
Improving the Accuracy of the Water Surface Cover Type in the 30 m FROM-GLC Product

Abstract
:
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Location | Acquisition Date/Image Size | TM Image | FROM-GLC Image |
|---|---|---|---|---|
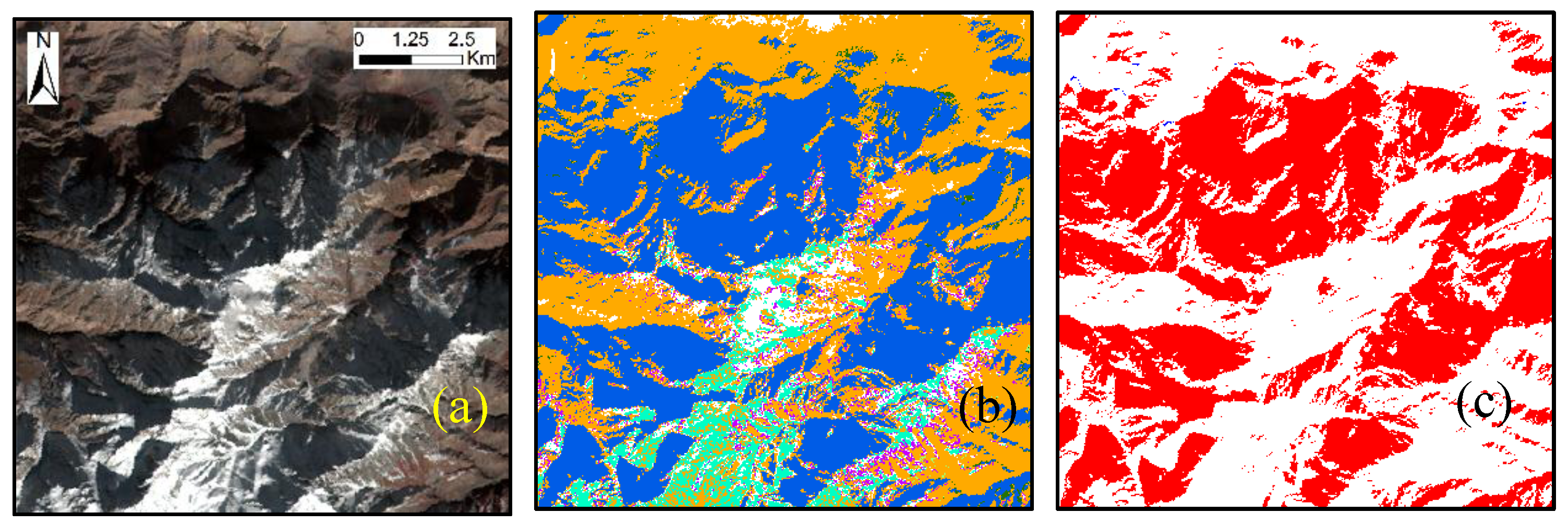
| Problem 1: Commission errors in the mountain shadow area | Alaska, USA, North America. Lat: 62.66° Lon: −152.16° | Date: 27 September 2011 Size: 400 × 400 |  |  |
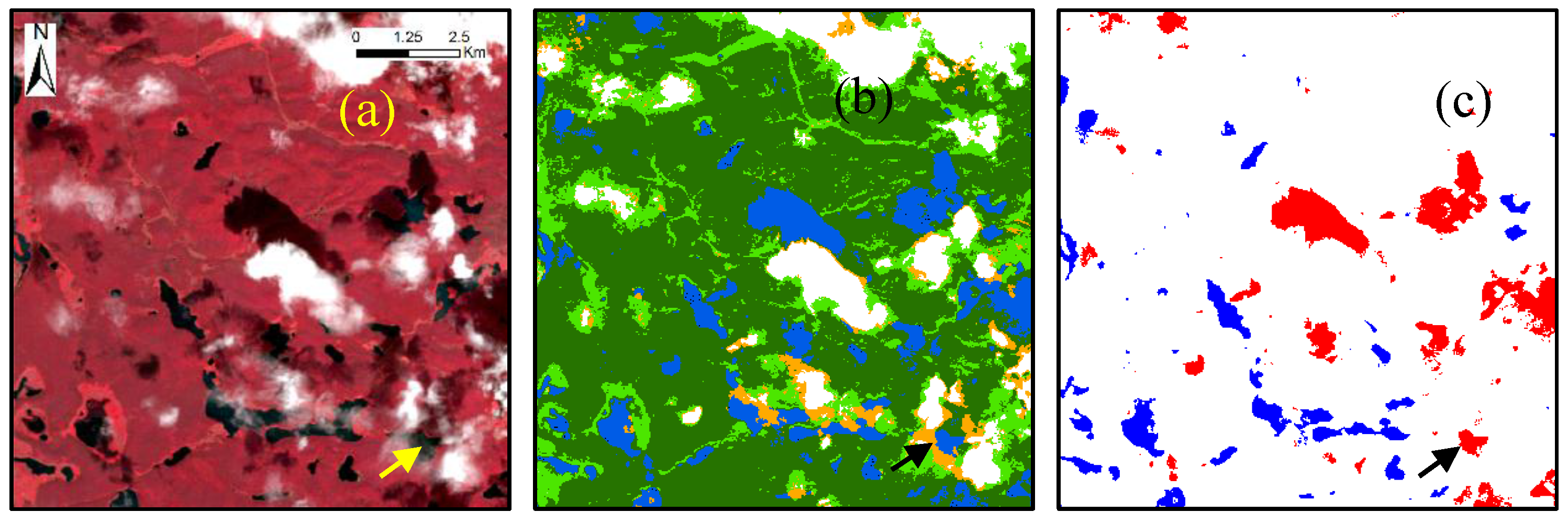
| Problem 2: Commission errors in the cloud shadow area | Maluku, Indonesia, Asia. Lat: −3.03° Lon: 128.72° | Date: 30 January 2008 Size: 400 × 400 |  |  |
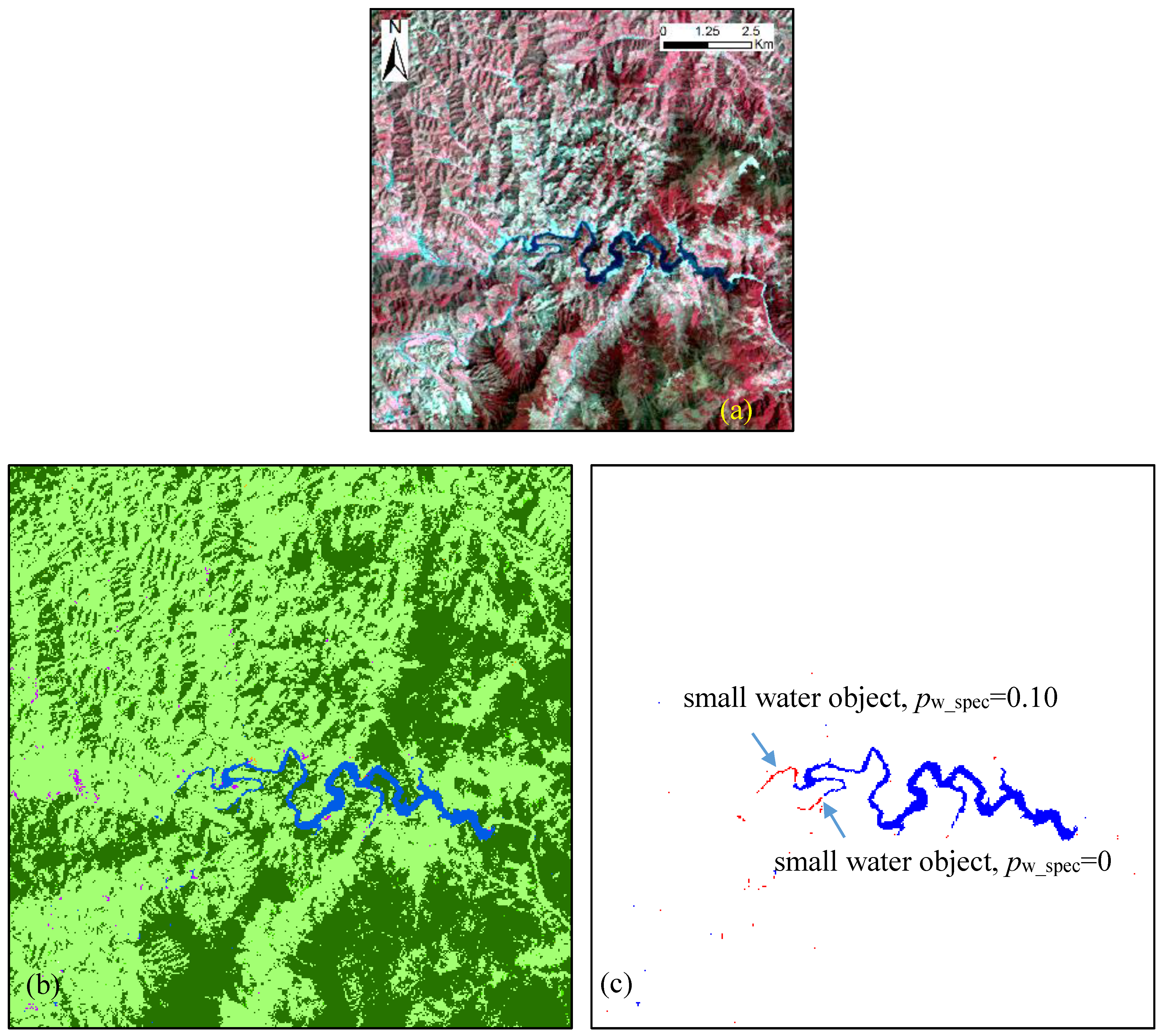
| Problem 3: Spectral mixing at the boundary area | Itapua, Paraguay, South America. Lat: −27.36° Lon: −56.32° | Date: 7 February 2010 Size: 50 × 50 |  |  |
FROM-GLC legend:  Cropland Cropland  Forest Forest  Grass Grass  Shrub Shrub  Water Water  Impervious Impervious  Bareland Bareland  Snow/Ice Snow/Ice  Cloud Cloud | ||||
2. Data Preparation
- Landsat TM/ETM+ atmosphere corrected data at 30 m resolution for water spectral feature extraction and water fraction calculation. Scenes from 56°S to 60°N except for China have had topographical correction to alleviate the topographical effect;
- ASTER 30 m elevation data and SRTM 90 m elevation data for slope calculation. The ASTER DEM is used as supplementary data for areas from 60°N to 80°N where SRTM DEM does not cover;
- A global validation sample set for validation analysis, which contains 37,711 validation sample units, among which 1555 are in the water category. These were initially designed for validating FROM-GLC. However, the dataset has been carefully improved through several rounds of interpretation and verification, supplemented by MODIS enhanced vegetation index (EVI) time series data and high-resolution imagery from Google Earth [15].
