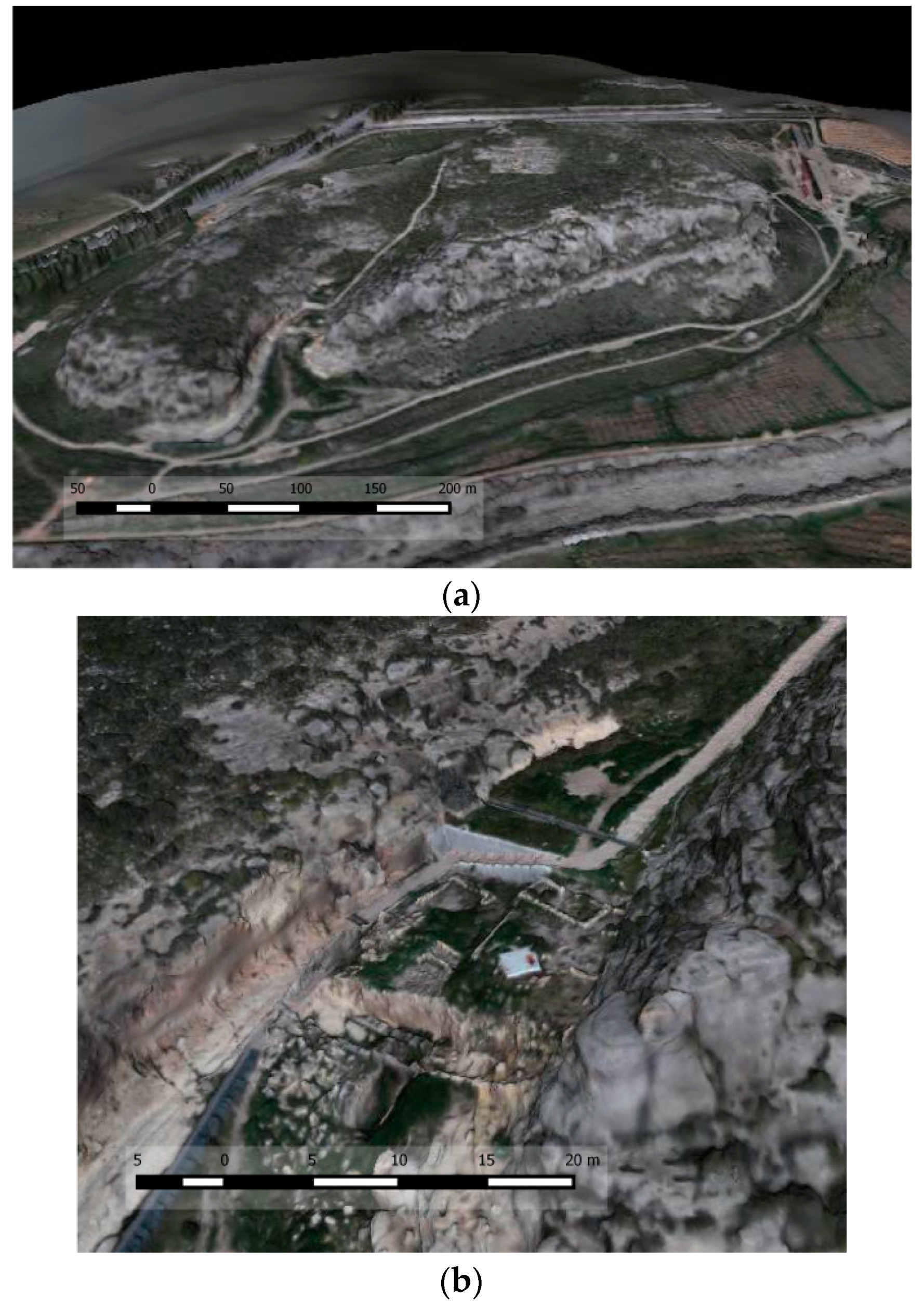
4.1. Area of Study
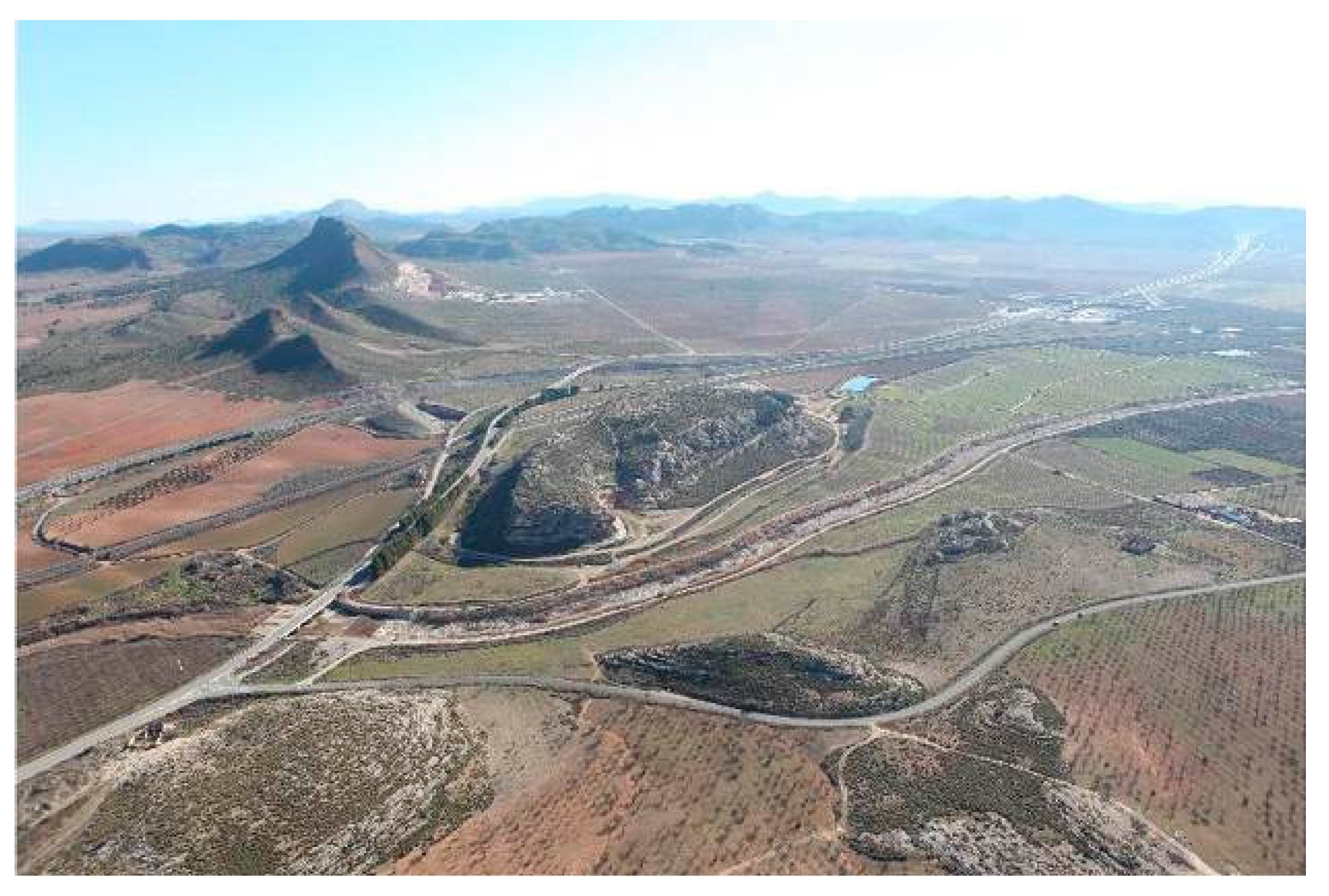
The city of “Tolmo de Minateda” (
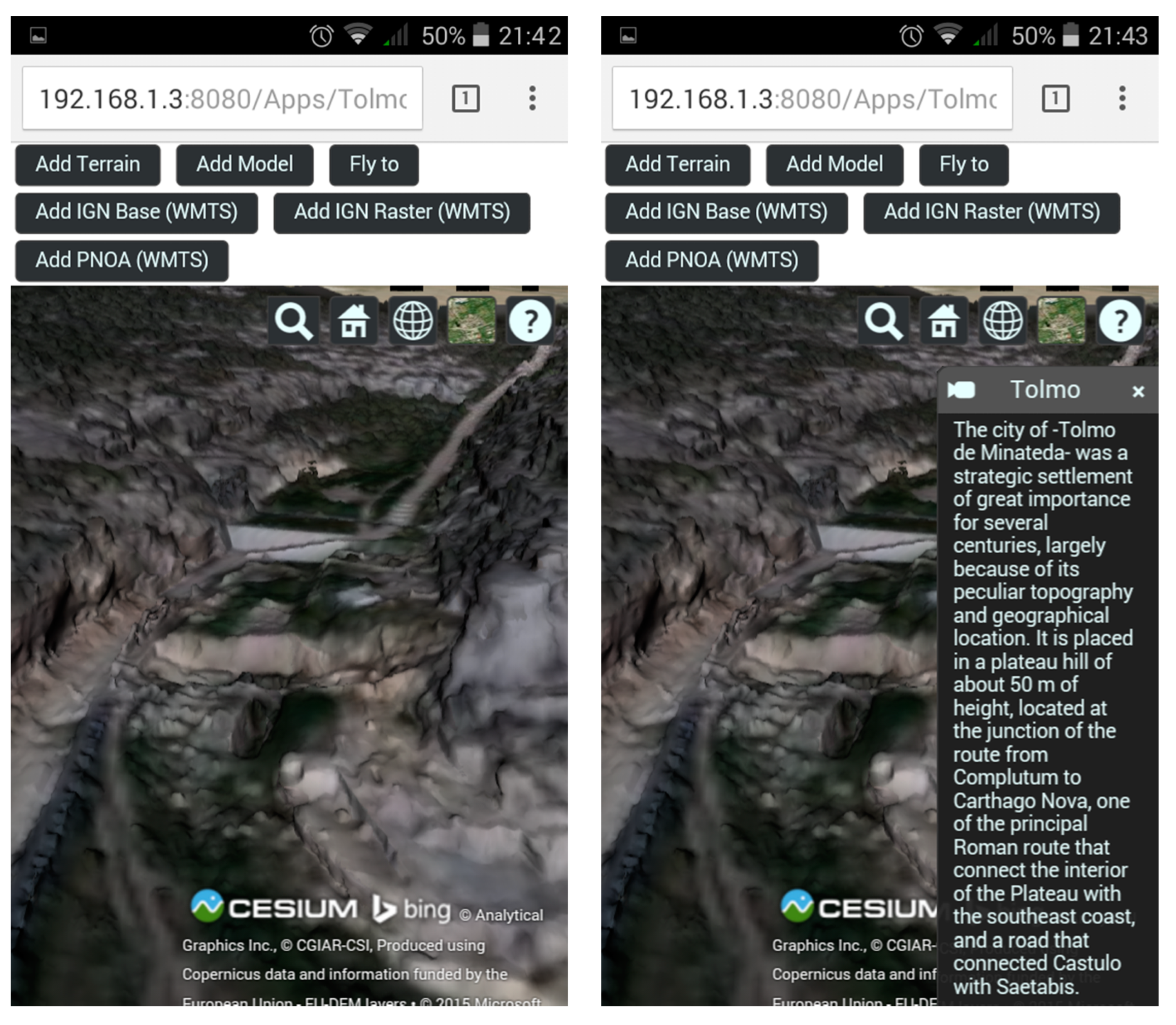
Figure 6) was a strategic settlement of great importance for several centuries, largely because of its peculiar topography and geographical location. It is placed on a plateau hill of about 50 m of height, located at the junction of the route from Complutum to Carthago Nova, one of the principal Roman routes connecting the interior of the plateau with the southeast coast, and a road connecting Castulo with Saetabis.
The archaeological research from the last 30 years has highlighted the importance of this site, revealing a history from the Middle Bronze Age, through the Iberian era, the Roman period, and the Middle Ages to the twentieth century. The Middle Age period provided most of the information by an important Visigoth settlement located in the upper part of the “El Tolmo”, where an important Christian basilica was found between houses and cemeteries.
