
Spatial Variability Mapping of Crop Residue Using Hyperion (EO-1) Hyperspectral Data

Abstract
:
1. Introduction
2. Material and Methods
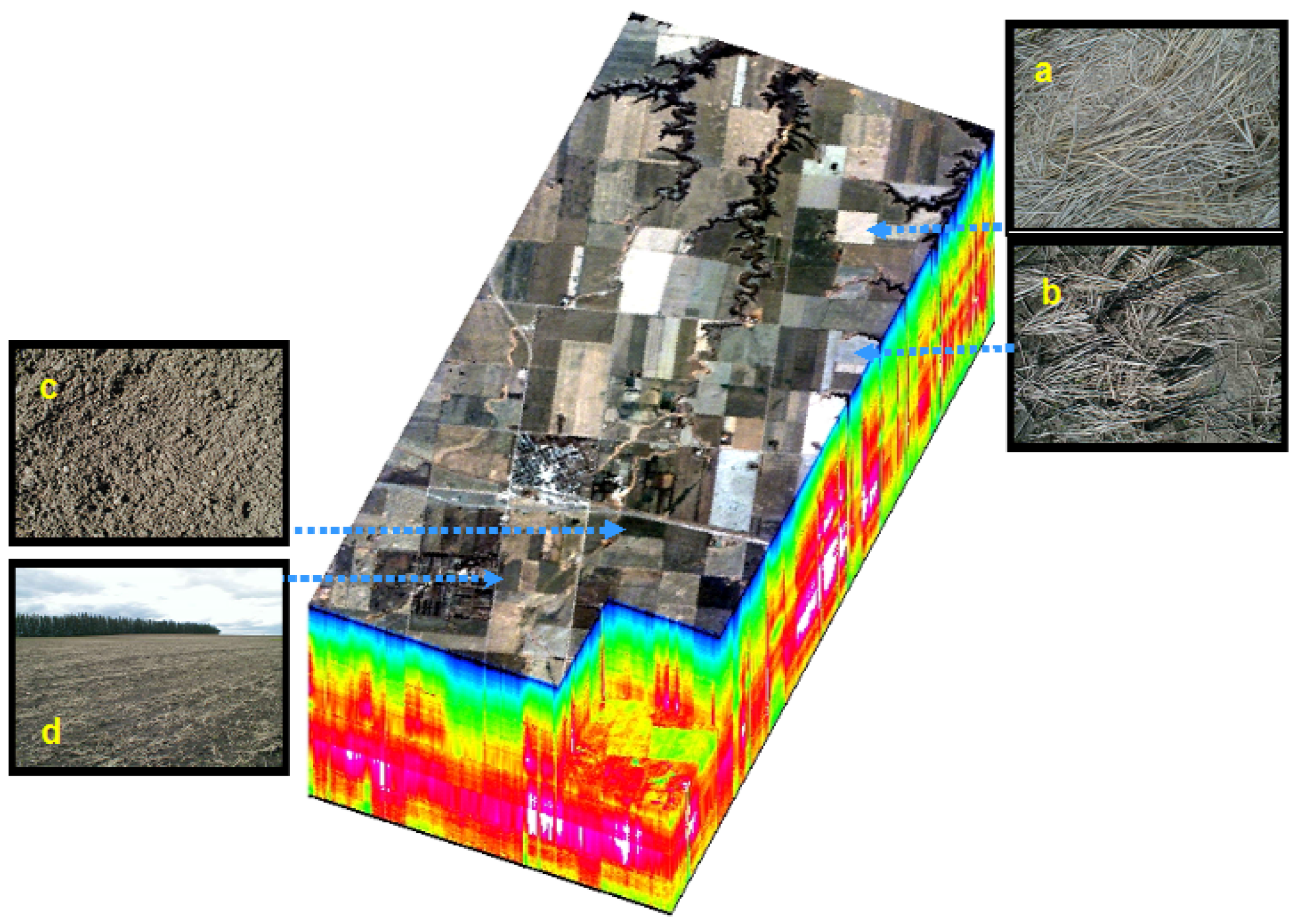
2.1. Study Site


2.2. Image Data Acquisition
2.3. Image Data Pre-Processing
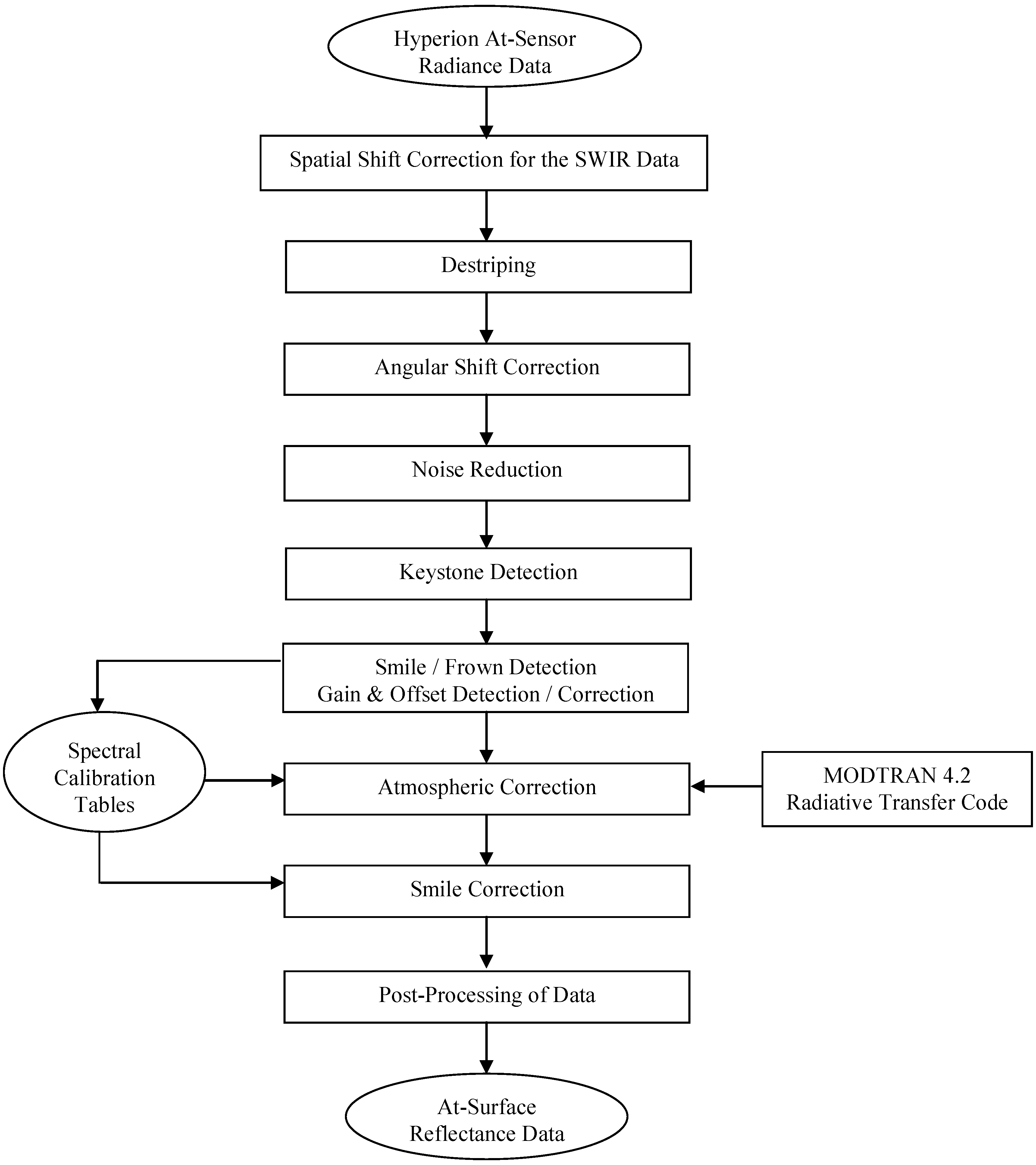
2.3.1. Radiometric and Spectral Calibration

2.3.2. Surface Reflectance Retrieval

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date of over flight | 20 May 2002 |
| Time of over flight (GMT) | 17:42:36 |
| Solar zenith angle | 33.3536° |
| Solar azimuth angle | 149.7354° |
| Atmospheric model | Mid-latitude summer |
