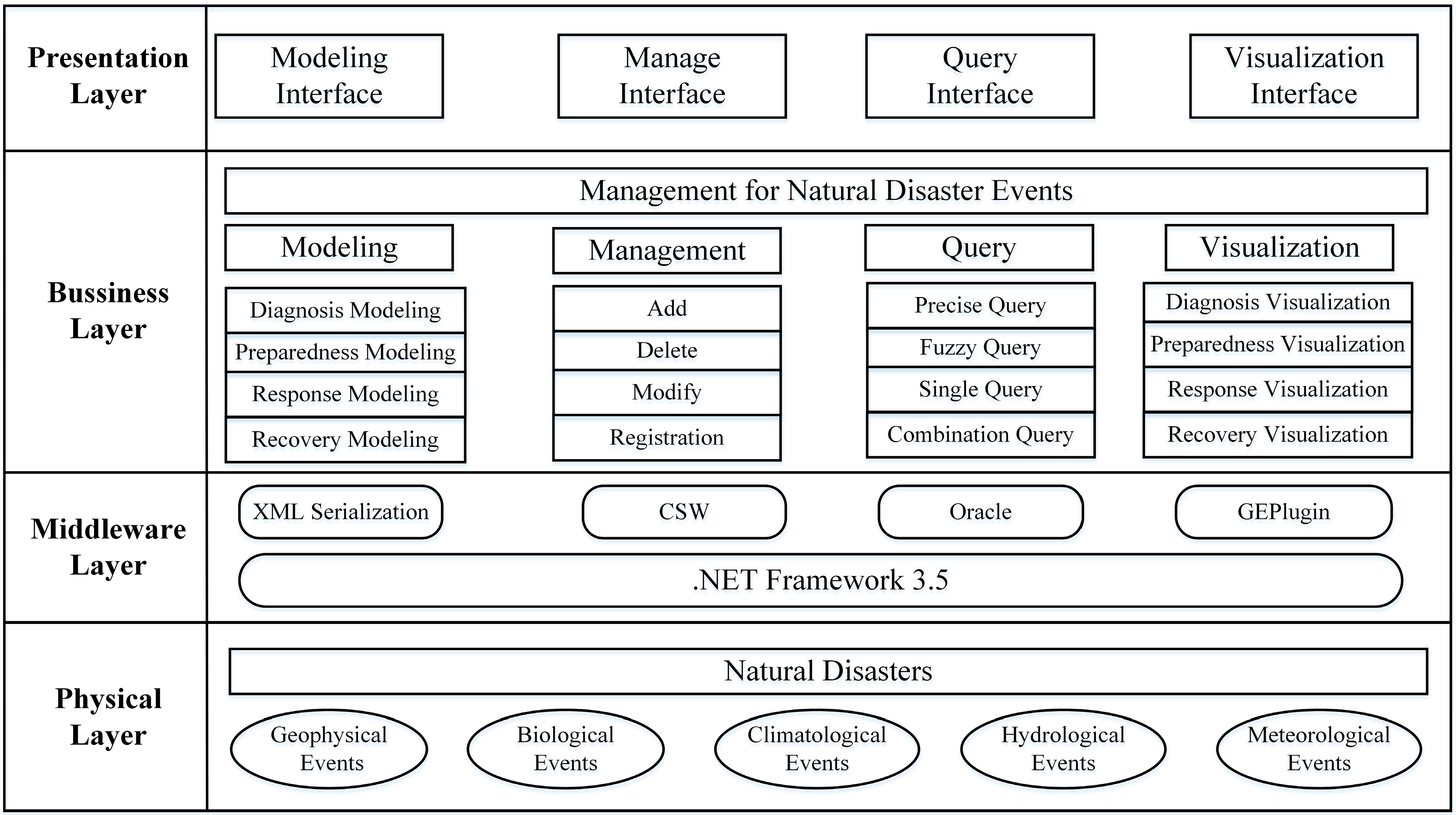
3.2. System Architecture and Components

4. Experiment
4.1. LZ Lake Flood Scenario
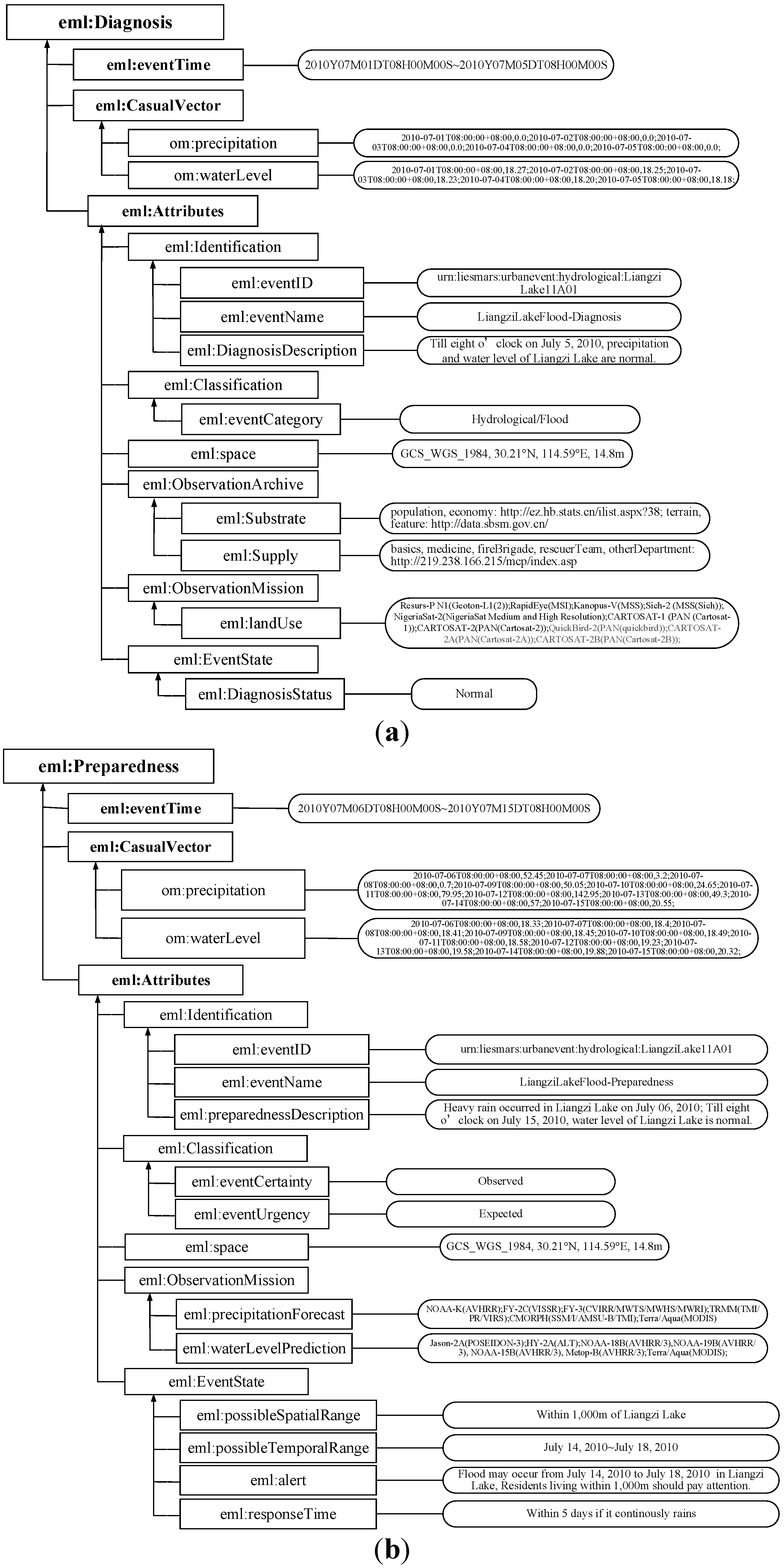
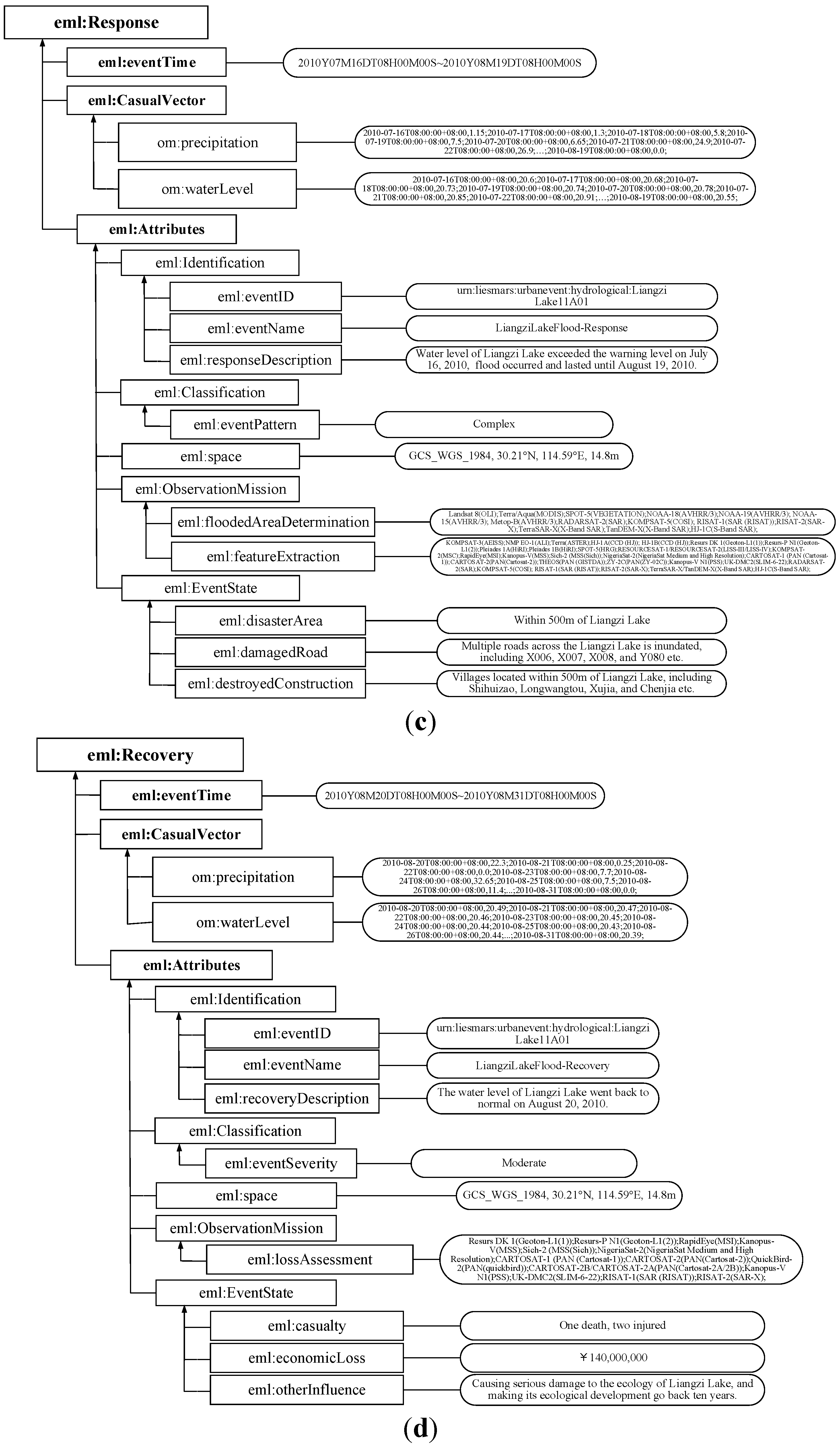
4.2. Phase-Based LZ Lake Flood Event Modeling



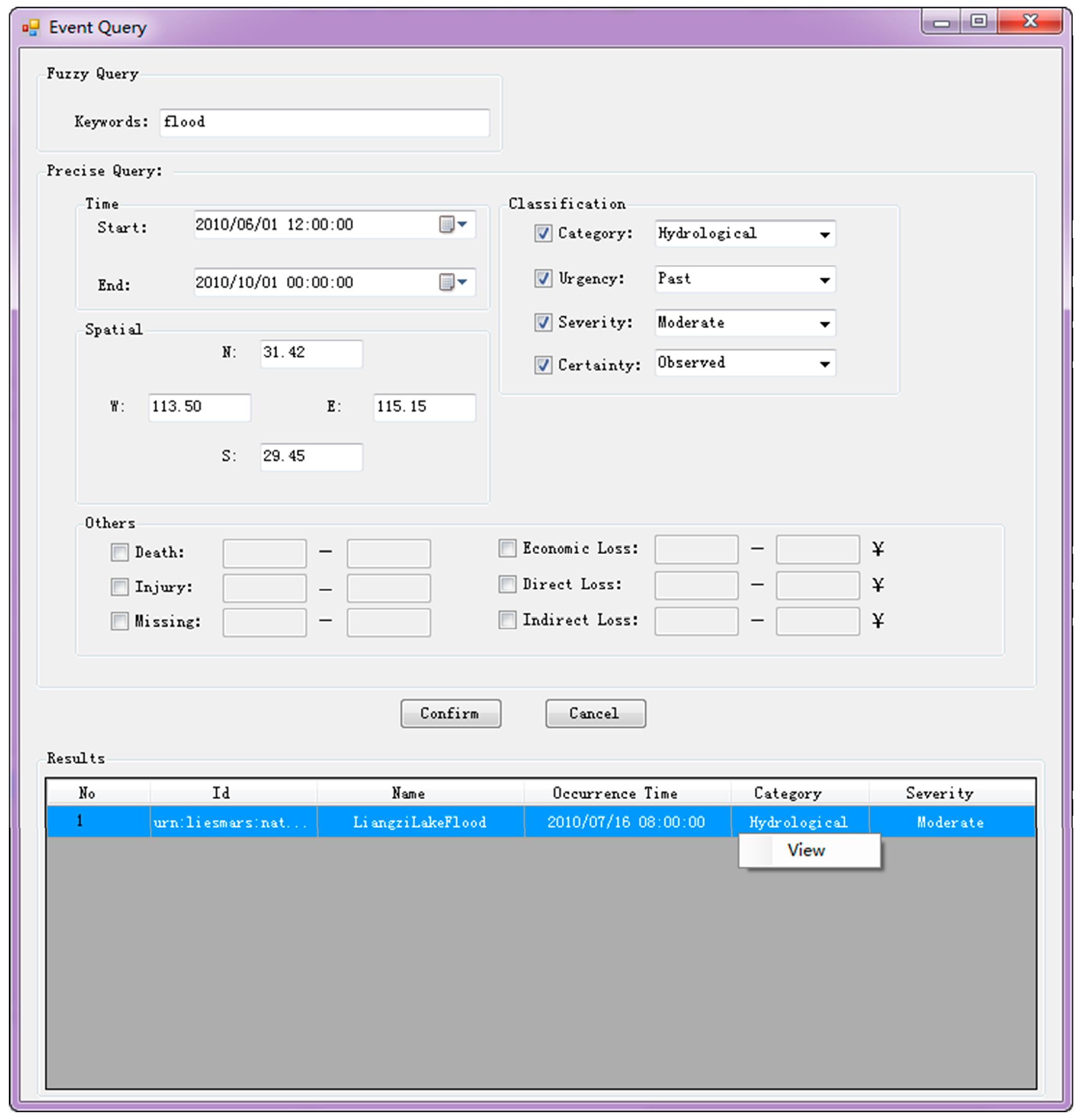
4.3. Flood Process Registration and Query

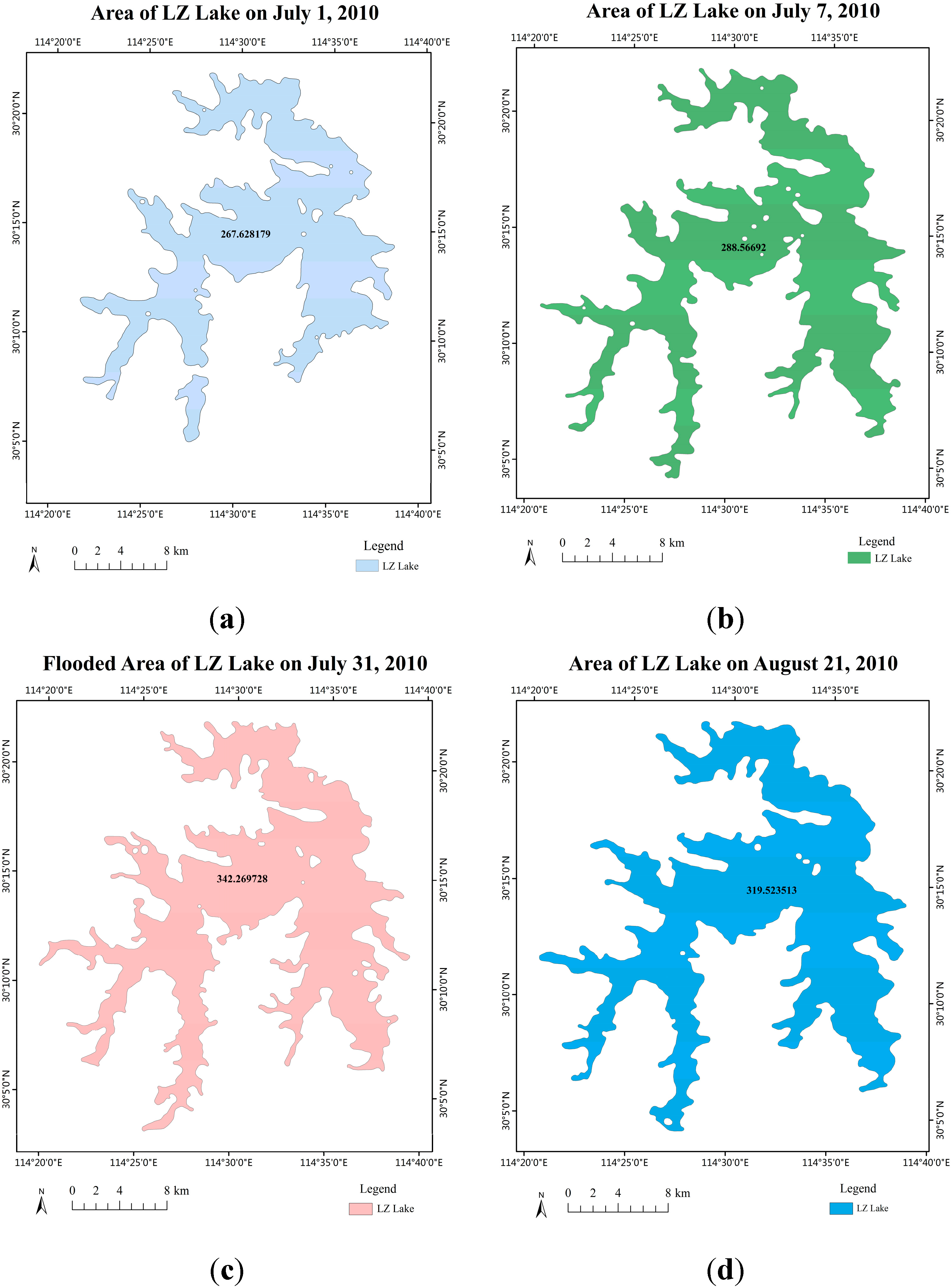
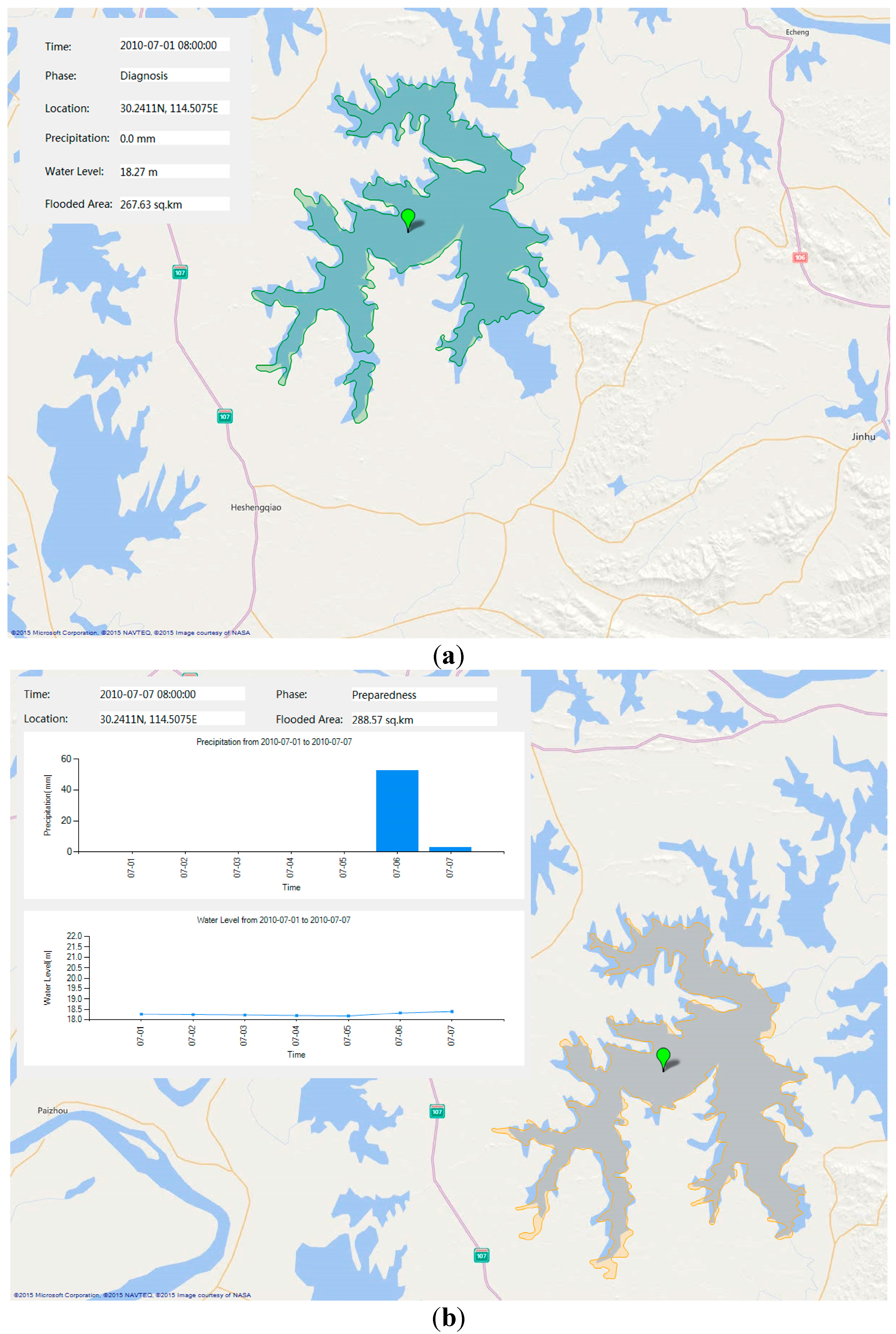
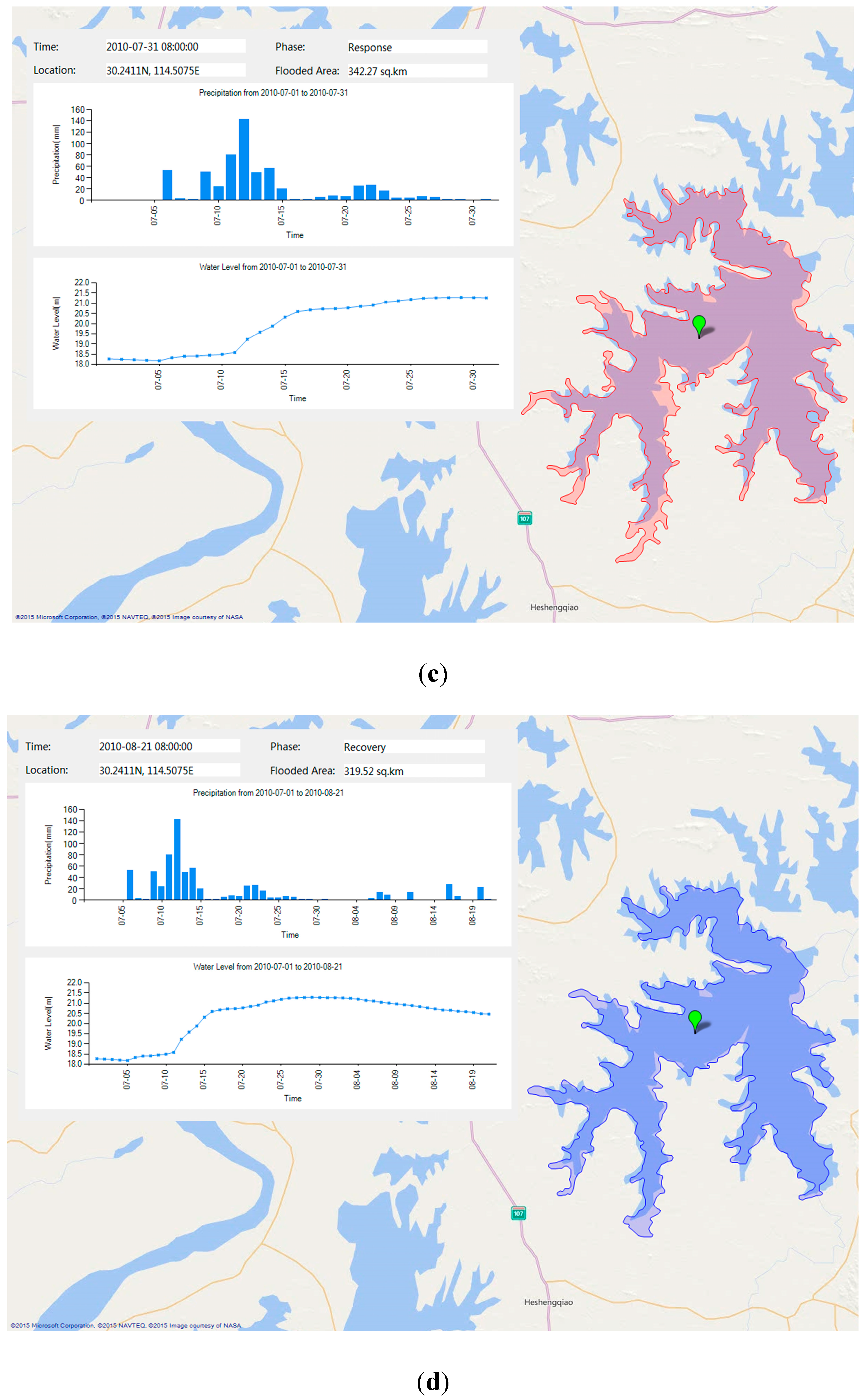