3. Method
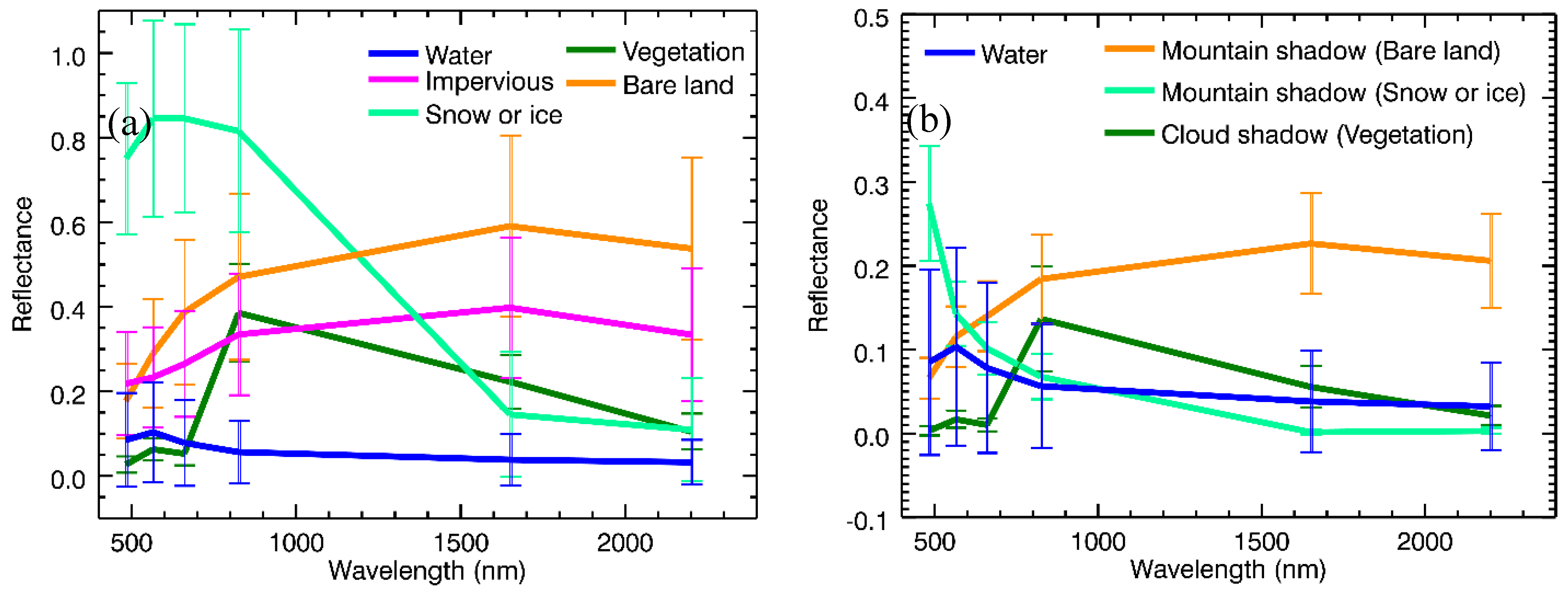
3.1. Spectral and Topographical Characteristics of Water and Land
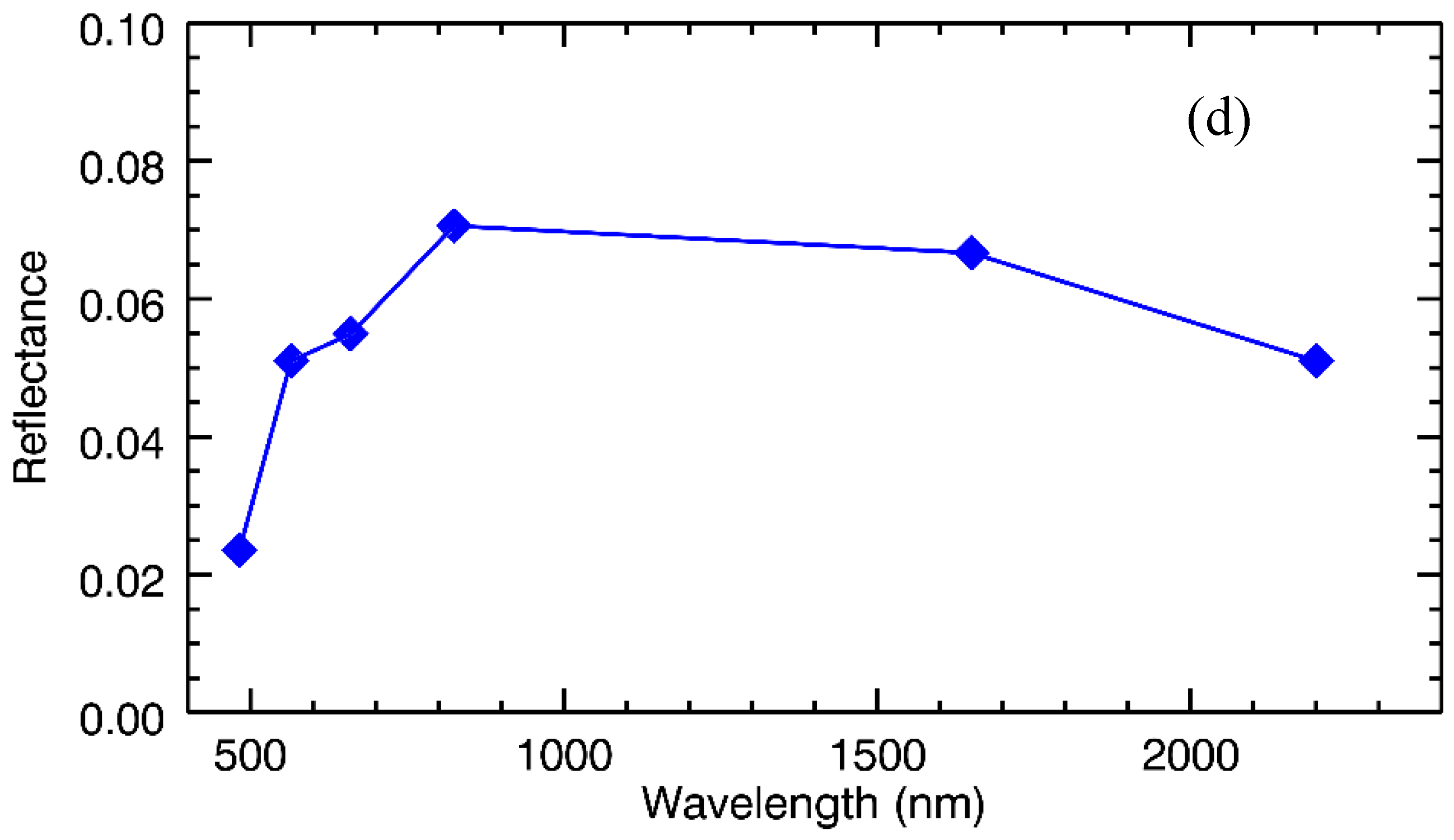
3.1.1. Spectral Characteristics

3.1.2. Topographical Characteristics
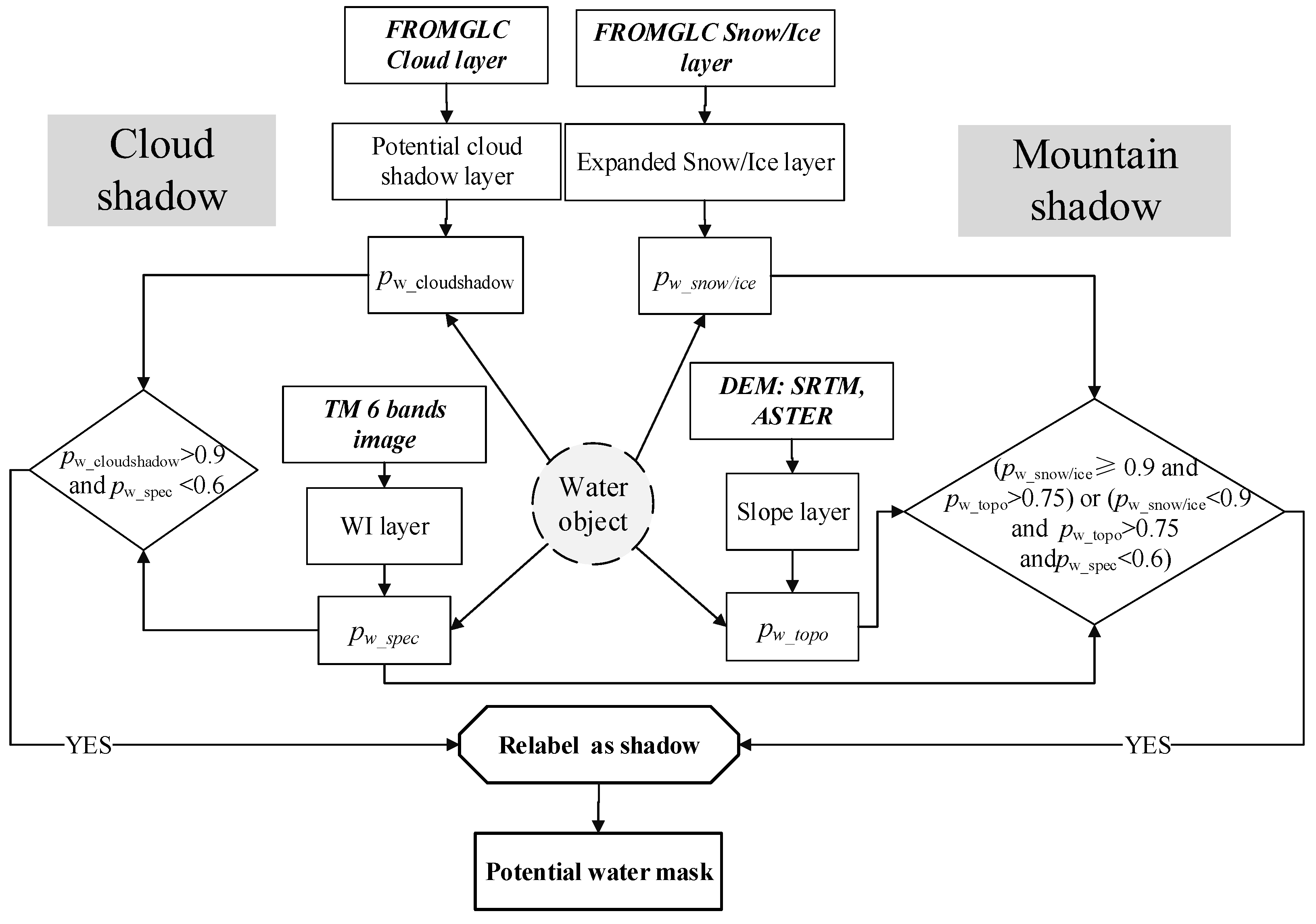
3.2. Object-Based Method to Remove Misclassification in Mountain and Cloud Shadows
3.2.1. Mountain Shadow Object
3.2.2. Cloud Shadow Object

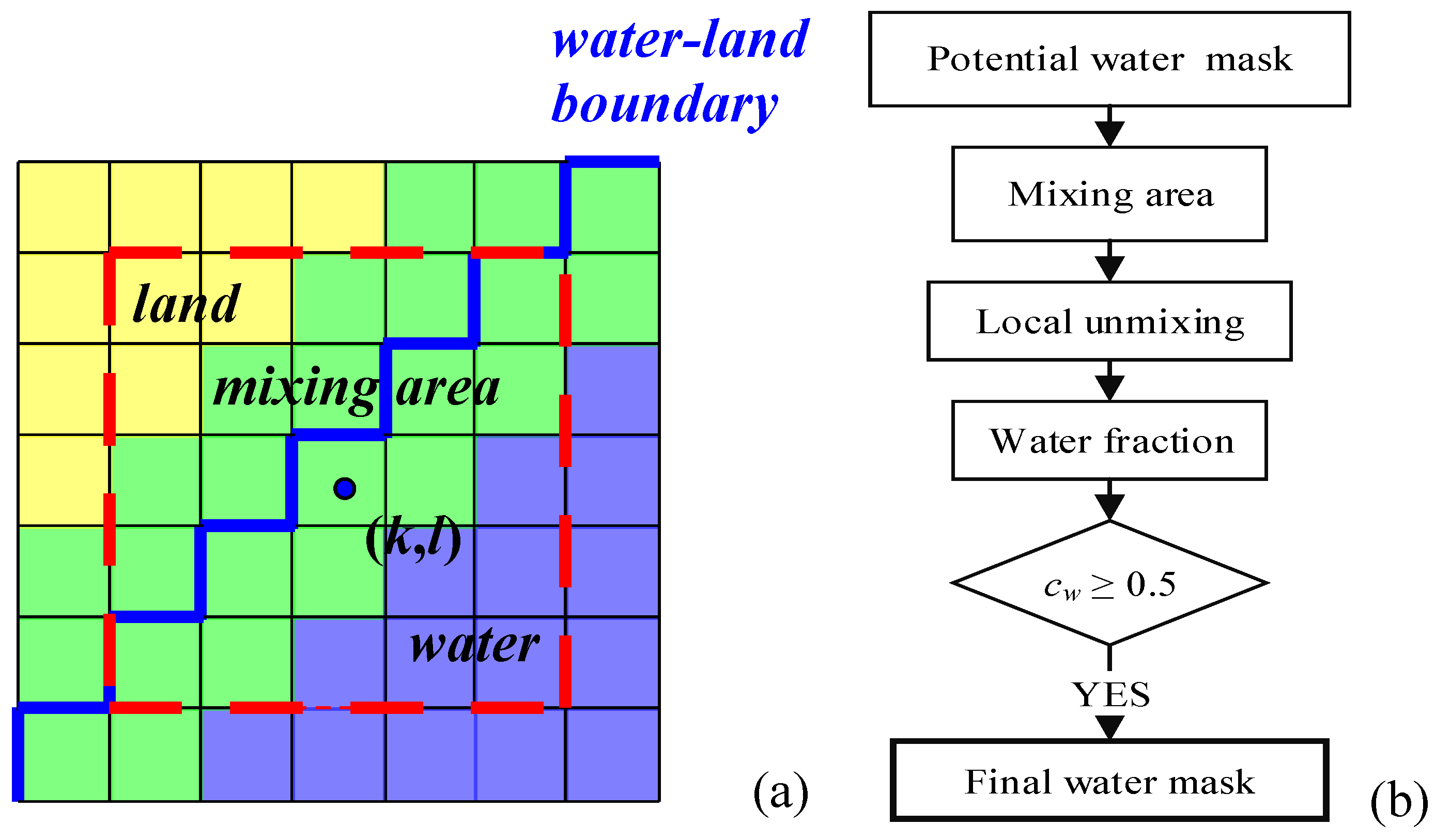
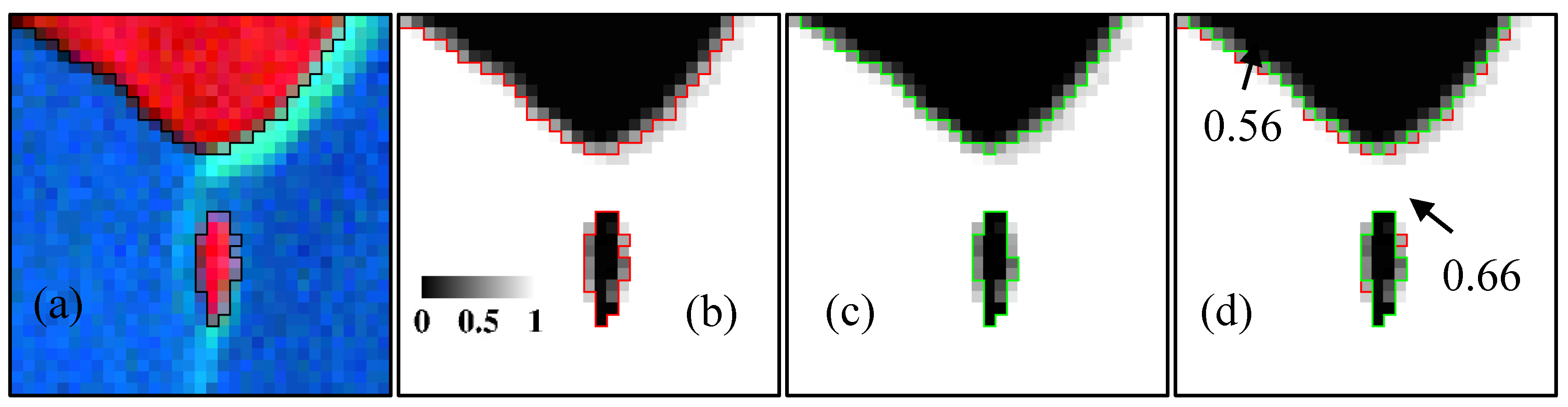
3.3. Solving the Spectral Mixing Problem Using Local Spectral Unmixing

4. Results and Validation
4.1. Results from the Object-Based Method