| Aerosol model | Continental (rural) |
| Terrain elevation (ASL) | 0.579 km |
| Horizontal visibility | 23 km |
| Water vapour | 1.5–2.5 mg/cm2 |
| CO2 mixing ratio | 365 ppm (as per model) |
2.3.3. Image Geo-Referencing
2.4. Ground-Data Acquisition
2.5. Image Processing
2.5.1. Ground-Photo Classification
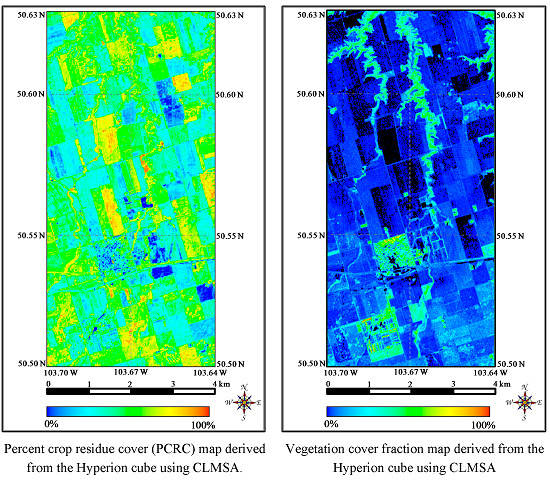
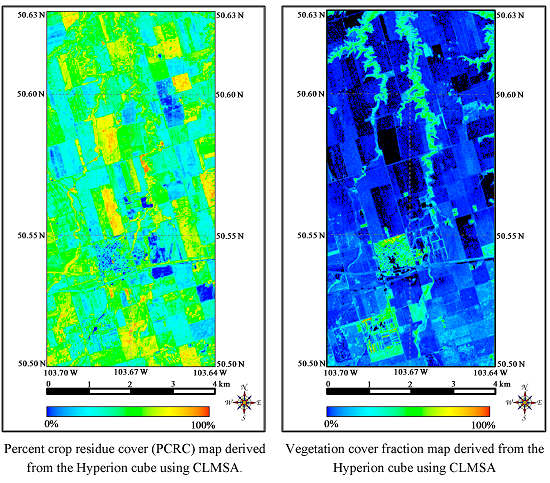
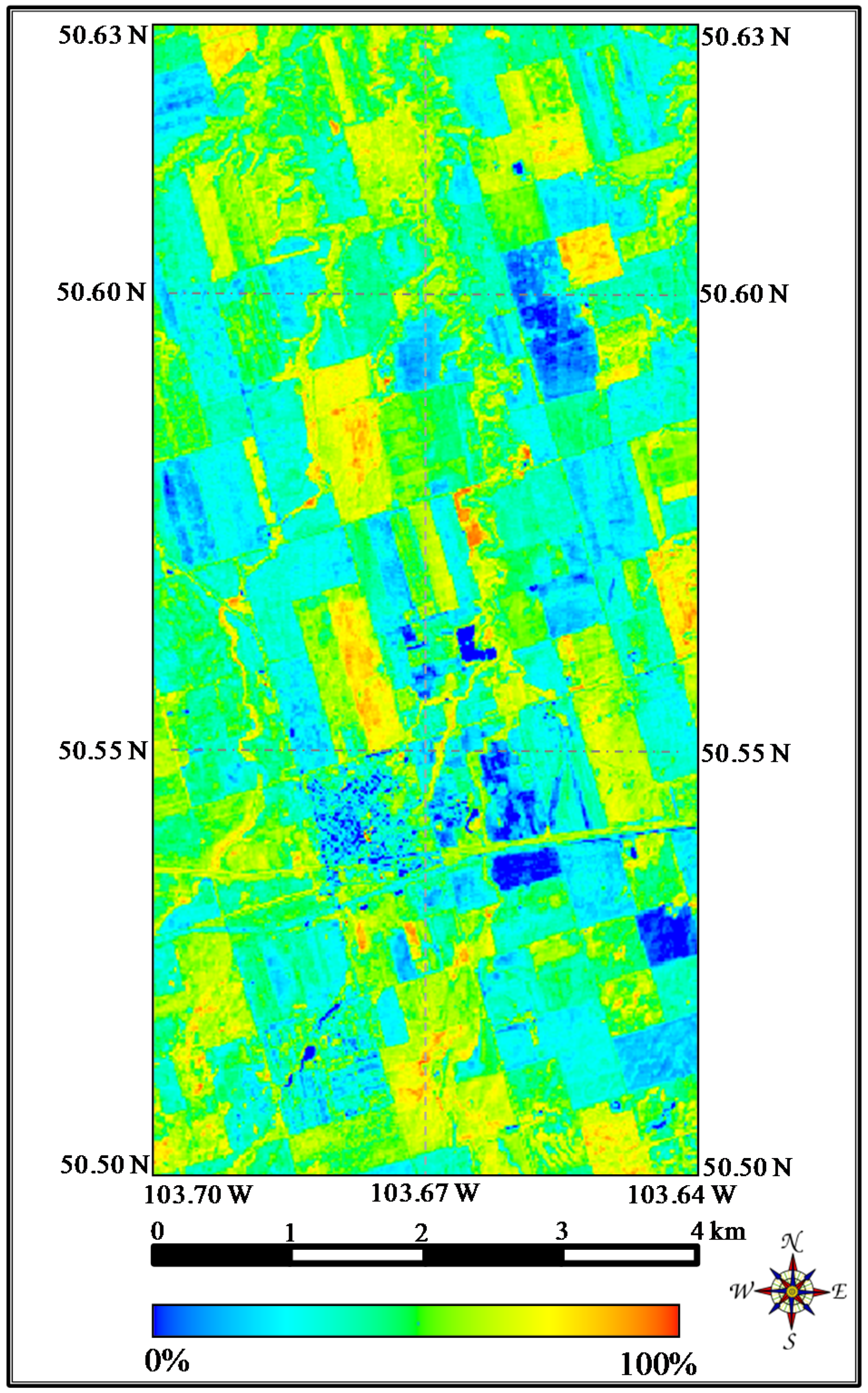
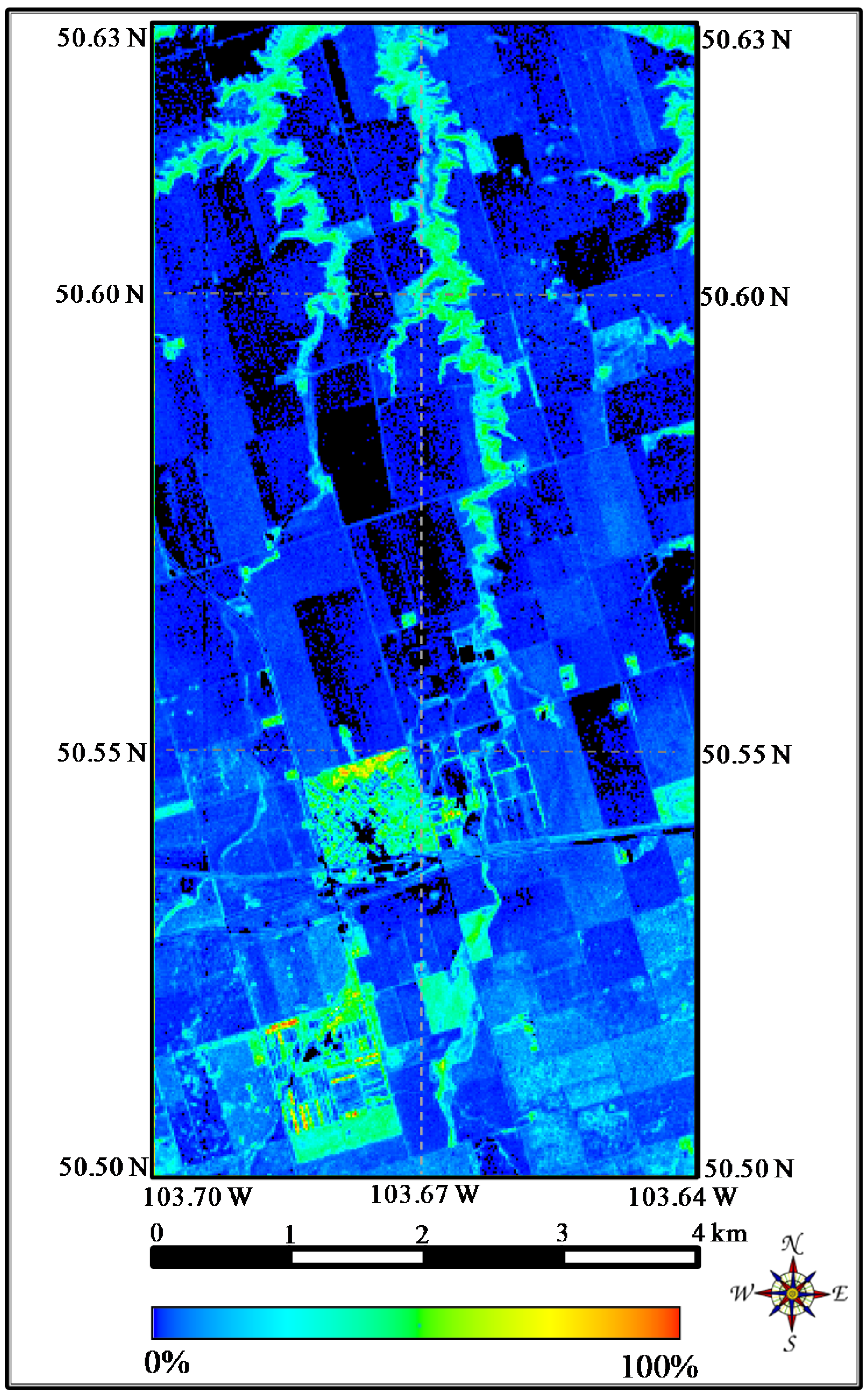
2.5.2. Constrained Linear Spectral Mixture Analysis (CLMSA)
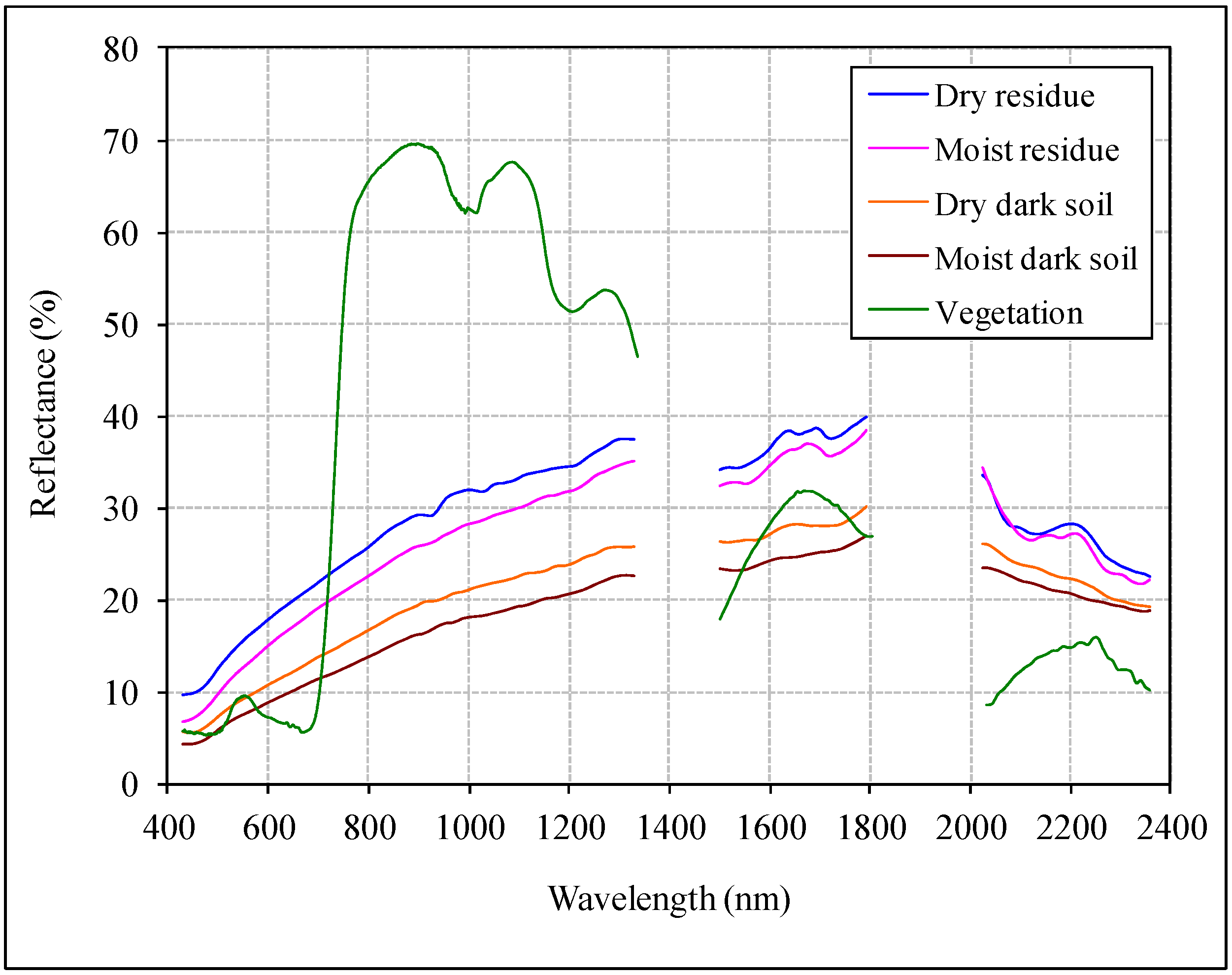
2.5.3. Endmember Measurement
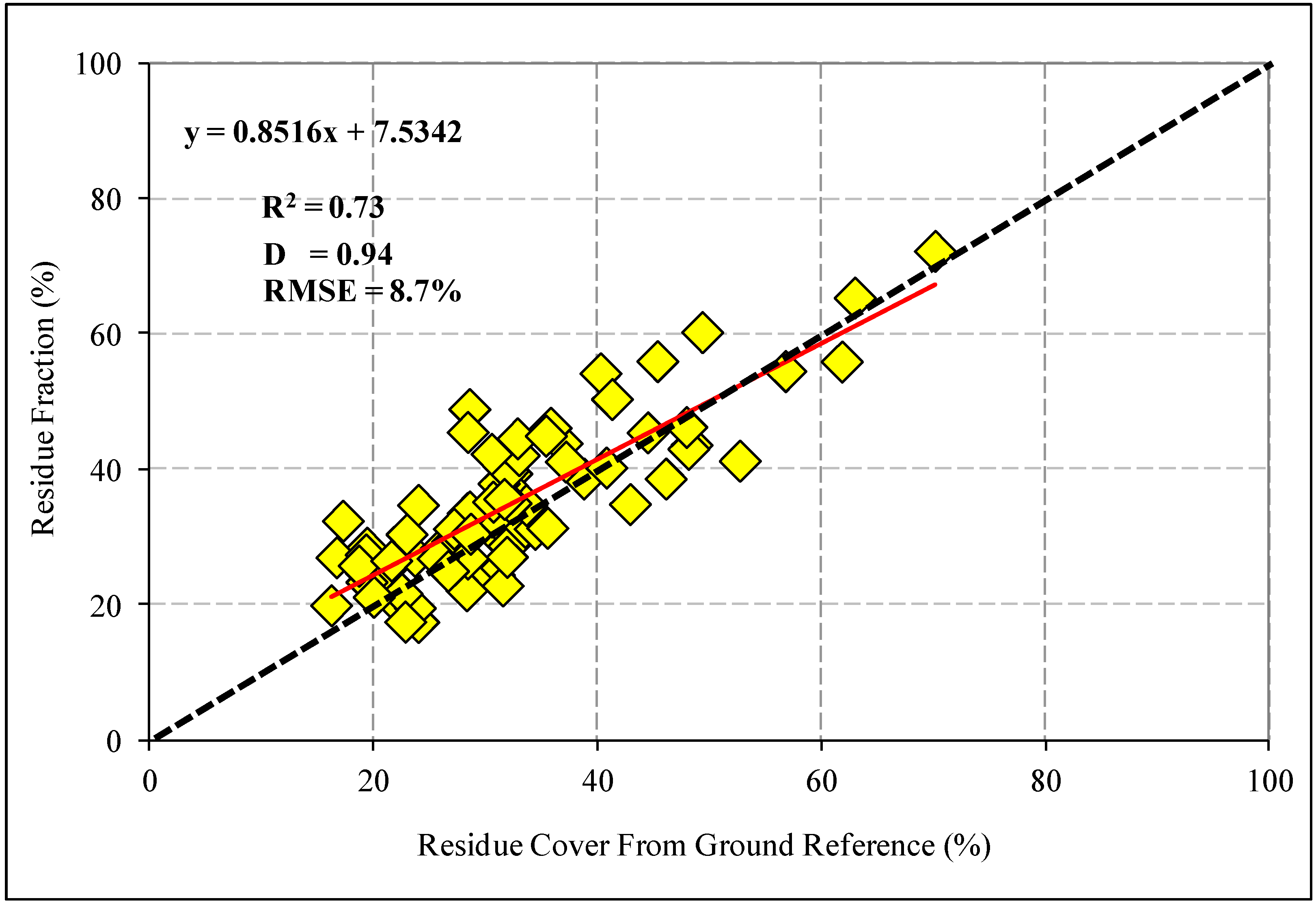