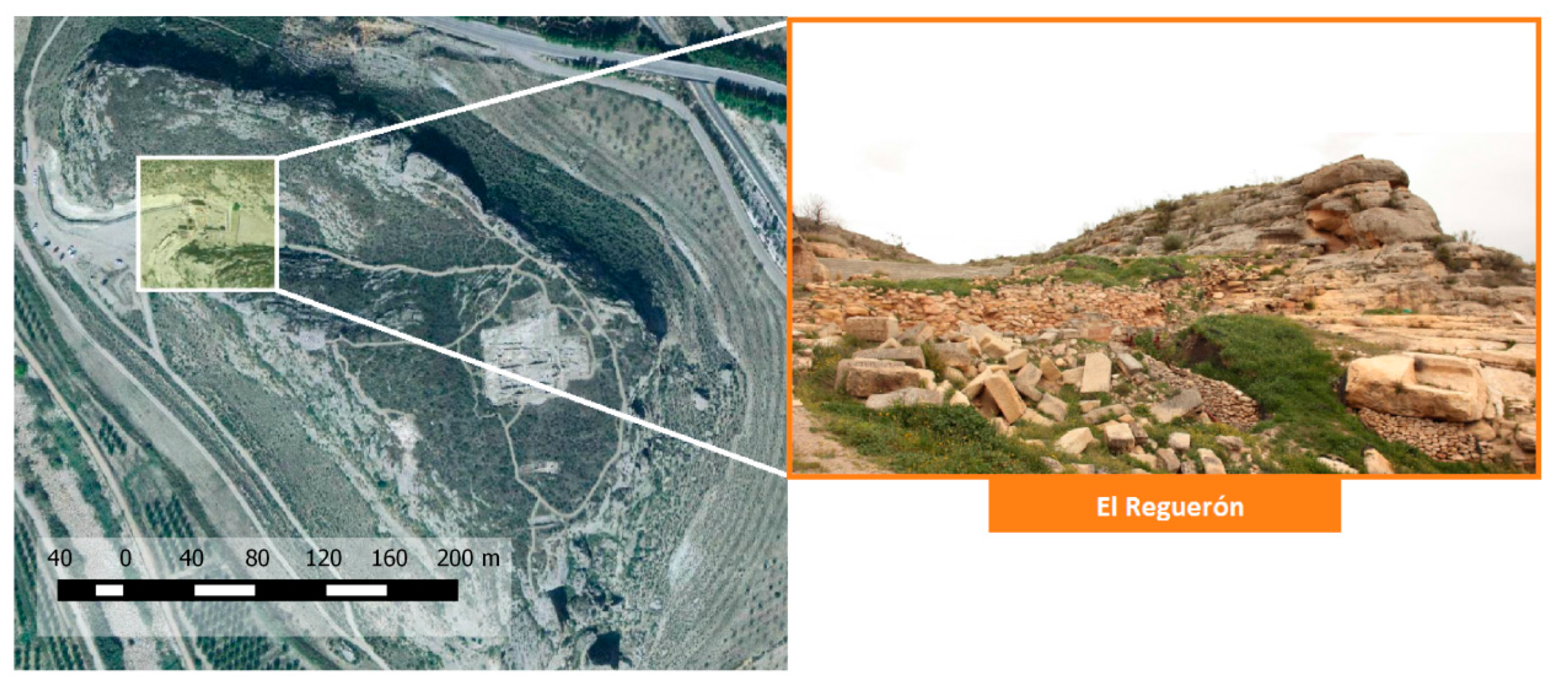
One of the most interesting areas of the archaeological site is “El Reguerón” (
Figure 6), an area of natural drainage 12 m in width, with a main entrance at the top of the hill where the city was located. In the settlement, an important fortification system consisting of three walls of different chronology and architectural typologies has been documented [
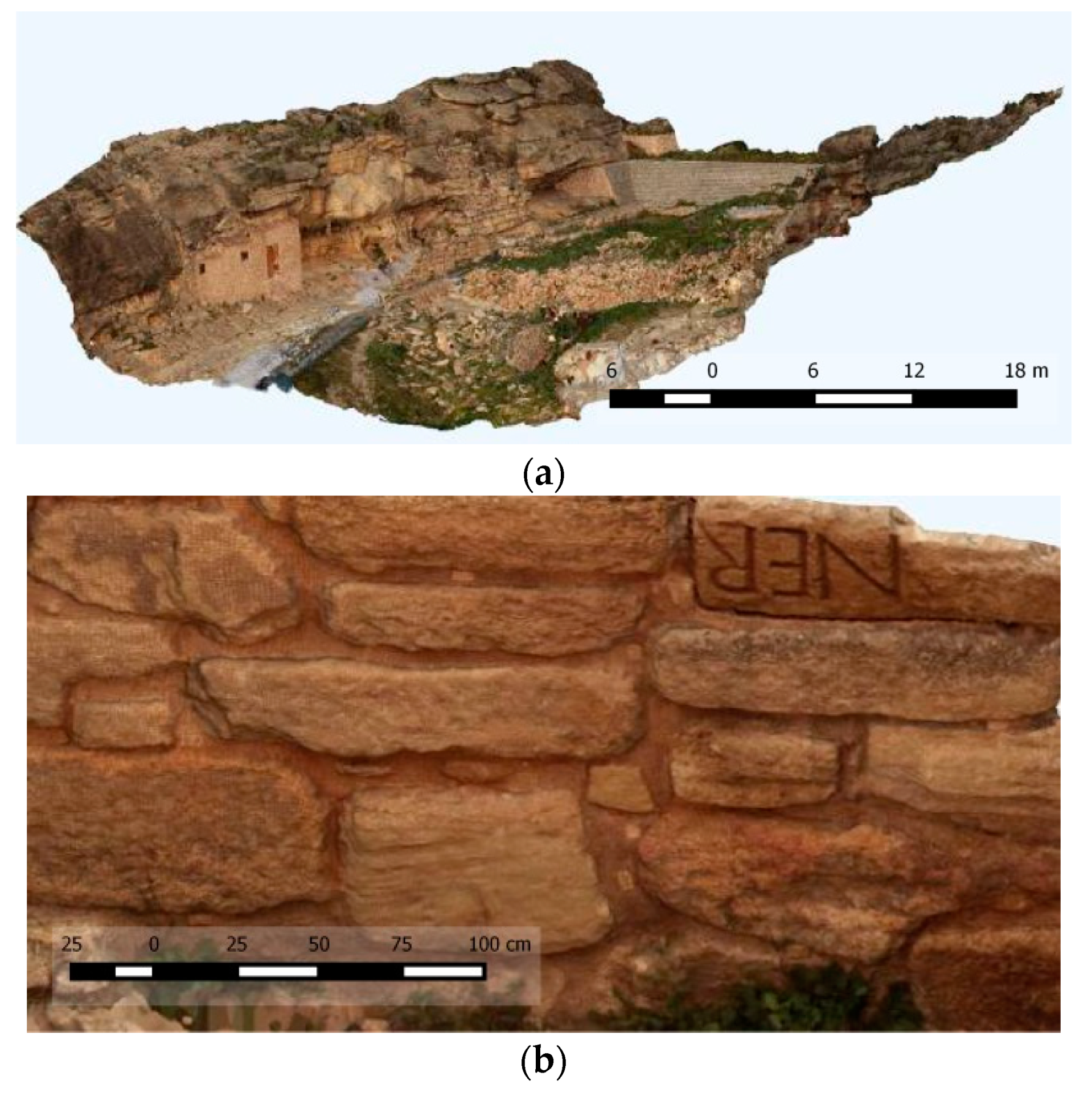
51]. The oldest fortification is represented by the so-called “embanked” wall and was built during the final phase of the Iberian period (4th−2nd century B.C.). Currently, only the remains of a wall 6 m high and 10 m wide at the top, embanked in the external front and built in irregular masonry work, was preserved in the soil. During the archaeological excavation of this ancient wall, an earlier phase, which dates back to the Middle Bronze Age, was discovered. The Iberian wall was successively used as a retaining wall for a new fortification building during Roman times when the “Tolmo de Minateda” probably received the title of municipality.