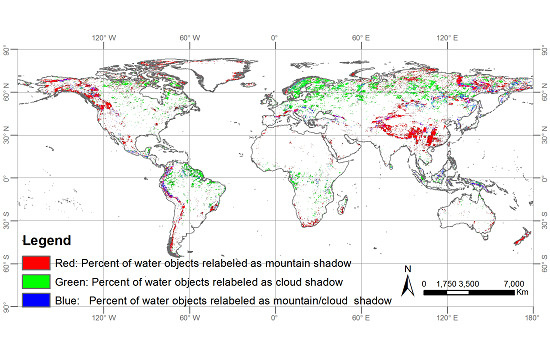
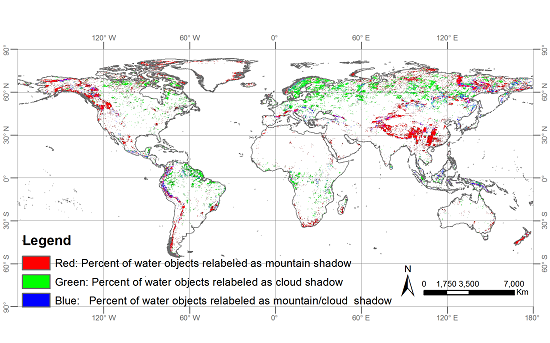
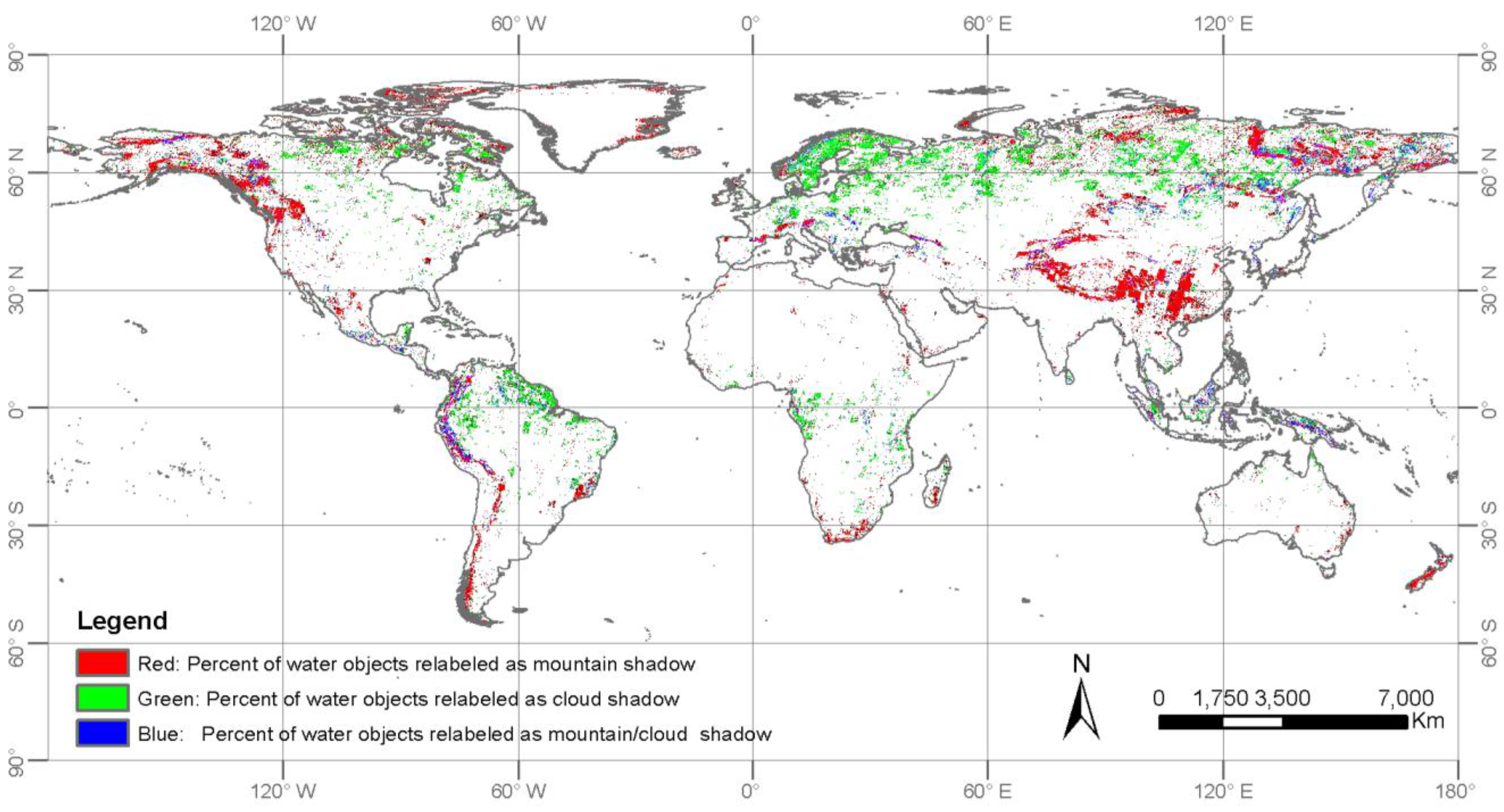
| The Water Objects Relabeled As | Percentage (%) |
|---|---|
| Mountain shadow, pW-MS | 25.62% |
| Cloud shadow, pW-CS | 5.52% |
| Mountain/cloud shadow, pW-MCS | 2.51% |
| Total | 33.65% |
4.2. Results from Local Spectral Unmixing

| Percentage | |
|---|---|
| water pixel relabeled as land, pW_L | 1.70% |
| land pixel relabeled as water, pL_W | 7.91% |
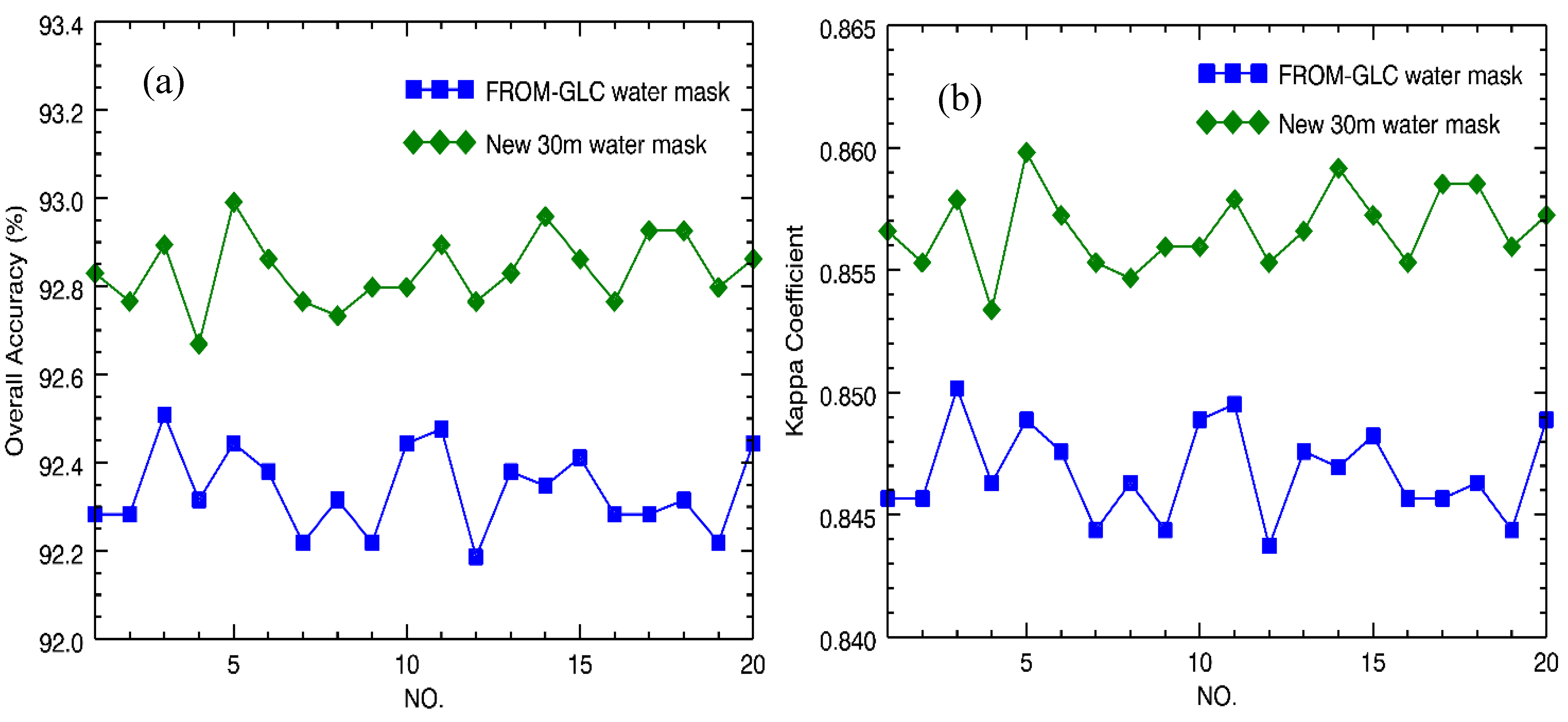
4.3. Validation Using the Global Validation Sample
| FROM-GLC | New 30 m Water Mask | ||||||