2.6. Statistical Analyses
3. Results and Discussion





4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bannari, A.; Haboudane, D.; Bonn, F. Intérêt du moyen infrarouge pour la cartographie des résidus de cultures. Can. J. Remote Sens. 2000, 26, 384–393. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Hunt, E.R., Jr.; Doraiswamy, P.C.; McMurtrey, J.E. Remote sensing the spatial distribution of crop residues. Agron. J. 2005, 97, 864–871. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Beeson, P.C.; Milak, S.; Akhmedov, B.; Sadeghi, A.M.; Hunt, E.R.; Tomer, M.D. Assessing the extent of conservation tillage in agricultural landscapes. Proc. SPIE 2012, 8531. [Google Scholar] [CrossRef]
- Zheng, B.; Campbell, J.B.; Serbin, G.; Galbraith, J.M. Remote sensing of crop residue and tillage practices: Present capabilities and future prospects. Soil Tillage Res. 2014, 138, 26–34. [Google Scholar] [CrossRef]
- Aase, J.K.; Tanaka, D.L. Reflectance from four wheat residues cover densities as influenced by three soil backgrounds. Agron. J. 1991, 83, 753–757. [Google Scholar] [CrossRef]
- Rice, C.W. Storing carbon in soil: Why and how? Geotimes 2002, 47, 1–5. [Google Scholar]
- Major, D.J.; Larney, F.L.; Lindwall, C.W. Spectral reflectance characteristics of wheat residues. In Proceedings of International Geoscience and Remote Sensing Symposium, Washington, DC, 20–24 May 1990; Volume 1, pp. 603–607.
- McNairn, H.; Protz, R. Mapping corn residues cover on agricultural fields in oxford county, ontario, using thematic mapper. Can. J. Remote Sens. 1993, 19, 152–159. [Google Scholar] [CrossRef]
- Biard, F.; Bannari, A.; Bonn, F. Soil Adjusted Corn Residues Index (SACRI): Un Indice Utilisant le Proche et le Moyen Infrarouge Pour la Détection de Résidus de Cultures de Maïs. In Proceedings of 17ème Symposium Canadien sur la Télédétection, Saskatoon, SK, Canada, 13–15 June 1995; pp. 413–419.