The last fortification found in “El Reguerón” comes from the period of peninsula occupation by the Visigoths (5th–6th century A.D.). This wall is presented as a solid, L-shaped bulwark that encloses the valley and flanks the main road access to the city. It is here at this point that a monumental gate, probably formed by two solid towers of blocks, was once located. Only partial remains have been preserved. The wall is formed by a line of blocks with inscriptions and architectural elements from older constructions (among which are examples from the Roman period).
The relevant archaeological stratification of this area with different structures and building types requires of a multi-data source and multi-sensor approach that allows us to properly record and classify archaeological surfaces, thereby establishing an integration of topographic data with documents of archaeological excavations.
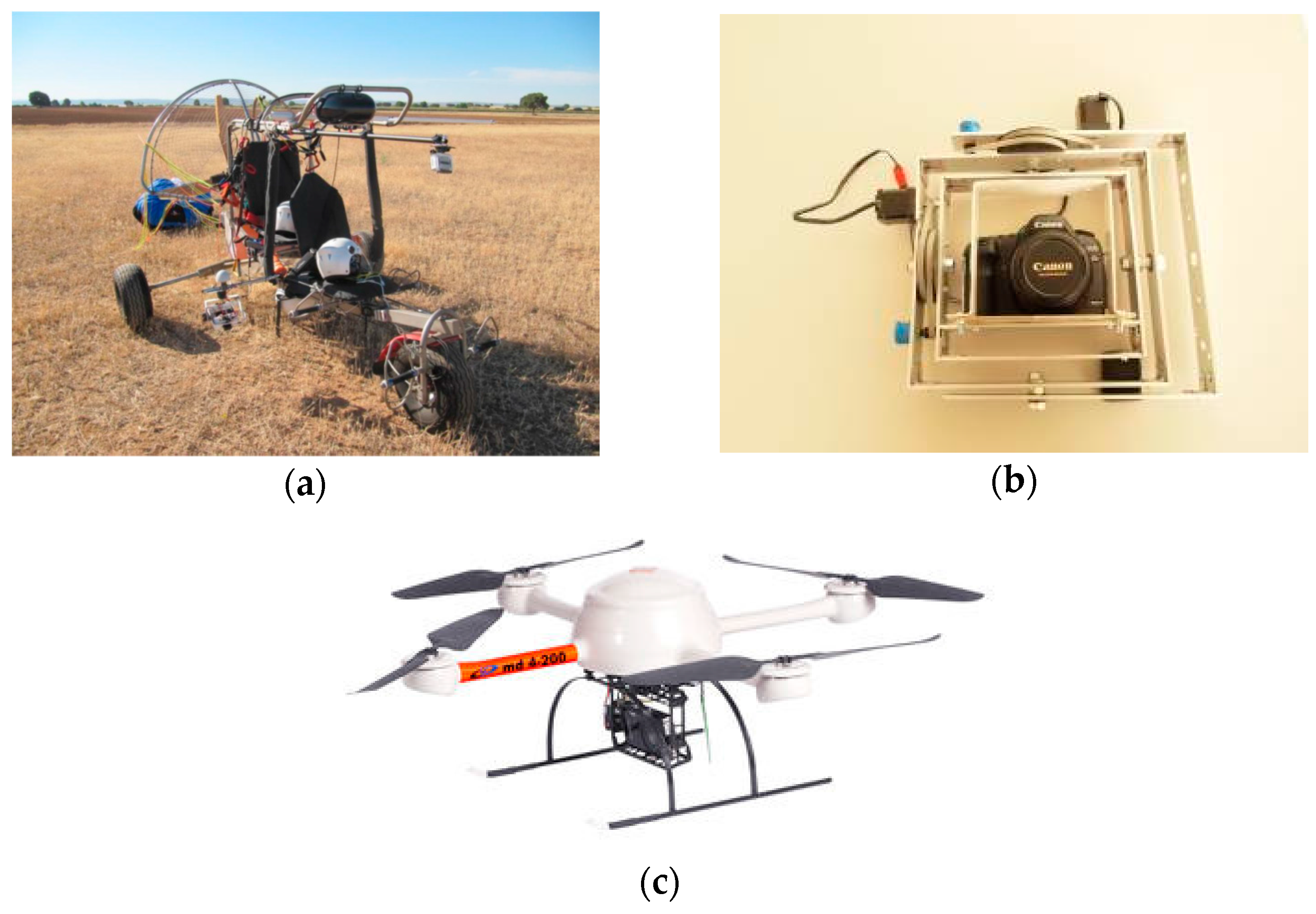
In order to fulfill the archaeological documentation requirements, the aerial data gathering was performed with a paratrike which allows us to enclose the whole extension of the archaeological site using a full-frame reflex camera, assisted by a specific gyrostabilized platform (MUSAS-MUltiSpectral Airborne Sensors) with a ground sample distance (GSD) of 3 cm. According to the GSD desired for the whole archaeological site and considering the camera specifications, a maximum flight height of 224 m was established. As a result, a total of 268 images along seven strips (NW-SE direction) were required for guaranteeing a side overlap of >30% and a forward overlap of >70%.
To record with higher spatial resolution the area of interest of the “El Regueron” site (
Figure 7), an UAV with an ultra-compact camera (
Table 5) acquired the fortified walls with a GSD of 1 cm. Finally, 25 images and a flight height of 32 m guaranteed the desired spatial resolution. The overlap parameters were the same.