4.4. Flood Process Visualization
5. Discussion


5.1. All-Stage Dynamic Information Support for Disasters
5.2. Information Management for Disasters
5.3. Other Environmental Applications
6. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guha-Sapir, D.; Hoyois, P.; Belo, R. Annual Disaster Statistical Review 2012: The Numbers and Trends; CRED: Brussels, Belgium, 2013. [Google Scholar]
- Lee, E.A. The past, present and future of cyber-physical systems: A focus on models. Sensors 2015, 15, 4837–4869. [Google Scholar] [CrossRef] [PubMed]
- Jones, E.; Botterell, A. Common Alerting Protocol (Version 1.1); OASIS: Burlington, MA, USA, 2005. [Google Scholar]
- Raymond, M.; Webb, S.; Aymond, P.I. Emergency Data Exchange Language (EDXL) Distribution Element (Version 1.0); OASIS: Burlington, MA, USA, 2006. [Google Scholar]
- Aymond, P.; Brooks, R.; Grapes, T.; Ham, G.; Iannella, R.; Robinson, K.; Joerg, W.; Triglia, A. Emergency Data Exchange Language Resource Messaging (EDXL-RM) (Version 1.0); OASIS: Burlington, MA, USA, 2009. [Google Scholar]
- Iannella, R.; Robinson, K. Tsunami Warning Markup Language (TWML) (Version 1.0); National ICT Australia: Sydney, Australia, 2006. [Google Scholar]
- Sun, S.; Iannella, R.; Robinson, K. Cyclone Warning Markup Language (CWML) (Version 1.0); National ICT Australia: Sydney, Australia, 2006. [Google Scholar]