- Daughtry, C.S.T.; McMurtrey, J.E.; Chapelle, E.W.; Hunter, W.J.; Steiner, J.L. Measuring crop residues cover using remote sensing techniques. Theor. Appl. Climatol. 1996, 54, 17–26. [Google Scholar] [CrossRef]
- Biard, F.; Baret, F. Crop residues estimation using multiband reflectance. Remote Sens. Environ. 1997, 59, 530–536. [Google Scholar] [CrossRef]
- Bannari, A.; Haboudane, D.; McNairn, H.; Bonn, F. Modified soil adjusted crop residue index (msacri): A new index for mapping crop residue. In Proceedings of the IGARSS’2000, IEEE Geoscience and Remote Sensing Society, The Role of Remote Sensing in Managing the Global Environment, Honolulu, HI, USA, 24–28 July 2000; pp. 2936–2938.
- Ren, H.; Zhou, G. Estimating senesced biomass of desert steppe in Inner Mongolia using field spectrometric data. Agric. Forest Meteorol. 2012, 161, 66–71. [Google Scholar] [CrossRef]
- Bannari, A.; Chevrier, M.; Staenz, K.; McNairn, H. Potential of hyperspectal indices for estimating crop residue cover. Rev. Télédétect. 2008, 7, 447–463. [Google Scholar]
- Chevrier, M. Potentiel de la télédétection hyperspectrale pour la cartographie des résidus de cultures. Master’s Thesis, Geography Department, University of Ottawa, Ottawa, ON, Canada, 2002. [Google Scholar]
- Bannari, A.; Chevrier, M.; Deguise, J.-C.; McNairn, H.; Staenz, K. Senescent vegetation mapping using artificial neutral networks and hyperspectral remote sensing. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; Volume 7, pp. 4292–4294.
- Daughtry, C.S.T.; Doraiswamy, P.C.; Hunt, E.R., Jr.; Stern, J.E.; McMurtrey, J.E.; Prueger, J.H. Remote sensing of crop residues cover and soil tillage intensity. Soil Tillage Res. 2006, 91, 101–108. [Google Scholar] [CrossRef]
- Bannari, A.; Pacheco, A.; Staenz, K.; McNairn, M.; Omari, K. Estimating and mapping crop residue cover in agricultural lands using hyperspectral and IKONOS images. Remote Sens. Environ. 2006, 104, 447–459. [Google Scholar] [CrossRef]
- Varshney, P.K.; Arora, M.K. (Eds.) Advanced Image Processing Techniques for Remotely Sensed Hyperspectral Data; Springer Verlag: Berlin/Heidelberg, Germany, 2004.
- Staenz, K. A decade of imaging spectrometry in Canada. Can. J. Remote Sens. 1992, 18, 187–197. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Irshad, A.; Mohammed, I.A. Hyperspectral remote sensing of vegetation and agricultural crops. Photogramm. Eng. Remote Sens. 2014, 80, 697–709. [Google Scholar]
- Curran, P.J. Imaging spectrometry. Prog. Phys. Geogr. 1994, 18, 247–266. [Google Scholar] [CrossRef]
- Staenz, K.; Mueller, A.; Uta Heiden, U. Overview of terrestrial imaging spectroscopy missions. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS’13), Melbourne, Australia, 21–26 July 2013; pp. 3502–3505.
- Adams, J.B.; Smith, M.O.; Gillepsie, A.R. Imaging spectroscopy: Interpretation based on spectral mixture analysis. In Remote Geochemical Analysis: Elemental and Mineralogical Composition; Pieters, C.M., Englert, P.A.J., Eds.; Cambridge University: Cambridge, UK, 1993; pp. 145–166. [Google Scholar]
- Thenkabail, P.S.; Lyon, J.G.; Huete, A. Hyperspectral Remote Sensing of Vegetation; CRC Press, Taylor and Francis Group: New York, USA, 2011. [Google Scholar]
- Goetz, A.F.H.; Vane, G.; Solomon, J.E.; Rock, B.N. Imaging spectrometry for earth remote sensing. Science 1985, 228, 1147–1153. [Google Scholar] [CrossRef] [PubMed]
- Staenz, K. Classification of a hyperspectral agriculture data set using band moments for reduction of the spectral dimensionality. Can. J. Remote Sens. 1996, 22, 248–257. [Google Scholar] [CrossRef]
- Staenz, K.; Szeredi, T.; Schwarz, J. ISDAS A system for processing and analyzing hyperspectral data. Can. J. Remote Sens. 1998, 42, 99–113. [Google Scholar] [CrossRef]
- Staenz, K.; Nadeau, C.; Secker, J.; Budkewitsch, P. Spectral unmixing applied to vegetated environments in the Canadian Arctic for mineral mapping. In Proceedings of the XIX ISPRS Congress, Amsterdam, The Netherlands, 16–23 July 2000.
- Adams, J.B.; Smith, M.O.; Johnson, P.E. Spectral mixture modeling: A new analysis of rock and soil types at Viking Lander. J. Geophys. Res. 1986, 91, 8113–8125. [Google Scholar] [CrossRef]
- Boardman, J.W. Analysis, understanding and visualization of hyperspectral data convex sets in N-Space. Proc. SPIE 1995, 2480, 14–20. [Google Scholar]
- Tompkins, S.; Mustard, J.F.; Pieters, C.M.; Forsyth, D.W. Optimization of endmembers for spectral mixture analysis. Remote Sens. Environ. 1997, 59, 472–489. [Google Scholar] [CrossRef]
- Neville, R.A.; Staenz, K.; Szeredi, T.; Lefebvre, J.; Hauff, P. Automatic endmember extraction from hyperspectral data for mineral exploration. In Proceedings of the Fourth International Airborne Remote Sensing Conference and Exhibition and the 21st Symposium on Remote Sensing, Ottawa, ON, Canada, 21–24 June 1999; Volume 2, pp. 891–897.