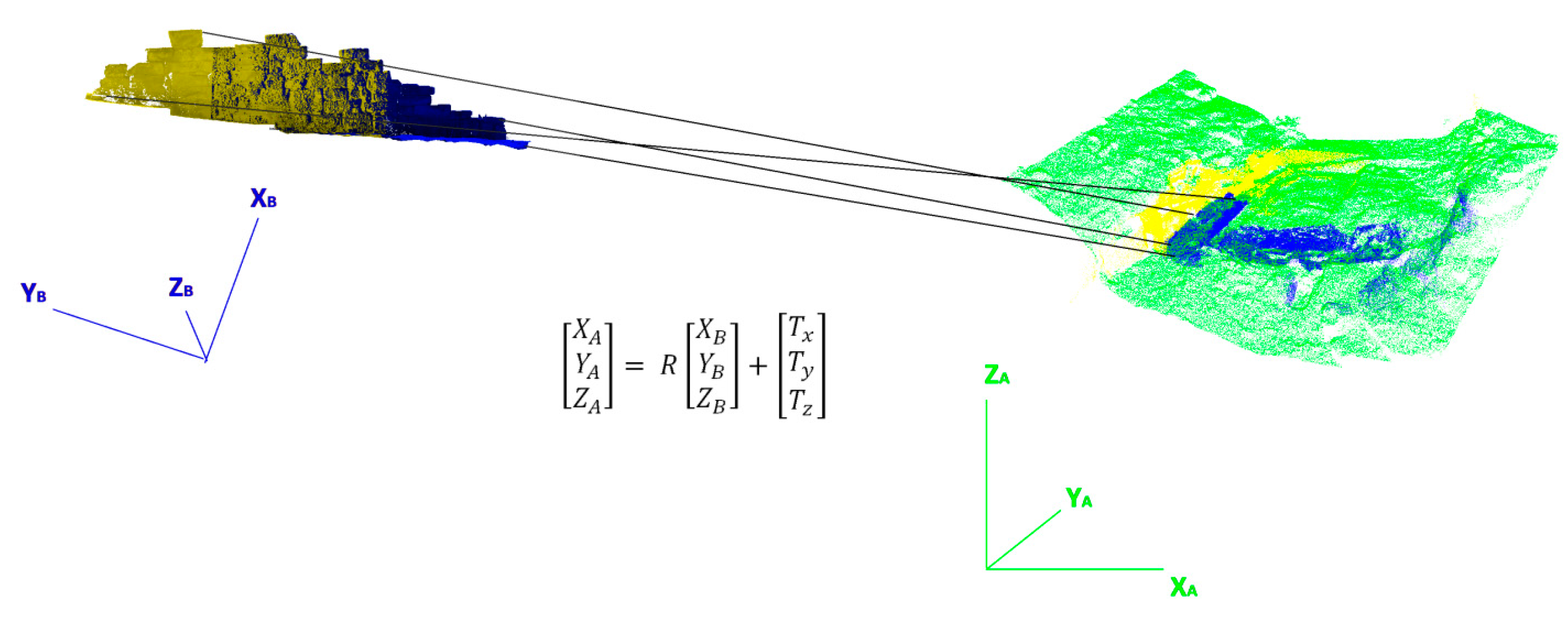
In addition, to increase the level of detail in the fortification walls and thus avoid the occlusions due to the effects of terrain relief (i.e., areas occluded or without information in the model generated by aerial photogrammetry), a combination of terrestrial photogrammetry and terrestrial laser scanner (TLS) was employed for improving the final 3D hybrid model. As a result, a total of 36 terrestrial oblique images and 13 TLS point clouds were acquired in order to avoid areas without information, guaranteeing a subcentimeter resolution.
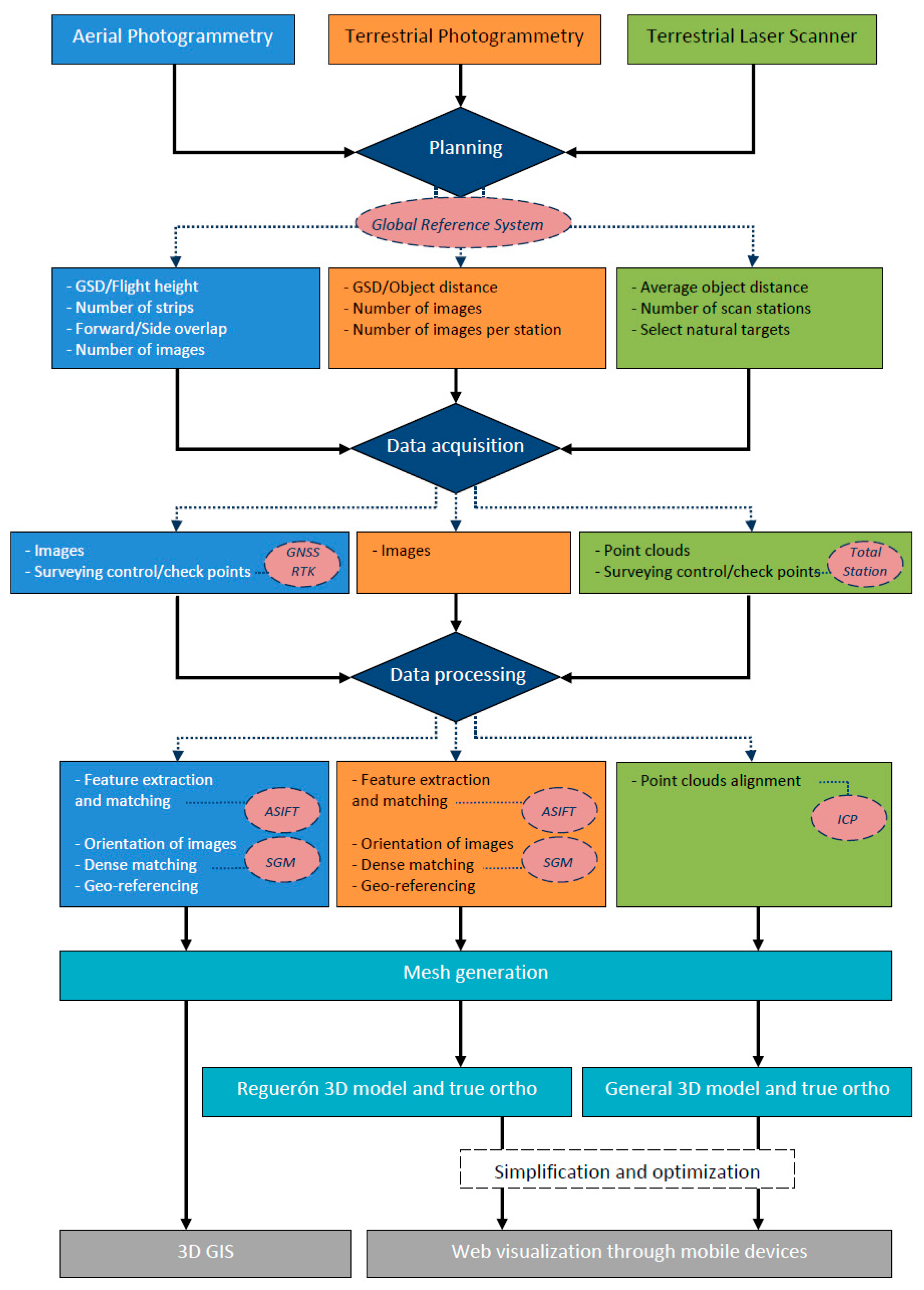
4.2. Workflow
The application of the multi-data source and multi-sensor fusion workflow was tested in the study area of “Tolmo de Minateda,” which includes a total of 9 ha.