|---|---|---|---|---|---|---|---|
| Reference | Reference | ||||||
| Land | Water | UA(%) | Land | Water | UA(%) | ||
| Classification | Land | 35,863 | 223 | 99.38 | 35,980 | 215 | 99.41 |
| Water | 293 | 1332 | 81.97 | 176 | 1340 | 88.39 | |
| PA(%) | 99.19 | 85.66 | 98.63 | 99.51 | 86.17 | 98.96 | |

4.4. Overall Distribution of the New Water Mask
| Continent | Water Area (×104 km2) | |
|---|---|---|
| FROM-GLC Water Mask | The New Water Mask | |
| Asia | 187.54 | 145.82 |
| Europe | 43.43 | 34.69 |
| Africa | 37.84 | 34.70 |
| North America | 161.73 | 150.73 |
| South America | 45.50 | 35.68 |
| Oceania | 7.36 | 5.24 |
| Total | 483.40 | 406.86 |
5. Discussion

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Roberts, N.; Taieb, M.; Barker, P.; Damnati, B.; Icole, M.; Williamson, D. Timing of the Younger Dryas event in East Africa from lake-level changes. Nature 1993, 366, 146–148. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Yu, Y.; Csiszar, I.; Stefanidis, A.; Goldberg, M.D. A new short-wave infrared (SWIR) method for quantitative water fraction derivation and evaluation with EOS/MODIS and Landsat/TM data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1852–1862. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2012, 34, 2607–2654. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. A global, self-consistent, hierarchical, high-resolution shoreline database. J. Geophys Res.: Solid Earth 1996, 101, 8741–8743. [Google Scholar] [CrossRef]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Salomon, J.; Hodges, J.C.F.; Friedl, M.; Schaaf, C.; Strahler, A.; Gao, F.; Schneider, A.; Zhang, X.; El Saleous, N.; Wolfe, R.E. Global land-water mask derived from MODIS NADIR BRDF-adjusted reflectances (NBAR) and the MODIS land cover algorithm. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’04), Anchorage, AK, USA, 20–24 September 2004; pp. 239–241.