- García-Haro, F.J.; Gilabert, M.A.; Meliá, J. Extraction of endmembers from spectral mixtures. Remote Sens. Environ. 1999, 68, 237–253. [Google Scholar] [CrossRef]
- Feng, J.; Rivard, B.; Sánchez-Azofeifa, A. The topographic normalization of hyperspectral data: Implications for the selection of spectral end members and lithologic mapping. Remote Sens. Environ. 2003, 85, 221–231. [Google Scholar] [CrossRef]
- Beck, R. EO-1 User Guide, Version 2.3. Available online: http://eo1.usgs.gov and http://eo1.gsfc.nasa.gov; (accessed on 15 October 2015).
- NASA Sensors-Hyperion. Available online: http://eo1.usgs.gov/sensors/hyperion (accessed on 15 October 2015).
- Khurshid, K.S.; Staenz, K.; Sun, L.; Neville, R.; White, H.P.; Bannari, A.; Champagne, C.M.; Hitchcock, R. Preprocessing of EO-1 hyperion data. Can. J. Remote Sens. 2006, 32, 84–97. [Google Scholar] [CrossRef]
- Kruse, F.A.; Boardman, J.W.; Huntington, J.F. Comparison of airborne hyperspectral data and EO-1 hyperion for mineral mapping. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1388–1400. [Google Scholar] [CrossRef]
- Sun, L.; Neville, R.A.; Staenz, K.; White, H.P. Automatic destriping of hyperion imagery based on spectral moment matching. Can. J. Remote Sens. 2008, 34, 68–81. [Google Scholar] [CrossRef]
- USGS, Earth Observing-1. Available online: http://eo1.usgs.gov/sensors/hyperioncoverage (accessed on 15 October 2015).
- Neville, R.A.; Sun, L.; Staenz, K. Spectral calibration of imaging spectrometers by atmospheric absorption feature matching. Can. J. Remote Sens. 2008, 34, 29–42. [Google Scholar] [CrossRef]
- Neville, R.A.; Sun, L.; Staenz, K. Detection of keystone in imaging spectrometer data. Proc. SPIE 2004, 5425. [Google Scholar] [CrossRef]
- Richter, N. Delineation of the Kam Kotia Mine Tailings Areas (Ontario, Canada) Using Hyperspectral TRWIS III Data. Master’s Thesis, Faculty of Mathematics and Natural Sciences, Institute for Geoecology, University of Potsdam, Potsdam, Germany, 2004. [Google Scholar]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Chetwynd, J.H.; Bernstein, L.S.; Shettle, E.P.; Matthew, M.W.; Adler-Golden, S.M. MODTRAN 4 User’s Manual; Air Force Research Laboratory: Hanscom AFB, MA, USA, 1999. [Google Scholar]
- Staenz, K.; Williams, D.J. Retrieval of Surface Reflectance from Hyperspectral Data Using a Look-Up Table Approach. Can. J. Remote Sens. 1997, 23, 354–368. [Google Scholar] [CrossRef]
- Green, R.O.; Conel, J.E.; Margolis, J.S.; Brugge, C.J.; Hoover, G.L. An inversion algorithm for the retrieval of atmospheric and leaf water absorption from AVIRIS radiance with compensation for atmospheric scattering. In Proceedings of the Third Annual Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) Workshop, Pasadena, CA, USA, 20–21 May 1991; Volume 91, pp. 51–61.
- Gao, B.C.; Goetz, A.F.H. Column atmospheric water vapor and vegetation liquid water retrieval from Airborne Imaging Spectrometer data. J. Geophys. Res. 1990, 95, 3549–3564. [Google Scholar] [CrossRef]
- Staenz, K.; Neville, R.A.; Levesque, J.; Szeredi, T.; Singhroy, V.; Borstad, G.A.; Hauff, P. Evaluation of CASI and SFSI hyperspectral data for environmental and geological applications—Two case studies. Can. J. Remote Sens. 1999, 25, 311–322. [Google Scholar] [CrossRef]
- Champagne, C. Remote Sensing of Plant Water Content for Precision Agriculture: the Potential for Hyperspectral Modelling. Master’s Thesis, Geography Department, University of Ottawa, Ottawa, ON, Canada, 2002. [Google Scholar]
- PCI Geomatics. Tutorials; PCI Geomatics: Richmond Hill, ON, Canada, 2015; Available online: http://www.pcigeomatics.com/resources-support/geomatica/tutorials.pdf (accessed on 15 February 2015).
- Geophysical and Environmental Research Corporation. GER 3700 Spectroradiometer User’s Manual Version 2.1; Millbrook: New York, USA, 1990. [Google Scholar]
- Wang, L.; He, D.C.; Baulu, T. Unsupervised classification of remotely sensed multispectral image data. Can. J. Remote Sens. 1992, 8, 174–178. [Google Scholar] [CrossRef]
- Labsphere, A. Guide to Reflectance Coatings and Materials, North Sutton, New Hampshire. Available online: http://www.labsphere.com/tech_info/docs/Coating_&_Material_Guide.pdf (accessed on 15 October 2014).