Firstly, the aerial images were processed by the automated photogrammetric approach and the cameras were self-calibrated according to
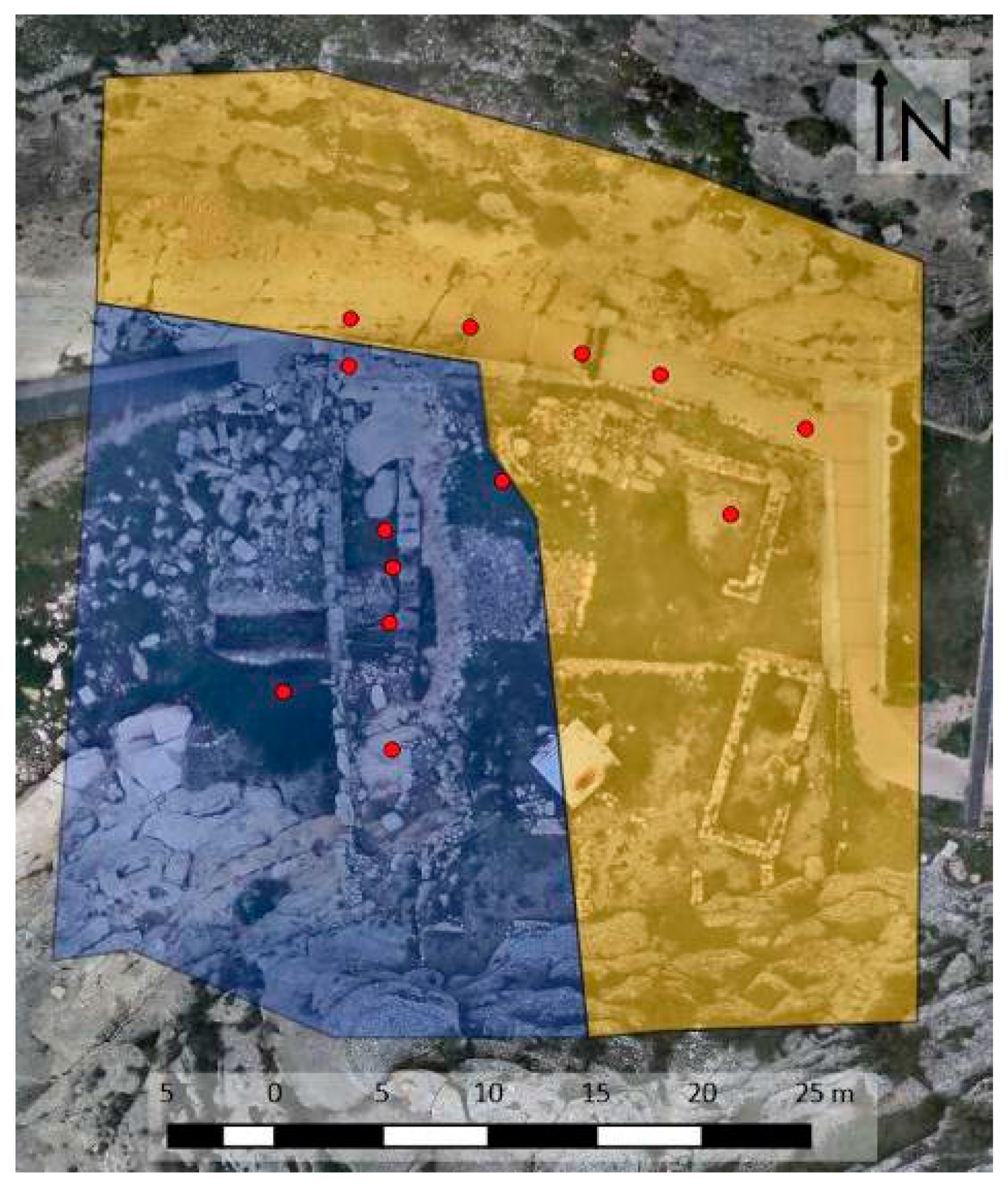
Section 3.2.2. As a result of this process, the raw reconstructed point cloud is obtained which contains 4,271,354 points, while the TLS integrated point cloud reaches up to 1,314,136 points. Secondly, the geo-referencing of the 3D model was solved by the employment of 28 control points homogeneously distributed across the site (but with higher density in the interest area), while ten were used as checkpoints. Finally, the final multi-resolution 3D model after triangulation is obtained (
Figure 8), encompassing the whole study area with a spatial resolution of 3 cm. A total of 10,542,505 triangles were obtained.
For the detailed area which integrates different data sources (i.e., terrestrial laser scanner and photogrammetry), a spatial filtering of 0.5 cm was applied to avoid areas with excessive point density caused by the different overlaps.
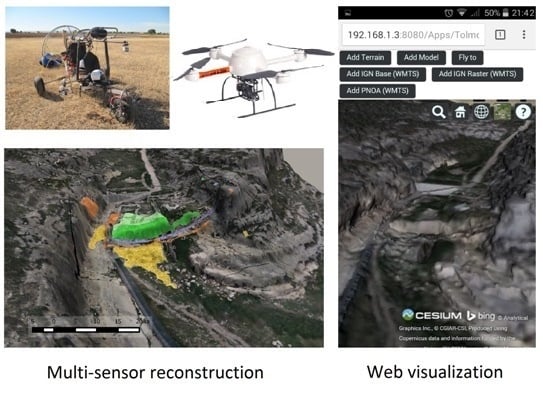
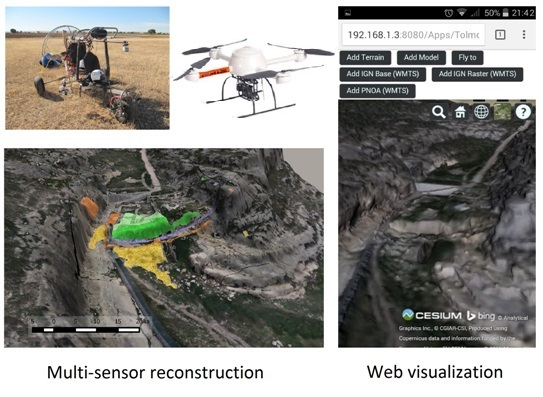
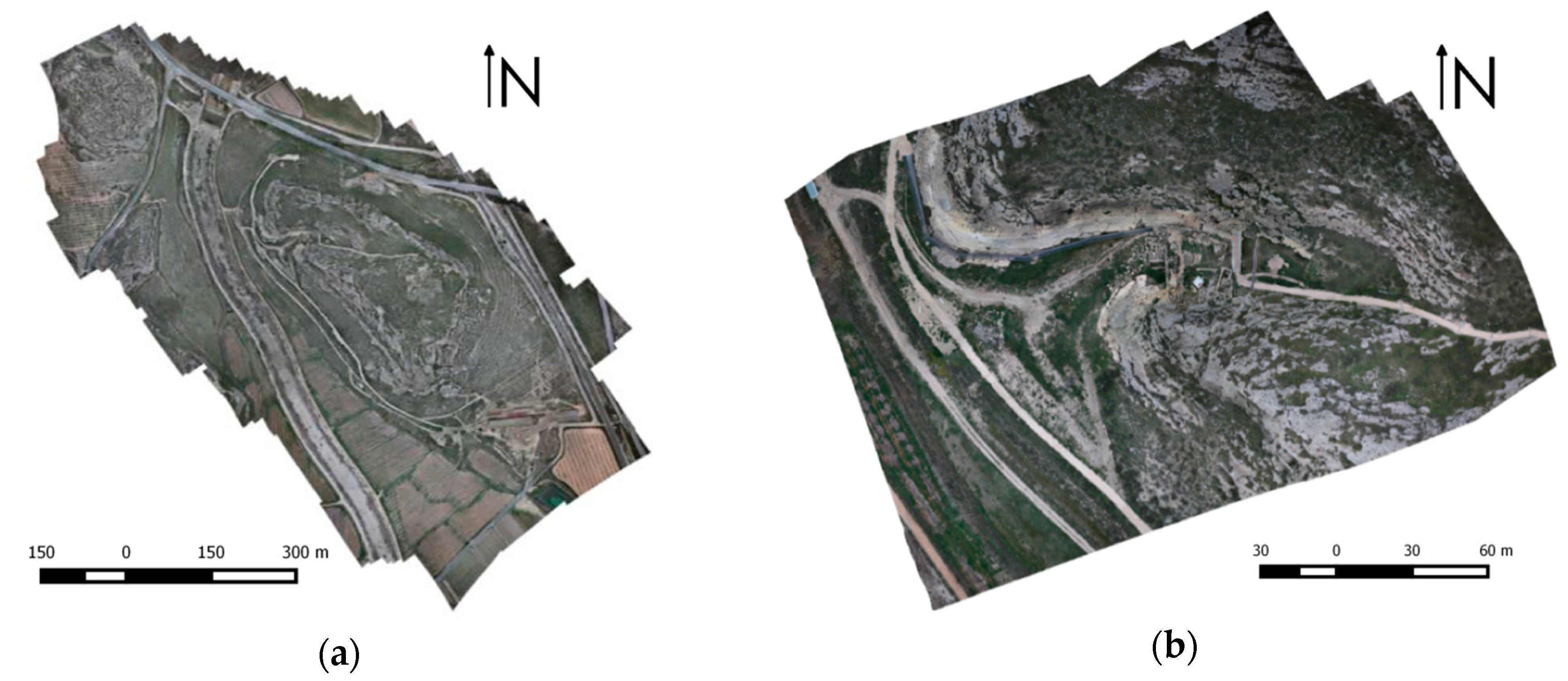
By this multi-resolution approach, the final inspection of the archaeological site could be adapted to any area, as illustrated with “El Reguerón”, where the subcentimete resolution achieved for the walls and construction (
Figure 9b) was integrated with the rest of the archaeological site (