- Babaie, H.A.; Babaei, A. Developing the earthquake markup language and database with UML and XML schema. Comput. Geosci. 2005, 31, 1175–1200. [Google Scholar] [CrossRef]
- Othman, S.H.; Beydoun, G.; Sugumaran, V. Development and validation of a disaster management metamodel. Inf. Process. Manag. 2014, 50, 235–271. [Google Scholar] [CrossRef]
- Othman, S.H.; Beydoun, G. Model—Driven disaster management. Inf. Manag. 2013, 50, 218–228. [Google Scholar] [CrossRef]
- ReliefWeb. Available online: http://sites.tufts.edu/jha/files/2011/04/a193.pdf (accessed on 12 February 2015).
- W3C Incubator Group Report. Available online: http://www.w3.org/2005/Incubator/eiif/XGR-Framework-20090806/#ack (accessed on 6 December 2014).
- Scherp, A.; Franz, T.; Saathoff, C.; Staab, S. F—A model of events based on the foundational ontology dolce + DnS ultralight. In Proceedings of the Fifth International Conference on Knowledge Capture, ACM, New York, NY, USA, 1–4 September 2009.
- Kruchten, P.; Monu, C.W.; Sotoodeh, M. A conceptual model of disasters encompassing multiple stakeholder domains. Int. J. Emerg. Manag. 2008, 5, 25–56. [Google Scholar] [CrossRef]
- Sanjay, J.; McLean, C. A framework for modeling and simulation for emergency response. In Proceedings of the 2003 Winter Simulation Conference, New Orleans, LA, USA, 7–10 December 2003.