- Jackson, R.D.; Pinter, P.J.; Paul, J.; Reginato, R.J.; Robert, J.; Idso, S.B. Hand-Held Radiometry—A Set of Notes Developed for Use at the Workshop on Hand-Held Radiometry Phoenix, Ariz., February 25-26, 1980; Agricultural Reviews and Manuals; ARM-W-19; U.S. Department of Agriculture Science and Education Administration: Phoenix, AZ, USA, 1980. [Google Scholar]
- Cyr, L.; Bonn, F.; Pesant, A. Vegetation indices derived from remote sensing for estimation of soil protection against water erosion. Ecol. Model. 1995, 79, 277–285. [Google Scholar] [CrossRef]
- Arsenault, É.; Bonn, F. Evaluation of soil erosion protective cover by crop residues using vegetation indices and spectral mixture analysis of multispectral and hyperspectral data. In Proceedings of the 23rd Canadian Symposium on Remote Sensing, Canadian Remote Sensing Society, Ottawa, ON, Canada, 21–24 August 2001; pp. 299–308.
- Zhang, L.; Li, D.; Tong, Q.; Zheng, L. Study of the spectral mixture model of soil and vegetation in PoYang Lake area, China. Int. J. Remote Sens. 1998, 19, 2077–2084. [Google Scholar] [CrossRef]
- Peddle, D.R.; Hall, F.G.; LeDrew, E.F. Spectral mixture analysis and geometric-optical reflectance modeling of boreal forest biophysical structure. Remote Sens. Environ. 1999, 67, 288–297. [Google Scholar] [CrossRef]
- Lévesque, J.; King, D.J. Spatial analysis of radiometric fractions from high-resolution multispectral imagery for modelling individual tree crown and forest canopy structure and health. Remote Sens. Environ. 2003, 84, 586–602. [Google Scholar] [CrossRef]
- Pacheco, A.; Bannari, A.; Staenz, K.; McNairn, H. Deriving percent crop cover over agriculture canopies using hyperspectral remote sensing. Can. J. Remote Sens. 2008, 34, 110–123. [Google Scholar] [CrossRef]
- Schwarz, J. Classification of Hyperspectral Data. Master’s Thesis, School of Computer Science, Carleton University, Ottawa, ON, Canada, 1998. [Google Scholar]
- Myneni, R.B.; Maggion, S.; Jaquinta, J.; Privette, J.L.; Gordon, N.; Pinty, B.; Kimes, D.S.; Verstraete, M.M.; Williams, D.L. Optical remote sensing of vegetation: modeling, caveats, and algorithms. Remote Sens. Environ. 1995, 51, 169–188. [Google Scholar] [CrossRef]
- Kerdiles, H.; Grondona, M.O. NOAA-AVHRR NDVI decomposition and subpixel classification using linear mixing in the Argentinean Pampa. Int. J. Remote Sens. 1995, 16, 1303–1325. [Google Scholar] [CrossRef]
- Boardman, J.W. Automating spectral unmixing of AVIRIS data using convex geometry. In Summaries of the 4th Airborne Geoscience Conference; Green, R.O., Ed.; JPL Jet Propulsion Laboratory: Pasadena, CA, USA, 1992; Volume 1, pp. 11–14. [Google Scholar]
- Endsley, H.H. Spectral unmixing algorithms based on statistical models. Proc. SPIE 1995, 2480, 14–22. [Google Scholar]
- Statistica Software. Available online: http://statistica.software.informer.com/10.0/ (accessed on 15 October 2014).
- Willmott, C.J. Some comments on the evaluation of model performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef]
- Daughtry, C.S.T. Discriminating crop residues from soil by shortwave infrared reflectance. Agron. J. 2001, 93, 125–131. [Google Scholar] [CrossRef]
- Bannari, A.; Haboudane, D.; Bonn, F. Potentiel des mesures multispectrales pour la distinction entre les résidus de cultures et les sols nus sous-jacents. In Proceedings of Forth International Airborne Remote Sensing Conference and Exhibition/21st Canadian Symposium on Remote Sensing, Ottawa, ON, Canada, 21–24 June 1999; Volume 2, pp. 359–366.
- Shang, J.; Neville, R.A.; Staenz, K.; Sun, L.; Morris, B.; Howarth, P. Comparison of fully constrained and weakly constrained unmixing through mine-tailings composition mapping. Can. J. Remote Sens. 2008, 34, 92–109. [Google Scholar] [CrossRef]
- Irons, J.R.; Weismiller, R.A.; Petersen, G.W. Soil reflectance. In Theory and Applications of Optical Remote Sensing; Asrar, G., Ed.; Wiley-Interscience: New York, NY, USA, 1989; pp. 66–106. [Google Scholar]
- Bannari, A.; Huete, A.R.; Morin, D.; Zagolski, F. Effets de la couleur et de la brillance du sol sur les indices de végétation. Int. J. Remote Sens. 1996, 17, 1885–1906. [Google Scholar] [CrossRef]
- Huete, A.R. Soil influences in remotely sensed vegetation-canopy spectra. In Theory and Applications of Optical Remote Sensing; Asrar, G., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1989; pp. 107–141. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bannari, A.; Staenz, K.; Champagne, C.; Khurshid, K.S. Spatial Variability Mapping of Crop Residue Using Hyperion (EO-1) Hyperspectral Data. Remote Sens. 2015, 7, 8107-8127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70608107
Bannari A, Staenz K, Champagne C, Khurshid KS. Spatial Variability Mapping of Crop Residue Using Hyperion (EO-1) Hyperspectral Data. Remote Sensing. 2015; 7(6):8107-8127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70608107
Chicago/Turabian StyleBannari, Abderrazak, Karl Staenz, Catherine Champagne, and K. Shahid Khurshid. 2015. "Spatial Variability Mapping of Crop Residue Using Hyperion (EO-1) Hyperspectral Data" Remote Sensing 7, no. 6: 8107-8127. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70608107