Figure 9a). This multi-resolution capability opens a range of possibilities for a spatial analysis, settlement interpretation, pattern recognition, and the establishing of relationships among the elements (sites, artefacts locations, etc.).
In order to validate the final integration of the different data sources, a series of checkpoints were used. The different error components are shown in
Table 4. The average vertical error (2.6 cm) was higher than the horizontal error (1.4 cm), as was expected for the GNSS technique. An average precision of 3 cm for the 3D vector error was obtained, which is statistical compatible with the expected a priori error of 3.1 cm composed by the model and GNSS check point errors.
To manage more efficiently the available information of the archaeological settlement, true orthoimages were generated as derived products (
Figure 10), since they combined the photorealistic texture with the metric properties in an easy-to-use document for non-experts.
However, to allow a more complete interpretation and to make use of the potential of the generated 3D product, an integration with a 3DGIS tool, GeoWeb3D, was performed. In particular, the 3D geometry provided by the multi-sensor approach has been integrated with 2D archaeological archives such as sketches, pictures, part details, etc., thus enhancing the subsequent analysis and providing problem solving and decision-making capabilities.
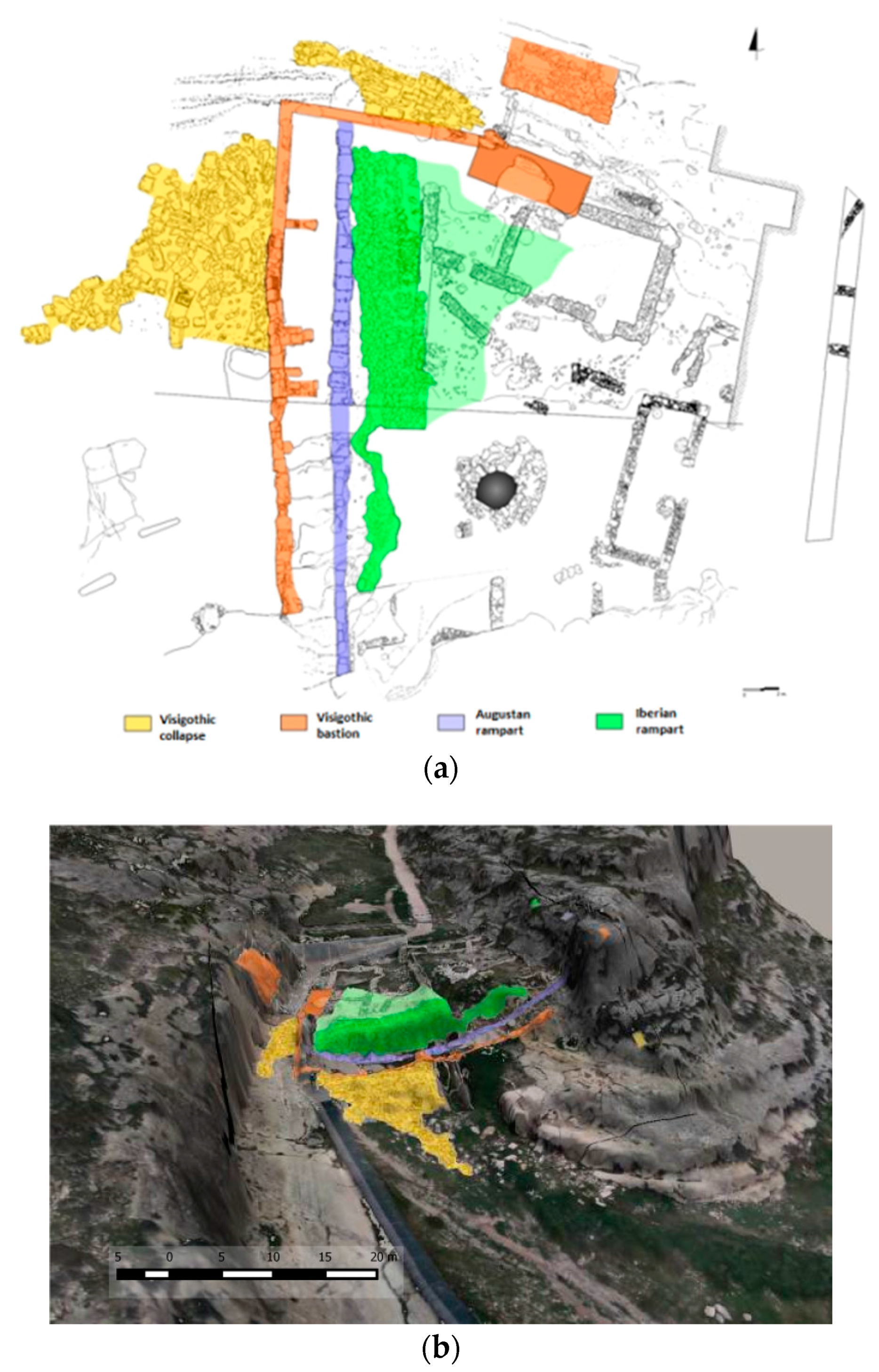
Figure 11 shows the integration of different historical events in the reconstructed 3D model.