- Carroll, M.L.; Townshend, J.R.; DiMiceli, C.M.; Noojipady, P.; Sohlberg, R.A. A new global raster water mask at 250 m resolution. Int. J. Digit. Earth 2009, 2, 291–308. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP discover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Bartholomé, E.; Belward, A.S. GLC2000: A new approach to global land cover mapping from Earth Observation data. Int. J. Remote Sens. 2005, 26, 1959–1977. [Google Scholar] [CrossRef]
- Arino, O.; Bicheron, P.; Achard, F.; Latham, J.; Witt, R.; Weber, J.L. GlobCover: The most detailed portrait of Earth. Eur. Space Agency 2008, 136, 25–31. [Google Scholar]
- Liao, A.; Chen, L.; Chen, J.; He, C.; Cao, X.; Chen, J.; Peng, S.; Sun, F.; Gong, P. High-resolution remote sensing mapping of global land water. Sci. China Ser. D: Earth Sci. 2014, 57, 2305–2316. [Google Scholar] [CrossRef]
- Verpoorter, C.; Kutser, T.; Seekell, D.A.; Tranvik, L.J. A global inventory of lakes based on high-resolution satellite imagery. Geophys. Res. Lett. 2014, 41, GL060641. [Google Scholar] [CrossRef]
- Verpoorter, C.; Kutser, T.; Tranvik, L.J. Automated mapping of water bodies using Landsat multispectral data. Limnol. Ocean. Method 2012, 10, 1037–1050. [Google Scholar] [CrossRef]
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic-spectral classification algorithm. Int. J. Digit. Earth 2015. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, P.; Yu, L.; Hu, L.; Li, X.; Li, C.; Zhang, H.; Zheng, Y.; Wang, J.; Zhao, Y.; et al. Towards a common validation sample set for global land-cover mapping. Int. J. Remote Sens. 2014, 35, 4795–4814. [Google Scholar] [CrossRef]
- Niu, Z.; Gong, P.; Cheng, X.; Guo, J.; Wang, L.; Huang, H. Geographical characteristics of China’s wetlands derived from remotely sensed data. Sci. China Ser. D: Earth Sci. 2009, 52, 723–738. [Google Scholar] [CrossRef]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and improvement of methods for identifying waterbodies in remotely sensed imagery. Int. J. Remote Sens. 2012, 33, 6854–6875. [Google Scholar] [CrossRef]
- Lu, S.; Wu, B.; Yan, N.; Wang, H. Water body mapping method with HJ-1A/B satellite imagery. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 428–434. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Ji, L.; Geng, X.; Sun, K.; Zhao, Y.; Gong, P. Target detection method for water mapping using Landsat 8 OLI/TIRS imagery. Water 2015, 7, 794–817. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Yu, Y. Automatic cloud-shadow removal from flood/standing water maps using MSG/SEVIRI imagery. Int. J. Remote Sens. 2013, 34, 5487–5502. [Google Scholar] [CrossRef]
- Wang, J.; Li, C.; Hu, L.; Zhao, Y.; Huang, H.; Gong, P. Seasonal land cover dynamics in Beijing derived from Landsat 8 data using a spatio-temporal contextual approach. Remote Sens. 2015, 7, 865–881. [Google Scholar] [CrossRef]
- Sun, D.; Yu, Y.; Goldberg, M.D. Deriving water fraction and flood maps from Modis images using a decision tree approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 814–825. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Goldberg, M.; Stefanidis, A. Derivation of 30-m-resolution water maps from TERRA/MODIS and SRTM. Remote Sens. Environ. 2013, 134, 417–430. [Google Scholar] [CrossRef]
- Ji, L.; Geng, X.; Sun, K.; Zhao, Y.; Gong, P. Modified N-FINDR endmember extraction algorithm for remote-sensing imagery. Int. J. Remote Sens. 2015, 36, 2148–2162. [Google Scholar] [CrossRef]
- Geng, X.; Ji, L.; Zhao, Y.; Wang, F. A new endmember generation algorithm based on a geometric optimization model for hyperspectral images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 811–815. [Google Scholar] [CrossRef]
- Berman, M.; Kiiveri, H.; Lagerstrom, R.; Ernst, A.; Dunne, R.; Huntington, J.F. Ice: A statistical approach to identifying endmembers in hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2085–2095. [Google Scholar] [CrossRef]
- Miao, L.; Qi, H. Endmember extraction from highly mixed data using minimum volume constrained nonnegative matrix factorization. IEEE Trans. Geosci. Remote Sens. 2007, 45, 765–777. [Google Scholar] [CrossRef]
- Winter, M.E. N-FINDR: An algorithm for fast autonomous spectral end-member determination in hyperspectral data. Proc. SPIE 1999, 3753, 266–275. [Google Scholar]
- Geng, X.; Xiao, Z.; Ji, L.; Zhao, Y.; Wang, F. A Gaussian elimination based fast endmember extraction algorithm for hyperspectral imagery. ISPRS J. Photogramm. Remote Sens. 2013, 79, 211–218. [Google Scholar] [CrossRef]
- Heinz, D.C.; Chein, I.C. Fully constrained least squares linear spectral mixture analysis method for material quantification in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 529–545. [Google Scholar] [CrossRef]
- Dronova, I.; Gong, P.; Wang, L. Object-based analysis and change detection of major wetland cover types and their classification uncertainty during the low water period at Poyang Lake, China. Remote Sens. Environ. 2011, 115, 3220–3236. [Google Scholar] [CrossRef]
- Kaptué, A.T.; Hanan, N.P.; Prihodko, L. Characterization of the spatial and temporal variability of surface water in the Soudan-Sahel region of Africa. J. Geophys Res. Biogeosci. 2013, 118, 1472–1483. [Google Scholar] [CrossRef]
- Sun, F.D.; Zhao, Y.; Gong, P.; Ma, R.; Dai, Y. Monitoring dynamic changes of global land cover types: Fluctuations of major lakes in China every 8 days during 2000–2010. Chin. Sci. Bull. 2014, 59, 171–189. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, L.; Gong, P.; Geng, X.; Zhao, Y. Improving the Accuracy of the Water Surface Cover Type in the 30 m FROM-GLC Product. Remote Sens. 2015, 7, 13507-13527. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71013507
Ji L, Gong P, Geng X, Zhao Y. Improving the Accuracy of the Water Surface Cover Type in the 30 m FROM-GLC Product. Remote Sensing. 2015; 7(10):13507-13527. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71013507
Chicago/Turabian StyleJi, Luyan, Peng Gong, Xiurui Geng, and Yongchao Zhao. 2015. "Improving the Accuracy of the Water Surface Cover Type in the 30 m FROM-GLC Product" Remote Sensing 7, no. 10: 13507-13527. https://0-doi-org.brum.beds.ac.uk/10.3390/rs71013507