- Malizia, A.; Onorati, T.; Díaz, P.; Aedo, I.; Astorga-Paliza, F. SEMA4A: An ontology for emergency notification systems accessibility. Expert Syst. Appl. 2010, 37, 3380–3391. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, L.; Nunamaker, J.F., Jr. A knowledge management framework for the support of decision making in humanitarian assistance/disaster relief. Knowl. Inf. Syst. 2002, 4, 370–385. [Google Scholar] [CrossRef]
- HernaÂndez, J.Z.; Serrano, J.M. Knowledge-based models for emergency management systems. Expert Syst. Appl. 2001, 20, 173–186. [Google Scholar] [CrossRef]
- Cheng, M.; HoKo, C. Computer-Aided DSS for Hillside Safety Monitoring. Autom. Constr. 2002, 11, 453–466. [Google Scholar] [CrossRef]
- Slobodan, S.; Sajjad, A. Computer-based model for flood evacuation emergency planning. Nat. Hazards 2005, 34, 25–51. [Google Scholar]
- Laniak, G.F.; Olchin, G.; Goodall, J.; Voinov, A.; Hill, M.; Glynn, P.; Whelan, G.; Geller, G.; Quinn, N.; Blind, M.; et al. Integrated environmental modeling: A vision and roadmap for the future. Environ. Model. Softw. 2013, 39, 3–23. [Google Scholar] [CrossRef] [Green Version]
- Laniak, G.F.; Rizzoli, A.E.; Voinov, A. Thematic issue on the future of integrated modeling science and technology preface. Environ. Model. Softw. 2013, 39, 1–2. [Google Scholar] [CrossRef]
- Bulatewicz, T.; Allen, A.; Peterson, J.M.; Staggenborg, S.; Welch, S.M.; Steward, D.R. The simple script wrapper for OpenMI: Enabling interdisciplinary modeling studies. Environ. Model. Softw. 2013, 39, 283–294. [Google Scholar] [CrossRef]
- Chen, N.; Wang, K.; Xiao, C.; Gong, J. A heterogeneous sensor web node meta-model for the management of a flood monitoring system. Environ. Model. Softw. 2014, 54, 222–237. [Google Scholar] [CrossRef]
- Akbar, M.; Aliabadi, S.; Patel, R.; Watts, M. A fully automated and integrated multi-scale forecasting scheme for emergency preparedness. Environ. Model. Softw. 2013, 39, 24–38. [Google Scholar] [CrossRef]
- Delin, K.; Jackson, S.; Some, R. Sensor webs. NASA Tech Briefs 1999, 23, 80. [Google Scholar]
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- Everding, T.; Echterhoff, J. Event Pattern Markup Language (EML) (Version: 0.3.0) 08-132; Open Geospatial Consortium: Wayland, MA, USA, 2008. [Google Scholar]
- Chen, N.C.; Hu, C. A Sharable and interoperable meta-model for atmospheric satellite sensors and observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1519–1530. [Google Scholar] [CrossRef]
- OMG’s MetaObject Facility. Available online: http://www.omg.org/mof/ (accessed on 12 August 2014).
- Overbeek, J.F. Meta Object Facility (MOF): Investigation of the State of the Art. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2006. [Google Scholar]
- ISO Standard. Available online: http://www.iso.org/iso/iso_catalogue/catalogue_tc/catalogue_detail.htm?csnumber=32554 (accessed on 18 August 2014).
- Fan, M.H.; Fan, H.; Chen, N.C.; Chen, Z.Q.; Du, W. Active on-demand service method based on event-driven architecture for geospatial data retrieval. Comput. Geosci. 2013, 56, 1–11. [Google Scholar] [CrossRef]
- Chen, N.C.; Zhang, X. A dynamic observation capability index for quantitatively pre-evaluating diverse optical imaging satellite sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 515–530. [Google Scholar] [CrossRef]
- Vallado, D.A.; Crawford, P.; Hujsak, R.; Kelso, T.S. Revisiting Spacetrack Report No. 3. In Proceedings of the AAIA/AAS Astrodynamics Specialist Conference, Keystone, CO, USA, 21–24 August 2006.
- Chen, N.C.; Di, L.P.; Yu, G.N.; Min, M. A flexible geospatial sensor observation service for diverse sensor data based on web service. ISPRS J. Photogramm. Remote Sens. 2009, 64, 234–242. [Google Scholar] [CrossRef]
- Chen, N.; Wang, X.; Yang, X. A direct registry service method for sensors and algorithms based on the process model. Comput. Geosci. 2013, 56, 45–55. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, N.; Du, W.; Song, F.; Chen, Z. FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment. Remote Sens. 2015, 7, 7231-7256. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70607231
Chen N, Du W, Song F, Chen Z. FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment. Remote Sensing. 2015; 7(6):7231-7256. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70607231
Chicago/Turabian StyleChen, Nengcheng, Wenying Du, Fan Song, and Zeqiang Chen. 2015. "FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment" Remote Sensing 7, no. 6: 7231-7256. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70607231