The integration of 2D information and 3D models allows us to extract intangible information that improves the analysis capabilities of the archaeological settlement. For instance,
Figure 11 integrates an archaeological sketch of defensive constructions (2012) with the generated hybrid 3D model (2015). It should be noted that the high accuracy and proportion of the sketch is a perfect coincidence of the main homologous entities. However, some detached blocks belonging to the wall of the 3D model do not appear in the sketch. Analysing the position of blocks in the 3D model, it seems that they were spread along the natural drainage bed of the Tolmo, possibly suggesting that a runoff flow took place from the upper part of the Tolmo, providing this current block distribution.
Next, with the aim of showing the potential of analysing in situ the archaeological settlement, “El Reguerón” was tested using a mobile device (smartphone). The simplification and optimisation level was fixed considering different aspects: (i) the amount of 2D information which should be integrated; (ii) the minimum size of the interest elements and (iii) the level of reduction. A minimum resolution of 10 cm was established for the “El Reguerón” area.
Looking to the smallest and most emblematic elements of “El Reguerón,” it can be confirmed that these correspond to the blocks of the wall, which are bigger than the minimum resolution, meaning that they should be correctly represented. Subsequently, an iterative optimization process of the mesh was performed maintaining relevant information and stopping when the threshold of resolution (10 cm) was surpassed. As we can see in
Table 5, the simplified and optimised models maintain the initial resolution (10 cm), with a level of reduction of 75% in comparison with the simplified model (without optimisation).
The simplification and optimisation procedures have removed 31,039,445 points of the 33,856,298 initial points. However, in order to assess the final error of the simplification and optimisation strategy, we have compared the simplified and optimised model with the original point cloud, obtaining an average error of 0.2 mm and a standard deviation of ±22 mm.
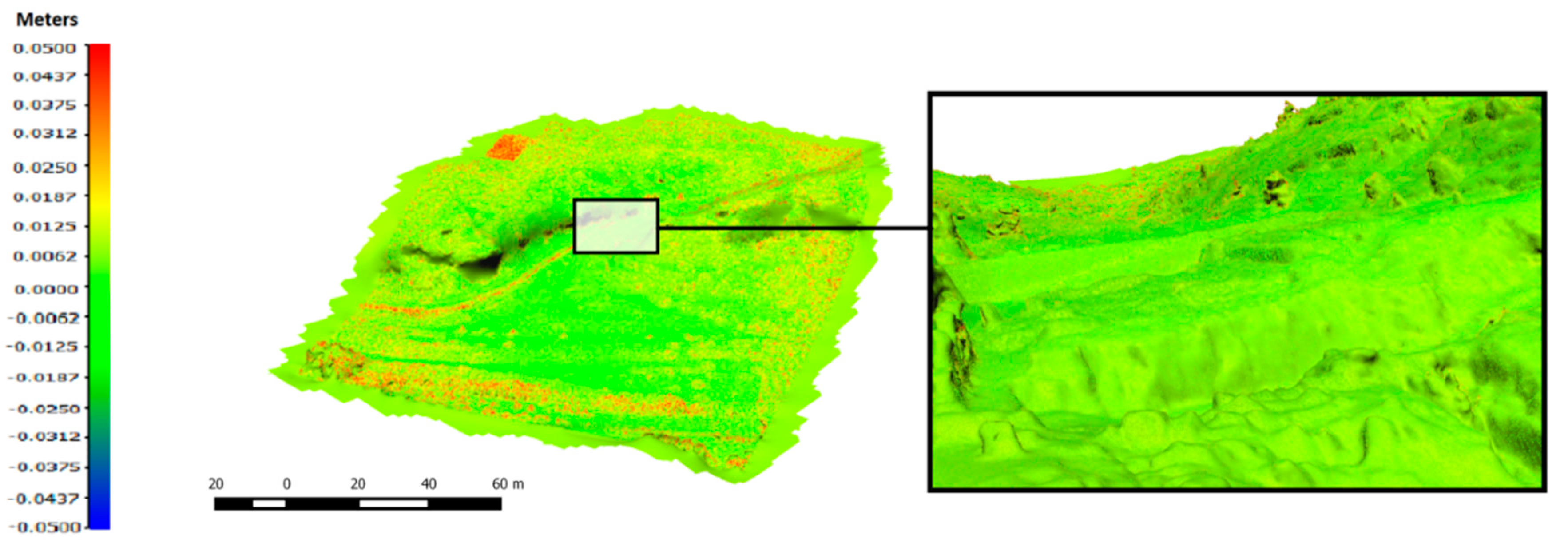
As we can see in
Figure 12, higher discrepancies are located in peripheral areas due to the presence of vegetation with an irregular typology. Conversely, the walled area exhibits minimum discrepancies always less than ±5 mm.
Finally, results were presented through the Web based on the Open Source library Cesium. A specific template based on HTML language was prepared to show the 3D models and additional information using external geospatial services such as WMS, MapServer, Google Earth or Bing, among others. Thanks to the flexibility and portability of the mobile devices, it was possible for the archaeologist to interact directly with the platform at the field: recording data and adding new information with corresponding attributes and descriptions. An example is outlined in
Figure 13, where the application is loaded in a smartphone BQ Aquaris E4.5 using Android 4.4.2 and Google Chrome 45. Results were incorporated to the archaeological information system and the spatial data infrastructure of the archaeological cultural heritage of Castilla La Mancha (ideARQ + SIA) [
50].
Additionally, the optimal value of points and triangles for the proper management of 3D models in smartphones was examined. For this aim, three levels of simplification were analysed using three, two and one million(s) triangles, respectively. Afterwards, loading and operation times together with RAM were monitored in order to see the best simplification level for a conventional smartphone.
Table 6 outlines the results obtained.
As we can see, with less than one million triangles, very good loading and operation times (instantaneous) are obtained, as well as an affordable RAM consumption for the majority of smartphones. Therefore, for optimal user experience and navigation for each visualization level (defined in terms of spatial resolution; see
Section 3.2.5), the maximum display area is cropped accordingly to this empirical number of triangles.



 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}